
Entropy-Assisted Computing of Low-Dissipative Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Survival below Minimum Dissipation Threshold
3. Minimum Viscosity in Discrete Phase-Space-Time



4. Entropic Lattice Boltzmann Algorithm
5. ELBM: Questions and Answers
- Is the entropic feedback in ELBM a stabilizing technique or a physically sound subgrid-scale model for turbulence?A: The ELBM should be viewed as a built-in subgrid model rather than a mere stabilization technique. Stabilization in ELBM is a by-product of the discrete-time H-theorem. Instead of a mere addition of artificial viscosity, the ELBM allows the effective viscosity to fluctuate around the target value . In order to clarify this point, note a few general features of the entropic stretch α.
- Over-relaxation: Thanks to convexity of the entropy function, the solution to Equation (6) always leads to over-relaxation, ;
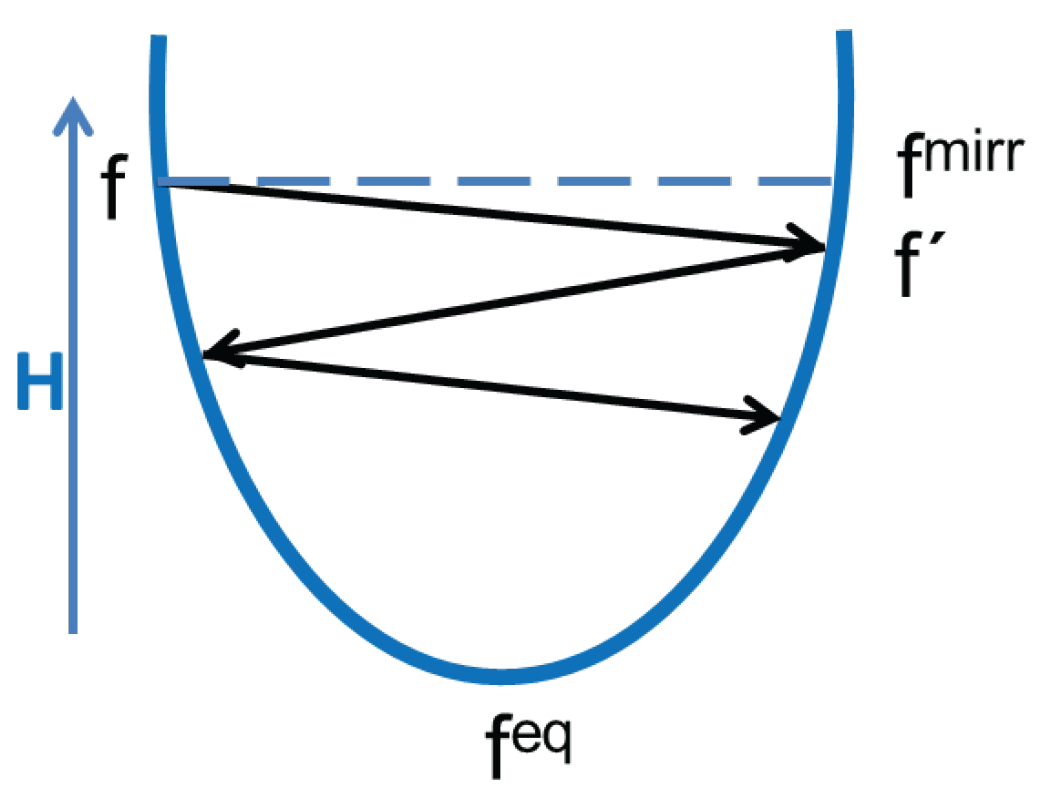
- Duality: Let f be a population vector, and its entropic mirror state, with the same value of the entropy, . If the entropy estimate is applied to instead of f, then the initial state is recovered in the form , with another stretch which satisfies a duality relation:Equation (7) implies that whenever , the opposite holds for the dual, .
- Hydrodynamic limit: whenever the simulation is resolved (populations stay close to the local equilibrium), the stretch α tends to the fixed value (and so does also the dual stretch, , according to (7)). Then ELBM self-consistently becomes equivalent to the lattice Bhatnagar–Gross–Krook (LBGK) equation () and recovers the Navier-Stokes equations with the kinematic viscosity,where is speed of sound (a lattice-dependent constant).Note that the above is a direct implication of the built-in H-theorem. Indeed, the resolved simulation, at the kinetic level, is characterized by the fact that all populations are asymptotically close to the local equilibrium. Then, the entropy function becomes well represented by its second-order approximation: at fixed locally conserved fields (density and momentum here), if , , then . The levels of the entropy are then asymptotically close to the levels of the above quadratic form. It is under such condition that the entropy estimate (6) results in . Note that the standard Chapman–Enskog approximation is valid under precisely the same condition of closeness to the local equilibrium, thereby the viscosity is the same for both ELBM and LBGK.
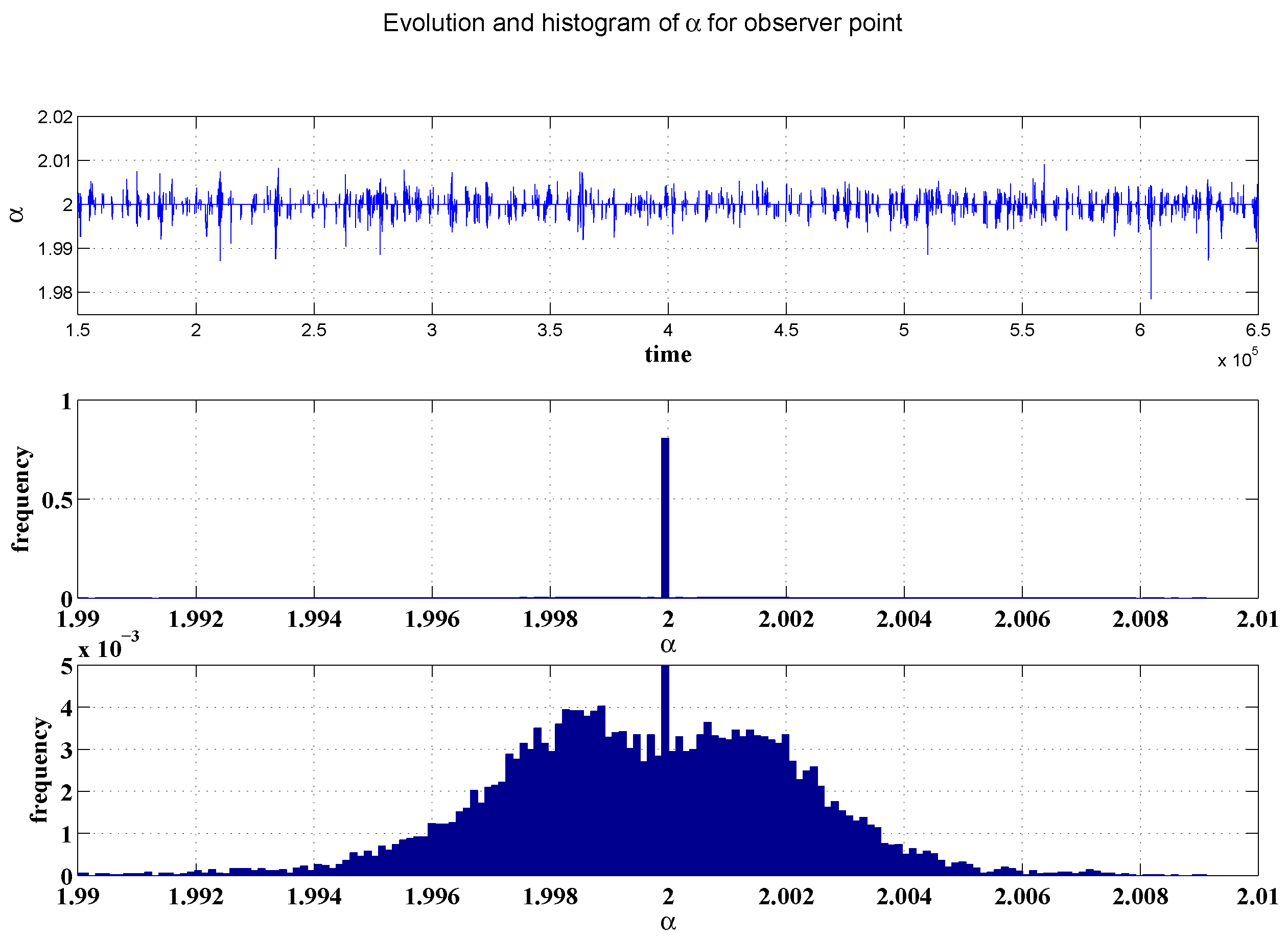
- Effective viscosity and self-averaging: The effective viscosity in the above notation reads,Depending on the outcome for stretch α, the effective viscosity is larger than the viscosity if , and it is smaller than if . In the first case, the (larger) effective viscosity leads to smoothing the velocity gradient at the given node, while in the second case, the smaller viscosity leads to a sharpening of the velocity gradient. Note that, when (vanishing viscosity ), the effective viscosity (9) can drop to even negative values if . This asymmetry between the over-relaxation being “shorter” () or “longer” () than the LBGK over-relaxation is the crucial implication of the compliance with the H-theorem: even if the effective viscosity becomes negative at some lattice nodes, this does not lead to numerical instability because even in that case the H-theorem (and the proper behavior of the total entropy) remains valid.Parameterization with the effective viscosity can be seen as an alternative to the parameterization with the over-relaxation α. Let us note that, if a pair is connected by the duality relation (7), then the mean value of the corresponding effective viscosity is equal to the viscosity (8),The relation (10) is termed self-averaging, and provides important albeit heuristic argument that the averaged-in-time effective viscosity in ELBM simulation is close to the viscosity . In other words, we expect that it is only the matter of resolution that the average effective viscosity deviates from . This assertion, while not rigorous, is supported by simulation (see Figure 3). The rapid fluctuations of the stretch α around at a given monitoring point chosen at random in the simulation domain are clearly seen in Figure 4.

- In summary, the ELBGK exploits the self-adaptive mechanism of effective viscosity by choosing automatically the over-relaxation α at each node to guarantee the H-theorem at all sites and all discrete time-steps. When the grid is coarsened, over-relaxation α becomes “smeared” in an interval, , with , and . The self-adapted over-relaxation set up by (6), results in two oppositely directed effects: if , the effective viscosity is larger than , and the ELBM will tend to smoothen any flow perturbation. On the other hand, if , the flow perturbation is enhanced (effective viscosity is smaller than ). In ELBM simulations, these two effects act simultaneously on various nodes, with the net effect combining stabilization (through smoothing, ) with the preservation of the resolution (through sharpening, ). Note that, as , the effective viscosity can even drop to negative values when . This, however, does not lead to instabilities as the total entropy balance remains under control by the discrete-time H-theorem. This all is very different from a conventional perspective on “eddy viscosity” turbulence modeling, and it is not surprising that ELBM does not reduce to familiar large eddy simulation (LES) models [16].
- 2.
- What is the relation of ELBM to the entropic stabilizing techniques proposed in CFD?A: During the last four decades numerous entropic stabilizing techniques have been proposed in computational fluid dynamics (CFD) (see, e.g., Refs [17,18,19,20,21,22,23,24,25] and references therein). The idea behind is, roughly speaking, to maintain an appropriate amount of artificial viscosity through the analysis of discretization of the entropy balance (physical or artificial). In this regards, ELBM is based on a different premise: it applies to strictly discrete systems (in velocity-space-time), and the discrete-time H-theorem does not reduce to the estimate of the entropy production (cf., e.g., [26]).
- 3.
- How ELBM performs in comparison to other stabilizing techniques proposed for LBM?A: The closest analog of the conventional stabilization techniques in the LBM setting is perhaps the method of entropic limiters [27,28,29]. The idea behind is to measure the closeness of the pre-collision state to the corresponding local equilibrium (in the sense of the entropy difference), and to apply equilibration instead of over-relaxation if the difference exceeds a user-defined threshold. This is similar to conventional artificial viscosity stabilization techniques in CFD. Various versions of limiters were considered [27,28,29]. The authors of [29] claimed that entropic limiters “perform better” than ELBM.
- 4.
- What is the main numerical mechanism promoting stability in ELBM?A: Stability is promoted by the discrete-time H-theorem. Note that the implication of the H-theorem in the presence of the over-relaxation allows post-collision distributions to be both closer to the equilibrium than the LBGK outcome () or further away from the equilibrium (). It must be noted that, in principle, for some pre-collision states, the corresponding entropic mirror state may not exist (and hence no entropy balance is possible). However, this happens beyond the domain of validity of the lattice Boltzmann models, and is of no concern in practice. In particular, pathological cases (no solution for α) occur in none of the simulations referred to in this paper.
- 5.
- Very recently, in Ref. [30], Karlin et al. presented a new entropic stabilizer for LB schemes. How is it different from the ELBM?A: ELBM is based on the discrete-time H-theorem which is imposed in a rather “orthodox” manner through the entropy balance condition (6) for the over-relaxation. A different realization of the entropic control was introduced recently by three of the present authors in [30] (we refer to this as KBC model). The idea is to replace the entropic over-relaxation on all the non-conserved moments as it is done in ELBM by a combination of the standard (unsupervised) over-relaxation of the stresses with the proper equilibration of the rest of the non-conserved moments. More specifically, if we write a moment representation of the populations, , where is the contribution of locally conserved fields, are the stresses and are the remaining higher-order moments, then the mirror state for KBC models reads,where is the entropic stabilizer which is found by minimizing the entropy in the post-collision state (4) with the mirror state (11):The rationale behind is this: The over-relaxation of the stresses in the mirror state is the only formal condition to recover the viscosity (8); hence, an optimal post-collision state should minimize the entropy under this constraint. Thus, the KBC post-collision state is a quasi-equilibrium which corresponds to the minimum of the entropy function once all the relevant constraints are applied. Moreover, Equation (12) admits the following approximate solution,with the entropic scalar product, and , . While (11) lumps together all the higher-order moments in the h-part of the populations, a generalization which makes a distinction within these moments is straightforward: For with m labeling the different higher-order moments (or groups of such moments), we have instead of (11),while the formula (13) generalizes towith the inverse of the correlation matrix . While the H-theorem is not directly imposed in the KBC models (unlike the ELBM), simulations of various setups demonstrated they are ‘virtually indestructible’ (Ref. [31]).Note that in both ELBM and KBC models (and eventually in any lattice Boltzmann model) a statement that “it recovers the viscosity ” refers only to a fully resolved simulation. Validity of the Navier-Stokes equation at small scales for a given simulation is checked independently, for example, by measuring the viscosity in the energy and enstrophy balance equations. For a detailed analysis of these aspects for the KBC models we refer to recent papers [32,33].
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nicolis, G.; Prigogine, I. Self-Organization in Nonequilibrium Systems; Wiley: Hoboken, NJ, USA, 1977. [Google Scholar]
- Frisch, U.; Hasslacher, B.; Pomeau, Y. Lattice-gas automata for the Navier-Stokes equation. Phys. Rev. Lett. 1986, 56. [Google Scholar] [CrossRef] [PubMed]
- Higuera, F.J.; Succi, S. Simulating the flow around a circular cylinder with a lattice Boltzmann equation. Europhys. Lett. 1989, 8. [Google Scholar] [CrossRef]
- Succi, S. The Lattice Boltzmann Equation for Fluid Dynamics and Beyond; Clarendon Press: Oxford, UK, 2001. [Google Scholar]
- Karlin, I.V.; Ferrante, A.; Öttinger, H.C. Perfect entropy functions of the lattice Boltzmann method. Europhys. Lett. 1999, 47, 182–188. [Google Scholar] [CrossRef]
- Boltzmann, L. Vorlesungen über Gastheorie; Johann Ambrosius Barth: Leipzig, Germany, 1896. (In German) [Google Scholar]
- Lebowitz, J.L. Boltzmann’s entropy and time’s arrow. Phys. Today 1993, 46, 32. [Google Scholar] [CrossRef]
- Lieb, E.H.; Yngvason, J. The Physics and Mathematics of the Second Law of Thermodynamics. Phys. Rep. 1999, 310, 1–96. [Google Scholar] [CrossRef]
- Kolmogorov, A.N. The local structure of turbulence in incompressible viscous fluid for very large Reynolds number. Dokl. Akad. Nauk SSSR 1941, 30, 301–305. [Google Scholar] [CrossRef]
- Chen, H.; Kandasamy, S.; Orszag, S.; Shock, R.; Succi, S.; Yakhot, V. Extended Boltzmann kinetic equation for turbulent flows. Science 2003, 301, 633–636. [Google Scholar] [CrossRef] [PubMed]
- Chikatamarla, S.S.; Ansumali, S.; Karlin, I.V. Entropic lattice Boltzmann models for hydrodynamic in three dimensions. Phys. Rev. Lett. 2006, 97, 010201. [Google Scholar] [CrossRef] [PubMed]
- Chikatamarla, S.S.; Karlin, I.V. Entropic lattice Boltzmann method for turbulent flow simulations: Boundary conditions. Physica A 2013, 392, 1925–1930. [Google Scholar] [CrossRef]
- Karlin, I.V.; Succi, S.; Chikatamarla, S.S. Comment on “Numerics of the lattice Boltzmann method: Effects of collision models on the lattice Boltzmann simulations”. Phys. Rev. E 2011, 84, 068701. [Google Scholar] [CrossRef] [PubMed]
- Frapolli, N.; Chikatamarla, S.S.; Karlin, I.V. Multispeed entropic lattice Boltzmann model for thermal flows. Phys. Rev. E 2014, 90, 043306. [Google Scholar] [CrossRef] [PubMed]
- Mazloomi M, A.; Chikatamarla, S.S.; Karlin, I.V. Entropic lattice Boltzmann method for multiphase flows. Phys. Rev. Lett. 2015, 114, 174502. [Google Scholar] [CrossRef] [PubMed]
- Malaspinas, O.; Deville, M.; Chopard, B. Towards a physical interpretation of the entropic lattice Boltzmann method. Phys. Rev. E 2008, 78, 066705. [Google Scholar] [CrossRef] [PubMed]
- Lax, P.D. Hyperbolic Systems of Conservation Laws and the Mathematical Theory of Shock Waves; Society for Industrial and Applied Amathematics (SIAM): Philadelphia, PA, USA, 1973. [Google Scholar]
- Harten, A.; Hyman, J.M.; Lax, P.D.; Keyfitz, B. On finite-difference approximations and entropy conditions for shocks. Commun. Pure Appl. Math. 1976, 29, 297–322. [Google Scholar] [CrossRef]
- Harten, A. On the symmetric form of systems of conservation laws with entropy. J. Comput. Phys. 1983, 49, 151–164. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Franca, L.P.; Mallet, M. A new finite element formulation for computational fluid dynamics: I. Symmetric forms of the compressible Euler and Navier-Stokes equations and the second law of thermodynamics. Comput. Method Appl. Mech. Eng. 1986, 54, 223–234. [Google Scholar] [CrossRef]
- Tadmor, E. Entropy stability theory for difference approximations of nonlinear conservation laws and related time-dependent problems. Acta Numer. 2003, 12, 451–512. [Google Scholar] [CrossRef]
- Tadmor, E.; Zhong, W.G. Entropy stable approximations of Navier-Stokes equations with no artificial numerical viscosity. J. Hyper. Differ. Equ. 2006, 3, 529–559. [Google Scholar] [CrossRef]
- Naterer, G.F.; Camberos, J.A. Entropy and the second law fluid flow and heat transfer simulation. J. Thermophys. Heat Transf. 2003, 17, 360–371. [Google Scholar] [CrossRef]
- Naterer, G.F.; Camberos, J.A. Entropy Based Design and Analysis of Fluids Engineering Systems; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Fisher, T.C.; Carpenter, M.H. High-order entropy stable finite difference schemes for nonlinear conservation laws: Finite domains. J. Comput. Phys. 2013, 252, 518–557. [Google Scholar] [CrossRef]
- Succi, S.; Karlin, I.V.; Chen, H.D. Colloquium: Role of the H theorem in lattice Boltzmann hydrodynamics. Rev. Mod. Phys. 2002, 74, 1203–1220. [Google Scholar] [CrossRef]
- Brownlee, R.A.; Gorban, A.N.; Levesley, J. Stabilization of the lattice Boltzmann method using the Ehrenfests’ coarse-graining idea. Phys. Rev. E 2006, 74, 037703. [Google Scholar] [CrossRef] [PubMed]
- Brownlee, R.A.; Gorban, A.N.; Levesley, J. Nonequilibrium entropy limiters in lattice Boltzmann methods. Physica A 2008, 387, 385–406. [Google Scholar] [CrossRef]
- Gorban, A.N.; Packwood, D.J. Enhancement of the stability of lattice Boltzmann methods by dissipation control. Physica A 2014, 414, 285–299. [Google Scholar] [CrossRef]
- Karlin, I.V.; Bösch, F.; Chikatamarla, S.S. Gibbs’ principle for the lattice-kinetic theory of fluid dynamics. Phys. Rev. E 2014, 90, 031302. [Google Scholar] [CrossRef] [PubMed]
- Mattila, K.K.; Hegele, L.A.; Philippi, P.C. Investigation of an entropic stabilizer for the lattice-Boltzmann method. Phys. Rev. E 2015, 91, 063010. [Google Scholar] [CrossRef] [PubMed]
- Bösch, F.; Chikatamarla, S.S.; Karlin, I.V. Entropic multi-relaxation lattice Boltzmann scheme for turbulent flows. Phys. Rev. E 2015, 92, 043309. [Google Scholar] [CrossRef] [PubMed]
- Bösch, F.; Chikatamarla, S.S.; Karlin, I.V. Entropic Multi-Relaxation Models for Simulation of Fluid Turbulence. Available online: http://arxiv.org/abs/1507.02509 (accessed on 8 December 2015).
- Finne, A.P.; Araki, T.; Blaauwgeers, R.; Eltsov, V.B.; Kopnin, N.B.; Krusius, M.; Skrbek, L.; Tsubota, M.; Volovik, G.E. An intrinsic velocity-independent criterion for superfluid turbulence. Nature 2003, 424, 1022–1025. [Google Scholar] [CrossRef] [PubMed]
- Vogelsberger, M.; Genel, S.; Springel, V.; Torrey, P.; Sijacki, D.; Xu, D.; Snyder, G.; Bird, S.; Nelson, D.; Hernquist, L. Properties of galaxies reproduced by a hydrodynamic simulation. Nature 2014, 509, 177–182. [Google Scholar] [CrossRef] [PubMed]
- Cavagna, A.; Giardina, I.; Ginelli, F.; Mora, T.; Piovani, D.; Tavarone, R.; Walczak, A.M. Dynamical maximum entropy approach to flocking. Phys. Rev. E 2014, 89, 042707. [Google Scholar] [CrossRef] [PubMed]
- Barato, A.C.; Seifert, U. Unifying Three Perspectives on Information Processing in Stochastic Thermodynamics. Phys. Rev. Lett. 2014, 112, 090601. [Google Scholar] [CrossRef] [PubMed]
- Han, B.; Wang, J. Least dissipation cost as a design principle for robustness and function of cellular networks. Phys. Rev. E 2008, 77, 031922. [Google Scholar] [CrossRef] [PubMed]
- England, J.L. Statistical physics of self-replication. J. Chem. Phys. 2013, 139, 121923. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karlin, I.V.; Bösch, F.; Chikatamarla, S.S.; Succi, S. Entropy-Assisted Computing of Low-Dissipative Systems. Entropy 2015, 17, 8099-8110. https://0-doi-org.brum.beds.ac.uk/10.3390/e17127867
Karlin IV, Bösch F, Chikatamarla SS, Succi S. Entropy-Assisted Computing of Low-Dissipative Systems. Entropy. 2015; 17(12):8099-8110. https://0-doi-org.brum.beds.ac.uk/10.3390/e17127867
Chicago/Turabian StyleKarlin, Ilya V., Fabian Bösch, Shyam S. Chikatamarla, and Sauro Succi. 2015. "Entropy-Assisted Computing of Low-Dissipative Systems" Entropy 17, no. 12: 8099-8110. https://0-doi-org.brum.beds.ac.uk/10.3390/e17127867