
Entropy Minimization Design Approach of Supersonic Internal Passages

Abstract
:1. Introduction


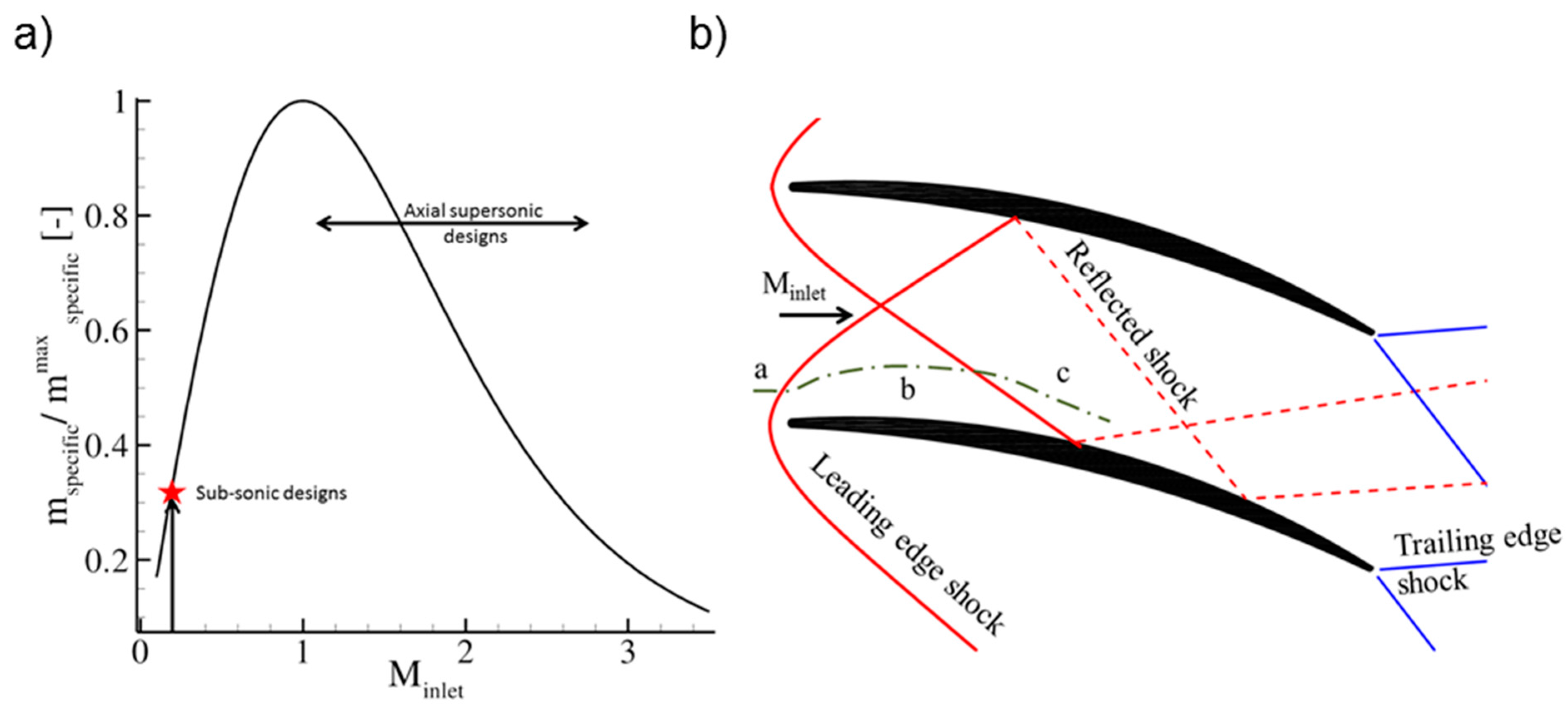
2. Allowable Turning through Supersonic Passages

3. Numerical Flow Analysis Method
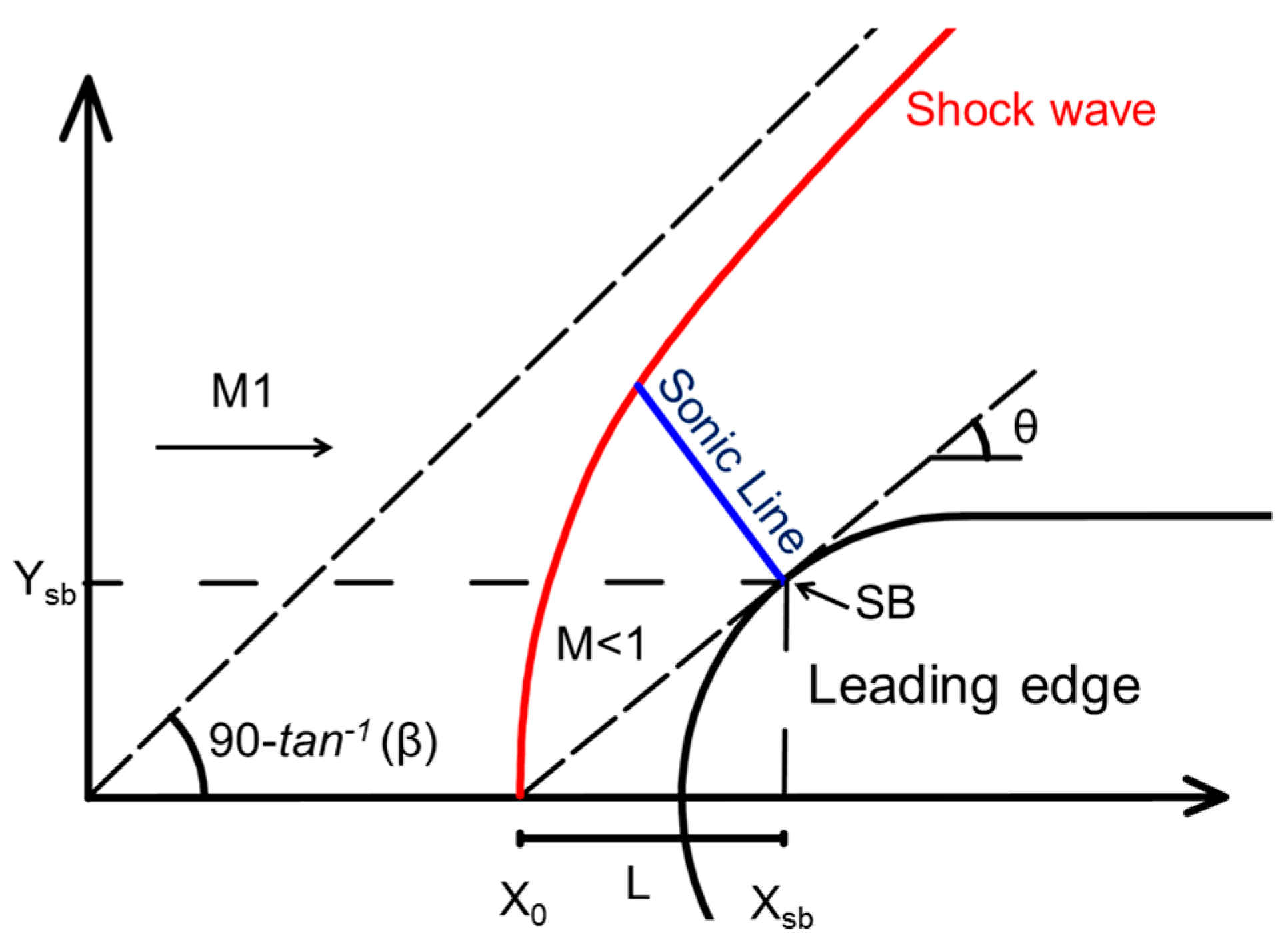
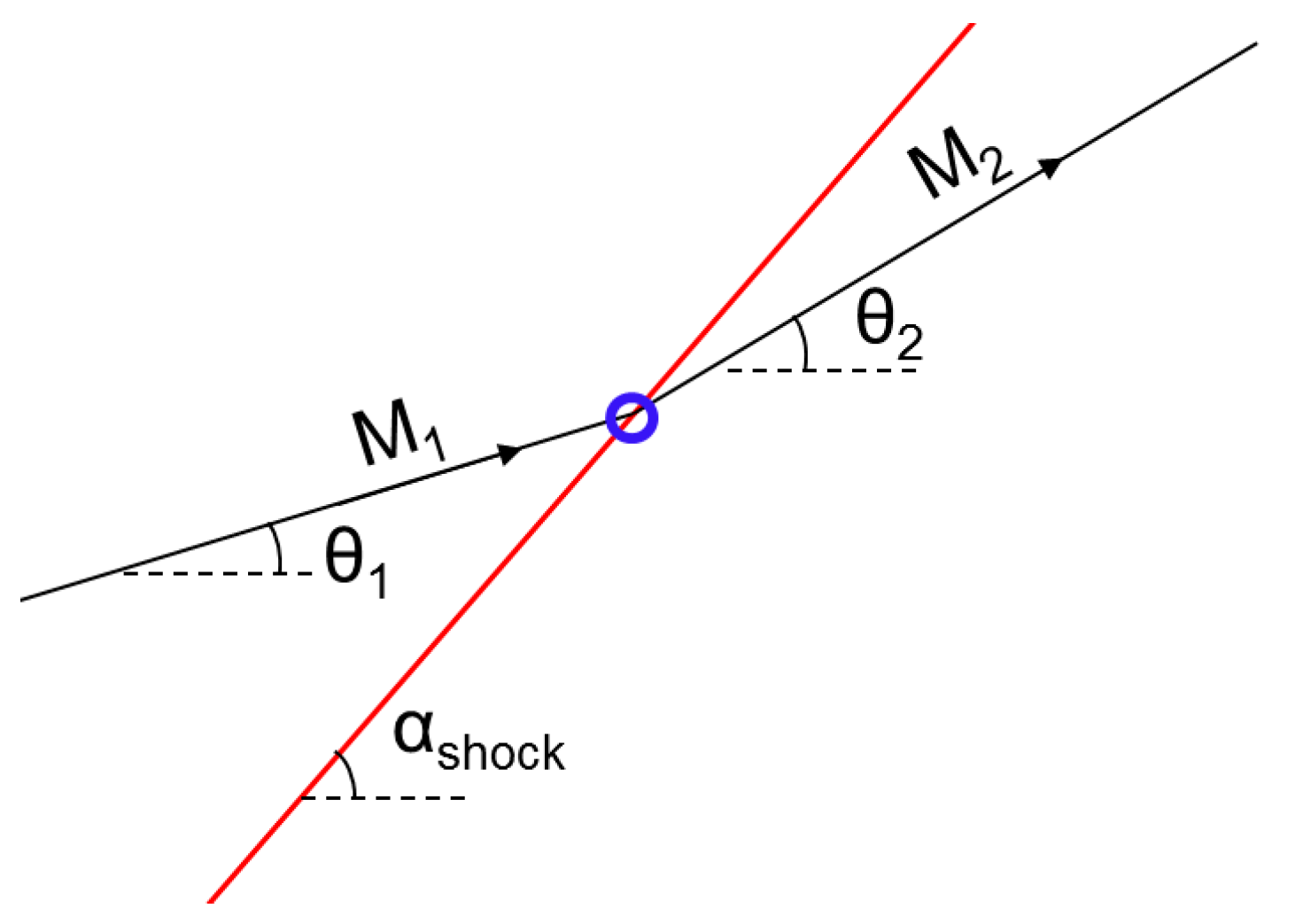
3.1. Leading Edge Shock Modeling


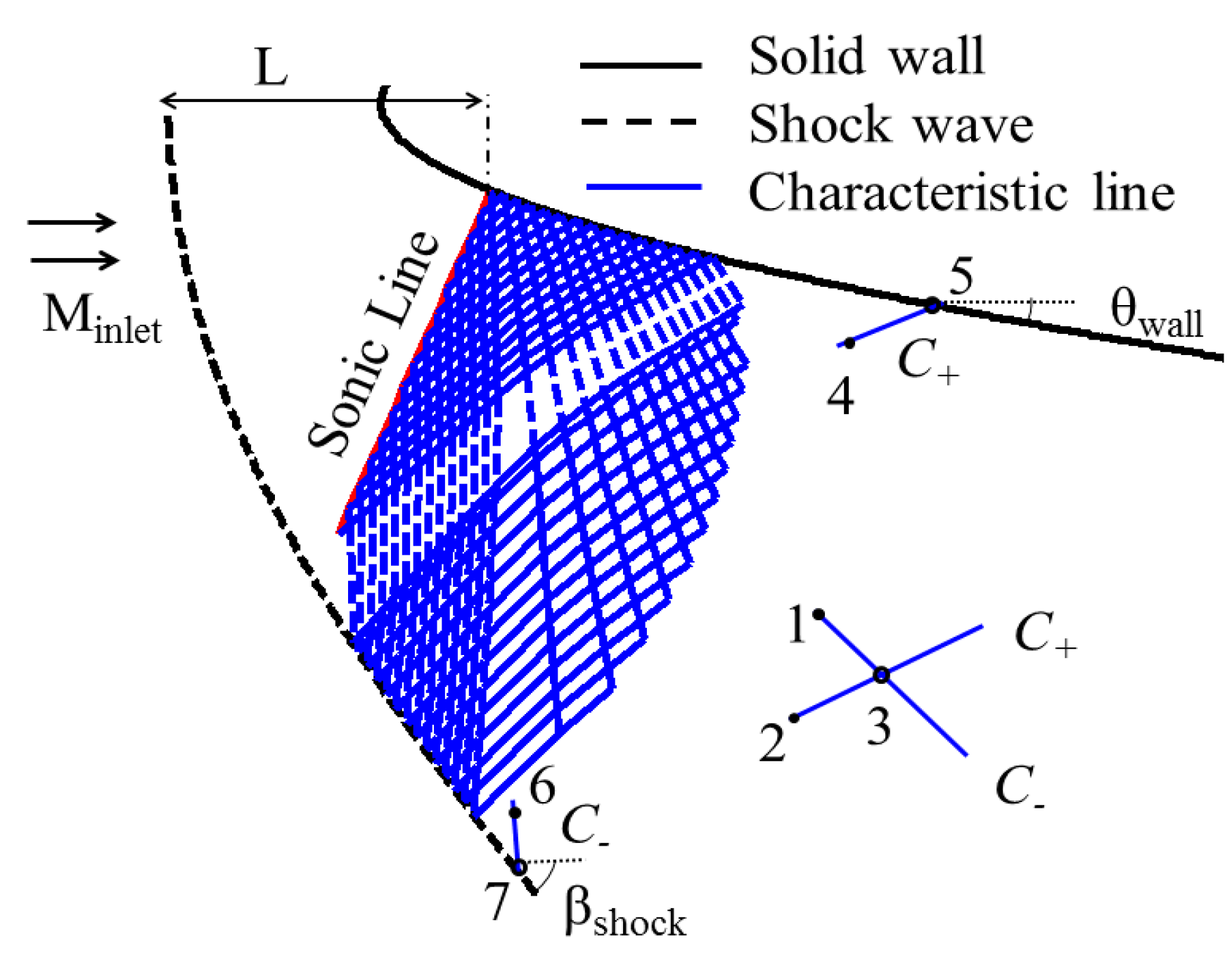
3.2. Method of Characteristics


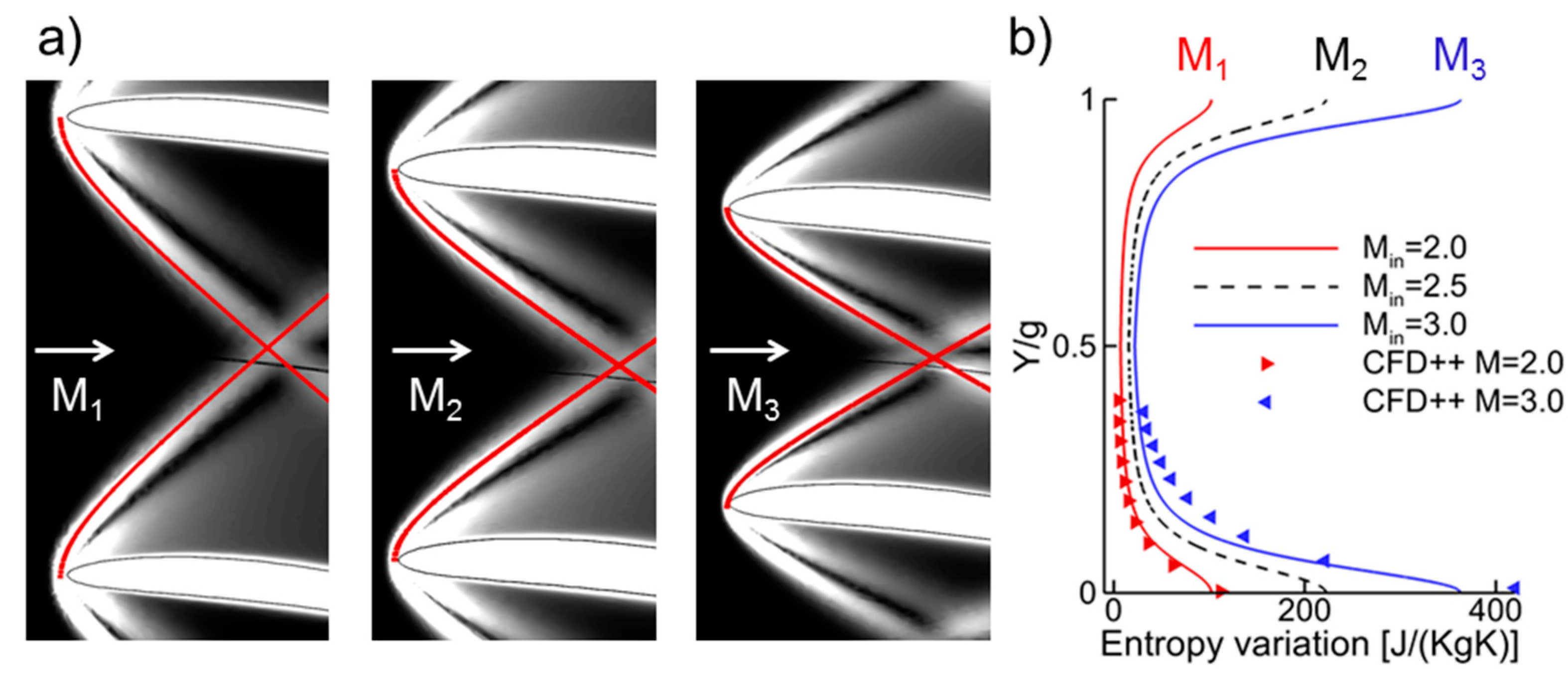
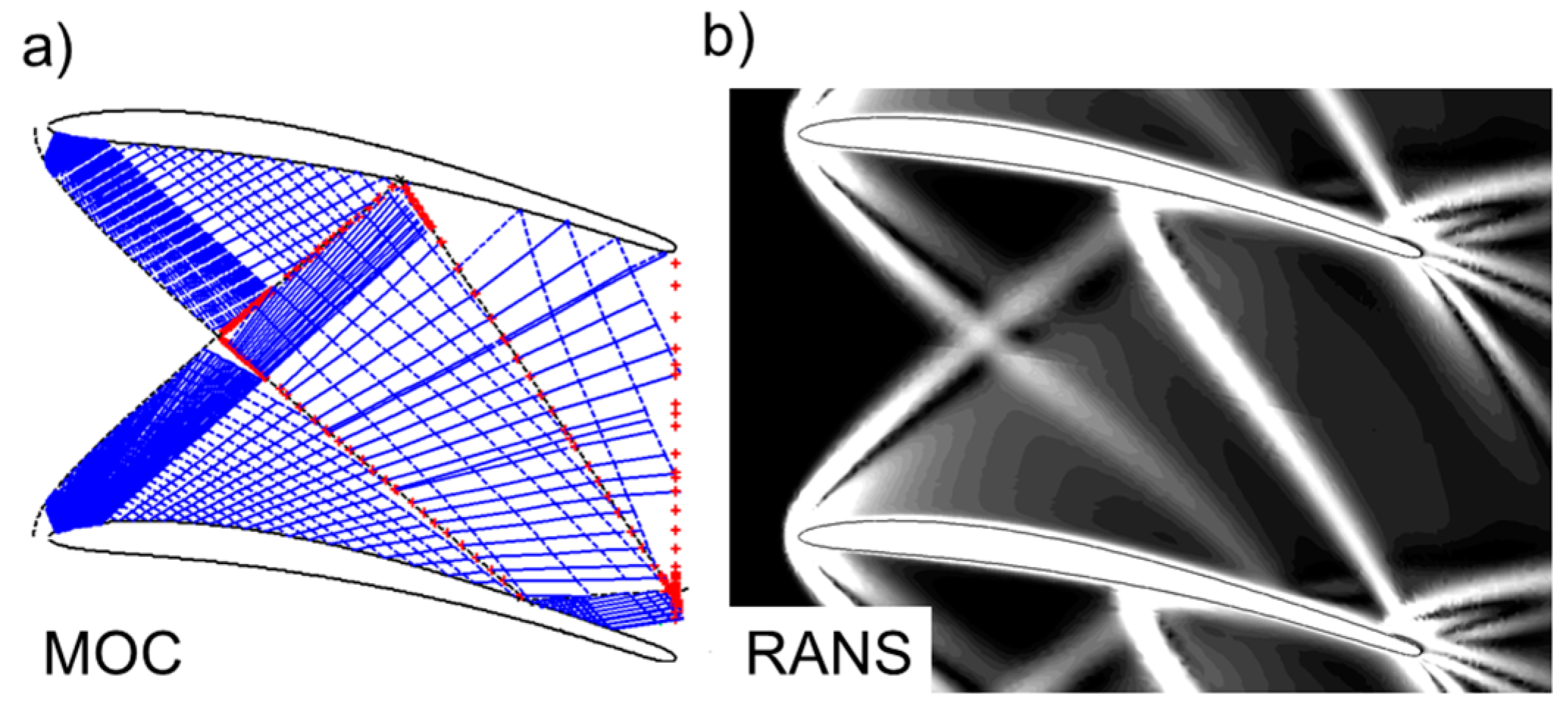
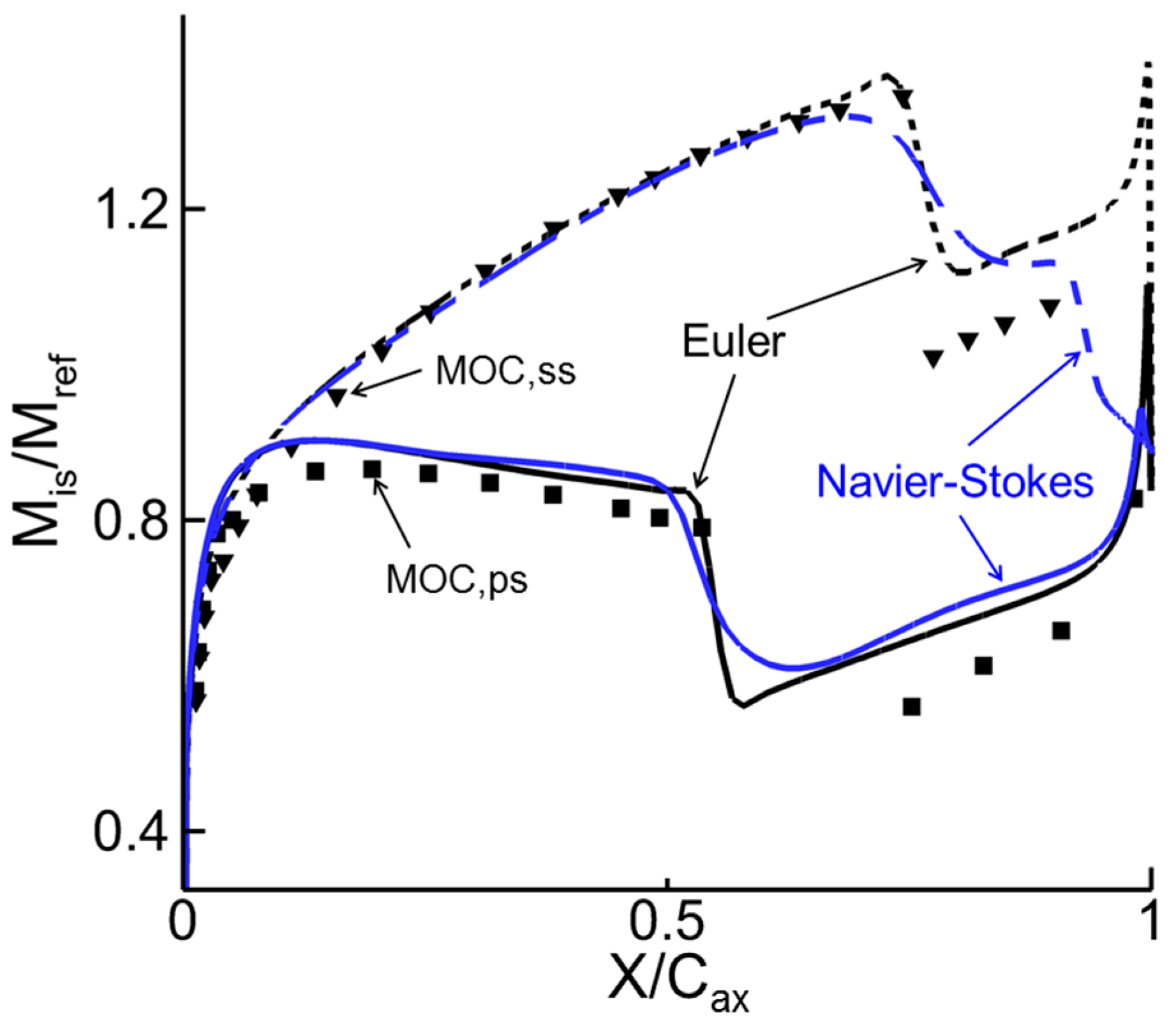
3.3. Assessment of the Method of Characteristics



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P0out/P0in [-] | Mout [-] | Θout [deg.] | Time [s] | |
|---|---|---|---|---|
| Error | +4.7% | +0.6% | 2[deg.] | −99.5% |
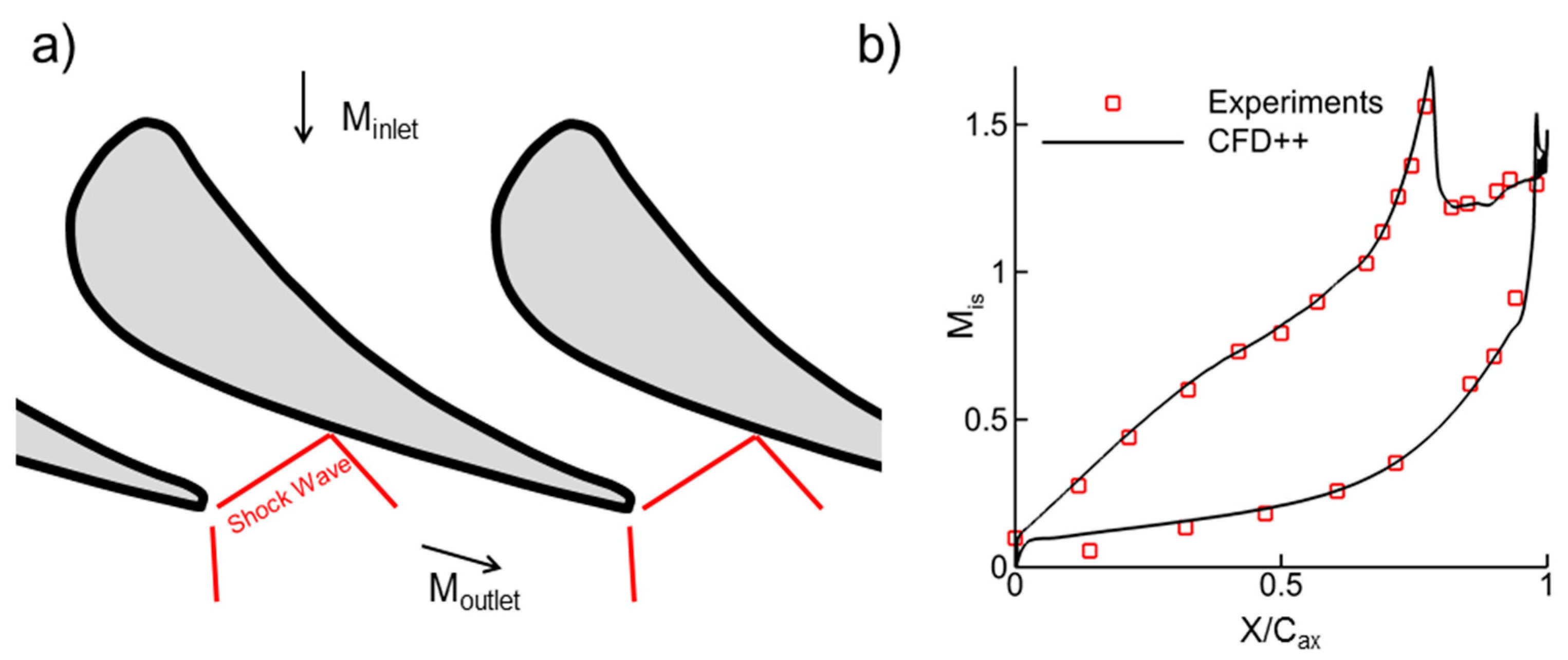
3.4. Numerical Tool Validation

4. Supersonic Design Approach
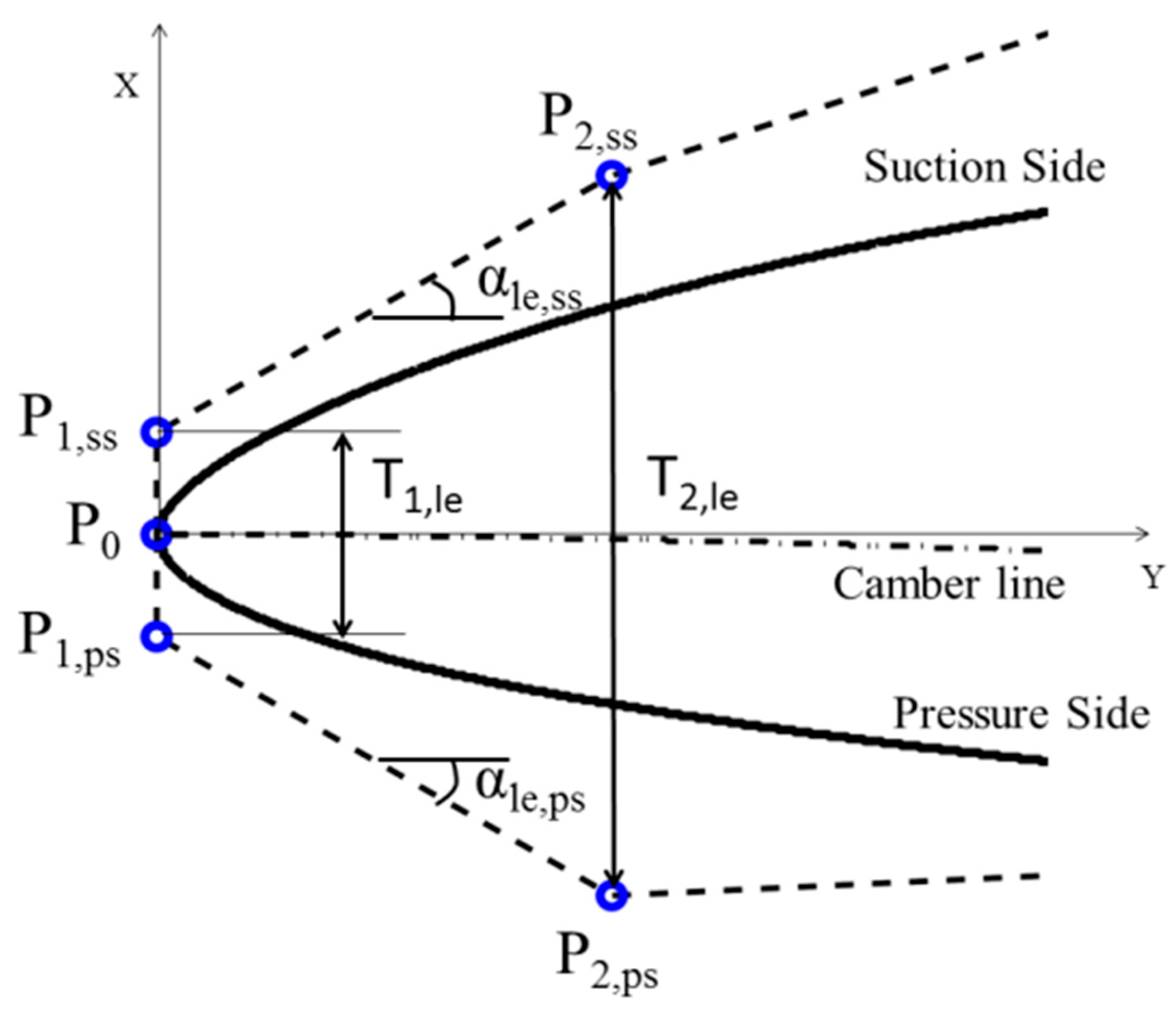
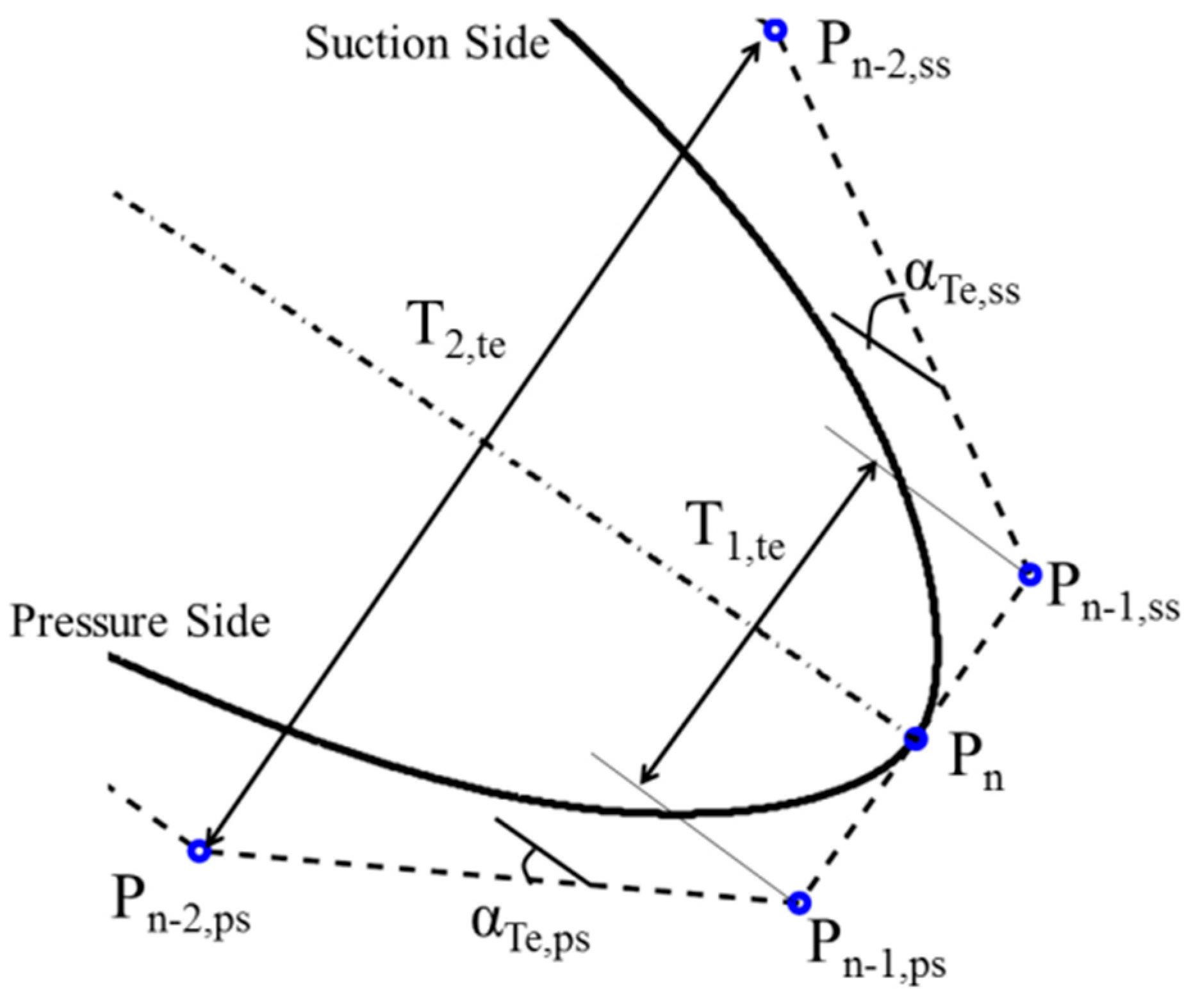
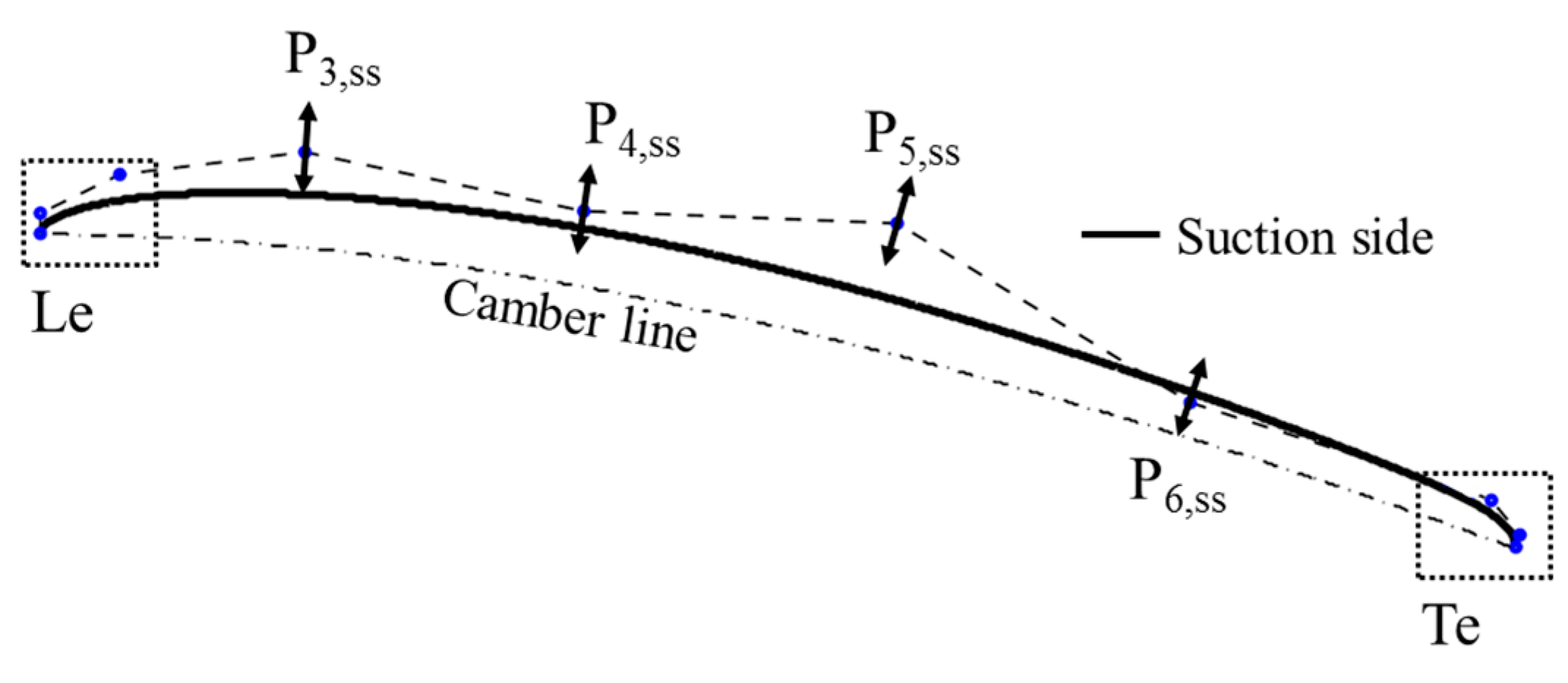
4.1. Geometrical Parameterization
- -
- the leading edge thicknesses (T1,le)
- -
- the second leading edge thickness (T2,le)
- -
- and the wedge leading edge angle (αle)

- -
- the first trailing edge thickness (T1,te)
- -
- the wedge trailing edge angle (αTe)
- -
- the second trailing edge thickness (T2,te)


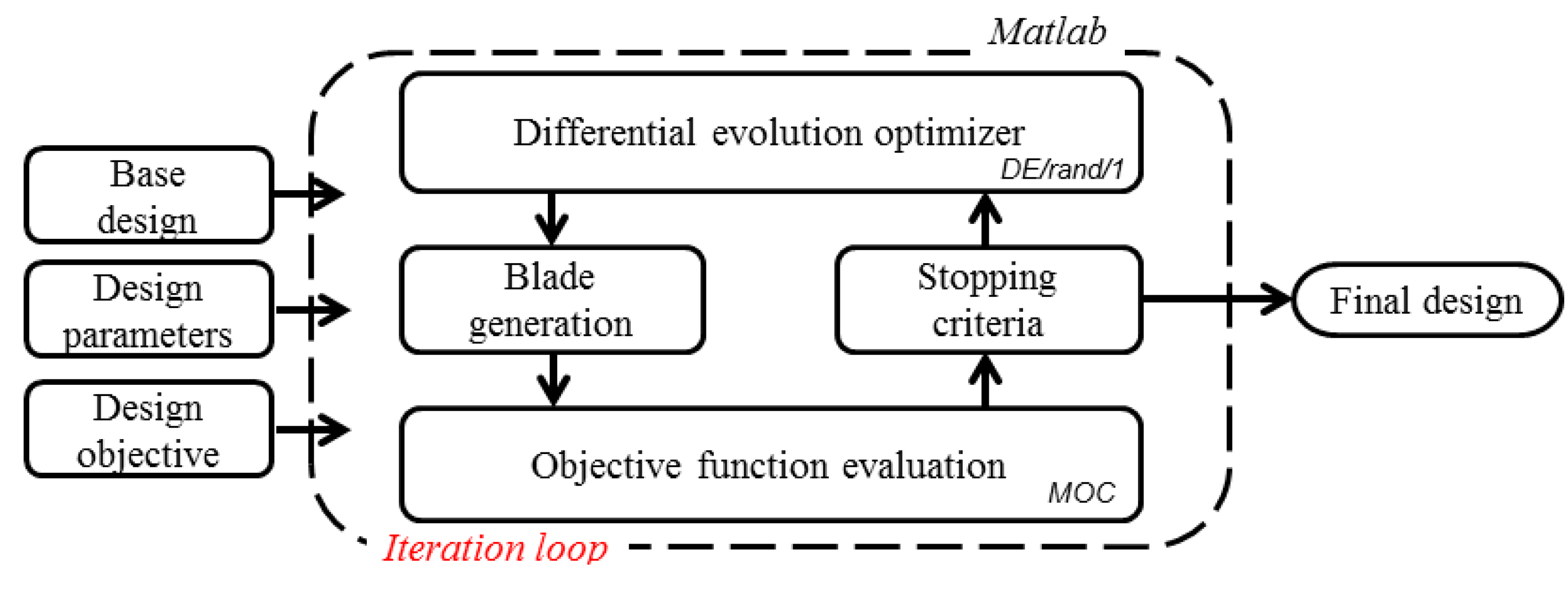
4.2. Optimization Approach

| Parameter | Lower–Upper SS | Upper–Lower PS |
|---|---|---|
| αle [deg.] | 22.5–27.5 | 22.5–27.5 |
| P3 [mm] | 1.04–2.4 | −1.9–6.1 |
| P4 [mm] | 1.29–4.9 | −4.4–3.6 |
| P5 [mm] | 1.6–8.6 | −3.1–4.9 |
| P6 [mm] | −1.8–6.2 | −3.2–4.8 |
5. Results of the Optimization Procedure
5.1. Minimum Losses


| A/g [m] | Imin [m4] | Imax [m4] | αImin [deg.] | |
|---|---|---|---|---|
| Initial | 9.57 × 10−3 | 3.02 × 10−9 | 4.37 × 10−7 | −12.9 |
| Optimized | 8.34 × 10−3 | 1.02 × 10−9 | 3.84 × 10−7 | −13.0 |
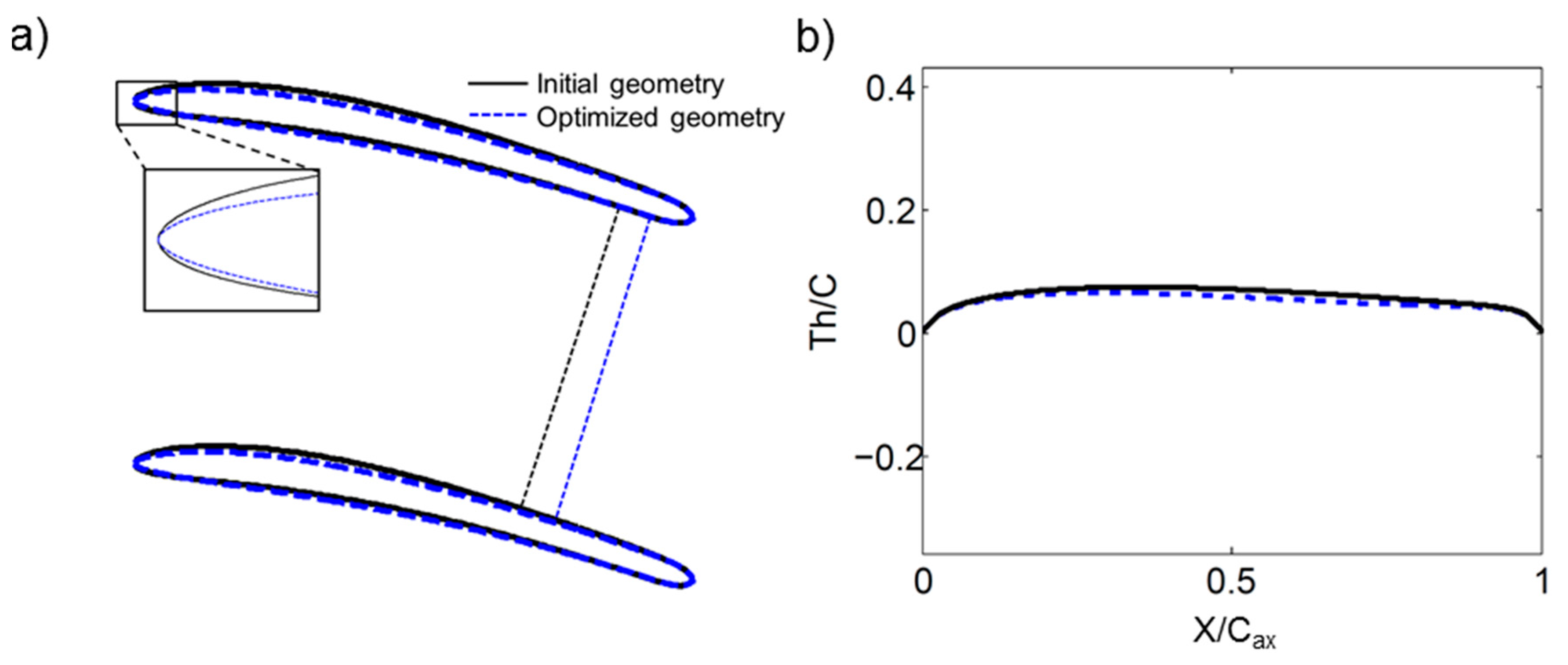
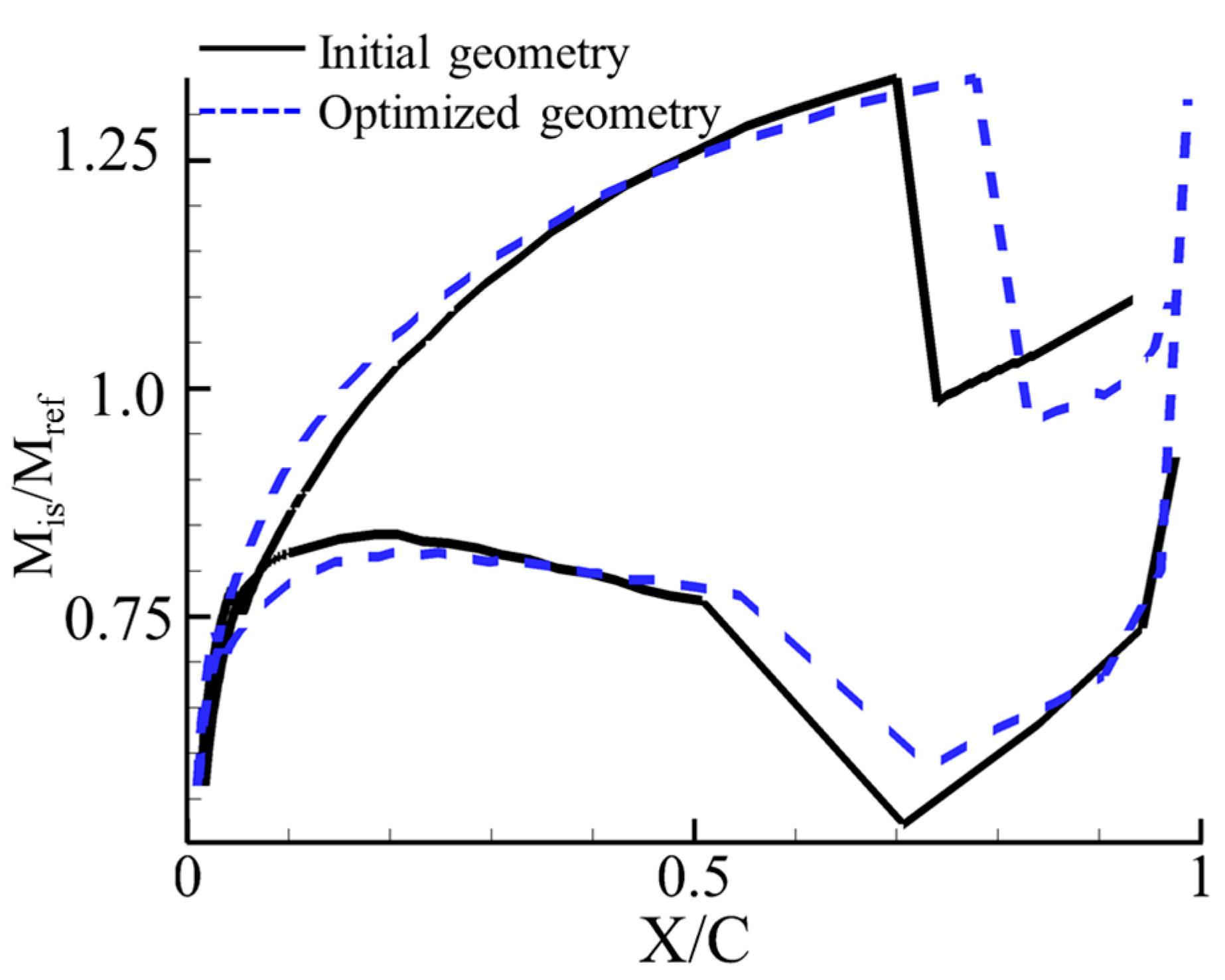
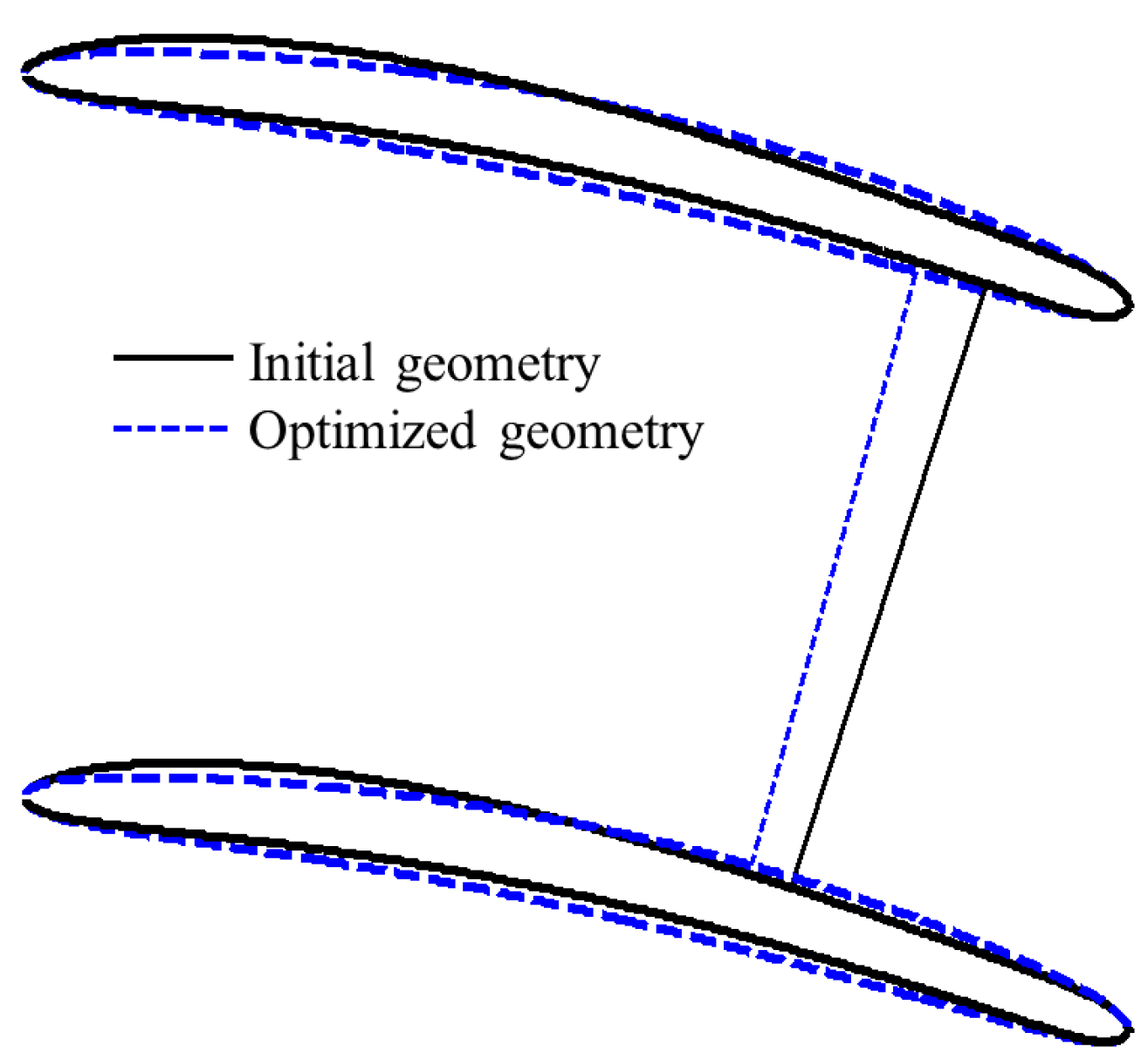
- A higher loading at the leading edge on the optimized geometry due to the greater flow acceleration on the suction side. The smoother acceleration along the pressure side helped to reduce the flow deceleration prior to the shock impact.
- Due to the smaller wedge angle of the leading edge, the shock waves have a higher inclination angle, which directly implies lower losses. As a consequence, the shock impact on the suction and pressure side occurs further downstream (10% of the suction side). Because the Mach number before the shock impingement is detrimental to the intensity of the reflected shock, the optimizer tried to reduce the upstream Mach number by modifying the suction side shape.

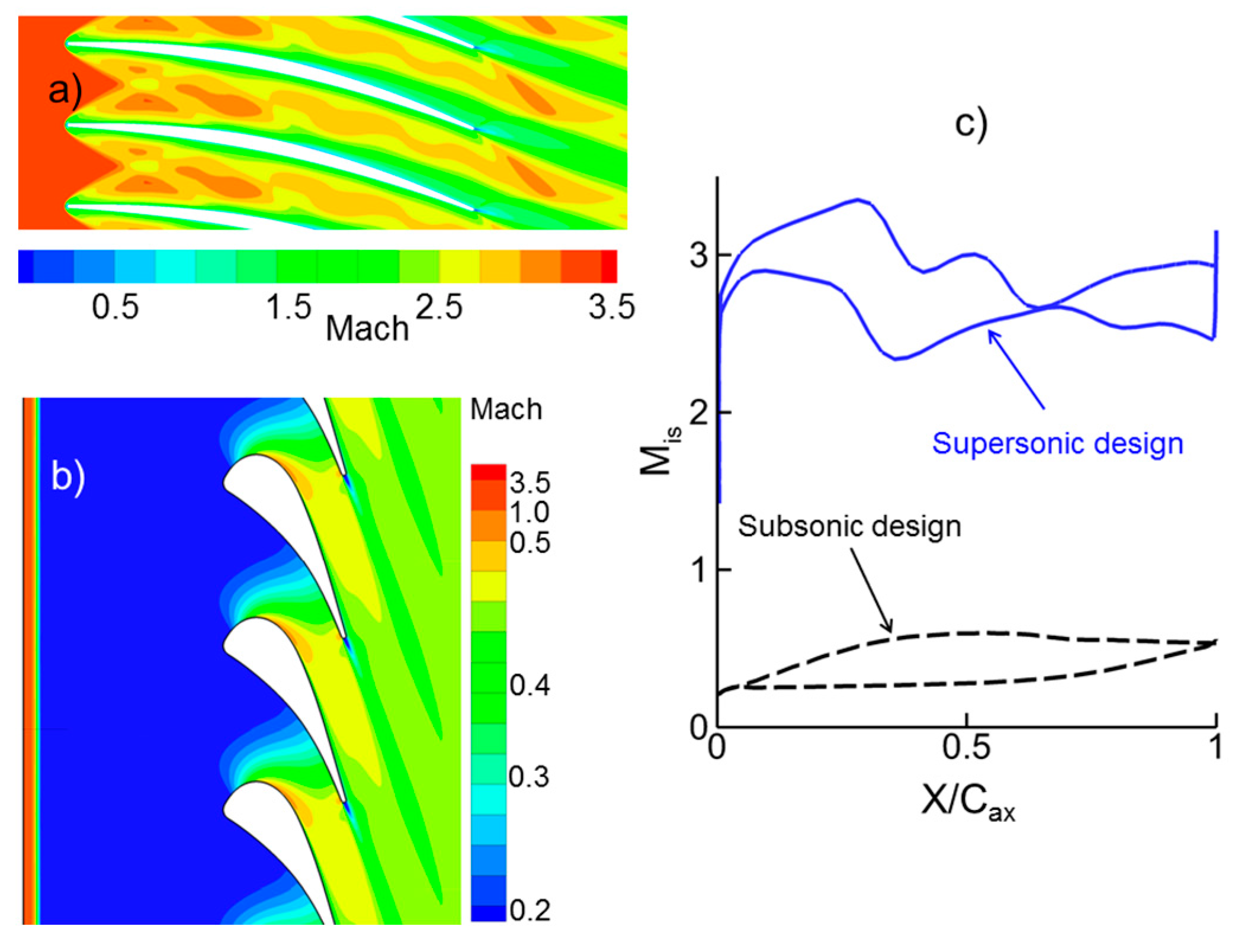
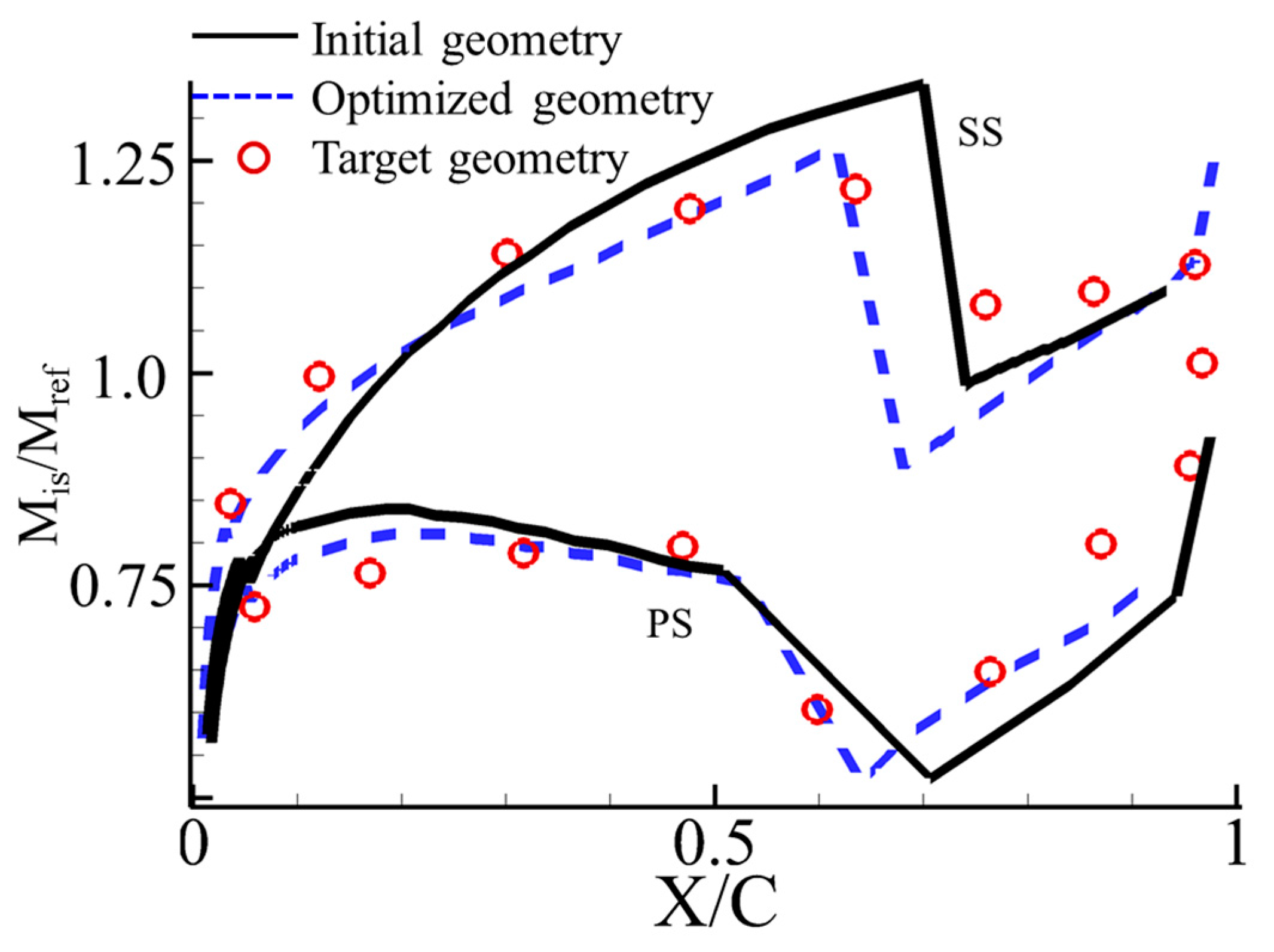
5.2. Imposed Mach Number Distribution


6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| A- | Flow area (m2) | cp- | Specific heat at constant pressure (J/kgK) |
| C- | Characteristic line | g- | Pitch (m) |
| H- | Height of the channel (m2) | u- | Velocity in the x direction (m/s) |
| K- | Compatibility equation | v- | Velocity in the y direction (m/s) |
| M- | Mach number (-) | s- | Entropy (J/kg K) |
| P0- | Total pressure (Pa) | m- | mass flow rate (kg/s) |
| P- | Bezier control point | ν(M)- | Prandtl Meyer expansion (deg.) |
| R- | Specific gas constant (J/kgK) | θ- | Local flow angle (deg.) |
| a- | Sound velocity (m/s) | Φ- | Velocity potential (m/s) |
| Subscript | |||
| + | Right running characteristic | le- | Leading edge |
| − | Left running characteristic | min | Minimum value |
| char- | Characteristics line | max | Maximum value |
| ref- | Inlet Mach number of the test cases | te- | Trailing edge |
| ax | axial direction | out- | Outlet |
| in- | Inlet | ss- | Suction side |
| ps- | Pressure Side | SB- | Sonic point |
| is- | Isentropic value | ||
| Greek Symbols | |||
| α- | Metal angle (deg.) | ||
| αshock- | Shock angle (deg.) | ||
| γ- | Specific heat ratio (-) | ||
| μ- | Mach angle sin−1(1/M) | ||
| Acronyms | |||
| MOC- | Method Of Characteristics | ||
| RANS- | Reynolds Averaged Navier Stokes |
References
- Kantrowitz, A.; Donaldson, C. Preliminary Investigation of Supersonic Diffusers; National Advisory Committee for Aeronautics: Washington, DC, USA, 1945. [Google Scholar]
- Ferri, A. Preliminary Analysis of Axial-flow Compressors Having Supersonic Velocity at the Entrance of the Stator; National Advisory Committee for Aeronautics: Washington, DC, USA, 1949. [Google Scholar]
- Verdonk, G.; Dufournet, T. Development of a Supersonic Steam Turbine with a Single Stage Pressure Ratio of 200 for Generator and Mechanical Drive; Von Karman Institute for Fluid Dynamics: Sint-Genesius-Rode, Belgium, 1987. [Google Scholar]
- Whalen, U. The Aerodynamic Design and Testing of a Supersonic Turbine for Rocket Engine Application. In Proceedings of the 3rd European Conference on Turbomachinery Fluid Dynamics and Thermodynamics, London, UK, 2–5 March 1999.
- Verneau, A. Supersonic Turbines for Organic Fluid Rankine Cycles from 3 to 1300 kw. Von Karman Institute for Fluid Dynamics: Sint-Genesius-Rode, Belgium, 1987. [Google Scholar]
- Binsley, R.; Boynton, J. Aerodynamic Design and Verification of a Two-Stage Turbine with a Supersonic First Stage. J. Eng. Gas Turbines Power 1978, 100, 197–202. [Google Scholar] [CrossRef]
- Tyagi, S.K.; Kaushik, S.C.; Tiwari, V. Ecological Optimization and Parametric Study of an Irreversible Regenerative Modified Brayton Cycle with Isothermal Heat Addition. Entropy 2003, 5, 377–390. [Google Scholar] [CrossRef]
- Jubeh, N.M. Exergy Analysis and Second Law Efficiency of a Regenerative Brayton Cycle with Isothermal Heat Addition. Entropy 2005, 7, 172–187. [Google Scholar] [CrossRef]
- Vecchiarelli, J.; Kawall, J.; Wallace, J. Analysis of a Concept for Increasing the Efficiency of a Brayton Cycle via Isothermal Heat Addition. Int. J. Energy Res. 1997, 21, 113–127. [Google Scholar] [CrossRef]
- Paniagua, G.; Iorio, M.; Vinha, N.; Sousa, J. Design and Analysis of Pioneering High Supersonic Axial Turbines. Int. J. Mech. Sci. 2014, 89, 65–77. [Google Scholar] [CrossRef]
- Moeckel, W. Approximate Method for Predicting form and Location of Detached Shock Waves ahead of Plane or Axially Symmetric Bodies; National Advisory Committee for Aeronautics: Washington, DC, USA, 1949. [Google Scholar]
- Anderson, J.D. Modern Compressible Flow: With Historical Perspective; McGraw Hill Higher Education: New York, NY, USA, 1990. [Google Scholar]
- Paniagua, G.; Yasa, T.; La Loma, A.D.; Castillon, L.; Coton, T. Unsteady Strong Shock Interactions in a Transonic Turbine: Experimental and Numerical Analysis. J. Propuls. Power 2008, 24, 722–731. [Google Scholar] [CrossRef]
- Dvořák, R.; Šafařík, P.; Luxa, M.; Šimurda, D. Optimizing the Tip Section Profiles of a Steam Turbine Blading. In Proceedings of the ASME 2013 Turbine Blade Tip Symposium, Hamburg, Germany, 30 September–3 October 2013; p. V001T01A001.
- Senoo, S. Development of Design Method for Supersonic Turbine Aerofoils near the Tip of Long Blades in Steam Turbines: Part 1—Overall Configuration. In Proceedings of the ASME Turbo Expo 2012: Turbine Technical Conference and Exposition, Copenhagen, Denmark, 11–15 June 2012; pp. 355–365.
- Holland, J. Adaptation in Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Verstraete, T. CADO: A Computer Aided Design and Optimization Tool for Turbomachinery Applications. In Proceedings of the 2nd International Conference on Engineering Optimization, Lisbon, Portugal, 6–9 September 2010; pp. 6–9.
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evolut. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Differential Evolution (DE) for Continuous Function Optimization (an algorithm by Kenneth Price and Rainer Storn). Available online: http://www1.icsi.berkeley.edu/~storn/code.html (accessed on 30 July 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sousa, J.; Paniagua, G. Entropy Minimization Design Approach of Supersonic Internal Passages. Entropy 2015, 17, 5593-5610. https://0-doi-org.brum.beds.ac.uk/10.3390/e17085593
Sousa J, Paniagua G. Entropy Minimization Design Approach of Supersonic Internal Passages. Entropy. 2015; 17(8):5593-5610. https://0-doi-org.brum.beds.ac.uk/10.3390/e17085593
Chicago/Turabian StyleSousa, Jorge, and Guillermo Paniagua. 2015. "Entropy Minimization Design Approach of Supersonic Internal Passages" Entropy 17, no. 8: 5593-5610. https://0-doi-org.brum.beds.ac.uk/10.3390/e17085593