Stability Analysis and Synchronization for a Class of Fractional-Order Neural Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- By utilizing Laplace transform techniques, The boundness and convergence of solution for FONN are investigated.
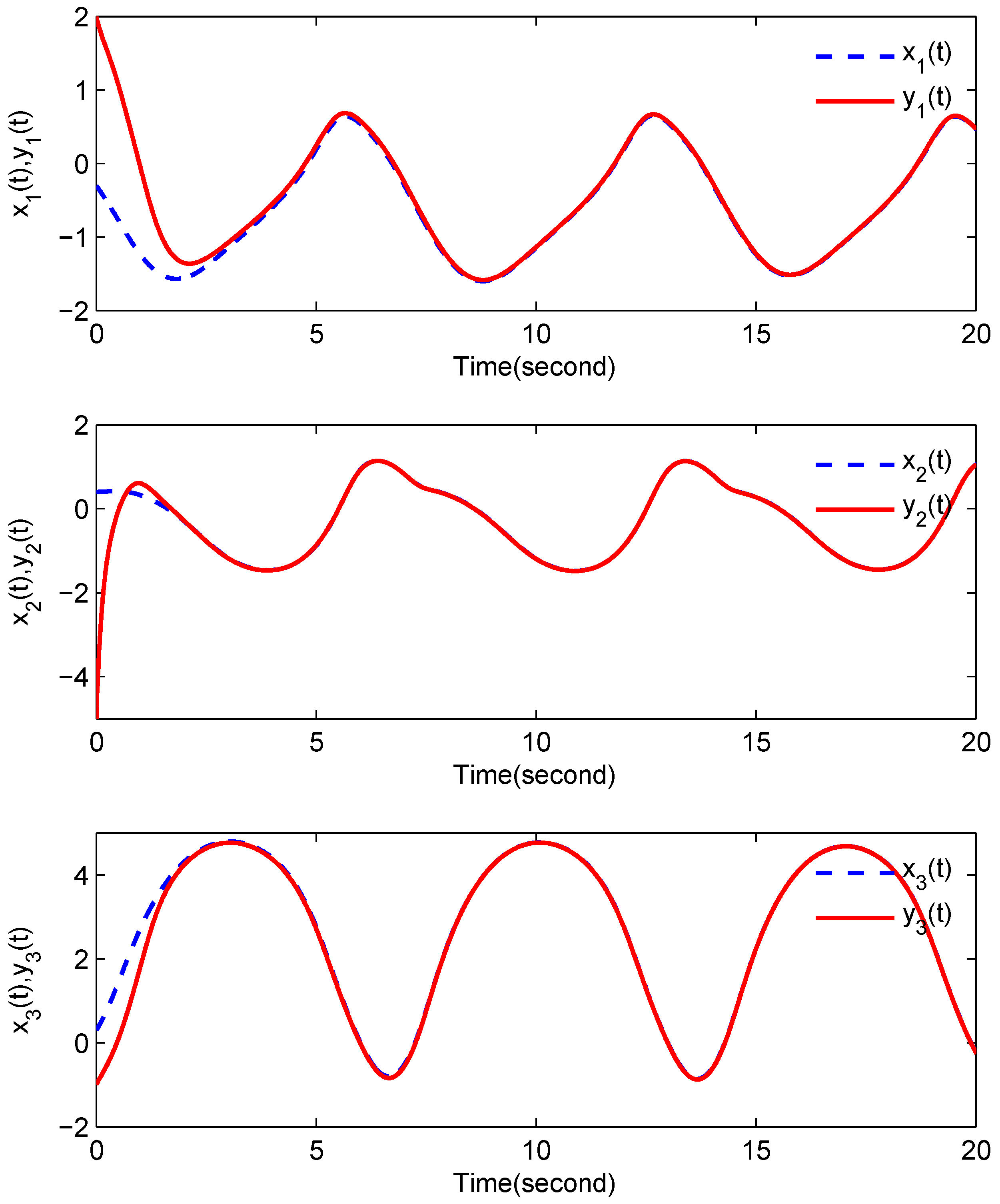
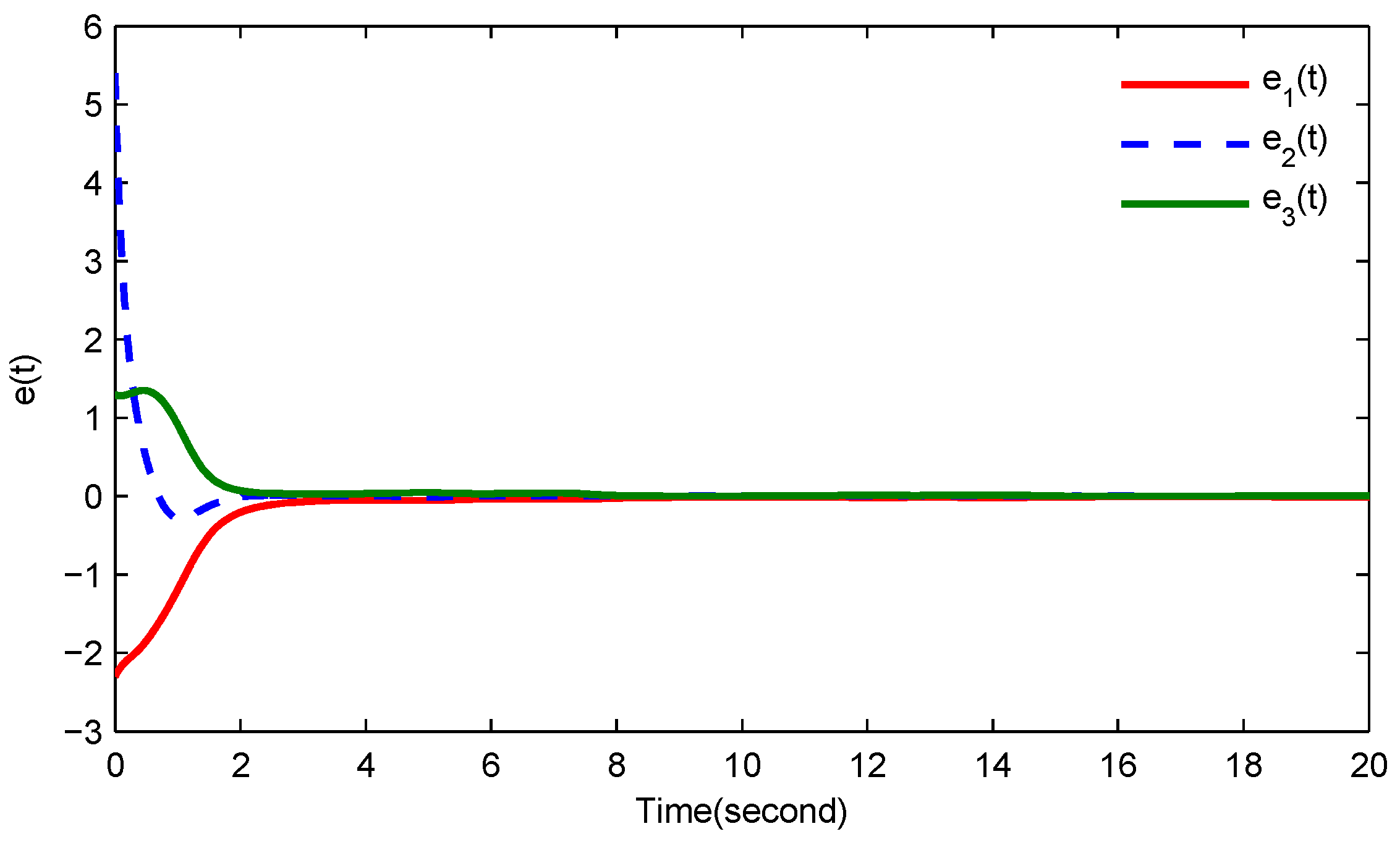
- A linear controller is designed for synchronizing fractional chaotic networks. Integration of the sign function is utilized in our control methods, so chattering phenomenon can be avoided.
- A simple auxiliary function is constructed, which may be helpful for stability analysis of fractional-order systems.
2. Preliminaries
3. Main Results
3.1. System Description
3.2. Stability Analysis
3.3. Synchronization
4. Simulation Results






5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cao, J.; Liang, J. Boundedness and stability for Cohen–Grossberg neural network with time-varying delays. J. Math. Anal. Appl. 2004, 296, 665–685. [Google Scholar] [CrossRef]
- Cao, J.; Wang, J. Global asymptotic and robust stability of recurrent neural networks with time delays. IEEE Trans. Circuits Syst. I Regul. Pap. 2005, 52, 417–426. [Google Scholar]
- Zhang, H.; Wang, Z.; Liu, D. Global asymptotic stability and robust stability of a class of Cohen–Grossberg neural networks with mixed delays. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 56, 616–629. [Google Scholar] [CrossRef]
- Song, C.; Cao, J. Dynamics in fractional-order neural networks. Neurocomputing 2014, 142, 494–498. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Wen, G. Stability analysis of fractional-order hopfield neural networks with time delays. Neural Netw. 2014, 55, 98–109. [Google Scholar] [CrossRef] [PubMed]
- Lazarević, M. Stability and stabilization of fractional order time delay systems. Sci. Tech. Rev. 2011, 61, 31–45. [Google Scholar]
- Liu, H.; Li, S.; Wang, H.; Huo, Y.; Luo, J. Adaptive synchronization for a class of uncertain fractional-order neural networks. Entropy 2015, 17, 7185–7200. [Google Scholar] [CrossRef]
- Anastassiou, G.A. Fractional neural network approximation. Comput. Math. Appl. 2012, 64, 1655–1676. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Sun, Y.; Wang, H. Prescribed performance synchronization for fractional-order chaotic systems. Chin. Phys. B 2015, 24, 153–160. [Google Scholar] [CrossRef]
- Chen, L.; Chai, Y.; Wu, R.; Ma, T.; Zhai, H. Dynamic analysis of a class of fractional-order neural networks with delay. Neurocomputing 2013, 111, 190–194. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Sun, Y.; Wang, H. Adaptive fuzzy synchronization for uncertain fractional-order chaotic systems with unknown non-symmetrical control gain. Acta Phys. Sinaca 2015, 64, 70503. [Google Scholar]
- Kaslik, E.; Sivasundaram, S. Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw. 2012, 32, 245–256. [Google Scholar] [CrossRef] [PubMed]
- Arena, P.; Caponetto, R.; Fortuna, L.; Porto, D. Bifurcation and chaos in noninteger order cellular neural networks. Int. J. Bifurc. Chaos 1998, 8, 1527–1539. [Google Scholar] [CrossRef]
- Huang, X.; Zhao, Z.; Wang, Z.; Li, Y. Chaos and hyperchaos in fractional-order cellular neural networks. Neurocomputing 2012, 94, 13–21. [Google Scholar] [CrossRef]
- Boroomand, A.; Menhaj, M.B. Fractional-order hopfield neural networks. In Advances in Neuro-Information Processing; Springer-Verlag: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Wen, G.; Hu, G.; Yu, W.; Cao, J.; Chen, G. Consensus tracking for higher-order multi-agent systems with switching directed topologies and occasionally missing control inputs. Sys. Control Lett. 2013, 62, 1151–1158. [Google Scholar] [CrossRef]
- Wen, G.; Hu, G.; Yu, W.; Chen, G. Distributed consensus of higher order multiagent systems with switching topologies. IEEE Trans. Circuits Syst. II Express Br. 2014, 61, 359–363. [Google Scholar]
- Chen, L.; Chai, Y.; Wu, R.; Yang, J. Stability and stabilization of a class of nonlinear fractional-order systems with caputo derivative. IEEE Trans. Circuits Syst. II Express Br. 2012, 59, 602–606. [Google Scholar] [CrossRef]
- Ahn, H.S.; Chen, Y. Necessary and sufficient stability condition of fractional-order interval linear systems. Automatica 2008, 44, 2985–2988. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 2014, 50, 547–551. [Google Scholar] [CrossRef]
- Zheng, C.; Li, N.; Cao, J. Matrix measure based stability criteria for high-order neural networks with proportional delay. Neurocomputing 2015, 149, 1149–1154. [Google Scholar] [CrossRef]
- Nie, X.; Zheng, W.; Cao, J. Multistability of memristive Cohen–Grossberg neural networks with non-monotonic piecewise linear activation functions and time-varying delays. Neural Netw. 2015, 71, 27–36. [Google Scholar] [CrossRef] [PubMed]
- Matignon, D. Stability results for fractional differential equations with applications to control processing. Comput. Eng. Syst. Appl. 1996, 2, 963–968. [Google Scholar]
- Farges, C.; Moze, M.; Sabatier, J. Pseudo-state feedback stabilization of commensurate fractional order systems. Automatica 2010, 46, 1730–1734. [Google Scholar] [CrossRef]
- Ren, F.; Cao, F.; Cao, J. Mittag–Leffler stability and generalized Mittag–Leffler stability of fractional-order gene regulatory networks. Neurocompu. 2015, 160, 185–190. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Velmurugan, G.; Cao, J. Stability analysis of fractional-order complex-valued neural networks with time delays. Chaos Solitons Fractals 2015, 78, 297–316. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N.; Sabatier, J.; Oustaloup, A. A lyapunov approach to the stability of fractional differential equations. Signal Process. 2011, 91, 437–445. [Google Scholar] [CrossRef]
- Yu, J.; Hu, C.; Jiang, H. α-stability and α-synchronization for fractional-order neural networks. Neural Netw. 2012, 35, 82–87. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Peng, J.; Gao, J. A comment on α-stability and α-synchronization for fractional-order neural networks. Neural Netw. 2013, 48, 207–208. [Google Scholar]
- Wang, K.; Teng, Z.; Jiang, H. Adaptive synchronization in an array of linearly coupled neural networks with reaction–diffusion terms and time delays. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3866–3875. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, J. Projective synchronization of different chaotic time-delayed neural networks based on integral sliding mode controller. Appl. Math. Comput. 2010, 217, 164–174. [Google Scholar] [CrossRef]
- Yang, X.; Cao, J. Stochastic synchronization of coupled neural networks with intermittent control. Phys. Lett. A 2009, 373, 3259–3272. [Google Scholar] [CrossRef]
- Zhang, G.; Shen, Y.; Wang, L. Global anti-synchronization of a class of chaotic memristive neural networks with time-varying delays. Neural netw. 2013, 46, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Ho, D.; Cao, J. A unified synchronization criterion for impulsive dynamical networks. Automatica 2010, 4, 1215–1221. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional differential equations. Soc. Ind. Appl. Math. 2000, 42, 766–768. [Google Scholar]
- Luo, J.; Li, G.; Liu, H. Linear control of fractional-order financial chaotic systems with input saturation. Discret. Dyn. Nature Soc. 2014. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Liu, H. Stability Analysis and Synchronization for a Class of Fractional-Order Neural Networks. Entropy 2016, 18, 55. https://0-doi-org.brum.beds.ac.uk/10.3390/e18020055
Li G, Liu H. Stability Analysis and Synchronization for a Class of Fractional-Order Neural Networks. Entropy. 2016; 18(2):55. https://0-doi-org.brum.beds.ac.uk/10.3390/e18020055
Chicago/Turabian StyleLi, Guanjun, and Heng Liu. 2016. "Stability Analysis and Synchronization for a Class of Fractional-Order Neural Networks" Entropy 18, no. 2: 55. https://0-doi-org.brum.beds.ac.uk/10.3390/e18020055