
A Memristor-Based Hyperchaotic Complex Lü System and Its Adaptive Complex Generalized Synchronization


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A New MHCLS and Its Properties
2.1. Generation of MHCLS
2.2. Dissipation of MHCLS
2.3. Symmetry and Invariance of MHCLS
2.4. Equilibria and Stability of MHCLS
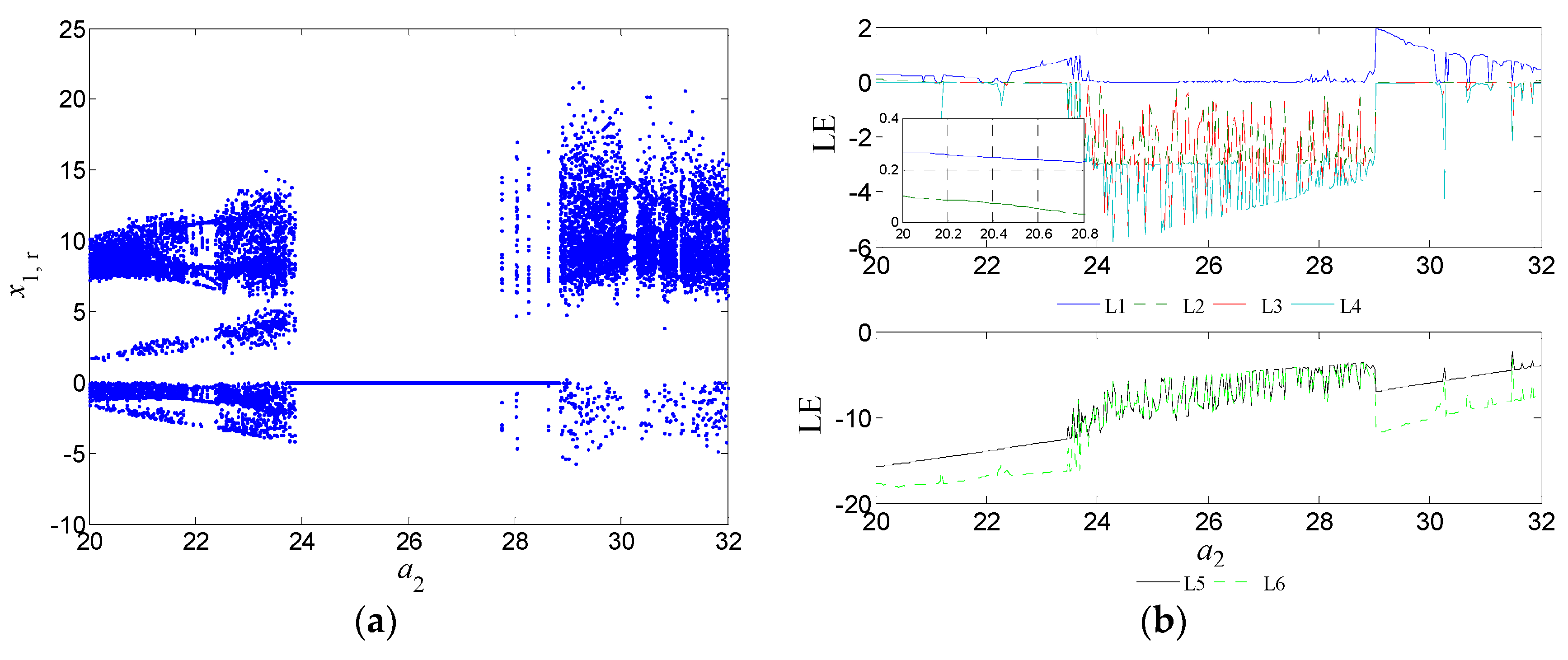
3. Dynamical Behaviors of MHCLS

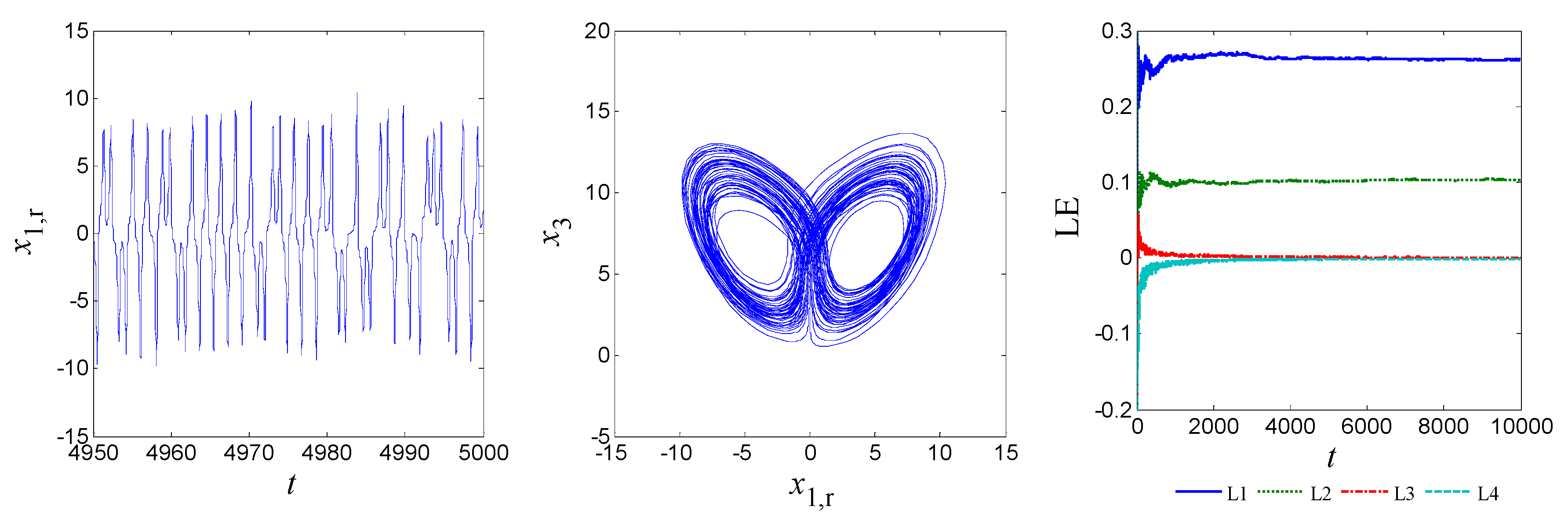
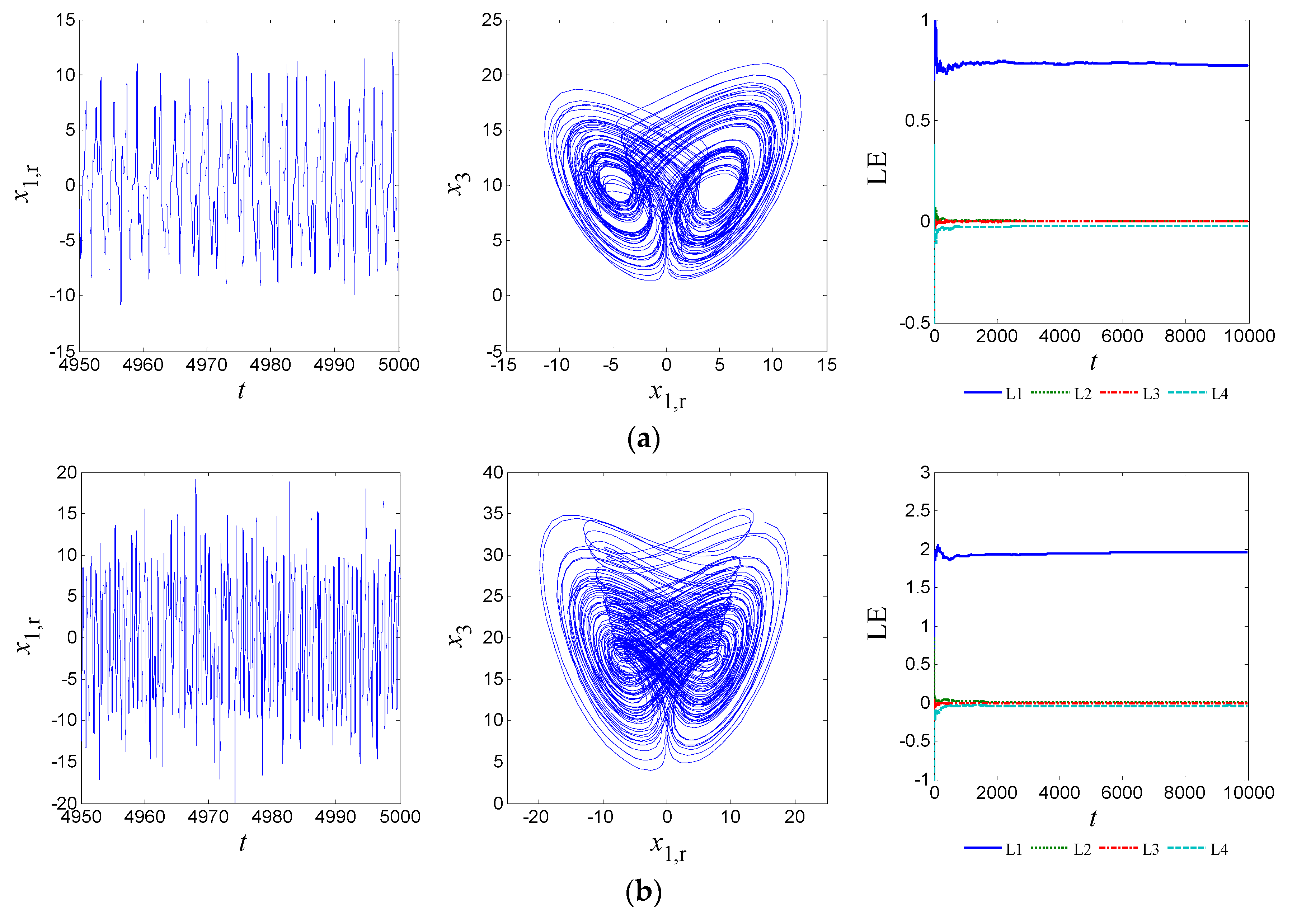
3.1. Hyperchaotic Behavior

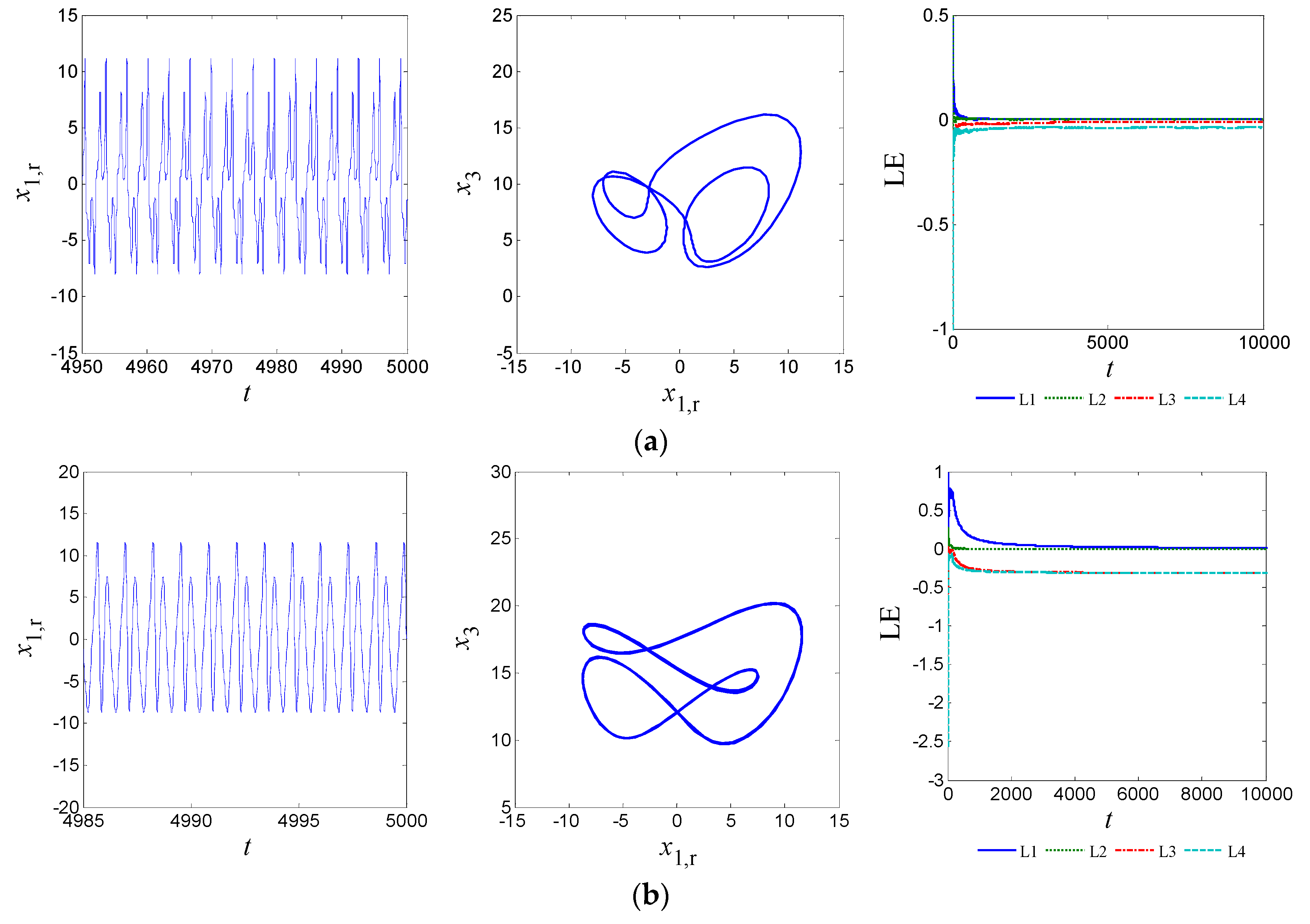
3.2. Chaotic Behavior



3.3. Periodic Behavior
3.4. Transient Behavior
4. ACGS of Two Identical MHCLSs with Unknown Parameters
4.1. Design of ACGS
4.2. ACGS of Two Identical MHCLSs
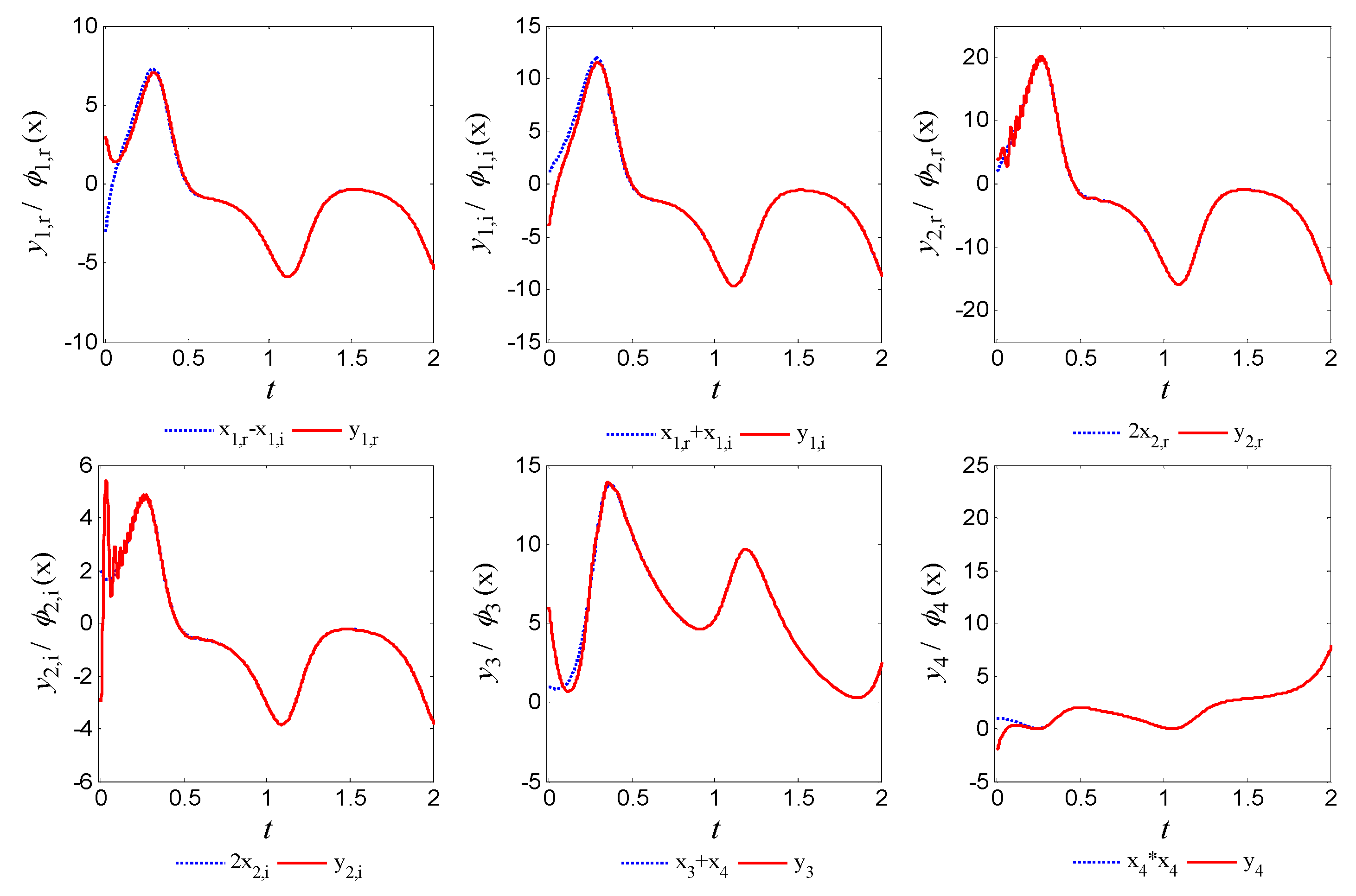
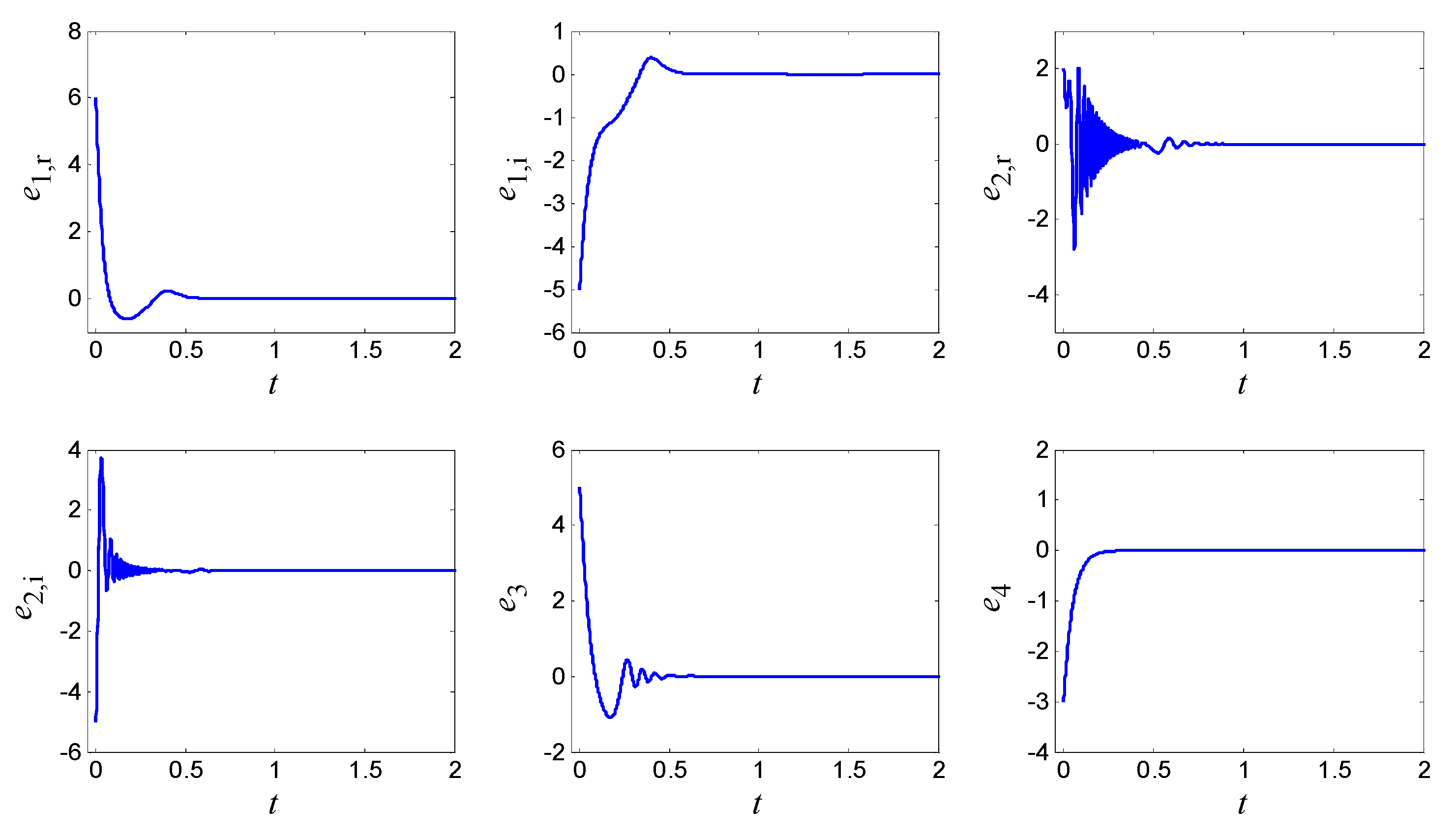
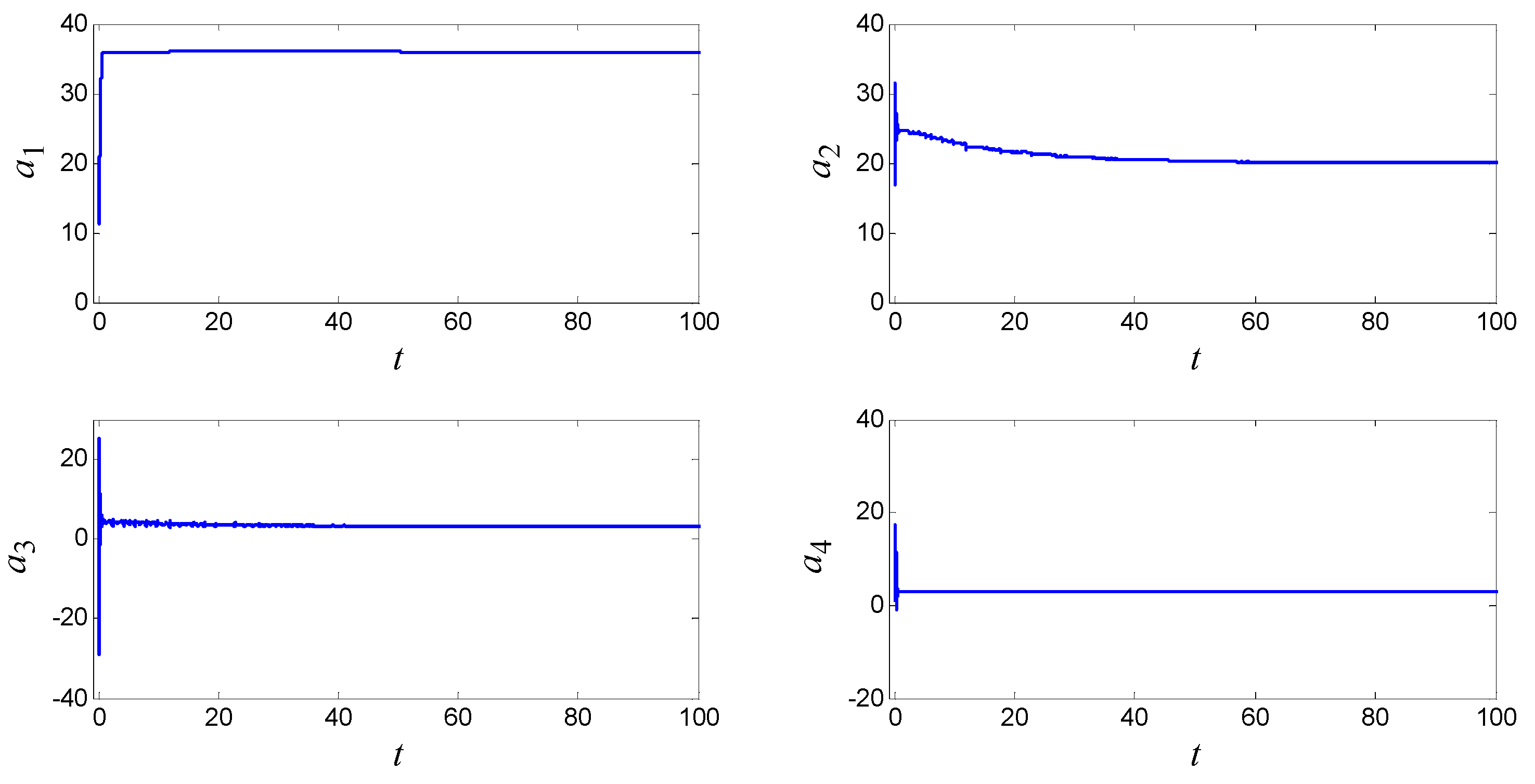
4.3. Numerical Simulations of ACGS



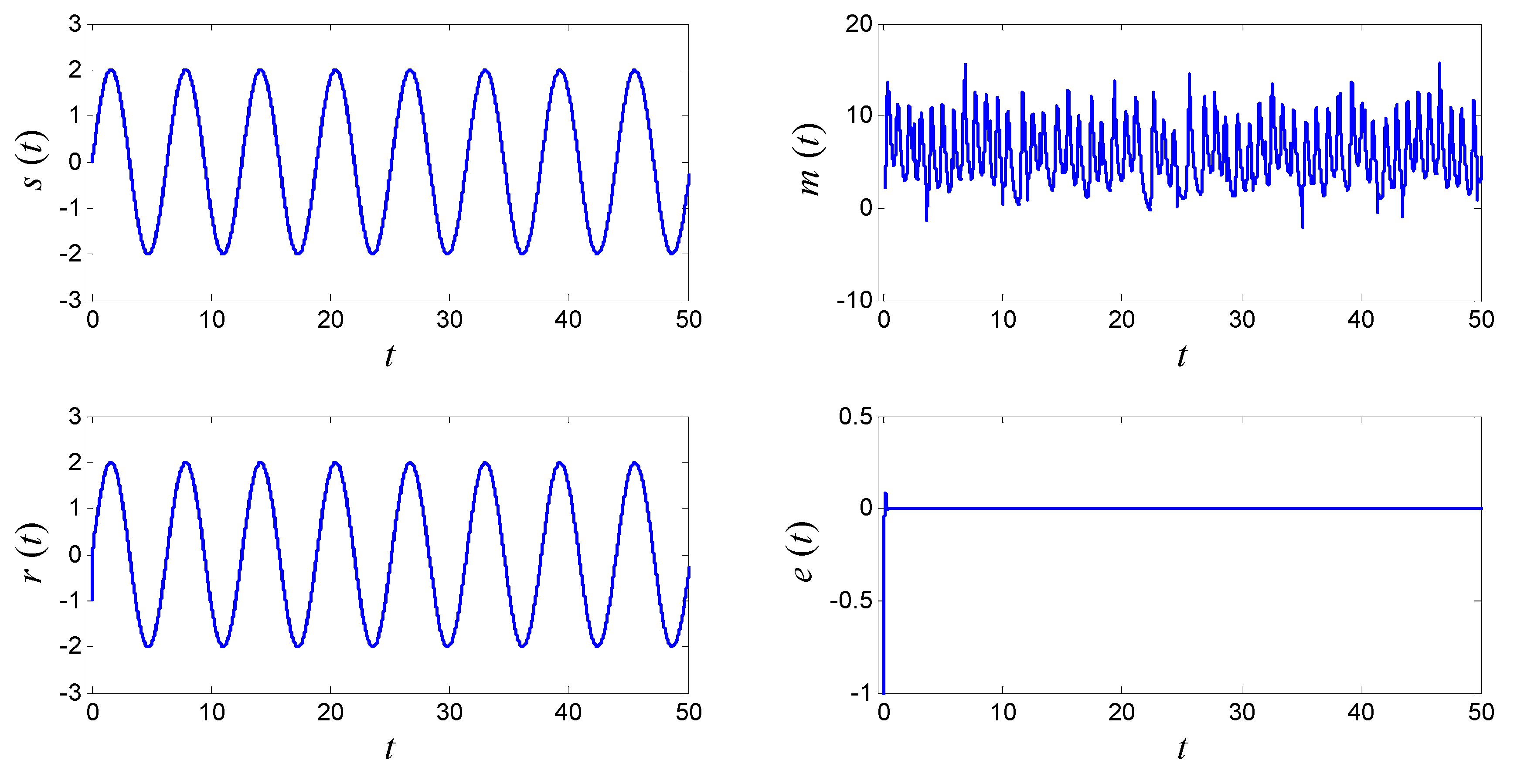
4.4. The Application of ACGS to Secure Communication

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Geisel, T. Chaos, randomness and dimension. Nature 1982, 298, 322–323. [Google Scholar] [CrossRef]
- Chaudhuri, J.R. Chaos and information entropy production. J. Phys. A 2000, 33, 8331–8350. [Google Scholar]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a series. Phys. D 1985, 16, 285–317. [Google Scholar] [CrossRef]
- Rössler, O.E. An equation for hyperchaos. Phys. Lett. A 1979, 71, 155–157. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Chen, G.; Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 1999, 9, 1465–1466. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 2002, 12, 659–661. [Google Scholar] [CrossRef]
- Liu, C.; Liu, T.; Liu, L.; Liu, K. A new chaotic attractor. Chaos Solitons Fractals 2004, 22, 1031–1038. [Google Scholar] [CrossRef]
- Wang, X.; Wang, M. A hyperchaos generated from Lorenz system. Phys. A 2008, 387, 3751–3758. [Google Scholar] [CrossRef]
- Gao, T.; Gu, Q.; Chen, Z. Analysis of the hyper-chaos generated from Chen’s system. Chaos Solitons Fractals 2009, 39, 1849–1855. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, X.; Zheng, Y.; Li, Y. A new modified hyperchaotic Lü system. Phys. A 2006, 371, 260–272. [Google Scholar] [CrossRef]
- Liu, C. A new hyperchaotic dynamical system. Chin. Phys. 2007, 16, 3279–3284. [Google Scholar]
- Chua, L.O. Memristor—The missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Itoh, M.; Chua, L.O. Memristor Oscillators. Int. J. Bifurc. Chaos 2008, 18, 3183–3206. [Google Scholar] [CrossRef]
- Fitch, A.L.; Yu, D.; Iu, H.H.C.; Sreeram, V. Hyperchaos in a memristor-based modified canonical Chua’s circuit. Int. J. Bifurc. Chaos 2012, 22. [Google Scholar] [CrossRef]
- Ishaq Ahamed, A.; Lakshmanan, M. Nonsmooth bifurcations, transient hyperchaos and hyper-chaotic beats in a memristive Murali-Lakshmanan-Chua circuit. Int. J. Bifurc. Chaos 2013, 23. [Google Scholar] [CrossRef]
- Buscarino, A.; Fortuna, L.; Frasca, M.; Gambuzza, L.V. A gallery of chaotic oscillators based on HP memristor. Int. J. Bifurc. Chaos 2013, 23. [Google Scholar] [CrossRef]
- Li, Q.; Zeng, H.; Li, J. Hyperchaos in a 4D memristive circuit with infinitely many stable equilibria. Nonlinear Dyn. 2015, 79, 2295–2308. [Google Scholar] [CrossRef]
- Ma, J.; Chen, Z.; Wang, Z.; Zhang, Q. A four-wing hyper-chaotic attractor generated from a 4-D memristive system with a line equilibrium. Nonlinear Dyn. 2015, 81, 1275–1288. [Google Scholar] [CrossRef]
- Fowler, A.C.; Gibbon, J.D.; Mcguinness, M.J. The complex Lorenz equations. Phys. D 1982, 5, 108–122. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Ahmed, M.E.; Mahmoud, E.E. Analysis of hyperchaotic complex Lorenz systems. Int. J. Mod. Phys. C 2008, 19, 1477–1494. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X.; Zhou, Y. A memristor-based complex Lorenz system and its modified projective synchronization. Entropy 2015, 17, 7628–7644. [Google Scholar] [CrossRef]
- Zhou, X.; Xiong, L.; Cai, W.; Cai, X. Adaptive synchronization and antisynchronization of a hyperchaotic complex Chen system with unknown parameters based on passive control. J. Appl. Math. 2013. [Google Scholar] [CrossRef]
- Luo, C.; Wang, X. Chaos generated from the fractional-order complex Chen system and its application to digital secure communication. Int. J. Mod. Phys. C 2013, 24. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Bountis, T.; AbdEl-Latif, G.M.; Mahmoud, E.E. Chaos synchronization of two different chaotic complex Chen and Lü systems. Nonlinear Dyn. 2009, 55, 43–53. [Google Scholar] [CrossRef]
- Farghaly, A.A.M. Chaos synchronization of complex Rössler system. Appl. Math. Inform. Sci. 2013, 7, 1415–1420. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Aly, S.A.; Farghaly, A.A. On chaos synchronization of a complex two coupled dynamos system. Chaos Solitons Fractals 2007, 33, 178–187. [Google Scholar] [CrossRef]
- Liu, J.; Liu, S.; Zhang, F. A novel Four-Wing hyperchaotic complex system and its complex modified hybrid projective synchronization with different dimensions. Abstr. Appl. Anal. 2014. [Google Scholar] [CrossRef]
- Liu, X.; Hong, L.; Yang, L. Fractional-order complex T system: bifurcations, chaos control, and synchronization. Nonlinear Dyn. 2014, 75, 589–602. [Google Scholar] [CrossRef]
- Muthukumar, P.; Balasubramaniam, P.; Ratnavelu, K. Fast projective synchronization of fractional order chaotic and reverse chaotic systems with its application to an affine cipher using date of birth (DOB). Nonlinear Dyn. 2015, 80, 1883–1897. [Google Scholar] [CrossRef]
- Muthukumar, P.; Balasubramaniam, P.; Ratnavelu, K. Synchronization of a novel fractional order stretch-twist-fold (STF) flow chaotic system and its application to a new authenticated encryption scheme (AES). Nonlinear Dyn. 2014, 77, 1547–1559. [Google Scholar] [CrossRef]
- Zhang, F. Lag synchronization of complex Lorenz system with applications to communication. Entropy 2015, 17, 4974–4985. [Google Scholar] [CrossRef]
- Nian, F.; Wang, X.; Zheng, P. Projective synchronization in chaotic complex system with time delay. Int. J. Mod. Phys. B 2013, 27. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Lin, X. Module-phase synchronization in hyperchaotic complex Lorenz system after modified complex projection. Appl. Math. Comput. 2014, 232, 91–96. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, M.; Huang, Y. Combination synchronization of three identical or different nonlinear complex hyperchaotic systems. Entropy 2013, 15, 3746–3761. [Google Scholar] [CrossRef]
- Mahmoud, M.; Mahmoud, E.E. Modified projective lag synchronization of two nonidentical hyperchaotic complex nonlinear systems. Int. J. Bifurcat. Chaos 2011, 21, 2369–2379. [Google Scholar] [CrossRef]
- Luo, C.; Wang, X. Hybrid modified function projective synchronization of two different dimensional complex nonlinear systems with parameters identification. J. Frankl. Inst. 2013, 350, 2646–2663. [Google Scholar] [CrossRef]
- Sun, J.; Shen, Y.; Zhang, X. Modified projective and modified function projective synchronization of a class of real nonlinear systems and a class of complex nonlinear systems. Nonlinear Dyn. 2014, 78, 1755–1764. [Google Scholar] [CrossRef]
- Liu, J.; Liu, S.; Yuan, C. Adaptive complex modified projective synchronization of complex chaotic (hyperchaotic) systems with uncertain complex parameters. Nonlinear Dyn. 2015, 79, 1035–1047. [Google Scholar] [CrossRef]
- Rulkov, N.F.; Susshchik, M.M.; Tsimring, L.S.; Abarbanel, H.D. Generalized synchronization of chaos in directionally coupled chaotic systems. Phys. Rev. E. 1995, 51, 980–994. [Google Scholar] [CrossRef]
- Li, G. Generalized synchronization of chaos based on suitable separation. Chaos Solitons Fractals 2009, 39, 2056–2062. [Google Scholar] [CrossRef]
- Li, R. Exponential generalized synchronization of uncertain coupled chaotic systems by adaptive control. Commun. Nonlinear Sci. 2009, 14, 2757–2764. [Google Scholar] [CrossRef]
- Muthuswamy, B.; Kokate, P.P. Memristor-based chaotic circuits. IETE Tech. Rev. 2009, 26. [Google Scholar] [CrossRef]
- Bao, B.; Jiang, P.; Wu, H.; Hu, F. Complex transient dynamics in periodically forced memristive Chua’s circuit. Nonlinear Dyn. 2015, 79, 2333–2343. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Wang, X.; Zhou, Y.; Han, B. A Memristor-Based Hyperchaotic Complex Lü System and Its Adaptive Complex Generalized Synchronization. Entropy 2016, 18, 58. https://0-doi-org.brum.beds.ac.uk/10.3390/e18020058
Wang S, Wang X, Zhou Y, Han B. A Memristor-Based Hyperchaotic Complex Lü System and Its Adaptive Complex Generalized Synchronization. Entropy. 2016; 18(2):58. https://0-doi-org.brum.beds.ac.uk/10.3390/e18020058
Chicago/Turabian StyleWang, Shibing, Xingyuan Wang, Yufei Zhou, and Bo Han. 2016. "A Memristor-Based Hyperchaotic Complex Lü System and Its Adaptive Complex Generalized Synchronization" Entropy 18, no. 2: 58. https://0-doi-org.brum.beds.ac.uk/10.3390/e18020058