2D Tsallis Entropy for Image Segmentation Based on Modified Chaotic Bat Algorithm

1
School of Computer Science, Hubei University of Technology, Wuhan 430068, China
2
School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China
*
Author to whom correspondence should be addressed.
Entropy 2018, 20(4), 239; https://0-doi-org.brum.beds.ac.uk/10.3390/e20040239
Submission received: 11 March 2018
/
Revised: 27 March 2018
/
Accepted: 28 March 2018
/
Published: 30 March 2018
(This article belongs to the Special Issue Research Frontier in Chaos Theory and Complex Networks)
Abstract
:Image segmentation is a significant step in image analysis and computer vision. Many entropy based approaches have been presented in this topic; among them, Tsallis entropy is one of the best performing methods. However, 1D Tsallis entropy does not consider make use of the spatial correlation information within the neighborhood results might be ruined by noise. Therefore, 2D Tsallis entropy is proposed to solve the problem, and results are compared with 1D Fisher, 1D maximum entropy, 1D cross entropy, 1D Tsallis entropy, fuzzy entropy, 2D Fisher, 2D maximum entropy and 2D cross entropy. On the other hand, due to the existence of huge computational costs, meta-heuristics algorithms like genetic algorithm (GA), particle swarm optimization (PSO), ant colony optimization algorithm (ACO) and differential evolution algorithm (DE) are used to accelerate the 2D Tsallis entropy thresholding method. In this paper, considering 2D Tsallis entropy as a constrained optimization problem, the optimal thresholds are acquired by maximizing the objective function using a modified chaotic Bat algorithm (MCBA). The proposed algorithm has been tested on some actual and infrared images. The results are compared with that of PSO, GA, ACO and DE and demonstrate that the proposed method outperforms other approaches involved in the paper, which is a feasible and effective option for image segmentation.
1. Introduction
Image analysis and computer vision are core topics in artificial intelligence, which have been deeply studied and obtained a wealth of achievements [1]. Image segmentation is a primary task in image analysis and computer vision. It is a process that partitions the whole image into several regions based on compatibility and dissimilarity existing between the pixels of the input image [2,3]. Thresholding is a commonly used method for carrying out image segmentation based on the different intensities in the foreground and background regions of an image [4,5]. A variety of thresholding methods have been proposed to perform the task of image segmentation [6,7]. Galland et al. [8] utilized Fisher probability density functions for image segmentation. Wei et al. [9] used a novel adaptive thresholding method based on multi-directional gray-scale wave transformation for image segmentation. The image could be regarded as a digital signal with certain probability distribution; as a result, many entropy based thresholding approaches have been put forward, which seek the thresholds that separate the gray-level regions of an image in an optimal manner on the basis of some discriminating criteria such as maximum entropy and cross entropy. Li and Tam [10] presented a minimum cross-entropy thresholding method to obtain the binary image as indicative of preservation of information. Sahoo et al. [11] presented a general technique for thresholding of digital images based on Renyi’s entropy. Tsallis entropy is called non-extensive entropy, which has been studied for a possible extension of Shannon’s entropy to information theory [12,13]. This study has brought a similarity between the Shannon’s entropy and Boltzmann/Gibbs entropy functions [14]. Khader et al. [15] used a multicomponent Jensen–Tsallis similarity measure for nonrigid registration of diffusion tensor images, which had a better performance than the affine registration method based on mutual information. In addition, it is also pointed out in [16] that Jensen–Tsallis divergence is generalizable and symmetric for any optional number of datasets or probability distributions and it has the feasibility of assigning weights to the distributions.
However, entropy-based methods based on 1D histograms do not utilize the spatial correlation information within the neighborhood. When the proportion of the target area is very small, its threshold of the image is very easy to drift or shift. In addition, the segmented result is also easily influenced by noise. Consequently, a group of entropy-based methods based on 2D histograms are proposed to solve the problem. Brink [17] presented an approach that evaluates 2D entropy based on the two-dimensional (local average grey-scale) histogram or scatterplot. Sahoo and Arora [18] presented a common thresholding method based on 2D Renyis entropy. Wu et al. [19] proposed a modified 2D entropy thresholding method, and its fast iterative algorithm.
All of the above 2D entropy thresholding methods can obtain better segmented results than the 1D entropy thresholding method. However, as the number of dimension increases, the computational complexity greatly increases as the number of thresholds increases [20]. Obviously, the alternate solution is to employ computational techniques [21]. Evolutionary computation is a subfield of artificial intelligence that involves continuous optimization and combinatorial optimization problems, which has been previously used to perform 2D entropy-based image segmentation. Abdel-Khalek et al. [22] presented a 2D Tsallis and Renyi entropies method of image segmentation based on genetic algorithm (GA). Zhou et al. [23] proposed a two-dimensional Otsu image segmentation based on a modified firefly algorithm. Soham Sarkar [24] presented a two-dimensional histogram and maximum Tsallis entropy based on differential evolution algorithm (DE) to improve the separation between objects. Jiang et al. [25] suggested combining artificial fish-swarm algorithm (AFSA) and two-dimensional Fisher evaluation function to improve image the threshold segmentation algorithm. Similar to other 2D entropy-based approaches, 2D Tsallis entropy has been used for image segmentation [13], whose efficiency still needs to be improved.
The Bat algorithm (BA) is a population-based random search algorithm that imitates the intelligent behavior of organisms to solve complex problems. Yang has testified its performance on some benchmark functions [26]. However, since its local search scope is too narrow; the convergence speed of the primary BA is slow, which might be improved by some strategies.
Chaos, defined as highly unreliable motion in limited phase space, often appears in deterministic nonlinear dynamic systems, the motion of which is similar to stochastic processes [27]. Taking advantage of its easy implementation and extensive local search scope, any variable in the chaotic space can travel periodically over the whole space of interest. Feng et al. [28] presented the application of appropriate chaotic map and Gaussian perturbation can significantly improve the overall performance and the solution quality of the algorithm. Nowadays, the chaotic process has been widely used in evolutionary computational techniques [29,30]. Adarsh et al. [31] proposed solving the economic dispatch problem involving a number of equality and inequality constraints such as prohibited operating zones and power balance. Suresh [32] proposed a modified variant of Darwinian particle swarm optimization algorithm based on Chaotic functions. Wang [33] proposed a band selection method based on chaotic binary coded gravitational search algorithm to reduce the dimensionality of airborne hyperspectral images. Mlakar et al. [34] proved that the chaotic maps method in differential evolution (DE) applied to gray-level image thresholding prevails over the traditional randomized method. Wang et al. [35] proposed the novel chaotic cuckoo search optimization, which has turned out to be a meta-heuristic algorithm with comparable and superior performance. Wang et al. [36] improved the solution quality and convergence speed using chaotic maps in the cuckoo search (CS) algorithm. Zhang et al. [37] proposed a hybrid chaotic ant swarm algorithm, which performs better in the application of the heat exchanger networks synthesis. Oliva et al. [38] proposed the chaotic whale optimization algorithm for the parameter estimation of photovoltaic cells, which proves that chaotic maps can enhance computing ability and mechanically adapt the internal parameters of the optimization algorithm. Koupaei et al. [39] proposed a new algorithm to solve nonlinear optimization problems by combining chaotic mapping capability and a gold segmentation search method that has been proved to be an effective and efficient optimization algorithm.
Levy flight is a way to forage for random walks existing among animals, the walking steps of which satisfied a heavy tail distribution. It is also an ideal foraging search for exploring short distances and occasionally long walks. Therefore, it is widely utilized to improve the optimization algorithm [40]. Yan et al. [41] developed the particle swarm optimization (PSO) algorithm by combining the characteristics of random learning mechanism and Levy flight. Jensi et al. [42] improved PSO with Levy flight for the global optimization. Heidari [43] modified the grey wolf optimizer with Levy flight for optimization tasks.
In this paper, a modified chaotic Bat algorithm (MCBA) is used to perform the 2D Tsallis entropy based method for image segmentation. In addition, the performance of the proposed method is compared with some previously presented 1D and 2D histogram based image segmentation methods, and a traditional Bat algorithm based 2D Tsallis entropy method. The experimental results display that the proposed method outperforms the other approaches from the subjective and objective viewpoints.
The remainder of the paper will be structured as below: Section 2 introduces image thresholding based on Tsallis entropy. Section 3 describes the modified chaotic Bat Algorithm in brief. Section 4 presents the fundamental viewpoint of MCBA-based 2D Tsallis entropy thresholding method. In Section 5, simulation results and discussion are displayed. Finally, conclusions are drawn in Section 6.
2. Image Thresholding Based on Tsallis Entropy
2.1. Definition of 1D Tsallis Entropy
In information theory, entropy is the measurement of the indeterminacy in a random variable [44]. The term mostly refers to the Shannon entropy in this case. Shannon entropy quantifies the expected value of the information that is comprised in a message, and it is the average unpredictability in a random variable equal to its information content. The most commonly used Shannon entropy was defined as Equation (1):
By following the multi-fractal concepts, Tsallis entropy is an extension of the standard Boltzmann/Gibbs entropy. In 1988, Constantino Tsallis utilized it as a support for generalizing the standard statistical mechanics [45], which could be applied to a non-extensive system in view of a general entropic formula as Equation (2):
where n indicates total times of the system and q is the measure of degree of non-extensivity of the system called Tsallis parameter or even entropic index. Different values of the parameter q have an effect on the image segmentation result [46]. When the whole system consists of two independent subsystems A and B, this entropic form can be extended for a statistical independent system by a pseudo-additive entropic rule as Equation (3):
2.2. 2D Histogram
Assume that the size of a digital image is , and indicates the gray value of the pixel located at the point . represents the average gray value of the pixel located at the point in the adjacent field of (k is usually set as 3) [47]. The average gray value for the neighborhood of each pixel is calculated as Equation (4):
The pixel’ s gray value , and the average of its neighborhood , are utilized to construct a 2D histogram as Equation (5):
where indicates the size of test image, represents the pixel number of which the gray value is i, and the average gray value in the neighborhood is j. indicates the 2D histogram function of test image. L is the maximum gray values of the test images. In our test images, L is 255.
The threshold is obtained through a vector where t indicates the threshold of the gray level and s indicates the threshold of the average gray level in the neighborhood. Using the 2D histogram function , a surface can be described that will have two peaks and one valley. The object and background correspond to the peaks and can be divided by selecting the vector that maximizes a appropriate standard function. Using this vector , the domain of the histogram is separated into four quadrants, shown in Figure 1.
It is indicated that the area A by , the area B by , the area C by , and the area D by . Since two areas, C and D, contain noise and inessential information, they are ignored in the calculation. Owing to the areas A and B containing the object and the background, they are independently distributed, normalizing their probability values in each case so that the total probability of each region is 1. The normalization is completed by utilizing a posteriori class probabilities, and are defined as Equation (6):
where the contribution of the areas that comprises the edges and noise information can be ignored; hence, is approximately equal to .
2.3. Definition of 2D Tsallis Entropy
Assume that the test image can be segmented as two independent parts: object sets O and background sets B, the 2D Tsallis entropy interrelated with object and background sets are defined by Equations (7) and (8):
Consequently, the definition of 2D Tsallis entropy of the whole image is as Equation (9):
Three different entropies can be defined by different values of q. For , the Tsallis entropy becomes a subextensive entropy, where ; for , the Tsallis entropy reduces to an standard extensive entropy, where ; for , the Tsallis entropy becomes a superextensive entropy, where [48]. The paper mainly focused on enhancing efficiency of 2D Tsallis entropy thresholding; therefore, q is set as a constant value, that is .
In order to obtain the optimal segmentation threshold , the objective function is defined to maximum the above criterion function as Equation (10):
3. The Modified Chaotic Bat Algorithm
Nowadays, meta-heuristic algorithms are becoming an efficient way for solving tough optimization problems [49]. For the most part, meta-heuristic algorithms make few or no assumptions about the optimization problem to be solved and are able to make an extensive search in candidate spaces. Behaviors of physical systems or biological systems in nature have bred most heuristic and meta-heuristic algorithms, such as ant colony optimization algorithm (ACO) algorithm, PSO and simulated annealing. In 2010, Xin-She Yang developed a novel bat inspired meta-heuristic optimization algorithm [50]. Owing to the initialization process being random and the generated sequences not being distributed uniformly, the experimental results on the benchmark function show that the basic Bat algorithm can easily fall into local optimum [31]. The chaotic Bat algorithm (CBA) is a very efficient method for solving the optimization problem. However, for the evolutionary algorithm, due to the chaotic process, is usually taken after each iteration is completed. In the traditional Bat algorithm, a random walk is used to make a local search, and the chaotic process largely extends the search space of the whole algorithm. The previous local search will be out of action, and the convergence rate of the algorithm is also significantly reduced. On the other hand, the local search ability is mainly influenced by the parameter ; is a manually set parameter in the initialization step and cannot be changed during the whole iterative processes. that is too big or too small will all lead to a case that the algorithm can not obtain the optimal solution. Levy flight was proposed as a local search strategy by Yang and Deb in 2009 [51]. They found that the random walk style search performed better through Levy flights rather than a simple random walk, which is more efficient in searching the solve space, and its step length is much longer in the long run. More importantly, Levy flight does not need to set any parameters. All of these advantages make Levy flight have better local search ability.
3.1. Overview of the Basic Bat Algorithm
The Bat algorithm (BA) is inspired by ultrasonic detection behavior of bats, in which virtual bats are deemed as search agents to find the optimal solution for practical problems. Simulating bats to detect prey and avoid obstacles, the basic mathematical model of the Bat algorithm could be defined as follows:
Assume that virtual bats fly randomly with velocity at position and go hunting with a settled frequency of , variable wavelength and loudness . The bats are able to automatically alter the wavelength and the pulse emission rate on the basis of the distance from the targets. The loudness varies from a maximum value to a minimum value , which both are constants. In addition, and the plus rate ranges in Bat algorithm is between 0 and 1, where 1 means the maximum rate of pulse emission and 0 stands for no pulse.
3.1.1. Movement of Virtual Bats
Rules that update new solutions and velocities at time step t in a multi-dimensioned search space are defined as Equations (11)–(13) [52,53]:
where is a random vector in and and are on behalf of the new solutions and the velocities value in time step t, respectively. In Equation (12), denotes the current global optimal solution in all solutions engendered by n bats. Here, parameter is utilized to adjust the velocity change while fixing the wavelength , depending on the form of the problem of interest, which is randomly generated in the range of .
For the sake of fine search, the local search operation of the Bat algorithm has been designed as Equation (14):
where is a random number, and the average loudness of all bats are represented by at time step t.
3.1.2. Loudness and Pulse Emission
As the algorithm is executed, loudness and rate requires to be renewed according to the time step t. In the hunting process, once the prey is captured by the bat, will get decreased while will get increased. Usually, might be fit with any effective value:
In Equation (15), and are usually set as constants. For any and in the range of and , we have Equation (16) as below:
Generally, is set equal to . Parameters needs to be fine-tuned from experiments.
3.2. Chaotic Process
Chaos is an irregular nonlinear phenomenon in nature, which is defined as the highly unstable unpredictable motion of deterministic systems in restricted phase space. Yang et al. [53] proposed chaotic optimization algorithms for global optimization that utilized chaotic variables instead of random variables. In these algorithms, due to the non-repetition and ergodicity of chaos, they can achieve an overall search at a higher speed than probabilistic random searches. Accordingly, a nonlinear system is said to be chaotic if it exhibits sensitive dependence on initial conditions, which is generally exhibited by systems containing multiple elements with nonlinear interactions, and has an infinite number of different periodic responses [54]. Additionally, complex systems as well as some logistic equations are utilized to generate chaotic sets. In addition, some of the well-known chaotic maps, as illustrated from Equations (17) to (27), are as below:
- Logistic map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, .
- Sine map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, .
- Sinusoidual map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, .
- Singer map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, .
- Sinus map:where denotes the value of the chaotic variable x at the n-th iteration, .
- Chebyshev map:where denotes the value of the chaotic variable x at the n-th iteration, , and k is the degree parameter, .
- Circle map:where denotes the value of the chaotic variable x at the n-th iteration, , while and are the control parameters; here, , .
- Dyadic map:where denotes the value of the chaotic variable x at the n-th iteration, .
- Gaussian map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, which can be set as arbitrary constant.
- Iterative map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, .
- Tent map:where denotes the value of the chaotic variable x at the n-th iteration, , and is the bifurcation parameter, .
3.3. Levy Flight
Levy flight is a Markov chain process, which is different from regular Brownian motion that the lengths of individual jumps are distributed with the probability density function. Various research indicates that the flight behaviour of many organisms has demonstrated the typical characteristics of Levy flights [55]. Rhee et al. [56] has shown that fruit flies explore their landscape through a series of straight flight paths punctuated by a abrupt turn, which leads to a Levy-flight-style intermittent scale free search pattern. To generate a new solution , Levy flight can be defined as Equation (28):
where denotes the new solution relying on the current location and the transition probability. The product ⊕ means entry-wise multiplications. is the step size that needs to be connected with the search space—in most cases, , for controlling the step size. This entry-wise product is similar to those employed in PSO, and the random walk by Levy flight is more efficient to explore the searching space, and it has a much longer step length in the long term.
In essence, Levy flight provides a random walk while the random step length is drawn from a Levy distribution, which has an infinite variance with an infinite mean as Equation (29):
In Equation (29), the consecutive steps of a bat are from a random walk process that obeys a power law step-length distribution with a heavy tail. Some of the new solutions should be produced via Levy flight round the optimal solution acquired by far; this will speed up the local search.
The main idea of MCBA is that, after updating the velocity vector and position vector , the chaotic process is utilized to make a random search for each bats, and, finally, the local search strategy by using Levy flight is adopted for the best solutions in the current generation to quickly obtain the optimal solution.
4. The Proposed Methodology
In this paper, a modified chaotic Bat algorithm (MCBA) is proposed to complete the task of image segmentation. MCBA is employed to search the optimal threshold values, which is used for image segmentation. Here, the algorithm is utilized to search the best thresholding pair through maximizing the 2D Tsallis entropy. The initialization of the bat population is generated with n number of solutions, each of which is a D-dimension vector. For each solution representing 2D candidate threshold, D is set to 2. denotes the i-th bat position in the population, which indicates a candidate threshold pair and its fitness will be measured by 2D Tsallis function. The basic procedures of image segmentation by using MCBA-based 2D Tsallis entropy algorithm can be depicted as follows:
- Input:
- The set of generated position vectors as the parameters t, s.
- Output:
- The final segmented image with selected thresholds based on the optimal parameters.
- Step 1:
- InitializationSet the control parameter value. Initialize velocity vectors , pulse rates and the loudness . Define pulse frequency at , iterations of MCBA .
- Step 2:
- Calculate the fitness valueCompute the value of objective function using Equation (9).
- Step 3:
- Reproduction loopReproduction loop:
- Step 4:
- Movement of virtual bats
- 4.1:
- Generate new solutions by adjusting frequency, and update velocities and locations/solutions by using Equations (11)–(13).
- 4.2:
- Make a chaotic process by using one of Equations (17)–(27).
- 4.3:
- Compute the value of objective function using Equation (9).
- 4.4:
- Make a local search by Levy flight using Equation (28).
- Step 5:
- Loudness and pulse emissionIfAccept the new solutions.Increase and reduce by using Equations (15) and (16).
- Step 6:
- Update the current best parametersRank the bats and find the current best .
- Step 7:
- End of the algorithmIf (k < )go to Step 3.Elseoutput the segmented image based on the optimal parameters.
According to the operational process of meta-heuristic algorithm, the computational results of the Bat algorithm depend on parameters setting in some extent; fine tuning of the parameters setting can produce a better result. Among them, Table 1 show the parameters used in the Bat algorithm.
5. Simulation Results and Discussion
In order to evaluate the performance of the algorithms on the actual images accurately and effectively, the proposed algorithm and some classical optimization algorithms will be tested on a set of images. In the first part, some natural images are utilized for testing the mentioned algorithms, the objects, foreground and background of which can be accurately separated by suitable thresholds. In addition, some infrared target images were selected in this paper, which are obtained by measuring the heat radiated from the object, which can resolve the consistency judgment of the same target and distinguish the objects by gray levels.
In this section, for the sake of showing the advantages of the proposed method, five nature images respectively named “AIRPORT”, “PLANE”, “BIRD”, “SKIMAN”, “MRI” and five infrared images respectively named “SHIP”, “FIELD”, “TARGET”, “PISTOL”, “PERSON” are used to evaluate the segmentation technique based on the MCBA-based 2D Tsallis entropy algorithm. We present some contrastive experimental results, including illustrative examples and performance evaluating tables, which clearly demonstrate the advantages of the proposed method. To make purposeful yet effective comparison for the optimization ability, the results of MCBA are respectively compared with GA, PSO, ACO, DE, and BA. All the test images are classified as two different categories; all the algorithms are evaluated by using Equation (10) as the objective function. Table 2, Table 3, Table 4 and Table 5 show the parameters setting of GA, PSO, ACO and DE, and results are put in Table 6, which include average and variance of the fitness value by 50 independent runs for each algorithm. The MATLAB code to generate these thresholds is available as Supplementary Material.
Furthermore, to make purposeful yet effective comparison for the segmentation ability, results of the proposed method are respectively compared with 1D Fisher, 1D maximum entropy, 1D cross entropy, 1D Tsallis entropy, fuzzy entropy, 2D Fisher, 2D maximum entropy and 2D cross entropy. All the original images and segmented results are shown in Figures 4–13.
In order to evaluate the segmentation objectively, the absolute error ratio [57] is used as the performance indicator in this paper, which is defined as follows:
The absolute error is defined as the absolute difference of the number of target pixels between the optimum thresholding image and the thresholding image obtained by each methods. The optimum threshold image and the corresponding threshold are acquired manually through visual inspection.
5.1. Comparison of Optimization Ability
For testing the effectiveness of the proposed MCBA based 2D Tsallis entropy algorithm, five nature images and five infrared images have been implemented separately for this method. The evaluation metrics for examining the performance of the method are made with the choice of the absolute error ratio, which is utilized to ensure the quality of the thresholding images. In order to evaluate and compare its optimization ability, MCBA is compared with other evaluation algorithms such as GA, PSO, ACO, DE, BA and CBA.
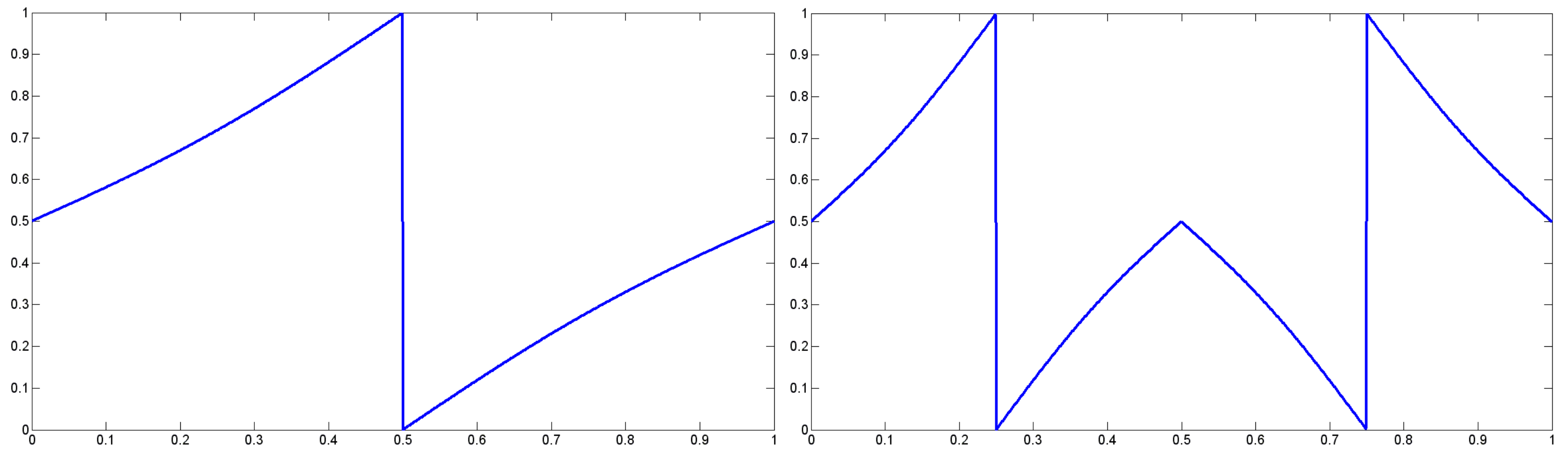
Table 6 shows the average fitness value of 2D Tsallis entropy respectively using GA, PS, ACO, DE, BA for 10 test images. The fitness value of GA, PSO and ACO is distinctly worse than that of DE and BA, and the maximum difference of the average fitness value between them is more than 2.9. For “MRI” and “GUN” images, the fitness value of DE and BA is very similar. However, for all of the 10 test images, BA has better optimization ability than DE. Moreover, its variance of the fitness value is also the minimum in all algorithms. For “SHIP”, “SKIMAN”, “PERSON” and “BIRD” image, the variance is lower than and the fitness value converges to the optimal solution, and other algorithms can not converge to the optimal solution for any test images, which illustrates that BA is a more stable and robust algorithm. In order to make a comparison between different chaotic strategies, Table 7 shows the average fitness value of 10 test images by using BA expect the local search and 11 different chaotic maps as the Section 3.2 showed. It is clear that the circle map is the best chaotic strategy among them; it has the maximum fitness value and minimum variance for all of the 10 test images. Although for “TARGET” and “GUN” images, the fitness value of tent map and gauss map is also very similar. For other seven test images, however, their fitness values are not very good. Moreover, Fan and Zhang [58] structured a new definition of piecewise map to carry out the chaotic process. In this paper, we proposed a novel piecewise circle map. The mapping curve and autocorrelation curve of the basic circle map and the piecewise circle map are respectively shown in Figure 2 and Figure 3, and the smaller autocorrelation coefficient is better [59]. Obviously, both the piecewise circle map and the basic circle map have a very small autocorrelation coefficient; they are as good enough as chaotic sequences. However, in contrast, the three maximum autocorrelation coefficients of the piecewise circle map and the basic circle map are 0.0713, 0.0694, 0.0632 and 0.0967, 0.0843, 0.0747, and the minimum are −0.1049, −0.0738, −0.0710 and −0.0986, −0.0835, −0.0757; respectively. Both the minimum and maximum autocorrelation coefficient of the piecewise circle map are all smaller than that of the basic circle map, and the average and variance of the piecewise circle map and the basic circle map are , and , 0.0010, while the average and variance of piecewise circle map are all much closer to 0. Hence, the piecewise circle map is more random and decentralized. The fitness value based on the piecewise circle map is better than that from using the basic circle map. The piecewise circle map is defined as Equation (31):
where denotes the value of the chaotic variable x at the iteration, , while and are the control parameters; here, , and .
In addition, results of the proposed method are compared with three other methods, namely (i) local search before chaos using Equation (14) (ii) local search after chaos using Equation (14) and (iii) local search before chaos using Equation (28), which is shown in Table 8. It is obvious that Levy flight is a better-performing local search method. For all test images, its fitness value and variance are all better than that of Equation (14). On the other side, local search after chaos is a more reasonable idea; the chaotic process let the population have an extensive search space, and then the local search makes each individual around the optimal solutions. Finally, Table 9 shows the selected threshold and absolute error ratio of 10 test images. It is obviously revealed that GA, PSO, ACO, DE and basic BA can all make an optimization for 2D Tsallis entropy; the result is acceptable, but its threshold still has some differences compared with manual thresholding. The average threshold difference between those is more than 5; the maximum threshold difference is more than 10. However, the average threshold difference between the proposed method and manual thresholding is about 1, and the maximum threshold difference is only 5. At the same time, the absolute error ratio of the proposed method is lower than for all of the 10 test images, and there are four test images for which absolute error ratio is as low as 0. The selected threshold of the proposed method is very close to manual thresholding, and its performance is better than other methods. The experiment shows that the proposed method has a better optimizing efficiency and convergence ability. The performance of the proposed method is better than other algorithms, which is more suitable for real-time image segmentation application using 2D Tsallis entropy.
5.2. Visual Evaluation of the Segmented Image
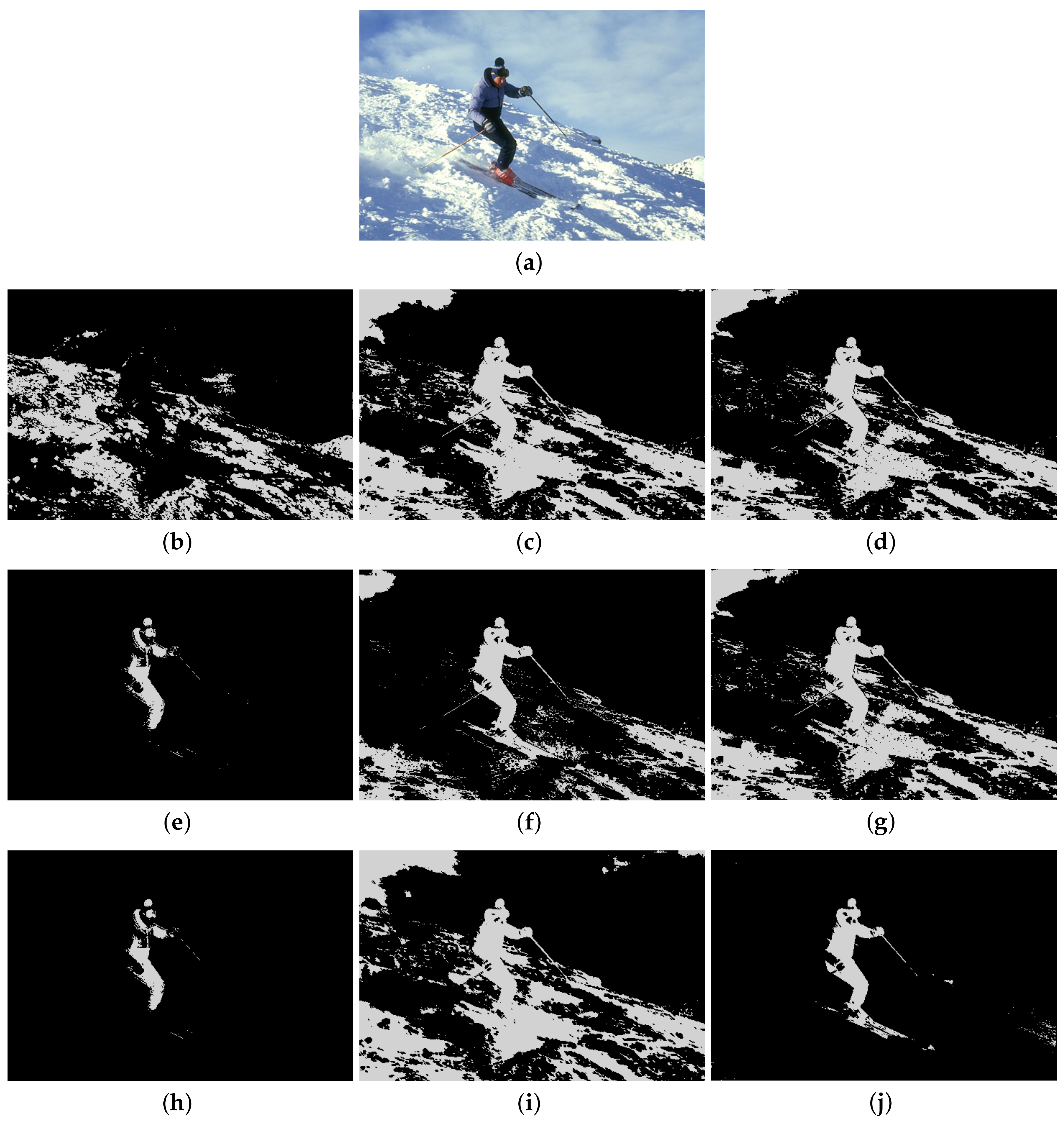
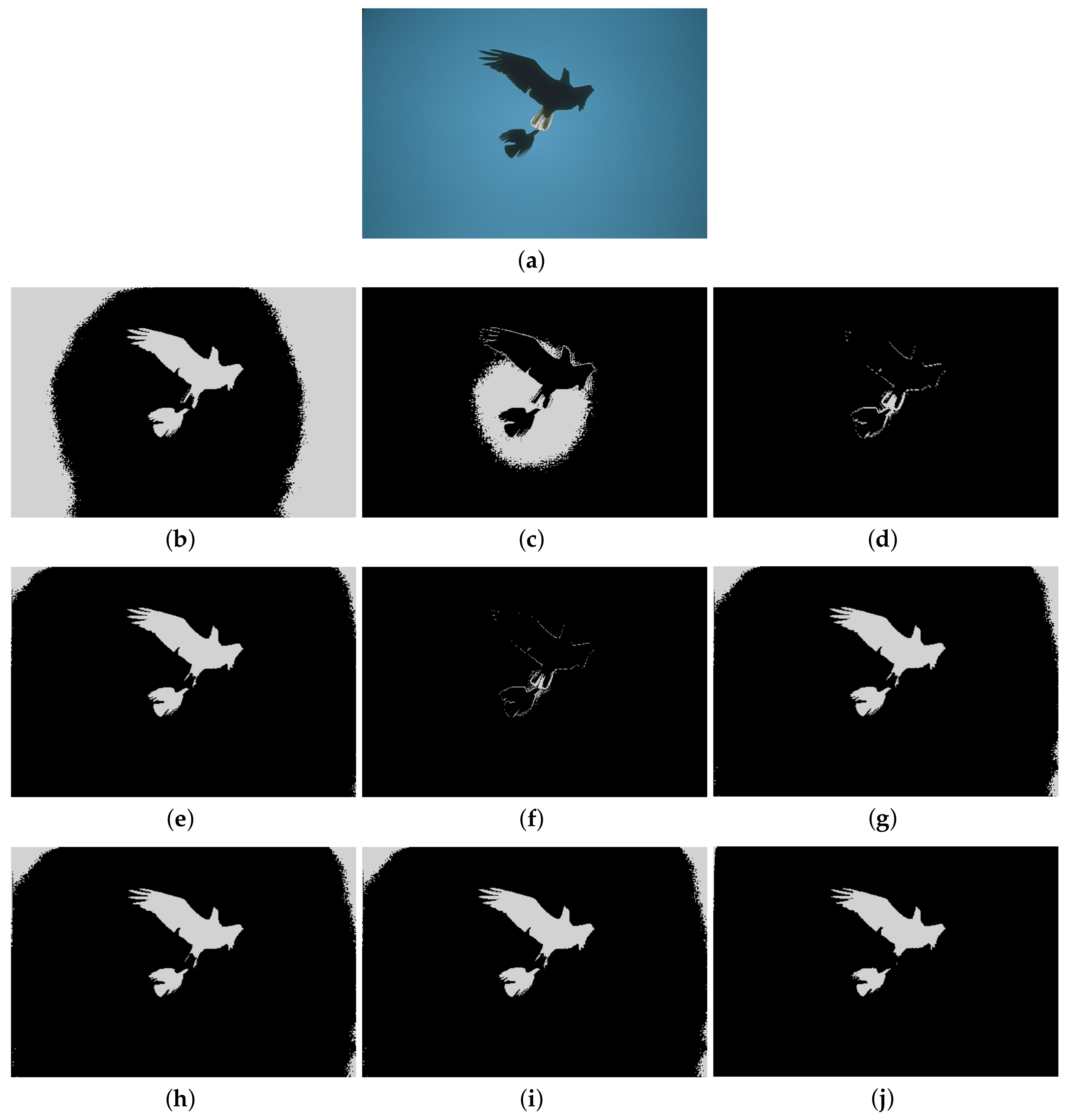
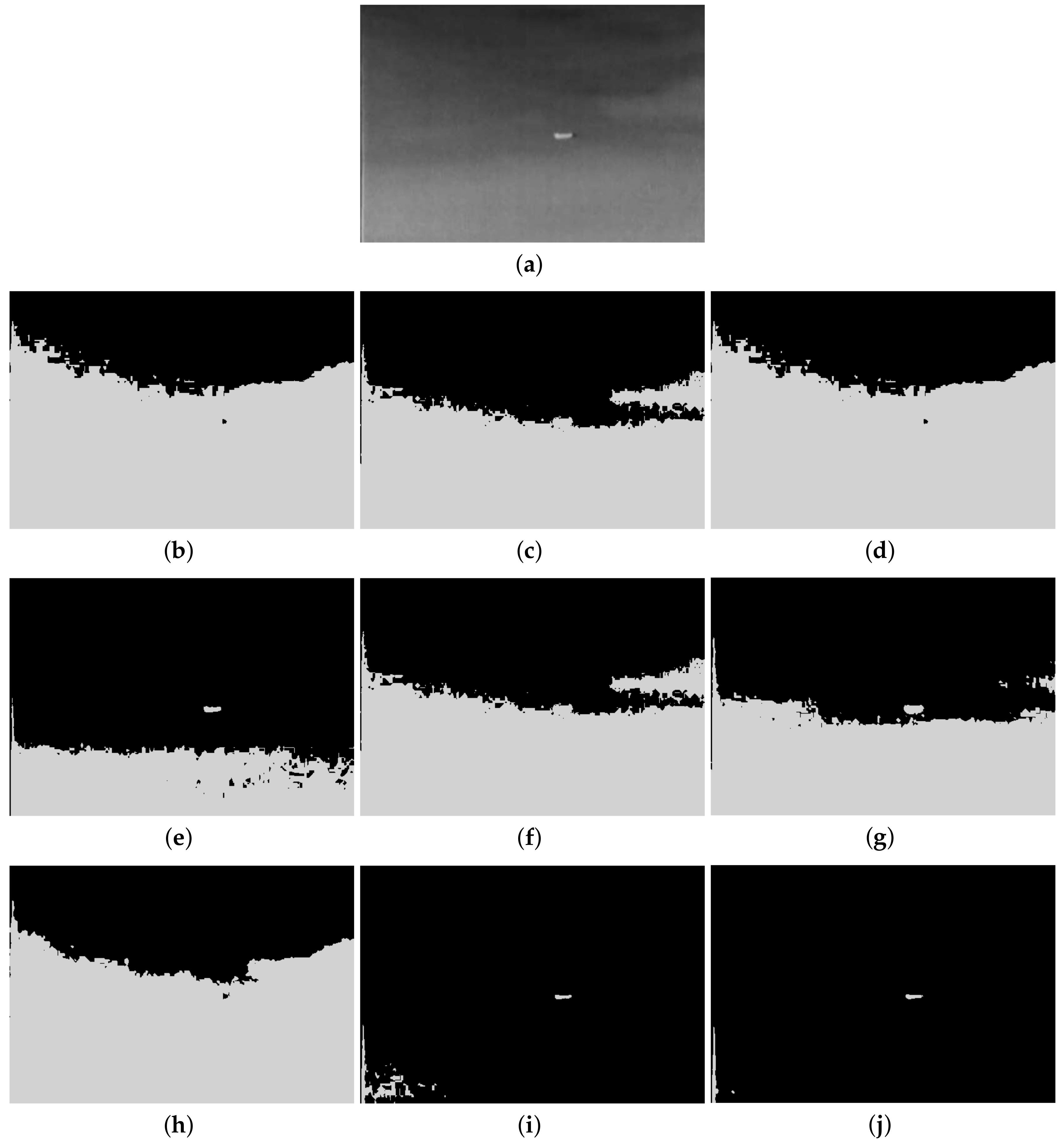
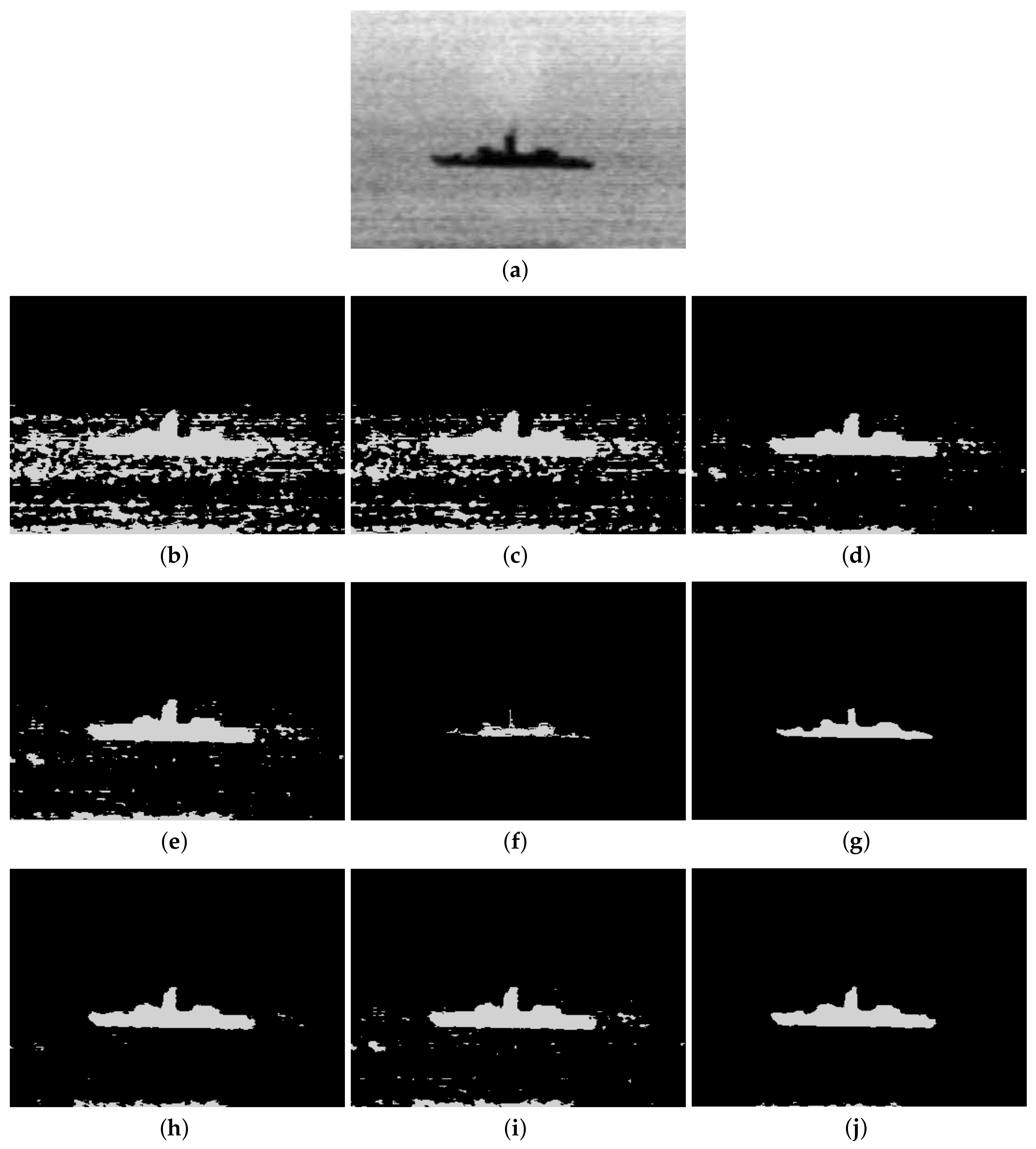
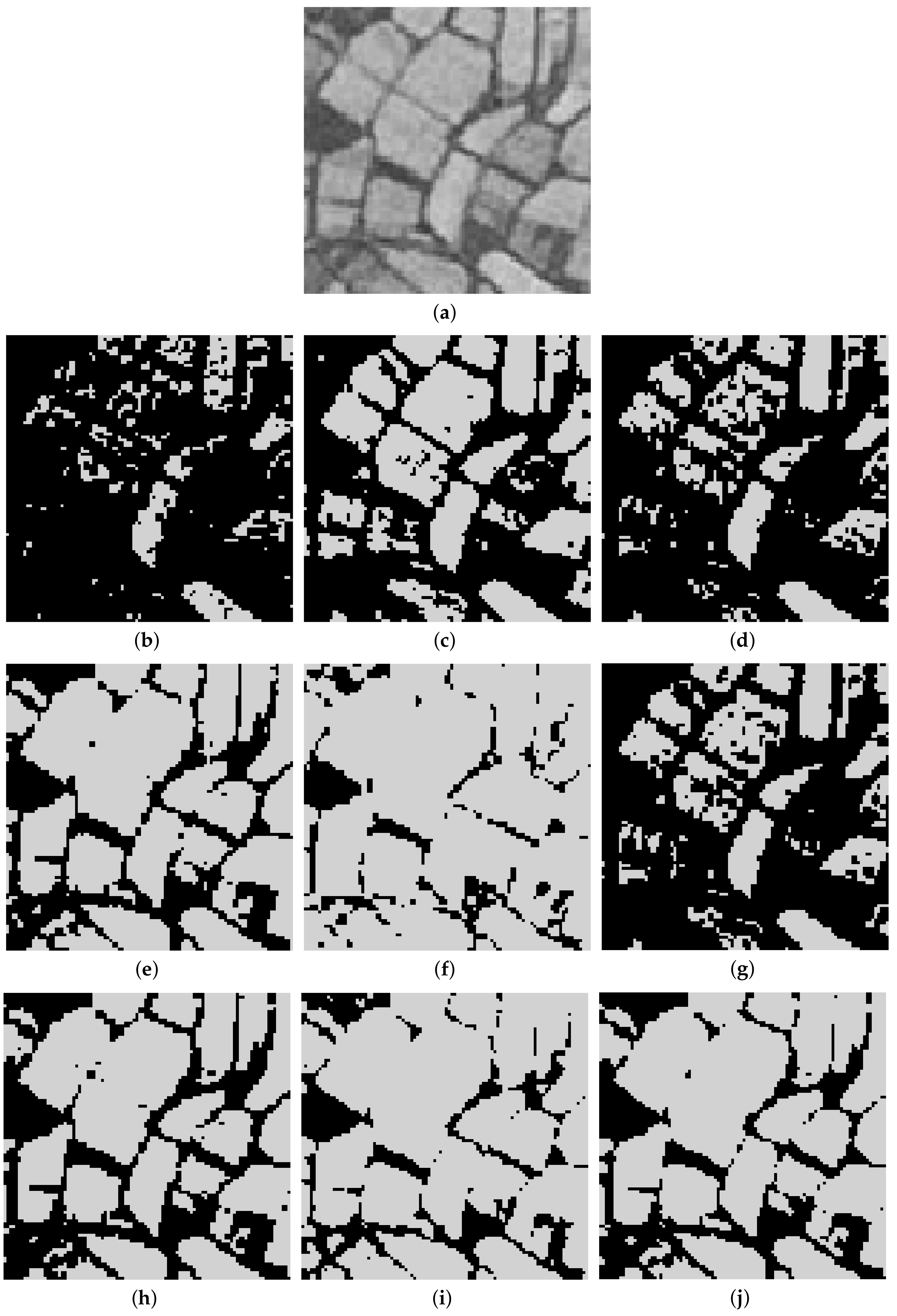
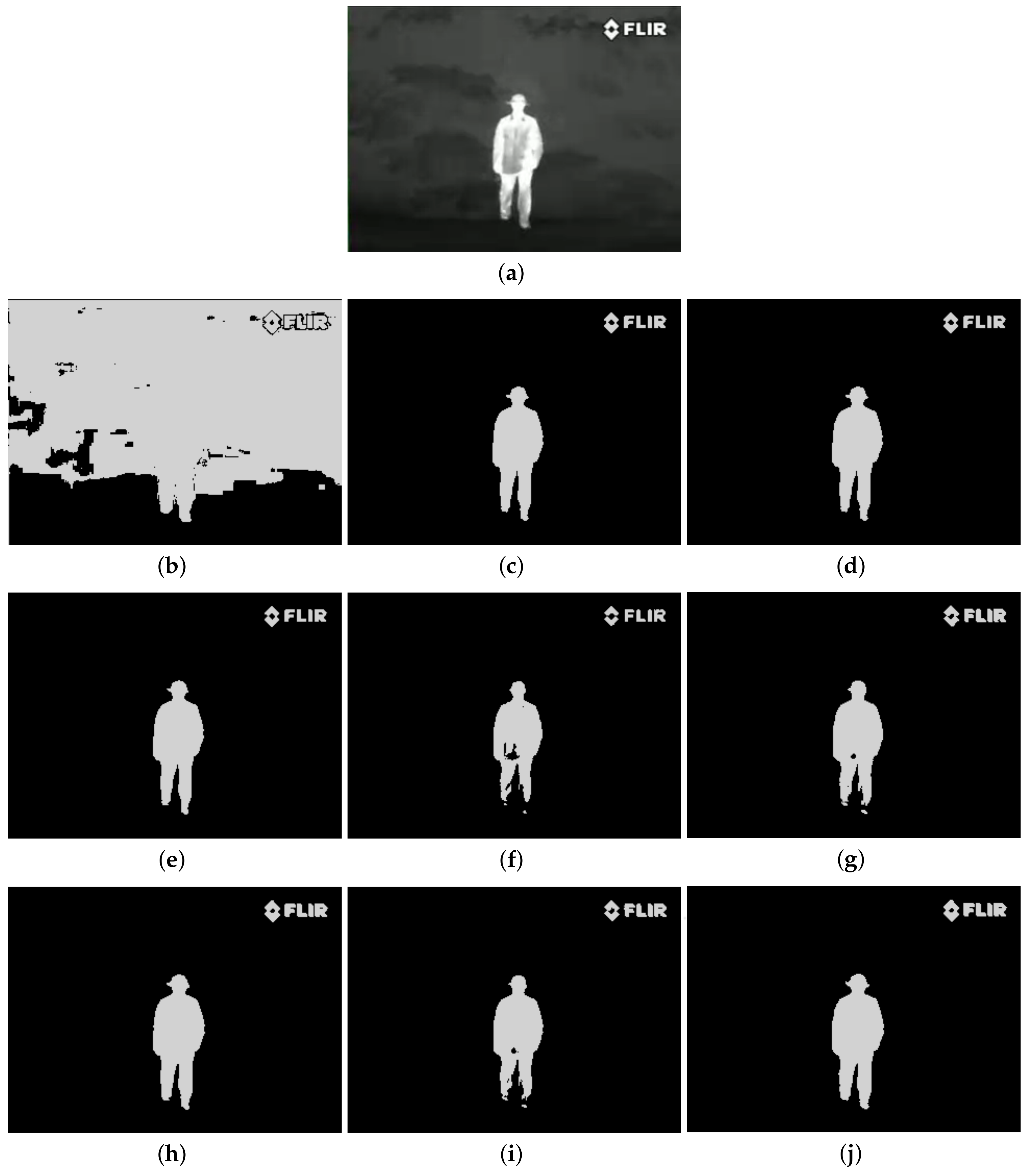
The qualitative performance of the proposed method and the contemporary methods are given in Figure 4, Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13, respectively. The original images are shown in Figure 4a, Figure 5a, Figure 6a, Figure 7a, Figure 8a, Figure 9a, Figure 10a, Figure 11a, Figure 12a and Figure 13a. The segmented images of the same by 1D Fisher, 1D maximum entropy, 1D cross entropy, 1D Tsallis entropy, fuzzy entropy, 2D Fisher, 2D maximum entropy, 2D cross entropy and the proposed method are shown in Figure 4b–j, Figure 5b–j, Figure 6b–j, Figure 7b–j, Figure 8b–j, Figure 9b–j, Figure 10b–j, Figure 11b–j, Figure 12b–j and Figure 13b–j, respectively. According to the segmented images, 1D Tsallis entropy method has the best segmentation effect among all of the 1D histogram based thresholding methods. For some test images, the segmented result is even better than a portion of 2D histogram based thresholding method. Basically, all of the 2D histogram based thresholding methods have the better segmentation effect than corresponding 1D histogram based thresholding methods. Although 2D maximum entropy can make a great effect for four test images, for all of the 10 test images, its effect is not very good. The experiment shows that the MCBA based 2D Tsallis entropy algorithm provides the best thresholding performance among all methods being compared.
6. Conclusions
Automatically and adaptively selecting a robust, optimum threshold to separate an object from the background has been a hot topic in the field of image analysis. Among entropy-based methods, the methods based on Tsallis entropy has been proved to be an effective thresholding strategy and widely applied in image segmentation. However, entropy-based methods based on 1D histograms do not contain the spatial correlation information within the neighborhood. When the proportion of the target area is very small, its threshold of test image is very easy to drift or shift. Hence, some entropy methods based on 2D histograms containing the 2D Tsallis entropy method are proposed. To measure the segmentation capabilities, results of the proposed method are respectively compared with 1D Fisher, 1D cross entropy, 1D maximum entropy, 1D Tsallis entropy, fuzzy entropy, 2D Fisher, 2D maximum entropy and 2D cross entropy. Due to the 2D Tsallis entropy-based thresholding method having high computational costs, which requires a great deal of computation to seek a group of parameters, some meta-heuristics algorithms were employed to speed up the basic 2D Tsallis entropy-based thresholding method. However, these methods easily fall into the local optimum. Compared with chaotic maps of tent, iterative, gauss, dyadic, circle, cheby, sinus, singer, sinusoidal, sin, and logical, we proposed a novel piecewise circle map and proved its performance. In order to upgrade the search mechanism of the standard BA, chaotic sequences generated by the piecewise circle map and Levy flight are incorporated into the BA.
In the paper, MCBA is proposed and applied to the 2D Tsallis entropy algorithm for gray-level images segmentation, which employs MCBA to look for the best combination of all the parameters. Results of the proposed method are compared with some other meta-heuristics algorithms, like GA, ACO, DE, PSO, BA and CBA. Among these methods, the proposed method can converge to the optimal solution, and the segmentation results are better than other methods involved in this paper, which is a practical thresholding approach. However, the q parameter is not investigated here, which plays a crucial part as a tuning parameter in the image segmentation and is set a constant value. In future work, we will concentrate on (1) analysis of segmented results with different q values; and the (2) automatic and fine q-adjusting method.
Supplementary Materials
Supplementary material is available online at https://0-www-mdpi-com.brum.beds.ac.uk/1099-4300/20/4/239/s1.
Acknowledgments
This work is funded by the National Natural Science Foundation of China under Grant No. 41301371, 51372076, 61502155, 61772180, funded by the State Key Laboratory of Geo-Information Engineering, No. SKLGIE2014-M-3-3 and supported by a project of Hubei Provincial Department of Education (Q20131407). This work was supported by the Green Industry Technology Leading Project of Hubei University of Technology (No. ZZTS2016004).
Author Contributions
Zhiwei Ye and Mingwei Wang conceived and designed the experiments; Juan Yang and Mingwei Wang performed the experiments; Xinlu Zong, Lingyu Yan and Wei Liu analyzed the data; Juan Yang and Mingwei Wang contributed analysis tools; Juan Yang and Mingwei Wang wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
References
- Luciano, L.; Hamza, A.B. Deep learning with geodesic moments for 3D shape classification. Pattern Recognit. Lett. 2017, 105, 182–190. [Google Scholar] [CrossRef]
- Chen, C.T.; Tsao, C.K.; Lin, W.C. Medical image segmentation by a constraint satisfaction neural network. IEEE Trans. Nucl. Sci. 2016, 38, 678–686. [Google Scholar] [CrossRef]
- Vasuki, Y.; Holden E, J.; Kovesi, P.; Micklethwaite, S. An interactive image segmentation method for lithological boundary detection: A rapid mapping tool for geologists. Comput. Geosci. 2017, 100, 27–40. [Google Scholar] [CrossRef]
- Li, L.; Sun, L.; Guo, J.; Qi, J.; Xu, B.; Li, S. Modified Discrete Grey Wolf Optimizer Algorithm for Multilevel Image Thresholding. Comput. Intell. Neurosci. 2017, 2017, 285–296. [Google Scholar] [CrossRef] [PubMed]
- Pare, S.; Bhandari A, K.; Kumar, A.; Singh, G.K. An optimal Color Image Multilevel Thresholding Technique Using Grey-Level Co-occurrence Matrix. Expert Syst. Appl. 2017, 87, 335–362. [Google Scholar] [CrossRef]
- Yang, J.; He, Y.; Caspersen, J. Region merging using local spectral angle thresholds: A more accurate method for hybrid segmentation of remote sensing images. Remote Sens. Environ. 2017, 190, 137–148. [Google Scholar] [CrossRef]
- Wang, B.; Chen, L.L.; Cheng, J. New Result on Maximum Entropy Threshold Image Segmentation Based on P System. Optik 2018, 163, 81–85. [Google Scholar] [CrossRef]
- Galland, F.; Nicolas, J.M.; Sportouche, H.; Roche, M.; Tupin, F.; Refregier, P. Unsupervised Synthetic Aperture Radar Image Segmentation Using Fisher Distributions. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2966–2972. [Google Scholar] [CrossRef]
- Wei, W.; Shen, X.J.; Qian, Q.J. An adaptive thresholding algorithm based on grayscale wave transformation for industrial inspection images. Acta Autom. Sin. 2011, 37, 944–953. [Google Scholar]
- Li, C.H.; Tam, P.K.S. An iterative algorithm for minimum cross entropy thresholding. Pattern Recognit. Lett. 1998, 19, 771–776. [Google Scholar] [CrossRef]
- Sahoo, P.; Wilkins, C.; Yeager, J. Threshold selection using Renyi’s entropy. Pattern Recognit. 1997, 30, 71–84. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Kumar, A.; Singh, G.K. Tsallis entropy based multilevel thresholding for colored satellite image segmentation using evolutionary algorithms. Expert Syst. Appl. 2015, 42, 8707–8730. [Google Scholar] [CrossRef]
- Wang, Y.; Xia, S.T.; Wu, J. A less-greedy two-term Tsallis Entropy Information Metric approach for decision tree classification. Knowl. Based Syst. 2017, 120, 34–42. [Google Scholar] [CrossRef]
- Portes de Albuquerque, M.; Esquef, I.A.; Gesualdi Mello, A.R.; Portes de Albuquerque, M. Image thresholding using Tsallis entropy. Pattern Recognit. Lett. 2004, 25, 1059–1065. [Google Scholar] [CrossRef]
- Khader, M.; Schiavi, E.; Hamza, A.B. A Multicomponent Approach to Nonrigid Registration of Diffusion Tensor Images; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2017. [Google Scholar]
- Mohamed, W.; Hamza, A.B. Medical image registration using stochastic optimization. Opt. Lasers Eng. 2010, 48, 1213–1223. [Google Scholar] [CrossRef]
- Brink, A. Thresholding of digital images using two-dimensional entropies. Pattern Recognit. 1992, 25, 803–808. [Google Scholar] [CrossRef]
- Sahoo, P.; Arora, G. A thresholding method based on two-dimensional Renyi’s entropy. Pattern Recognit. 2004, 37, 1149–1161. [Google Scholar] [CrossRef]
- Wu, C.M.; Tian, X.P.; Tan, T.N. Modification of two-dimensional entropy thresholding method and its fast iterative algorithm. Pattern Recognit. Artif. Intell. 2010, 23, 127–136. [Google Scholar]
- Guo, W.Y.; Wang, X.F.; Xia, X.Z. Two-dimensional Otsu’s thresholding segmentation method based on grid box filter. Optik Int. J. Light Electron Opt. 2014, 125, 5234–5240. [Google Scholar] [CrossRef]
- Huang, L.; Fang, Y.; Zuo, X.; Yu, X. Automatic Change Detection Method of Multitemporal Remote Sensing Images Based on 2D-Otsu Algorithm Improved by Firefly Algorithm. J. Sens. 2015, 2015, 1–8. [Google Scholar] [CrossRef]
- Abdel-Khalek, S.; Ishak, A.B.; Omer, O.A.; Obada, A.-S.F. A two-dimensional image segmentation method based on genetic algorithm and entropy. Optik Int. J. Light Electron Opt. 2016, 131, 414–422. [Google Scholar] [CrossRef]
- Zhou, C.; Tian, L.; Zhao, H.; Zhao, K. A method of Two-Dimensional Otsu image threshold segmentation based on improved Firefly Algorithm. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, Shenyang, China, 8–12 June 2015; pp. 1420–1424. [Google Scholar]
- Sarkar, S.; Das, S. Multilevel Image Thresholding Based on 2D Histogram and Maximum Tsallis Entropy—A Differential Evolution Approach. IEEE Trans. Image Process. 2013, 22, 4788–4797. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Wang, D.; Liu, C. Two Dimension Threshold Image Segmentation Based on Improved Artificial Fish-Swarm Algorithm. In Proceedings of the International Conference on Chemical, Material and Food Engineering (CMFE-2015), Kunming, China, 25–26 July 2015. [Google Scholar]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Bristol, UK, 2010. [Google Scholar]
- Yousefi, M.; Yousefi, M.; Ferreira, R.P.M.; Kim, J.H.; Fogliatto, F.S. Chaotic genetic algorithm and Adaboost ensemble metamodeling approach for optimum resource planning in emergency departments. Artif. Intell. Med. 2017, 84, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Yang, J.; Wu, C.; Lu, M.; Zhao, X.J. Solving 0–1 knapsack problems by chaotic monarch butterfly optimization algorithm with Gaussian mutation. Memet. Comput. 2016, 1–16. [Google Scholar] [CrossRef]
- Chen, K.; Zhou, F.; Liu, A. Chaotic Dynamic Weight Particle Swarm Optimization for Numerical Function Optimization. Knowl. Based Syst. 2018, 139, 23–40. [Google Scholar] [CrossRef]
- Sayed, G.I.; Khoriba, G.; Haggag, M.H. A novel chaotic salp swarm algorithm for global optimization and feature selection. Appl. Intell. 2018, 1–20. [Google Scholar] [CrossRef]
- Adarsh, B.R.; Raghunathan, T.; Jayabarathi, T.; Yang, X.S. Economic dispatch using chaotic bat algorithm. Energy 2016, 96, 666–675. [Google Scholar] [CrossRef]
- Suresh, S.; Lal, S. Multilevel Thresholding based on Chaotic Darwinian Particle Swarm Optimization for Segmentation of Satellite Images. Appl. Soft Comput. 2017, 55, 503–522. [Google Scholar] [CrossRef]
- Wang, M.; Wan, Y.; Ye, Z.; Gao, X.; Lai, X. A band selection method for airborne hyperspectral image based on chaotic binary coded gravitational search algorithm. Neurocomputing 2017, 273, 57–67. [Google Scholar] [CrossRef]
- Mlakar, U.; Brest, J.; Fister, I. A study of chaotic maps in differential evolution applied to gray-level image thresholding. In Proceedings of the IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016. [Google Scholar]
- Wang, G.G.; Deb, S.; Gandomi, A.H.; Zhang, A.; Alavi, A.H. Chaotic cuckoo search. Soft Comput. 2016, 20, 3349–3362. [Google Scholar] [CrossRef]
- Wang, L.; Zhong, Y. Cuckoo Search Algorithm with Chaotic Maps. Math. Probl. Eng. 2015, 2015, 1–14. [Google Scholar] [CrossRef]
- Zhang, C.; Cui, G.; Peng, F. A novel hybrid chaotic ant swarm algorithm for heat exchanger networks synthesis. Appl. Therm. Eng. 2016, 104, 707–719. [Google Scholar] [CrossRef]
- Oliva, D.; Aziz, M.A.E.; Hassanien, A.E. Parameter estimation of photovoltaic cells using an improved chaotic whale optimization algorithm. Appl. Energy 2017, 200, 141–154. [Google Scholar] [CrossRef]
- Koupaei, J.A.; Hosseini, S.M.M.; Ghaini, F.M.M. A new optimization algorithm based on chaotic maps and golden section search method. Eng. Appl. Artif. Intell. 2016, 50, 201–214. [Google Scholar] [CrossRef]
- Aydogdu, I. Cost optimization of reinforced concrete cantilever retaining walls under seismic loading using a biogeography-based optimization algorithm with Levy flights. Eng. Optim. 2016, 49, 381–400. [Google Scholar] [CrossRef]
- Yan, B.; Zhao, Z.; Zhou, Y.; Yuan, W.; Li, J.; Wu, J.; Cheng, D. A particle swarm optimization algorithm with random learning mechanism and Levy flight for optimization of atomic clusters. Comput. Phys. Commun. 2017, 219, 79–86. [Google Scholar] [CrossRef]
- Jensi, R.; Jiji, G.W. An enhanced particle swarm optimization with levy flight for global optimization. Appl. Soft Comput. 2016, 43, 248–261. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with Lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Gray, R.M. Entropy and Information Theory; Springer: New York, NY, USA, 2011. [Google Scholar]
- Tsallis, C. Possible generalization of Boltzmann-Gibbs statistics. J. Stat. Phys. 1988, 52, 479–487. [Google Scholar] [CrossRef]
- Ramírez-Reyes, A.; Hernández-Montoya, A.; Herrera-Corral, G.; Domínguez-Jiménez, I. Determining the Entropic Index q of Tsallis Entropy in Images through Redundancy. Entropy 2016, 18, 299. [Google Scholar] [CrossRef]
- Cheng, H.D.; Chen, Y.H.; Jiang, X.H. Thresholding using two-dimensional histogram and fuzzy entropy principle. IEEE Trans. Image Process. 1999, 9, 732–735. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wu, L. Optimal Multi-Level Thresholding Based on Maximum Tsallis Entropy via an Artificial Bee Colony Approach. Entropy 2011, 13, 841–859. [Google Scholar] [CrossRef]
- Shih, C.J.; Teng, T.L.; Chen, S.K. A Niche-Related Particle Swarm Meta-Heuristic Algorithm for Multimodal Optimization. In Proceedings of the 2nd International Conference on Intelligent Technologies and Engineering Systems (ICITES2013), Kaohsiung, Taiwan, 12–14 December 2013; Springer International Publishing: Berlin, Germany, 2014; pp. 313–321. [Google Scholar]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. In Proceedings of the Nature Inspired Cooperative Strategies for Optimization (NICSO), Canterbury, UK, 12–14 May 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. [Google Scholar]
- Yang, X.S.; Deb, S. Cuckoo search via Levy flights. In Proceedings of Nature & Biologically Inspired Computing, Coimbatore, India, 9–11 December 2009; IEEE: Coimbatore, India, 2009; pp. 210–214. [Google Scholar]
- Yang, X.S.; He, X. Bat algorithm: literature review and applications. Int. J. Bio-Inspir. Comput. 2013, 5, 141–149. [Google Scholar] [CrossRef]
- Yang, D.; Liu, Z.; Zhou, J. Chaos optimization algorithms based on chaotic maps with different probability distribution and search speed for global optimization. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1229–1246. [Google Scholar] [CrossRef]
- Kovacic, I.; Brennan, M.J. The Duffing Equation: Nonlinear Oscillators and Their Behaviour; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Raichlen, D.A.; Wood, B.M.; Gordon, A.D.; Mabulla, A.Z.P.; Marlowe, F.W.; Pontzer, H. Evidence of Levy walk foraging patterns in human hunter–gatherers. Proc. Natl. Acad. Sci. USA 2014, 111, 728–733. [Google Scholar] [CrossRef] [PubMed]
- Rhee, I.; Shin, M.; Hong, S.; Lee, K.; Kim, S.J.; Chong, S. On the Levy-walk nature of human mobility. IEEE/ACM Trans. Netw. 2011, 19, 630–643. [Google Scholar] [CrossRef]
- Tao, W.B.; Tian, J.W.; Liu, J. Image segmentation by three-level thresholding based on maximum fuzzy entropy and genetic algorithm. Pattern Recognit. Lett. 2003, 24, 3069–3078. [Google Scholar] [CrossRef]
- Fan, J.L.; Zhang, X.F. Piecewise Logistic Chaotic Map and It s Performance Analysis. Acta Electron. Sin. 2009, 37, 720–725. [Google Scholar]
- An, H.; Gao, X.; Fang, W.; Huang, X.; Ding, Y. The role of fluctuating modes of autocorrelation in crude oil prices. Phys. A Stat. Mech. Its Appl. 2014, 393, 382–390. [Google Scholar] [CrossRef]
Figure 1.
The 2D histogram plane.

Figure 2.
Mapping curve of the basic circle map and the piecewise circle map.

Figure 3.
Autocorrelation curve of the basic circle map and the piecewise circle map.

Figure 4.
Segmented results of SKIMAN image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 4.
Segmented results of SKIMAN image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 5.
Segmented results of BIRD image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 5.
Segmented results of BIRD image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 6.
Segmented results of AIRPORT image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 6.
Segmented results of AIRPORT image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 7.
Segmented results of PLANE image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 7.
Segmented results of PLANE image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 8.
Segmented results of Magnetic Resonance Imaging (MRI) image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 8.
Segmented results of Magnetic Resonance Imaging (MRI) image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 9.
Segmented results of TARGET image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 9.
Segmented results of TARGET image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 10.
Segmented results of SHIP image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 10.
Segmented results of SHIP image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 11.
Segmented results of FIELD image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 11.
Segmented results of FIELD image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 12.
Segmented results of PISTOL image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 12.
Segmented results of PISTOL image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.

Figure 13.
Segmented results of PERSON image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.
Figure 13.
Segmented results of PERSON image: (a) original image; (b) 1D Fisher; (c) 1D cross entropy; (d) 1D maximum entropy; (e) 1D Tsallis entropy; (f) fuzzy entropy; (g) 2D Fisher; (h) 2D cross entropy; (i) 2D maximum entropy; (j) proposed method.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Parameters used in the Bat algorithm.
| Parameter | Explanation | Value |
|---|---|---|
| N | Number of bat(s) | 30 |
| Maximum iteration number | 50 | |
| L | Gray-scale of test image | 256 |
| Rate of pulse emission | (0,1) | |
| Loudness | (1,2) |
Table 2.
Parameters used in genetic algorithm (GA).
| Parameter | Explanation | Value |
|---|---|---|
| N | Number of genetic(s) | 30 |
| Maximum iteration number | 50 | |
| L | Gray-scale of test image | 256 |
| Selection ratio | 0.9 | |
| Crossover ratio | 0.8 | |
| Mutation ratio | 0.05 |
Table 3.
Parameters used in particle swarm optimization (PSO).
| Parameter | Explanation | Value |
|---|---|---|
| N | Number of particle(s) | 30 |
| Maximum iteration number | 50 | |
| L | Gray-scale of test image | 256 |
| Positive acceleration constants | (0,2) | |
| Random numbers | (0,1) |
Table 4.
Parameters used in ant colony optimization algorithm (ACO).
| Parameter | Explanation | Value |
|---|---|---|
| N | Number of ant(s) | 30 |
| Maximum iteration number | 50 | |
| L | Gray-scale of test image | 256 |
| , | Relative importance of trail versus | 1 |
| Evaporation of pheromone | (0,1) |
Table 5.
Parameters used in differential evolution algorithm (DE).
| Parameter | Explanation | Value |
|---|---|---|
| N | Number of individual(s) | 30 |
| Maximum iteration number | 50 | |
| L | Gray-scale of test image | 256 |
| Mutation factor | 0.54 | |
| Crossover rate | 0.6 |
Table 6.
Land use classes in the Bagmati watershed at Khokana gauging station.
| Image | Fitness Value/Variance | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| GA | PSO | ACO | DE | BA | ||||||
| Fitness | Variance | Fitness | Variance | Fitness | Variance | Fitness | Variance | Fitness | Variance | |
| AIRPORT | 83.1028 | 0.9902 | 83.3528 | 0.2585 | 83.4129 | 0.2714 | 83.4525 | 0.2391 | 83.5152 | 0.2052 |
| PLANE | 53.1643 | 0.5466 | 53.2977 | 0.3504 | 53.3612 | 0.2421 | 53.4279 | 0.1785 | 53.4454 | 0.1661 |
| BIRD | 32.6768 | 1.0563 | 34.6139 | 0.4007 | 35.1675 | 0.277 | 36.4929 | 0.1764 | 35.6323 | 0.137 |
| SKIMAN | 104.4435 | 0.1831 | 104.4531 | 0.1468 | 104.5013 | 0.0665 | 104.5476 | 0.0537 | 104.6098 | 0.046 |
| MRI | 56.0164 | 0.1244 | 56.0269 | 0.0935 | 56.0414 | 0.0794 | 56.0506 | 0.0786 | 56.0572 | 0.07 |
| SHIP | 75.4637 | 0.1754 | 75.4967 | 0.1568 | 75.5389 | 0.1265 | 75.5552 | 0.1156 | 75.5782 | 0.0976 |
| FIELD | 78.355 | 0.1862 | 78.3741 | 0.1748 | 78.4185 | 0.1571 | 78.4359 | 0.148 | 78.4559 | 0.1359 |
| TARGET | 29.6825 | 0.7195 | 29.8642 | 0.6341 | 29.9987 | 0.5543 | 30.1589 | 0.5195 | 30.2151 | 0.4113 |
| PISTOL | 49.9564 | 0.1145 | 49.9624 | 0.0885 | 49.9955 | 0.068 | 50.0008 | 0.0675 | 50.0104 | 0.0607 |
| PERSON | 54.0327 | 0.0795 | 54.0426 | 0.075 | 54.0571 | 0.0675 | 54.0666 | 0.0642 | 54.0794 | 0.0596 |
Table 7.
Fitness value and variance of 10 test images using different chaotic maps.
| Image | Fitness Value/Variance | |||||||||||
| Logical | Sin | Sinusoidal | Singer | Sinus | Cheby | |||||||
| Fv. | Var. | Fv. | Var. | Fv. | Var. | Fv. | Var. | Fv. | Var. | Fv. | Var. | |
| AIRPORT | 83.4556 | 0.1874 | 83.4476 | 0.2245 | 83.4069 | 0.2542 | 83.4477 | 0.2167 | 83.4015 | 0.2236 | 83.4016 | 0.2381 |
| PLANE | 53.4604 | 0.1499 | 53.4465 | 0.1782 | 53.4032 | 0.2073 | 53.4379 | 0.1871 | 53.3114 | 0.2812 | 53.408 | 0.2014 |
| BIRD | 35.2108 | 0.2488 | 35.2628 | 0.2211 | 35.2907 | 0.1925 | 34.7253 | 0.3986 | 35.4217 | 0.1635 | 35.3386 | 0.1813 |
| SKIMAN | 104.5371 | 0.1287 | 104.5166 | 0.1422 | 104.5127 | 0.1389 | 104.4798 | 0.1749 | 104.514 | 0.1445 | 104.5233 | 0.1328 |
| MRI | 56.0493 | 0.0508 | 56.0375 | 0.0599 | 56.06 | 0.046 | 56.0333 | 0.0616 | 56.0598 | 0.0361 | 56.0569 | 0.0378 |
| SHIP | 75.5802 | 0.0993 | 75.5699 | 0.0831 | 75.5589 | 0.0911 | 75.5465 | 0.1175 | 75.569 | 0.0943 | 75.566 | 0.0779 |
| FIELD | 78.4559 | 0.1365 | 78.4335 | 0.1441 | 78.3985 | 0.161 | 78.4069 | 0.1558 | 78.4072 | 0.1511 | 78.3902 | 0.1664 |
| TARGET | 30.0874 | 0.4777 | 30.1089 | 0.451 | 30.3689 | 0.4687 | 30.0806 | 0.4875 | 30.0907 | 0.4633 | 30.0189 | 0.5151 |
| PISTOL | 49.9834 | 0.07 | 49.9777 | 0.0798 | 49.9807 | 0.063 | 49.9715 | 0.0813 | 50.0054 | 0.0619 | 49.9863 | 0.0693 |
| PERSON | 54.0503 | 0.0652 | 54.0716 | 0.0623 | 54.0661 | 0.0645 | 54.0462 | 0.0692 | 54.0746 | 0.0551 | 54.0678 | 0.0549 |
| Image | Circle | Dyadic | Gauss | Iterative | Tent | Proposed | ||||||
| Fv. | Var. | Fv. | Var. | Fv. | Var. | Fv. | Var. | Fv. | Var. | Fv. | Var. | |
| AIRPORT | 83.5375 | 0.1639 | 83.4889 | 0.1701 | 83.4244 | 0.2483 | 83.3773 | 0.2395 | 83.5044 | 0.171 | 83.5573 | 0.1489 |
| PLANE | 53.4858 | 0.1391 | 53.4493 | 0.1672 | 53.3666 | 0.2266 | 53.3249 | 0.2756 | 53.4277 | 0.2045 | 53.4949 | 0.1197 |
| BIRD | 35.8136 | 0.1217 | 35.4958 | 0.1442 | 35.5737 | 0.1487 | 35.569 | 0.1434 | 35.484 | 0.1583 | 35.8509 | 0.1171 |
| SKIMAN | 104.5839 | 0.0805 | 104.5375 | 0.1224 | 104.5459 | 0.1118 | 104.5556 | 0.1081 | 104.5556 | 0.1128 | 104.6035 | 0.0612 |
| MRI | 56.0704 | 0.0336 | 56.0653 | 0.0411 | 56.054 | 0.0499 | 56.0624 | 0.0408 | 56.0698 | 0.0391 | 56.0855 | 0.0306 |
| SHIP | 75.6066 | 0.0586 | 75.5978 | 0.0736 | 75.5693 | 0.0855 | 75.5283 | 0.1227 | 75.5802 | 0.0708 | 75.6082 | 0.0582 |
| FIELD | 78.4766 | 0.1184 | 78.4129 | 0.1508 | 78.4192 | 0.1465 | 78.3819 | 0.1771 | 78.4446 | 0.1435 | 78.4855 | 0.1139 |
| TARGET | 30.2985 | 0.3826 | 30.121 | 0.4404 | 29.9963 | 0.5143 | 30.0074 | 0.4968 | 30.2087 | 0.4175 | 30.4515 | 0.3486 |
| PISTOL | 50.0119 | 0.0556 | 49.9997 | 0.0643 | 50.0003 | 0.0644 | 50.0001 | 0.0596 | 49.9998 | 0.0669 | 50.0176 | 0.055 |
| PERSON | 54.0898 | 0.0506 | 54.0753 | 0.0625 | 54.0864 | 0.0538 | 54.0839 | 0.0561 | 54.0571 | 0.0546 | 54.0956 | 0.0469 |
Table 8.
Fitness value and variance of 10 test images using different methods.
| Image | Fitness Value/Variance | |||||||
|---|---|---|---|---|---|---|---|---|
| (i) | (ii) | (iii) | Proposed | |||||
| Fitness | Variance | Fitness | Variance | Fitness | Variance | Fitness | Variance | |
| AIRPORT | 83.5953 | 0.114 | 83.626 | 0.0799 | 83.674 | 0.059 | 83.694 | 0.039 |
| PLANE | 53.5156 | 0.0946 | 53.594 | 0.0749 | 53.6349 | 0.0357 | 53.6479 | 0.0061 |
| BIRD | 36.1578 | 0.0721 | 36.1643 | 0.0427 | 36.1937 | 0.0075 | 36.1979 | |
| SKIMAN | 104.6216 | 0.0451 | 104.6375 | 0.0284 | 104.6554 | 0.006 | 104.6579 | |
| MRI | 56.0961 | 0.0188 | 56.0976 | 0.0179 | 56.1109 | 0.015 | 56.1206 | 0.0074 |
| SHIP | 75.6485 | 0.0216 | 75.6496 | 0.0209 | 75.6651 | 0.0069 | 75.6691 | |
| FIELD | 78.5885 | 0.0919 | 78.6006 | 0.0833 | 78.6465 | 0.0706 | 78.6612 | 0.0523 |
| TARGET | 30.5192 | 0.2856 | 30.5275 | 0.2787 | 30.804 | 0.1424 | 30.9007 | 0.1261 |
| PISTOL | 50.0588 | 0.0372 | 50.0734 | 0.0193 | 50.0789 | 0.0119 | 50.0847 | 0.0041 |
| PERSON | 54.1278 | 0.0255 | 54.1351 | 0.0233 | 54.1471 | 0.0084 | 54.1501 | |
Table 9.
Selected threshold and error ratio () of 10 test images.
| Image | Size | Ref. Value | Selected Threshold/Error Ratio () | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GA | PSO | ACO | DE | BA | MCBA | |||||||||
| Threshold | Error | Threshold | Error | Threshold | Error | Threshold | Error | Threshold | Error | Threshold | Error | |||
| AIRPORT | 355 × 297 | 145,144 | 156,151 | 10.1 | 159,146 | 8.8 | 151,149 | 6.7 | 148,148 | 4.7 | 147,146 | 2.7 | 145,146 | 1.6 |
| PLANE | 540 × 360 | 157,157 | 146,158 | 13 | 154,152 | 5.9 | 161,160 | 3.8 | 159,161 | 3.4 | 162,157 | 2.1 | 158,159 | 1.7 |
| BIRD | 481 × 321 | 8973 | 110,93 | 26.4 | 9883 | 11.6 | 8983 | 7.1 | 9279 | 3.3 | 8871 | 1.9 | 8973 | 0 |
| SKIMAN | 481 × 321 | 110,112 | 11,195 | 3.4 | 128,110 | 2.1 | 105,110 | 1.9 | 106,115 | 1.7 | 113,112 | 1 | 110,112 | 0 |
| MRI | 512 × 512 | 106,106 | 119,111 | 10 | 11,099 | 8.5 | 102,101 | 6.8 | 100,105 | 5.9 | 109,108 | 3.2 | 106,105 | 0.97 |
| SHIP | 360 × 256 | 105,127 | 121,126 | 8.4 | 117,128 | 6.1 | 118,123 | 5.4 | 115,125 | 4.3 | 112,128 | 3.3 | 105,127 | 0 |
| FIELD | 100 × 100 | 131,132 | 144,137 | 47.4 | 140,136 | 35.3 | 136,137 | 28.2 | 137,130 | 13.7 | 128,129 | 8 | 132,132 | 1.8 |
| TARGET | 552 × 381 | 150,150 | 158,143 | 11.6 | 145,162 | 5.5 | 152,162 | 3.4 | 153,161 | 1.1 | 157,151 | 0.86 | 153,152 | 0.39 |
| PISTOL | 320 × 240 | 7575 | 7469 | 1.7 | 8678 | 1.6 | 7981 | 1.2 | 7571 | 0.77 | 7177 | 0.56 | 7573 | 0.14 |
| PERSON | 320 × 236 | 104,112 | 121,111 | 1.4 | 111,118 | 0.93 | 105,108 | 0.73 | 109,113 | 0.52 | 101,111 | 0.19 | 104,112 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ye, Z.; Yang, J.; Wang, M.; Zong, X.; Yan, L.; Liu, W. 2D Tsallis Entropy for Image Segmentation Based on Modified Chaotic Bat Algorithm. Entropy 2018, 20, 239. https://0-doi-org.brum.beds.ac.uk/10.3390/e20040239
AMA Style
Ye Z, Yang J, Wang M, Zong X, Yan L, Liu W. 2D Tsallis Entropy for Image Segmentation Based on Modified Chaotic Bat Algorithm. Entropy. 2018; 20(4):239. https://0-doi-org.brum.beds.ac.uk/10.3390/e20040239
Chicago/Turabian StyleYe, Zhiwei, Juan Yang, Mingwei Wang, Xinlu Zong, Lingyu Yan, and Wei Liu. 2018. "2D Tsallis Entropy for Image Segmentation Based on Modified Chaotic Bat Algorithm" Entropy 20, no. 4: 239. https://0-doi-org.brum.beds.ac.uk/10.3390/e20040239
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.