1. Introduction
Discrete-time chaotic systems have been the center of attention in the fields of control [
1,
2] and secure communications in the last few years [
3,
4,
5,
6]. This attention can be attributed to two main characteristics. First, the chaotic nature of the dynamical systems, which seems random-like but is in fact completely determined and can be predicted once the initial conditions are known. For instance, this allows for the generation of pseudo–random sequences in secret or private-key encryption. The second interesting property is their discrete nature, which allows for simple implementation and reduced computational complexity. Among the well known discrete-time chaotic systems proposed throughout the years are the Hénon map [
7], the Lozi system [
8], the generalized Hénon map [
9] and the Baier–Klein system [
10].
In recent years, researchers have picked an interest in fractional discrete-time chaotic systems. These involve fractional calculus, where the differences in the system’s dynamics are fractional. Numerous studies have been dedicated to establishing a framework for fractional discrete calculus such as [
11,
12,
13,
14]. A good summary of the subject is given in [
15].
In general, chaotic systems became of interest in science and engineering in the early 1990s after synchronization was demonstrated. The earliest studies include [
16,
17,
18,
19]. Since then, various types of synchronization have been proposed in the literature including projective synchronization (PS) [
20], generalized synchronization (GS) [
21], full state hybrid projective synchronization (FSHPS) [
22], and many more. Some modification have also been made to these synchronization types leading, for instance, to inverse generalized synchronization (IGS) [
23] and inverse FSHPS (IFSHPS) [
24]. With the emergence of fractional chaotic maps such as the fractional Hénon map [
25] and the fractional generalized Hénon map [
26], the synchronization of such maps became of interest. Very few studies can be found on the subject including [
27,
28,
29,
30,
31,
32].
Naturally, curiosity grew as to the possibility of multiple synchronization types being achieved simultaneously for the states of the response system. This phenomenon is commonly referred to as the co-existence of synchronization types. Many studies can be found in the literature proposing linear and nonlinear control laws that give rise to the co-existence phenomenon for continuous-time integer-order systems [
33], continuous-time fractional systems [
34,
35,
36,
37,
38], and discrete-time integer-order systems [
39,
40,
41]. However, to the best of the authors’ knowledge, no such studies have been made for fractional-order discrete-time systems. This has motivated us to examine the phenomenon and develop suitable control laws for various types co-existing.
The next section of this paper describes the model for the drive and response systems and defines the necessary notation and synchronization types.
Section 3 presents the control law that guarantees the co-existence of PS, FSHPS, and GS as the control laws that establish the co-existence of IFSHPS and IGS.
Section 4 presents numerical examples that confirm the validity of the findings. Finally,
Section 6 summarizes the work carried out in this paper.
2. System Model
In order to establish the co-existence of different synchronization types in fractional order discrete-time chaotic systems, we consider the generic
n-dimensional drive and response pair of the form
where
represent the states of the drive and response systems, respectively,
are functions from
to
for
, and
denote control parameters to be identified by means of the synchronization strategy.
The notation
denotes the
–Caputo type delta difference of a function
with
[
12], which is of the form
for
is the fractional order,
, and
. In (
2), the
–th fractional sum of
is defined similar to [
11] as
with
,
. The term
denotes the falling function defined in terms of the Gamma function
as
Let us, now, define the types of synchronization with which we are interested in our study. The idea is to show that multiple types of synchronization may exist simultaneously for a pair of fractional-order discrete-time chaotic systems.
Definition 1. If there exists a controller and either constants , a matrix Φ, a map , a matrix Θ, or a map such that Note that in Definition 1 above, γ is a constant used to scale the master state vector. Matrices Φ and Θ represent linear transformation of the master and slave state vectors, respectively, and are usually referred to as scaling matrices. The terms ϕ and φ denote some arbitrary maps from towards . In general, these are nonlinear maps that represent scaling functions. We are now ready to present the main findings of our study.
3. Results
3.1. Co-existence of PS, FSHPS and GS
Let us consider the 2-dimensional drive system and a 3-dimensional response system given, respectively, by
and
where
is the linear part of the drive system,
are nonlinear functions, and
are controllers to be designed. Based on Definition 1, we may define the co-existence of PS, FSHPS and GS for the coupled systems (
5) and (
6) as follows.
Definition 2. It is said that PS, FSHPS and GS co-exist in the synchronization of the drive system (5) and the response systems (6) if there exist a controller, a constant, a constant matrix, and nonlinear mapsuch that the synchronization errorsall satisfy the asymptotic rule Remark 1. From the error system (7), it is obvious that states and are projective synchronized, is full state hybrid projective synchronized with and , and is generalized synchronized with and . We also need to state the following theorems, which are necessary for the proofs to come.
Theorem 1 ([
42])
. The zero equilibrium of the linear fractional-order discrete-time systemwhere and is asymptotically stable iffor all the eigenvalues λ of . Next, we propose control laws that achieve the co-existence rule (
7). Let us define the matrix
.
Theorem 2. PS, FSHPS and GS co-exist for the pair (5)–(6) subject towhere is a constant matrix chosen such that all the eigenvalues of satisfy Proof. The difference equations corresponding to the error system (
7) are given by
Substituting the system nonlinearities yields
Substituting the proposed control law (
11) in (
14) yields
In order to show that the zero solution of (
16) is globally asymptotically stable, we use the linearization method as described in Theorem 1. The error system (
15) can be written in the compact form
where
. According to condition (
12), it is easy to see that all the eigenvalues of the matrix
satisfy
and
for
. It, then, follows immediately from Theorem 1 that the zero solution of (
16) is globally asymptotically stable and consequently, systems (
5) and (
6) are synchronized in 3–dimensions according to Definition 2. ☐
3.2. Co-existence of IFSHPS and IGS
We, now, would like to achieve similar results for the inverse synchronization types listed in Definition 1. Consider the drive and response pair of the form
where
and
, are nonlinear functions, and
. Based on Definition 1, we can state what is meant by the co-existence of IFSHPS and IGS for (
17) as summarized in the following definition.
Definition 3. IFSHPS and IGS are said to co-exist in the synchronization of the pair (17) if there exist controllers , a constant matrix , and a map such that the synchronization errorsall satisfy the asymptotic rule Remark 2. From the error system (18), it is apparent that is inverse full state hybrid projective synchronized with , and , and that is inverse generalized synchronized with , and . Suppose that the function
φ can be factorized in the form
where
are real numbers and
is a nonlinear function. The error dynamics (
18) yield the difference equations
To simplify the equations, we can define
and
Using (
22) and (
23), (
21) may be written in the reduced form
or more compactly as
where
and
To establish the co-existence of IFSHPS and IGS, we assume that
M is invertible and denote its inverse by
. The control law is, then, given by
where
is a control matrix to be determined. Substituting (
27) into Equation (
25), we get
The following result follows in a similar manner to Theorem 2. The proof has been omitted as it can be inferred directly from that of Theorem 2.
Theorem 3. If the control matrix L is chosen such that all the eigenvalues of such that , then IFSHPS and IGS co-exist for (17) as described in (18) subject to control law (27). 4. Numerical Examples
We will now put the theoretical results presented in
Section 3 to the test. We consider the 2D fractional Hénon map proposed in [
25] as the drive system and the 2D fractional-order generalized Hénon map [
26] as the response system. The pair is described as
and
The linear and nonlinear parts of the drive system (
29) and the response system (
30) are given by, respectively,
and
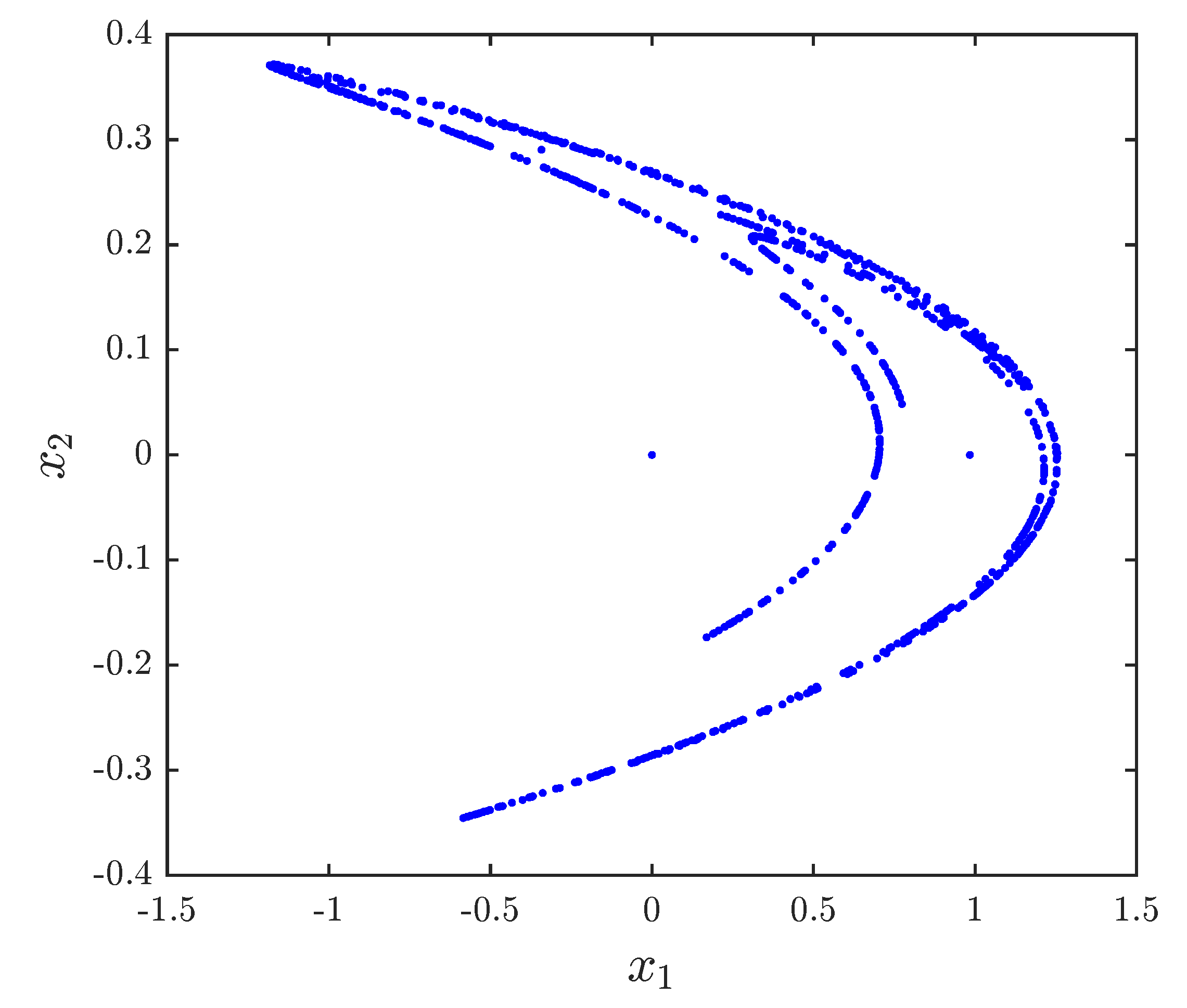
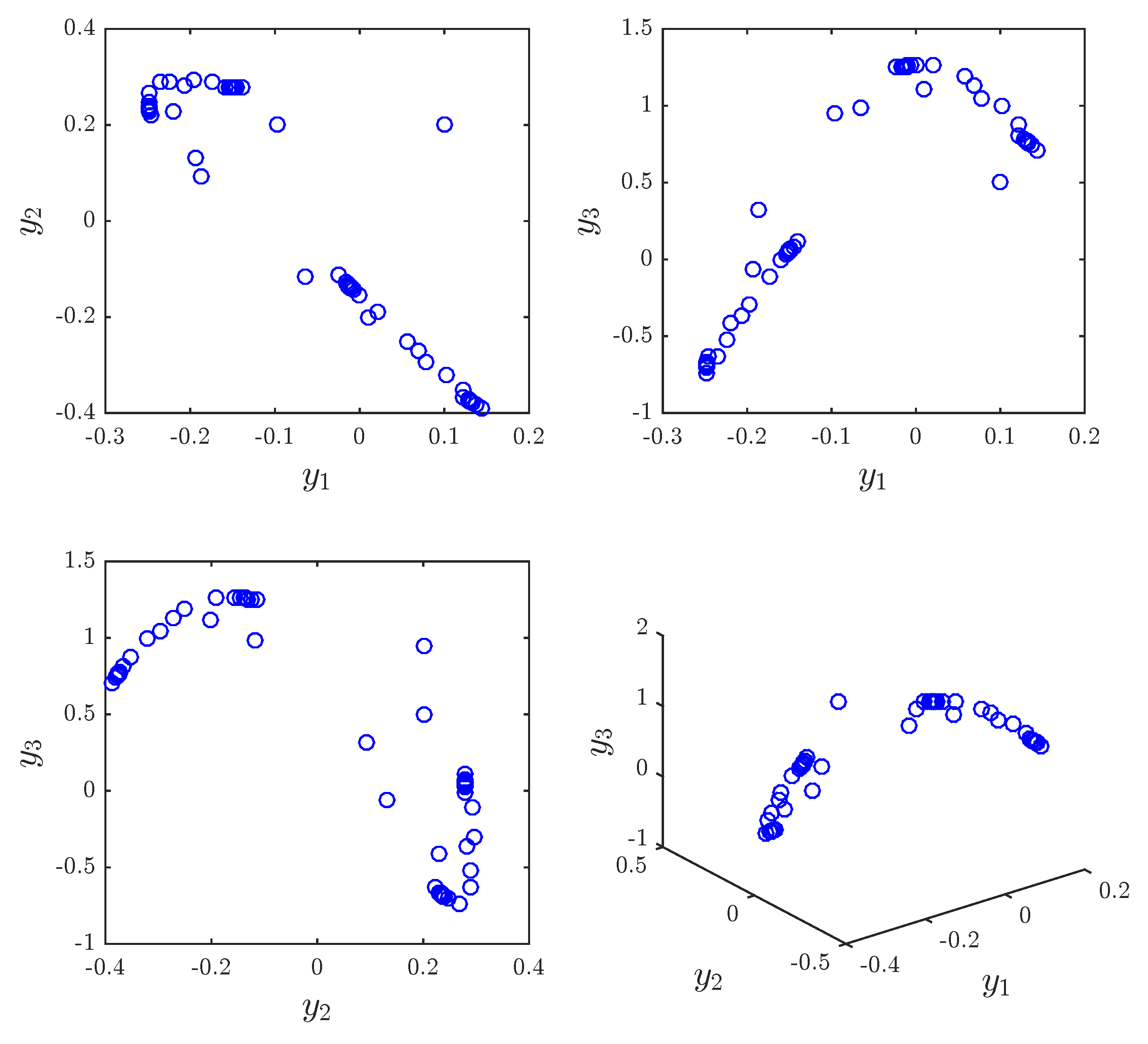
These two systems were proposed in the literature and shown to exhibit chaotic behaviors. For instance, when
,
,
and
.
Figure 1 and
Figure 2 show the chaotic trajectories of the drive system (
29) and response system (
29), respectively.
Previous research in information theory has established that entropy quantifies the rate of transfer or generation of information in a particular system. In general, Kolmogorov–Sinai (KS) entropy is applied to measure dynamical systems. A direct time–series approximation of the KS entropy was proposed in [
43] named ER entropy, which indicates the level of chaos in a particular system. Because calculating the exact ER entropy experimentally is difficult, an approximate entropy (ApEn) measure was introduced in [
44,
45]. Approximate entropy has been used to investigate chaotic systems recently [
46,
47].
In our work, the approximate entropy values of the drive and response systems have been calculated by using the reported scheme in [
44,
45]. As a brief summary of the approximation scheme, consider
N data samples generated by our fractional map
. The data is arranged in a sequence of vectors with an embedding dimension
m of the form
The distance between two distinct vectors
and
is denoted by
. We also define a threshold for our entropy calculation similar to [
44,
45] as
with std
being the standard deviation of
x. We, then, iterate over the regresser vectors and calculate the number of vectors
K that yield a distance
. The approximate entropy is, then, given by
where
The approximate entropy of the 2D fractional-order Hénon map is ApEn = 0.4159. The approximate entropy of the 2D fractional-order generalized Hénon map is ApEn = 0.0114. The results agree with trajectories illustrated in
Figure 1 and
Figure 2.
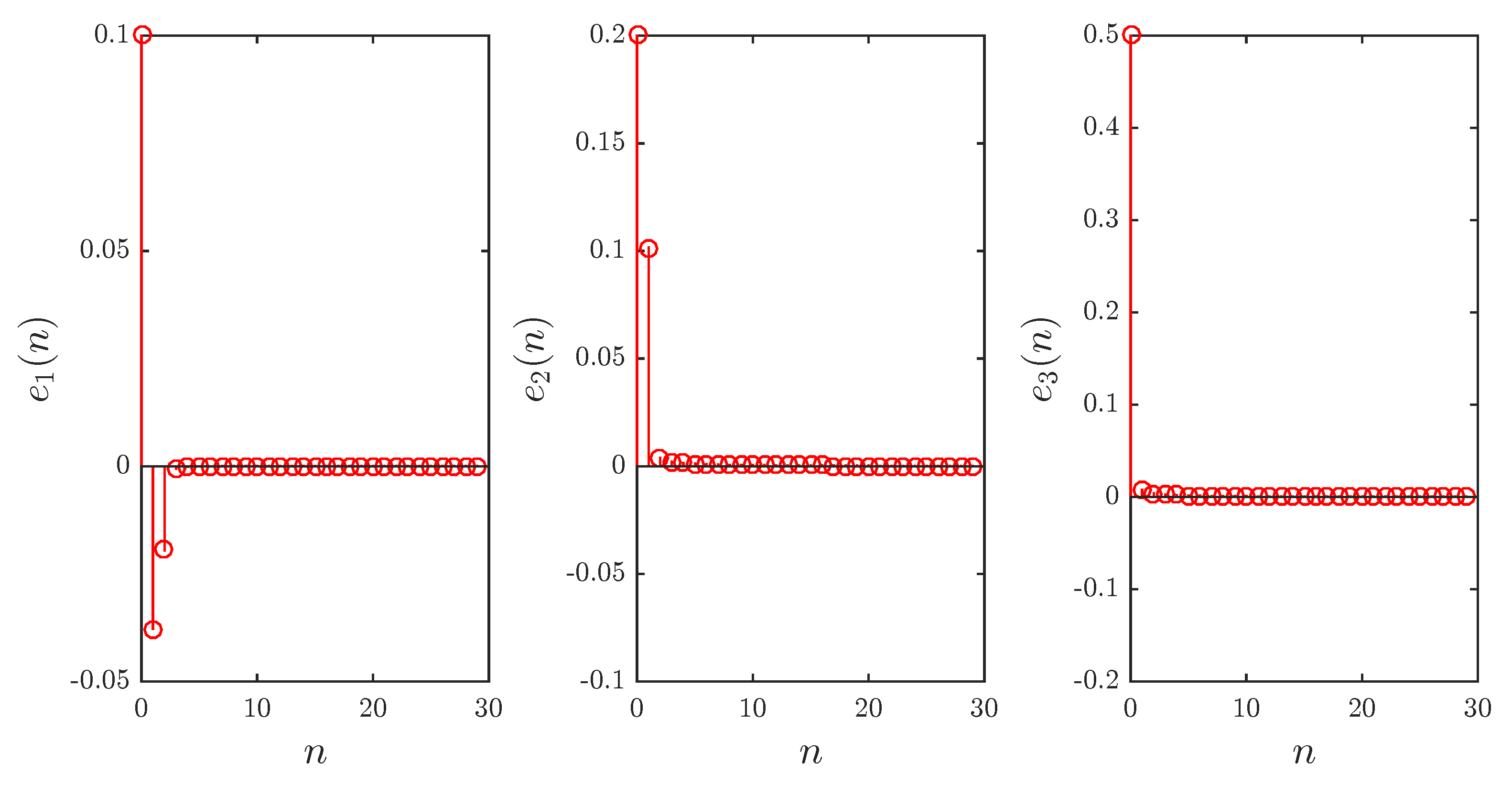
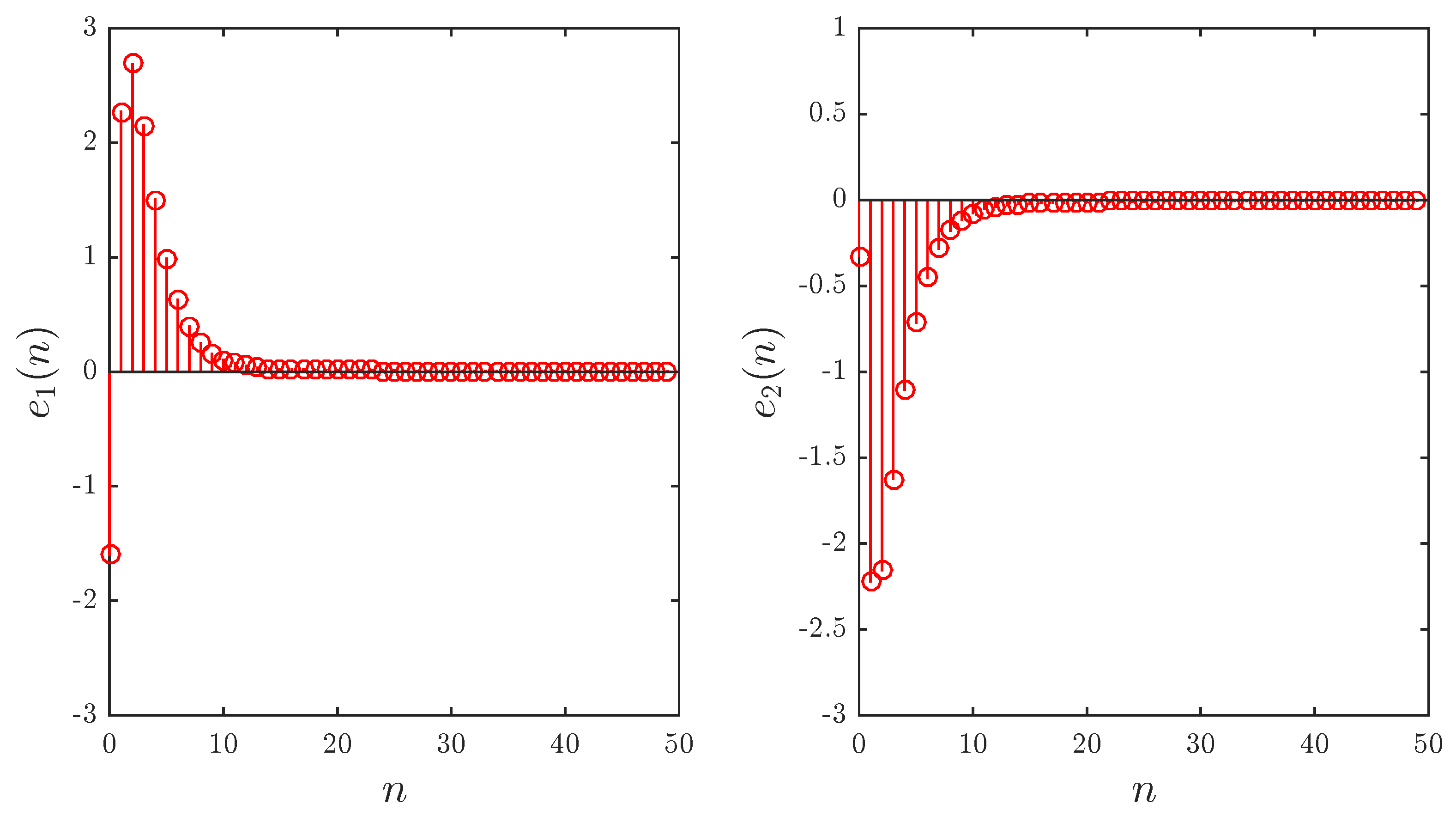
Example 1. The error system for the PS-FSHPS-GS synchronization scheme was described in Definition 2. We let Theorem 2 requires the selection of a control matrix C such that all the eigenvalues of satisfy condition (12). For instance, the control matrix C can be chosen as Simply, we can show that all eigenvalues of are: and therefor condition of Theorem 2 is satisfied. We can use the matrix C to construct the following controllers These controllers leads to the simplified error system Figure 3 shows the errors as functions of time for parameter sets and , starting point , fractional order , and initial errors . Clearly, the errors converge towards the zero solution implying that the three slave states are PS–FSHPS–GS synchronized. Example 2. The second case is concerned with the co-existence of IFSHPS and IGS in 2D. The error system is defined according to Definition 3 where Following the approach of Theorem 3, we start with a factorization of φ as It can be easily shown thatare sufficient. The proposed synchronization scheme rearranges Θ and into the matrixwhich is invertible with inverse Theorem 3 requires the choice of a matrix L. This may be achieved with The controllers can, thus, be constructed according to (27) based on and defined in (22) and (23), respectively. We end up withand Figure 4 depicts the stabilized states subject to parameter sets and , starting point , fractional order , and initial errors . It is easy to from Figure 4 that the errors converge towards zero in sufficient time proving that the controllers (45) in fact achieve IFSHPS–IGS synchronization for the pair (29). 5. Discussion
In this paper, we have presented novel results concerning the co-existence of multiple synchronization types in Caputo-type fractional chaotic maps. To the best of our knowledge, the topic of co-existence has not been considered before for this type of system, which motivated this research. The synchronization types considered are rather general, which allows for multiple applications, especially in the fields of secure communications and data encryption. In fact, as we mentioned before, very few studies can be found in the literature concerning the synchronization of fractional chaotic maps, which makes this work all the more interesting.
Perhaps the most interesting studies related to the subject are [
27,
28,
29,
30,
31,
32]. In [
27], the authors merely consider a pair of identical fractional logistic maps and propose a simple direct synchronization controller. In [
28], an identical synchronization scheme is proposed based on the results of [
48,
49]. The authors of [
29], again, consider the synchronization of identical fractional Hénon maps. The same can be said regarding [
32]. As for [
31], the authors propose a simple linear feedback controller suitable for a variety of maps. However, it is only shown to achieve complete synchronization, which is the most basic form of synchronization. In [
30], the fractional difference operator used is different from the one used here and thus comparison is difficult.
Generally speaking, it is difficult to compare our results to those reported in the above mentioned studies as the scope of our work is much wider. In addition, we are mainly concerned with co-existence, which has not been considered before for this type of systems.
6. Concluding Remarks
In this work, we have shown that different types of synchronization can co-exist for fractional-order discrete-time chaotic systems. We assumed a two dimensional drive system and a three dimensional response system. The main results of the study were two fold. First, we presented a nonlinear control scheme whereby PS, FSHPS, and GS are achieved simultaneously for the three states of the response system. The stability of the zero solution, and consequently the convergence of the synchronization error, was established by means of the stability theory of linear fractional-order discrete-time systems. The second main result concerns the co-existence of IFSHPS and IGS for the same drive-response pair. The three response states are simultaneously IFSHPS synchronized with the first drive state and IGS synchronized with the second drive state. Numerical results have confirmed the findings of the study. Simulations were carried out on Matlab to ensure that the errors converge to zero subject to the proposed control laws.
Author Contributions
Conceptualization, S.B. and A.O.; Formal analysis, X.W. and G.G.; Investigation, S.B.; Methodology, A.O. and V.-T.P.; Software, X.W., A.-A.K. and G.G.; Validation, V.V.H.; Writing – original draft, A.-A.K. and V.-T.P.; Writing – review & editing, V.V.H.
Funding
The author X.W. was supported by the National Natural Science Foundation of China (No. 61601306) and Shenzhen Overseas High Level Talent Peacock Project Fund (No. 20150215145C).
Conflicts of Interest
The authors declare no conflict of interest
References
- Kocarev, L.; Szczepanski, J.; Amigo, J.M.; Tomovski, I. Discrete Chaos–I: Theory. IEEE Trans. Circuits Syst. I Reg. Pap. 2006, 53, 1300–1309. [Google Scholar] [CrossRef]
- Li, C.; Song, Y.; Wang, F.; Liang, Z.; Zhu, B. Chaotic path planner of autonomous mobile robots based on the standard map for surveillance missions. Math. Prob. Eng. 2015, 2015, 263964. [Google Scholar] [CrossRef]
- Papadimitriou, S.; Bezerianosa, A.; Bountisb, T.; Pavlides, G. Secure communication protocols with discrete nonlinear chaotic maps. J. Syst. Archit. 2001, 47, 61–72. [Google Scholar] [CrossRef]
- Kwok, H.S.; Tang, W.K.S.; Man, K.F. Online secure chatting system using discrete chaotic map. Int. J. Bifurc. Chaos 2004, 14, 285. [Google Scholar] [CrossRef]
- Banerjee, S.; Kurth, J. Chaos and cryptography: A new dimension in secure communications. Eur. Phys. J. Spec. Top. 2014, 223, 1441–1445. [Google Scholar] [CrossRef]
- Fataf, N.A.A.; Mukherjee, S.; Said, M.R.M.; Rauf, U.F.A.; Hina, A.D.; Banerjee, S. Synchronization between two discrete chaotic systems for secure communications. In Proceedings of the 2016 IEEE Sixth International Conference on Communications and Electronics (ICCE), Ha Long, Vietnam, 27–29 July 2016; pp. 477–481. [Google Scholar]
- Hénon, M. A two-dimensional mapping with a strange attractor. Commun. Math. Phys. 1976, 50, 69–77. [Google Scholar]
- Lozi, R. Un atracteur étrange du type attracteur de Hénon. J. Physique 1978, 39, 9–10. [Google Scholar]
- Hitzl, D.L.; Zele, F. An exploration of the Hénon quadratic map. Phys. D Nonlinear Phenom. 1985, 14, 305–326. [Google Scholar] [CrossRef]
- Baier, G.; Sahle, S. Design of hyperchaotic flows. Phys. Rev. E 1995, 51, 2712–2714. [Google Scholar] [CrossRef]
- Atici, F.M.; Eloe, P.W. Discrete fractional calculus with the nabla operator. Electron. J. Qual. Theory Differ. Equ. 2009, 4, 1–12. [Google Scholar] [CrossRef]
- Abdeljawad, T. On Riemann and Caputo fractional differences. Comput. Math. Appl. 2011, 62, 1602–1611. [Google Scholar] [CrossRef]
- Abdeljawad, T.; Baleanu, D.; Jarad, F.; Agarwal, R.P. Fractional sums and differences with binomial coefficients. Discret. Dyn. Nat. Soc. 2013, 2013, 104173. [Google Scholar] [CrossRef]
- Baleanu, D.; Wu, G.; Bai, Y.; Chen, F. Stability analysis of Caputo–Like discrete fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 48, 520–530. [Google Scholar] [CrossRef]
- Goodrich, C.; Peterson, A.C. Discrete Fractional Calculus; Springer: Berlin, Germany, 2015. [Google Scholar]
- Yamada, T.; Fujisaca, H. Stability theory of synchronized motion in coupled-oscillator. Systems. II: The mapping approach. Prog. Theor. Phys. 1983, 70, 1240–1248. [Google Scholar] [CrossRef]
- Yamada, T.; Fujisaca, H. Stability theory of synchronized motion in coupled-oscillator Systems. III: Mapping model for continuous system. Prog. Theor. Phys. 1984, 72, 885–894. [Google Scholar] [CrossRef]
- Afraimovich, V.S.; Verochev, N.N.; Robinovich, M.I. Stochastic synchronization of oscillations in dissipative systems. RadioPhys. Quantum Electron. 1984, 29, 795–803. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carrol, T.L. Synchronization in chaotic systems. Phys. Rev. A 1990, 64, 821–824. [Google Scholar]
- Grassi, G.; Miller, D.A. Projective synchronization via a linear observer: Application to time-delay, continuous-time and discrete-time systems. Int. J. Bifurc. Chaos 2007, 17, 1337–1344. [Google Scholar] [CrossRef]
- Ouannas, A.; Odibat, Z. Generalized synchronization of different dimensional chaotic dynamical systems in discrete-time. Nonlinear Dyn. 2015, 81, 765–771. [Google Scholar] [CrossRef]
- Ouannas, A. On full state hybrid projective synchronization of general discrete chaotic systems. J. Nonlinear Dyn. 2014, 2014, 983293. [Google Scholar] [CrossRef]
- Ouannas, A. On inverse generalized synchronization of continuous chaotic dynamical systems. Int. J. Appl. Comp. Math. 2016, 2, 1–11. [Google Scholar] [CrossRef]
- Ouannas, A.; Grassi, G. Inverse full state hybrid projective synchronization for chaotic maps with different dimensions. Chin. Phys. B 2016, 25, 090503. [Google Scholar] [CrossRef]
- Hu, T. Discrete Chaos in Fractional Hénon Map. Appl. Math. 2014, 5, 2243–2248. [Google Scholar] [CrossRef]
- Shukla, M.K.; Sharma, B.B. Investigation of chaos in fractional order generalized hyperchaotic Hénon map. Int. J. Elec. Comm. 2017, 78, 265–273. [Google Scholar] [CrossRef]
- Wu, G.; Baleanu, D. Chaos synchronization of the discrete fractional logistic map. Signal Process. 2014, 102, 96–99. [Google Scholar] [CrossRef]
- Wu, G.; Baleanu, D.; Xie, H.; Chen, F. Chaos synchronization of fractional chaotic maps based on the stability condition. Physica A 2016, 460, 374–383. [Google Scholar] [CrossRef]
- Liu, Y. Chaotic synchronization between linearly coupled discrete fractional Hénon maps. Indian J. Phys. 2016, 90, 313–317. [Google Scholar] [CrossRef]
- Megherbi, O.; Hamiche, H.; Djennoune, S.; Bettayeb, M. A new contribution for the impulsive synchronization of fractional-order discrete-time chaotic systems. Nonlinear Dyn. 2017, 90, 1519–1533. [Google Scholar] [CrossRef]
- Xin, B.; Liu, L.; Hou, G.; Ma, Y. Chaos synchronization of nonlinear fractional discrete dynamical systems via linear control. Entropy 2017, 19, 351. [Google Scholar] [CrossRef]
- Khennaoui, A.A.; Ouannas, A.; Bendoukha, S.; Wang, X.; Pham, V.T. On chaos in the fractional-order discrete-time unified system and its control synchronization. Entropy 2018, 20, 530. [Google Scholar] [CrossRef]
- Ouannas, A.; Azar, A.T.; Sundarapandian, A.V. New hybrid synchronization schemes based on coexistence of various types of synchronization between master-slave hyperchaotic systems. Int. J. Comp. Apps. Tech. 2017, 55, 112–120. [Google Scholar] [CrossRef]
- Ouannas, A.; Abdelmalek, S.; Bendoukha, S. Coexistence of some chaos synchronization types in fractional-order differential equations. Electron. J. Differ. Equ. 2017, 2017, 1–15. [Google Scholar]
- Ouannas, A.; Odibat, Z.; Hayat, T. Fractional analysis of co-existence of some types of chaos synchronization. Chaos Solitons Fractals 2017, 105, 215–223. [Google Scholar] [CrossRef]
- Ouannas, A.; Wang, X.; Pham, V.T.; Grassi, G.; Ziar, T. Coexistence of identical synchronization, antiphase synchronization and inverse full state hybrid projective synchronization in different dimensional fractional-order chaotic systems. Adv. Differ. Equ. 2018, 2018, 35. [Google Scholar] [CrossRef] [Green Version]
- Ouannas, A.; Wang, X.; Pham, V.T.; Ziar, T. Dynamic analysis of complex synchronization scheme between integer-order and fractional-order chaotic systems with different dimensions. Complexity 2017, 2017, 1–12. [Google Scholar] [CrossRef]
- Ouannas, A.; Zehrour, O.; Laadjal, Z. Nonlinear methods to control synchronization between fractional-order and integer-order chaotic systems. Nonlinear Stud. 2018, 25, 1–13. [Google Scholar]
- Ouannas, A.; Azar, A.T.; Abu-Saris, R. A new type of hybrid synchronization between arbitrary hyperchaotic maps. Int. J. Mach. Learn. Cyb. 2017, 8, 1–8. [Google Scholar] [CrossRef]
- Ouannas, A. Co-existence of various types of synchronization between hyperchaotic maps. Nonlinear Dyn. Syst. Theory 2016, 16, 312–321. [Google Scholar]
- Ouannas, A.; Grassi, G. A new approach to study co-existence of some synchronization types between chaotic maps with different dimensions. Nonlinear Dyn. 2016, 86, 1319–1328. [Google Scholar] [CrossRef]
- Cermak, J.; Gyori, I.; Nechvatal, L. On explicit stability condition for a linear fractional difference system. Fract. Calc. Appl. Anal. 2015, 18, 651–672. [Google Scholar] [CrossRef]
- Eckmann, J.P.; Ruelle, D. Ergodic theory of chaos and strange attractors. Rev. Mod. Phys. 1985, 57, 617. [Google Scholar] [CrossRef]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed]
- Pincus, S. Approximate entropy (ApEn) as a complexity measure. Chaos Interdiscipl. J. Nonlinear Sci. 1995, 5, 110–117. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.H.; Shekofteh, Y.; Akgal, A.; Li, C.B.; Panahi, S.A. New chaotic system with a self-excited attractor: Entropy measurement, signal encryption, and parameter estimation. Entropy 2018, 20, 86. [Google Scholar] [CrossRef]
- Wang, C.; Ding, Q. A new two-dimensional map with hidden attractors. Entropy 2018, 20, 322. [Google Scholar] [CrossRef]
- Abu-Saris, R.; Al-Mdallal, Q. On the asymptotic stability of linear system of fractional order difference equations. Fract. Calc. Appl. Anal. 2013, 16, 613–629. [Google Scholar] [CrossRef]
- Mozyrska, D.; Wyrwas, M. The Z–transform method and Delta type fractional difference operators. Discrete Dyn. Nat. Soc. 2013, 2013, 852734. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}



