A Novel Technique for Achieving the Approximated ISI at the Receiver for a 16QAM Signal Sent via a FIR Channel Based Only on the Received Information and Statistical Techniques


Abstract
:1. Introduction
2. The Systematic Approach for Getting the Approximated Initial ISI
- The input sequence is a 16QAM source (a modulation using ± {1,3} levels for in-phase and quadrature components) which can be written as where and are the real and imaginary parts of respectively. and are independent and .
- The unknown channel is a possibly nonminimum phase linear time-invariant filter in which the transfer function has no “deep zeros”; namely, the zeros lie sufficiently far from the unit circle.
- The filter is a tap-delay line.
- The channel noise is an additive Gaussian white noise.
- CH1
- (initial ISI = 0.88): The channel parameters are determined according to [23]:
- CH2
- (initial ISI = 1.402): The channel parameters are determined according to [24]:
- CH3
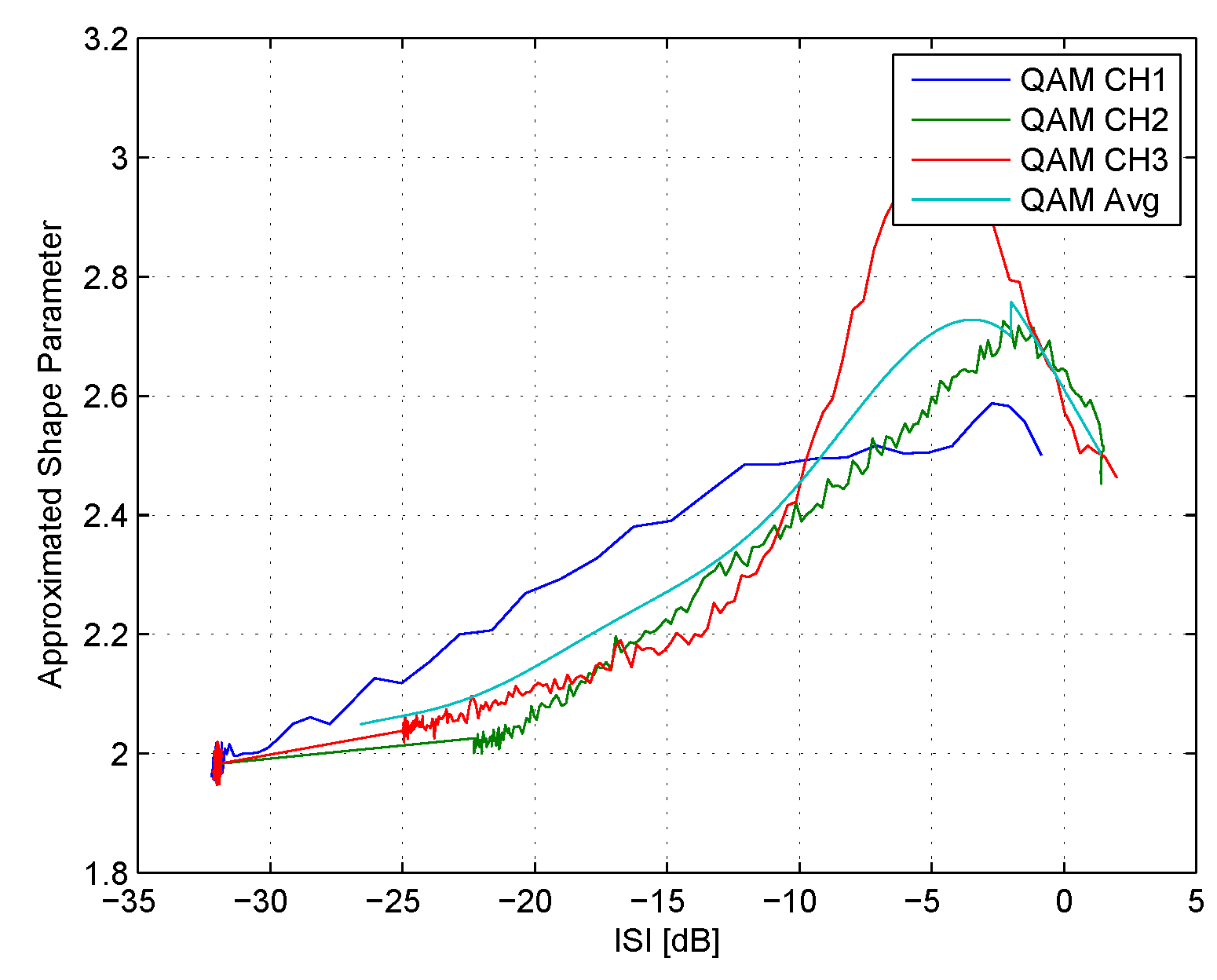
- (initial ISI = 1.715): The channel parameters are based on the carrier serving ares (CSA), loop 1 given in [25], which were down decimated by 32 and normalized so that :The step-size parameter was set for channel CH1, CH2 and CH3 to , and respectively. The equalizer’s tap length N was set for channel CH1, CH2 and CH3 to 15, 21 and 57 respectively. Based on the approximated average curve (“Avg”) for the three channels as a function of the residual ISI in units, the coefficients of a polynomial of degree four that fit the approximated shape parameter best in a least-squares sense were obtained via the polyfit function from the Matlab software. Thus, we obtained the approximated shape parameter as a polynomial function of the residual ISI in units which is given in (15).
3. Simulation
- CH1
- (Initial ISI = 0.88): The channel parameters are determined according to [23]:
- CH2
- (Initial ISI = 1.402): The channel parameters are determined according to [24]:
- CH3
- (Initial ISI = 1.715): The channel parameters are based on the carrier serving area (CSA) loop 1 given in [25] which were down decimated by 32 and normalized so that :
- CH4
- (Initial ISI = 0.389): The channel parameters are determined according to:
- CH5
- (Initial ISI = 0.73): The channel parameters are determined according to:
- CH6
- (Initial ISI = 1): The channel parameters are determined according to:
- CH7
- (Initial ISI = 0.41): The channel parameters are determined according to:
- CH8
- (Initial ISI = 1.13): The channel parameters are determined according to:
- CH9
- (Initial ISI = 1.395): The channel parameters are determined according to:
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ISI | Inter-Symbol-Interference |
| GGD | Generalized Gaussian Distribution |
| FIR | Finite Impulse Response |
| SIMO | Single Input Multiple Output |
| 16QAM | 16 Quadrature Amplitude Modulation |
| Probability Density Function | |
| CSA | Carrier Serving Area |
References
- Johnson, R.C.; Schniter, P.; Endres, T.J.; Behm, J.D.; Brown, D.R.; Casas, R.A. Blind Equalization Using the Constant Modulus Criterion: A Review. Proc. IEEE 1998, 86, 1927–1950. [Google Scholar] [CrossRef] [Green Version]
- Moazzen, I.; Doost-Hoseini, A.M.; Omidi, M.J. A novel blind frequency domain equalizer for SIMO systems. In Proceedings of the 2009 International Conference on Wireless Communications and Signal Processing, Nanjing, China, 13–15 November 2009; pp. 1–6. [Google Scholar]
- Peng, D.; Xiang, Y.; Yi, Z.; Yu, S. CM-Based Blind Equalization of Time-Varying SIMO-FIR Channel With Single Pulsation Estimation. IEEE Trans. Veh. Technol. 2011, 60, 5. [Google Scholar] [CrossRef]
- Coskun, A.; Kale, I. Blind Multidimensional Matched Filtering Techniques for Single Input Multiple Output Communications. IEEE Trans. Instrum. Meas. 2010, 59, 5. [Google Scholar] [CrossRef]
- Chen, S.; Wolfgang, A.; Hanzo, L. Constant Modulus Algorithm Aided Soft Decision Directed Scheme for Blind Space-Time Equalization of SIMO Channels. Signal Process. 2007, 87, 2587–2599. [Google Scholar] [CrossRef] [Green Version]
- Channel Equalization and Source Separation: Unsupervised Signal Processing. Available online: http://books.google.co.il/books?id=bimBH2czOZ0C (accessed on 2 January 2020).
- Pinchas, M. A closed-form approximated expression for the achievable residual ISI obtained by blind adaptive equalizers in a SIMO FIR channel. In Proceedings of the 2012 IEEE 27th Convention of Electrical and Electronics Engineers, Eilat, Israel, 14–17 November 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Pinchas, M. Symbol Error Rate as a Function of the Residual ISI Obtained by Blind Adaptive Equalizers for the SIMO and Fractional Gaussian Noise Case. Math. Probl. Eng. 2013, 2013, 860389. [Google Scholar] [CrossRef] [Green Version]
- Pinchas, M. New Lagrange Multipliers for the Blind Adaptive Deconvolution Problem Applicable for the Noisy Case. Entropy 2016, 18, 65. [Google Scholar] [CrossRef] [Green Version]
- Haykin, S. Adaptive Filter Theory. In Blind Deconvolution; Haykin, S., Ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991; Chapter 20. [Google Scholar]
- Godfrey, R.; Rocca, F. Zero memory non-linear deconvolution. Geophys. Prospect. 1981, 29, 189–228. [Google Scholar] [CrossRef]
- Pinchas, M.; Bobrovsky, B.Z. A Maximum Entropy approach for blind deconvolution. Signal Process. 2006, 86, 2913–2931. [Google Scholar] [CrossRef]
- Pinchas, M. A New Efficient Expression for the Conditional Expectation of the Blind Adaptive Deconvolution Problem Valid for the Entire Range ofSignal-to-Noise Ratio. Entropy 2019, 21, 72. [Google Scholar] [CrossRef] [Green Version]
- Jumarie, G. Nonlinear filtering. A weighted mean squares approach and a Bayesian one via the Maximum Entropy principle. Signal Process. 1990, 21, 323–338. [Google Scholar] [CrossRef]
- Papulis, A. Probability, Random Variables, and Stochastic Processes, 2nd ed.; International Edition; McGraw-Hill: New York, NY, USA, 1984; Chapter 15; p. 536. [Google Scholar]
- Armando Domínguez-molina, J.; González-farías, G.; Rodríguez-dagnino, R.M. A Practical Procedure to Estimate the Shape Parameter in the Generalized Gaussian Distribution. Available online: https://www.cimat.mx/reportes/enlinea/I-01-18_eng.pdf (accessed on 30 June 2019).
- Assaf, S.A.; Zirkle, L.D. Approximate analysis of nonlinear stochastic systems. Int. J. Control 1976, 23, 477–492. [Google Scholar] [CrossRef] [Green Version]
- Bover, D.C.C. Moment equation methods for nonlinear stochastic systems. J. Math. Anal. Appl. 1978, 65, 306–320. [Google Scholar] [CrossRef] [Green Version]
- Pinchas, M.; Bobrovsky, B.Z. A Novel HOS Approach for Blind Channel Equalization. IEEE Trans. Wirel. Commun. 2007, 6, 875–886. [Google Scholar] [CrossRef]
- Orszag, S.A.; Bender, C.M. Advanced Mathematical Methods for Scientist Engineers International Series in Pure and Applied Mathematics; McDraw-Hill: New York, NY, USA, 1978; Chapter 6. [Google Scholar]
- Nandi, A.K. Blind Estimation Using Higher-Order Statistics; Kluwer Academic: Boston, MA, USA, 1999. [Google Scholar]
- Godard, D.N. Self recovering equalization and carrier tracking in two-dimenional data communication system. IEEE Trans. Comm. 1980, 28, 1867–1875. [Google Scholar] [CrossRef] [Green Version]
- Pinchas, M. A Closed Approximated Formed Expression for the Achievable Residual Intersymbol Interference Obtained by Blind Equalizers. Signal Process. 2010, 90, 1940–1962. [Google Scholar] [CrossRef]
- Lazaro, M.; Santamaria, I.; Erdogmus, D.; Hild, K.E.; Pantaleon, C.; Principe, J.C. Stochastic blind equalization based on pdf fitting using parzen estimator. IEEE Trans. Signal Process. 2005, 53, 696–704. [Google Scholar] [CrossRef]
- Matlab DMTTEQ Toolbox 3.0 Release. Available online: http://users.ece.utexas.edu/~bevans/projects/adsl/dmtteq/dmtteq.html (accessed on 2 April 2020).
- SPIEGEL, M.R. Mathematical Handbook of Formulas and Tables, SCHAUM’S Outline Series; McGRAW-HILL: New York, NY, USA; St. Louis, MI, USA; San-Franscisco, CA, USA; Toronto, ON, Canada; Sydney, Australia, 1968. [Google Scholar]
- Welti, A.L.; Bobrovsky, B.Z. Mean time to lose lock for a coherent second-order PN-code tracking loop-the singular perturbation approach. IEEE J. Sel. Areas Comm. 1990, 8, 809–818. [Google Scholar] [CrossRef]
- Bobrovsky, B.Z.; Schuss, Z. A singular perturbation approach for the computation of the mean first passage time in a nonlinear filter. SIAM J. Appl. Math. 1982, 42, 174–187. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Q = 0.2; K = 2000; Noiseless Case | ||
|---|---|---|
| CH1 | 1.1271 | 0.88 |
| CH2 | 1.3604 | 1.402 |
| CH3 | 1.5219 | 1.715 |
| Q = 0.2; K = 2000; SNR = 30 dB | ||
|---|---|---|
| CH1 | 1.1241 | 0.88 |
| CH2 | 1.3916 | 1.402 |
| CH3 | 1.5505 | 1.715 |
| Q = 0.2; K = 2000; SNR = 20 dB | ||
|---|---|---|
| CH1 | 1.1355 | 0.88 |
| CH2 | 1.3798 | 1.402 |
| CH3 | 1.5166 | 1.715 |
| Q = 0.2; K = 4000; SNR = 20 dB | ||
|---|---|---|
| CH1 | 1.2199 | 0.88 |
| CH2 | 1.4019 | 1.402 |
| CH3 | 1.5559 | 1.715 |
| Q = 0.2; K = 10,000; SNR = 20 dB | ||
|---|---|---|
| CH1 | 1.2217 | 0.88 |
| CH2 | 1.4153 | 1.402 |
| CH3 | 1.5684 | 1.715 |
| Q = 0.26; K = 2000; SNR = 30 dB | ||
|---|---|---|
| CH1 | 0.8728 | 0.88 |
| CH9 | 1.3986 | 1.395 |
| Q = 0.26; K = 2000; SNR = 20 dB | ||
|---|---|---|
| CH1 | 0.9358 | 0.88 |
| CH9 | 1.4036 | 1.395 |
| Q = 0.46; K = 2000; SNR = 30 dB | ||
|---|---|---|
| CH4 | 0.3302 | 0.389 |
| CH5 | 0.7478 | 0.73 |
| Q = 0.46; K = 2000; SNR = 20 dB | ||
|---|---|---|
| CH4 | 0.3832 | 0.389 |
| CH5 | 0.7471 | 0.73 |
| Q = 0.34; K = 2000; SNR = 30 dB | ||
|---|---|---|
| CH6 | 1.0763 | 1 |
| CH8 | 1.0938 | 1.13 |
| Q = 0.34; K = 2000; SNR = 20 dB | ||
|---|---|---|
| CH6 | 1.0792 | 1 |
| CH8 | 1.0966 | 1.13 |
| Q = 0.35; K = 2000; SNR = 30 dB | ||
|---|---|---|
| CH6 | 1.0461 | 1 |
| CH8 | 1.0631 | 1.13 |
| Q = 0.35; K = 2000; SNR = 20 dB | ||
|---|---|---|
| CH6 | 1.0489 | 1 |
| CH8 | 1.0658 | 1.13 |
| Q = 0.76; K = 2000; SNR = 30 dB | ||
|---|---|---|
| CH7 | 0.4085 | 0.41 |
| Q = 0.76; K = 2000; SNR = 20 dB | ||
|---|---|---|
| CH7 | 0.4162 | 0.41 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goldberg, H.; Pinchas, M. A Novel Technique for Achieving the Approximated ISI at the Receiver for a 16QAM Signal Sent via a FIR Channel Based Only on the Received Information and Statistical Techniques. Entropy 2020, 22, 708. https://0-doi-org.brum.beds.ac.uk/10.3390/e22060708
Goldberg H, Pinchas M. A Novel Technique for Achieving the Approximated ISI at the Receiver for a 16QAM Signal Sent via a FIR Channel Based Only on the Received Information and Statistical Techniques. Entropy. 2020; 22(6):708. https://0-doi-org.brum.beds.ac.uk/10.3390/e22060708
Chicago/Turabian StyleGoldberg, Hadar, and Monika Pinchas. 2020. "A Novel Technique for Achieving the Approximated ISI at the Receiver for a 16QAM Signal Sent via a FIR Channel Based Only on the Received Information and Statistical Techniques" Entropy 22, no. 6: 708. https://0-doi-org.brum.beds.ac.uk/10.3390/e22060708