
Experimental Investigation and Fault Diagnosis for Buckled Wet Clutch Based on Multi-Speed Hilbert Spectrum Entropy


Abstract
:1. Introduction
2. Preliminaries and Bench Test
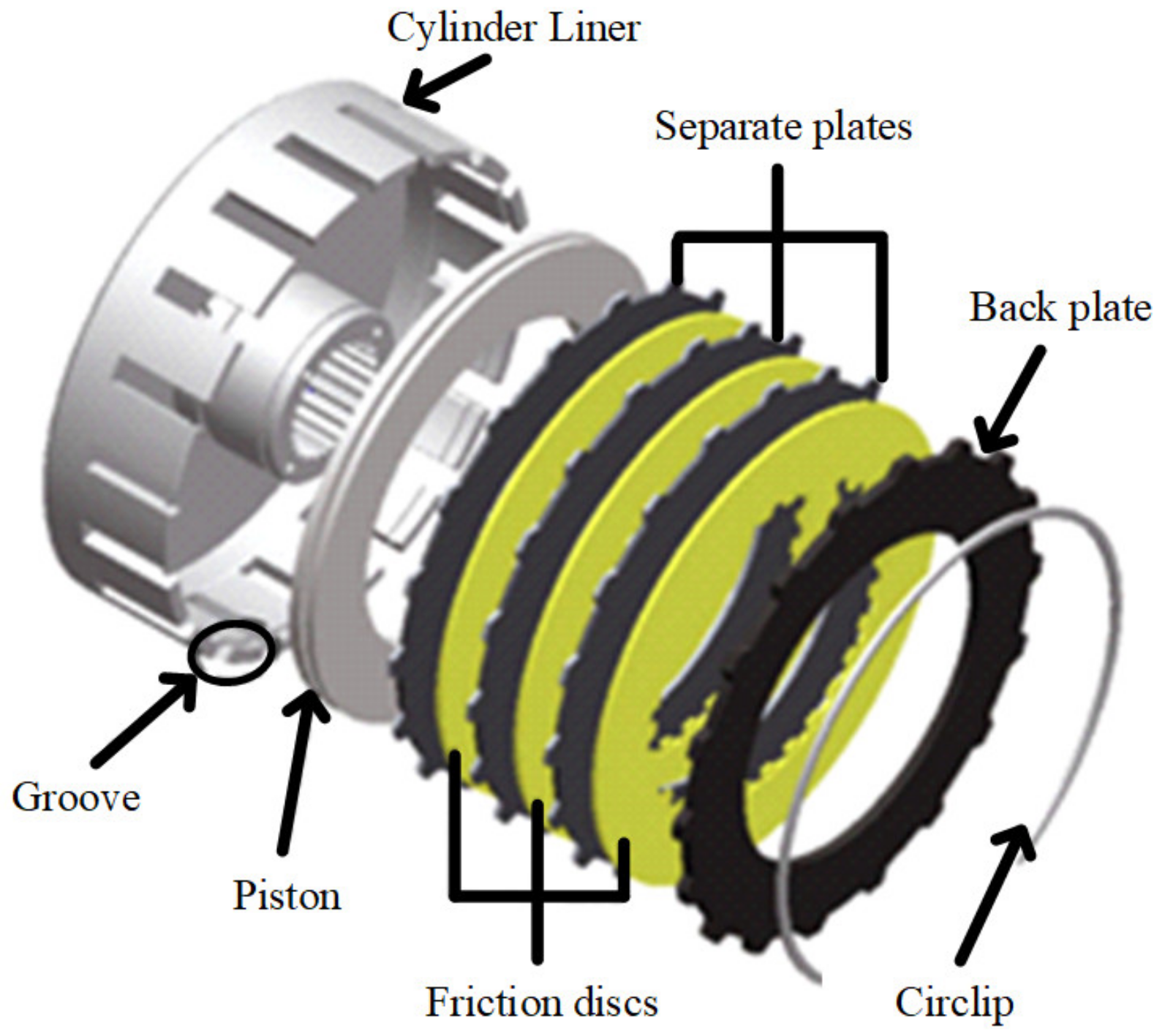
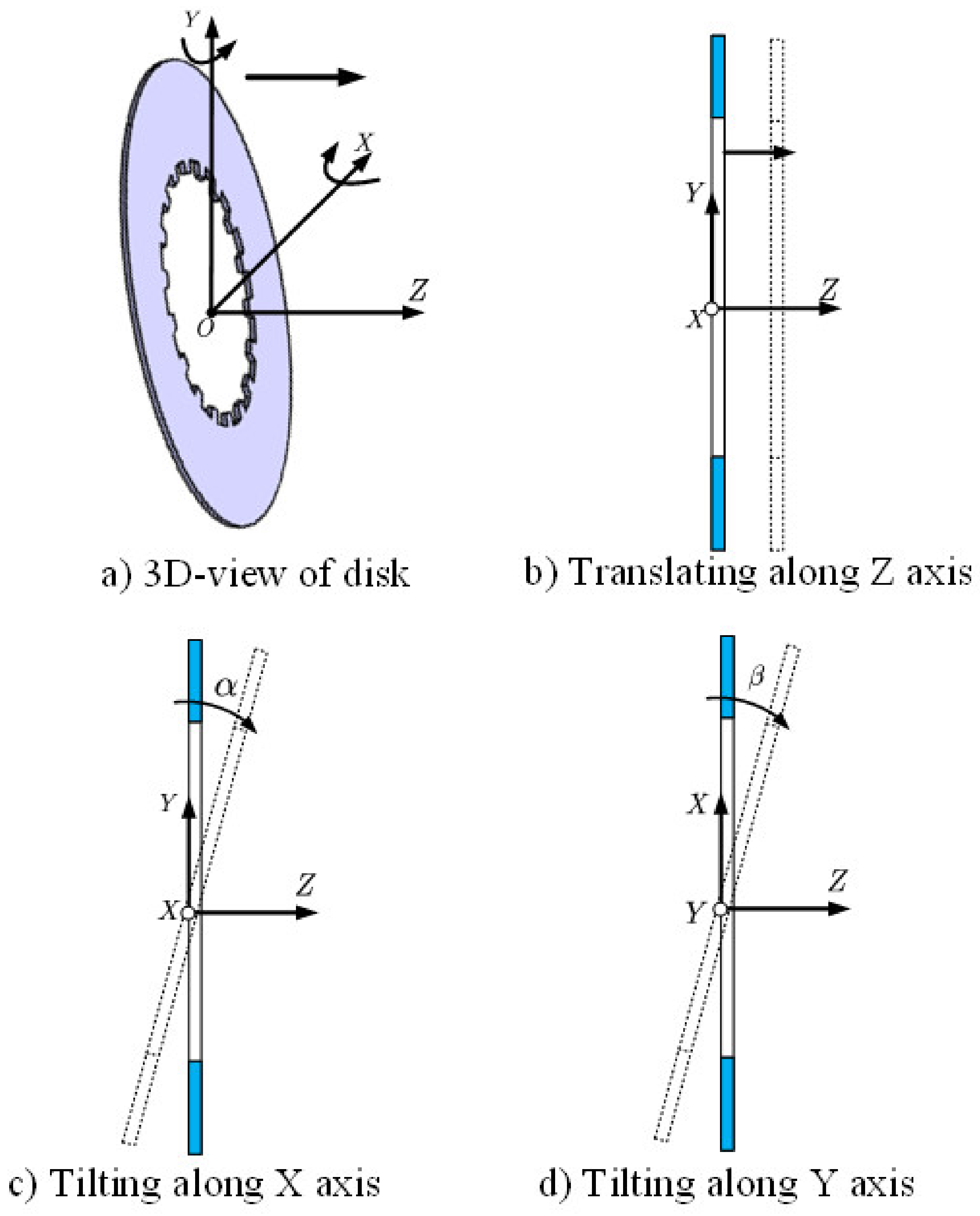
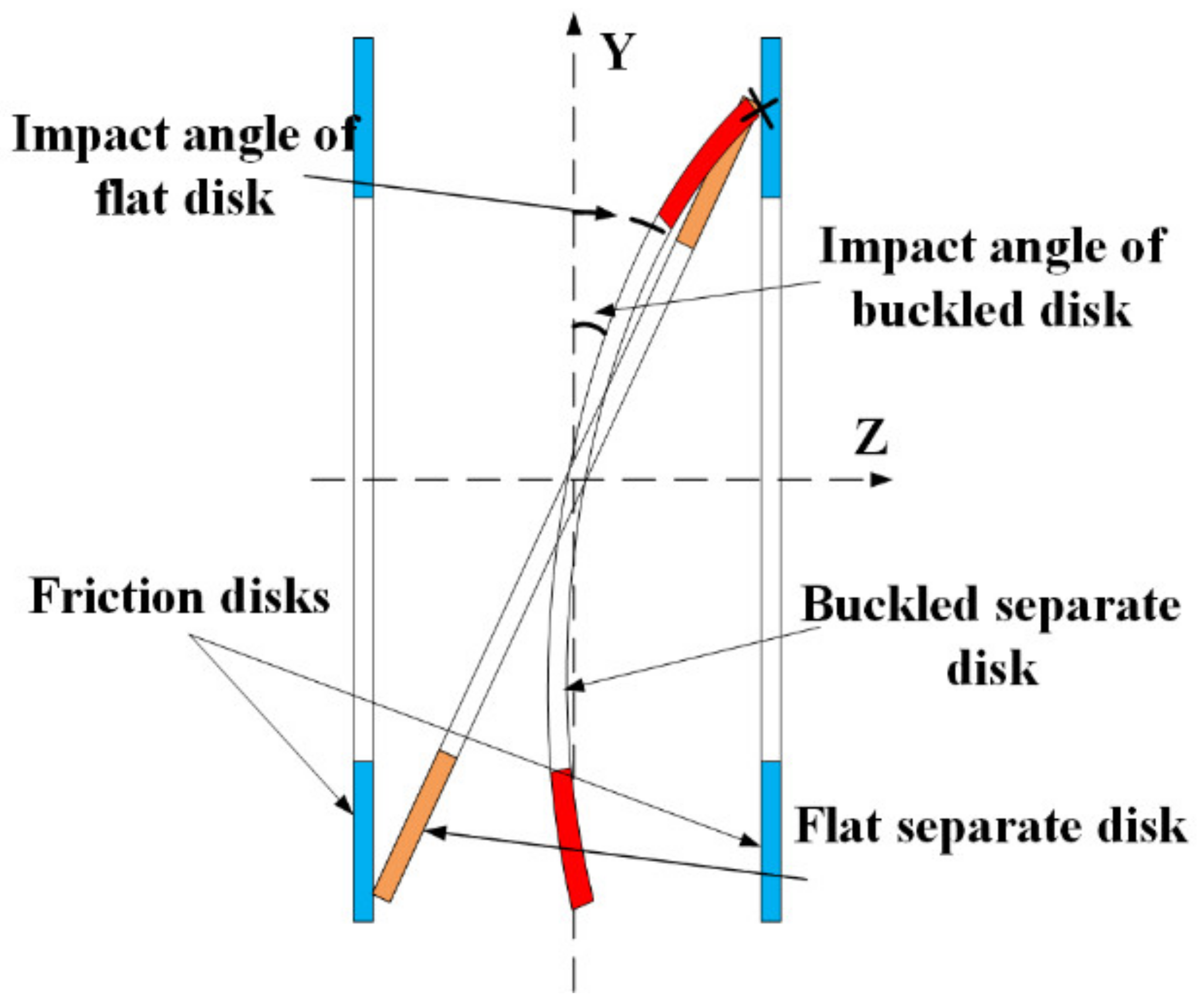
2.1. Wobbling and Rub Impact of the Disks in the Wet Clutch
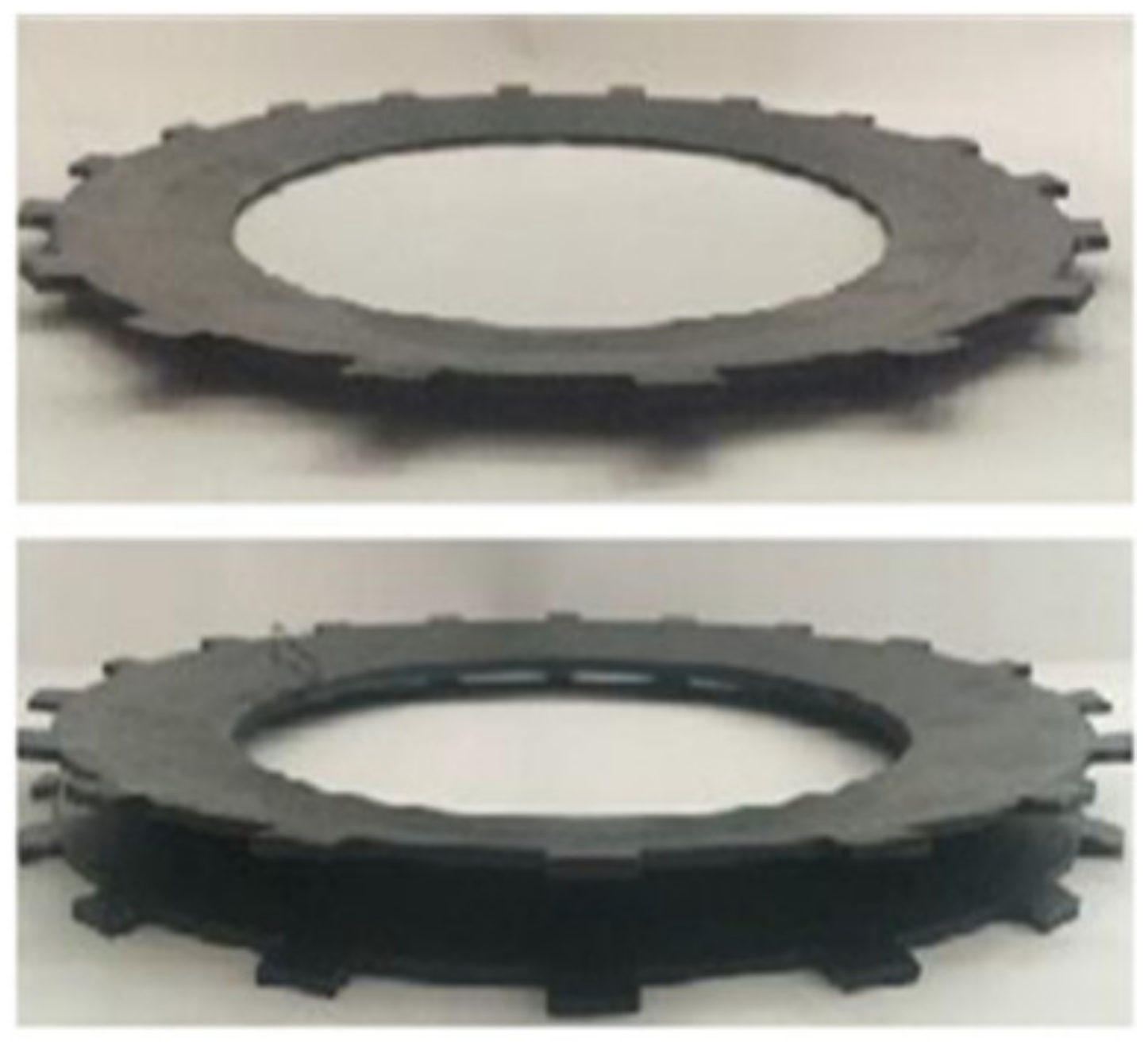
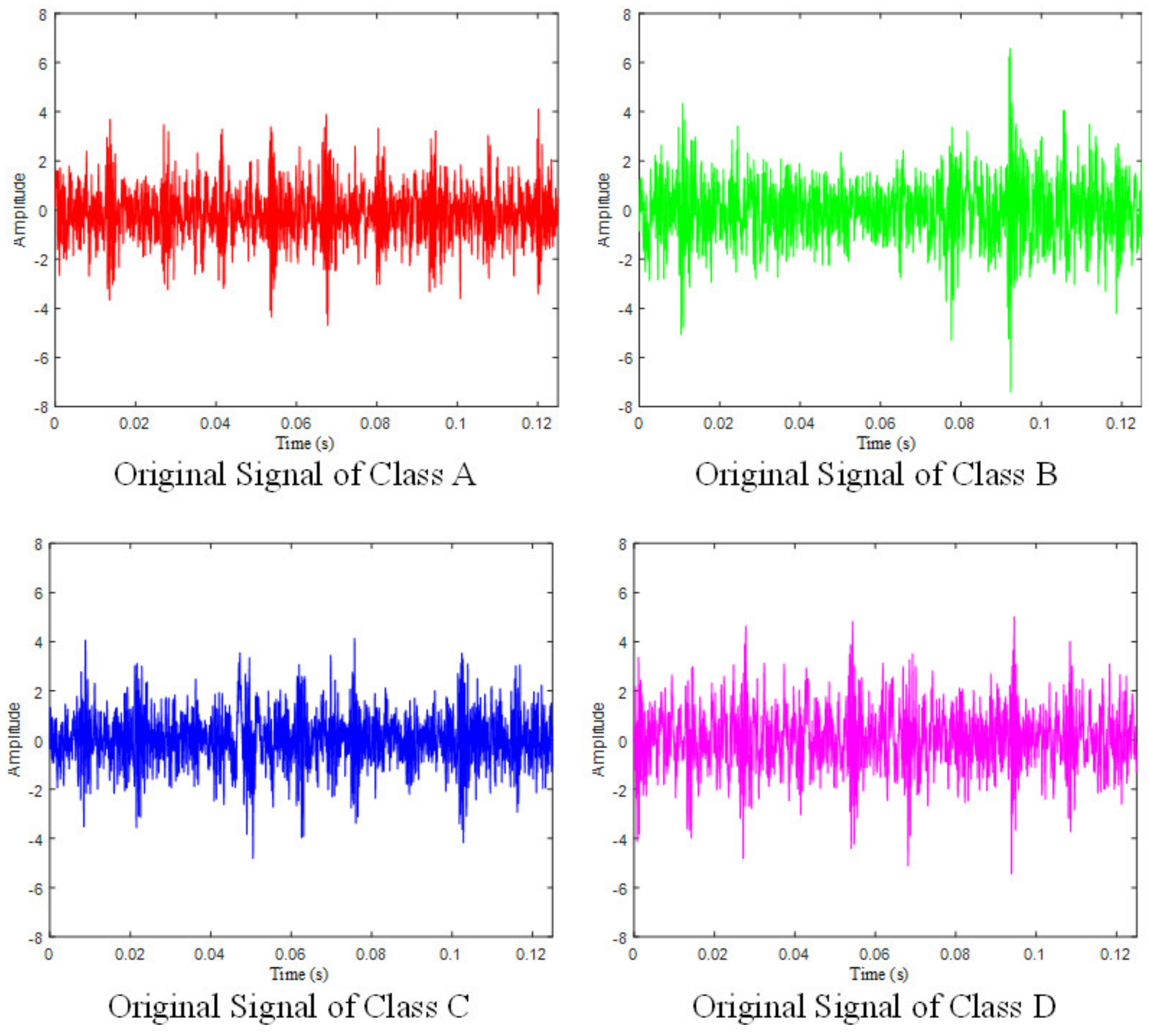
2.2. Health State Classification
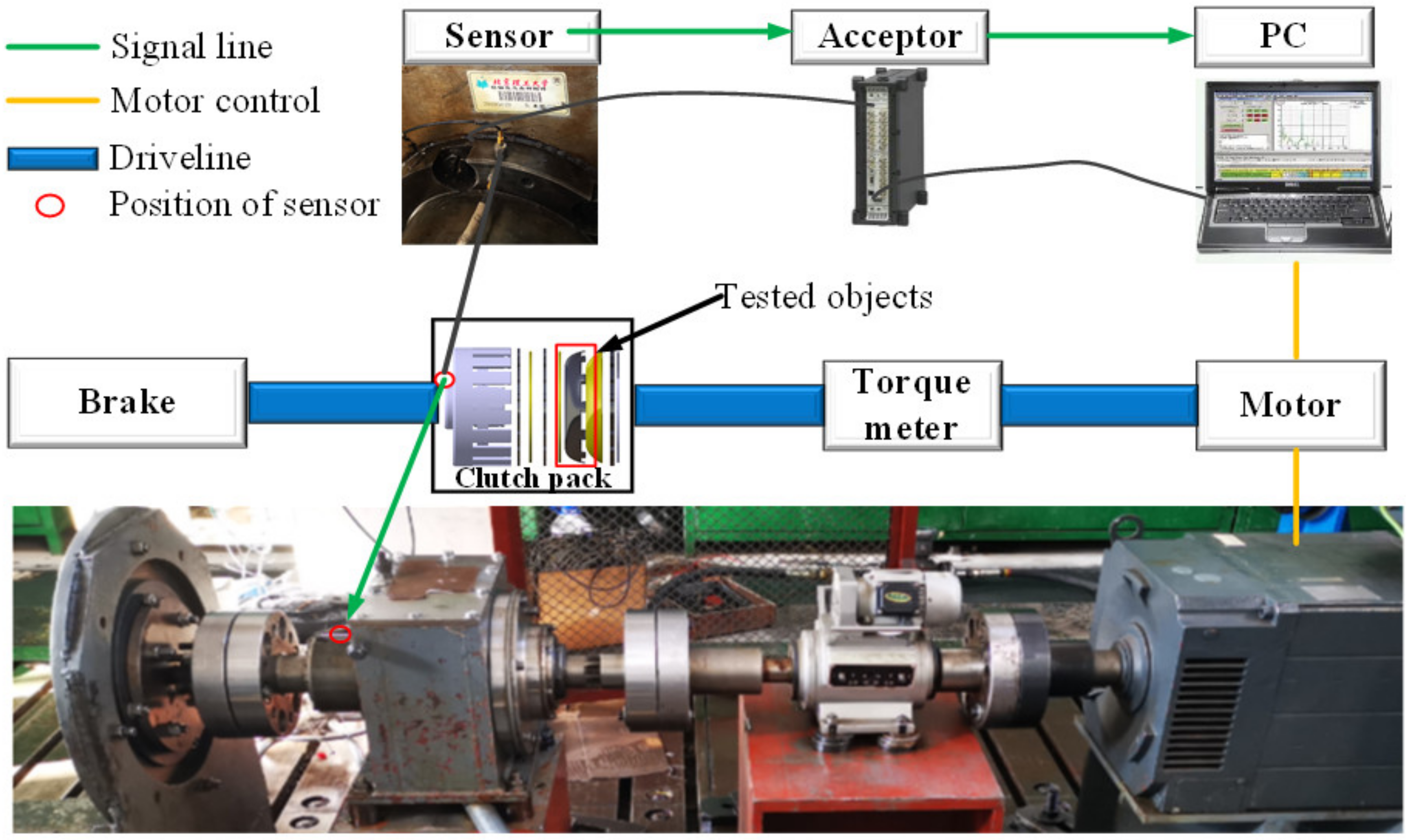
2.3. Bench Test
3. Signal Processing: Hilbert Spectrum and Time-Frequency Entropy
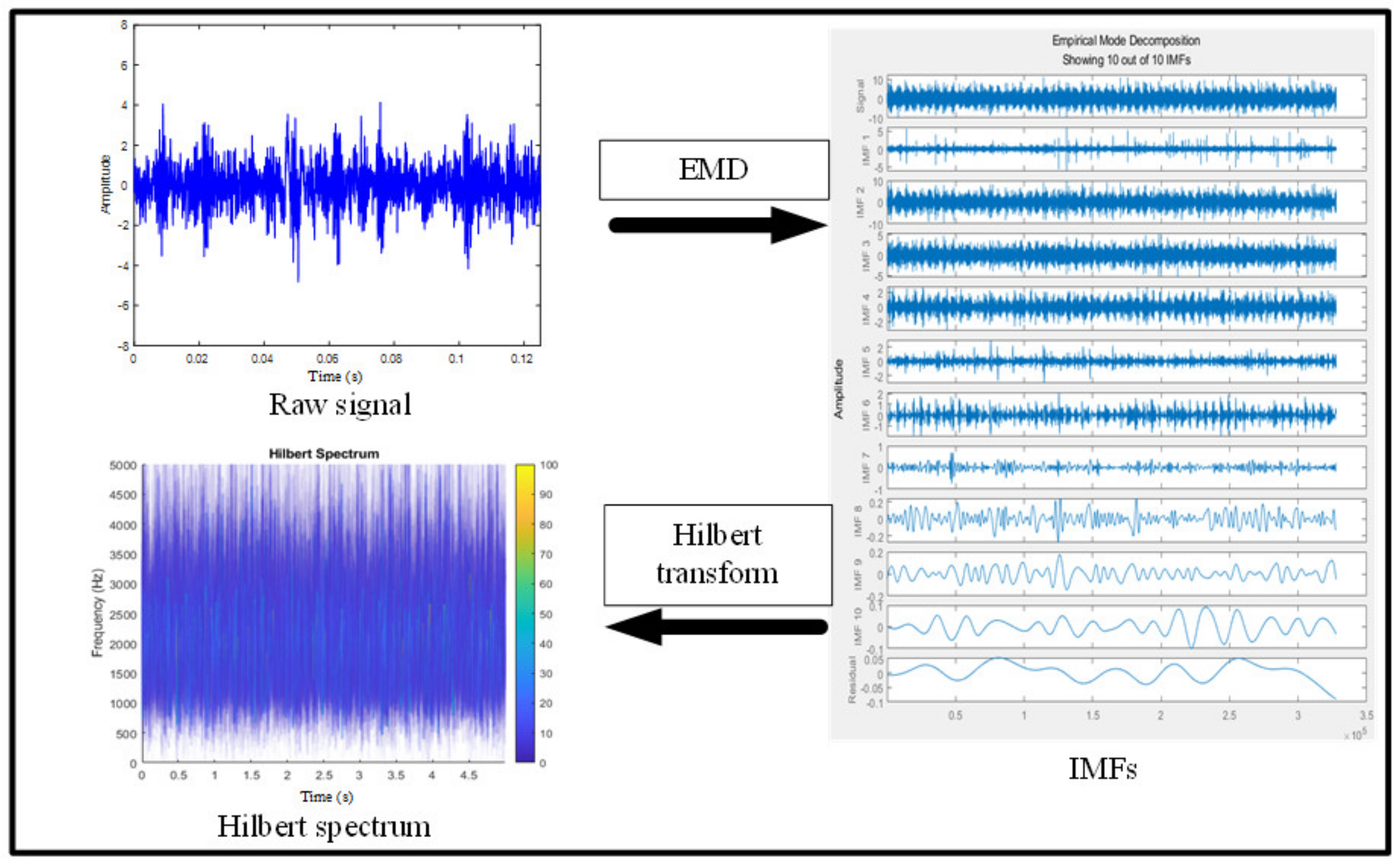
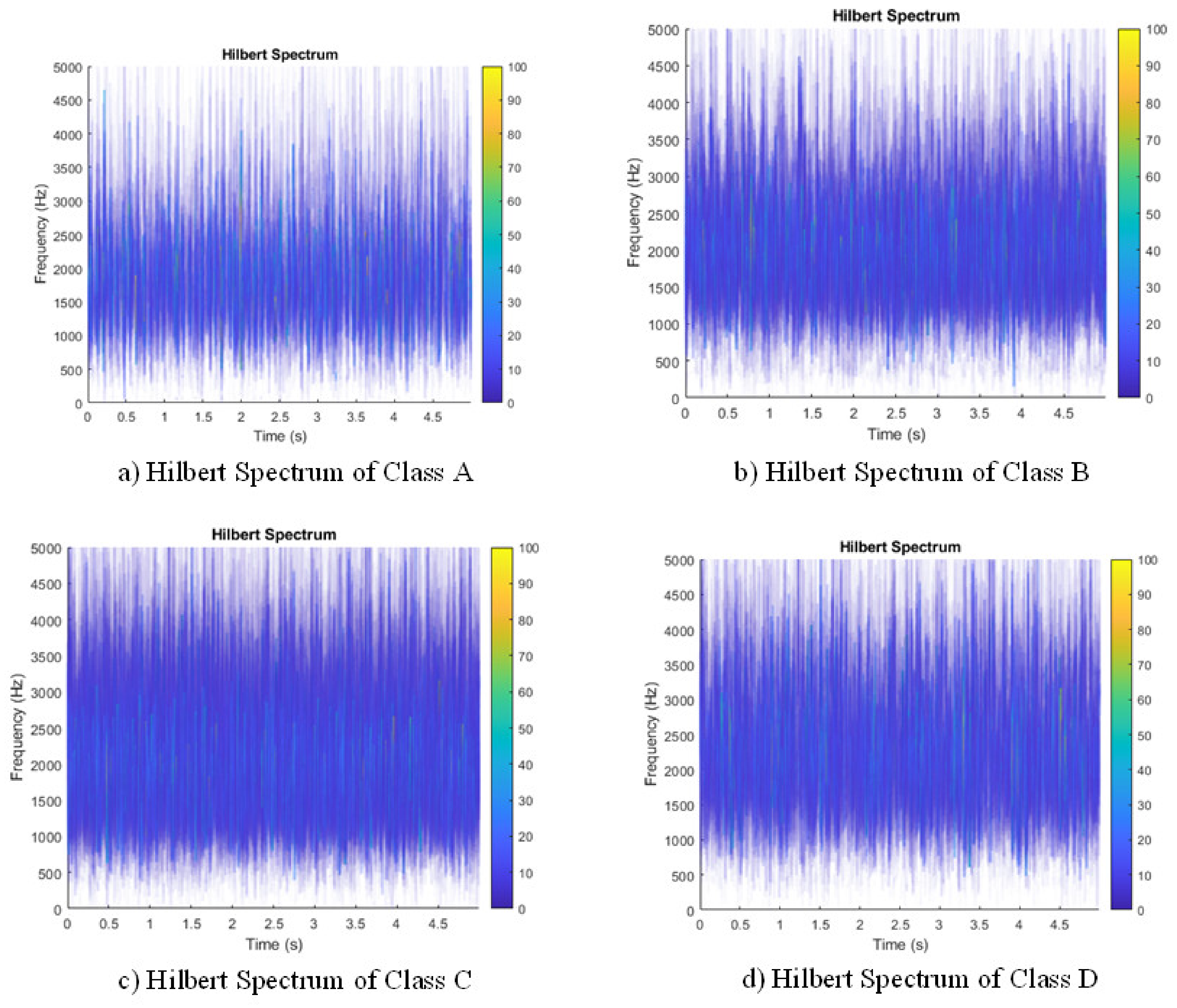
3.1. Hilbert–Huang Transform and Hilbert Spectrum
3.2. Time-Frequency Entropy
4. Entropy-Based Fault Diagnosis Method
4.1. Classifiers
4.1.1. Naïve Bayes Classifier
4.1.2. k-Nearest Neighbor
4.1.3. Support Vector Machine
4.2. Features in the Time Domain
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bao, H.; Li, X.; Huang, W. Calculation Method of Radial Displacement in the Engaging Process of Wet Friction Clutch. J. Mech. Sci. Technol. 2021, 35, 3909–3918. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.; Liu, J.; Zheng, L. Numerical and Experimental Studies on the Characteristics of Friction Torque Based on Wet Paper-Based Clutches. Tribol. Int. 2019, 131, 541–553. [Google Scholar] [CrossRef]
- Zagrodzki, P. Numerical Analysis of Temperature Fields and Thermal Stresses in the Friction Discs of a Multi-disc Wet Clutch. Wear 1985, 101, 255–271. [Google Scholar] [CrossRef]
- Zagrodzki, P.; Truncone, S.A. Generation of Hot Spots in a Wet Multidisk Clutch during Short-Term Engagement. Wear 2003, 254, 474–491. [Google Scholar] [CrossRef]
- Li, H.; Li, M.; Ma, B.; Liu, J.; Yu, L.; Li, H. Mechanical Buckling Induced Thermoelastic Instability in Frictional Clutches Mechanical Buckling Induced Thermoelastic Instability in Frictional Clutches; ReasearchGate: Berlin, Germany, 2019. [Google Scholar] [CrossRef]
- Zhao, E.H.; Ma, B.; Li, H.Y. The Tribological Characteristics of Cu-Based Friction Pairs in a Wet Multidisk Clutch under Nonuniform Contact. J. Tribol. 2018, 140, 011401. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.; Liu, J. Investigation on the Thermodynamic Characteristics of the Deformed Separate Plate in a Multi-Disc Clutch. Eng. Fail. Anal. 2020, 110, 104385. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, J.; Li, F.; Zhang, K.; Lv, H.; He, S.; Xu, E. Intelligent Fault Diagnosis of Machines with Small & Imbalanced Data: A State-of-the-Art Review and Possible Extensions. ISA Trans. 2022, 119, 152–171. [Google Scholar] [CrossRef] [PubMed]
- Li, A.; Yang, X.; Dong, H.; Xie, Z.; Yang, C. Machine Learning-Based Sensor Data Modeling Methods for Power Transformer PHM. Sensors 2018, 18, 4430. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbieri, N.; Barbieri, G.D.S.A.V.; Martins, B.M.; Barbieri, L.D.S.A.V.; de Lima, K.F. Analysis of Automotive Gearbox Faults Using Vibration Signal. Mech. Syst. Signal Process. 2019, 129, 148–163. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Prosvirin, A.E.; Kim, C.H.; Kim, J.M. Construction of a Sensitive and Speed Invariant Gearbox Fault Diagnosis Model Using an Incorporated Utilizing Adaptive Noise Control and a Stacked Sparse Autoencoder-Based Deep Neural Network. Sensors 2021, 21, 18. [Google Scholar] [CrossRef]
- Liu, T.; Lu, C.; Liu, Q.; Zha, Y. Coal and Rock Hardness Identification Based on EEMD and Multi-Scale Permutation Entropy. Entropy 2021, 23, 1113. [Google Scholar] [CrossRef]
- Sun, W.; Shao, S.; Zhao, R.; Yan, R.; Zhang, X.; Chen, X. A Sparse Auto-Encoder-Based Deep Neural Network Approach for Induction Motor Faults Classification. Measurement 2016, 89, 171–178. [Google Scholar] [CrossRef]
- Jia, Y.; Xu, M.; Wang, R. Symbolic Important Point Perceptually and Hidden Markov Model Based Hydraulic Pump Fault Diagnosis Method. Sensors 2018, 18, 4460. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Wang, Z.Y.; Qin, W.L.; Ma, J. Fault Diagnosis of Rotary Machinery Components Using a Stacked Denoising Autoencoder-Based Health State Identification. Signal Process. 2017, 130, 377–388. [Google Scholar] [CrossRef]
- Dávalos, A.; Jabloun, M.; Ravier, P.; Buttelli, O. The Impact of Linear Filter Preprocessing in the Interpretation of Permutation Entropy. Entropy 2021, 23, 787. [Google Scholar] [CrossRef]
- Chen, Z.; Gryllias, K.; Li, W. Mechanical Fault Diagnosis Using Convolutional Neural Networks and Extreme Learning Machine. Mech. Syst. Signal Process. 2019, 133, 106272. [Google Scholar] [CrossRef]
- Yang, F.; Kou, Z.; Wu, J.; Li, T. Application of Mutual Information-Sample Entropy Based MED-ICEEMDAN denoising Scheme for Weak Fault Diagnosis of Hoist Bearing. Entropy 2018, 20, 667. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Ventilation Diagnosis of Angle Grinder Using Thermal Imaging. Sensors 2021, 21, 2853. [Google Scholar] [CrossRef] [PubMed]
- Smith, W.A.; Randall, R.B. Rolling Element Bearing Diagnostics Using the Case Western Reserve University Data: A Benchmark Study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, C.; Hu, J.; Hu, Q. Influences of Lubrication Flow Rates on Critical Speed of Rub-Impact at High Circumferential Velocities in No-Load Multi-Plate Wet Clutch. Tribol. Int. 2019, 140, 105847. [Google Scholar] [CrossRef]
- Ompusunggu, A.P.; Papy, J.M.; Vandenplas, S.; Sas, P.; Van Brussel, H. A Novel Monitoring Method of Wet Friction Clutches Based on the Post-Lockup Torsional Vibration Signal. Mech. Syst. Signal Process. 2013, 35, 345–368. [Google Scholar] [CrossRef]
- Hou, S.; Hu, J.; Peng, Z. Experimental Investigation on Unstable Vibration Characteristics of Plates and Drag Torque in Open Multiplate Wet Clutch at High Circumferential Speed. J. Fluids Eng. Trans. ASME 2017, 139, 111103. [Google Scholar] [CrossRef]
- Hu, J.; Hou, S.; Wei, C. Drag Torque Modeling at High Circumferential Speed in Open Wet Clutches Considering Plate Wobble and Mechanical Contact. Tribol. Int. 2018, 124, 102–116. [Google Scholar] [CrossRef]
- Yu, L.; Ma, B.; Chen, M.; Li, H.; Liu, J.; Li, M. Investigation on the Failure Mechanism and Safety Mechanical- Thermal Boundary of a Multi-Disc Clutch. Eng. Fail. Anal. 2019, 103, 319–334. [Google Scholar] [CrossRef]
- Li, Y.; Lin, J.; Niu, G.; Wu, M.; Wei, X. A Hilbert–Huang Transform-Based Adaptive Fault Detection and Classification Method for Microgrids. Energies 2021, 14, 5040. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Snin, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hubert Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Tosun, M.; Yıldız, M.; Özkan, A. Investigation and Refinement of Gearbox Whine Noise. Appl. Acoust. 2018, 130, 305–311. [Google Scholar] [CrossRef]
- Lu, Q.; Shen, X.; Wang, X.; Li, M.; Li, J.; Zhang, M. Fault Diagnosis of Rolling Bearing Based on Improved VMD and KNN. Math. Probl. Eng. 2021, 2021, 2530315. [Google Scholar] [CrossRef]
- Lin, S. Application of Machine Learning to a Medium Gaussian Support Vector Machine in the Diagnosis of Motor Bearing Faults. Electronics 2021, 10, 2266. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, L.; Liu, Y.; Gao, L. Wavelet-prototypical Network Based on Fusion of Time and Frequency Domain for Fault Diagnosis. Sensors 2021, 21, 1483. [Google Scholar] [CrossRef] [PubMed]
- Nikula, R.P.; Karioja, K.; Pylvänäinen, M.; Leiviskä, K. Automation of Low-Speed Bearing Fault Diagnosis Based on Autocorrelation of Time Domain Features. Mech. Syst. Signal Process. 2020, 138, 106572. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Health State | Separate Disk (mm) | Friction Disk (mm) | ||||
|---|---|---|---|---|---|---|
| Class A Normal condition | 2.03 | 2.15 | 2.08 | 3.05 | 3.22 | 3.09 |
| 1.93 | 2.14 | 2.04 | 3.08 | 3.14 | 3.14 | |
| Average: 2.06 | Average: 3.12 | |||||
| Class B Slight buckling | 3.31 | 3.39 | 3.41 | 4.03 | 3.98 | 4.05 |
| 3.33 | 3.48 | 3.36 | 3.95 | 4.01 | 3.97 | |
| Average: 3.37 | Average: 4.02 | |||||
| Class C Medium buckling | 4.17 | 4.21 | 4.20 | 4.57 | 5 | 4.75 |
| 4.2 | 4.1 | 4.15 | 4.7 | 4.5 | 4.63 | |
| Average: 4.17 | Average: 4.69 | |||||
| Class D Severe buckling | 6.78 | 6.9 | 6.76 | 7.45 | 7.55 | 7.46 |
| 6.79 | 6.78 | 6.86 | 7.26 | 7.3 | 7.32 | |
| Average: 6.81 | Average: 7.39 | |||||
| Friction Component | Item | Outer Radius | Inner Radius | Healthy Thickness | Density |
|---|---|---|---|---|---|
| Separate Disk | 0.129 m | 0.081 m | 0.002 m | 7800 kg/m3 | |
| Friction Disk | 0.125 m | 0.086 m | 0.003 m | 5500 kg/m3 | |
| Operation parameter | ATF temperature | Rotation speed (rpm) | Sampling frequency/time | ||
| 30 °C | 500 600 700 800 900 1000 1100 | 64 kHz/ 5 s per run | |||
| Time Domain Feature | Expression |
|---|---|
| Root mean square | |
| The peak value | |
| The crest factor | |
| Kurtosis | |
| Skewness |
| Classifier | Entropy On/Off | Accuracy (%) with Features at Different Operating Speeds (rpm) | ||||||
|---|---|---|---|---|---|---|---|---|
| 500 | 600 | 700 | 800 | 900 | 1000 | 1100 | ||
| Naïve Bayes | With entropy | 86.3 | 50 | 83.1 | 65.0 | 55.0 | 63.1 | 80.6 |
| Without entropy | 66.3 | 48.8 | 68.1 | 53.1 | 50.6 | 49.4 | 68.8 | |
| KNN | With entropy | 81.3 | 45.6 | 58.8 | 48.1 | 51.9 | 51.9 | 76.9 |
| Without entropy | 66.3 | 43.1 | 54.4 | 42.5 | 47.5 | 41.9 | 57.5 | |
| SVM | With entropy | 82.5 | 51.2 | 83.1 | 67.5 | 62.5 | 61.9 | 81.9 |
| Without entropy | 64.4 | 48.8 | 63.7 | 55.6 | 62.5 | 46.9 | 72.5 | |
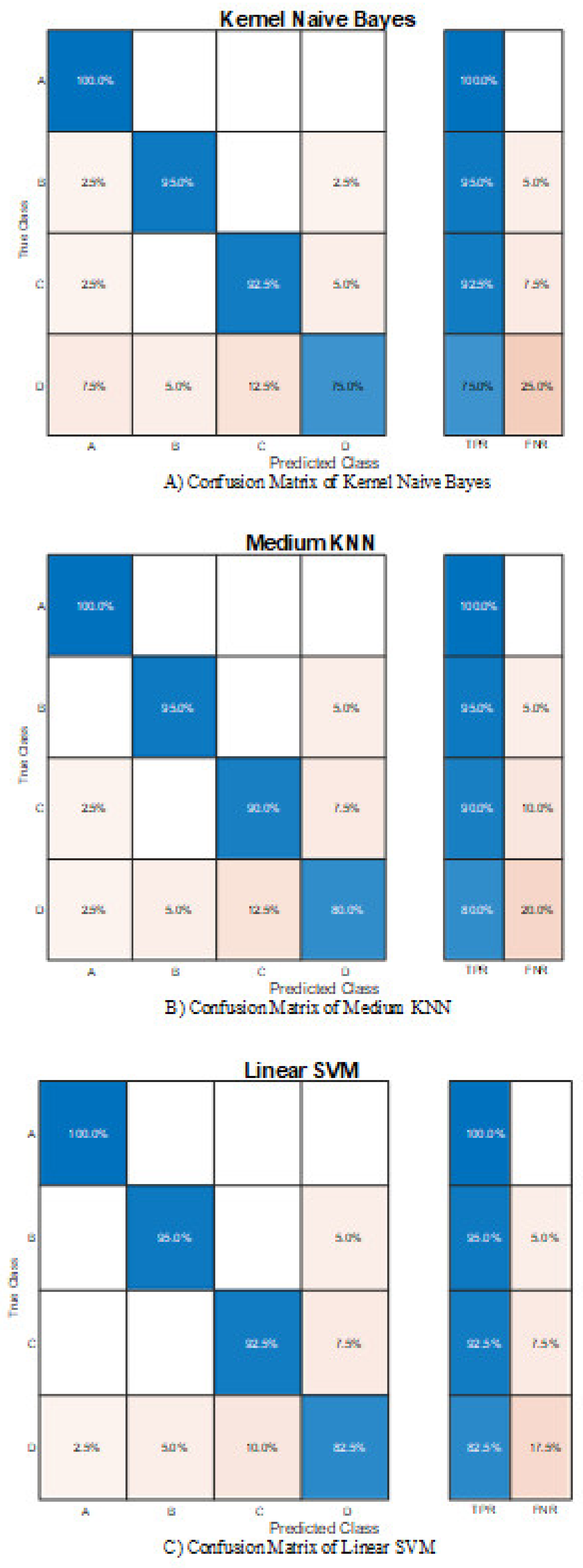
| Classifier | Accuracy (%) |
|---|---|
| Naïve Bayes | 90.6 |
| KNN | 89.4 |
| SVM | 92.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, J.; Ma, B.; Chen, M.; Zhang, Q.; Zheng, L. Experimental Investigation and Fault Diagnosis for Buckled Wet Clutch Based on Multi-Speed Hilbert Spectrum Entropy. Entropy 2021, 23, 1704. https://0-doi-org.brum.beds.ac.uk/10.3390/e23121704
Xue J, Ma B, Chen M, Zhang Q, Zheng L. Experimental Investigation and Fault Diagnosis for Buckled Wet Clutch Based on Multi-Speed Hilbert Spectrum Entropy. Entropy. 2021; 23(12):1704. https://0-doi-org.brum.beds.ac.uk/10.3390/e23121704
Chicago/Turabian StyleXue, Jiaqi, Biao Ma, Man Chen, Qianqian Zhang, and Liangjie Zheng. 2021. "Experimental Investigation and Fault Diagnosis for Buckled Wet Clutch Based on Multi-Speed Hilbert Spectrum Entropy" Entropy 23, no. 12: 1704. https://0-doi-org.brum.beds.ac.uk/10.3390/e23121704