
A New Method Based on Time-Varying Filtering Intrinsic Time-Scale Decomposition and General Refined Composite Multiscale Sample Entropy for Rolling-Bearing Feature Extraction


Abstract
:1. Introduction
2. Related Work
2.1. Intrinsic Time Scale Decomposition
2.2. Generalized Refined Composite Multiscale Sample Entropy
- (1)
- For time series , following formula is used to define coarse-grained series :where is the scale factor.
- (2)
- The sample entropy of coarse-grained sequence is calculated under different scale factors , that is, multiscale sample entropy:where is the embedding dimension; is the similarity tolerance; is the sample entropy value; and are the numbers of - and -dimensional space vectors of the coarse-grained sequence, respectively.
- (1)
- For time series , the following formula is used to calculate generalized coarse-grained series :
- (2)
- The sample entropy of generalized coarse-grained sequence is calculated under different scale factors , that is, generalized multiscale sample entropy:
- (1)
- For time series , the following formula is used to calculate generalized composite coarse-grained :
- (2)
- In the range of , the average values and of and are calculated to obtain the GRCMSE value of time series under scale factor s:
2.3. Coyote Optimization Algorithm
| Algorithm1. Birth and Death of Coyotes. |
|
| Algorithm2. COA Pseudo Code. |
|
3. Proposed Method
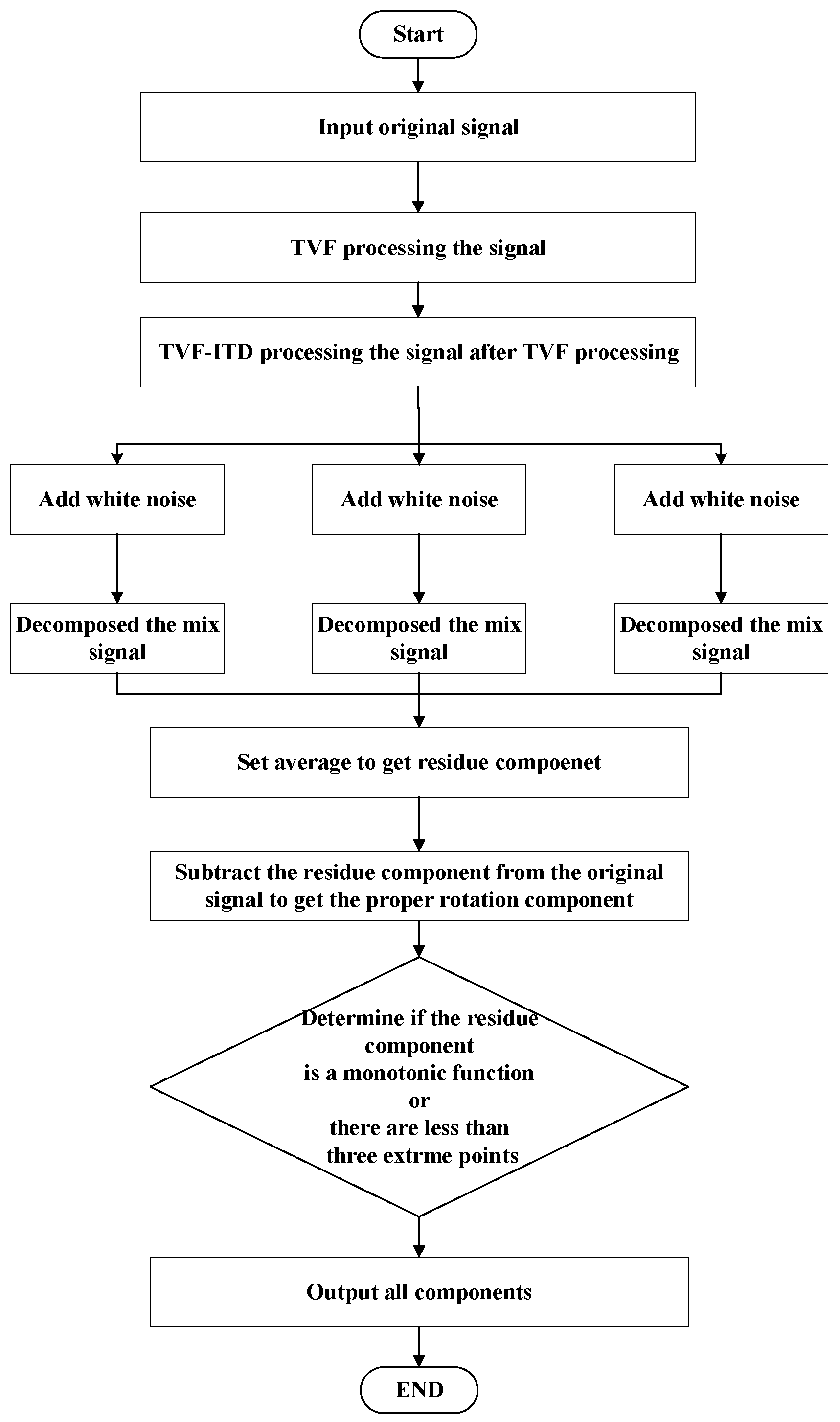
3.1. Fully Integrated Intrinsic Time-Scale Algorithm with Adaptive White Noise Based on Time-Varying Filtering
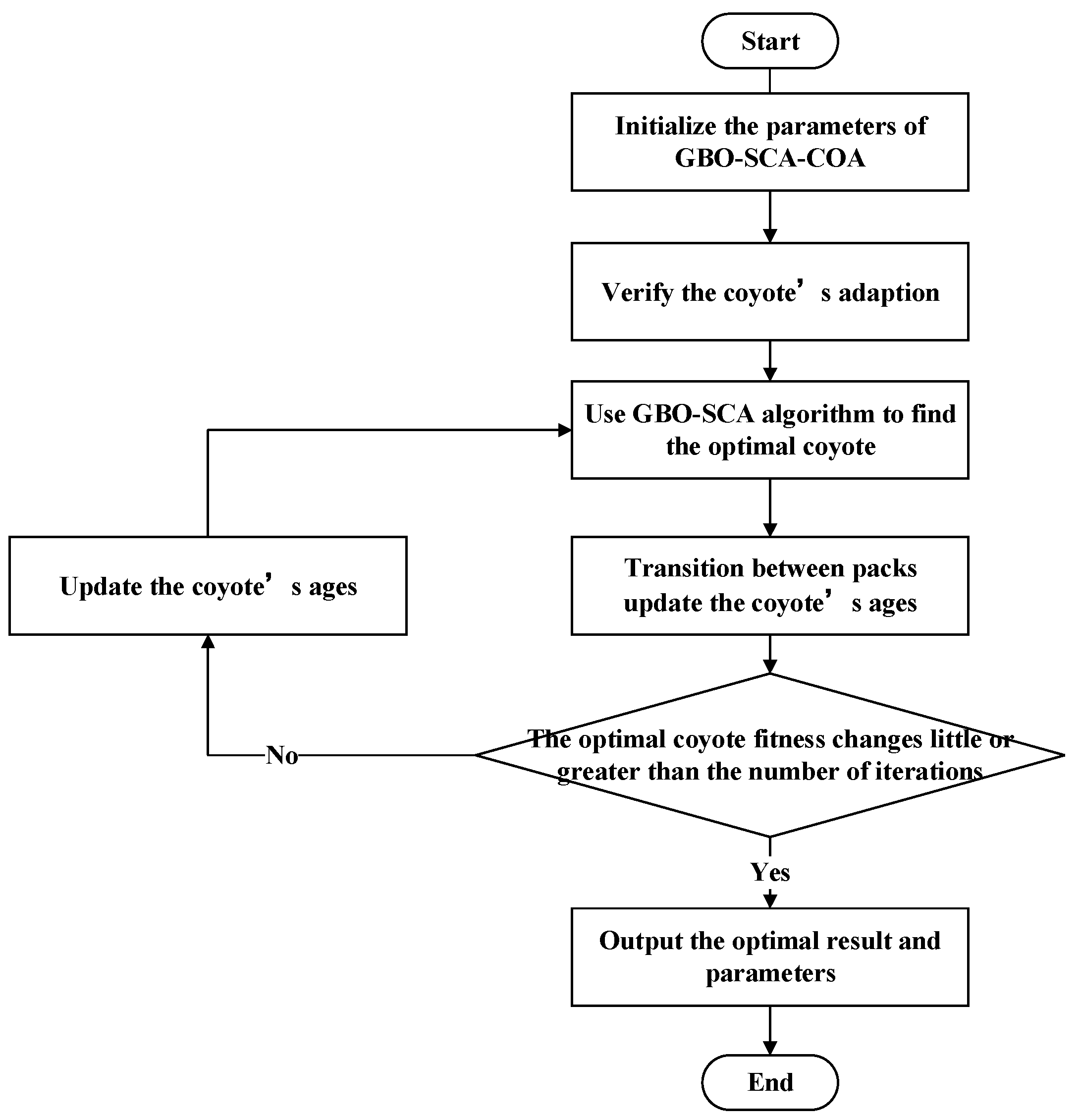
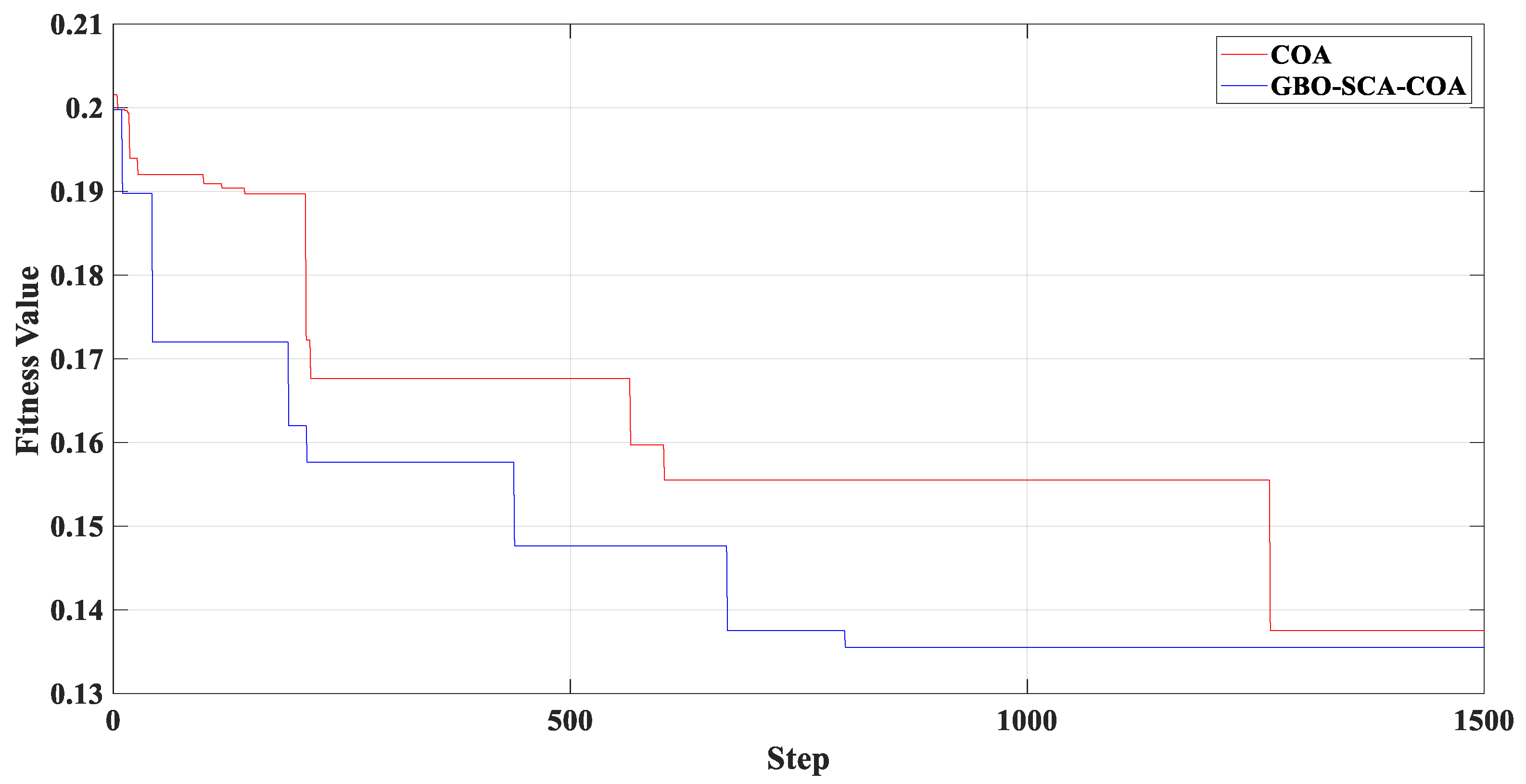
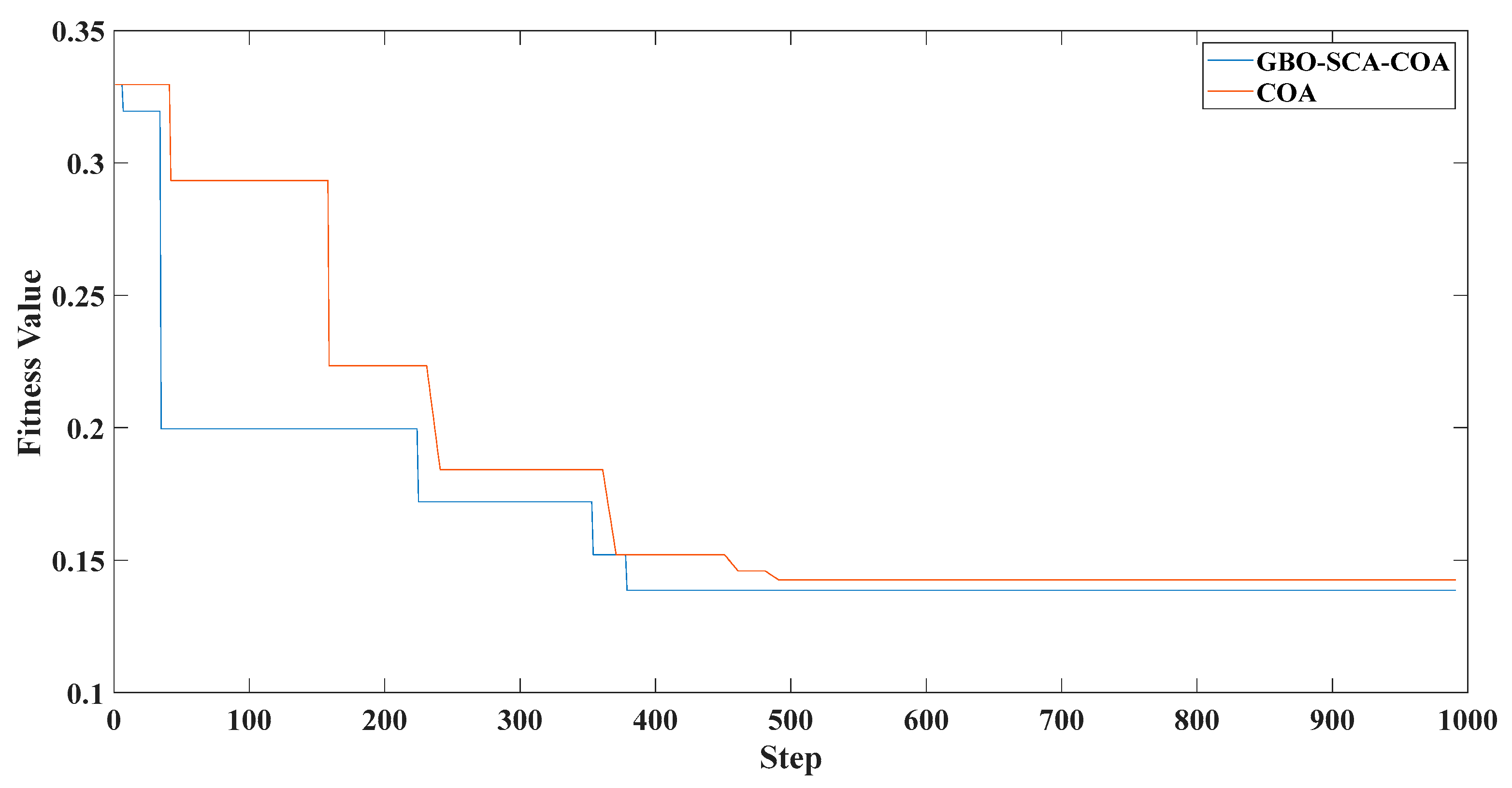
3.2. Coyote Optimization Algorithm Based on GBO–SCA Optimization
3.3. Specific Implementation Plan for Proposed Method
- (1)
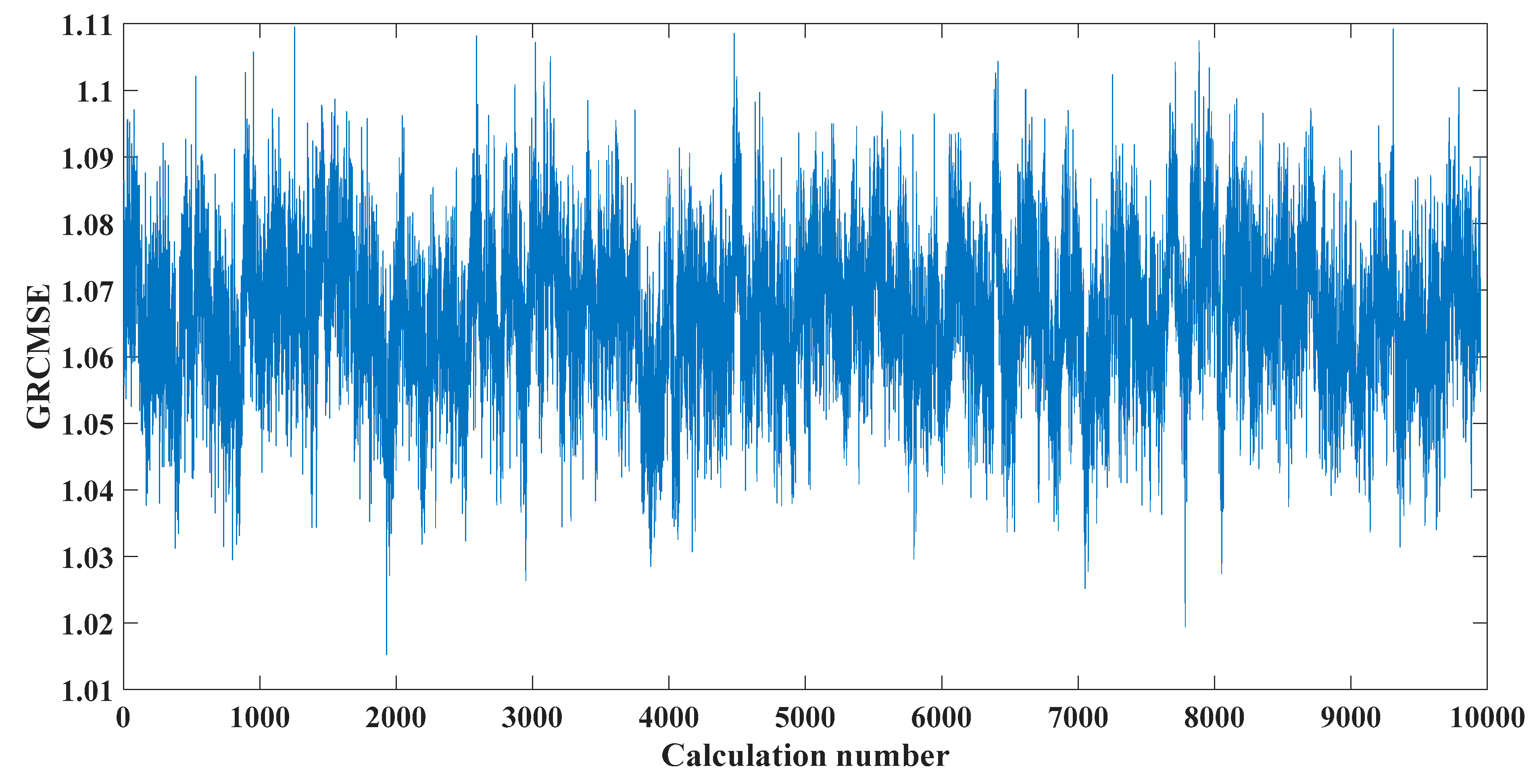
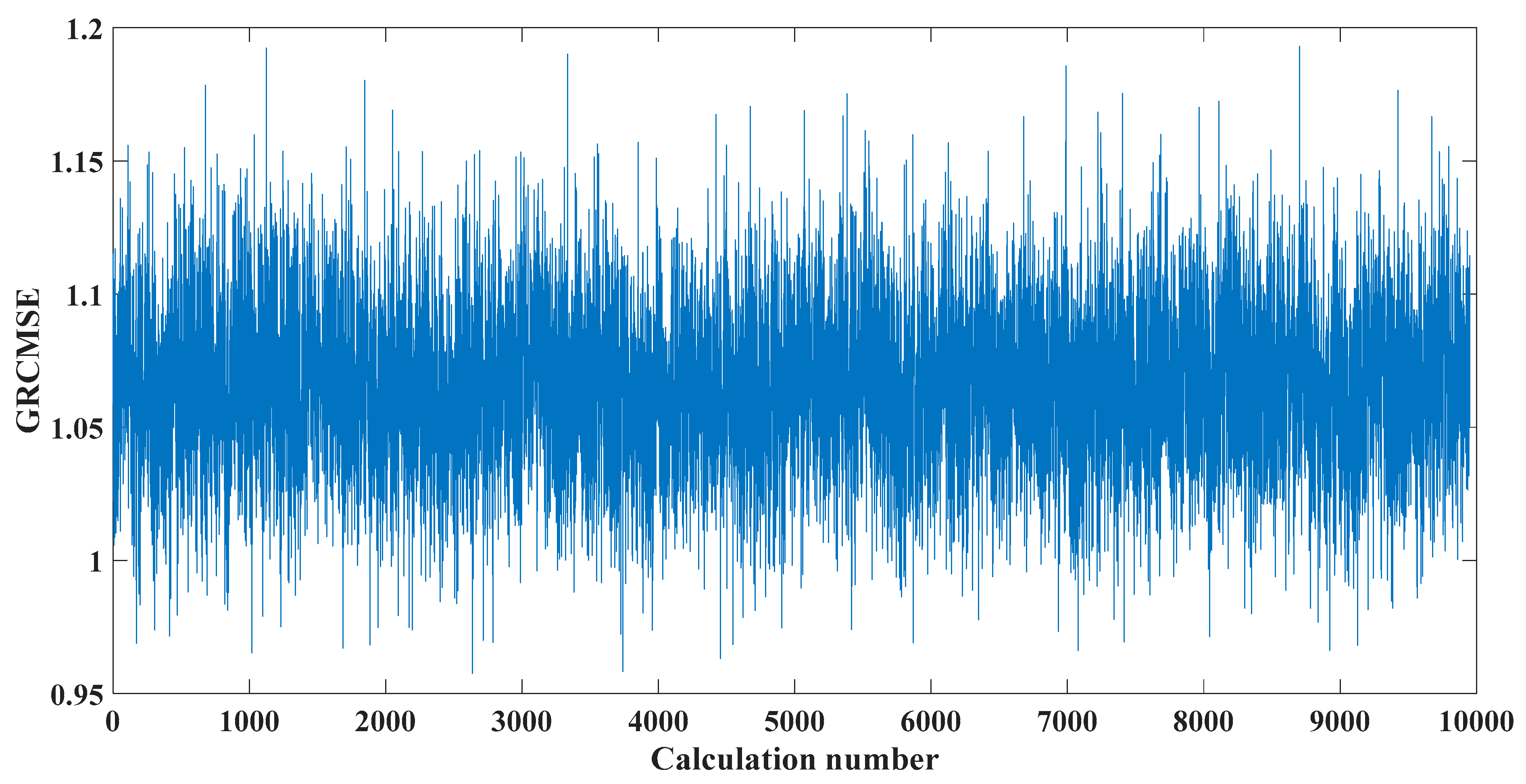
- Calculate the entropy value of the generalized fine composite multiscale sample of 10,000 groups of white noise, and the generalized fine composite multiscale sample entropy of the original signal. The average of the two is chosen as the threshold value.
- (2)
- Use GBO–SCA–COA to adaptively optimize the TVF–CEITDAN parameters and decompose the original signal. The optimization criterion is to select the largest Si value for all components. The coyote chooses the smallest, so the negative of the largest weighted average of all time-domain parameters is chosen as the fitness value. The optimization process is to first set the search range of the TVF–ITD parameters, , n = 5–30. Signal decomposition: calculate the Si of each mode component and save the minimal fitness value of each iteration. Determine whether the termination condition is satisfied; the termination condition is whether the current iteration number is greater than the termination iteration number. The minimal fitness and corresponding optimal parameters are extracted and substituted into TVF–CEITDAN. Re-decompose to obtain the final mode component.
- (3)
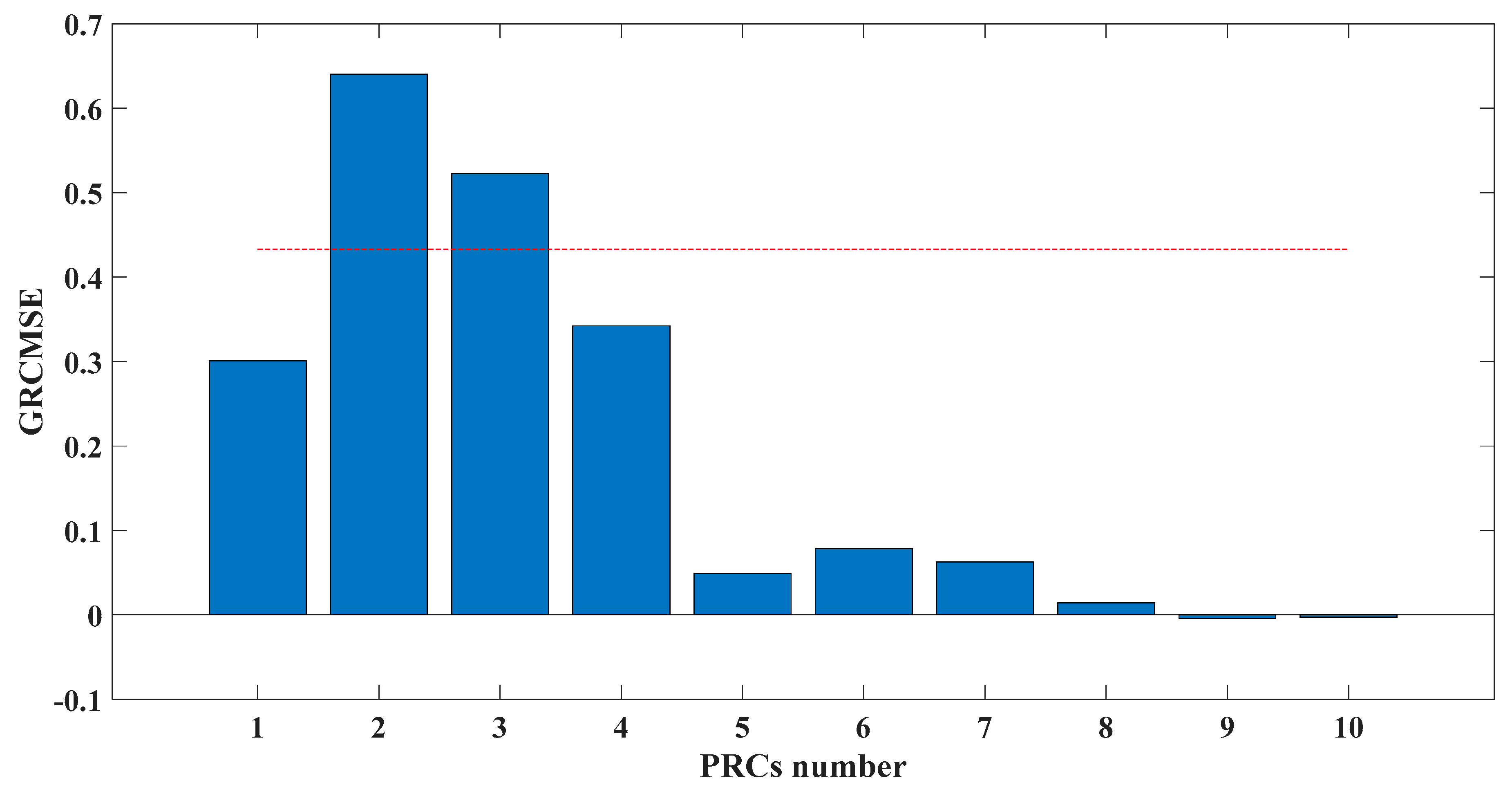
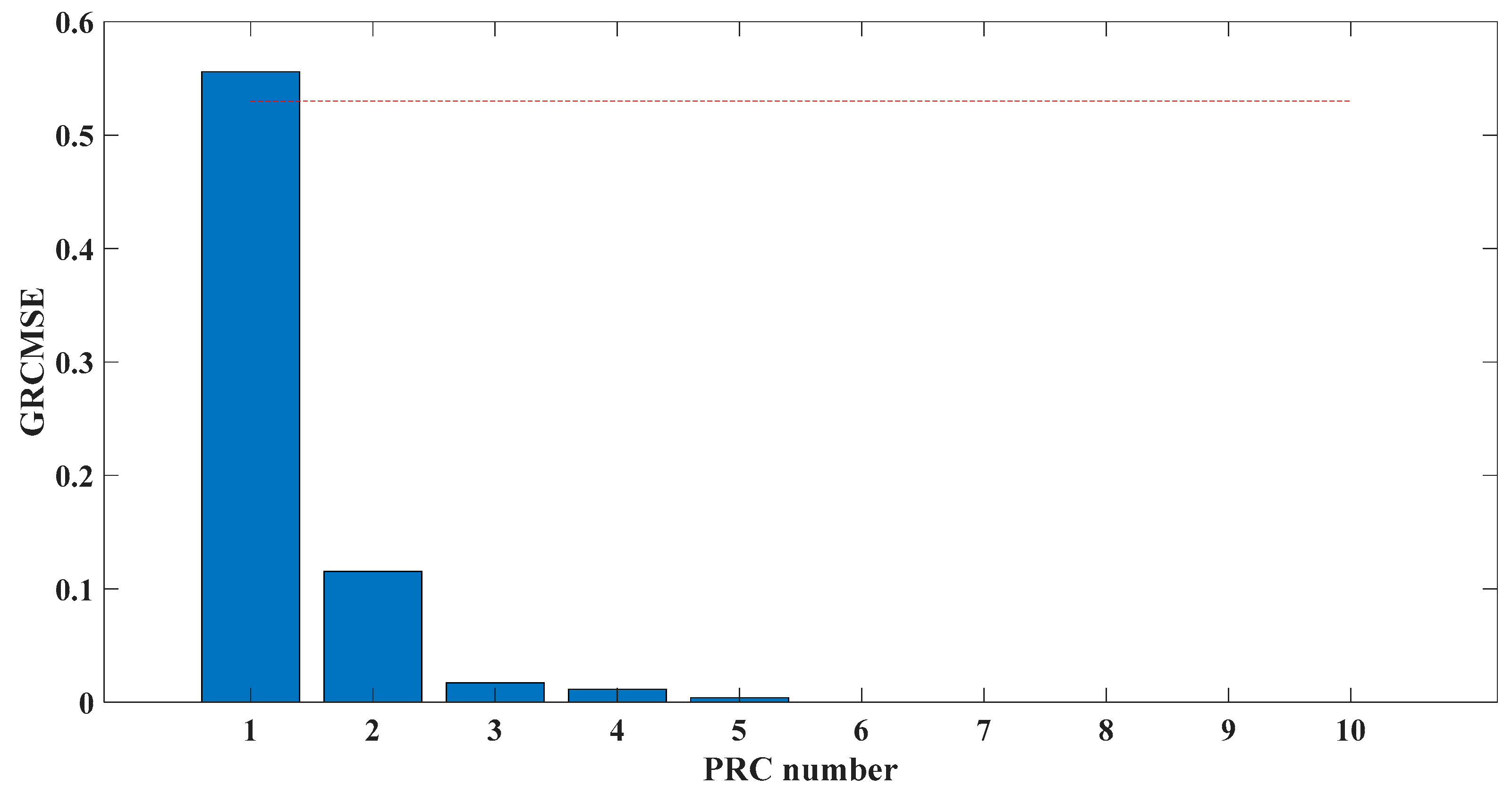
- Calculate the entropy value of the generalized refined composite multiscale sample entropy for each signal component.
- (4)
- Keep the mode components smaller than the threshold and reconstruct; then, perform the same operation as in the first step.
- (5)
- Calculate the entropy value of the generalized fine composite multiscale sample of each mode component again and compare it with the threshold. If there are still mode components that are greater than the threshold, repeat from the first step until there is no pattern component greater than the threshold.
- (6)
- Reconstruct the final decomposition result. Then, the reconstructed signal is transformed by the envelope spectrum to obtain the fault signal.
4. Results
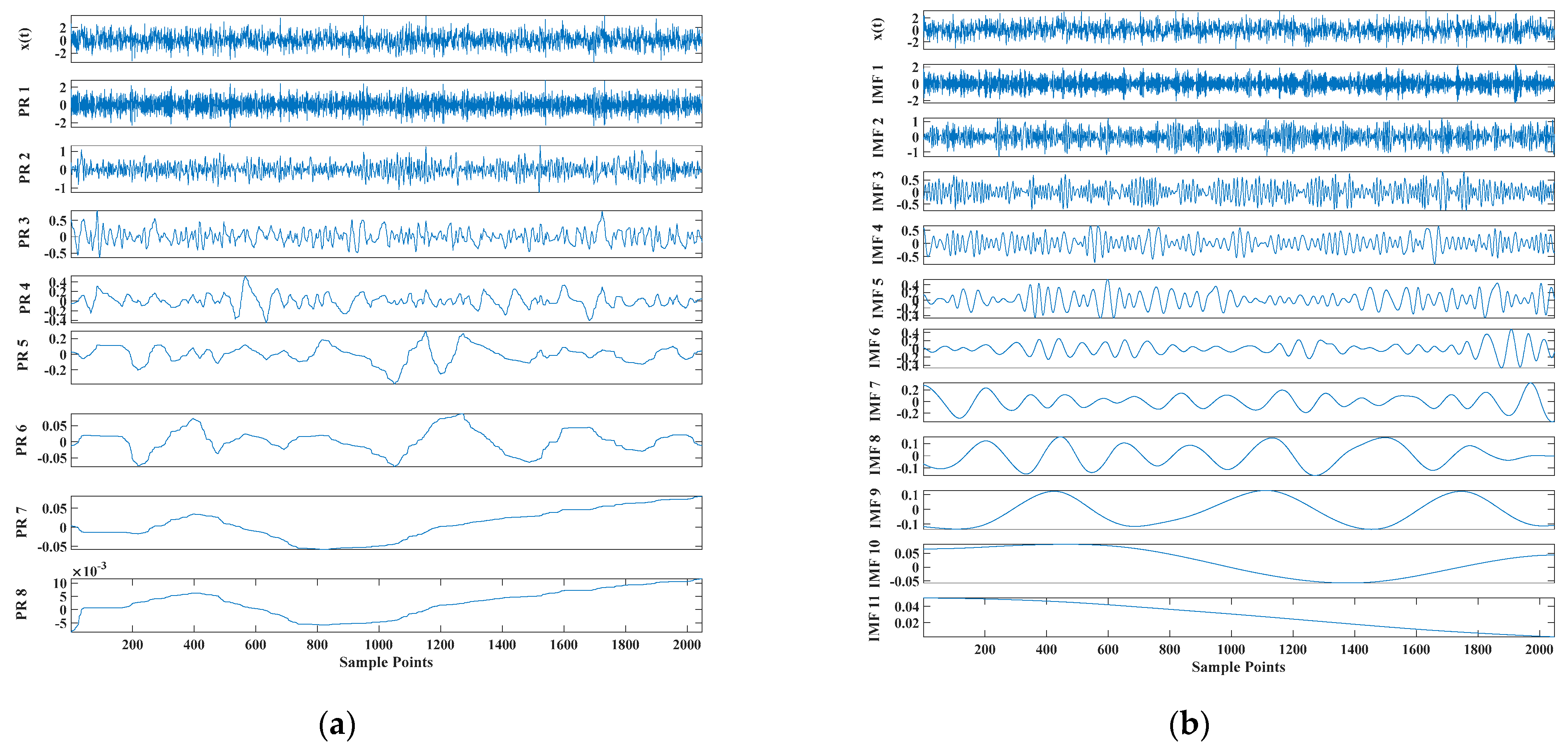
4.1. Case A: Numerical Simulation
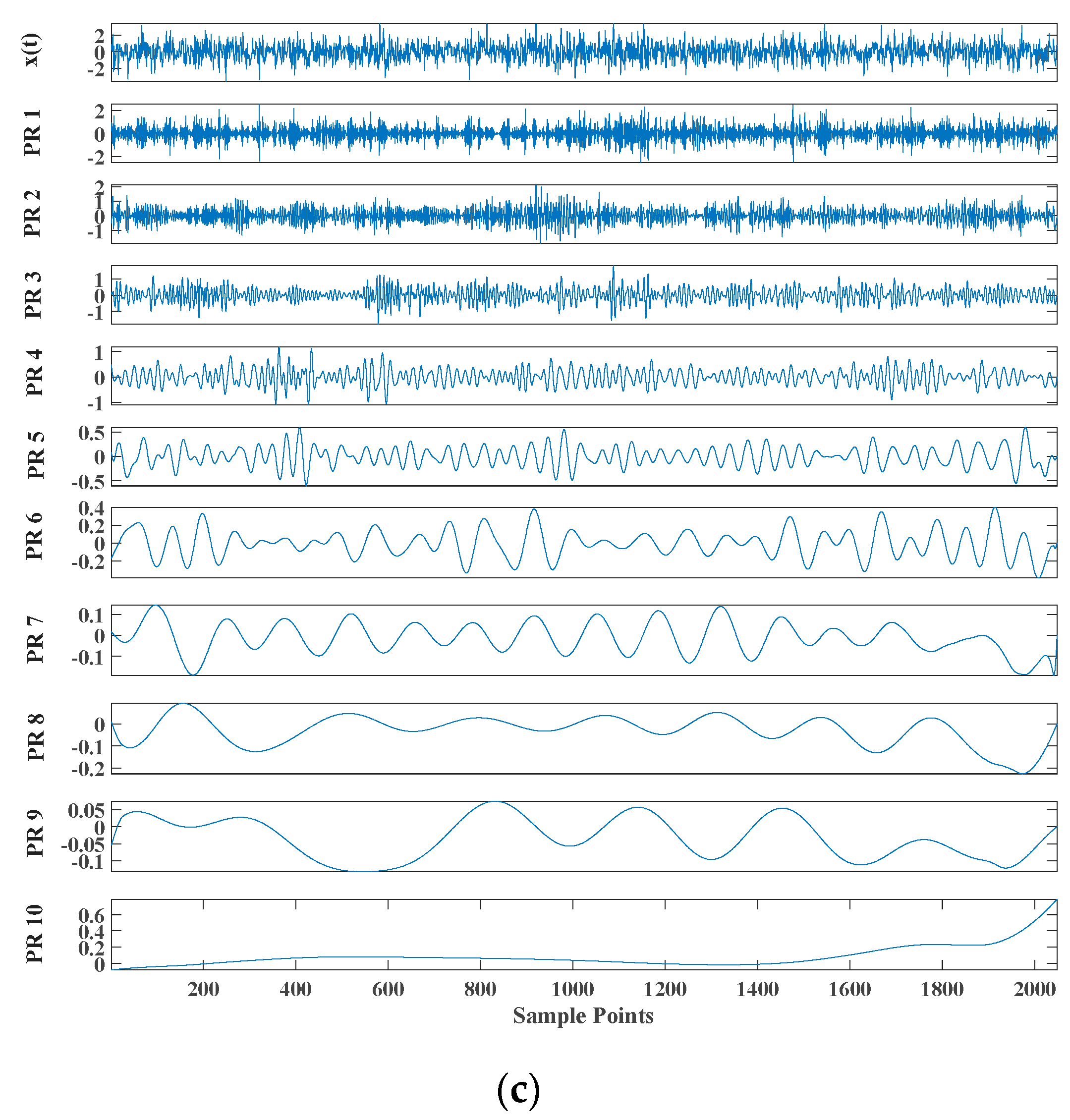
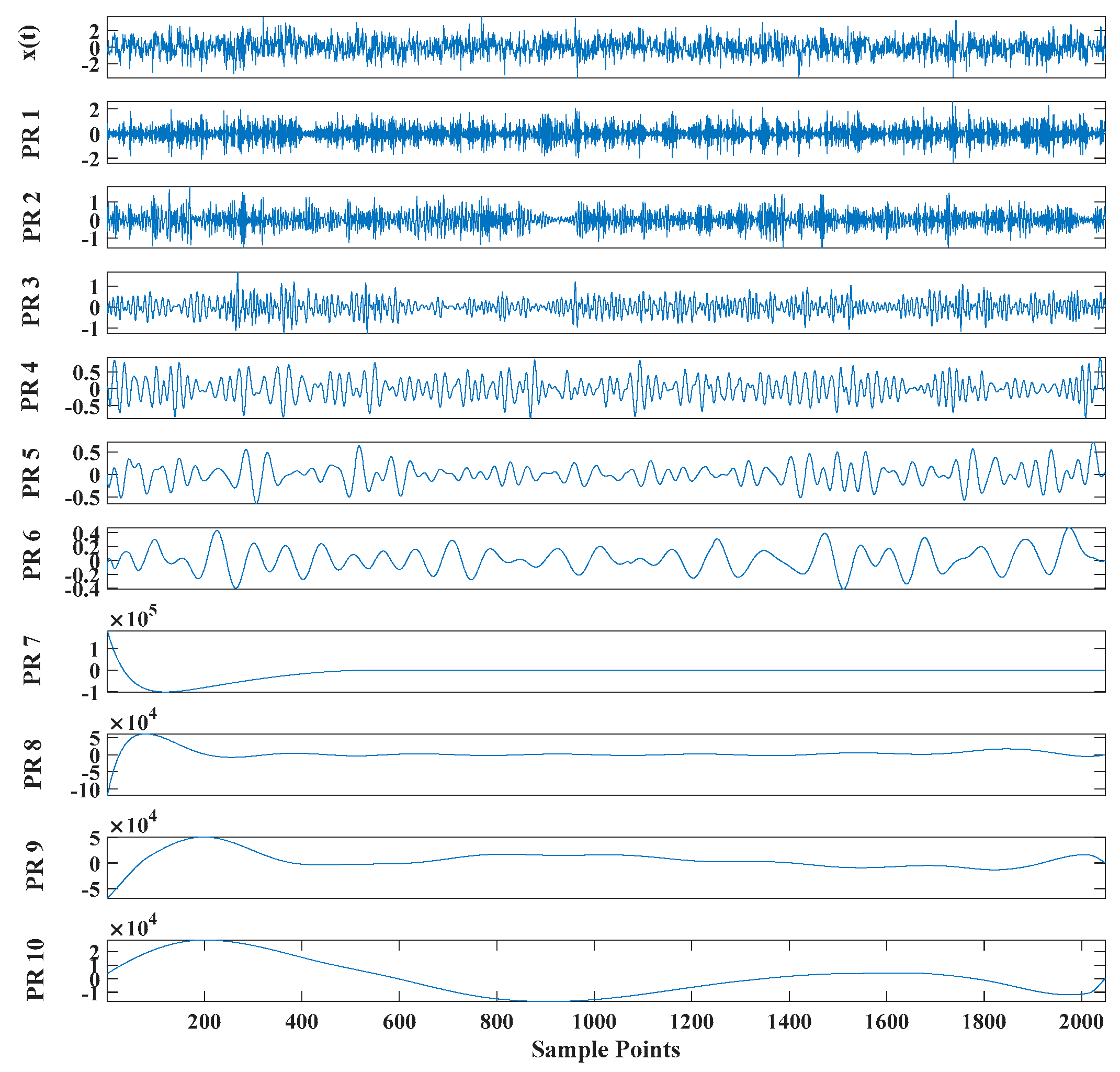
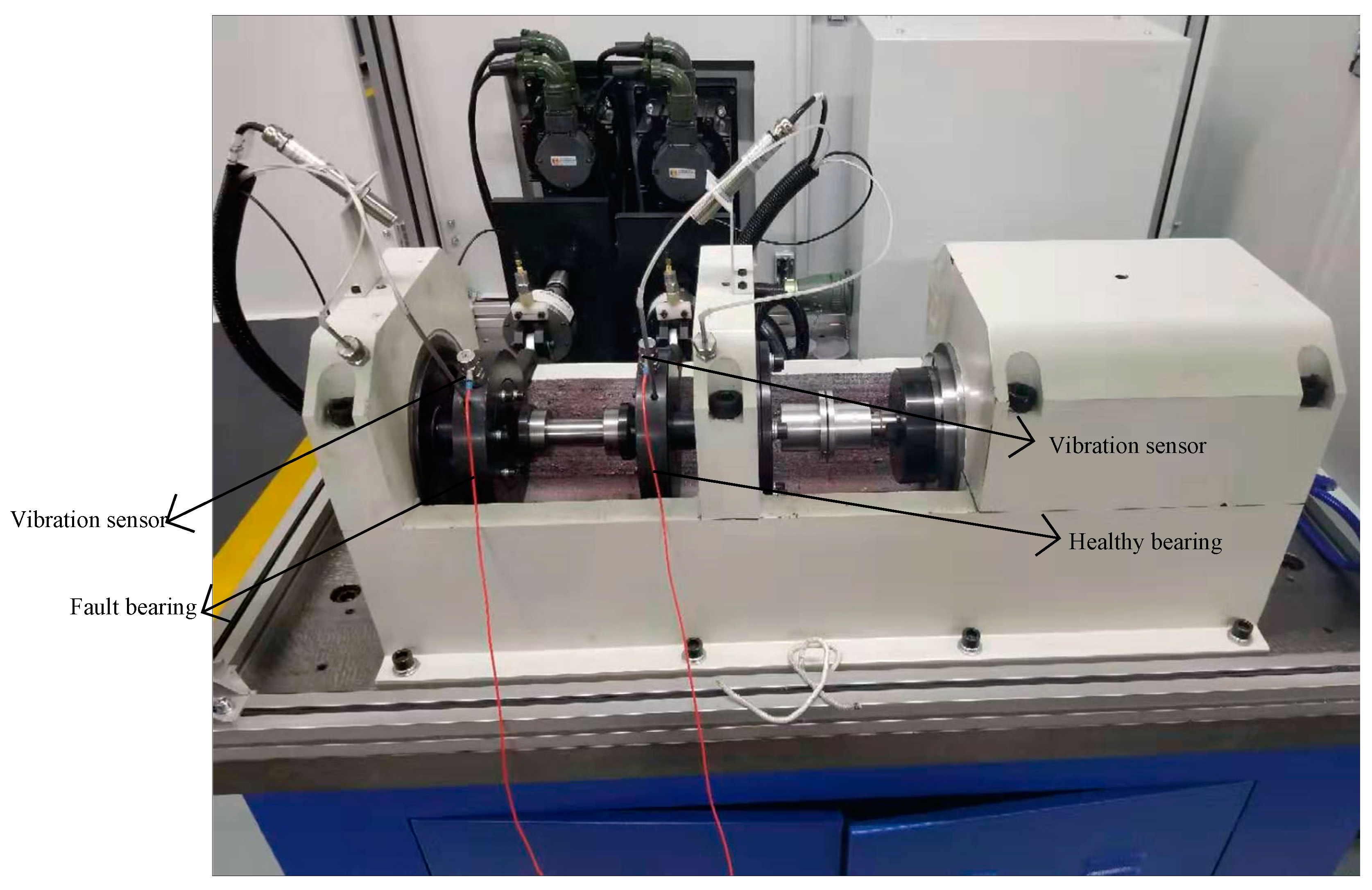
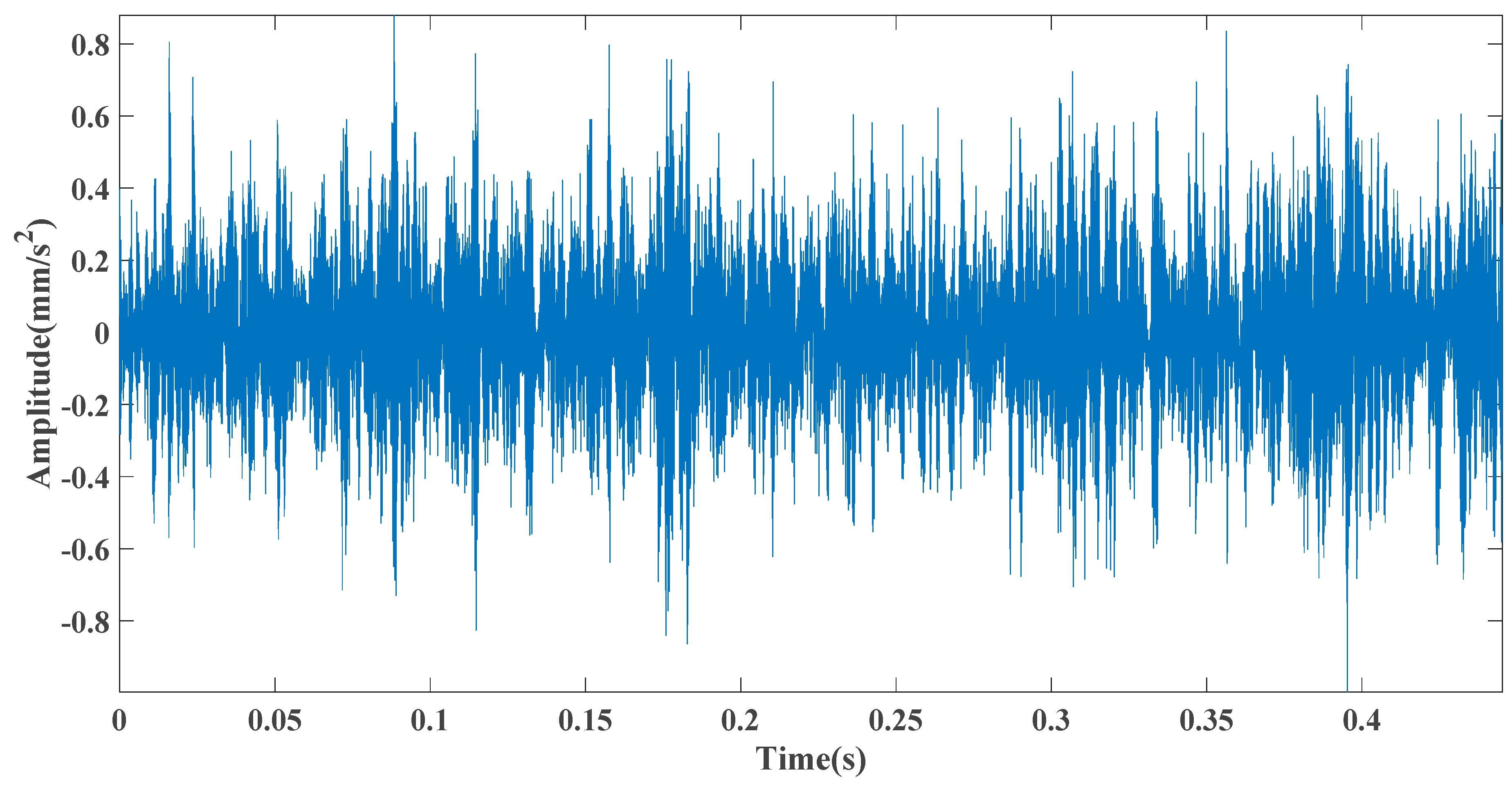
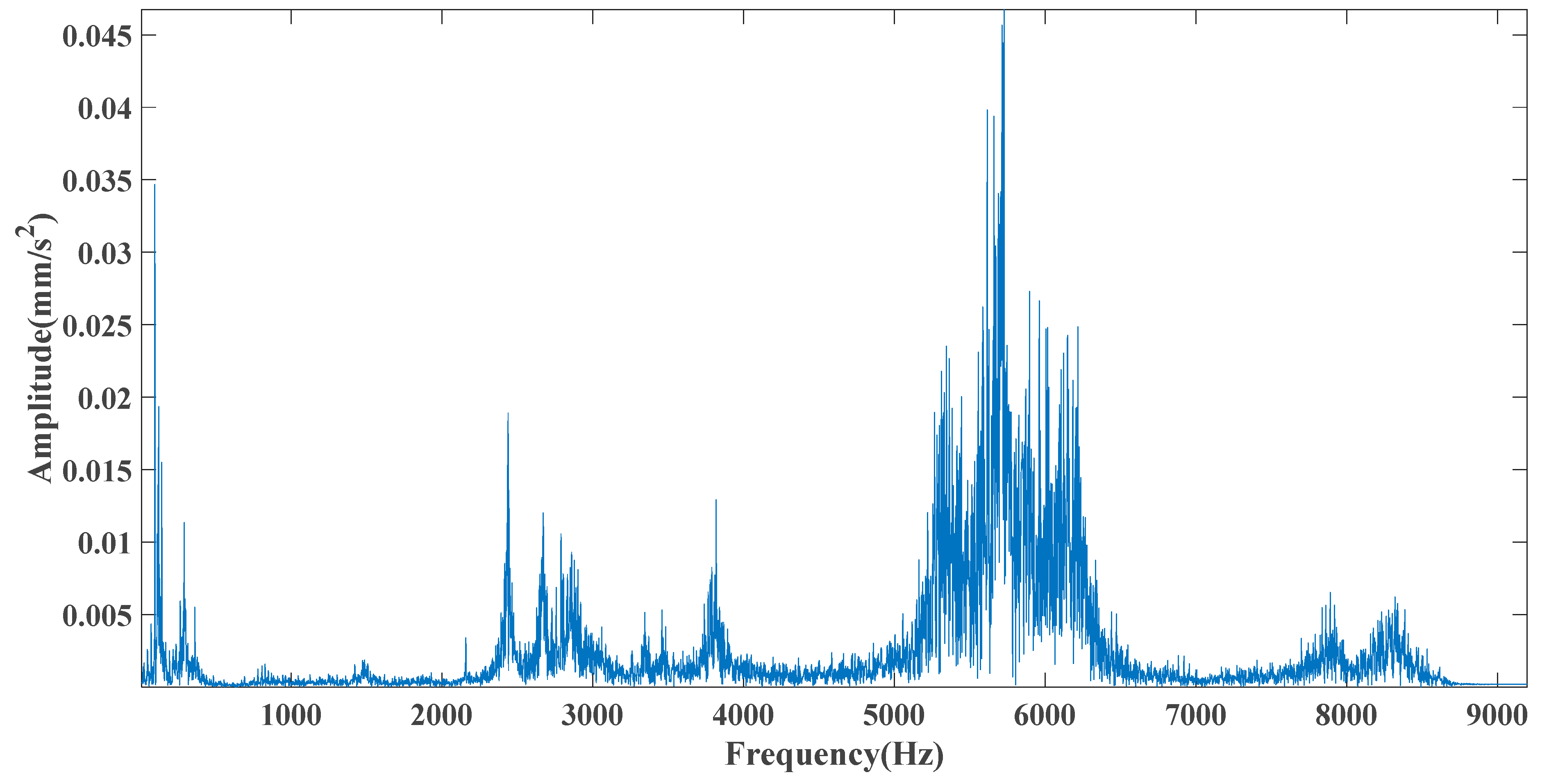
4.2. Case B: Experimental Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tu, X.; Hu, Y.; Li, F.; Abbas, S.; Liu, Z.; Bao, W. Demodulated High-Order Synchro Squeezing Transform with Application to Machine Fault Diagnosis. IEEE Trans. Ind. Electron. 2018, 66, 3071–3081. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, R. Role of Signal Processing, Modeling and Decision Making in the Diagnosis of Rolling Element Bearing Defect: A Review. J. Nondestruct. Eval. 2019, 38, 5. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, X.; Lu, S.; Xia, T.; Xi, L. A novel weak-fault detection technique for rolling element bearing based on vibrational resonance. J. Sound Vib. 2019, 438, 490–505. [Google Scholar] [CrossRef]
- Saxena, N.; Balasubramanian, R. A pansharpening scheme using spectral graph wavelet transforms and convolutional neural networks. Int. J. Remote Sens. 2021, 42, 2898–2919. [Google Scholar] [CrossRef]
- Akbari, H.; Sadiq, M.T.; Rehman, A.U. Classification of normal and depressed EEG signals based on centered correntropy of rhythms in empirical wavelet transform domain. Health Inf. Sci. Syst. 2021, 9, 1–15. [Google Scholar] [CrossRef]
- Han, D.Y.; Shi, P.M. Study on the mean first-passage time and stochastic resonance of a multi-stable system with colored correlated noises. Chin. J. Phys. 2021, 69, 98–107. [Google Scholar] [CrossRef]
- Zhang, G.; Jiang, C.; Zhang, T.Q. A Novel Adaptive Stochastic Resonance Method Based on Tristable System and its Applications. Fluct. Noise Lett. 2021, 20. [Google Scholar] [CrossRef]
- Kou, Z.M.; Yang, F.; Wu, J.; Li, T.Y. Application of ICEEMDAN energy entropy and AFSA-SVM for fault diagnosis of hoist sheave bearing. Entropy 2020, 22, 1347. [Google Scholar] [CrossRef]
- Zhao, X.; Qin, Y.; He, C.; Jia, L. Underdetermined blind source extraction of early vehicle bearing faults based on EMD and kernelized correlation maximization. J. Intell. Manuf. 2020, 1–17. [Google Scholar] [CrossRef]
- Frei, M.G.; Osorio, I. Intrinsic time-scale decomposition: Time–frequency–energy analysis and real-time filtering of non-stationary signals. Proc. R. Soc. A Math. Phys. Eng. Sci. 2006, 463, 321–342. [Google Scholar] [CrossRef]
- Bo, L.; Peng, C. Fault diagnosis of rolling element bearing using more robust spectral kurtosis and intrinsic time-scale decomposition. J. Vib. Control 2014, 22, 2921–2937. [Google Scholar] [CrossRef]
- Duan, L.; Yao, M.; Wang, J. Integrative intrinsic time-scale decomposition and hierarchical temporal memory approach to gearbox diagnosis under variable operating conditions. Adv. Mech. Eng. 2016, 8, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Xing, Z.; Qu, J.; Chai, Y.; Tang, Q.; Zhou, Y. Gear fault diagnosis under variable conditions with intrinsic time-scale decomposition-singular value decomposition and support vector machine. J. Mech. Sci. Technol. 2017, 31, 545–553. [Google Scholar] [CrossRef]
- Zhang, J.-H.; Liu, Y. Application of complete ensemble intrinsic time-scale decomposition and least-square SVM optimized using hybrid DE and PSO to fault diagnosis of diesel engines. Front. Inf. Technol. Electron. Eng. 2017, 18, 272–286. [Google Scholar] [CrossRef]
- Xiang, L.; Hu, A.; Gao, N. Fault diagnosis for the gearbox of wind turbine combining ensemble intrinsic time-scale decomposition with Wigner bi-spectrum entropy. J. Vibroeng. 2017, 19, 1759–1770. [Google Scholar] [CrossRef]
- Tong, Q.; Cao, J.; Han, B.; Wang, D.; Lin, Y.; Zhang, W.; Wang, J. A fault diagnosis approach for rolling element bearings based on dual-tree complex wavelet packet transform-improved intrinsic time-scale decomposition, singular value decomposition, and online sequential extreme learning machine. Adv. Mech. Eng. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J.; Qin, K.; Xu, Y. Diesel engine fault diagnosis using intrinsic time-scale decomposition and multistage Adaboost relevance vector machine. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 881–894. [Google Scholar] [CrossRef]
- Bi, F.; Ma, T.; Liu, C.; Tian, C. Knock detection in spark ignition engines based on complementary ensemble improved intrinsic time-scale decomposition (CEIITD) and Bi-spectrum. J. Vibroeng. 2018, 20, 936–953. [Google Scholar] [CrossRef]
- Yu, J.; Liu, H. Sparse Coding Shrinkage in Intrinsic Time-Scale Decomposition for Weak Fault Feature Extraction of Bearings. IEEE Trans. Instrum. Meas. 2018, 67, 1579–1592. [Google Scholar] [CrossRef]
- Yuan, Z.; Peng, T.; An, D.; Cristea, D.; Pop, M.A. Rolling bearing fault diagnosis based on adaptive smooth ITD and MF-DFA method. J. Low Freq. Noise Vib. Act. Control 2020, 39, 968–986. [Google Scholar] [CrossRef] [Green Version]
- Lei, Z.; Zhou, Y.; Sun, B.; Sun, W. An intrinsic timescale decomposition-based kernel extreme learning machine method to detect tool wear conditions in the milling process. Int. J. Adv. Manuf. Technol. 2019, 106, 1203–1212. [Google Scholar] [CrossRef]
- Ma, J.; Zhan, L.; Li, C.; Li, Z. An improved intrinsic time scale decomposition method based on adaptive noise and its application in bearing fault feature extraction. Meas. Sci. Technol. 2020, 32, 025103. [Google Scholar] [CrossRef]
- Sun, Y.; Yu, J. Fault Detection of Rolling Bearing Using Sparse Representation-Based Adjacent Signal Difference. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Babiker, A.; Yan, C.F.; Li, Q.; Meng, J.D.; Wu, L.X. Initial fault time estimation of rolling bearing by backtracking strategy, improved VMD and infogram. J. Meas. Sci. Technol. 2021, 35, 425–437. [Google Scholar]
- Xu, L.; Chatterton, S.; Pennacchi, P. Rolling element bearing diagnosis based on singular value decomposition and composite squared envelope spectrum. Mech. Syst. Signal Process. 2021, 148, 107174. [Google Scholar] [CrossRef]
- Huo, Z.Q.; Martinez-Garcia, M.; Zhang, Y.; Yan, R.Q.; Shu, L. Entropy measures in machine fault diagnosis: Insights and applications. IEEE Trans. Instrum. Meas. 2020, 69, 2607–2620. [Google Scholar] [CrossRef]
- Yang, C.; Jia, M.P. Hierarchical multiscale permutation entropy-based feature extraction and fuzzy support tensor machine with pinball loss for bearing fault identification. Mech. Syst. Signal Process. 2021, 149, 107182. [Google Scholar] [CrossRef]
- Sandoval, D.; Leturiondo, U.; Vidal, Y.; Pozo, F. Entropy indicators: An approach for low-speed bearing diagnosis. Sensors 2021, 21, 849. [Google Scholar] [CrossRef]
- Tang, G.; Huang, Y.J.; Wang, Y.T. Fractional frequency band entropy for bearing fault diagnosis under varying speed conditions. Measurement 2021, 171, 108777. [Google Scholar] [CrossRef]
- Zou, F.; Zhang, H.; Sang, S.; Li, X.; He, W.; Liu, X. Bearing fault diagnosis based on combined multi-scale weighted entropy morphological filtering and bi-LSTM. Appl. Intell. 2021, 1–18. [Google Scholar] [CrossRef]
- Xi, C.B.; Yang, G.Y.; Liu, L.; Jiang, H.Y.; Chen, X.H. A refined composite multivariate multiscale fluctuation dispersion entropy and its application to multivariate signal of rotating machinery. Entropy 2021, 23, 128. [Google Scholar] [CrossRef]
- Li, H.M.; Huang, J.Y.; Yang, X.W.; Luo, J.; Zhang, L.D.; Pang, Y. Fault diagnosis for rotating machinery using multiscale permutation entropy nad convolutional neural networks. Entropy 2020, 22, 851. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.R.; Yang, W.X.; Luo, Y.X. Fault diagnosis of a rolling bearing based on adaptive sparest narrow-band decomposition and reined composite multiscale dispersion entropy. Entropy 2020, 22, 375. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.F.; Liu, S.L.; Cheng, S.G.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H.L. Dense multi-scale entropy and its application in mechanical fault diagnosis. Meas. Sci. Technol. 2020, 31, 125008. [Google Scholar] [CrossRef]
- Zhao, D.F.; Liu, S.L.; Cheng, S.G.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H.L. Improved multi-scale entropy and its application in rolling bearing fault feature extraction. Measurement 2020, 152, 107361. [Google Scholar] [CrossRef]
- Wang, Z.; Yao, L.; Cai, Y. Rolling bearing fault diagnosis using generalized refined composite multiscale sample entropy and optimized support vector machine. Measurement 2020, 156, 107574. [Google Scholar] [CrossRef]
- Ding, J.K.; Huang, L.P.; Xiao, D.M.; Jiang, L.L. A fault feature extraction method for rolling bearing based on intrinsic time-scale decomposition and AR minimum entropy deconvolution. Shock Vib. 2021, 2021, 6673965. [Google Scholar]
- Costa, M.; Goldberger, A.L.; Peng, C.-K. Multiscale Entropy Analysis of Complex Physiologic Time Series. Phys. Rev. Lett. 2002, 89, 068102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Costa, M.D.; Goldberger, A.L. Generalized Multiscale Entropy Analysis: Application to Quantifying the Complex Volatility of Human Heartbeat Time Series. Entropy 2015, 17, 1197–1203. [Google Scholar] [CrossRef]
- Pierezan, J.; Coelho, L.D.S. Coyote optimization algorithm: A new metaheuristic for global optimization problems. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 2633–2640. [Google Scholar]
- Li, H.; Li, Z.; Mo, W. A time varying filter approach for empirical mode decomposition. Signal Process. 2017, 138, 146–158. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inf. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Weerakoon, S.; Fernando, T. A variant of Newton’s method with accelerated third-order convergence. Appl. Math. Lett. 2000, 13, 87–93. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl. -Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Huang, D.R. A sufficient condition of monotone cubic splines. Math. Number Sin. 1982, 2, 214–217. [Google Scholar]
- Chen, Q.; Huang, N.; Riemenschneider, S.; Xu, Y. A B-spline approach for emipirical mode decompositions. Adv. Comput. Math. 2006, 24, 171–195. [Google Scholar] [CrossRef]
- Ma, J.; Li, Z.; Li, C.; Zhan, L.; Zhang, G.-Z. Rolling Bearing Fault Diagnosis Based on Refined Composite Multi-Scale Approximate Entropy and Optimized Probabilistic Neural Network. Entropy 2021, 23, 259. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| - | ECI | OI | RMSE | Output SNR |
|---|---|---|---|---|
| TVF–CEITDAN | 0.9471 | 0.0054 | 0.0802 | 7.8293 |
| CEEMDAN | 0.5512 | 0.7666 | 0.3223 | 1.7135 |
| ITD | 0.5915 | 0.2876 | 0.2870 | 1.7978 |
| Ball Number N | Pitch Diameter D | Roller Diameter d | Contact Angle α |
|---|---|---|---|
| 14 | 46 | 7.5 | 0 |
| Bearing Fault | Equation |
|---|---|
| Bearing cage (FTF) | |
| Bearing roller (BSF) | |
| Bearing outer race (BPSO) | |
| Bearing inner race (BPFL) |
| Mehtod | ECI | OI | RMSE |
|---|---|---|---|
| TVF–CEITDAN | 0.9389 | 0.0067 | 0.0932 |
| CEEMDAN | 0.5234 | 0.5346 | 0.3756 |
| ITD | 0.5625 | 0.3795 | 0.3472 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Han, S.; Li, C.; Zhan, L.; Zhang, G.-z. A New Method Based on Time-Varying Filtering Intrinsic Time-Scale Decomposition and General Refined Composite Multiscale Sample Entropy for Rolling-Bearing Feature Extraction. Entropy 2021, 23, 451. https://0-doi-org.brum.beds.ac.uk/10.3390/e23040451
Ma J, Han S, Li C, Zhan L, Zhang G-z. A New Method Based on Time-Varying Filtering Intrinsic Time-Scale Decomposition and General Refined Composite Multiscale Sample Entropy for Rolling-Bearing Feature Extraction. Entropy. 2021; 23(4):451. https://0-doi-org.brum.beds.ac.uk/10.3390/e23040451
Chicago/Turabian StyleMa, Jianpeng, Song Han, Chengwei Li, Liwei Zhan, and Guang-zhu Zhang. 2021. "A New Method Based on Time-Varying Filtering Intrinsic Time-Scale Decomposition and General Refined Composite Multiscale Sample Entropy for Rolling-Bearing Feature Extraction" Entropy 23, no. 4: 451. https://0-doi-org.brum.beds.ac.uk/10.3390/e23040451