1. Introduction
During the past decades, discrete complex networks (DCNs) have been extensively studied due to the potential advantages of digital simulation and calculation, such as cyber-physical systems [
1], multi-agent systems [
2,
3] and digital communications [
4]. Similar to continuous-time complex networks, DCNs are composed of plenty of nodes coupled with edge-to-edge connections where complex dynamic behaviors are included. Hence, studies of the structure, nature and application of DCNs are richly reported in existing literature [
5,
6,
7,
8,
9]. For instance, Phat et al. designed the switching rule for stability of linear discrete-time systems via LMIs in [
5]. The passivity criterion of discrete-time neural networks subject to uncertain parameters was investigated in [
6]. Unfortunately, time delays inevitably appear in information transmission between network nodes, which may lead to the oscillatory or instability behavior of coupled networks. Especially in real networked systems, time-varying delays is the problem demanding optimized solutions [
10,
11,
12,
13]. In order to eliminate the influence of time-varying coupling delays, a non-fragile protocol was provided for the Markovian jump stochastic system in [
11]. The authors discussed switched complex networks with time-varying delays for strictly dissipative conditions in [
13]. Therefore, it is a meaningful attempt to analyze dynamical behaviors of DCNs with time-varying delays.
As a significant collective behavior in complex networks, synchronization shows practical significance in a coupled circuit system [
14], communication networks [
15], genetic networks [
16] and industrial internet of things [
17] and has become a hot topic of special concern in recent years [
18,
19,
20,
21]. For example, the asymptotic synchronization criteria for DCNs were derived under the periodic sampling signals in [
19] and the exponential synchronization problem is discussed via topology matrices in [
20]. It should be noted that most existing results neglected the time limitation when studying the synchronization behavior of complex networks. Besides, it is extremely difficult to realize complete synchronization (error converges to zero) in practical cases of large-scale complex network structures. Accordingly, the concept of finite-time synchronization is proposed to limit the closed-loop synchronization errors within a certain range in finite time, which has been adopted in related literature [
22,
23,
24,
25,
26]. In [
22,
23], the finite-time synchronization problems of switched neural networks affected by delays were solved based on Lyapunov stability theory. The finite-time synchronization conditions are formulated for a class of Markovian jumping complex networks with non-identical nodes and impulsive effects in [
24]. Until now, the finite-time boundedness of synchronization error in DCNs is still a challenging issue, which constitutes one of main motivations for our current study.
The Takagi–Sugeno (T-S) fuzzy model is extensively recognized as a powerful tool to deal with a nonlinear system, which can express the nonlinear systems by a set of linear subsystems combined with IF-THEN rules [
27,
28,
29,
30]. On one hand, the T-S fuzzy model is used to fuzzify system model for stability analysis. In order to ensure the stability of the closed-loop system, the authors introduced the T-S fuzzy frameworks to the chaotic system in [
28]. With regard to delayed Markovian jump complex networks in [
30], the T-S fuzzy model was also applied to describing the system nonlinearities. On the other hand, the T-S fuzzy model has been widely applied in controllers. In [
31], depending on T-S fuzzy logic, the sampled-data controller was designed to synchronized nodes of reaction–diffusion networks. In order to control complex networks containing communication couplings, Wang et al. proposed the T-S fuzzy feedback controller in [
32]. However, a majority of previous results on T-S fuzzy theory concerned the continuous-time system, which prompts us to extend T-S fuzzy model to investigate the finite-time synchronization behaviors of DCNs.
The synchronization control strategy for complex networks has received significant attention [
33,
34,
35]. In view of complex interconnection and huge network scale, it is tough to achieve the desired synchronized state through controlling all network nodes in practice applications. Hence, a pinning control scheme is proposed, which means only part of the nodes need to be directly controlled. As an economical and efficient method, pinning control has been popular in synchronization control. In [
36], the pinning synchronization problem of DCNs with time delays was addressed. In the face of partial and discrete-time couplings in networks, the authors designed the pinning sample-data controller in [
37]. In addition, the utilization of controller resource is always a focus of concern [
38,
39]. Recently, along with the advance of digital communication and network techniques, the event-triggered mechanism has been presented to govern the transmission of control signals in practical applications of networked systems, such as sensor networks [
40], chaotic circuit networks [
41] and multiagent networks [
42]. By the event-triggered mechanism, control signals would be updated only if the prespecified triggering condition is satisfied, which means needless resource consumption can be restrained. For example, an event-triggered approach was employed in [
43] to design an adaptive sliding mode controller for the stability of a quantized fault system. Furthermore, many efforts are made to improve existing triggering algorithms for less resource consumption. In [
44,
45], an internal adaptive threshold, also named a dynamic variable, was introduced to form the adaptive event-triggered approach (AETA) to decrease triggering frequency without information packet loss. The related result was also extended to design the state estimator of neural networks in [
46]. Based on AETA, energy utilization is further improved in the control process of communication networks and the network congestion is greatly avoided, especially in power systems, wireless networkes and so on. Nevertheless, it is worth noting that finite-time pinning synchronization control for T-S fuzzy DCNs with time-varying delays and couplings under AETA is still a research gap, which motivates us to conduct the study.
Motivated by above discussions, this paper focuses on the finite-time synchronization problem of delayed and coupled TSFDCNs via adaptive event-triggered pinning control strategy. The main contributions of this paper are summarized as follows:
(1) A more general model of DCNs subject to time-varying delays and node couplings is proposed, which extends the existing continuous-time system model and improves the description of discretized dynamic behaviors. By fuzzy membership functions connected by IF-THEN rules, the T-S fuzzy model of DCNs is novelly constructed to analyze the discrete synchronization behaviors;
(2) Based on the adaptive threshold and system errors, a discrete AETA is applied in controller design. By introducing the adaptive triggering condition, the update frequency of control signal is effectively restricted, such that communication resource is saved. Due to the non-negativity of the threshold variable, AETA can decrease the generated event triggering instants compared with static or period triggered mechanisms;
(3) To design effective fuzzy pinning controller, sufficient finite-time synchronization criteria are obtained in terms of LMI constraints and the minimum finite time related optimization condition. According to finite-time control theory and discrete Jensen inequality, less conservative Lyapunov–Krasovskii functionals are established to guarantee the finite-time convergence of synchronization errors;
(4) The effectiveness and generality of the proposed theoretical method are displayed fully. In three various network systems, especially a practical chaotic network, finite-time synchronization can be achieved with fast convergence speed compared with existing methods. Furthermore, it has been shown that the triggering performance of AETA is superior by several comparative experiments.
The rest of this paper is organized as follows:
Section 2 provides the formulation of the problem and some requisite preliminaries.
Section 3 expounds the main results with proofs of two theorems. Numerical examples are illustrated in
Section 4. Finally,
Section 5 exhibits the conclusion and outlook.
2. Problem Formulation and Preliminaries
In this paper, we consider a class of DCNs with time-varying delays and
N coupled nodes with the following model:
where
denotes the state vector of the
ith node,
is real constant matrices,
and
are known matrices with appropriate dimensions,
c represents the coupling strength between nodes.
is the coupled configuration matrix of the network, where
if there is a connection from
j to
i , otherwise
. The diagonal elements of matrix
G are defined as
, which means
.
is an inner coupling matrix with
for
. The exogenous disturbance input
satisfies:
and are nonlinear activation functions of nodes, is the time-varying delay with for . The initial state of system (1) is for .
Suppose
is the state of the unforced target node:
where
represents the state vector of the target node to be synchronized by DCNs (1).
and
follow the activation functions given in state Equation (
1).
denotes the initial value for
.
By
=
, the error system is derived as:
where
is the synchronization error dynamics between states of network node and target node.
,
,
. Due to the existing of node couplings in DCNs,
in the error system (4) possesses the same coupling relation for
.
Remark 1. The states of the presented DCNs and target node contain state vectors, activation functions with and without time delays, which can flexibly describe dynamics of practical systems via changing weight matrices. By assigning the initial values, the dynamic behaviors of and are determined, such that synchronization errors are measured.
With the T-S fuzzy model composed of a set of IF-THEN rules, we consider the following fuzzy rule for TSFDCNs:
IF
is
and … and is
, THEN
where
are premise variables,
are fuzzy sets,
,
r is the number of fuzzy rules. In order to achieve synchronization, the control strategy is introduced to error system (5). By the weighted average fuzzy inference method, the controlled error system is inferred as:
where
is the control input vector. By means of the technique used in [
22,
27,
29], the normalized membership function
should satisfy:
where
stands for the grade membership of
in
. Assume that
,
for any
then we obtain
and
.
To improve controller utilization, the following event-triggered condition including adaptive threshold is introduced:
where
is the
triggered instant of
node,
,
is the next triggered instant
,
is the state error between control input updates,
is the triggered state of error system
.
and
are positive constant scalars,
is a known weighting matrix. The interval adaptive threshold
satisfies:
where
is a given constant,
is the initial value of
.
Remark 2. Based on the dynamic event-triggered mechanism in [40,44], we further propose the adaptive event-triggered condition (7) for the synchronization control of DCNs. Compared with conventional periodic event-triggered and static event-triggered mechanisms, AETA improves the constraint of triggering instants of controller. The event-triggered condition (7) varies in an iterative form by the change of internal adaptive threshold . It is obvious that the triggering performance is affected by parameters and . The triggering frequency grows as becomes closer to zero, while the rise of leads to the decline of update frequency. Involved in AETA, and can be adjusted flexibly in practical systems and the burden of controller communication will efficiently decrease. Remark 3. The adaptive event-triggered condition is constructed according to synchronization error and absolute error . In order to simplify the calculation and achieve the quantity analysis of within triggering time interval , is measured by to evaluate the absolute error between control updates.
The control input of the ith node shares the same fuzzy rule with the error system (6). Thus, the fuzzy-model-based pinning feedback controller is considered by the following rule:
Fuzzy Rule l:
IF
is
and … and
is
, THEN
where
is the feedback control gain,
is the controller parameter.
if the node is pinned, otherwise
. Note that
, the defuzzified controller
can be further described as:
Remark 4. In the existing literatures, the T-S fuzzy model is rarely applied to analysis of the dynamical behaviors of DCNs. With a combination of local linear models connected by IF-THEN rules, we novelly propose the model of TSFDCNs, which is the extension of [22,26] and widely appropriate for DCNs analysis. Moreover, the same fuzzy rule is selected to designed the fuzzy pinning feedback controller for closed-loop error system with the hope of reducing computational complexity. Substituting the controller (10) to the error system (6), the closed-loop error system of TSFDCNs is obtained. Based on the Kronecker product theory [
37,
38], we can derive the error system as follows:
where
, , ,
,
,
,
,
,
.
The following definition, assumption and lemmas are introduced to discuss synchronization criteria.
Definition 1 ([
45])
. There exist a positive matrix Φ
, positive constant scalars , , the TSFDCNs are identified as achieving the finite-time synchronized state with respect to if the error system (11) satisfies: Assumption 1 ([
18])
. For all , it exists following sector-bounded conditions:where node activation functions , are continuous and satisfy , . , , and are known real matrices with appropriate dimensions. Remark 5. In Assumption 1, (13) and (14) are both referred to a class of sector-bounded condition which is more general than the common Lipschitz continuous condition and are used to restrain system dynamics for bounded continuity. Matrices , , and are given based on functions , .
Assumption 2. In order to fully consider the synchronization error dynamics of TSFDCNs, the initial condition ofis supposed to satisfy:for, where ϖ is a known positive constant. Lemma 1 ([
46])
. For a matrix , integer and a function p: , the following inequalities hold:where , , , , , , , , , , . Lemma 2 ([
47])
. For given integers n, m, a scalar , a matrix and two matrices . Define the function as:with all vector . If a matrix such that exists, the following inequality holds: Lemma 3 ([
36])
. If , is a positive definite matrix, is a symmetric matrix, the following inequality is true: Lemma 4. For the AETA proposed by (7) and (8), with the initial value , the adaptive threshold parameter will be non-negative for if condition is satisfied where and .
Proof of Lemma 4. Based on the definition of event-triggered condition (7), it is easy to get
,
when system is controlled, which derives that:
Then, from (8), we can further obtain:
If conditions of and are satisfied, will hold for any . □
Remark 6. For event-triggered mechanism, signal transmits only when established condition is satisfied. By Lemma 4, the non-negativity of is guaranteed for all , such that it is unnecessary to ensure the inequation holding all the time when synchronization is reached, which relaxes the conditions in static or period event-triggered mechanisms. Therefore, the controller triggering frequency is reduced.
4. Numerical Experiments
In this section, numerical examples are provided to illustrate the effectiveness of the proposed synchronization strategy.
Example 1. Based on the IF-THEN rules, the TSFDCNs consisting of five nodes (N = 5) are considered as follows:
Rule 1. IF is , THEN
Rule 2. IFis, THEN
The membership functions of Rule 1 and Rule 2 are defined as
and
respectively. From the directed topological structures shown in
Figure 1, the coupled configuration matrices
and
of two fuzzy rules are chosen as:
.
Some parameters are assumed as:
, , .
The nonlinear activation functions of TSFDCNs are:
,
.
By Assumption 1, select:
,
,
The time-varying delay is taken as , where , ([a] denotes the integer part of the number a), the exogenous disturbance is set as . Let parameters , matrices .
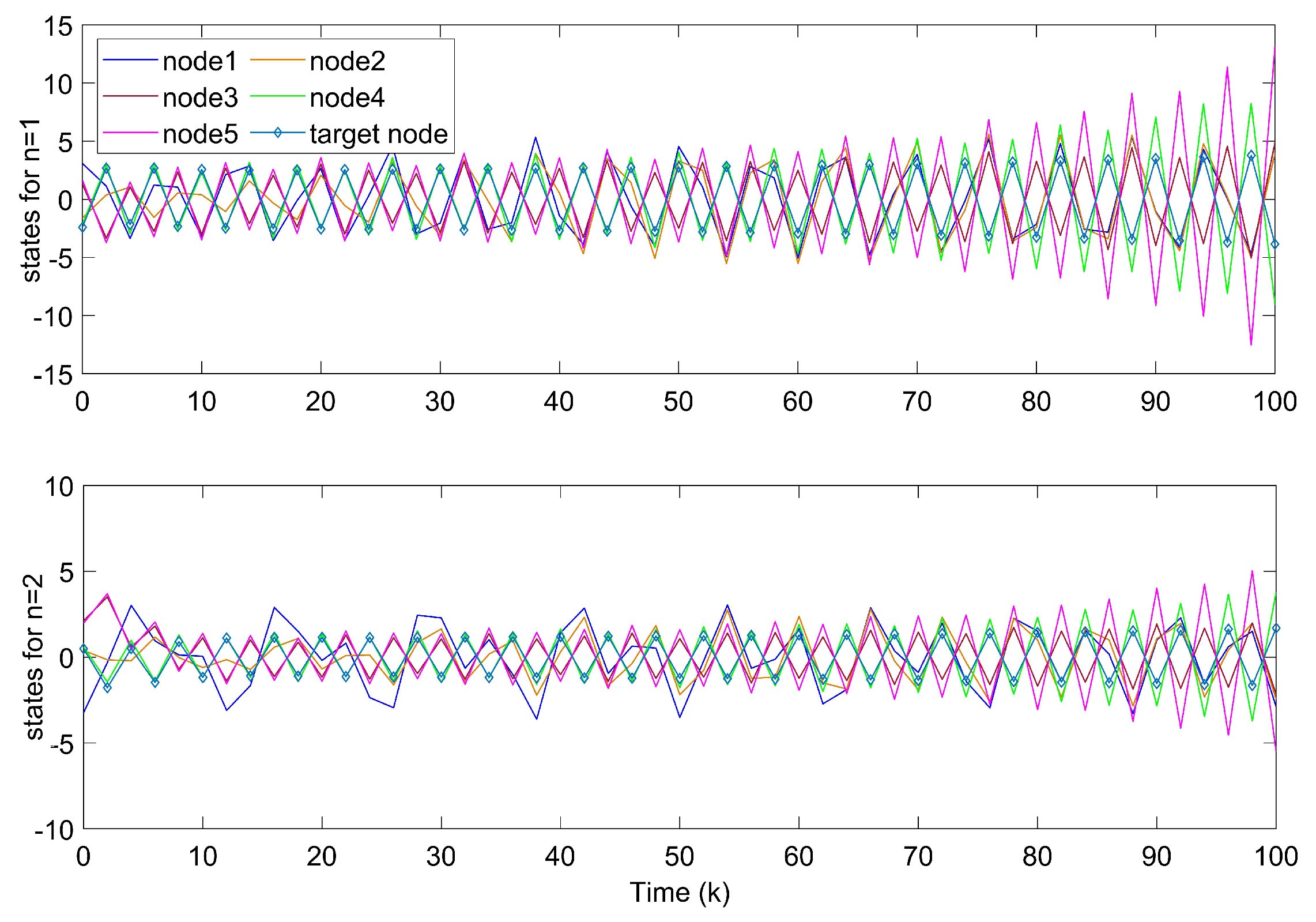
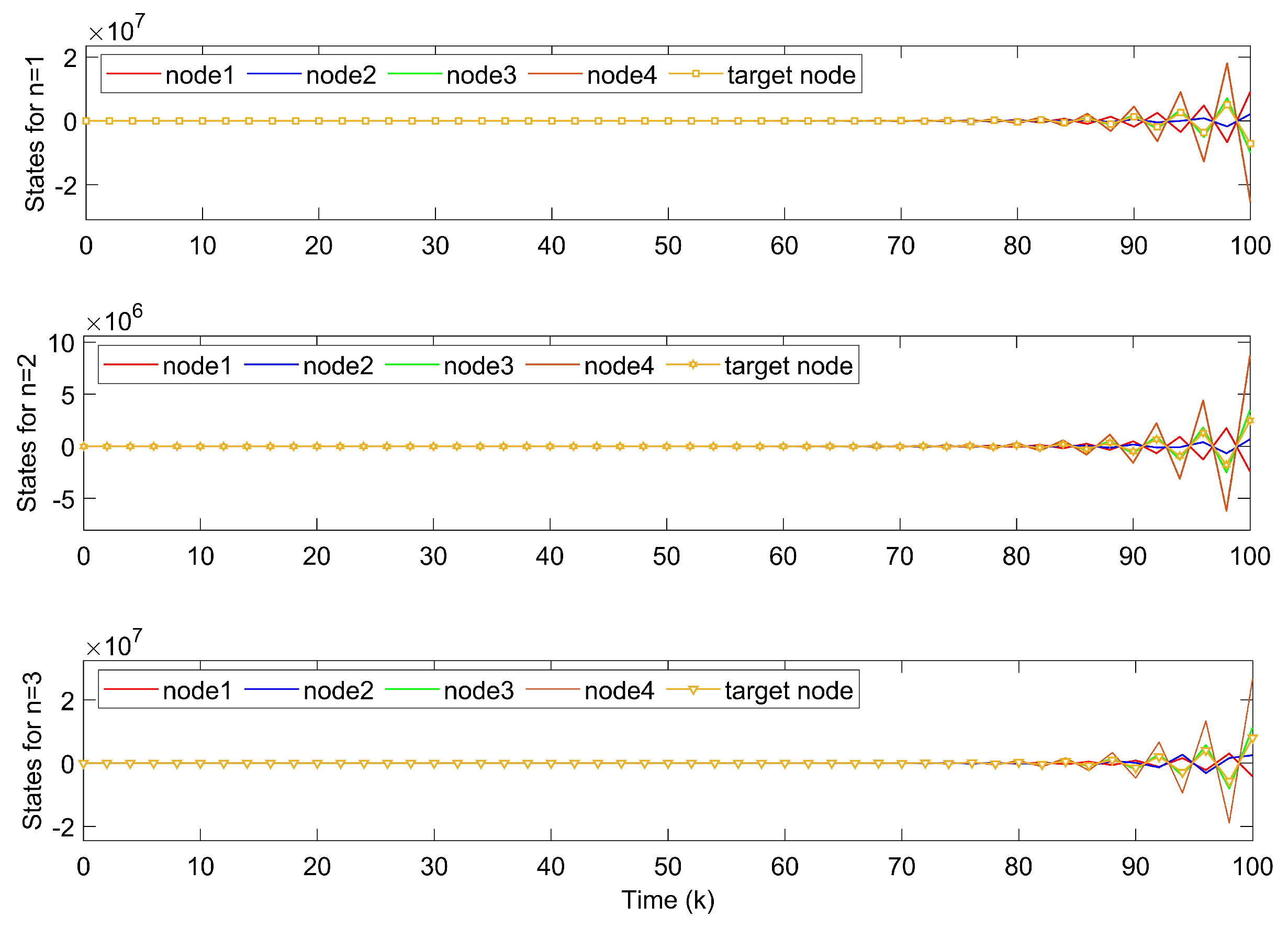
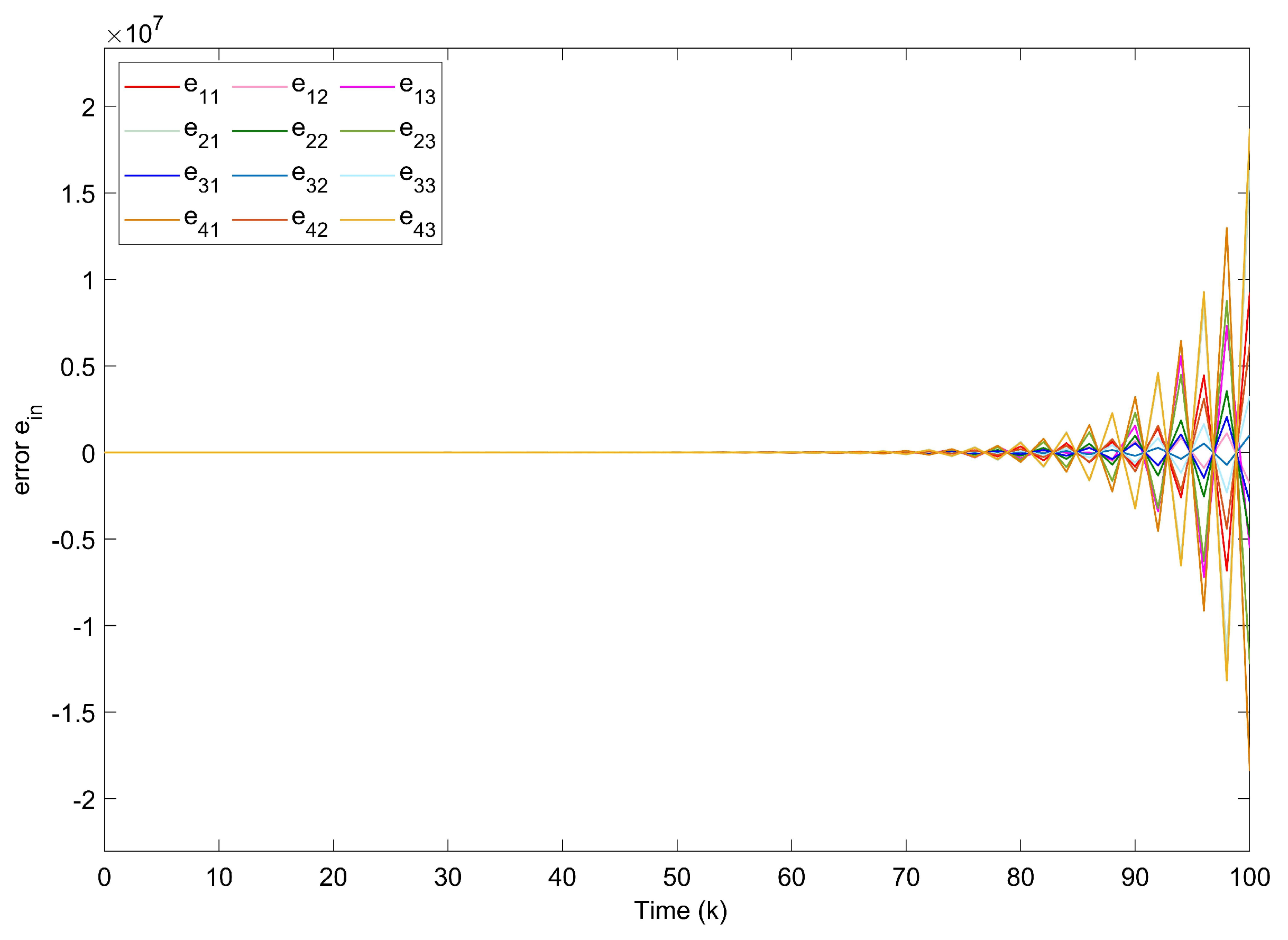
Shown in
Figure 2, the system fails to track the motion of the target node without controllers. In
Figure 3, state errors of nodes in TSFDCNs tend to diverge with time, which implies that the desired synchronization cannot be achieved.
According to Theorem 1, some parameters are chosen as , , , , , , . For adaptive event-triggered condition (7), we set , , , and . Solving the LMIs in Theorem 1, we obtain the following control gains under fuzzy rules 1 and 2 when all nodes are controlled:
, ,
, ,
, ,
,
, .
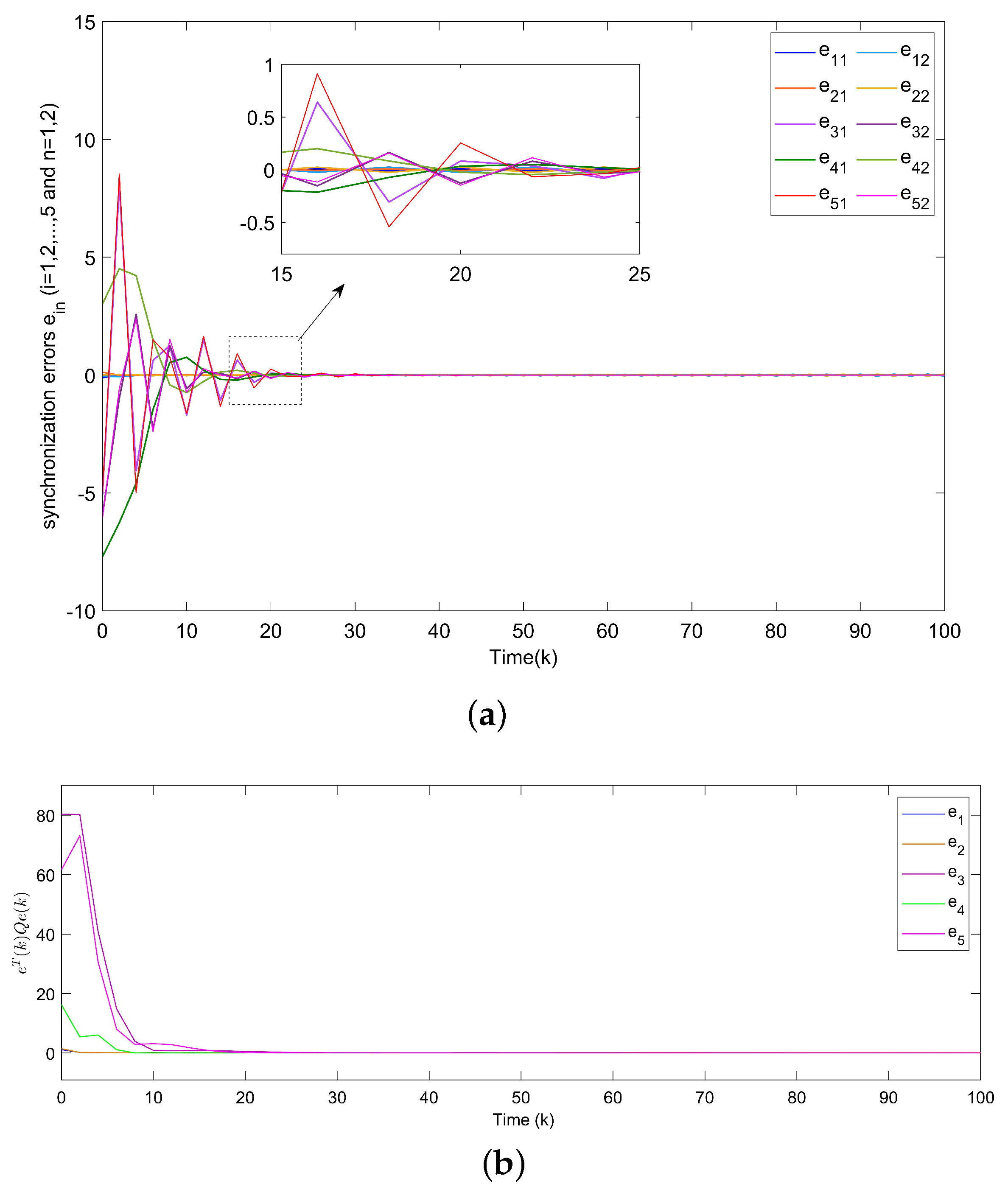
For Example 1, the initial states of nodes are selected as
,
,
,
,
, and
for
. Shown in
Figure 4a, with controllers, the closed-loop error system of TSFDCNs gradually converges to stability in finite-time. Besides,
Figure 4b displays the convergence performance of Lyapunov term
and proposed stability theory is further verified.
Figure 5 shows the trajectory of control inputs. Compared with open-loop results, controlled networks can synchronize to the isolated node.
The selection of parameter values affects the synchronization control performance of TSFDCNs. According to Theorem 1, the bounds of
are restrained by the upper bound of the time delay. Assume that
and other parameters are set as the same as in previous experiment. In
Table 1, the allowable minimum values of
for different
are solved from the presented conditions in Theorem 1, which indicates that
increases with the rise of
.
Notice that there exist two special issues with the change of parameters
and
. When
, we obtain the static event-triggered condition used in [
18]:
When
, the condition is reduced as with the periodic triggered case proposed in [
39],
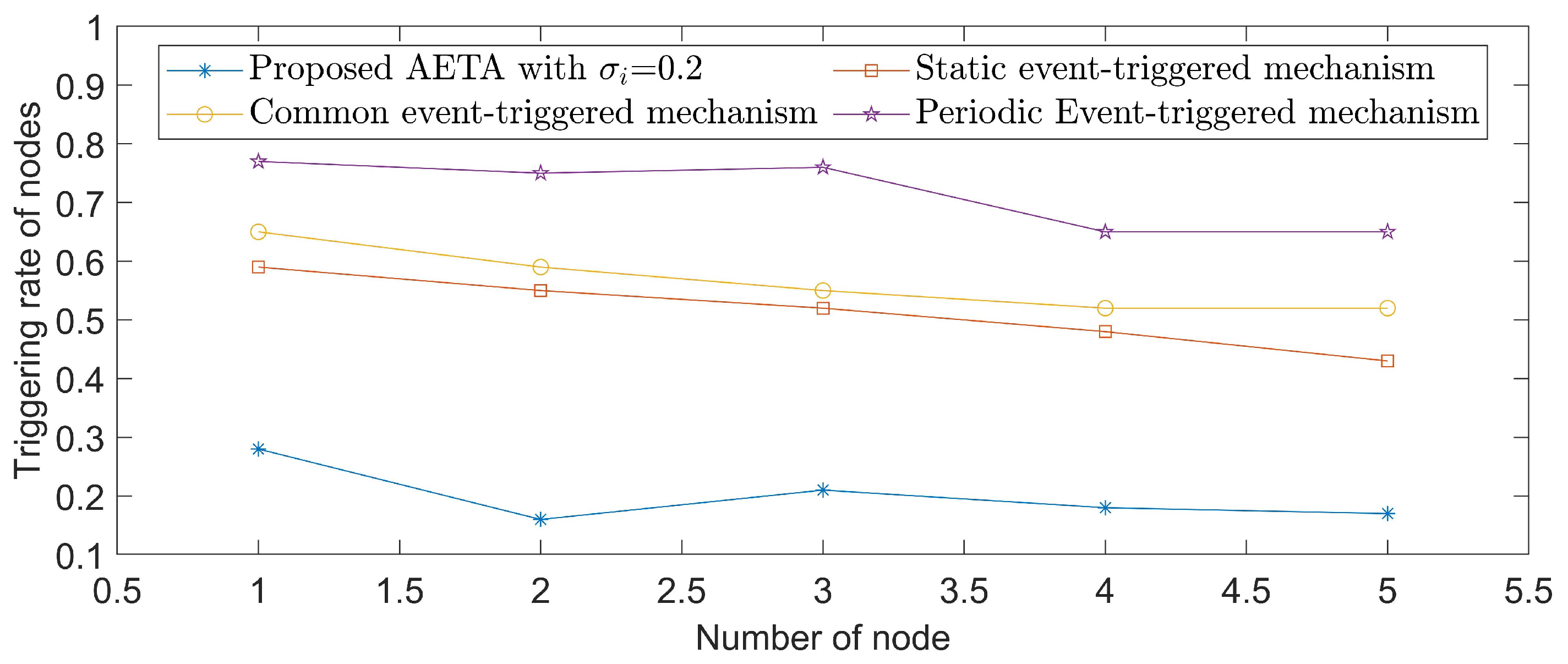
With hope to evaluate the performance, a set of experiments is conducted among four event-triggered approaches. The corresponding results are displayed in
Figure 6, where
Figure 6a shows the corresponding static triggered case in [
18],
Figure 6b shows the periodic triggered case in [
39],
Figure 6c shows the event-triggered method in [
48] and the last one represents the performance of our proposed AETA with
. It is obvious that the triggered times in
Figure 6d are far fewer than in the other three cases. The triggering rates of five nodes under different mechanisms are further shown in
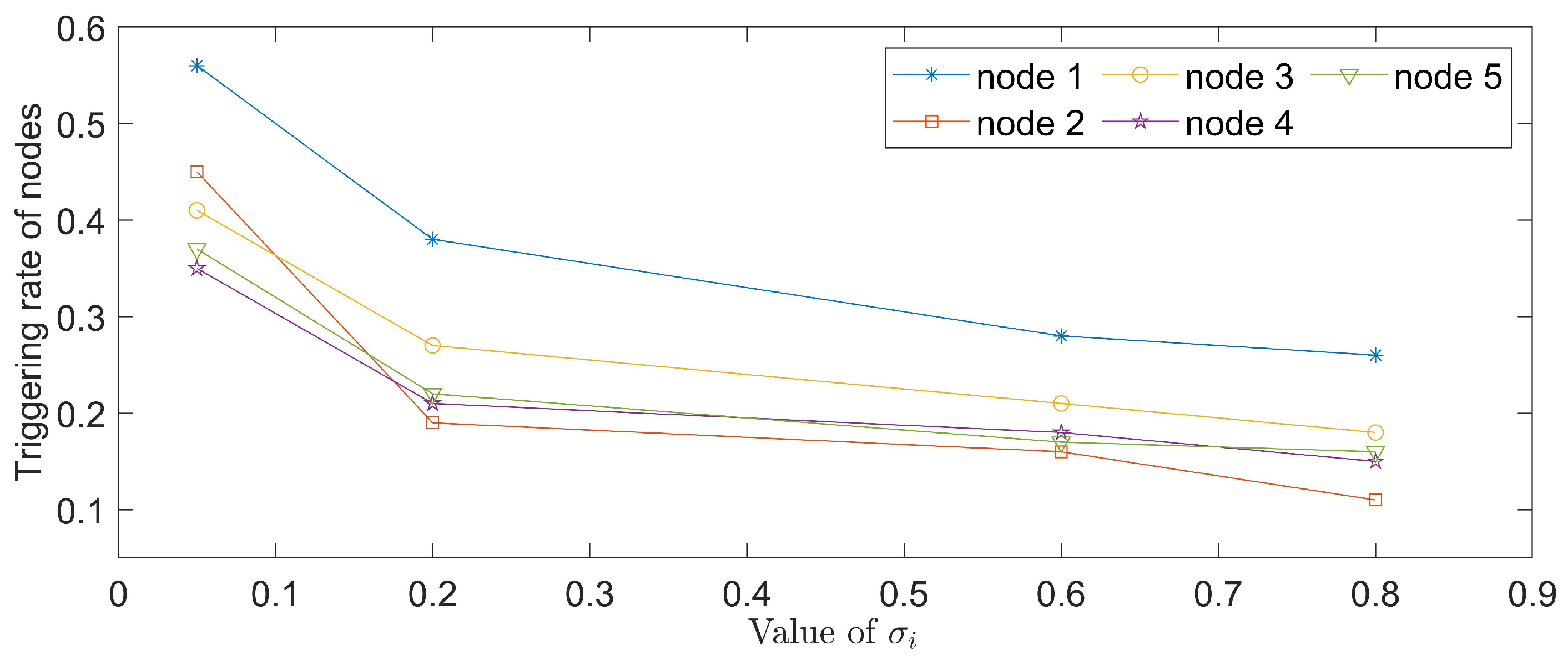
Figure 7, where parameter
is set as 0.2 and AETA is obviously superior to other methods. Based on the triggering condition (7), the triggering rate is greatly influenced by the selection of
. Then, the relationship between triggering rate and varying values of
are provided in
Figure 8.
Remark 11. To quantize results, Table 2 is given to show the average triggering rate (ATR) of network nodes under several existing methods and different values of in AETA. With respect to the index of ATR, AETA outperforms the methods in [18,39,48]. Moreover, the ATR increases gradually when the value of decreases to zero, which is also clearly reflected in Figure 8. In conclusion, the communication burden of the control process is effectively saved by AETA, compared with other event-triggered methods. Since system parameters were set in the last subsection, we introduce the method in [
29,
44] to compare system performance and related simulation results are given in
Figure 9. As shown in
Figure 9a, by Theorem 2 in [
29], the errors of the closed-loop system cannot reach the synchronized state in the setting time. By Theorem 2 in [
44], displayed in
Figure 9b, synchronization errors can converge to zero when
k gets near 50, while the optimal convergence time is
with the proposed controller in this paper. It reveals that our approach has a superior synchronization performance.
In order to further verify the usefulness of our proposed strategy in a practical system, the following example will introduce a discrete-time chaotic network to achieve the finite-time synchronization.
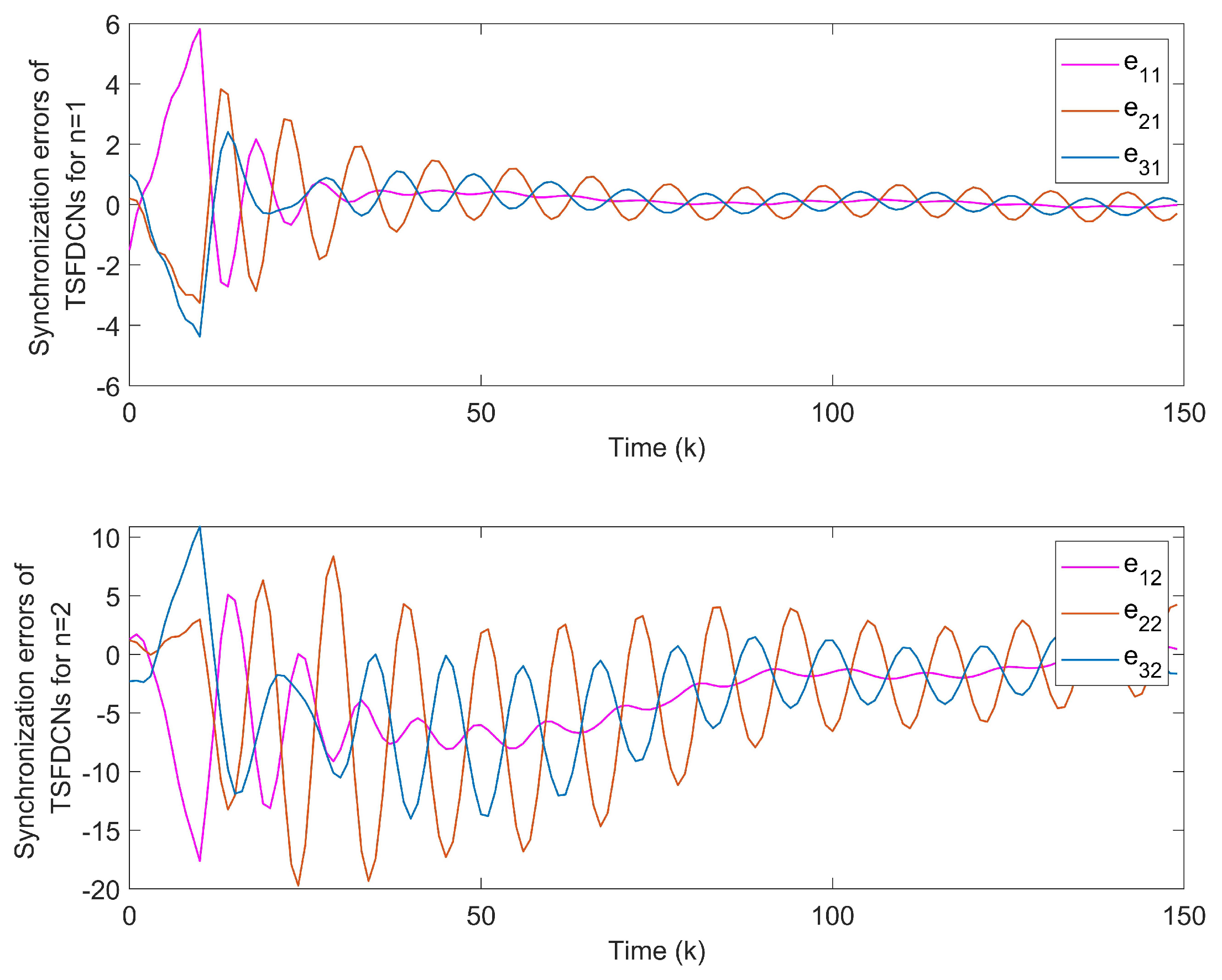
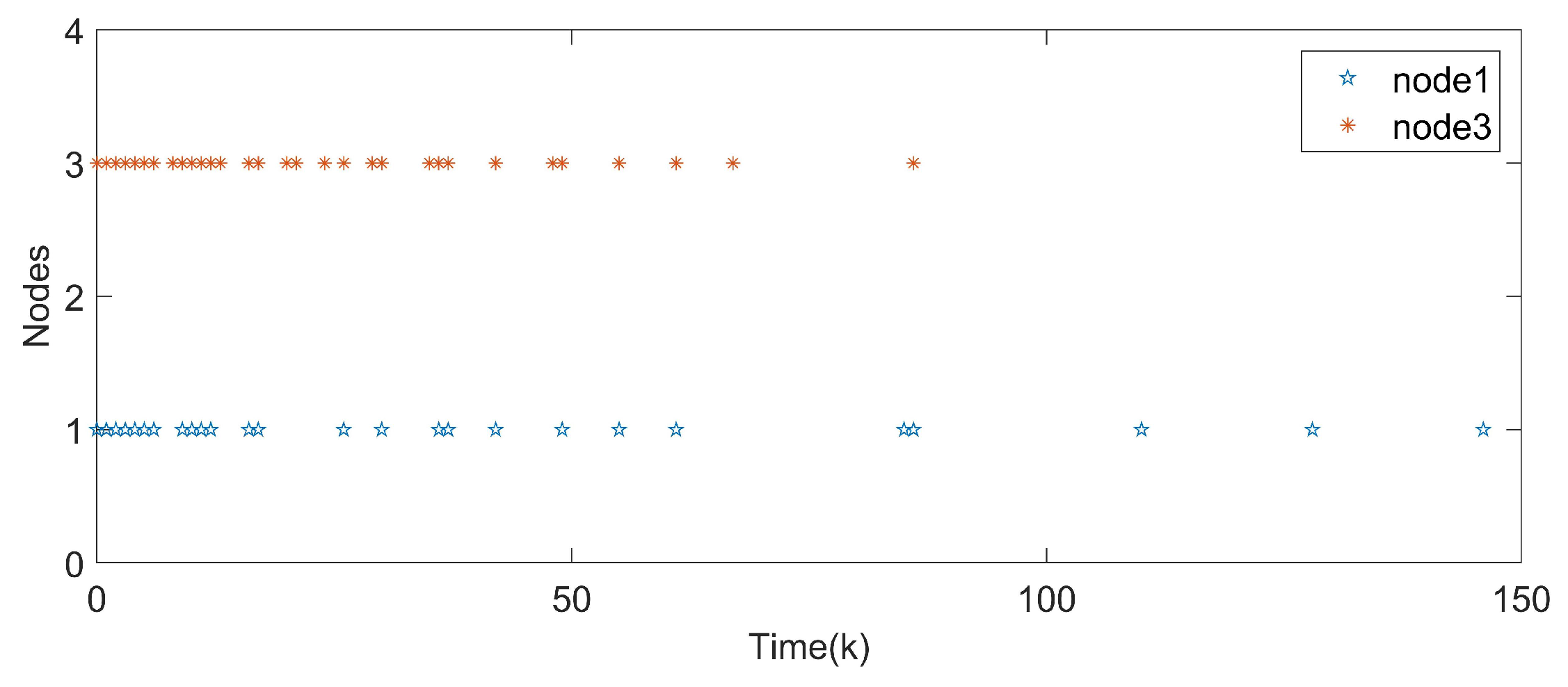
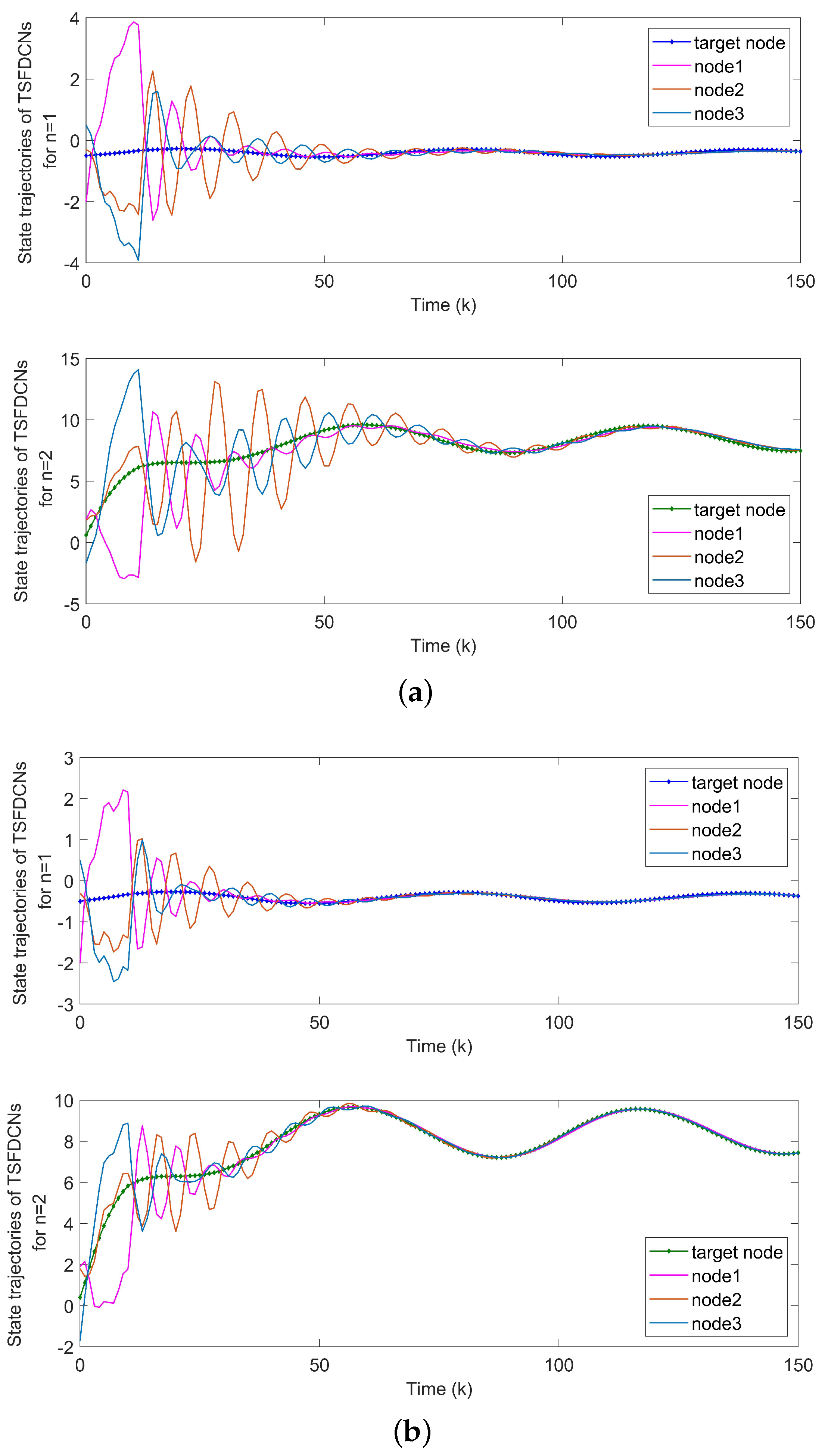
Example 2. Consider the TSFDCNs containing three nodes and each node is regarded as a chaotic subsystem, where , . Choosing fuzzy membership functions and for two T-S fuzzy rules, some parameter matrices are defined as follows:
, , ,
, , .
The node activation functions are given as:
, .
The time-varying delay for all network nodes is set as , with and . The network system also suffers from disturbance . In Figure 10, the chaotic trajectories for two fuzzy modes are demonstrated clearly under the initial condition for . In addition, let , and the undirected coupled configuration matrices for two rules as: Some system parameters are defined as , , , , , , , , and . Suppose that node 1 and node 3 are controlled by synchronization conditions in Theorem 1, we can then obtain the fuzzy controller gains as follows:
, ,
, .
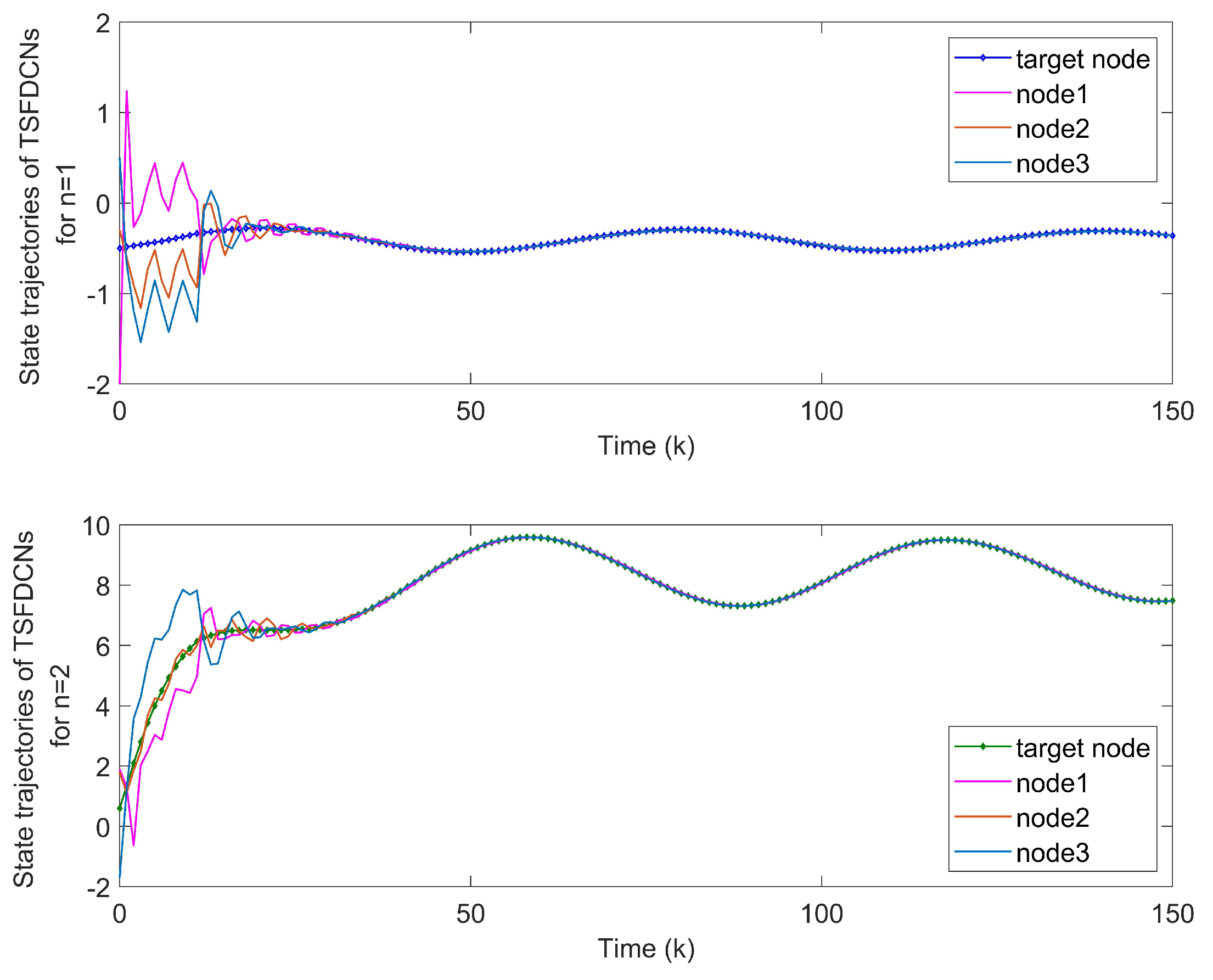
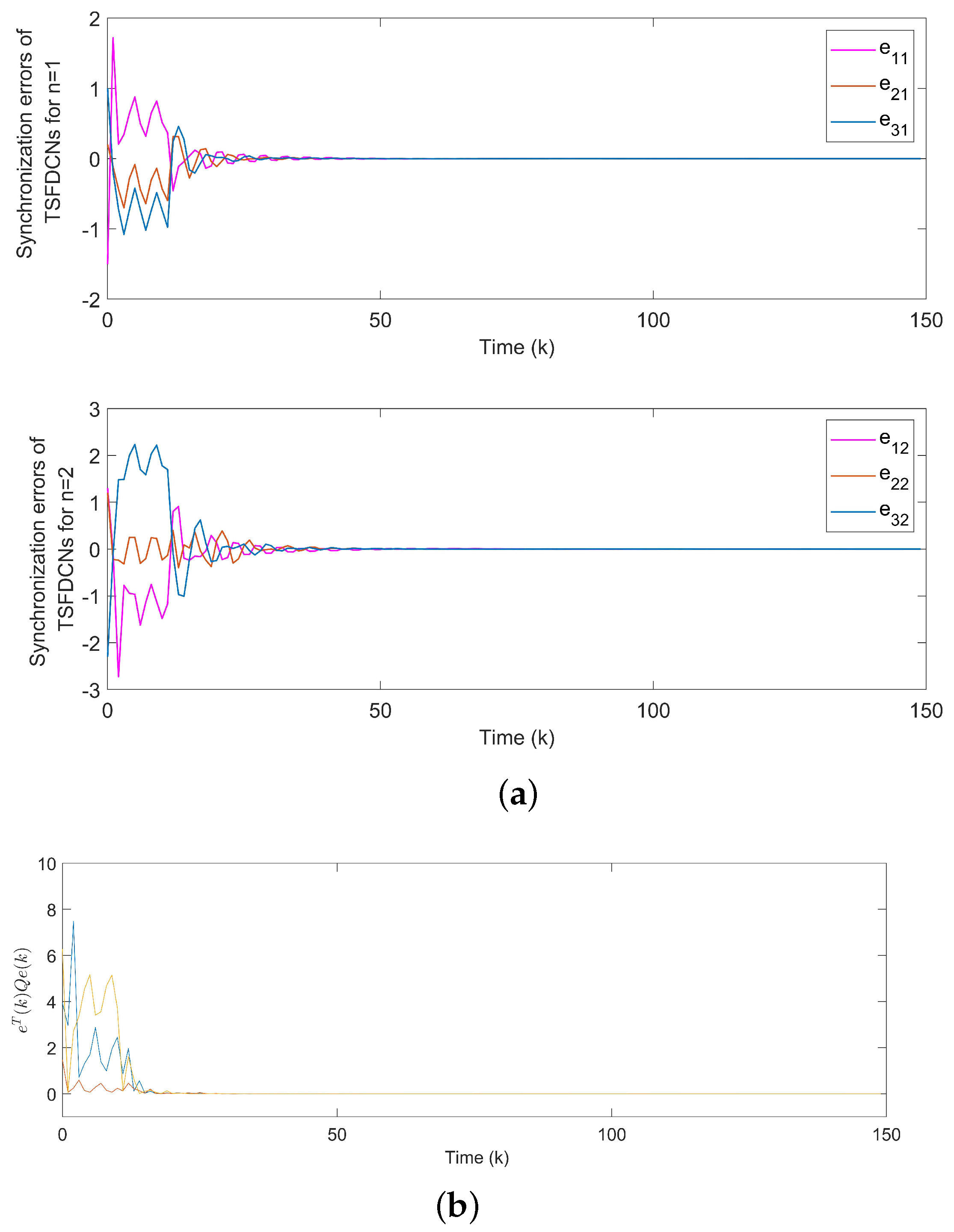
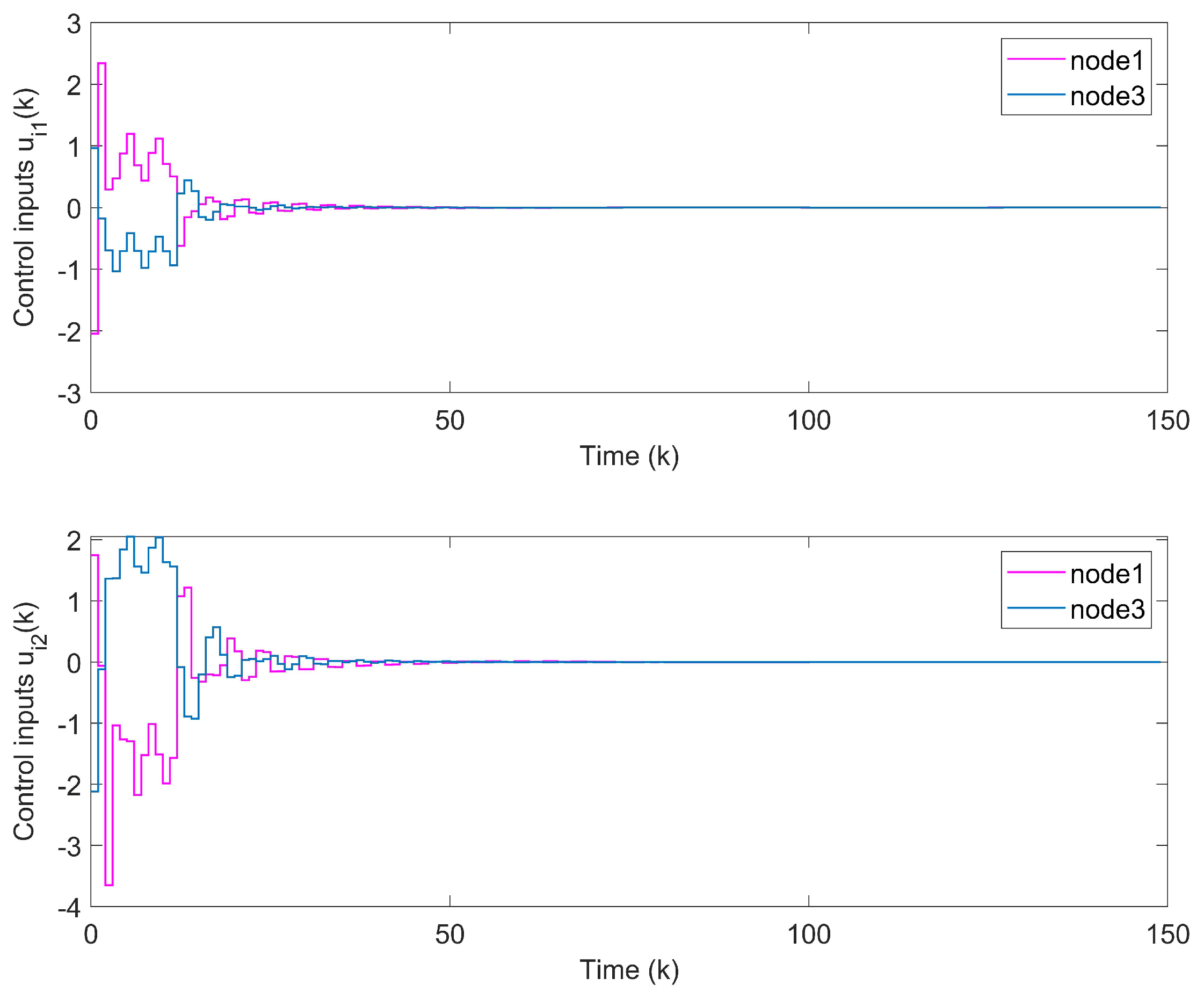
With the initial values , and , synchronization error curves of open-looped TSFDCNs are shown in Figure 11. Through introducing the control signals to nodes, the state trajectory of the target node can be tracked well by three network nodes and synchronization errors can converge in finite time, which are exhibited via Figure 12 and Figure 13. In Figure 14, the corresponding control inputs are drawn. The triggered instants of controlled nodes are given by Figure 15, where ATR is calculated as 19%. On the basis of this chaotic system, we compare the results of two existing synchronous control techniques and show them in Figure 16. Intuitively, by these two methods, the state trajectory is unable to be tracked within and oscillations are bigger. The specific convergence time is listed in Table 3; it implies that the method proposed in Theorem 1 outperforms the other two. By means of Theorem 2, the finite-time synchronization of DCNs can be achieved, which will be proved by the following example.
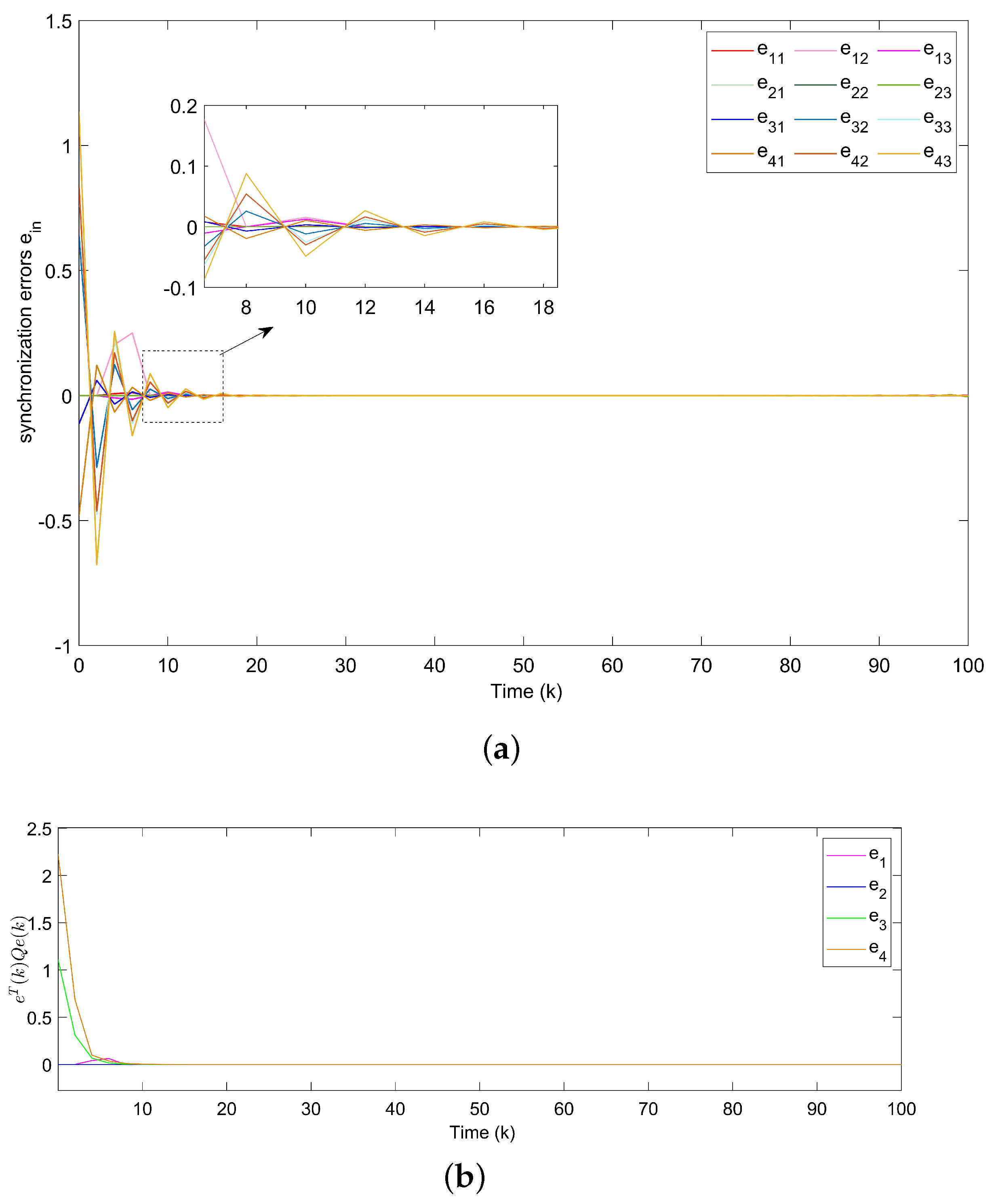
Example 3. Consider the DCNs including four nodes (N = 4) with the following parameters:
, ,
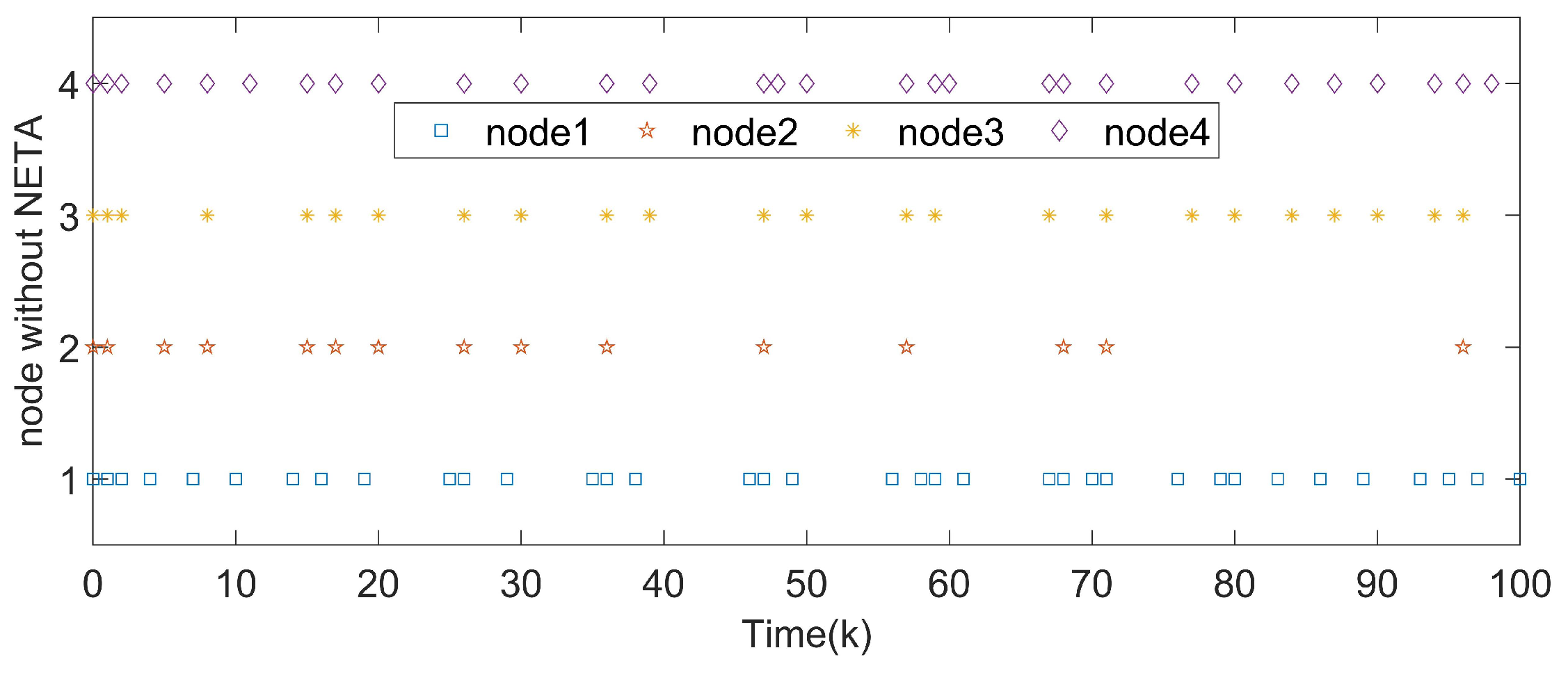
The nonlinear activation functionsandare: Let , , , and the topological structure in Figure 17 defines the coupled configuration matrix as: In simulations, we choose , , , , , , , , , and the initial system states are assumed as , , , , for . We deduce the following control gains: The states of nodes in DCNs are indicated in Figure 18. From Figure 19, we get the synchronization errors which diffuse with time mainly due to coupling effects and delays. Figure 20a indicates that states of DCNs can be ultimately finite-time synchronized, where the minimum is computed as 19. Lyapunov stability is obviously obtained by Figure 20b, where curves of are plotted. Particularly, using the model in Example 3, Table 4 provides the optimal finite time for various . It is obvious that the enlargement of results in a longer minimum convergence time. In Figure 21, the performance of the controller is displayed. The triggered instants of DCNs are depicted in Figure 22 and ATR is 25.67%. As a result, the effectiveness of the proposed theory and method is proved. 

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}