1. Introduction
Following the popularity of smart phones and the development of mobile Internet, the demands for accurate indoor positioning have rapidly grown recently. In addition to traditional map and navigation applications, location information becomes necessary for some applications such as social networking and e-commerce. Because we spend most of our time working and living indoors, a high-precision indoor positioning system (IPS) is important in many applications.
Global Positioning System (GPS) has been used in various fields, but it cannot be used indoors [
1]. In indoor environments, satellite signals cannot be used because they are highly attenuated by the walls of buildings. Furthermore, GPS signals that could be received propagate via a very complex propagation channel,
i.e., not through a line-of-sight path; thus, the propagation time cannot be directly transformed into distance.
Some researchers have proposed IPS schemes based on the Earth’s magnetic field [
2]. They used the magnetic field characteristics of buildings to position smart phones with magnetic sensors indoors. However, they focused on the positioning in one floor in a building and did not pay much attention to the positioning between floors. Majority of previous localization approaches employed Received Signal Strength (RSS) as a metric for location determination [
3]. RSS fingerprints can be easily obtained for most off-the-shelf equipment such as Wireless Fidelity (WiFi) or ZigBee compatible devices.
However, when an electromagnetic wave propagates and encounters objects such as walls and floors, reflections, diffraction, and scattering occur. RSS is influenced not only by the distance but also by any obstacles between the transmitter and receiver [
4]. Moreover, it is influenced by multipath effects. Thus, RSS is sensitive to the above factors. When we move on the same floor, the relatively large horizontal errors caused by walls or other obstacles can be tolerated, but too large an error in the height may lead to false floor detection. IPS and their applications are very sensitive to the floor selection [
1]. For instance, if a wrong floor is identified, a wrong map is selected to display the position. Determining which floor of the building level one is probably located requires a height measurement with an accuracy of better than 3 m [
5].
Traditionally, barometers are used outdoors to measure altitude and meet positioning needs. McLellan [
6] presented a method that combined a barometric altimeter and GPS to improve the GPS accuracy and prevent the influence of environment.
To date, micro-electromechanical system (MEMS) pressure sensors can achieve a relatively high accuracy. Massé [
7] even used MEMS pressure sensors to study human action (the achieved relative accuracy was 0.53 m). Because of the sensitivity of barometric sensors to vertical movements, a number of researchers [
7,
8] have used these sensors to detect vertical motions of a human body, such as standing up, sitting down, and falling.
With the miniaturization and decreasing cost of MEMS barometric sensors, they are now installed in a number of portable intelligent devices. MEMS barometric sensors have launched in a number of Android phones such as the Galaxy Nexus, Galaxy SIII, Galaxy Note 2, and other similar devices.
Recent studies on the use of MEMS barometers to increase the accuracy of satellite/inertial navigation system vertical channel are presented in [
9,
10,
11]. These papers showed that MEMS barometers can be successfully integrated with all types of sensors. In [
12], a sensor fusion method is presented to track vertical velocity and height based on inertial and barometric altimeter measurements. In [
13], smart phones with MEMS barometers were used to detect the difference in altitude in subway stations and commercial centers.
Some studies [
1,
5,
14,
15] have presented results on this subject. In [
14], data were collected from MEMS barometric sensors under several scenarios where different disturbances affect the pressure readings to determine the relevant error sources of barometers according to the altitude in the field of personal navigation. In [
5], the researchers carried out many experiments in this field. The experiments showed the feasibility in detecting the floor level using measurements by mobile device built-in barometric sensors to evaluate the altitude of the mobile devices and then comparing the altitude with the floor heights of the building. These studies were based on the assumption that the accurate floor height in a building is known. However, knowing the heights by direct measurement using instruments or from the architectural blueprints is impossible in some situations. For example, if blueprints are not available and we need to measure the accurate floor heights in a very tall building, measuring it from outside is difficult. Of course, we can measure the distance from the floor to the ceiling in a floor; however, the floor thickness is difficult to measure. To further explore this issue, we conducted an in-depth study on floor positioning without knowing the accurate height of each floor in a building.
The remainder of this paper is organized as follows: in
Section 2, we detail the theory and techniques used in the proposed method. In
Section 3, we outline the experimental evaluation of the proposed method, and we describe and analyze the results in
Section 4. In
Section 5, we present our concluding remarks.
5. Conclusions
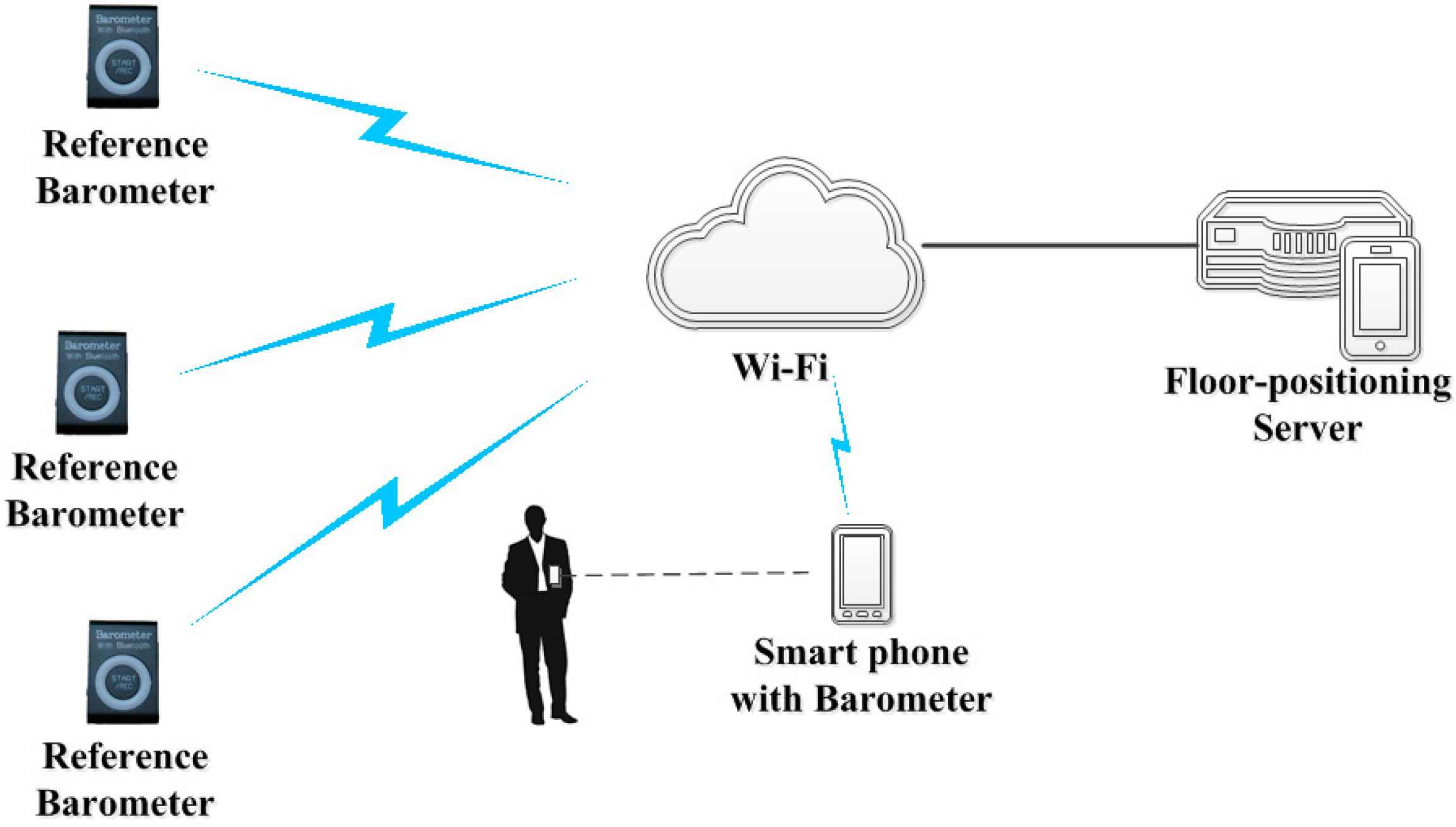
In this paper, we proposed a method (MBFP) of using multiple reference barometers for floor positioning in buildings. Compared with the previous methods that are completely based on the barometric formula, the MBFP method has the following characteristics:
It does not need to know the accurate heights of the buildings and stories; therefore, it can be more widely applied.
It is robust and less sensitive to temperature, humidity, and other similar factors.
It considers the difference in the barometric-pressure change trends at different floors and is more reasonable.
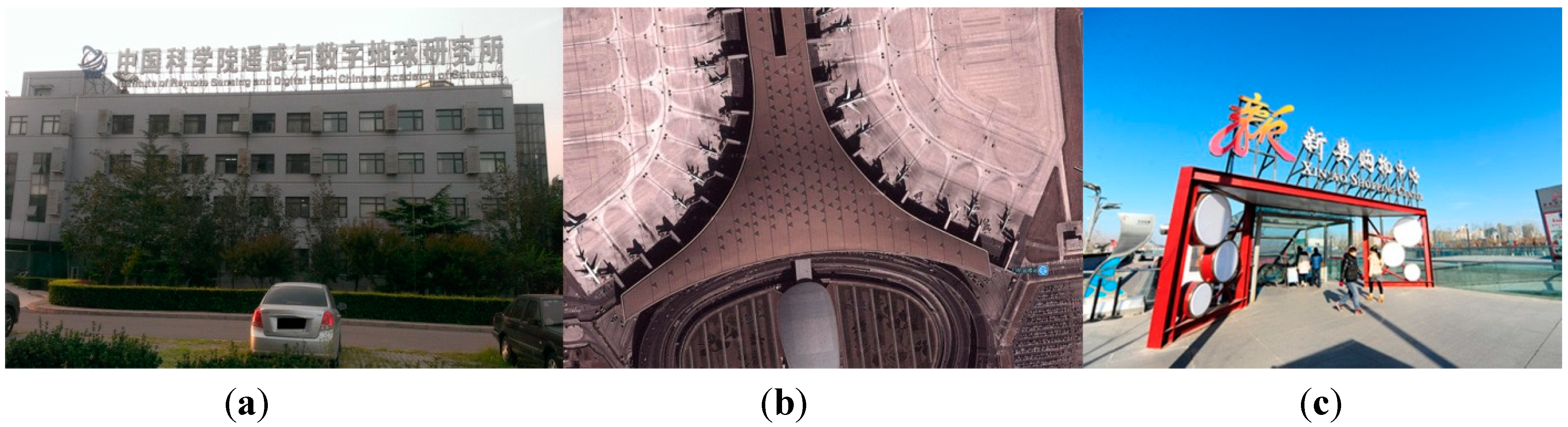
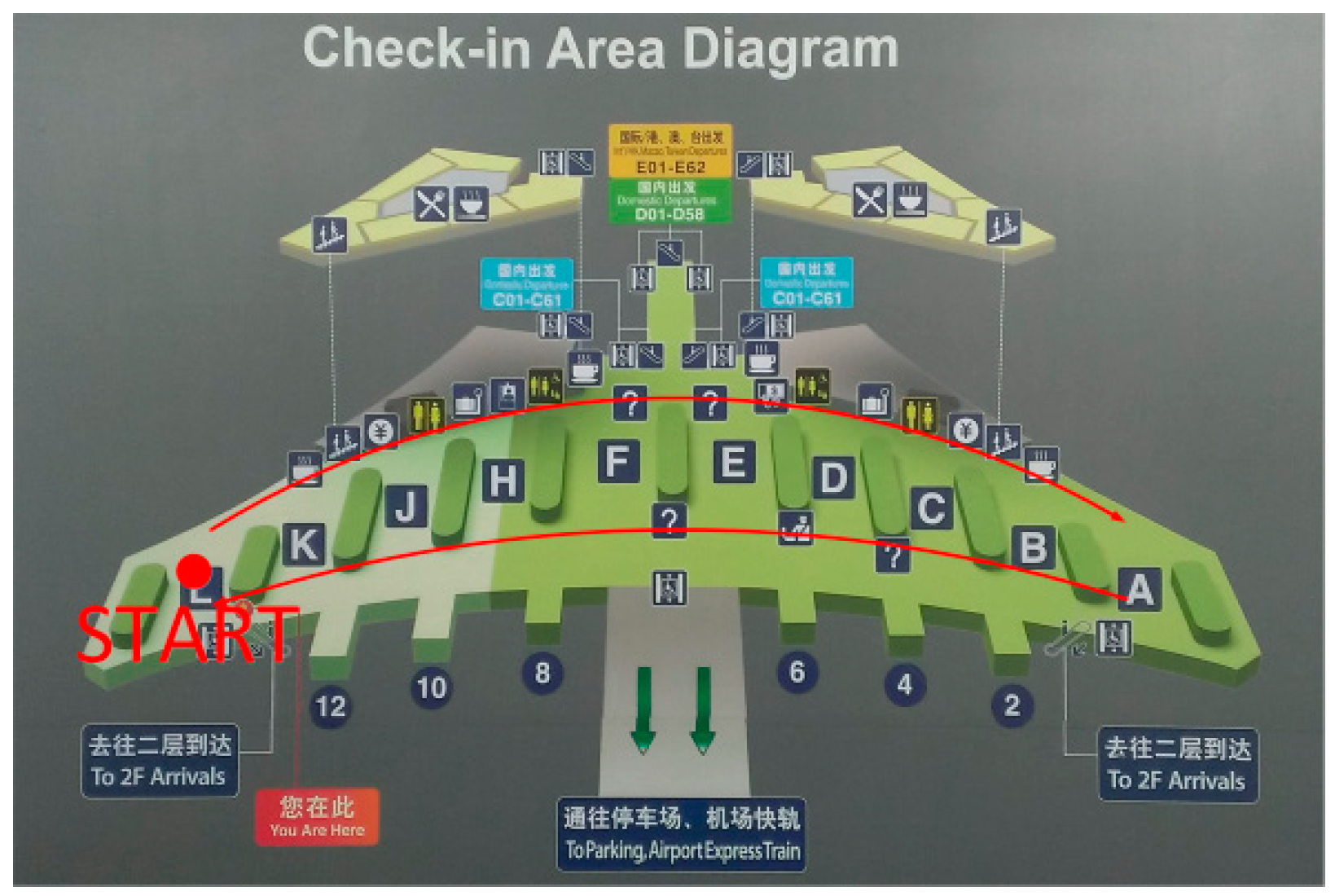
We selected three typical experimental sites, namely, an office building, an airport terminal, and an underground shopping center, as sites of our experiments. These sites include ground-level and underground facilities, large public buildings, typical office environments, and architecture with or without air conditioners. In the experiment, the phones were placed on platforms and/or carried in pockets and hands to simulate different carrying and utility modes. The experimental results show that our MBFP method performed well under these conditions. The required experimental equipment is common, inexpensive, and ubiquitously used, which validates the good adaptability of our method. In our future work, we intend to focus on the combination of MBFP with other methods that can provide indoor plane location to improve the indoor positioning precision.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







