
Fabrication and Characterization of a CMOS-MEMS Humidity Sensor

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. MOS and Conducting Polymer Based Humidity Sensor
1.2. CMOS- and CMOS-MEMS-Based Humidity Sensors
1.3. CMOS-Based Humidity Sensors
1.4. CMOS-MEMS-Based Humidity Sensors
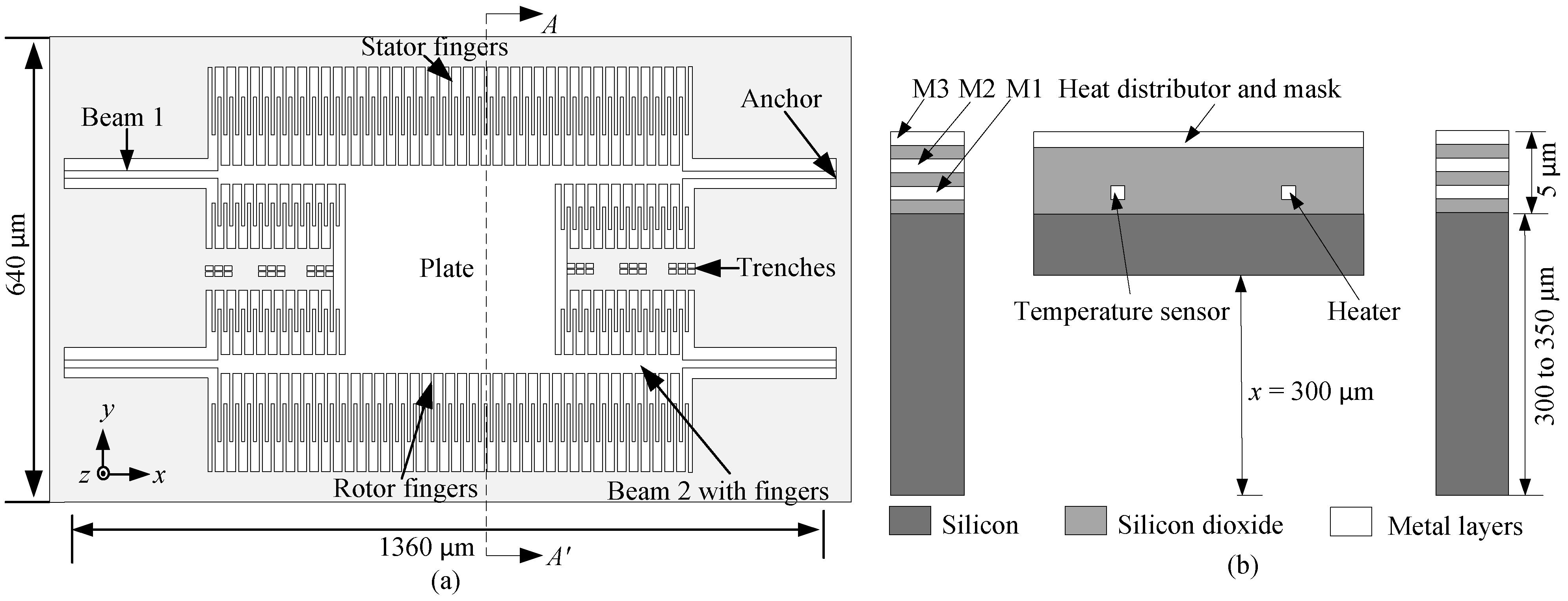
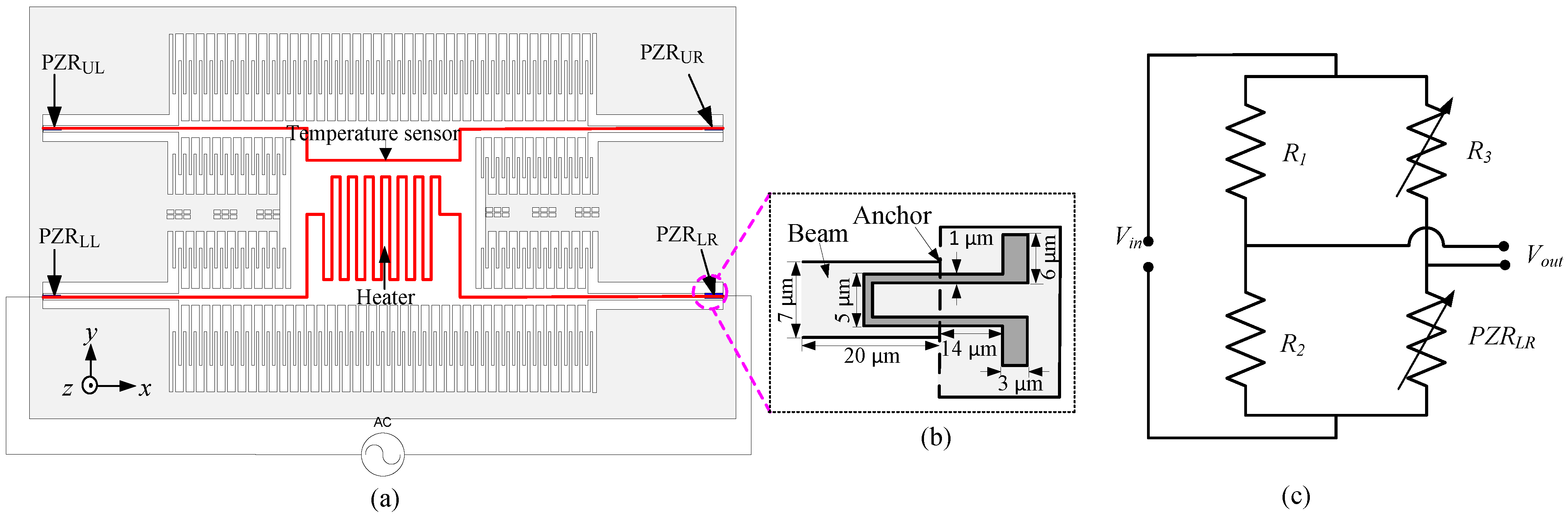
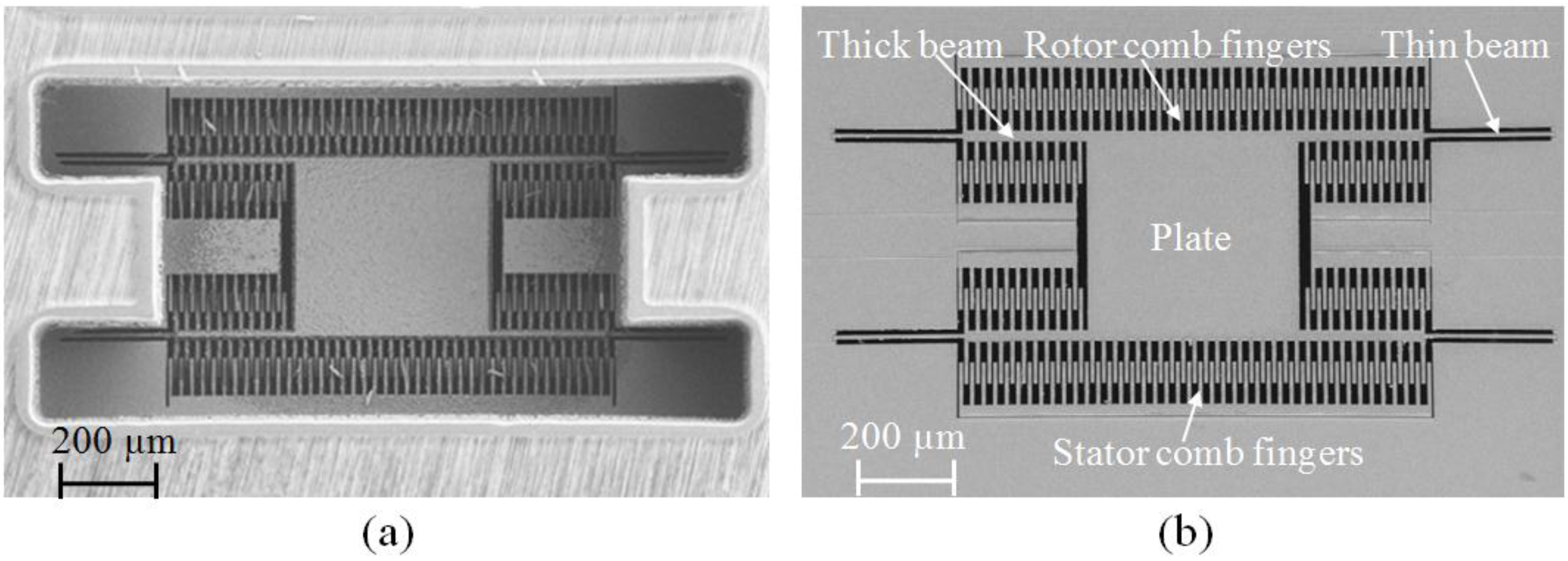
2. Fabrication and Characterization of the CMOS-MEMS Humidity Sensor
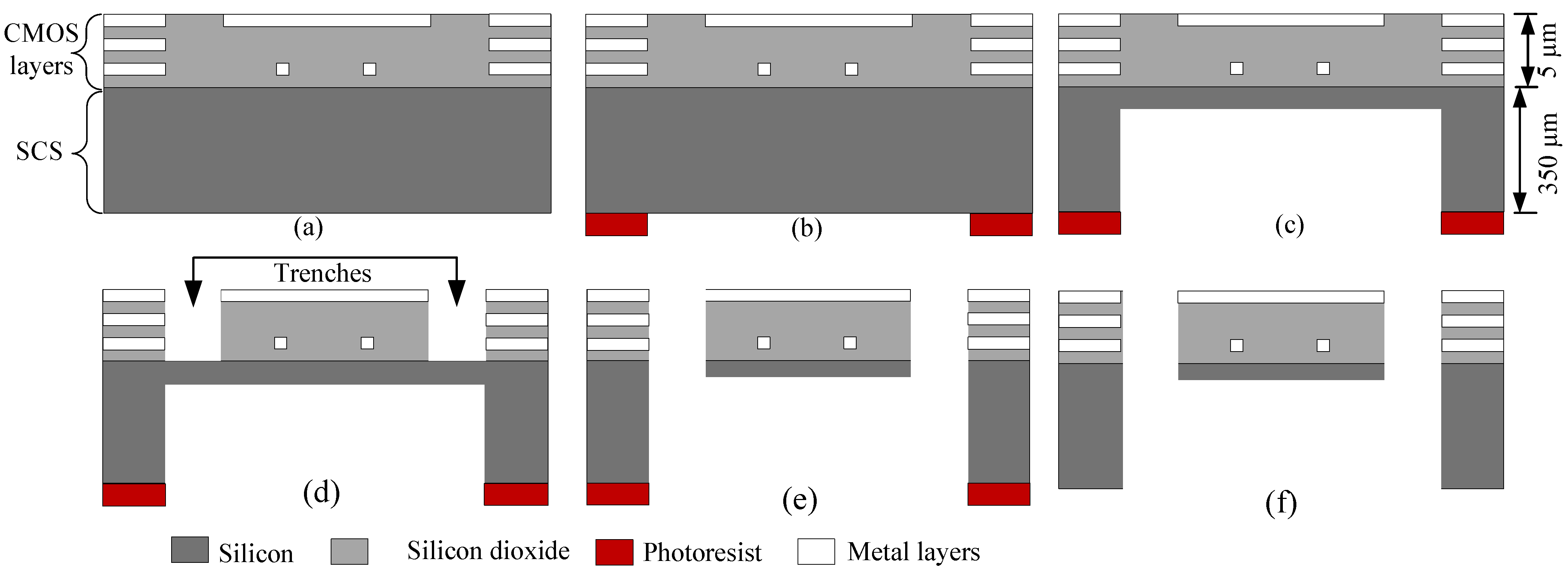
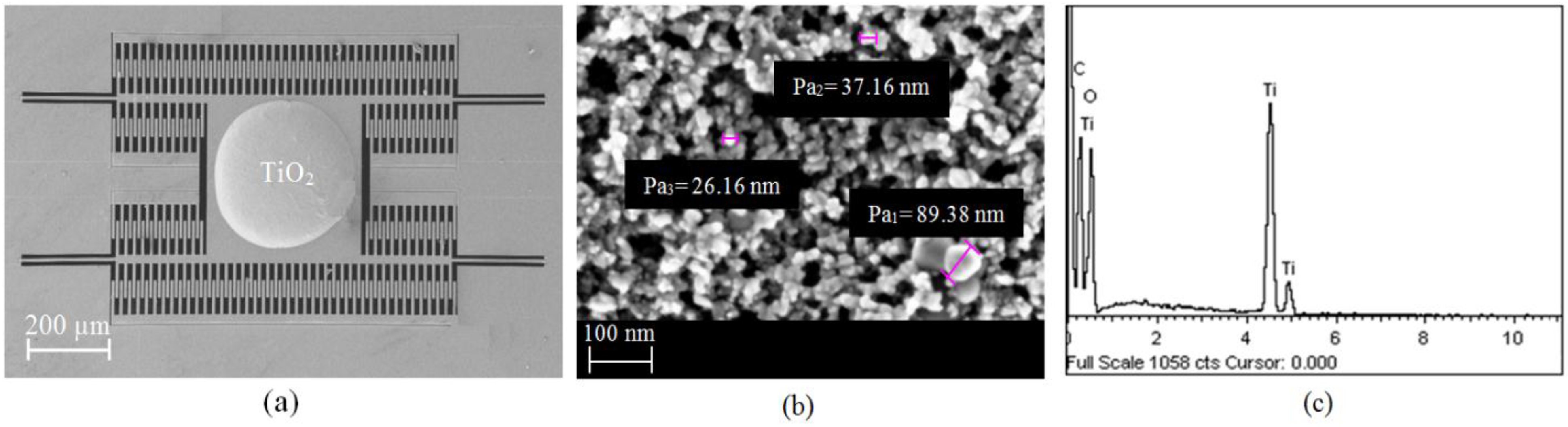
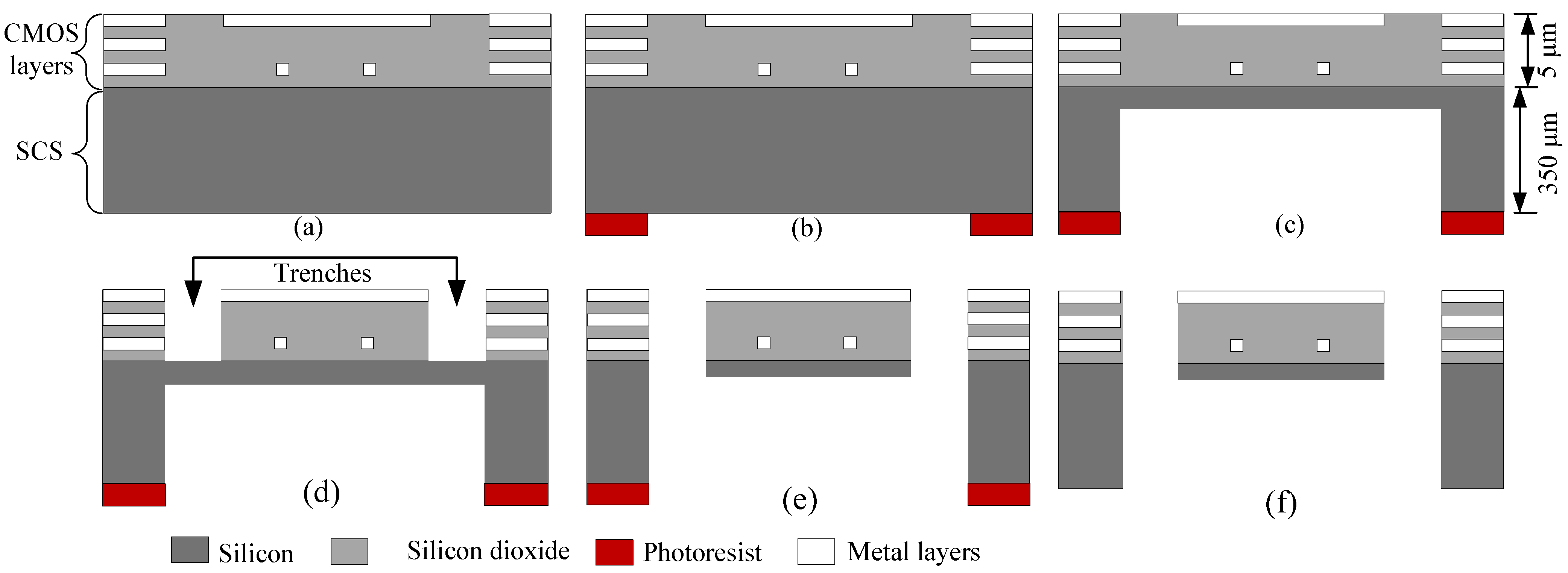
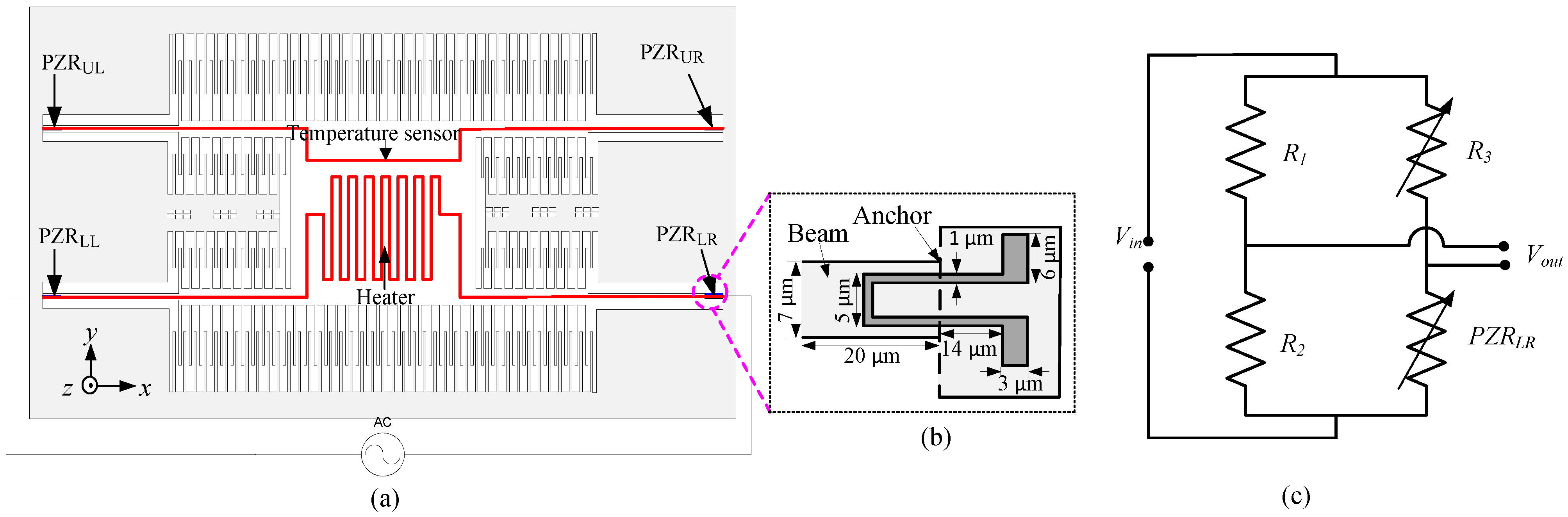
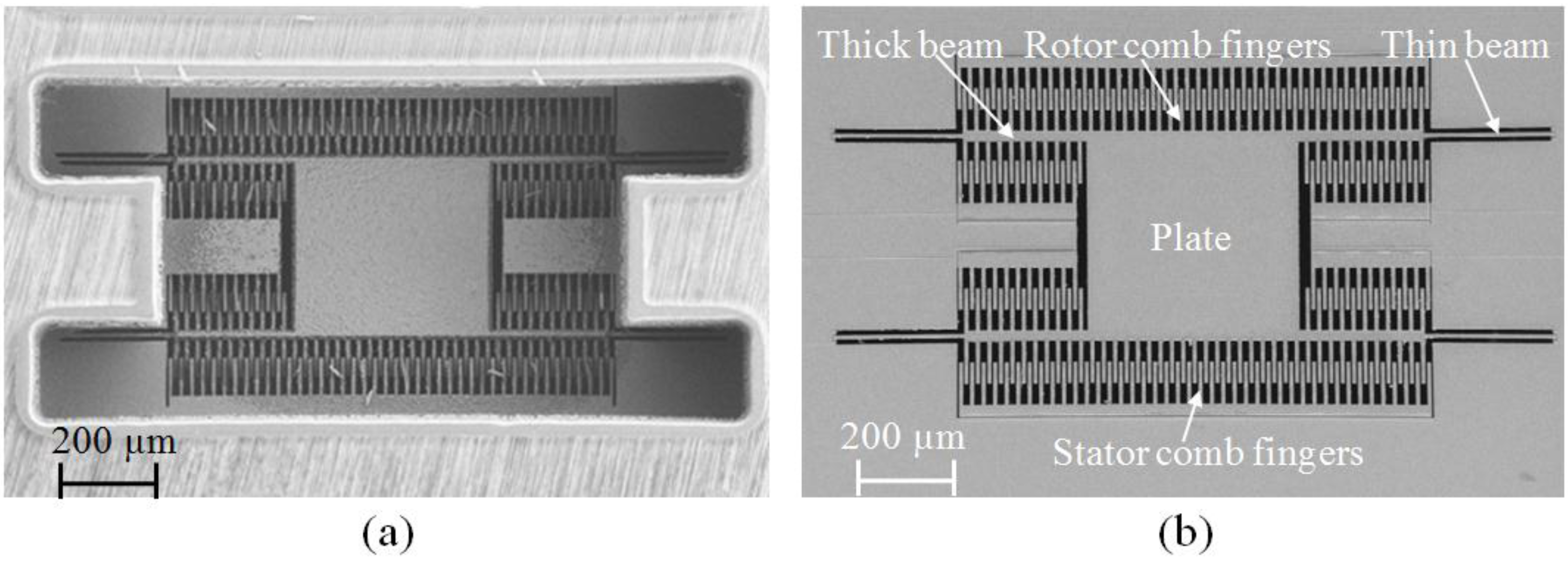
2.1. Fabrication of the Sensor

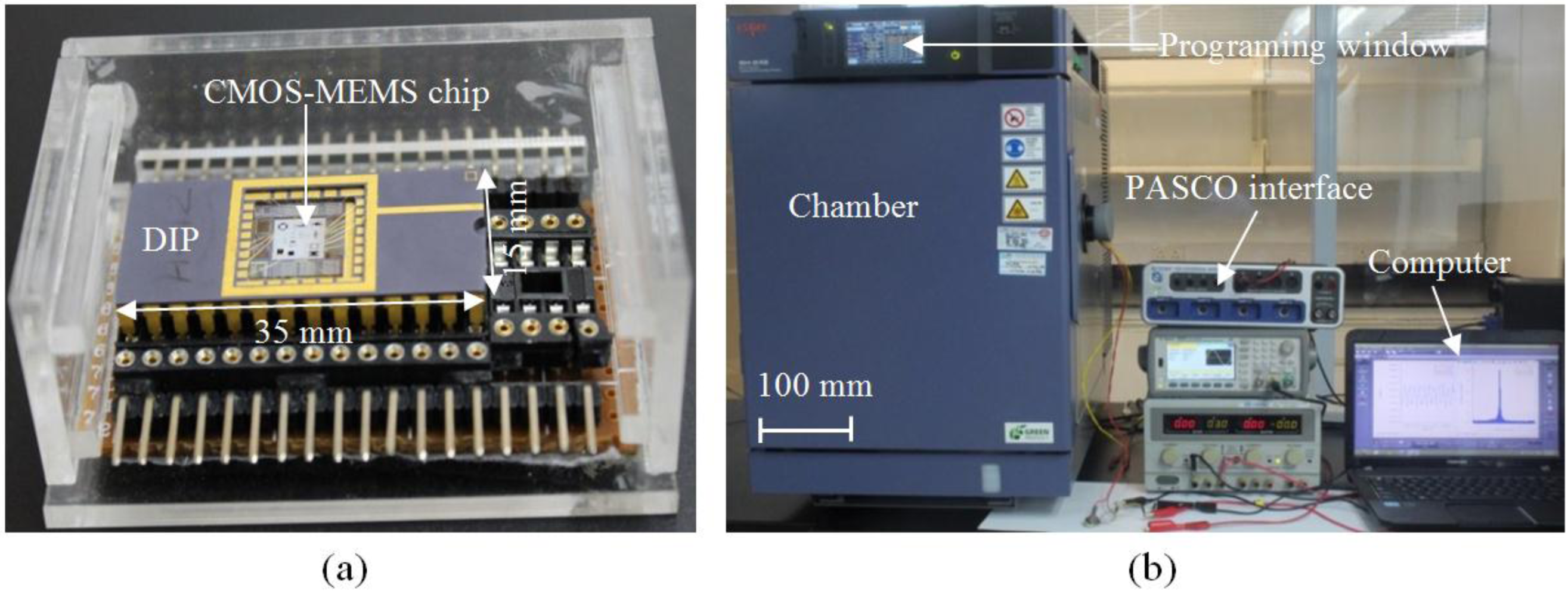
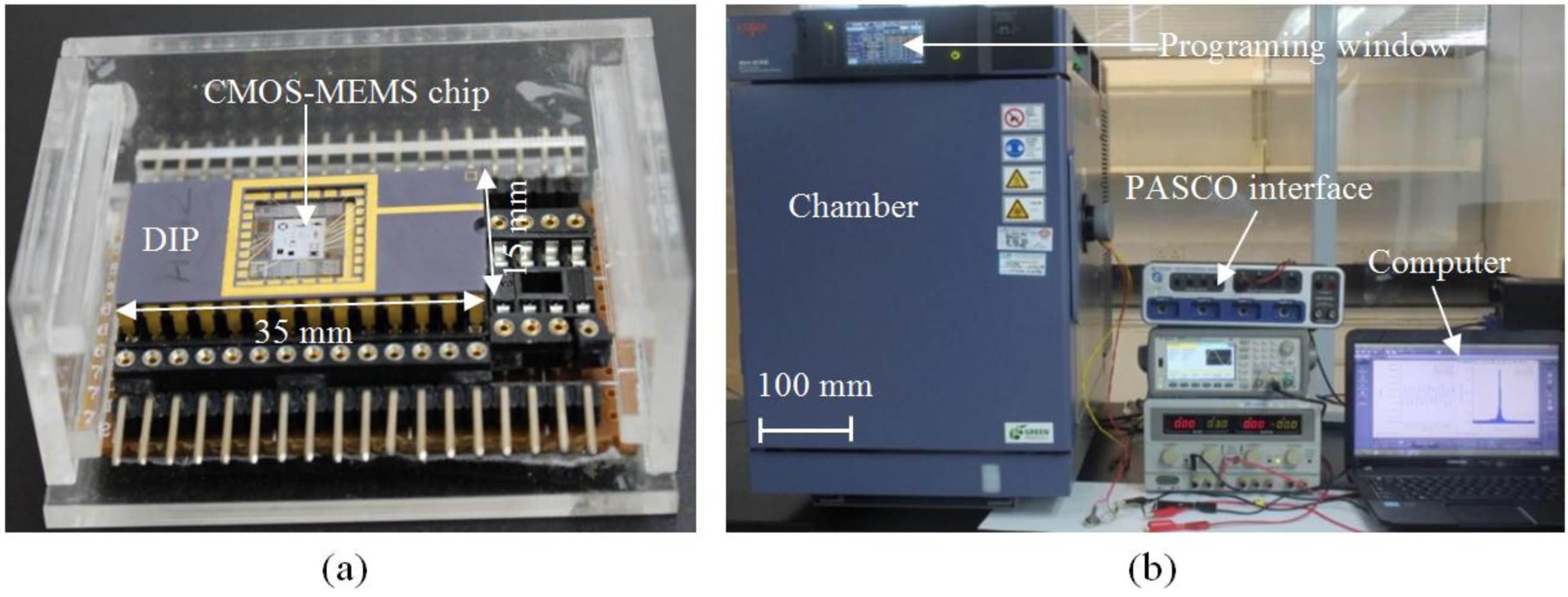
2.2. Characterization Setup for the CMOS-MEMS Humidity Sensor
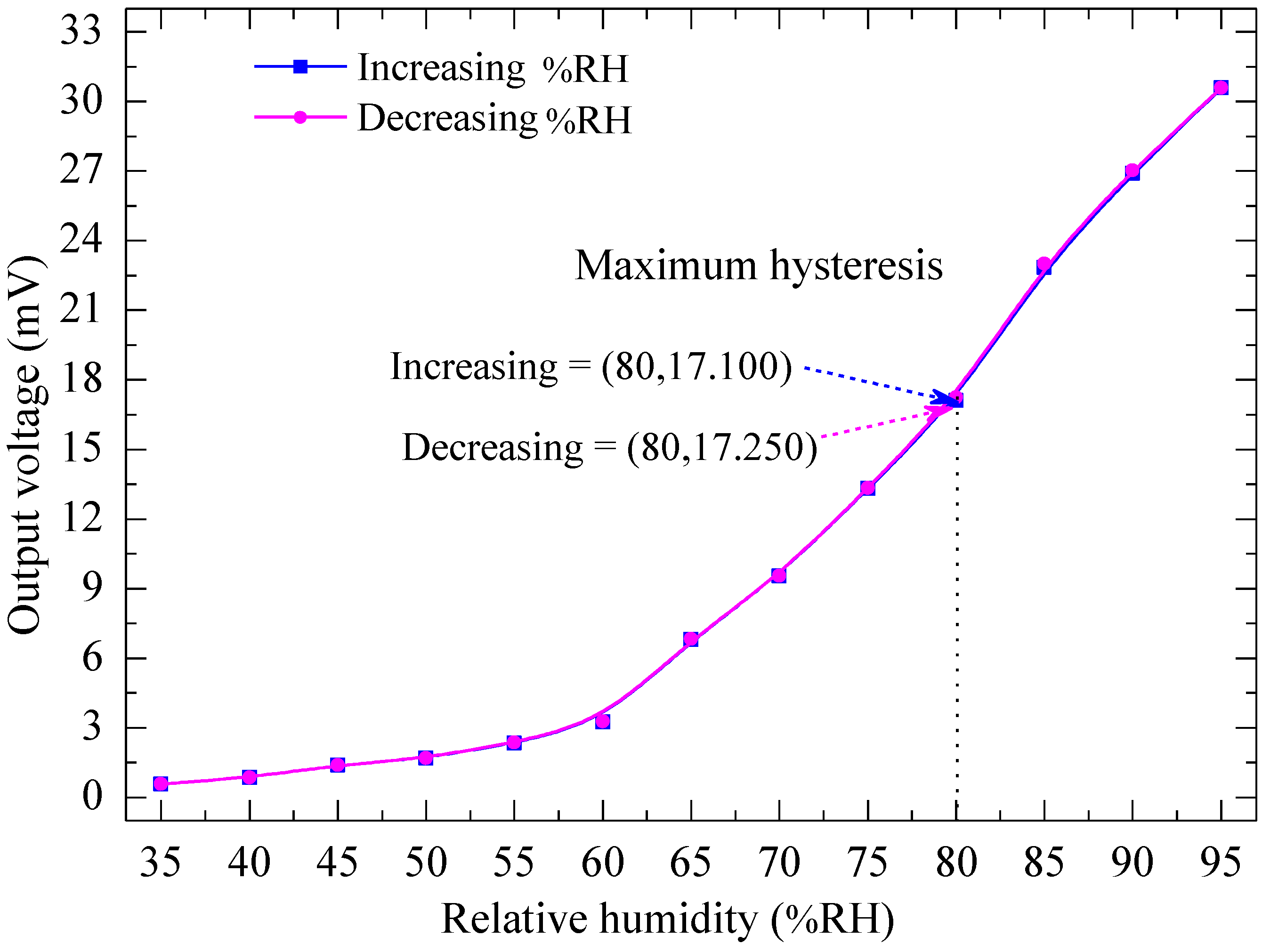
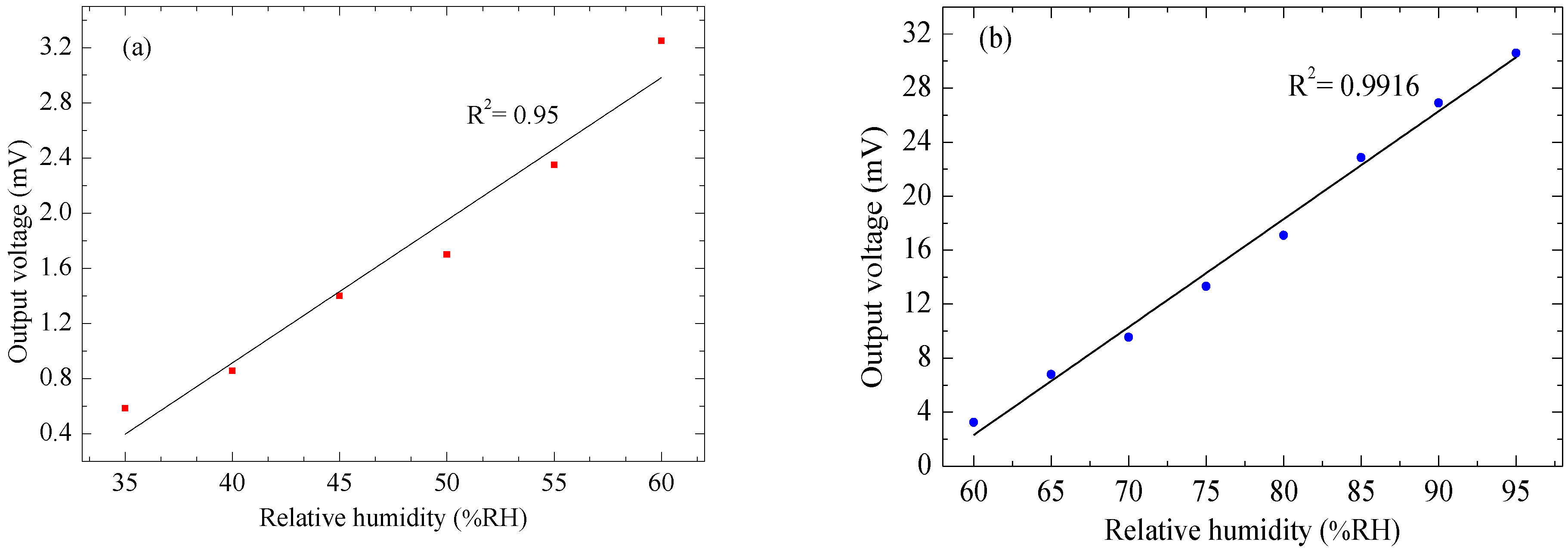
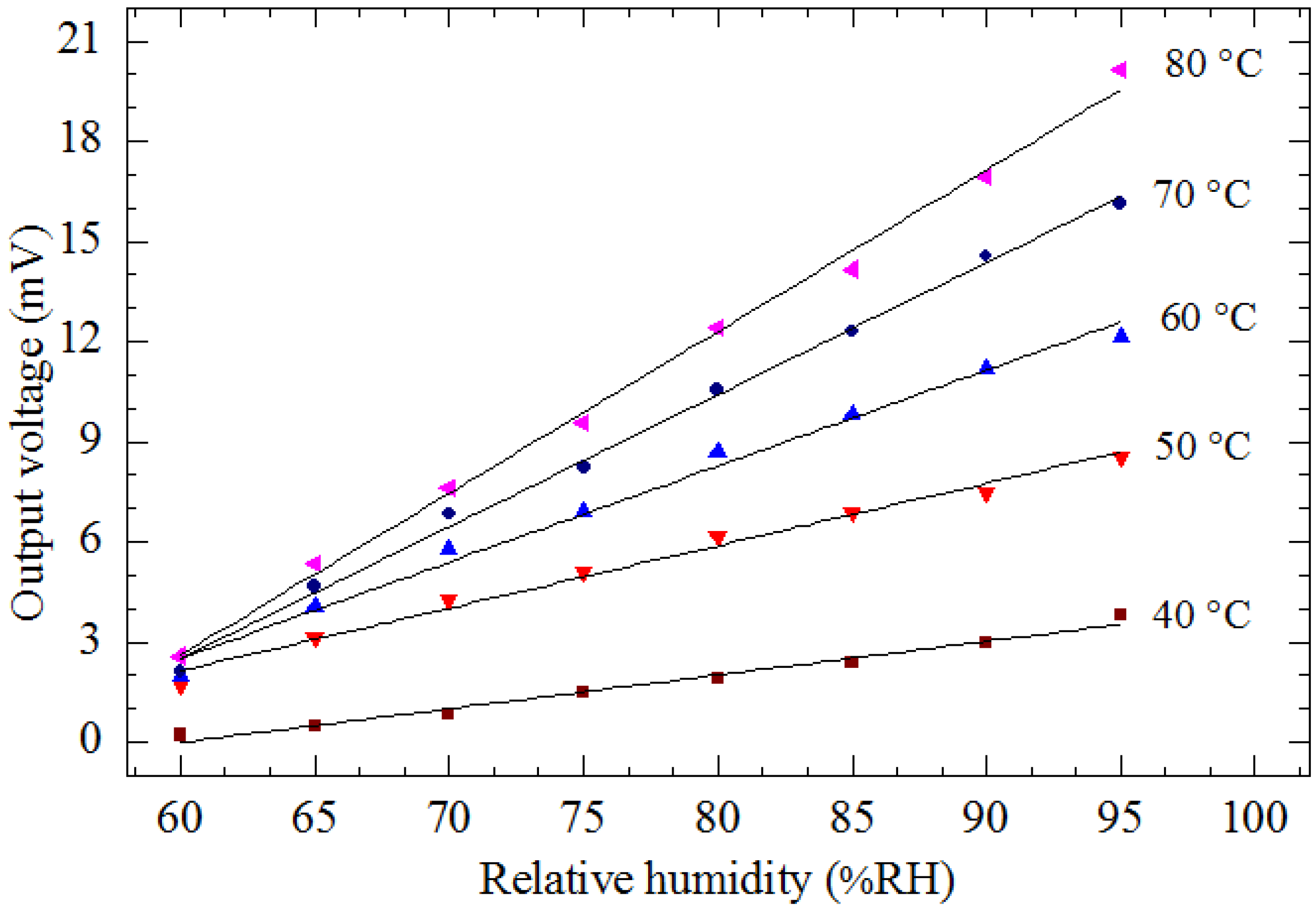
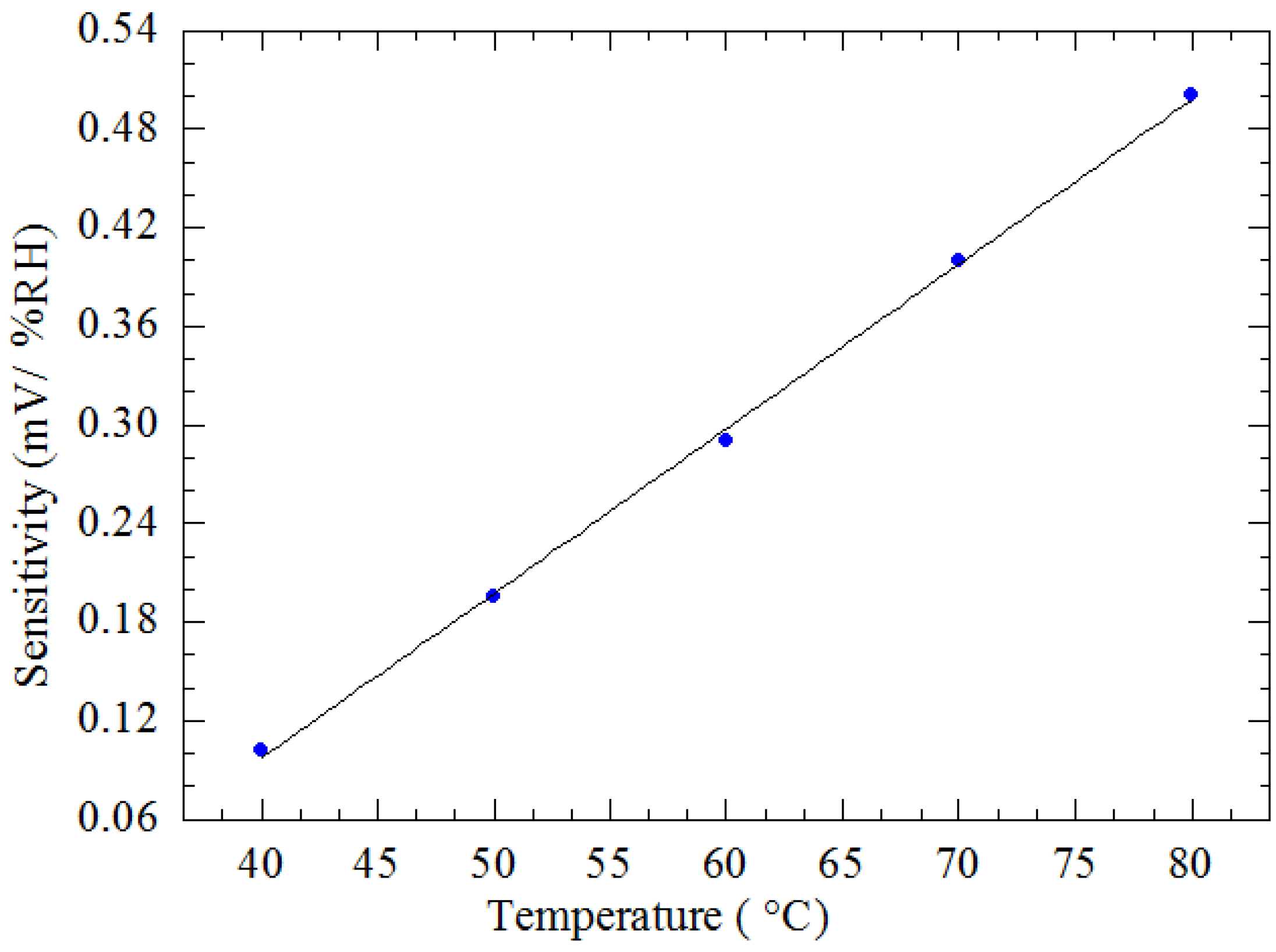
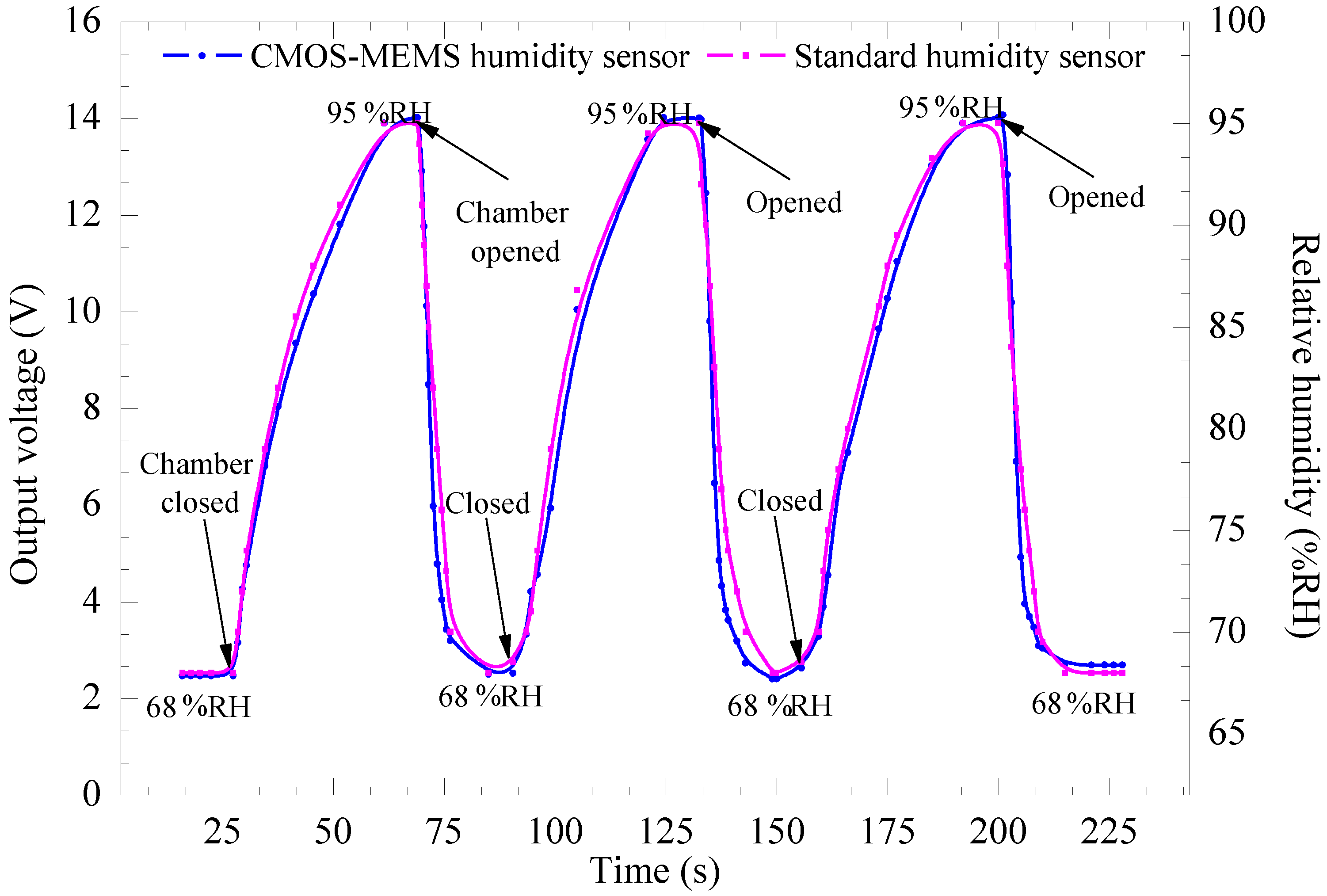
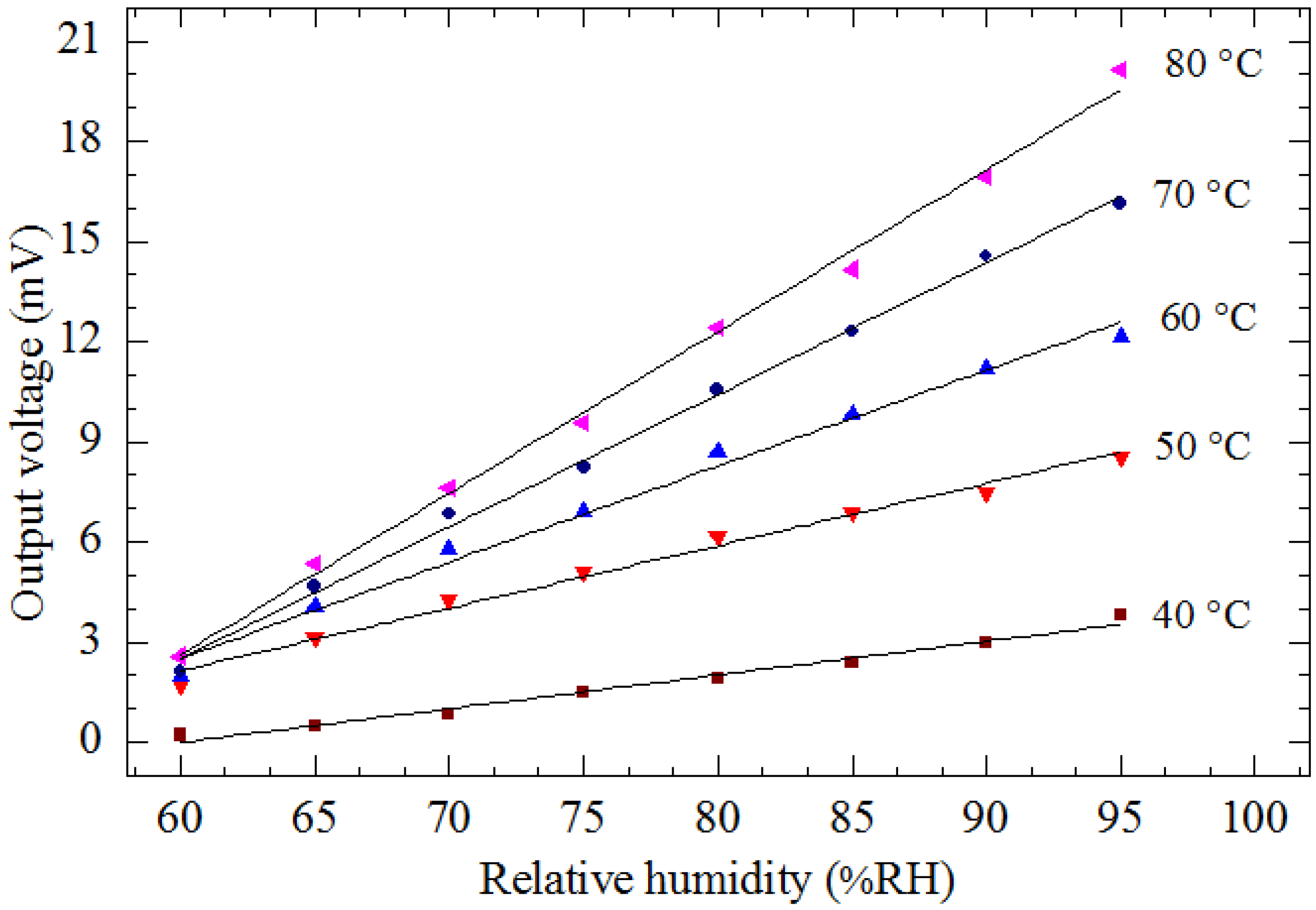
3. Results and Discussion





4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Atta, N.F. Nanosensors: Materials and Technologies; International Frequency Sensor Association Publishing: Barcelona, Spain, 2013. [Google Scholar]
- Fenner, R.; Zdankiewicz, E. Micromachined Water Vapor Sensors: A Review of Sensing Technologies. IEEE Sens. J. 2001, 1, 309–317. [Google Scholar] [CrossRef]
- Sreelekshmi, M.; Gupta, S.; Chidambaram, K. Room Temperature Synthesized Nano Metal Oxide Humidity Sensor. Inter. J. Appl. Eng. Res. 2013, 8, 2361–2363. [Google Scholar]
- Lee, D.H.; Hong, H.K.; Park, C.K.; Kim, G.H.; Jeon, Y.S.; Bu, J.U. A Micromachined Robust Humidity Sensor for Harsh Environment Applications. In Proceedings of the 14th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Interlaken, Switzerland, 25 January 2001; pp. 558–561.
- Yang, M.Z.; Dai, C.L.; Lin, W.Y. Fabrication and Characterization of Polyaniline/PVA Humidity Microsensors. Sensors 2011, 11, 8143–8151. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.W.; Gong, M.S. Resistive Humidity Sensor Using Phosphonium Salt-Containing Polyelectrolytes Based on the Mutually Cross-Linkable Copolymers. Macromol. Res. 2003, 11, 322–327. [Google Scholar] [CrossRef]
- Kiasari, N.M.; Soltanian, S.; Gholamkhass, B.; Servati, P. Room Temperature Ultra-Sensitive Resistive Humidity Sensor Based on Single Zinc Oxide Nanowire. Sens. Actuators A Phys. 2012, 182, 101–105. [Google Scholar] [CrossRef]
- Lee, M.J.; Lee, C.J.; Singh, V.; Yoo, K.P.; Min, N.K. Humidity Sensing Characteristics of Plasma Functionalized Multiwall Carbon Nanotube-polyimide Composite Films. In Proceedings of the IEEE Sensors, Lecce, Italy, 26–29 October 2008; pp. 430–433.
- Kim, J.H.; Hong, S.M.; Lee, J.S.; Moon, B.M.; Kim, K. High Sensitivity Capacitive Humidity Sensor with a Novel Polyimide Design Fabricated by MEMS Technology. In Proceedings of the 4th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Shenzhen, China, 5–8 January 2009; pp. 703–706.
- Gu, L.; Huang, Q.A.; Qin, M. A Novel Capacitive-Type Humidity Sensor Using CMOS Fabrication Technology. Sens. Actuators B Chem. 2004, 99, 491–498. [Google Scholar] [CrossRef]
- Dai, C.L. A Capacitive Humidity Sensor Integrated with Micro Heater and Ring Oscillator Circuit Fabricated by CMOS-MEMS Technique. Sens. Actuators B Chem. 2007, 122, 375–380. [Google Scholar] [CrossRef]
- Kim, J.H.; Hong, S.M.; Moon, B.M.; Kim, K. High-Performance Capacitive Humidity Sensor with Novel Electrode and Polyimide Layer Based on MEMS Technology. Microsys. Technol. 2010, 16, 2017–2021. [Google Scholar] [CrossRef]
- Kim, J.H.; Moon, B.M.; Hong, S.M. Capacitive Humidity Sensors Based on a Newly Designed Interdigitated Electrode Structure. Microsys. Technol. 2012, 18, 31–35. [Google Scholar] [CrossRef]
- Hu, Y.C.; Dai, C.L.; Hsu, C.C. Titanium Dioxide Nanoparticle Humidity Microsensors Integrated with Circuitry on-a-Chip. Sensors 2014, 14, 4177–4188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shukla, S.K.; Bharadvaja, A.; Parashar, G.K.; Mishra, A.P.; Dubey, G.C.; Tiwari, A. Fabrication of ultra-sensitive optical fiber based humidity sensor using TiO2 thin film. Adv. Mater. Lett. 2012, 3, 365–370. [Google Scholar]
- Dokmeci, M.; Najafi, K. A high-sensitivity polyimide capacitive relative humidity sensor for monitoring anodically bonded hermetic micropackages. J. Microelectromech. Syst. 2001, 10, 197–204. [Google Scholar] [CrossRef]
- Lazarus, N.; Bedair, S.S.; Lo, C.C.; Fedder, G.K. CMOS-MEMS Capacitive Humidity Sensor. J. Microelectromech. Syst. 2010, 19, 183–191. [Google Scholar] [CrossRef]
- Bedair, S.S.; Fedder, G.K. Polymer Mass Loading of CMOS/MEMS Microslot Cantilever for Gravimetric Sensing. In Proceedings of the IEEE Sensors, Atlanta, GA, USA, 28–31 October 2007; pp. 1164–1167.
- Bedair, S.S.; Fedder, G.K. Polymer Wicking to Mass Load Cantilevers for Chemical Gravimetric Sensors. In Proceedings of the 13th International Conference on Solid-State Sensors, Actuators and Microsystems, Seoul, Korea, 5–9 June 2005; pp. 2035–2039.
- Deng, F.; He, Y.; Zhang, C.; Feng, W. A CMOS Humidity Sensor for Passive RFID Sensing Applications. Sensors 2014, 14, 8728–8739. [Google Scholar] [CrossRef] [PubMed]
- Nizhnik, O.; Higuchi, K.; Maenaka, K. A Standard CMOS Humidity Sensor without Post-Processing. Sensors 2011, 11, 6197–6202. [Google Scholar] [CrossRef] [PubMed]
- Zalalutdinov, M.K.; Cross, J.D.; Baldwin, J.W.; Ilic, B.R.; Zhou, W.; Houston, B.H.; Parpia, Jeevak, M. CMOS-Integrated RF MEMS Resonators. J. Microelectromech. Sys. 2010, 19, 807–815. [Google Scholar] [CrossRef]
- Yusof, N.B.; Soin, N.; Dawal, S.Z.M. Capacitive Interfacing for MEMS Humidity and Accelerometer Sensors. In Proceedings of the International Conference for Technical Postgraduates (TECHPOS), Kuala Lumpur, Malaysia, 14–15 December 2009; pp. 1–5.
- Khir, M.H.M.; Qu, P.; Qu, H.W. A Low-Cost CMOS-MEMS Piezoresistive Accelerometer with Large Proof Mass. Sensors 2011, 11, 7892–7907. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.Y.; Huang, J.J.; Liu, C.Y.; Wang, H.Y. A CMOS-MEMS Humidity Sensor. In Proceedings of the International Conference on Circuits, System and Simulation (ICCSS), Bangkk, Thailand, 28–29 May 2011; pp. 212–217.
- Saha, T. Design, Fabrication, and CMOS Integration of MEMS Humidity Sensors. Master’s Thesis, Engineering, Department of Electrical and Computer Engineering, McGill University, Montreal, QC, Canada, 2012. [Google Scholar]
- Hierlemann, A.; Brand, O.; Hagleitner, C.; Baltes, H. Microfabrication Techniques for Chemical/Biosensors. IEEE Proc. 2003, 91, 839–863. [Google Scholar] [CrossRef]
- Lei, S.; Chen, Y.; Li, Y. A Novel SAW Humidity Sensor Based on Electrosprayed Polymerized Electrolyte Film. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Shanghai, China, 6–7 January 2011; pp. 214–217.
- Pascal-Delannoy, F.; Sorli, B.; Boyer, A. Quartz Crystal Microbalance (QCM) Used as Humidity Sensor. Sens. Actuators A Phys. 2000, 84, 285–291. [Google Scholar] [CrossRef]
- Fragakis, J.; Chatzandroulis, S.; Papadimitriou, D.; Tsamis, C. Simulation of Capacitive Type Bimorph Humidity Sensors. J. Phys. Conf. Ser. 2005, 10, 305. [Google Scholar] [CrossRef]
- Nuryadi, R.; Djajadi, A.; Adiel, R.; Aprilia, L.; Aisah, N. Resonance Frequency Change in Microcantilever-Based Sensor due to Humidity Variation. Mater. Sci. Forum 2013, 737, 176–182. [Google Scholar] [CrossRef]
- Sappat, A.; Wisitsoraat, A.; Sriprachuabwong, C.; Jaruwongrungsee, K.; Lomas, T.; Tuantranont, A. Humidity Sensor Based on Piezoresistive Microcantilever with Inkjet Printed PEDOT/PSS Sensing Layers. In Proceedings of the 8th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Khon Kaen, Thailand, 17–19 May 2011; pp. 34–37.
- Kima, B.H.; Prinsa, F.E.; Kerna, D.P.; Raibleb, S.; Weimarb, U. Multicomponent Analysis and Prediction with a Cantilever Array Based Gas Sensor. Sens. Actuators B Chem. 2001, 78, 12–18. [Google Scholar] [CrossRef]
- Ahmed, A.Y.; Dennis, J.O.; Khir, M.H.M.; Saad, M.N.M. Design and Characterization of Embedded Microheater on CMOS-MEMS Resonator for Application in Mass-Sensitive Gas Sensors. In Proceedings of the 2014 5th International Conference on Intelligent and Advanced Systems: Technological Convergence for Sustainable Future (ICIAS), Kuala Lumpur, Malaysia, 3–5 June 2014; pp. 1–4.
- Dennis, J.O.; Ahmed, A.Y.; Khir, M.H.M.; Rabih, A.A.S. Modelling and Simulation of the Effect of Air Damping on the Frequency and Quality factor of a CMOS-MEMS Resonator. Appl. Math. Infor. Sci. (AMIS) 2015, 9, 729–737. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dennis, J.-O.; Ahmed, A.-Y.; Khir, M.-H. Fabrication and Characterization of a CMOS-MEMS Humidity Sensor. Sensors 2015, 15, 16674-16687. https://0-doi-org.brum.beds.ac.uk/10.3390/s150716674
Dennis J-O, Ahmed A-Y, Khir M-H. Fabrication and Characterization of a CMOS-MEMS Humidity Sensor. Sensors. 2015; 15(7):16674-16687. https://0-doi-org.brum.beds.ac.uk/10.3390/s150716674
Chicago/Turabian StyleDennis, John-Ojur, Abdelaziz-Yousif Ahmed, and Mohd-Haris Khir. 2015. "Fabrication and Characterization of a CMOS-MEMS Humidity Sensor" Sensors 15, no. 7: 16674-16687. https://0-doi-org.brum.beds.ac.uk/10.3390/s150716674