
Heading Estimation for Indoor Pedestrian Navigation Using a Smartphone in the Pocket

Abstract
:1. Introduction
2. Related Works
3. Overview

4. Methodology
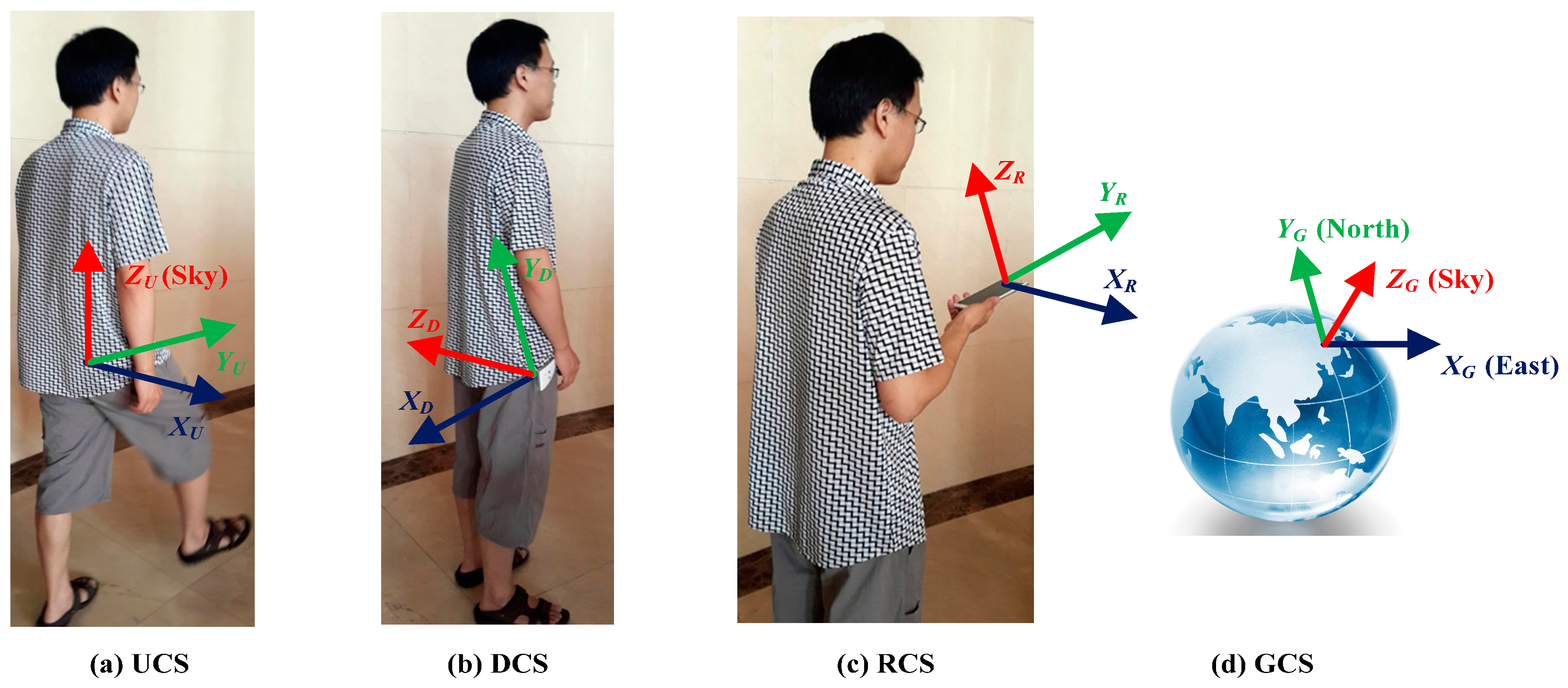
4.1. Projection of Acceleration Signals into the RCS by Rotation Matrix
4.2. PCA for Local Walking Direction Extraction



4.3. Calibration Process for Determining Global Walking Direction
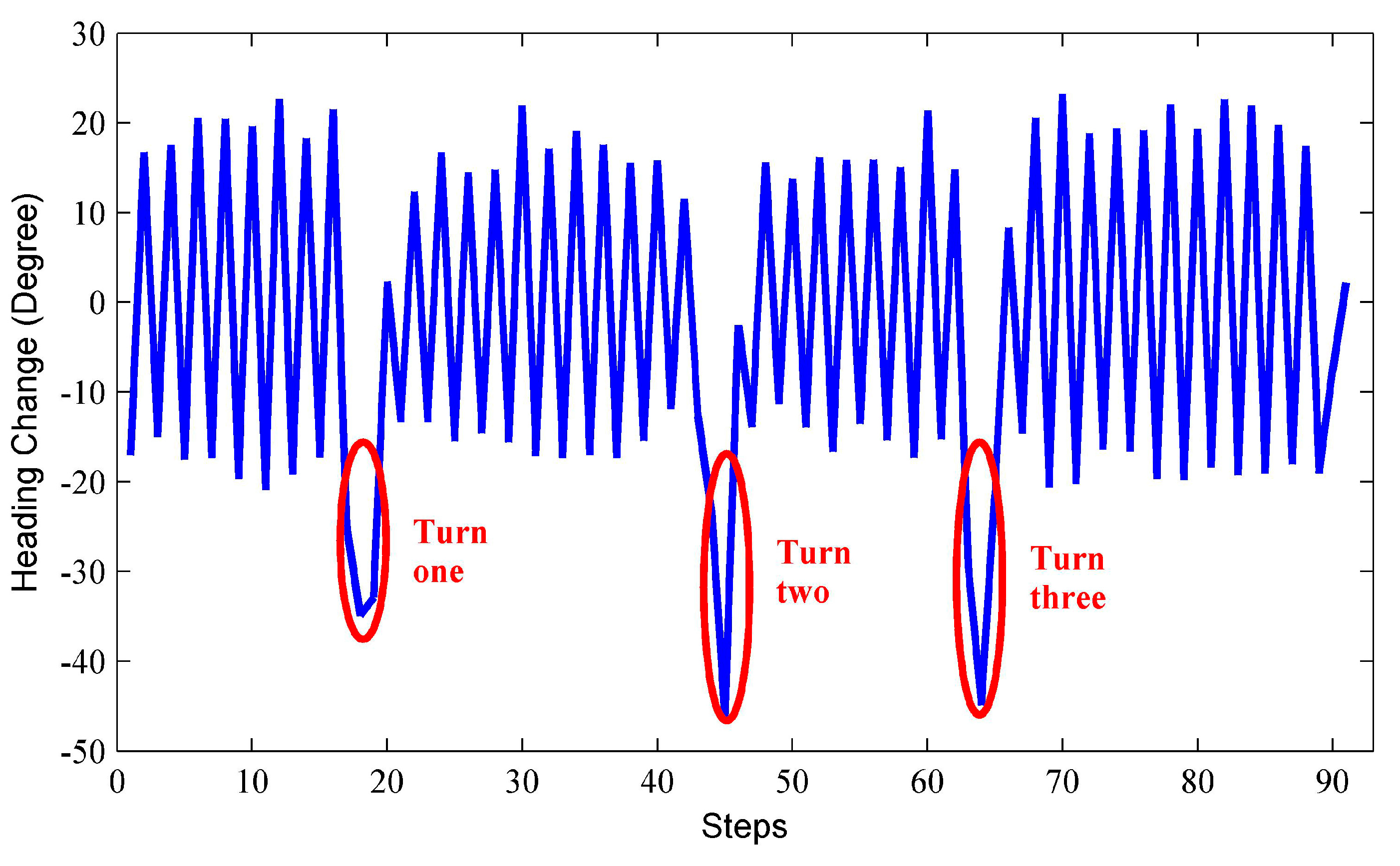
4.4. Turn Detection Algorithm for Improving RMPCA

5. Evaluation
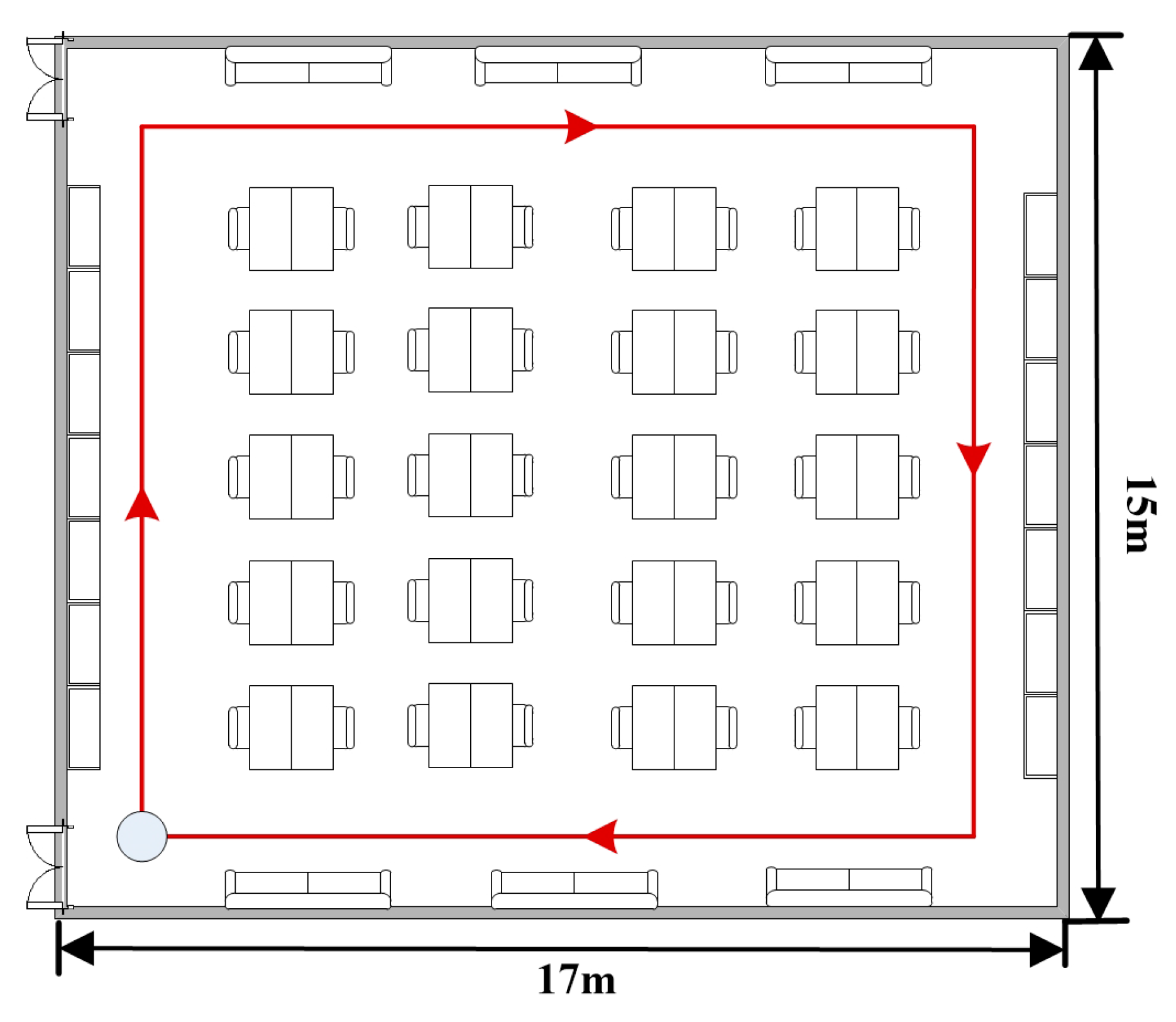
5.1. Experimental Setup

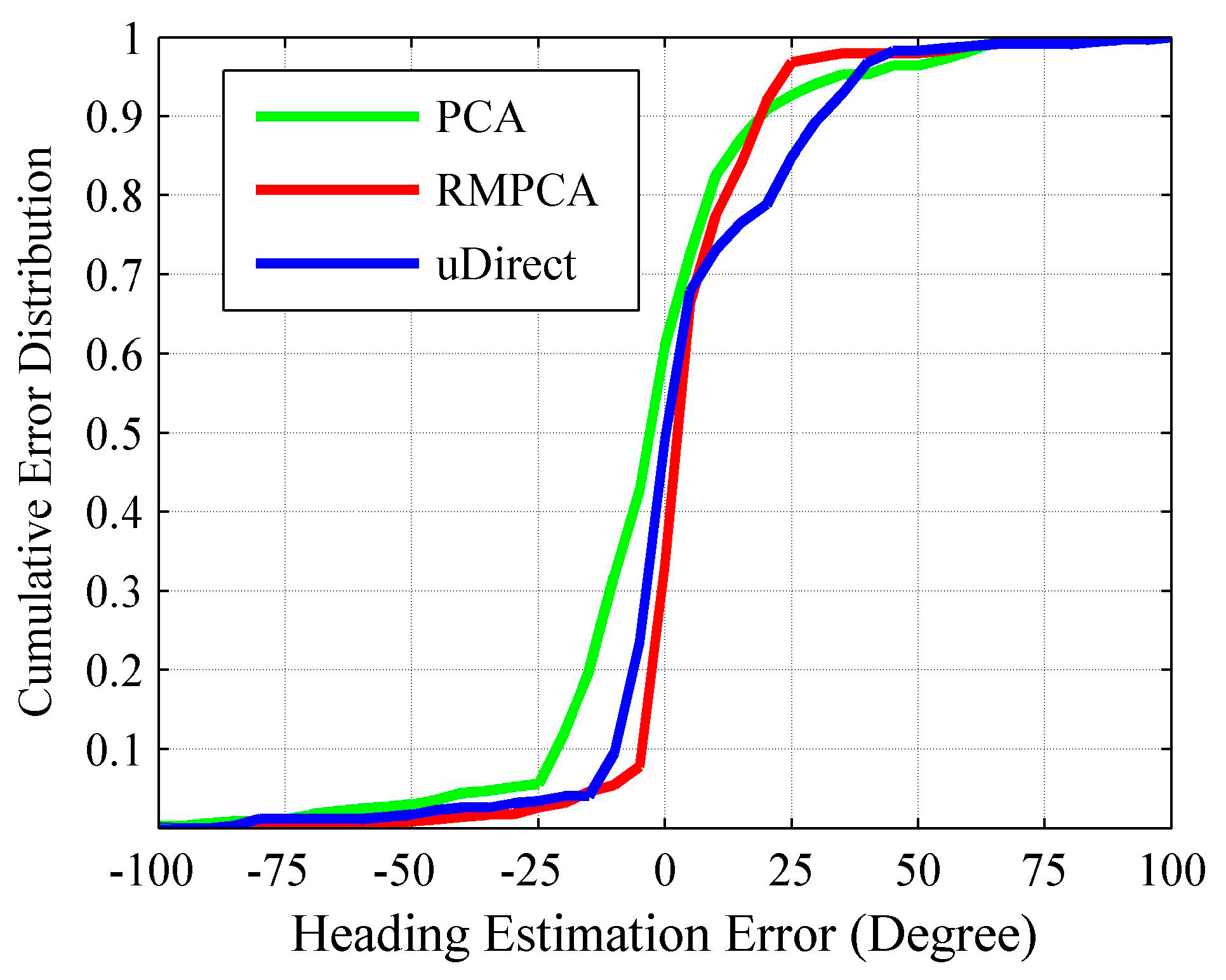
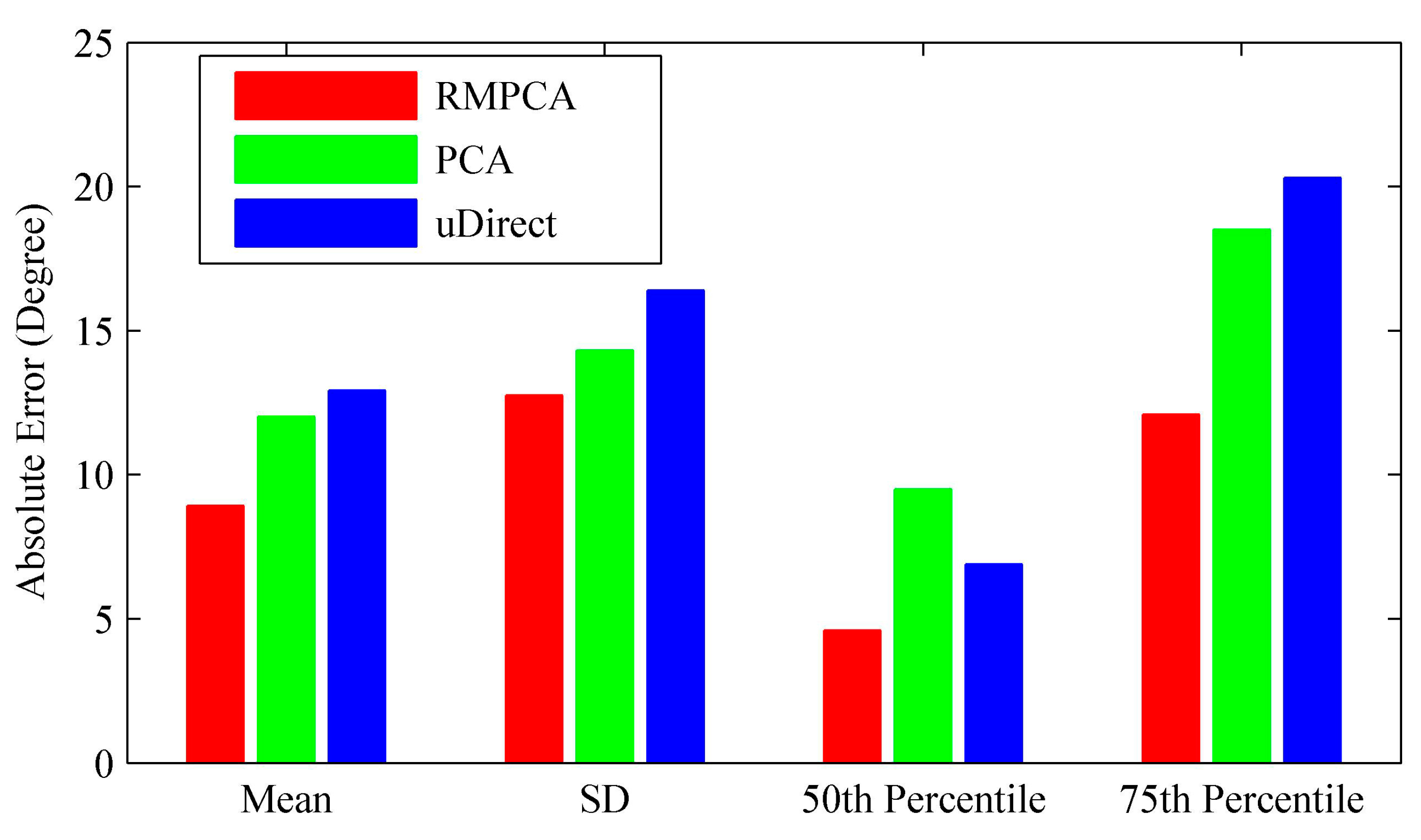
5.2. Heading Estimation Performance Analysis



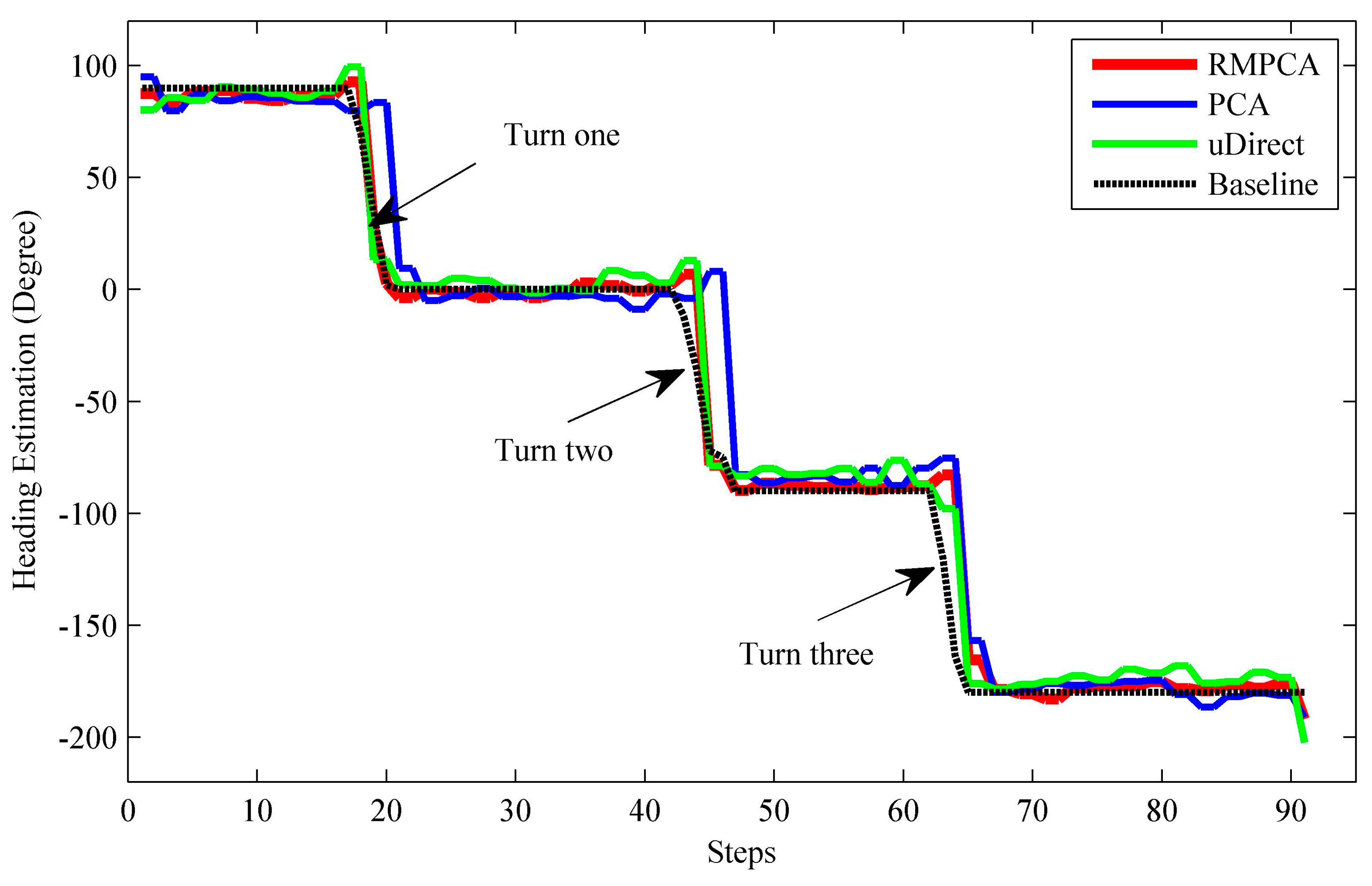
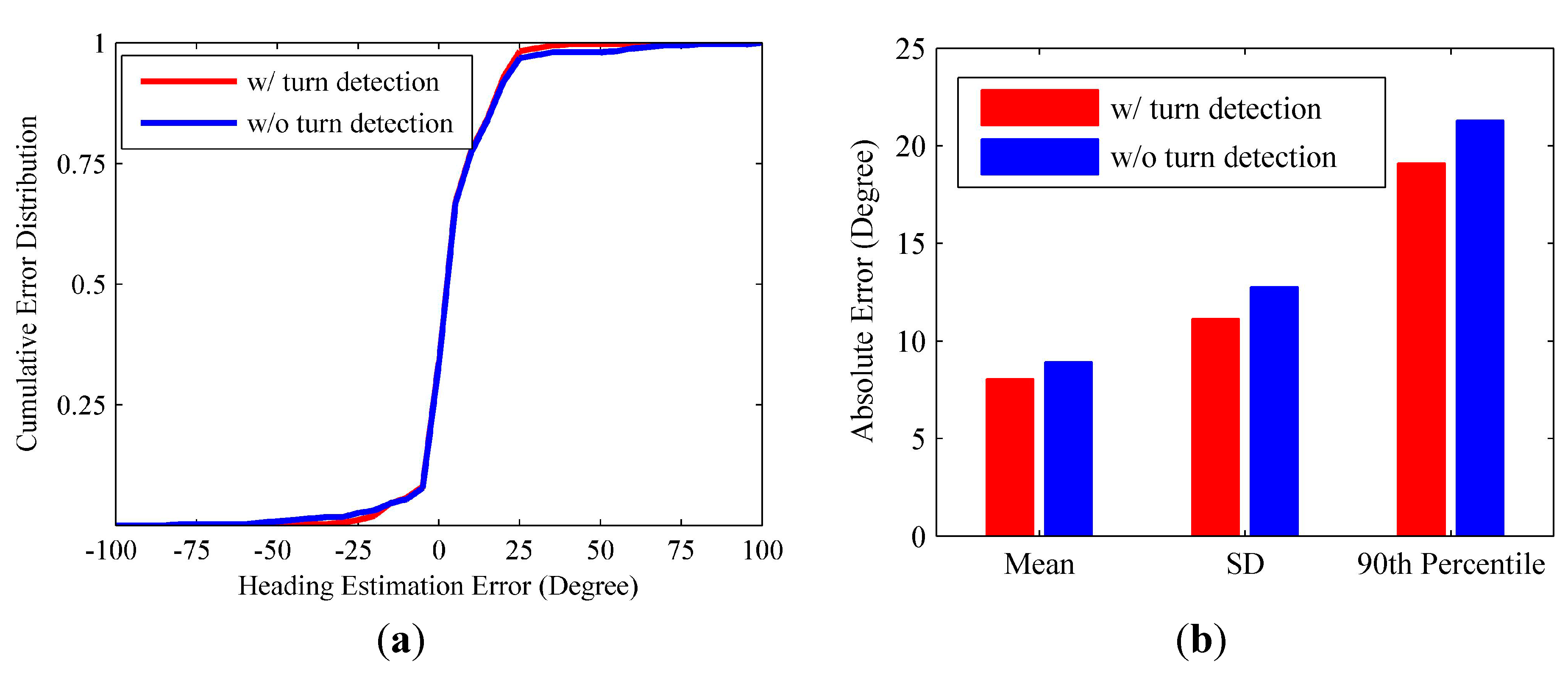
5.3. Turn detection for Heading Estimation Improvement

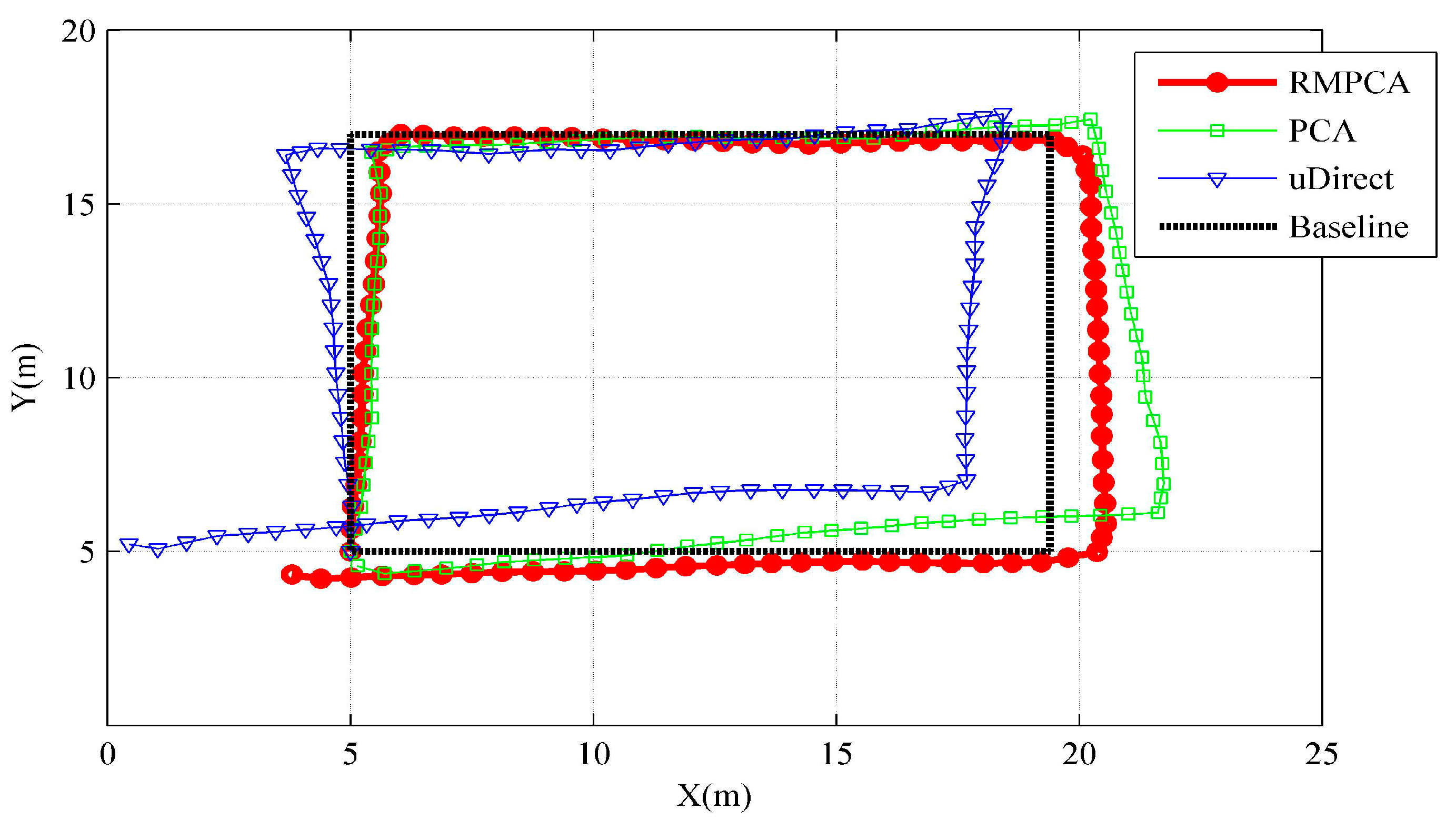
5.4. PDR Application


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heading Estimation Approaches | Real-Time Localization Errors | |||
|---|---|---|---|---|
| Mean | Standard Deviation | 50th Percentile | 95th Percentile | |
| RMPCA | 1.39 | 1.16 | 1.43 | 3.58 |
| PCA | 2.05 | 1.62 | 2.14 | 5.04 |
| uDirect | 2.23 | 1.84 | 2.30 | 5.67 |
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Deng, Z.-A.; Xu, Y.B.; Ma, L. Indoor positioning via nonlinear discriminative feature extraction in wireless local area network. Comput. Commun. 2012, 35, 738–747. [Google Scholar] [CrossRef]
- Chehri, A.; Fortier, P.; Tardif, P.M. UWB-based sensor networks for localization in mining environments. Ad Hoc Netw. 2009, 7, 987–1000. [Google Scholar] [CrossRef]
- Kong, J. Fault-tolerant RFID reader localization based on passive RFID tags. IEEE Trans. Parall. Distr. 2014, 25, 2065–2076. [Google Scholar]
- Renaudin, V.; Combettes, C. Magnetic, acceleration fields and gyroscope quaternion (MAGYQ)-based attitude estimation with smartphone sensors for indoor pedestrian navigation. Sensors 2014, 14, 22864–22890. [Google Scholar] [CrossRef] [PubMed]
- Qian, J.; Pei, L.; Ma, J.; Ying, R.; Liu, P. Vector graph assisted pedestrian dead reckoning using an unconstrained smartphone. Sensors 2015, 15, 5032–5057. [Google Scholar] [CrossRef] [PubMed]
- Hoseinitabatabaei, S.A.; Gluhak, A.; Tafazoll, R. A survey on smartphone-based systems for opportunistic user context recognition. ACM Comput. Surv. 2013, 45, 1–55. [Google Scholar] [CrossRef]
- Deng, Z.-A.; Hu, Y.; Yu, J.; Na, Z. Extended kalman filter for real time indoor localization by fusing WiFi and smartphone inertial sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef]
- Callmer, J.; Tornqvist, D.; Gustafsson, F. Robust heading estimation indoors using convex optimization. In Proceedings of the 16th International Conference on Information Fusion (FUSION), Istanbul, Turkey, 9–12 July 2013; pp. 1173–1179.
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Diaz, E.M.; Gonzalez, A.L.M.; de Ponte Müller, F. Standalone inertial pocket navigation system. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS) 2014, Monterey, CA, USA, 5–8 May 2014; pp. 241–251.
- Ichikawa, F.; Chipchase, J.; Grignani, R. Where’s the phone? A study of mobile phone location in public spaces. In Proceedings of the 2005 Mobility Conference on Mobile Technology Applications & Systems Retrieve, Guangzhou, China, 15–17 November 2005; pp. 1–8.
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Assessment of indoor magnetic field anomalies using multiple magnetometers. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 1–9.
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Gr. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Jung, W.; Woo, W.; Lee, S. Orientation tracking exploiting ubiTrack. In Proceedings of the UbiComp 2005, Tokyo, Japan, 11–14 September 2005; pp. 47–50.
- Jirawimut, R.; Prakoonwit, S.; Cecelja, F.; Balachandran, W. Visual odometer for pedestrian navigation. IEEE Trans. Instrum. Meas. 2003, 52, 1166–1173. [Google Scholar] [CrossRef]
- Pei, L.; Chen, R.; Chen, Y.; Leppakoski, H.; Perttula, A. Indoor/outdoor seamless positioning technologies integrated on smart phone. In Proceedings of the IEEE International Conference on Advances in Satellite and Space Communications, Colmar, France, 20–25 July 2009; pp. 141–145.
- Roy, N.; Wang, H.; Choudhury, R.R. I am a smartphone and I can tell my user’s walking direction. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June, 2014; pp. 354–354.
- Evennou, F.; Marx, F. Advanced integration of WiFi and inertial navigation systems for indoor mobile positioning. Eurasip J. Appl. Signal Proc. 2006, 2006, 1–11. [Google Scholar] [CrossRef]
- Kunze, K.; Lukowicz, P.; Junker, H.; Troster, G. Where am I: Recognizing on-body positions of wearable sensors. Locat. Context Aware. 2005, 3479, 264–275. [Google Scholar]
- Kunze, K.; Lukowicz, P.; Partridge, K.; Begole, B. Which way am I facing: Inferring horizontal device orientation from an accelerometer signal. In Proceedings of the International Symposium on Wearable Computers, Linz, Austria, 4–7 September 2009; pp. 149–150.
- Steinhoff, U.; Schiele, B. Dead reckoning from the pocket—An experimental study. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010; pp. 162–170.
- Hoseinitabatabaei, S.A.; Gluhak, A.; Tafazolli, R.; Headley, W. Design, realization, and evaluation of uDirect—An approach for pervasive observation of user facing direction on mobile phones. IEEE Trans. Mob. Comput. 2014, 13, 1981–1994. [Google Scholar] [CrossRef]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Use of earth’s magnetic field for mitigating gyroscope errors regardless of magnetic perturbation. Sensors 2011, 11, 11390–11414. [Google Scholar] [CrossRef] [PubMed]
- De Vries, W.; Veeger, H.; Baten, C.; van der Helm, F. Magnetic distortion in motion labs, implications for validating inertial magnetic sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Chon, Y.; Cha, H. Smartphone-based collaborative and autonomous radio fingerprinting. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2012, 42, 112–122. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 14th ACM International Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 1–10.
- Ma, L.; Xu, Y.B. Received signal strength recovery in green WLAN indoor positioning system using singular value thresholding. Sensors 2015, 15, 1292–1311. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services (MobiSys’12), Low Wood Bay, Lake District, UK, 25–29 June 2012; pp. 197–210.
- Chou, J.C.K. Quaternion kinematic and dynamic differential equations. IEEE Trans. Robot. Autom. 1992, 8, 53–64. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Bar-Shalom, Y.; Li, X.-R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Kourogi, M.; Kurata, T. Personal positioning based on walking locomotion analysis with self-contained sensors and a wearable camera. In Proceedings of the Second IEEE/ACM International Symposium on Mixed and Augmented Reality, Tokyo, Japan, 8–10 October 2003; pp. 103–112.
- Brajdic, A.; Harle, R. Walk detection and step counting on unconstrained smartphones. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September, 2013; pp. 225–234.
- Jahn, J.; Batzer, U.; Seitz, J.; Patino-Studencka, L.; Boronat, J.G. Comparison and evaluation of acceleration based step length estimators for handheld devices. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.-A.; Wang, G.; Hu, Y.; Wu, D. Heading Estimation for Indoor Pedestrian Navigation Using a Smartphone in the Pocket. Sensors 2015, 15, 21518-21536. https://0-doi-org.brum.beds.ac.uk/10.3390/s150921518
Deng Z-A, Wang G, Hu Y, Wu D. Heading Estimation for Indoor Pedestrian Navigation Using a Smartphone in the Pocket. Sensors. 2015; 15(9):21518-21536. https://0-doi-org.brum.beds.ac.uk/10.3390/s150921518
Chicago/Turabian StyleDeng, Zhi-An, Guofeng Wang, Ying Hu, and Di Wu. 2015. "Heading Estimation for Indoor Pedestrian Navigation Using a Smartphone in the Pocket" Sensors 15, no. 9: 21518-21536. https://0-doi-org.brum.beds.ac.uk/10.3390/s150921518