
Assessment of Three Tropospheric Delay Models (IGGtrop, EGNOS and UNB3m) Based on Precise Point Positioning in the Chinese Region

Abstract
:1. Introduction
2. Methodology and Data
2.1. Assessment of Tropospheric Delay Models Based on GPS-Derived ZTDs

2.2. Assessment of Tropospheric Delay Models Based on PPP
3. Results
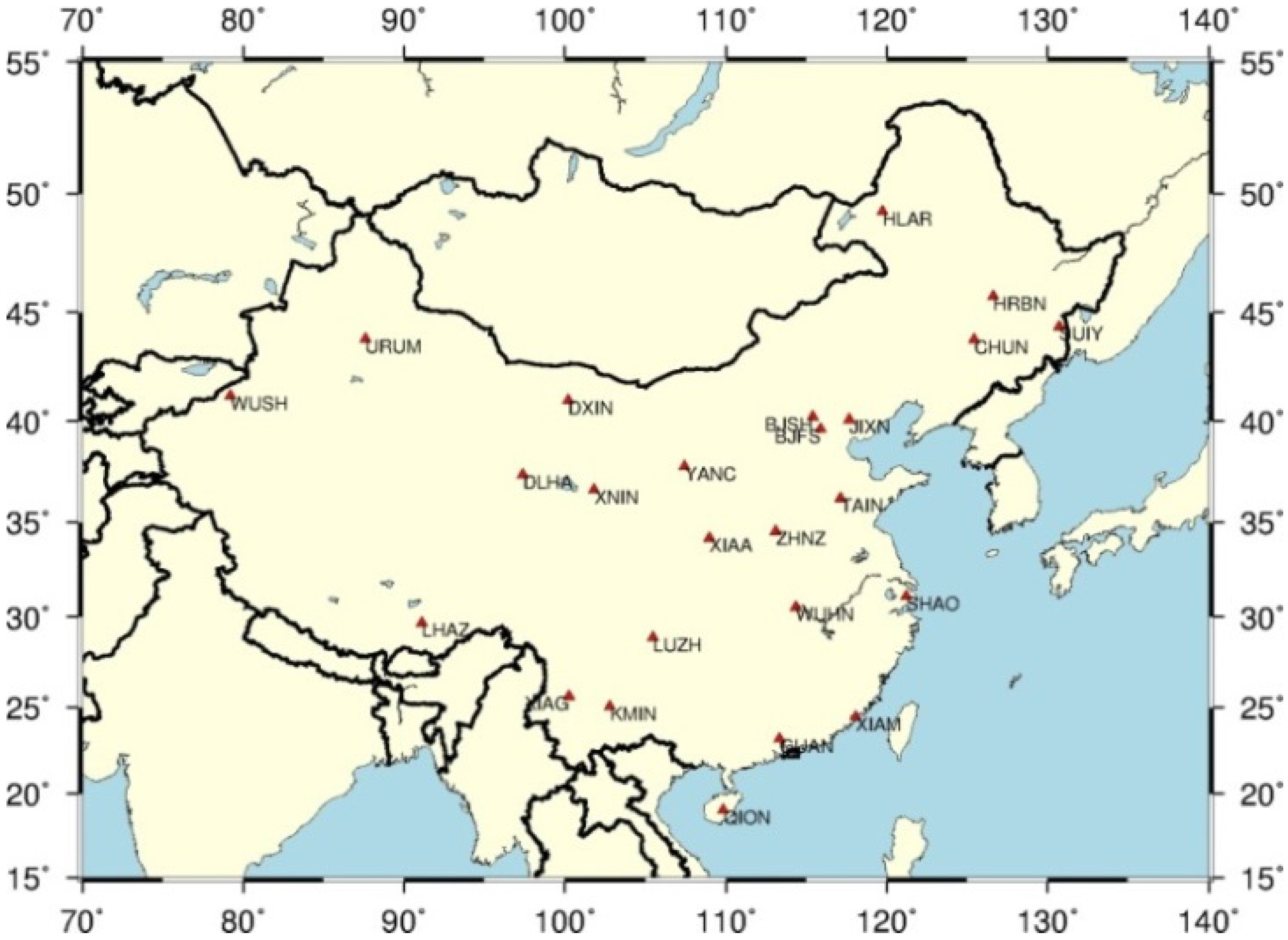
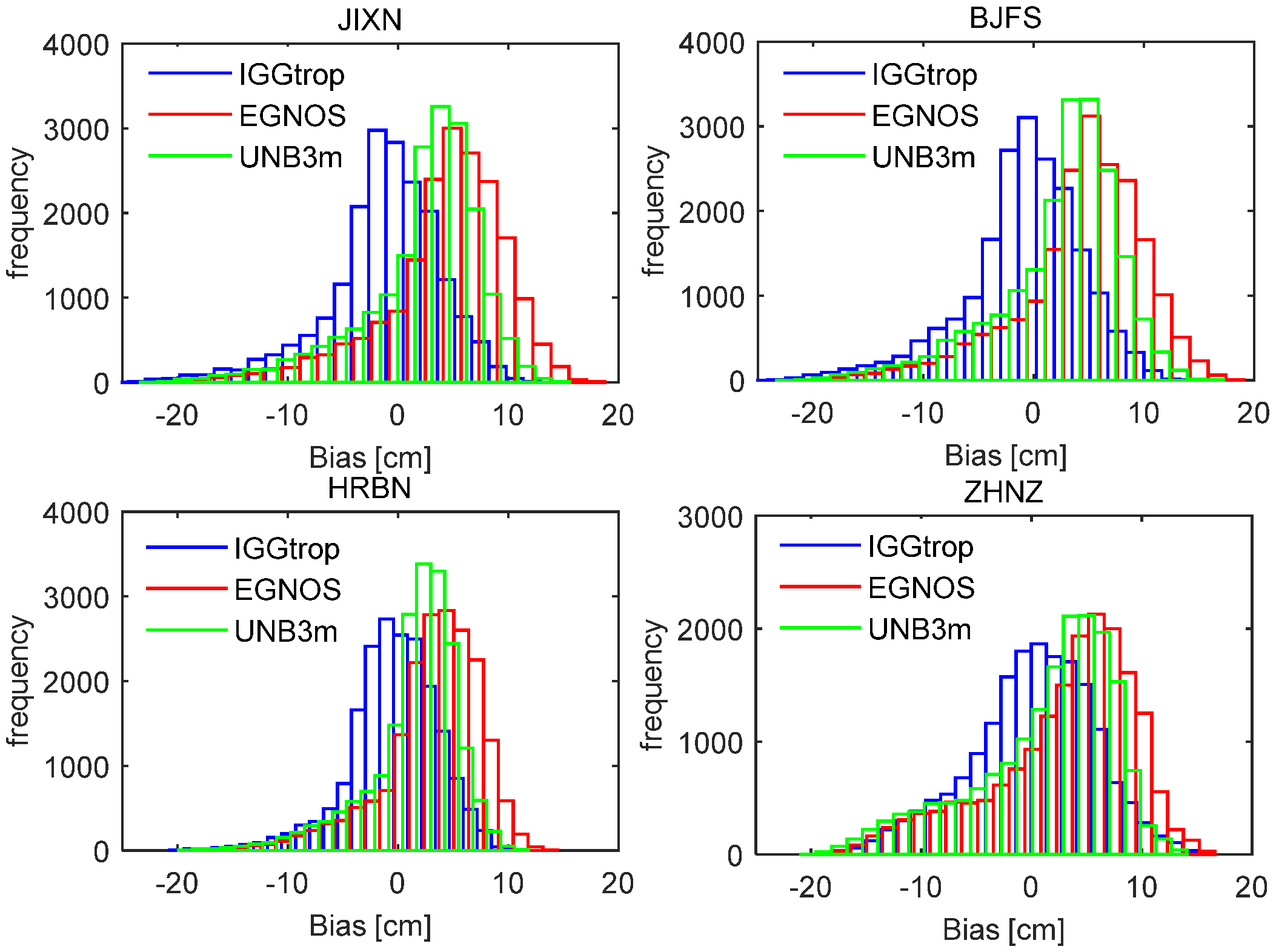
3.1. Accuracy Analysis for the IGGtrop, EGNOS and UNB3m Models Against GPS-Derived ZTDs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SITE | IGGtrop | EGNOS | UNB3m | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| H | Bias | STD | RMS | Rel | Bias | STD | RMS | Rel | Bias | STD | RMS | Rel | |
| (m) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | (cm) | ||||
| SHAO | 22 | 0.1 | 6.7 | 6.7 | 2.7% | 1.5 | 7.7 | 7.8 | 3.1% | −0.4 | 7.6 | 7.6 | 3.0% |
| WUHN | 26 | 0.0 | 6.2 | 6.3 | 2.5% | 1.9 | 7.3 | 7.6 | 3.0% | 0.3 | 7.3 | 7.3 | 2.9% |
| GUAN | 31 | −3.0 | 6.2 | 6.9 | 2.7% | −2.5 | 7.3 | 7.8 | 3.0% | −4.8 | 7.7 | 8.0 | 3.1% |
| JIXN | 39 | −1.3 | 5.1 | 5.3 | 2.2% | 4.3 | 5.5 | 7.1 | 2.9% | 2.3 | 5.3 | 5.8 | 2.4% |
| BJFS | 88 | −0.9 | 5.3 | 5.4 | 2.3% | 4.4 | 5.7 | 7.2 | 3.0% | 2.4 | 5.5 | 6.1 | 2.5% |
| XIAM | 106 | −1.3 | 5.9 | 5.9 | 2.3% | −1.4 | 6.7 | 6.8 | 2.7% | −3.5 | 6.9 | 7.7 | 3.1% |
| BJSH | 155 | −0.9 | 5.2 | 5.3 | 2.2% | 3.8 | 5.6 | 6.8 | 2.9% | 1.8 | 5.4 | 5.7 | 2.4% |
| HRBN | 198 | −0.4 | 4.0 | 4.0 | 1.7% | 3.1 | 4.4 | 5.5 | 2.4% | 1.5 | 4.1 | 4.4 | 1.9% |
| QION | 208 | −3.4 | 4.8 | 5.8 | 2.3% | −1.9 | 6.1 | 6.3 | 2.5% | −3.7 | 6.4 | 7.3 | 2.9% |
| CHUN | 268 | −2.3 | 4.3 | 5.0 | 2.1% | 2.1 | 4.8 | 5.3 | 2.3% | 0.4 | 4.5 | 4.6 | 2.0% |
| LUZH | 298 | 2.3 | 4.3 | 4.9 | 2.0% | −0.9 | 6.0 | 6.1 | 2.5% | −2.5 | 6.1 | 6.6 | 2.7% |
| TAIN | 339 | −0.5 | 5.5 | 5.5 | 2.4% | 3.1 | 6.2 | 7.0 | 3.0% | 1.2 | 6.1 | 6.3 | 2.7% |
| SUIY | 369 | −0.9 | 3.8 | 3.8 | 1.7% | 2.7 | 4.4 | 5.2 | 2.2% | 1.1 | 4.2 | 4.3 | 1.9% |
| ZHNZ | 444 | 0.0 | 5.5 | 5.5 | 2.4% | 2.9 | 6.3 | 7.1 | 3.1% | 1.2 | 6.3 | 6.4 | 2.8% |
| XIAA | 509 | −0.2 | 5.1 | 5.2 | 2.3% | 2.1 | 6.1 | 6.6 | 2.9% | 0.4 | 6.1 | 6.2 | 2.7% |
| HLAR | 629 | 0.0 | 3.3 | 3.3 | 1.5% | 2.2 | 3.7 | 4.3 | 2.0% | 1.0 | 3.3 | 3.5 | 1.6% |
| URUM | 859 | 0.8 | 2.9 | 3.0 | 1.4% | 2.4 | 2.8 | 3.8 | 1.8% | 1.2 | 2.7 | 3.0 | 1.4% |
| DXIN | 1018 | 1.0 | 2.9 | 3.1 | 1.5% | 4.3 | 3.1 | 5.3 | 2.5% | 3.1 | 2.9 | 4.2 | 2.0% |
| YANC | 1304 | 0.9 | 3.9 | 4.0 | 2.0% | 2.4 | 4.3 | 5.0 | 2.4% | 1.2 | 4.3 | 4.5 | 2.2% |
| WUSH | 1395 | 0.7 | 2.7 | 2.8 | 1.4% | 1.6 | 2.6 | 3.1 | 1.5% | 0.6 | 2.5 | 2.6 | 1.3% |
| XIAG | 1974 | 0.3 | 2.8 | 2.8 | 1.4% | −1.7 | 5.8 | 6.0 | 3.1% | −2.4 | 5.8 | 6.3 | 3.2% |
| KMIN | 1986 | −0.7 | 3.0 | 3.1 | 1.6% | −2.7 | 5.6 | 6.2 | 3.2% | −3.4 | 5.7 | 6.6 | 3.4% |
| XNIN | 2364 | −0.4 | 2.8 | 2.8 | 1.6% | −0.3 | 3.7 | 3.8 | 2.1% | −1.0 | 3.7 | 3.9 | 2.2% |
| DLHA | 2956 | 0.7 | 2.3 | 2.4 | 1.4% | 0.5 | 2.8 | 2.9 | 1.7% | −0.1 | 2.8 | 2.8 | 1.7% |
| LHAZ | 3632 | 0.9 | 2.1 | 2.3 | 1.5% | −2.0 | 3.8 | 4.1 | 2.6% | −2.3 | 3.8 | 4.2 | 2.7% |
| MEAN | -- | −0.3 | 4.3 | 4.4 | -- | 1.3 | 5.1 | 5.8 | -- | −0.2 | 5.1 | 5.4 | -- |




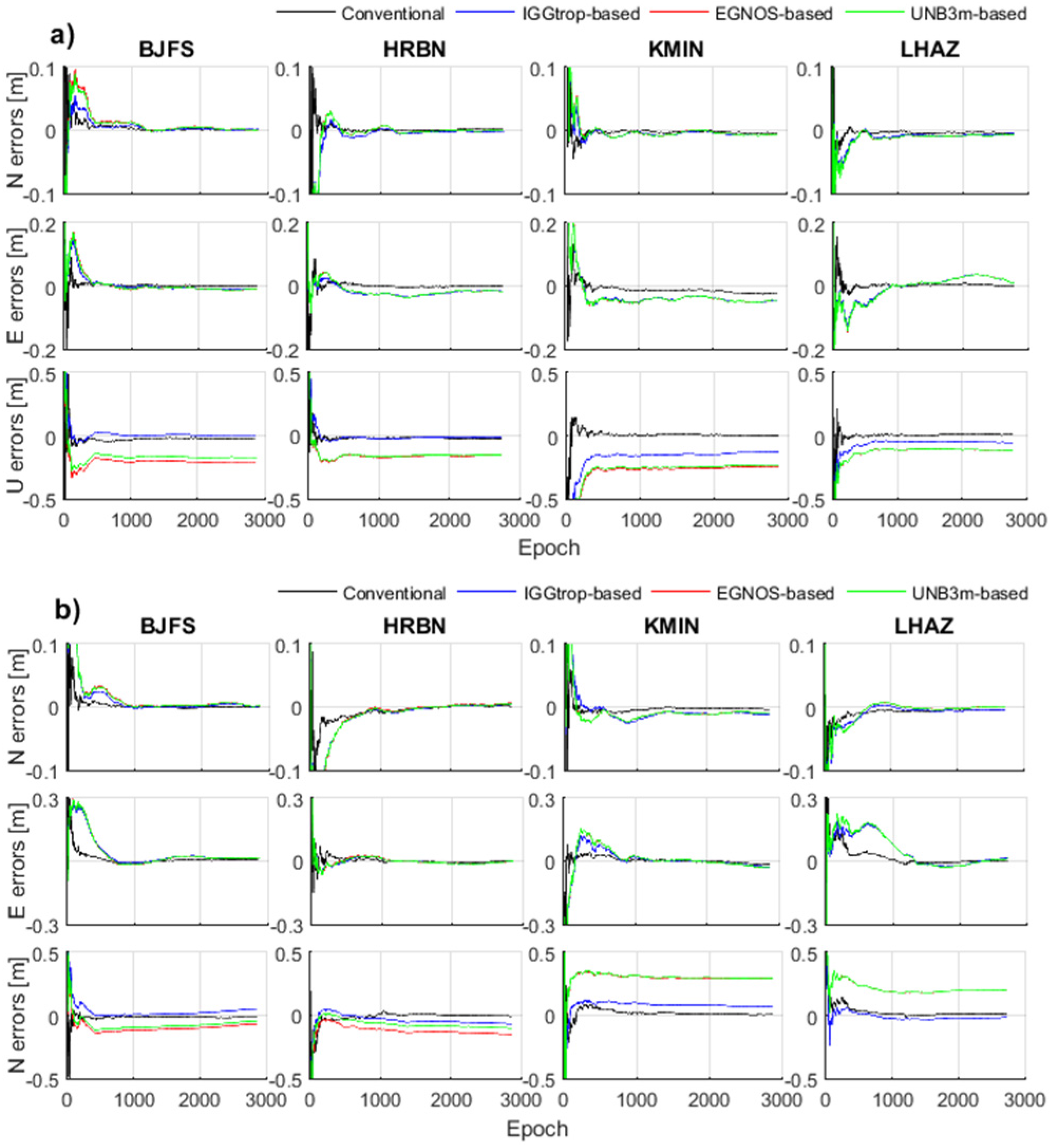
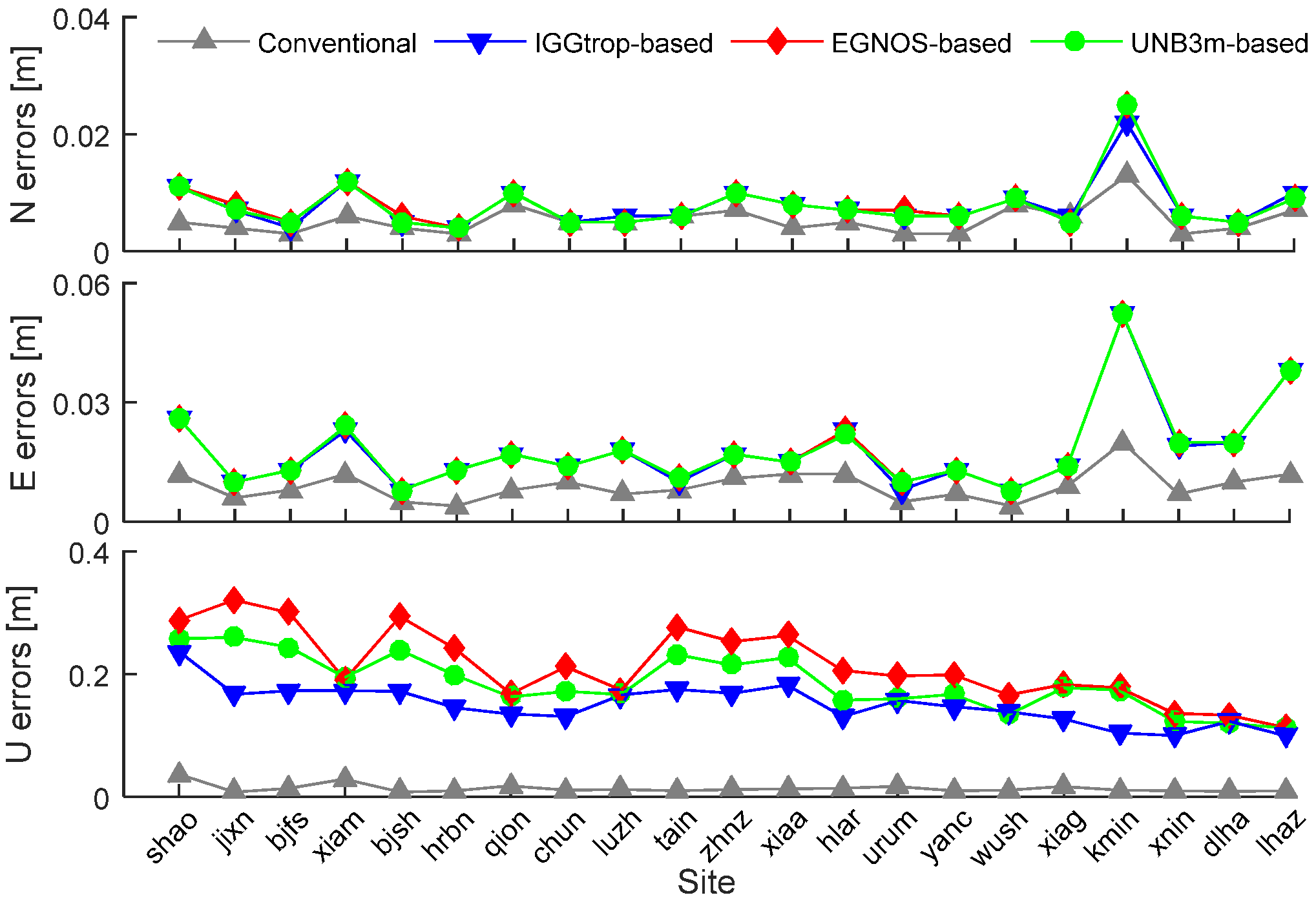
3.2. Effects of IGGtrop, EGNOS and UNB3m Models on PPP

| PPP | Mean Positioning Errors (cm) | |
|---|---|---|
| Horizontal | Vertical | |
| Conventional | 1.0 | 1.3 |
| IGGtrop-based | 1.9 | 15.0 |
| EGNOS-based | 2.0 | 21.4 |
| UNB3m-based | 1.9 | 19.0 |


4. Conclusions
- (1)
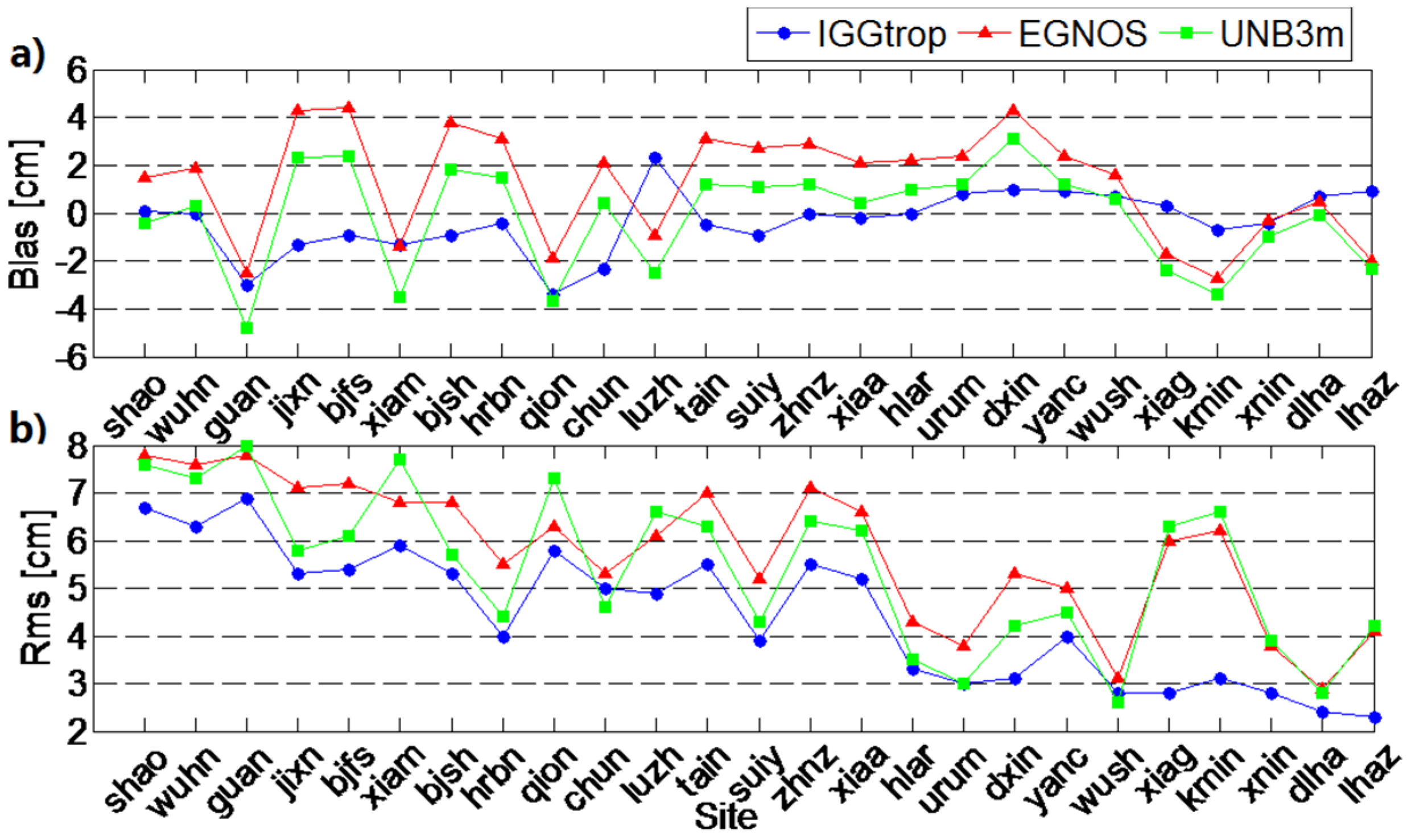
- The RMS of the IGGtrop model is 4.4 cm in the Chinese region, which is about 24% and 19% smaller than that of the EGNOS and UNB3m models, respectively.
- (2)
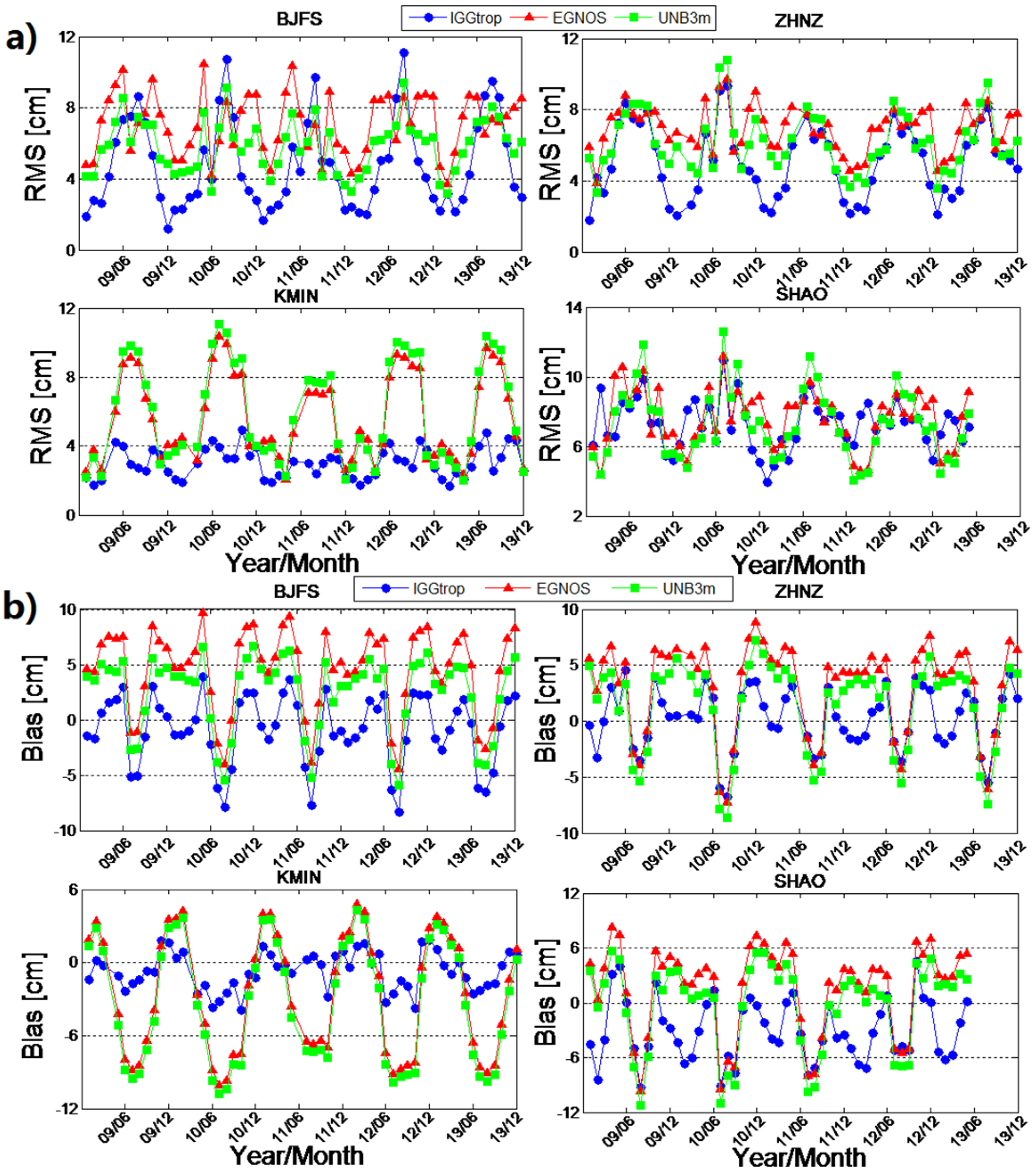
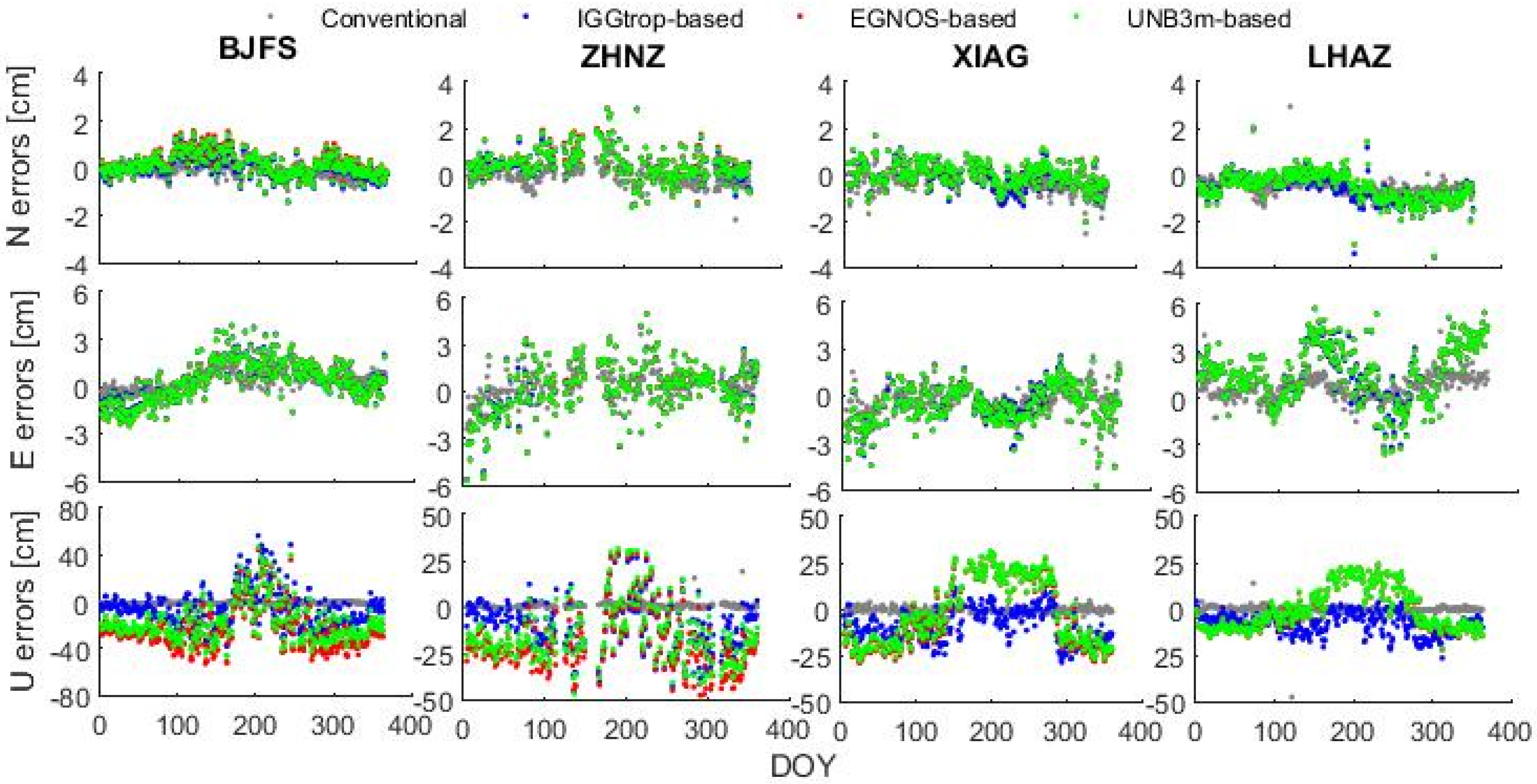
- The RMS and biases of the IGGtrop, EGNOS and UNB3m models show obviously seasonal variations. In addition, the biases of the IGGtrop model show semiannual variations at some stations.
- (3)
- The mean positioning error of the conventional PPP solutions is about 1.0 cm in horizontal components and is 1.3 cm in vertical components, which is relatively stable throughout the whole year of 2012. The mean vertical positioning error of the PPP solutions based on the IGGtrop model is about 15.0 cm, which is about 30% and 21% smaller than those of the EGNOS and UNB3m models, respectively.
- (4)
- Like the errors of the empirical models, the vertical positioning errors of the PPP solutions obtained by using empirical models also show clear seasonal variations, and the degree of the variations are usually larger than those of the empirical models’ errors.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Böhm, J.; Harald, S. Atmospheric Effects in Space Geodesy; Springer: Berlin, Germany, 2013; pp. 73–129. [Google Scholar]
- Gao, Y.; Chen, K. Performance analysis of precise point positioning using real-time orbit and clock products. Positioning 2004, 1, 95–100. [Google Scholar] [CrossRef]
- Chiang, K.; Duong, T.; Liao, J. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Yuan, Y.; Ou, J.; Li, H.; Li, Z. A new global zenith tropospheric delay model IGGtrop for GNSS applications. Chin. Sci. Bull. 2012, 57, 2132–2139. [Google Scholar] [CrossRef]
- Li, W.; Yuan, Y.; Ou, J.; Chai, Y.; Li, Z.; Liou, Y.; Wang, N. New versions of the BDS/GNSS zenith tropospheric delay model IGGtrop. J. Geod. 2015, 89, 73–80. [Google Scholar] [CrossRef]
- Leandro, R.; Santos, M.; Langley, R. UNB neutral atmosphere models: Development and performance. In Proceedings of the ION NTM, Monterey, CA, USA, 18–20 January 2006; pp. 564–573.
- Leandro, R.; Langley, R.; Santos, M. UNB3m_pack: A neutral atmosphere delay package for radiometric space techniques. GPS Solut. 2008, 12, 65–70. [Google Scholar]
- Dodson, A.; Chen, W.; Baker, H.; Penna, N.; Roberts, G.; Jeans, R.; Westbrook, J. Assessment of EGNOS tropospheric correction model. In Proceedings of the ION GPS 1999, Nashville, TN, USA, 14–17 September 1999.
- Penna, N.; Dodson, A.; Chen, W. Assessment of EGNOS tropospheric correction model. J. Navig. 2001, 54, 37–55. [Google Scholar] [CrossRef]
- Uemo, M.; Hoshinoo, K.; Matsunaga, K.; Kawai, M.; Nakao, H.; Langley, R.; Bisnath, S. Assessment of atmospheric delay correction models for the Japanese MSAS. In Proceedings of the ION GPS 2001, Salt Lake, UT, USA, 11–14 September 2001.
- Böhm, J.; Heinkelmann, R.; Schuh, H. Short Note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Lagler, K.; Schindelegger, M.; Böhm, J.; Krásná, H.; Nilsson, T. GPT2: Empirical slant delay model for radio space geodetic techniques. Geophy. Res. Lett. 2013, 40, 1069–1073. [Google Scholar] [CrossRef] [PubMed]
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Krueger, E.; Schueler, T.; Arbesser-Rastburg, B. The standard tropospheric correction model for the European satellite navigation system Galileo. In Proceedings of the General Assembly URSI, New Delhi, India, 23–29 October 2005.
- Schüler, T. The TropGrid2 standard tropospheric correction model. GPS Solut. 2014, 18, 123–131. [Google Scholar] [CrossRef]
- Mendes, V.; Collins, J.; Langley, R. The effect of tropospheric propagation delay errors in airborne GPS precision positioning. In Proceedings of the ION GPS-95, Palm Springs, CA, USA, 12–15 September 1995.
- Collins, J.; Langley, R. Estimating the residual tropospheric delay for airborne differential GPS positioning. In Proceedings of the ION GPS’97, 10th International Technical Meeting of the Satellite Division of the Institute of Navigation, Kansas, MO, USA, 16–19 September 1997.
- Wielgosz, P.; Krukowska, M.; Paziewski, J.; Krypiak-Gregorczyk, A.; Stepniak, K.; Kaplon, J.; Bosy, J. Performance of ZTD models derived in near real-time from GBAS and meteorological data in GPS fast-static positioning. Meas. Sci. Technol. 2013, 24, 2084–2090. [Google Scholar] [CrossRef]
- Chen, W.; Gao, C.; Pan, S. Assessment of GPT2 empirical troposphere model and application analysis in precise point positioning. In China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume II; Springer: Berlin, Germany; Heidelberg, Germany, 2014; pp. 451–463. [Google Scholar]
- Leandro, R.; Santos, M.; Langley, R. A North America wide area neutral atmosphere model for GNSS applications. Navigation 2009, 56, 57–71. [Google Scholar] [CrossRef]
- Andrei, C.; Chen, R. Assessment of time-series of troposphere zenith delays derived from the Global Data Assimilation System numerical weather model. GPS Solut. 2009, 13, 109–117. [Google Scholar] [CrossRef]
- Ibrahim, H.; El-Rabbany, A. Performance analysis of NOAA tropospheric signal delay model. Meas. Sci. Technol. 2011, 22, 115107–115113. [Google Scholar] [CrossRef]
- Kouba, J. Testing of global pressure/temperature (GPT) model and global mapping function (GMF) in GPS analyses. J. Geod. 2008, 83, 199–208. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. A Comprehensive Evaluation and Analysis of the Performance of Multiple Tropospheric Models in China Region. IEEE Trans. Geosci. Remote Sens. 2015, 99, 1–16. [Google Scholar] [CrossRef]
- Bisnath, S.; Gao, Y. Current state of precise point positioning and future prospects and limitations. In Observing Our Changing Earth; Springer: Berlin, Germany; Heidelberg, Germany, 2009; pp. 615–623. [Google Scholar]
- Zhang, B.; Ou, J.; Yuan, Y.; Li, Z. Extraction of line-of-sight ionospheric observables from GPS data using precise point positioning. Sci. China Earth Sci. 2012, 55, 1919–1928. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.G. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Sci. Bull. 2015, 60, 1840–1849. [Google Scholar] [CrossRef]
- Xu, A.; Xu, Z.; Ge, M.; Xu, X.; Zhu, H.; Sui, X. Estimating zenith tropospheric delays from BeiDou navigation satellite system observations. Sensors 2013, 13, 4514–4526. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Wang, C.; Guo, J.; Liu, X. Assessment of the Contribution of BeiDou GEO, IGSO, and MEO Satellites to PPP in Asia-Pacific Region. Sensors 2015, 12, 29970–29983. [Google Scholar] [CrossRef] [PubMed]
- Niell, A. Global mapping functions for the atmosphere delay at radio wavelengths. J. Geophys. Res. Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Yuan, Y.; Li, W.; Li, Y.; Chai, Y. Assessment of Three Tropospheric Delay Models (IGGtrop, EGNOS and UNB3m) Based on Precise Point Positioning in the Chinese Region. Sensors 2016, 16, 122. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010122
Zhang H, Yuan Y, Li W, Li Y, Chai Y. Assessment of Three Tropospheric Delay Models (IGGtrop, EGNOS and UNB3m) Based on Precise Point Positioning in the Chinese Region. Sensors. 2016; 16(1):122. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010122
Chicago/Turabian StyleZhang, Hongxing, Yunbin Yuan, Wei Li, Ying Li, and Yanju Chai. 2016. "Assessment of Three Tropospheric Delay Models (IGGtrop, EGNOS and UNB3m) Based on Precise Point Positioning in the Chinese Region" Sensors 16, no. 1: 122. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010122