
Non-Cooperative Target Imaging and Parameter Estimation with Narrowband Radar Echoes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
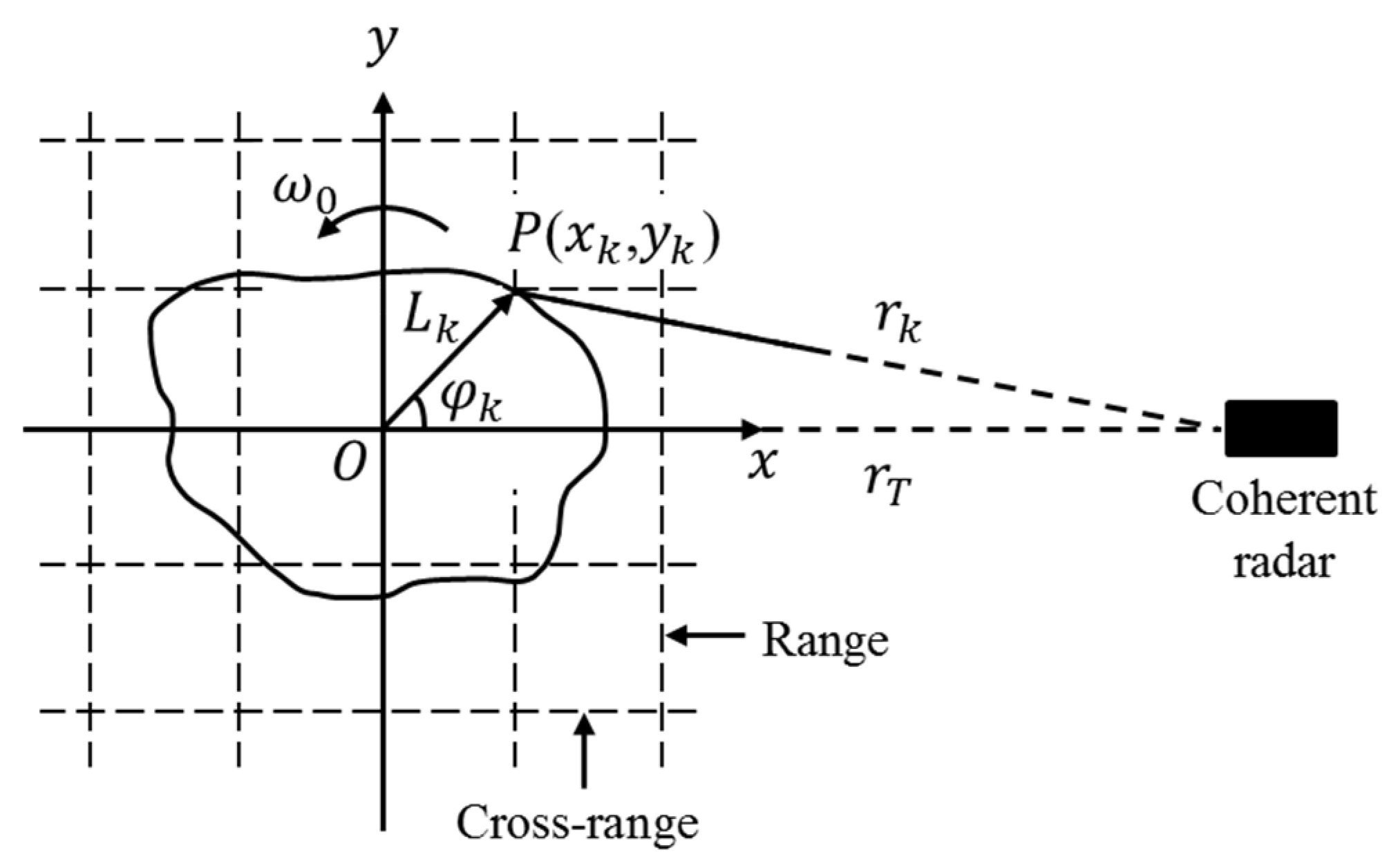
2. Narrowband Imaging Model of Rotating Objects
2.1. Narrowband Signal Model

2.2. 2D Imaging for Uniformly Rotating Objects
3. Rotation Motion Estimation
3.1. Analytic Rotation Estimation
3.2. Rotation Estimation by Image Rotation Correlation
3.3. Scattering Center Extraction and Association
- (1)
- The AJTF method is initialized as , .
- (2)
- The basis function in our method is constructed as:where is the radial velocity and acceleration which we want to estimate.
- (3)
- The projection value is then defined as:and the parameters are estimated by:
- (4)
- The component belonging to the scatter is removed from the signal, as:
4. Experimental Results
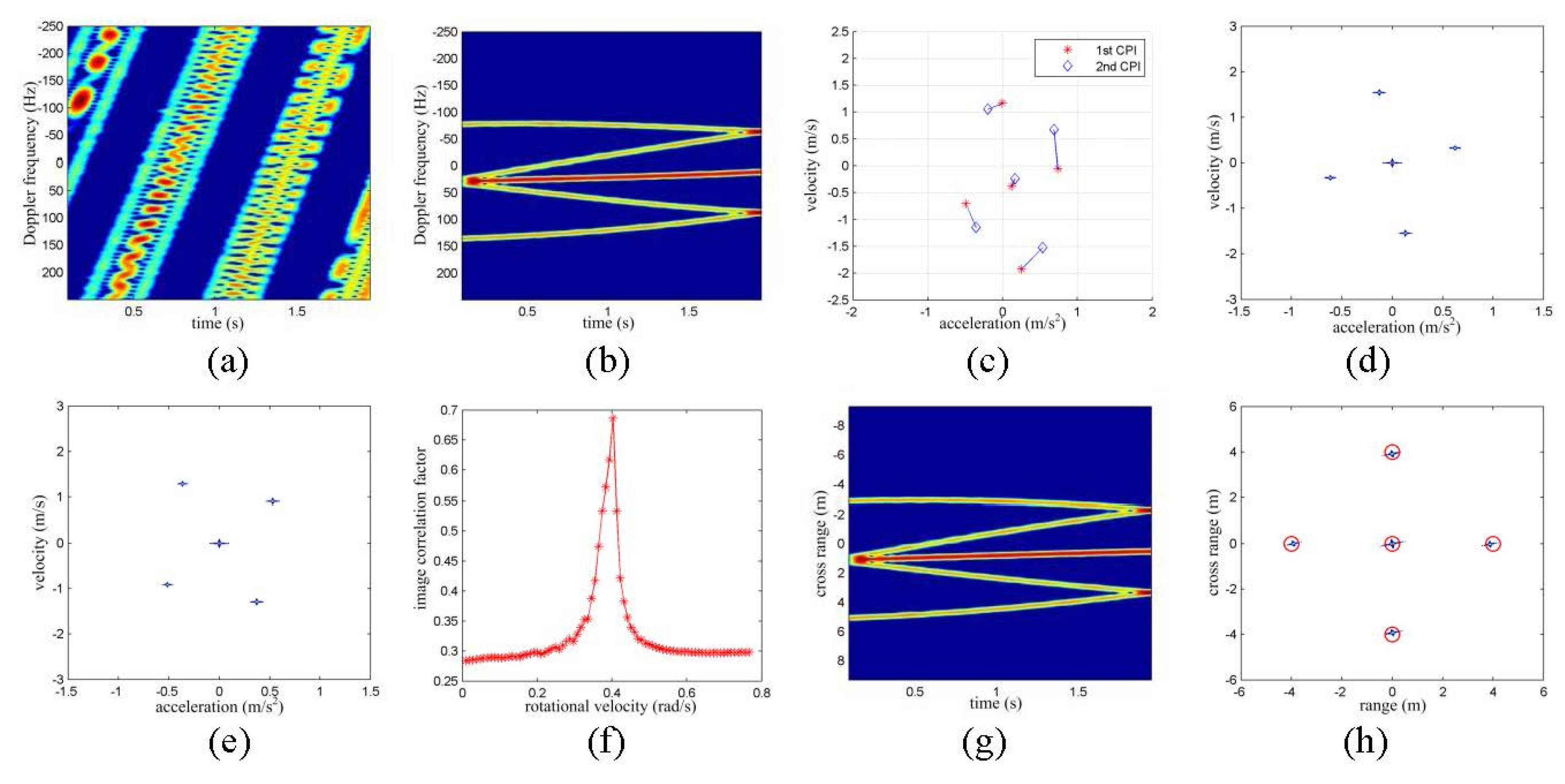
4.1. Numerical Experiments with Isolated Scattering Centers

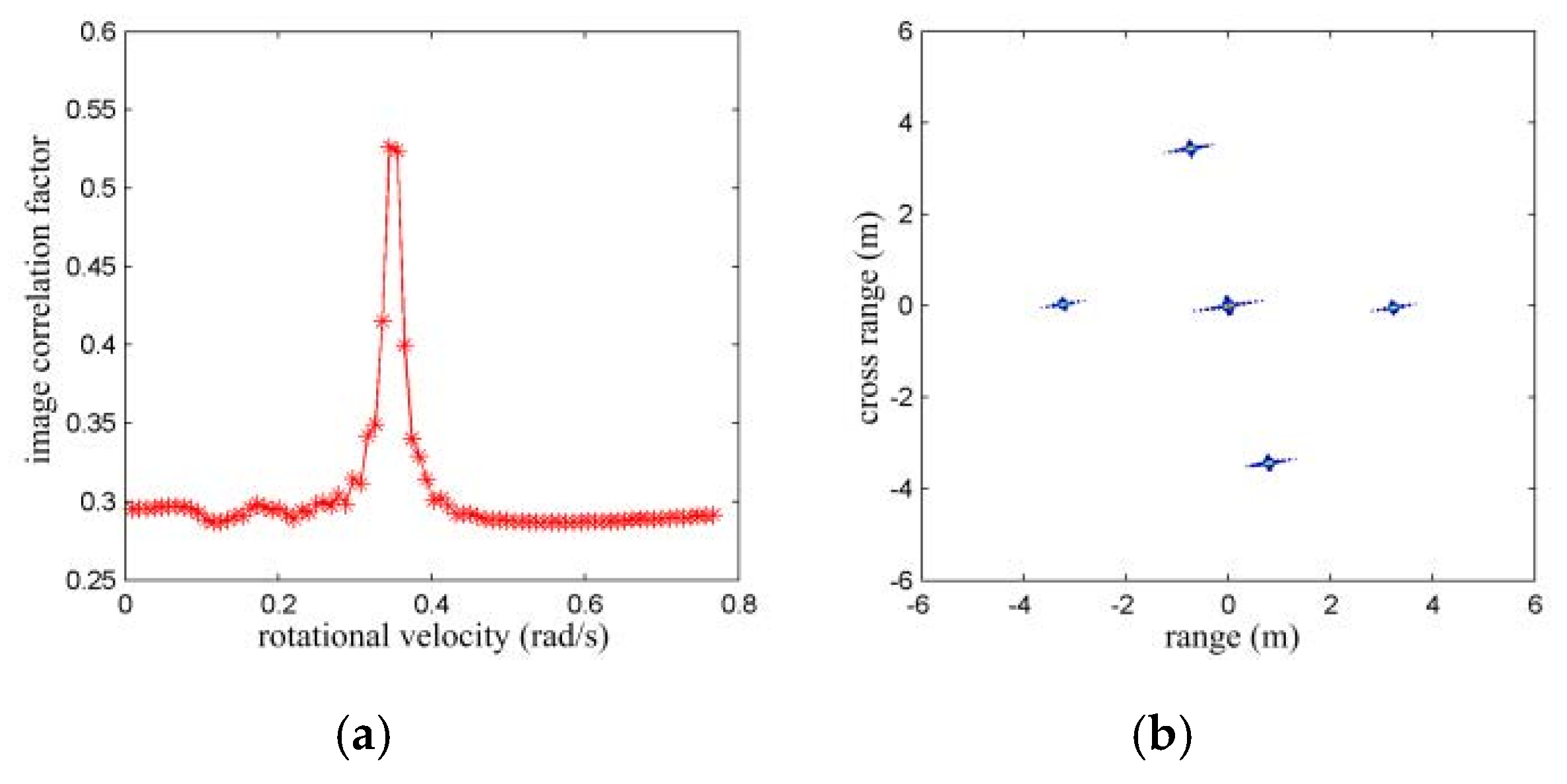
4.2. Experiments with RCS Simulation

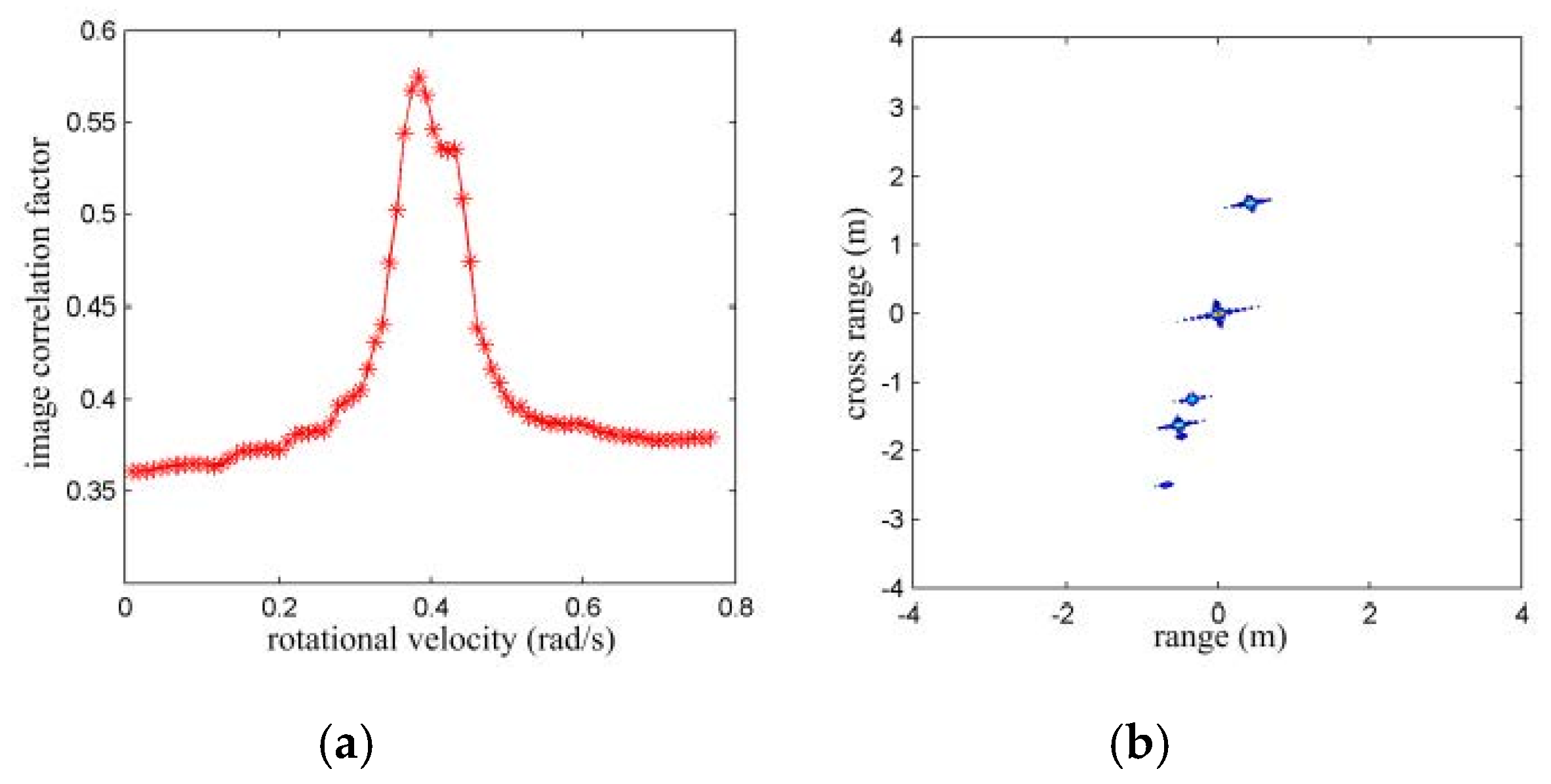
4.3. Experiments for Accelerated Rotating Objects


4.4. Some Analyses
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, C.-C.; Andrews, H.C. Target-motion-induced radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 2–14. [Google Scholar] [CrossRef]
- Martorella, M.; Giusti, E.; Demi, L.; Zhou, Z.; Cacciamano, A.; Berizzi, F.; Bates, B. Target recognition by means of polarimetric ISAR images. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 225–239. [Google Scholar] [CrossRef]
- Park, S.-H.; Joo, M.-G.; Kim, K.-T. Construction of ISAR training database for automatic target recognition. J. Electromagn. Waves Appl. 2011, 25, 1493–1503. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; Publishing House of Electronic Industry: Beijing, China, 2007; pp. 33–34. [Google Scholar]
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsler, H. Analysis of micro-doppler signatures. IEE Proc. Radar Sonar Navig. 2003, 150, 271–276. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.-S.; Wechsler, H. Micro-doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Ying, L.; Bai, Y.Q.; Zhang, Q.; Duan, Y.L.; Zhu, F. Translational motion compensation and micro-doppler feature extraction of ballistic targets. J. Electron. Inf. Technol. 2012, 34, 602–608. [Google Scholar]
- Chen, V.C. The Micro-Doppler Effect in Radar; Artech House: Boston, MA, USA, 2011; pp. 26–28. [Google Scholar]
- Li, J.; Qiu, C.-W.; Zhang, L.; Xing, M.; Bao, Z.; Yeo, T.-S. Time-frequency imaging algorithm for highspeed spinning targets in two dimensions. IET Radar Sonar Navig. 2010, 4, 806–817. [Google Scholar] [CrossRef]
- Sato, T. Shape estimation of space debris using single-range doppler interferometry. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1000–1005. [Google Scholar] [CrossRef]
- Wang, Q.; Xing, M.; Lu, G.; Bao, Z. SRMF-clean imaging algorithm for space debris. IEEE Trans. Antennas Propag. 2007, 55, 3524–3533. [Google Scholar] [CrossRef]
- Bai, X.; Xing, M.; Zhou, F.; Bao, Z. High-resolution three-dimensional imaging of spinning space debris. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2352–2362. [Google Scholar]
- Huang, Y.J.; Wang, X.; Li, X.; Moran, B. Inverse synthetic aperture radar imaging using frame theory. IEEE Trans. Signal Process. 2012, 60, 5191–5200. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. A novel algorithm for estimating the rotation angle in ISAR imaging. IEEE Geosci. Remote Sens. Lett. 2008, 4, 608–609. [Google Scholar] [CrossRef]
- Martorella, M. Novel approach for ISAR image cross-range scaling. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 281–294. [Google Scholar] [CrossRef]
- Yeh, C.-M.; Xu, J.; Peng, Y.-N.; Xia, X.-G.; Wang, X.-T. Rotational motion estimation for ISAR via triangle pose difference on two range-doppler images. IET Radar Sonar Navig. 2010, 4, 528–536. [Google Scholar] [CrossRef]
- Yeh, C.-M.; Xu, J.; Peng, Y.-N.; Wang, X.-T. Cross-range scaling for ISAR based on image rotation correlation. IEEE Geosci. Remote Sens. Lett. 2009, 6, 597–601. [Google Scholar]
- Park, S.H.; Kim, H.-T.; Kim, K.-T. Cross-range scaling algorithm for ISAR images using 2-D fourier transform and polar mapping. IEEE Trans. Geosci. Remote Sens. 2011, 49, 868–877. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F.; Xing, M.; Bao, Z. Scaling the 3-d image of spinning space debris via bistatic inverse synthetic aperture radar. IEEE Geosci. Remote Sens. Lett. 2010, 7, 430–434. [Google Scholar] [CrossRef]
- Ai, X.; Feng, D.; Li, Y.; Dong, J.; Xiao, S. Bistatic Two-Dimensional Imaging of Spinning Targets. In Proceedings of the 2012 IEEE Radar Conference (RADAR), Atlanta, GA, USA, 7–11 May 2012; pp. 8–11.
- Wang, Y.; Ling, H.; Chen, V.C. ISAR motion compensation via adaptive joint time-frequency technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 670–677. [Google Scholar] [CrossRef]
- Abatzoglou, T.J.; Gheen, G.O. Range, radial velocity, and acceleration MLE using radar LFM pulse train. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 1070–1083. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeh, C.-m.; Zhou, W.; Lu, Y.-b.; Yang, J. Non-Cooperative Target Imaging and Parameter Estimation with Narrowband Radar Echoes. Sensors 2016, 16, 125. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010125
Yeh C-m, Zhou W, Lu Y-b, Yang J. Non-Cooperative Target Imaging and Parameter Estimation with Narrowband Radar Echoes. Sensors. 2016; 16(1):125. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010125
Chicago/Turabian StyleYeh, Chun-mao, Wei Zhou, Yao-bing Lu, and Jian Yang. 2016. "Non-Cooperative Target Imaging and Parameter Estimation with Narrowband Radar Echoes" Sensors 16, no. 1: 125. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010125