
Intravehicular, Short- and Long-Range Communication Information Fusion for Providing Safe Speed Warnings

 , ,
, , 

Abstract
:1. Introduction
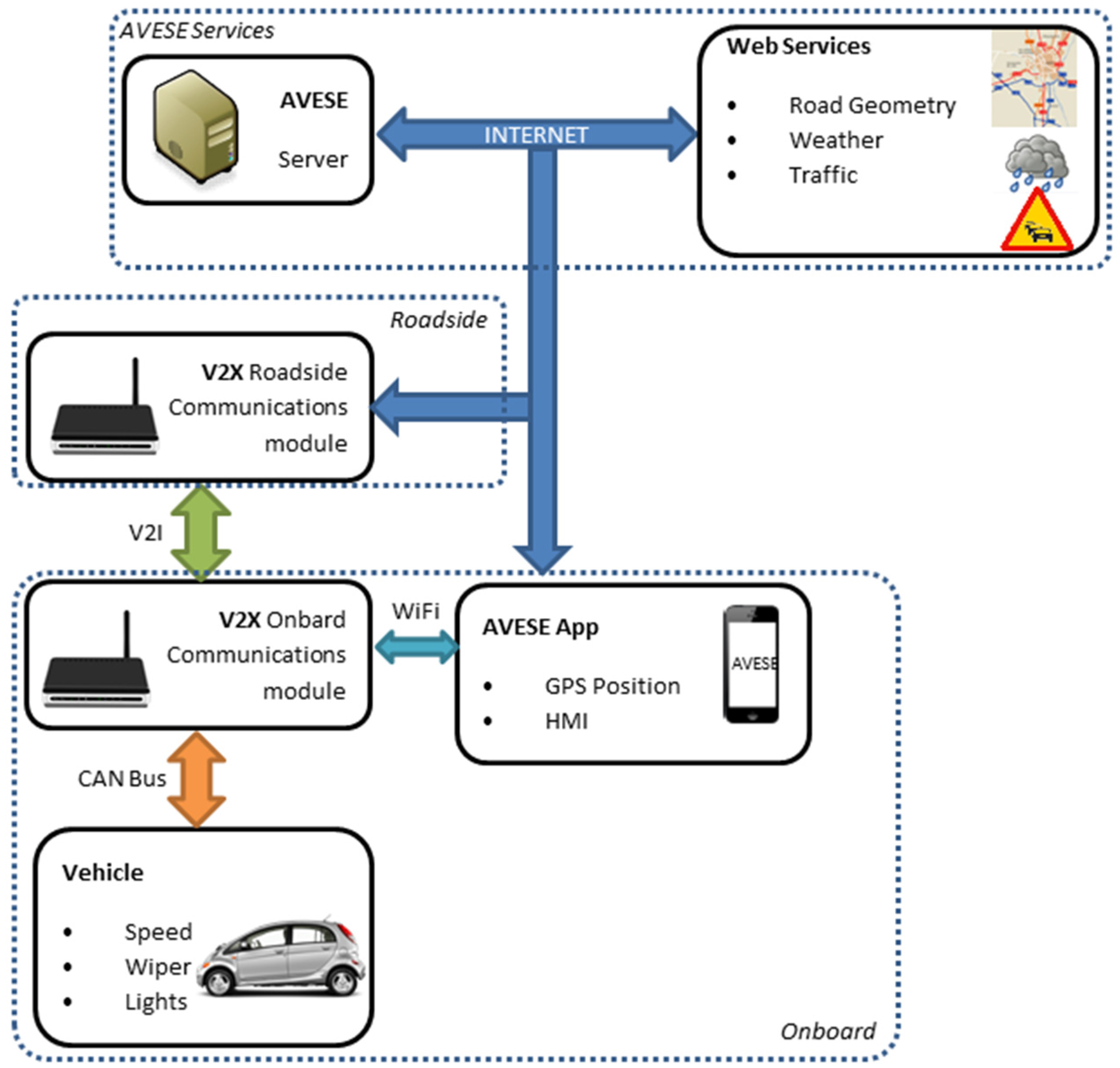
- Use of the in-vehicle CAN bus to infer possible situations of rain or fog quickly without waiting for wireless communication with external information sources. This fact makes updating dynamic information more flexible because providing information from a control centre involves some delays. Obviously, in-vehicle information should be corroborated with external information in a short time window.
- Use of short-range communications to obtain information from the roadside. This solution could be similar to the implementation of variable information panels on the infrastructure but the cost is much lower and information points on the infrastructure could be placed closer together, providing more continuous information. These communications could be used when local dynamic changes that could not be appreciated by on-board sensors appear (for example, the movement of a shock wave caused by a traffic jam).
- Use of long-range communications to obtain information from a control centre that collects information from different sources (even the vehicles equipped with the system). This information can corroborate data provided from sources 1 and 2, but a certain delay in processing and transmitting is unavoidable. Furthermore, some information, such as the road geometry characteristics of specific road sections, is relocated to the server that is accessed from the vehicles, releasing the onboard device from having this heavy information and easing the updating process.
2. System Layout

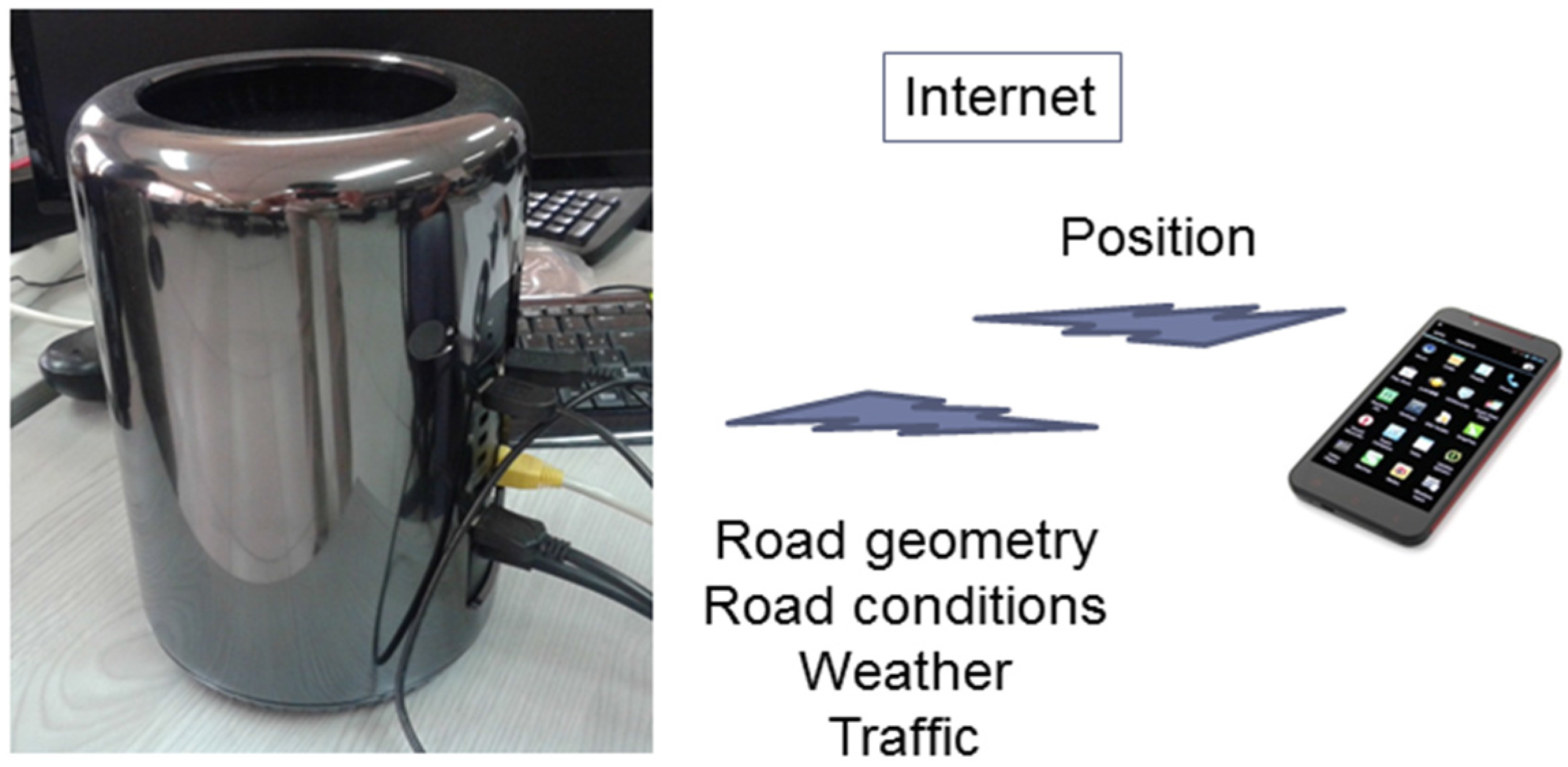
3. Server Information

4. System Communications


5. Human-Machine Interface
5.1. HMI Definition
- (1)
- Do not disturb. The system and the information content must increase safety. It must avoid producing potentially dangerous behaviours for the drivers or any other road user.
- (2)
- The attention required by the driver when interacting with the HMI must be compatible with the attention demanded by the driving task. Both tasks must be made compatible in order to avoid distractions or any reduction in the driving focus. The necessary attention that will be demanded by the secondary tasks in HMI interacting must be foreseen.
- (3)
- The HMI must not visually disturb the driver. It must be precise. It is important to ensure the minimum distraction of the driver when receiving and using the information provided by the HMI.
- (4)
- The interface must be coherent and compatible. Coherence affects the aspect of the design with elements like colours, icons and sounds that permit a balance between the similarity and differentiation of the presented information.
- (5)
- Visual information must be designed so that the driver can assume the information as quickly as possible and without any negative effects on driving.
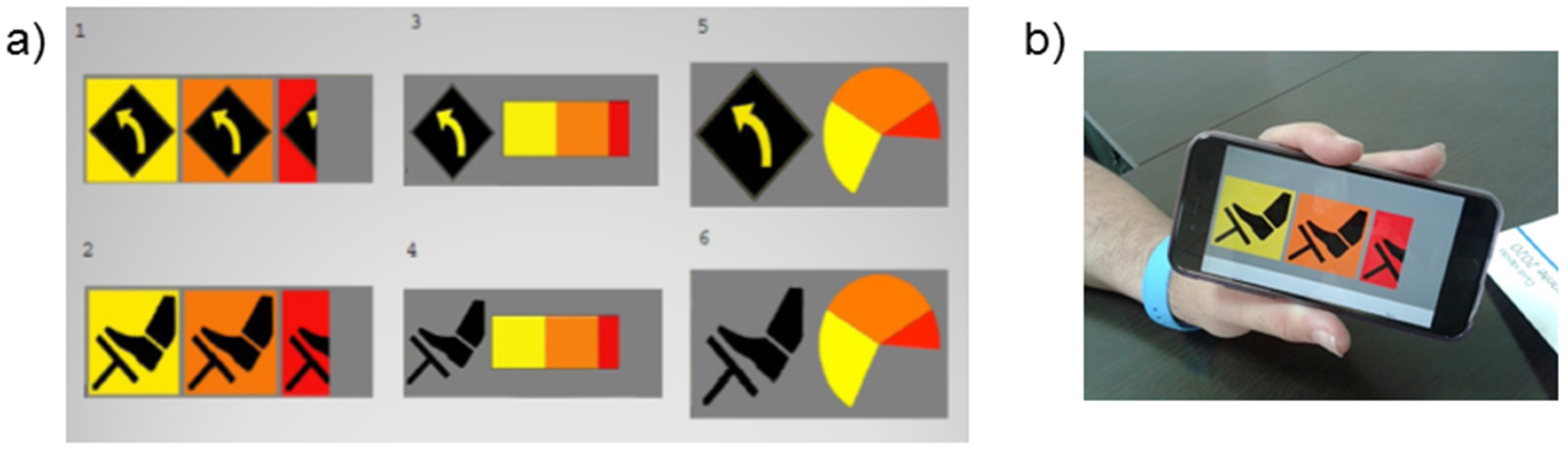
5.2. Warning Criteria

5.3. HMI Assessment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Value | Standard Deviation | |
|---|---|---|
| Age (years) | 35.35 | 13.23 |
| License experience (years) | 13,35 | 11.62 |
| Hours driven weekly (h) | 7.48 | 4.34 |

- Behaviour (number and intensity of braking)
- Distraction (flicker number, number and duration of eye fixations)
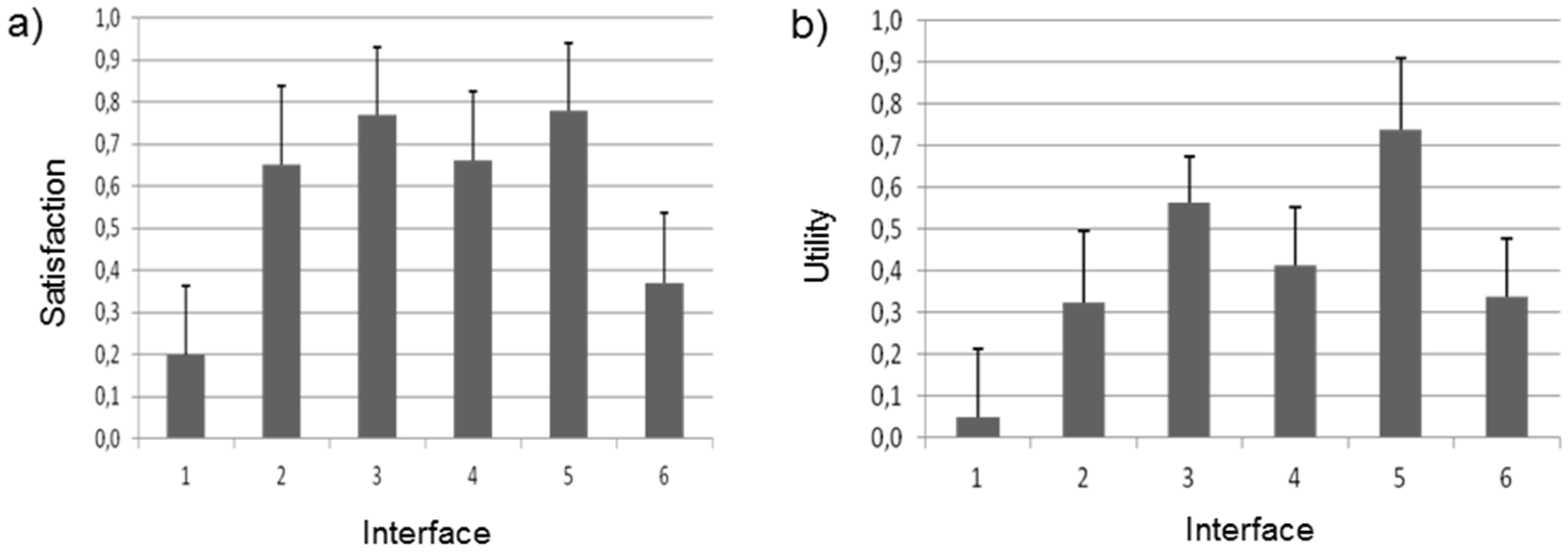
- Acceptance of the system (satisfaction, utility and usability)
- Mental load (using a subjective measure, RSME, and a physiological measure, pupil dilation)


6. Final Implementation

| Average Value | Standard Deviation | |||
| Differences of average travel speed with and without the system (%) | −0.58 | 0.81 | ||
| Differences of travel time with and without the system (%) | 0.81 | 0.79 | ||
| Without the System | With the System | |||
| Average Value | Standard Deviation | Average Value | Standard Deviation | |
| Frequency of safe speed exceeding (%) | 18.25 | - | 9.625 | - |
| Difference between maximum and safe speeds in Zones B (km/h) | 6.53 | 8.36 | 2.50 | 5.95 |
| Difference between median and safe speeds in Zones B (km/h) | −0.28 | 6.66 | −2.96 | 5.14 |
| Difference between maximum and minimum speeds in Zones B (km/h) | 13.54 | 7.23 | 10.45 | 5.31 |
| Maximum speed differences among drivers in Zones B (km/h) | 18.22 | 3.56 | 11.78 | 5.83 |
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- European Commission. Road Infrastructure Safety Management: Report of the Working Group on Infrastructure Safety; European Commission, DG Transport and Energy: Brussels, Belgium, 2003. [Google Scholar]
- Jiménez, F. Sistema de Adaptación de la Velocidad de Los Vehículos Automóviles a la Geometría de la Carretera. Ph.D. Thesis, Technical University of Madrid, Madrid, Spain, 2006. [Google Scholar]
- Carsten, O.; Comte, S.L.Y.; Tate, F.N. Traffic calming with new technology: Accident savings and driver behavior. In Proceedings of the Extraordinary Workshop of ICTCT, New Delhi, India, 2–3 March 2000.
- Carsten, O.Y.; Tate, F. Intelligent speed adaptation: The best collision avoidance system? In Proceedings of the 17th International Technical Conference on the Enhanced Safety of Vehicles, Amsterdam, The Netherlands, 4–7 June 2001.
- Várhelyi, A. Effects, acceptance and implications of ISA-Results from research in Lund. In Proceedings of the 12th ICTCT Workshop, Kaiserslautern, Germany, 28–29 October 1999.
- VArhelyi, A.; Makinen, T. The effects of in-car speed limiters: Field studies. Transp. Res. C 2001, 9, 191–211. [Google Scholar] [CrossRef]
- Hjalmdahl, M.; Varhelyi, A. Speed regulation by in-car active accelerator pedal. Effects on driver behaviour. Transp. Res. F 2004, 7, 77–94. [Google Scholar] [CrossRef]
- Carsten, O.; Fowkes, M. ISA UK. Intelligent Speed Adaptation. Project Summary, Institute for Transport Studies; University of Leeds: Leeds, UK, 2002. [Google Scholar]
- Lahrmann, H.; Agerholm, N.; Tradisauskas, N. Spar paaFarten. An intelligent speed adaptation project in Denmark based on pay as you drive principles. In Proceedings of the 6th European Congress on Intelligent Transport Systems, Aalborg, Denmark, 18–20 June 2007.
- Ehrlich, J.; Marchi, M.; Jarri, P. LAVIA. The French ISA project: Main issues and first results on technical tests. In Proceedings of the 10th World Congress and Exhibition on Intelligent Transport Systems and Services, Madrid, Spain, 16–20 November 2003.
- Páez, J.; Aparicio, F.; Jiménez, F.Y.; Moreno, F. Statistical analysis of the influence of using an ISA system on accident reduction. The Spanish case. In Proceedings of the FISITA 2006, Yokohama, Japan, 22–27 October 2006.
- Besseling, J.F.M. Intelligent speed adaptation. The Dutch experiment. In Proceedings of the Urban Transport Systems Conference, Lund, Sweden, 7–8 June 1999.
- Aparicio, F.; Páez, J.; Moreno, F.; Jiménez, F.; López, A. Discussion of a new adaptive speed control system incorporating the geometric characteristics of the roadway. Int. J. Veh. Auton. Syst. 2005, 3, 47–64. [Google Scholar] [CrossRef]
- Jiménez, F.; Aparicio, F.; Páez, J. Evaluation of in-vehicle dynamic speed assistance in Spain: Algorithm and driver behaviour. IET Intell. Transp. Syst. 2008, 2, 132–142. [Google Scholar] [CrossRef]
- Aparicio, F.; Páez, J.; Moreno, F.; Jiménez, F. El Sistema de Control Inteligente de Velocidad (ISA); FITSA: Madrid, Spain, 2005. (In Spanish) [Google Scholar]
- Jiménez, F.; Liang, Y.; Aparicio, F. Adapting ISA system warnings to enhance user acceptance. Accid. Anal. Prev. 2012, 48, 37–48. [Google Scholar] [CrossRef] [PubMed]
- Machata, K. An Austrian National View of ISA. The Project RONCALLI; Austrian Road Safety Board: Vienna, Austria, 2003. [Google Scholar]
- Maurer, P. Increasing Road-Safety by The Use of Telematics—Described on the Austrian Project “RONCALLI”; Arsenal Research: Vienna, Austria, 2005. [Google Scholar]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. C 2007, 15, 312–328. [Google Scholar] [CrossRef] [Green Version]
- Mechanical Simulation Corporation. CARSIM 5: Math Models Manual; Mechanical Simulation Corporation: Ann Arbor, MI, USA, 2001. [Google Scholar]
- Aparicio, F.; Jiménez, F.; Sánchez, J. Development and use of vehicle dynamics simulation software as support for Road Vehicles Theory teaching. Comput. Appl. Eng. Educ. 2009, 17, 467–478. [Google Scholar] [CrossRef]
- Huber, W.; Lädke, M.; Ogger, R. Extended floating-car data for the acquisition of traffic information. In Proceedings of the 6th Congress on ITS, Toronto, ON, Canada, 8–12 November 1999.
- Jiménez, F. Improvements in road geometry measurement using inertial measurement systems in datalog vehicles. Measurement 2011, 44, 102–112. [Google Scholar] [CrossRef]
- Jiménez, F.; Aparicio, F.; Estrada, G. Measurement uncertainty determination and curve fitting algorithms for development of accurate digital maps for Advanced Driver Assistance Systems. Transp. Res. C 2009, 17, 225–239. [Google Scholar] [CrossRef]
- Anaya, J.J.; Talavera, E.; Jiménez, F.; Serradilla, F.; Naranjo, J.E. Vehicle to Vehicle GeoNetworking using Wireless Sensor Networks. Ad Hoc Netw. 2015, 27, 133–146. [Google Scholar] [CrossRef]
- Ergonomics of Human-System Interaction—Usability Methods Supporting Human-Centered Design. ISO/TR 16982:2002. Available online: http://www.iso.org/iso/iso_catalogue/catalogue_tc/catalogue_detail.htm?csnumber=31176 (accessed on 20 January 2016).
- Van der Laan, J.D.; Heino, A.; de Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Transp. Res. C 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Brooke, J. SUS: A “quick and dirty” usability scale. In Usability Evaluation in Industry; Jordan, P.W., Thomas, B., Weerdmeester, B.A., McClelland, L.A., Eds.; Taylor and Francis: London, UK, 1996. [Google Scholar]
- Zijlstra, F.R.H. Efficiency in Work Behaviour: A Design Approach for Modern Tools; Delft University of Technology: Delft, The Netherlands, 1993. [Google Scholar]
- Pérez-Moreno, E.; Hernández-Lloreda, M.J.; Ruiz Gallego-Largo, T.; Castellanos, M.A. Impulsive Driving: Definition and measurement throught I-Drivind Scale (IDS). Span. J. Psychol. 2015, in press. [Google Scholar]
- Otmani, S.; Pebayle, T.; Roge, J.; Muzet, A. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiol. Behav. 2005, 84, 715–724. [Google Scholar] [CrossRef] [PubMed]
- Varhelyi, A.; Hjalmdahl, M.; Hyden, C. Effects of an active accelerator pedal on driver behaviour and traffic safety after long-term use in urban areas. Accid. Anal. Prev. 2004, 36, 729–737. [Google Scholar] [CrossRef] [PubMed]
- Agerholm, N.; Tradisauskas, N.; Harms, L. Preliminary results from the Danish project Spar paaFarten—Behavior. In Proceedings of the 6th European Congress on Intelligent Transport Systems, Aalborg, Denmark, 18–20 June 2007.
- DGT. Estrategia de Seguridad Vial 2011–2020; Dirección General de Tráfico: Madrid, Spain, 2013. (In Spanish) [Google Scholar]
- Bridger, R.; Patience, C. Consumer attitudes to and acceptance of driver assistance technologies. In Proceedings of the Telematics Automotive 2000, Birmingham, UK, 11–13 April 2000.
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiménez, F.; Naranjo, J.E.; Serradilla, F.; Pérez, E.; Hernández, M.J.; Ruiz, T.; Anaya, J.J.; Díaz, A. Intravehicular, Short- and Long-Range Communication Information Fusion for Providing Safe Speed Warnings. Sensors 2016, 16, 131. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010131
Jiménez F, Naranjo JE, Serradilla F, Pérez E, Hernández MJ, Ruiz T, Anaya JJ, Díaz A. Intravehicular, Short- and Long-Range Communication Information Fusion for Providing Safe Speed Warnings. Sensors. 2016; 16(1):131. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010131
Chicago/Turabian StyleJiménez, Felipe, Jose Eugenio Naranjo, Francisco Serradilla, Elisa Pérez, María Jose Hernández, Trinidad Ruiz, José Javier Anaya, and Alberto Díaz. 2016. "Intravehicular, Short- and Long-Range Communication Information Fusion for Providing Safe Speed Warnings" Sensors 16, no. 1: 131. https://0-doi-org.brum.beds.ac.uk/10.3390/s16010131