
A Crowd-Sourcing Indoor Localization Algorithm via Optical Camera on a Smartphone Assisted by Wi-Fi Fingerprint RSSI


Abstract
:1. Introduction
2. Related Works
- (1)
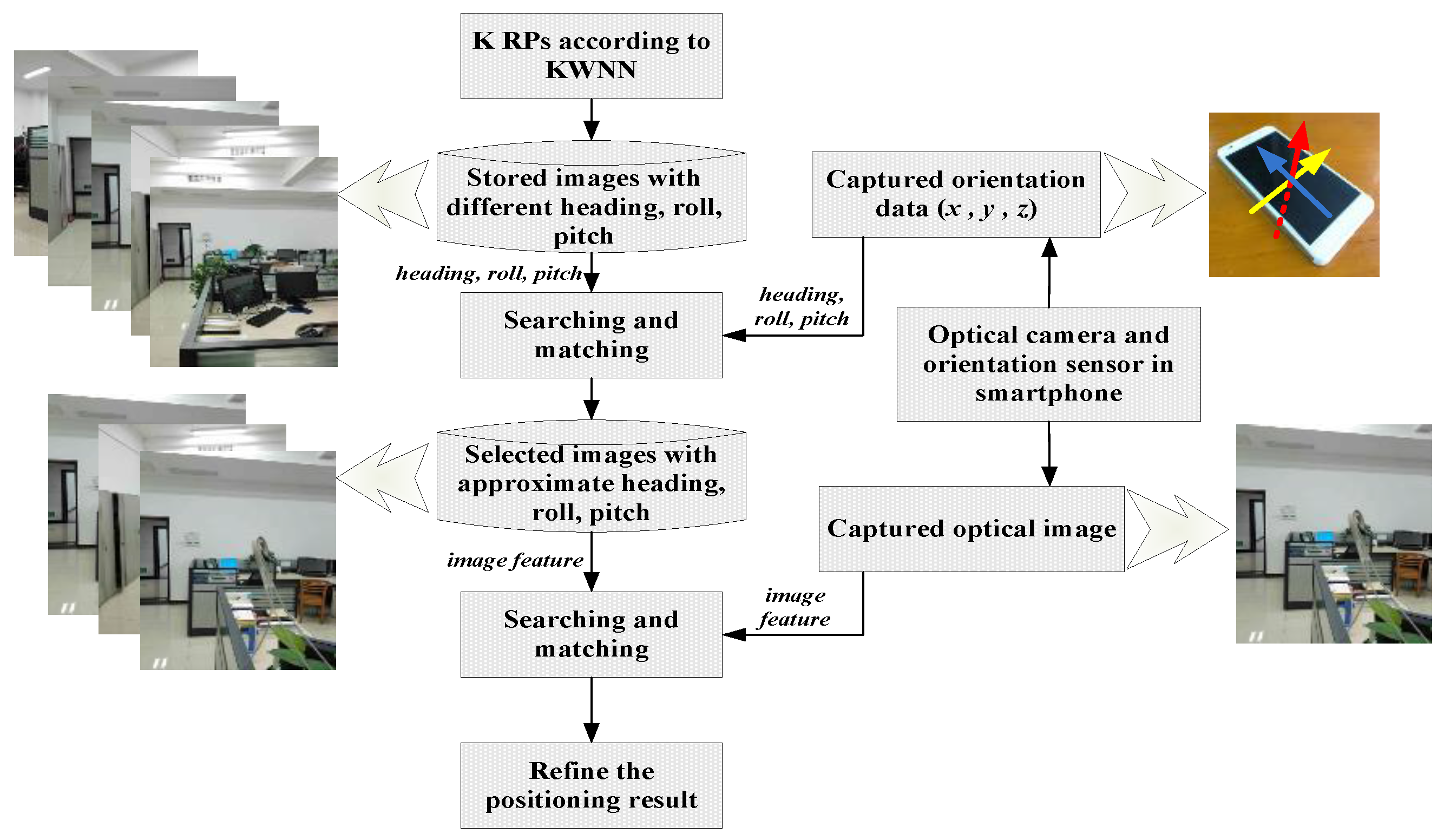
- In the preliminary positioning stage, we use a KWNN-based Wi-Fi fingerprint positioning algorithm to make a coarse estimation, then select K images corresponding to K-nearest neighbors as retrievable images to reduce the time spent in retrieving images.
- (2)
- After Wi-Fi fingerprint positioning, we introduce an orientation matching factor calculated using a three-dimensional orientation sensor on a smartphone to constrain random images choice for a coarse estimated location, then, we use the SIFT operator to extract image features to calculate the image matching factor on a multithread mechanism.
- (3)
- We propose a mean-weighted exponent algorithm to improve accuracy by fusing the KWNN algorithm, orientation matching factor, and image matching factor.
- (4)
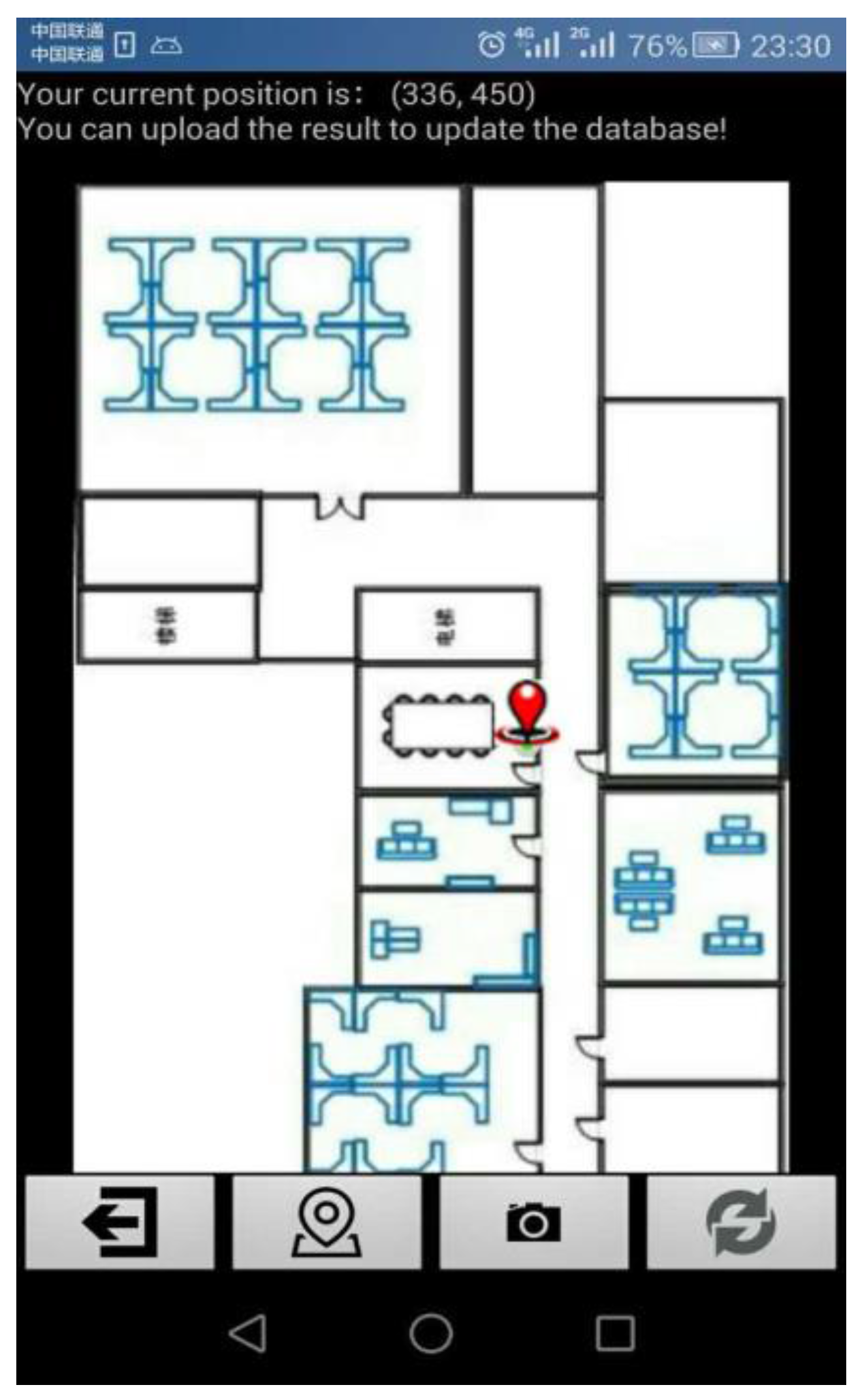
- We use crowd-sourcing to update the database; users can upload their positioning results to a server, which can aids others’ positioning the next time if the database has not recorded some RPs information in the offline stage.
- (5)
- Our algorithm has been realized in an Android operating system smartphone, and is easy to implement and apply. There is no need to use additional hardware assistance and the costs are greatly reduced.
3. Overview of the Proposed Sensors-Calibrated Positioning System
4. Crowd-Sourcing Localization Assisted by Wi-Fi Fingerprints
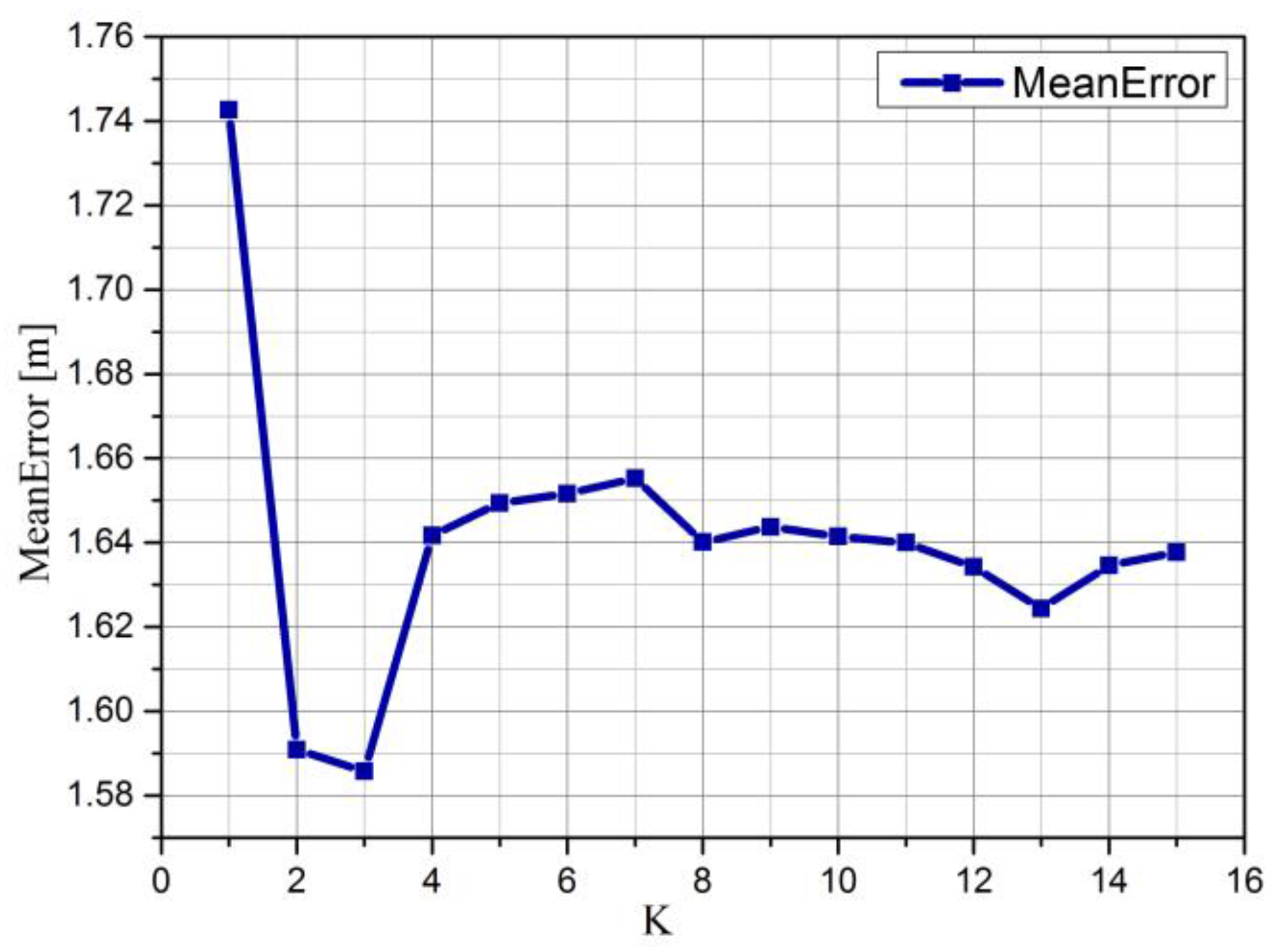
4.1. Wi-Fi Fingerprint Positioning Based on KWNN
4.2. Precise Localization Calibrated with Built-in Sensors on a Smartphone
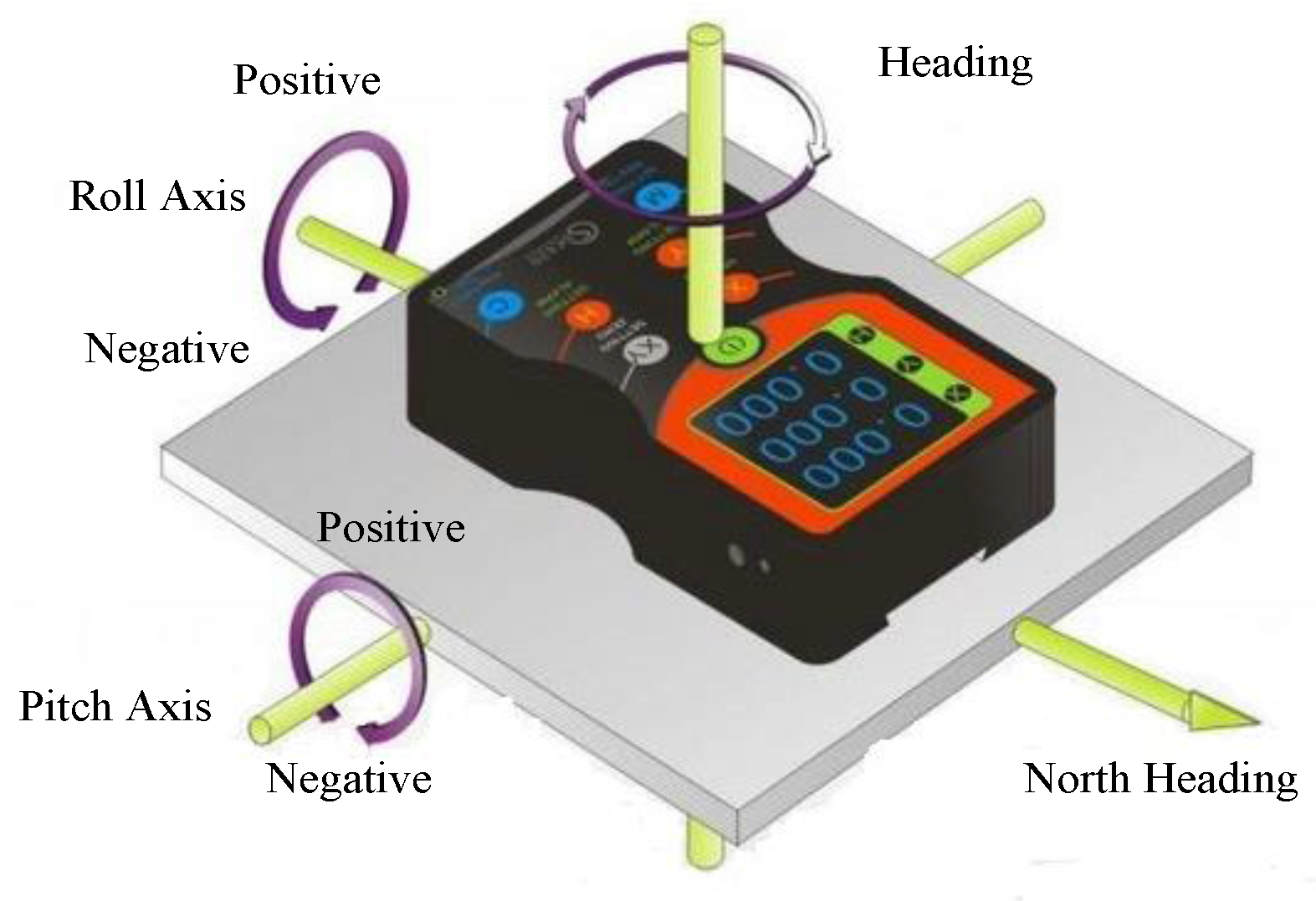
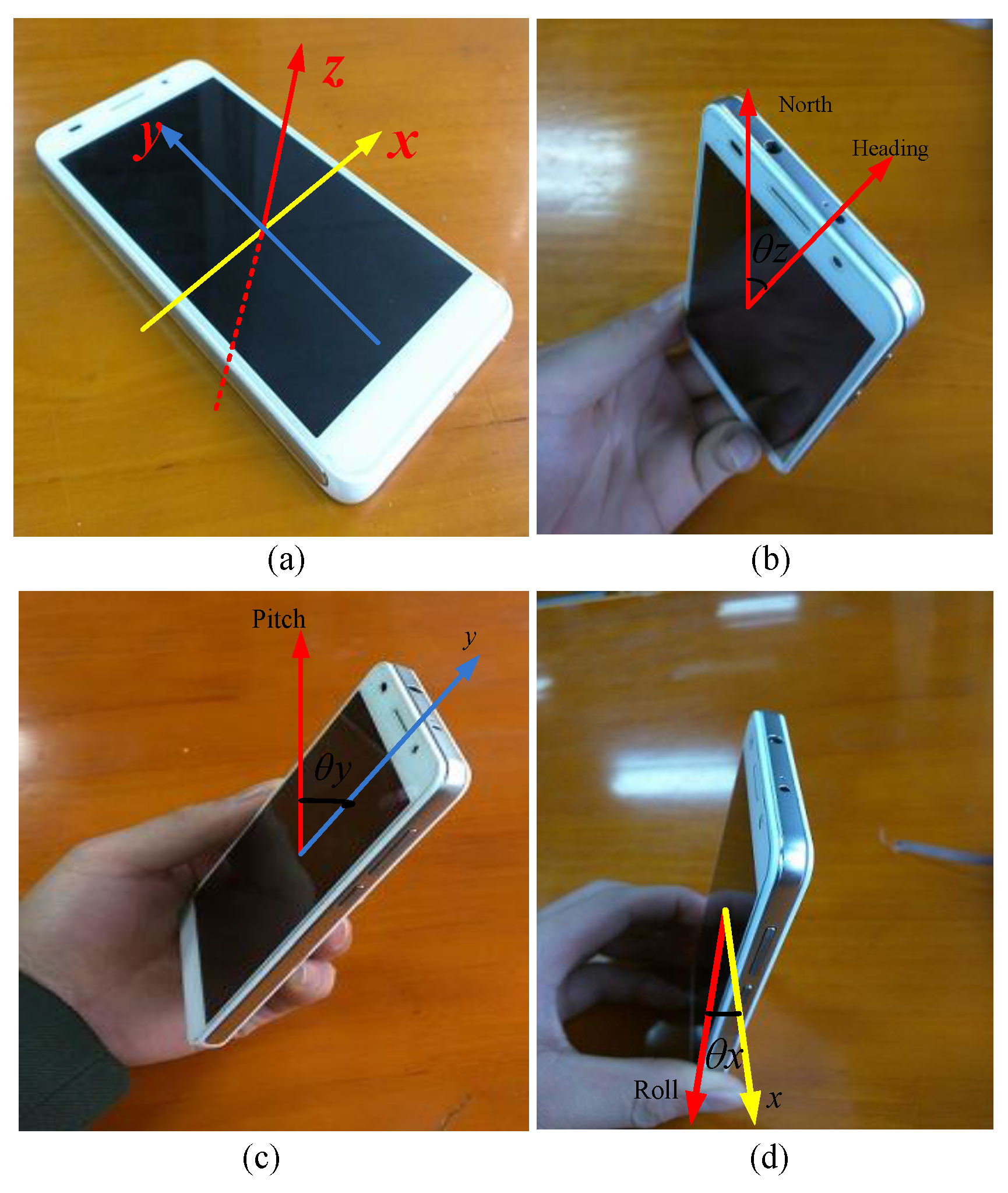
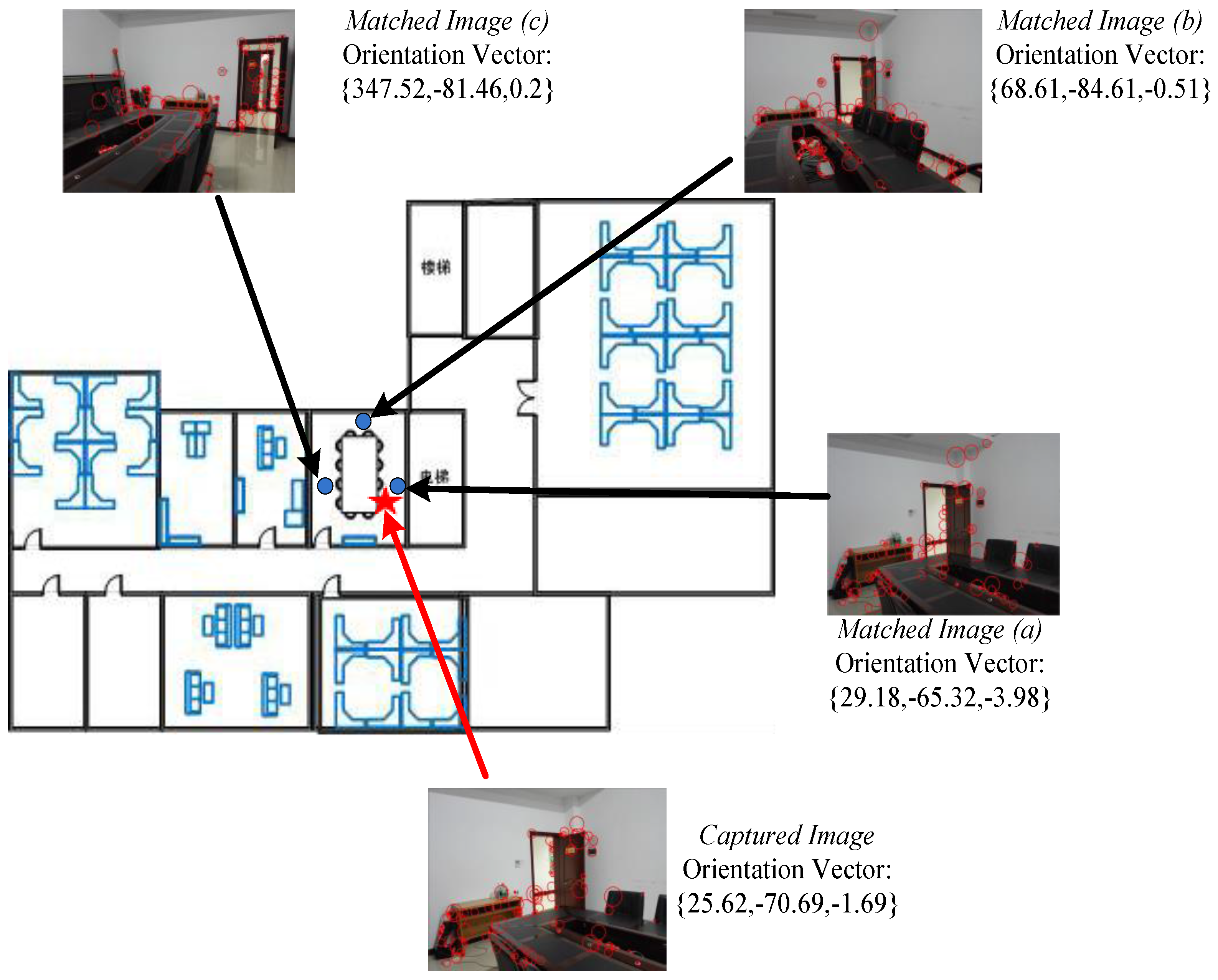
4.2.1. Three-Dimensional Orientation Matching
4.2.2. Image Feature Matching by an Optical Camera
4.2.3. Precise Localization Using Mean-Weighted Exponent Algorithm
4.3. Updating the Database by Crowd-Sourcing
5. Experimental Results and Evaluation
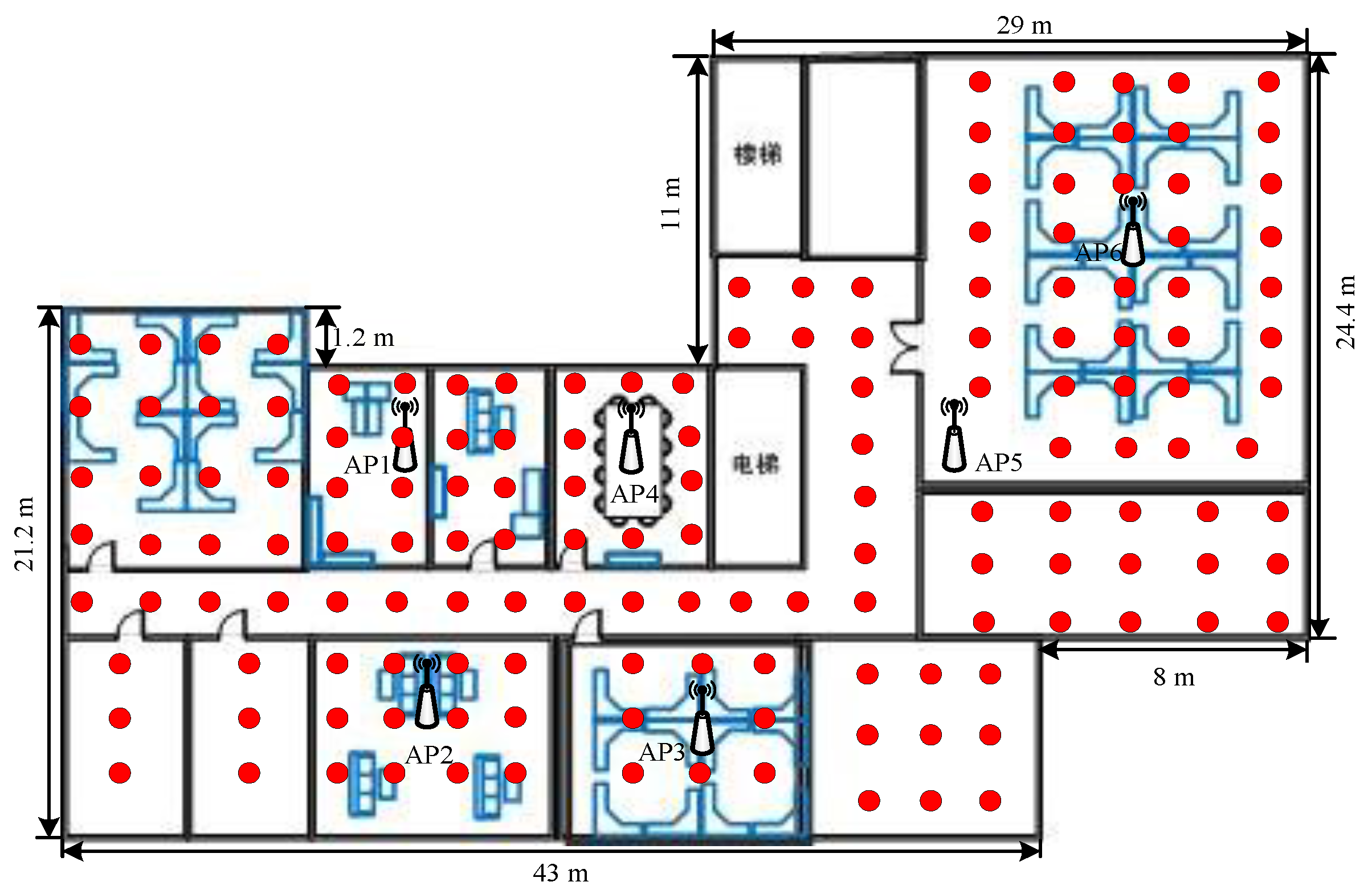
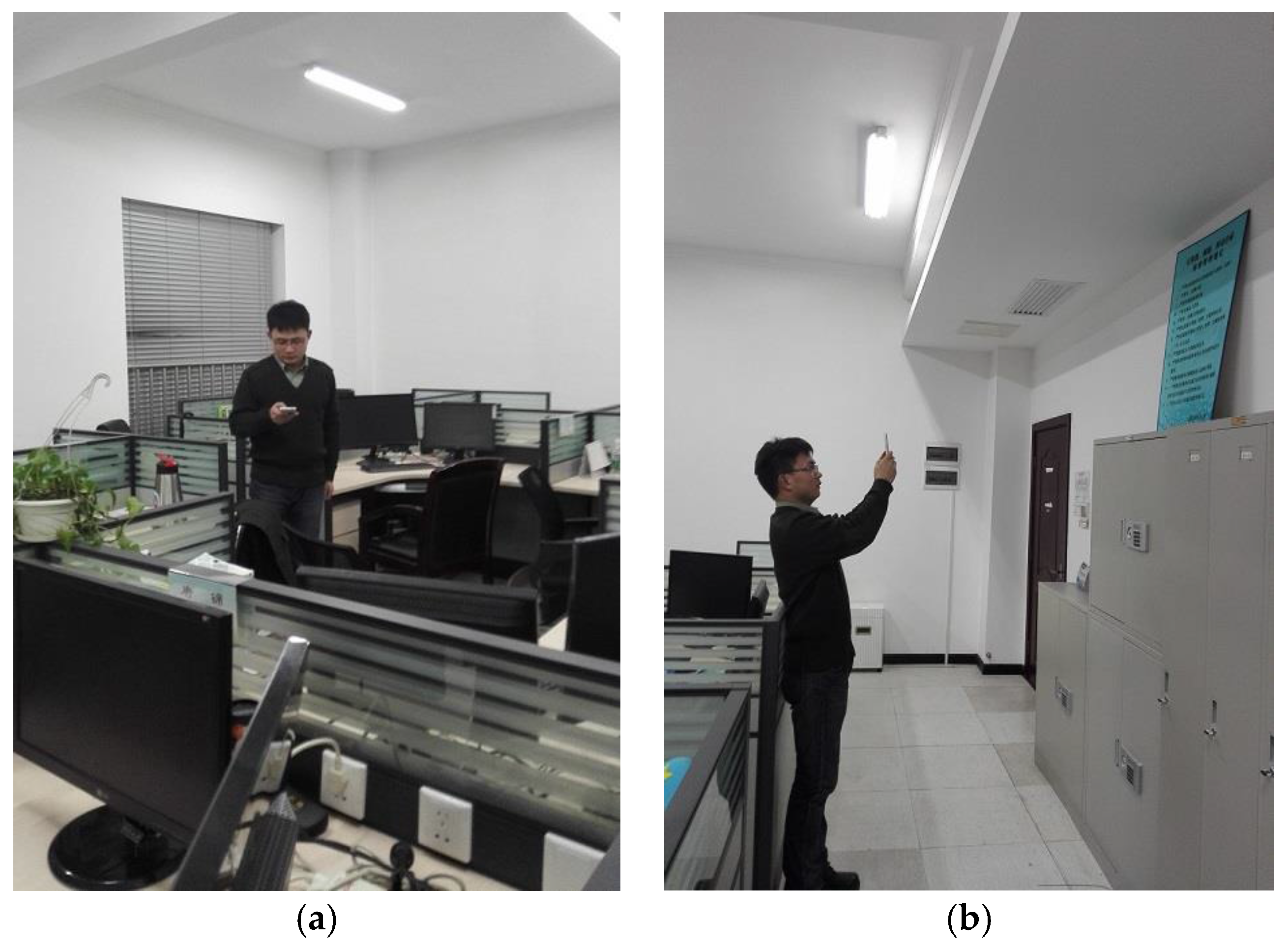
5.1. Experimental Setup
5.2. Experimental Results and Performance Evaluation
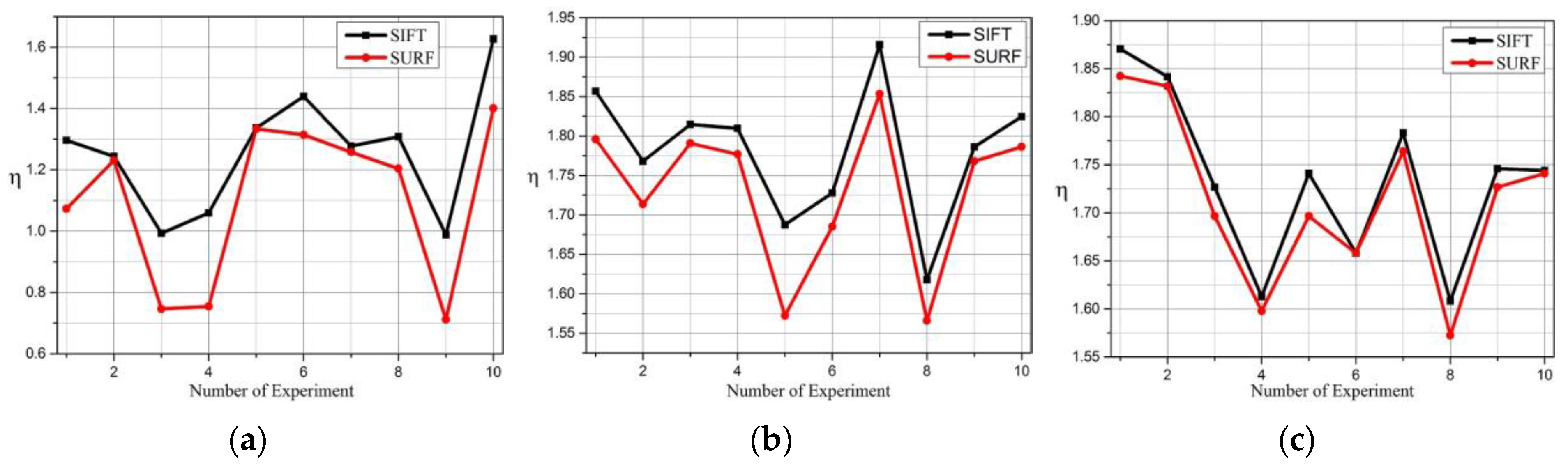
5.2.1. Image Matching Evaluation
5.2.2. Positioning Evaluation
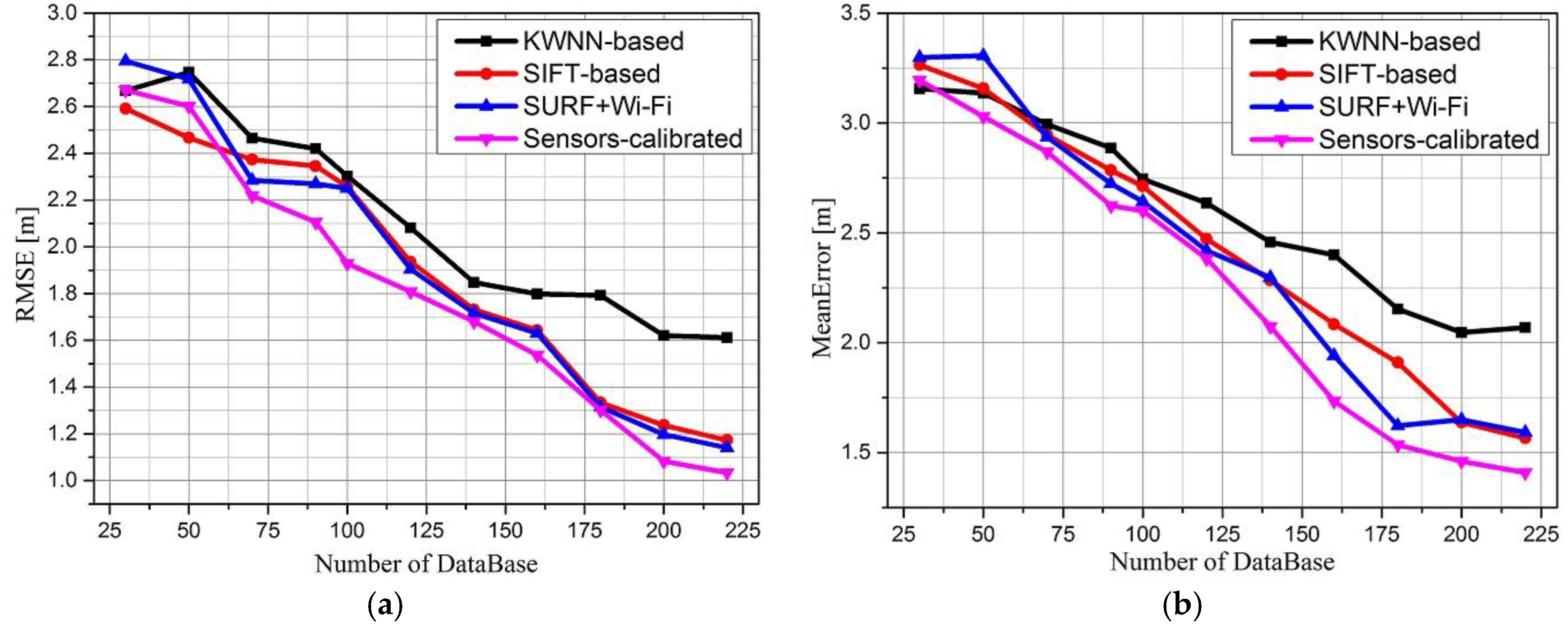
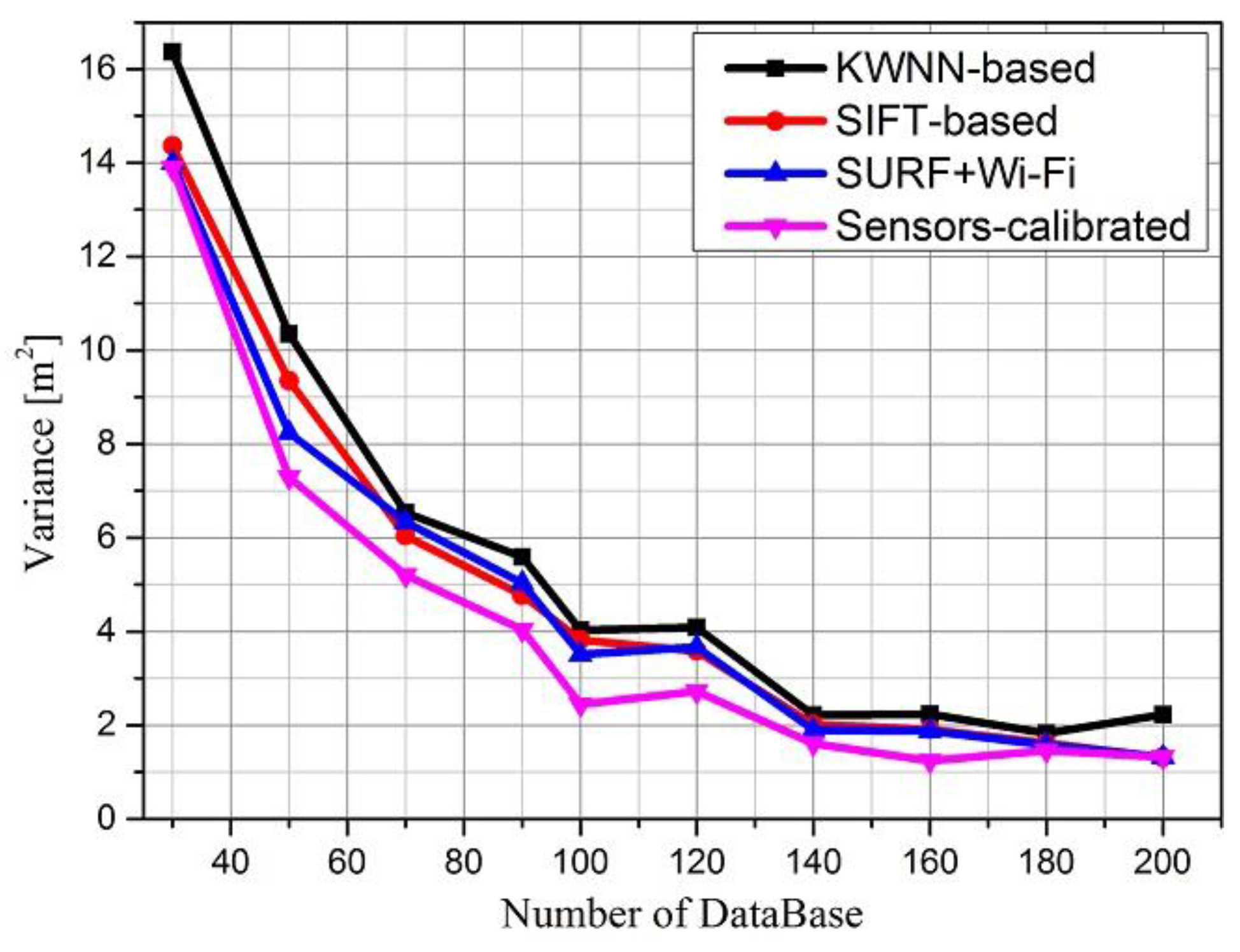
5.2.3. Performance of Crowd-Sourcing for Positioning
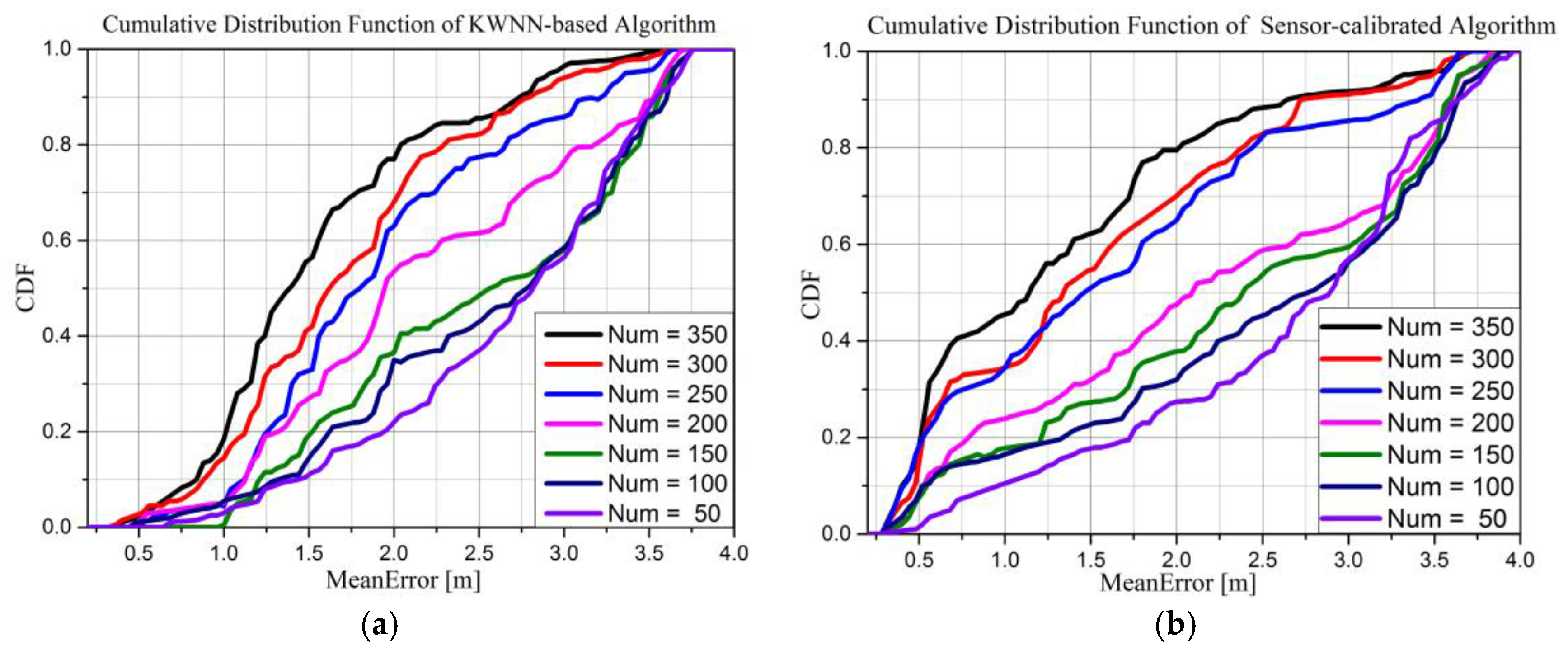
- (1)
- As the number of RPs in the database increases, the accuracy of the KWNN-based and our sensors-calibrated algorithm are both improved.
- (2)
- The sensors-calibrated algorithm has a better performance. For example, when the number of RPs is equal to 350, the mean error under 1 m of KWNN-based algorithm is about 20%, but, the mean error under 1 m of the proposed algorithm is about 46%, an obvious improvement.
- (3)
- For the same database, if the estimated results of the KWNN-based algorithm are more precise and more stable, which will choose better nearest neighbors, so finally, the accuracy of our sensors-calibrated algorithm will be better.
5.2.4. Performance Comparison of Time Consume for Positioning
6. Conclusions
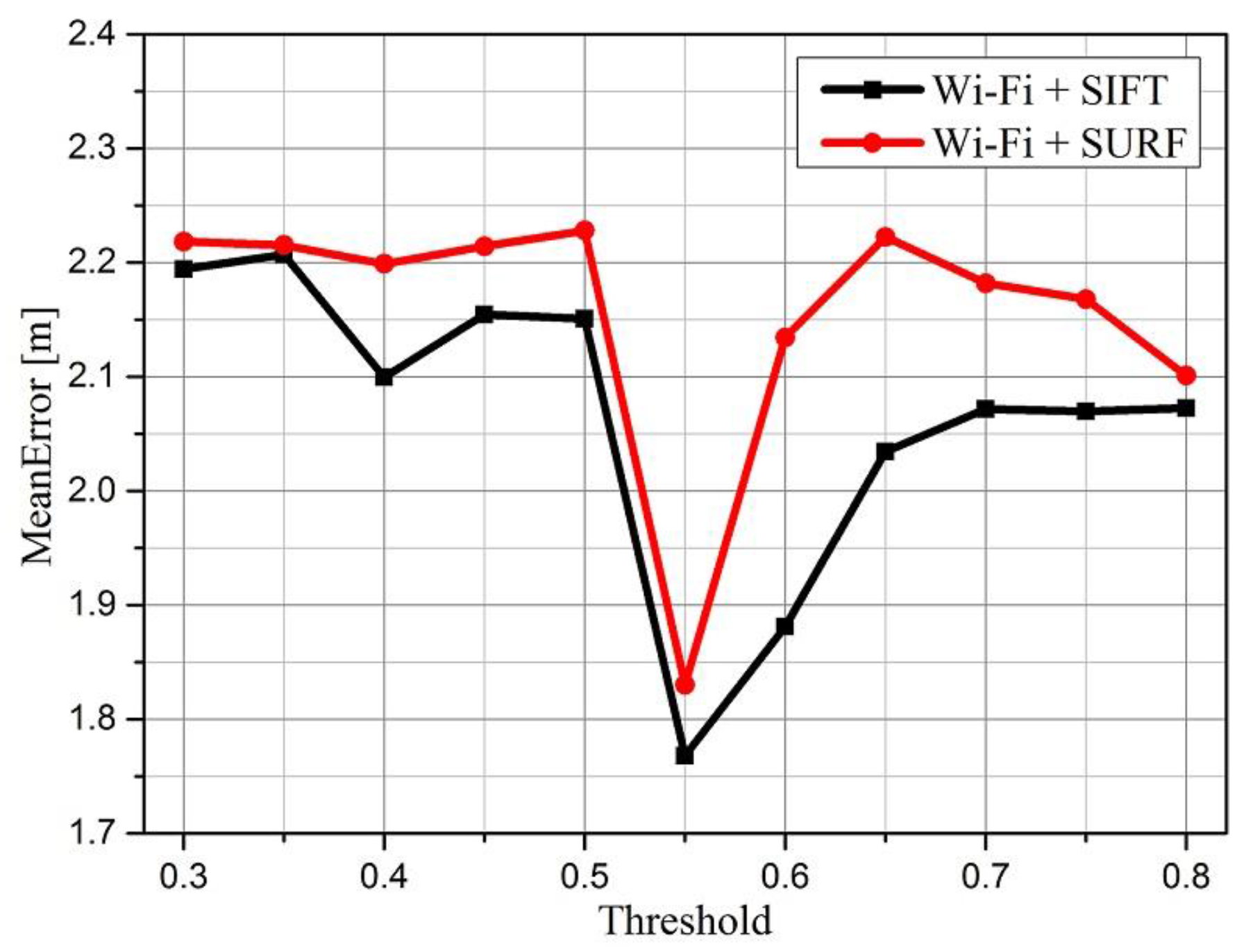
- (1)
- We explore the impact of SIFT and SURF thresholds on positioning when we choose the SIFT operator to extract image features. We conclude from our experiments that the positioning error is the least when the threshold is set as 0.55 in both the SIFT and SURF algorithms.
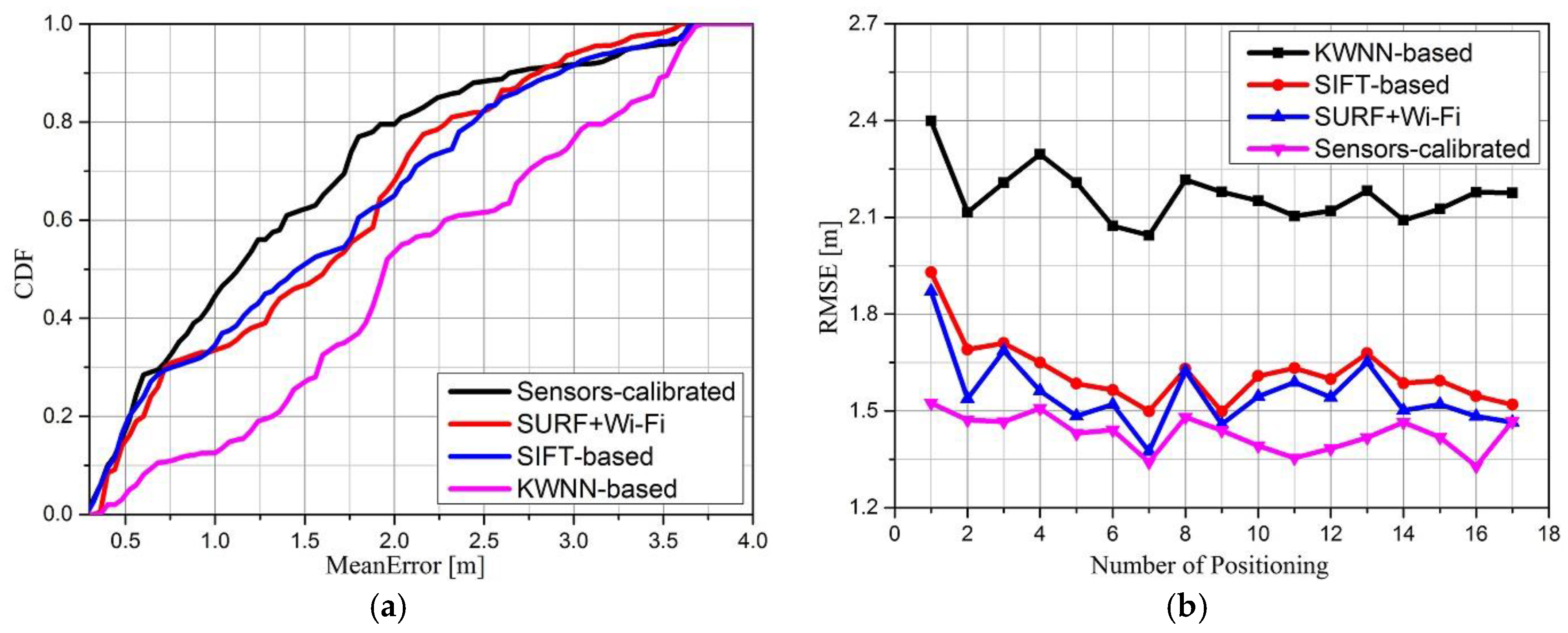
- (2)
- We propose a mean-weighted exponent algorithm to fuse the output of the built-in sensors in a smartphone. Small scale real-case scenarios results demonstrate that the proposed algorithm has a better performance because of its nonlinearity to calibrate the positioning accuracy.
- (3)
- We use crowd-sourcing to update and supplement the database. We also explored its influence on positioning. The experimental results show that the accuracy and stability of both algorithms have been improved, and the sensors-calibrated algorithm is obviously better than other three algorithms in this paper.
- (1)
- Higher performance. We apply the mean-weighted exponent algorithm to calculate the correction factors based on the output of the camera and orientation sensor. These factors will improve the performance of positioning system greatly in accuracy, stability, and applicability.
- (2)
- Easier usage. All required hardware is widely available in common smartphones. It is unnecessary to use deploy additional installations and users can use their smartphones for positioning in two modes: if high accuracy is unnecessary, they can choose Wi-Fi fingerprint positioning, otherwise, they can open the camera to improve the positioning results through the proposed sensors-calibrated algorithm.
- (3)
- Lower cost. The proposed algorithm can be implemented on a smartphone. Firstly, we use the smartphone to locate, and on the other hand, we adopt crowd-sourcing via the smartphone to update the database. Equally important, we do not need to preset tags for image identification in the indoor scenario. However, if we do preset tags for image identification, it will be better for our algorithm.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Monnerat, M.; Couty, R.; Vincent, N.; Huez, O.; Chatre, E. The assisted GNSS, technology and applications. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation, Long Beach, CA, USA, 21–24 September 2004; pp. 2479–2488.
- Deng, Z.; Zou, D.; Huang, J.; Chen, X.; Yu, Y.P. The assisted GNSS boomed up location based services. In Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–4.
- Wang, J.; Xu, G. Move Difference Relative Positioning Method Based on GNSS. Modern Navig. 2015, 3, 250–255. [Google Scholar]
- Chen, R.; Chu, T.; Li, J.; Li, X.; Chen, Y. DGNSS-C: A differential solution for enhancing smartphone GNSS performance. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 490–497.
- Xu, C.; Firner, B.; Zhang, Y.; Howard, R.; Li, J.; Lin, X. Improving RF-Based Device-Free Passive Localization in Cluttered Indoor Environments Through Probabilistic Classification Methods. In Proceedings of the 11th International Conference on Information Processing in Sensor Networks, Beijing, China, 16–20 April 2012; pp. 209–220.
- Schmitt, S.; Adler, S.; Kyas, M. The Effects of Human Body Shadowing in RF-based Indoor Localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 307–313.
- Pelka, M.; Bollmeyer, C.; Hellbruck, H. Accurate Radio Distance Estimation by Phase Measurements with Multiple Frequencies. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 142–151.
- Torres-Sospedra, J.; Montoliu, R.; Martinez-Uso, A.; Avariento, J.P. UJIIndoorLoc: A New Multi-building and Multi-floor Database for WLAN Fingerprint-based Indoor Localization Problems. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 261–270.
- Zhou, M.; Zhan, Q.; Xu, K.; Tian, Z.; Wang, Y.; He, W. PRIMAL: Page Rank-Based Indoor Mapping and Localization Using Gene-Sequenced Unlabeled WLAN Received Signal Strength. Sensors 2015, 15, 24791–24817. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Xu, Y. Received Signal Strength Recovery in Green WLAN Indoor Positioning System Using Singular Value Thresholding. Sensors 2015, 15, 1292–1311. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Xing, T. Open WSN indoor localization platform design. In Proceedings of the 2nd International Symposium on Instrumentation and Measurement, Sensor Network and Automation, Toronto, ON, Canada, 23–24 December 2013; pp. 845–848.
- Laoudias, C.; Michaelides, M.P.; Panayiotou, C. Fault Tolerant Target Localization and Tracking in Binary WSNs using Sensor Health State Estimation. In Proceedings of International Conference on Communications, Budapest, Hungary, 9–13 June 2013; pp. 1469–1473.
- Pak, J.M.; Ahn, C.K.; Shmaliy, Y.S.; Lim, M.T. Improving Reliability of Particle Filter-Based Localization in Wireless Sensor Networks via Hybrid Particle/FIR Filtering. IEEE Trans. Ind. Inform. 2015, 11, 1089–1098. [Google Scholar] [CrossRef]
- Lim, H.; Sudipta, S.N.; Cohen, M.F.; Uyttendaele, M.; Kim, H.J. Real-time monocular image-based 6-DoF localization. Int. J. Robot. Res. 2015, 34, 476–492. [Google Scholar] [CrossRef]
- Ifthekhar, M.S.; Saha, N.; Jang, Y.M. Neural Network Based Indoor Positioning Technique in Optical Camera Communication System. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 431–435.
- Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Three-Dimensional Visible Light Indoor Localization Using AOA and RSS with Multiple Optical Receivers. J. Lightwave Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Taniuchi, D.; Liu, X.; Nakai, D.; Maekawa, T. Spring Model Based Collaborative Indoor Position Estimation with Neighbor Mobile Devices. IEEE J. Sel. Top. Signal Process. 2015, 9, 268–277. [Google Scholar] [CrossRef]
- Chang, Q.; Hou, H.T.; Zeng, X.H.; Li, Q.; Wang, W.P. A Survey of GNSS based Cooperative Positioning. J. Astronaut. 2014, 35, 13–20. [Google Scholar]
- Zhao, Y.; Liu, K.H.; Ma, Y.T.; Li, Z. An improved k-NN algorithm for localization in multipath environments. J. Wirel. Commun. Netw. 2014, 1, 1–10. [Google Scholar]
- Chang, Q.; Velde, S.V.D.; Wang, W.; Li, Q.; Hou, H.T. Wi-Fi fingerprint positioning updated by pedestrian dead reckoning for mobile phone indoor localization. In China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume III; Springer: Berlin, Germany, 2015. [Google Scholar]
- Wang, D.; Zhou, Y.; Wei, Y. A Bayesian Compressed Sensing Approach to Robust Object Localization in Wireless Sensor Networks. In Proceedings of the International Conference on Mobile Services, Anchorage, AK, USA, 27 June–2 July 2014; pp. 24–30.
- Hejc, G.; Seitz, J.; Vaupel, T. Bayesian Sensor Fusion of Wi-Fi Signal Strengths and GNSS Code and Carrier Phases for Positioning in Urban Environments. In Proceedings of the International Conference on Position Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 1026–1032.
- Soltani, M.M.; Motamedi, A.; Hammad, A. Enhancing Cluster-based RFID Tag Localization Using Artificial Neural Networks and Virtual Reference Tags. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 93–105.
- Chiang, K.W.; Liao, J.K.; Tsai, G.J.; Chang, H.W. The Performance Analysis of the Map-Aided Fuzzy Decision Tree Based on the Pedestrian Dead Reckoning Algorithm in an Indoor Environment. Sensors 2016, 16, 34. [Google Scholar]
- Niu, J.; Ramana, K.V.; Wang, B.; Rodrigued, J.J.P.C. A Robust Method for Indoor Localization using WiFi and Surf based on image fingerprint registration. Ad-HOC Mob. Wirel. Netw. 2014, 8487, 346–359. [Google Scholar]
- Werner, M.; Kessel, M.; Marouane, C. Indoor Positioning Using Smartphone Camera. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Guimarães, Portugal, 21–23 September 2011; pp. 1–6.
- Marouane, C.; Maier, M.; Feld, S.; Werner, M. Visual Positioning Systems—An Extension to MoVIPS. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 95–104.
- Levchev, P.; Krishnan, M.N.; Yu, C.; Menke, J. Simultaneous Fingerprinting and Mapping for Multimodal Image and WiFi Indoor Positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 442–450.
- Gu, Y.; Anthony, L.; Niemegeers, I. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Seybold, J.S. Introduction to RF Propagation; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Zou, H.; Wang, H.; Xie, L.; Jia, Q.S. An RFID indoor positioning system by using weighted path loss and extreme learning machine. In Proceedings of the International Conference on Cyber-Physical Systems, Networks, and Applications, Taipei, Taiwan, 19–20 August 2013; pp. 66–71.
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, Smartphone Sensors and Landmarks Using the Kalman Filter for Indoor Localization. Sensors 2015, 15, 715–732. [Google Scholar] [PubMed]
- Fidan, B.; Uamy, I. Adaptive Environmental Source Localization and Tracking with Unknown Permittivity and Path Loss Coefficients. Sensors 2015, 15, 31125–31141. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Chen, Y.; Li, X.Y.; Xiao, C.; Li, M.; Liu, Y.H. Tagoram: Real-Time Tracking of Mobile RFID Tags to High Precision Using COTS Devices. In Proceedings of the Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 237–248.
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. In Proceedings of the Annual Conference of the Special Interest Group on Data Communication, London, UK, 7–21 August 2015; pp. 269–282.
- Schussel, M.; Pregizer, F. Coverage Gaps in Fingerprinting Based Indoor Positioning: The Use of Hybrid Gaussian Processes. In Proceedings of the International Conference on Indoor Positioning & Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–9.
- Li, L.; Shen, G.; Zhao, C.; Moscibroda, T.; Lin, J.H.; Zhao, F. Experiencing and Handling the Diversity in Data Density and Environmental Locality in an Indoor Positioning Service. In Proceedings of International Conference on Mobile Computing & Networking, Maui, HI, USA, 7–11 September 2014; pp. 459–470.
- Liu, C.; Wang, J. A Constrained KNN Indoor Positioning Model Based on a Geometric Clustering Fingerprinting Technique. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 1287–1292. [Google Scholar]
- Saha, A.; Sadhukhan, P. A Novel Clustering Strategy for Fingerprinting based Localization System to Reduce the Searching Time. In Proceedings of the 2nd International Conference on Recent Trends in Information Systems, Kolkata, India, 9–11 July 2015; pp. 538–543.
- Lee, C.W.; Lin, T.N.; Fang, S.H.; Chou, Y.C. A Novel Clustering-Based Approach of Indoor Location Fingerprinting. In Proceedings of the 24th International Symposium on Personal, Indoor and Mobile Radio Communications: Mobile and Wireless Networks, London, UK, 8–11 September 2013; pp. 3191–3196.
- Philipp, D.; Baier, P.; Dibak, C.; Durr, F.; Rothermel, K.; Becker, S.; Peter, M.; Fritsch, D. MapGENIE: Grammar-enhanced Indoor Map Construction from crowd-sourcing Data. In Proceedings of the 12th International Conference on Pervasive Computing and Communication, Budapest, Spain, 24–28 March 2014; pp. 139–147.
- Zhou, M.; Wong, K.S.; Tian, Z.; Luo, X. Personal Mobility Map Construction for crowd-sourcing Wi-Fi Based Indoor Mapping. IEEE Commun. Lett. 2014, 18, 1427–1430. [Google Scholar]
- Keller, F.; Willemsen, T.; Sternberg, H. Calibration of smartphones for the use in indoor navigation. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, NSW, Australia, 13–15 November 2012; pp. 1–8.
- Galván-Tejada, C.E.; García-Vázquez, J.P.; Galvan-Tejada, J.I.; Delgado-Contreras, J.R.; Brena, R.F. Infrastructure-Less Indoor Localization Using the Microphone, Magnetometer and Light Sensor of a Smartphone. Sensors 2015, 15, 20355–20372. [Google Scholar] [PubMed]
- Shin, H.; Chon, Y.; Cha, H. Unsupervised Construction of Indoor Floor Plan Using Smartphone. IEEE Trans. Syst. Man Cybern. Part C. 2012, 42, 889–898. [Google Scholar] [CrossRef]
- Song, J.; Hur, S.; Park, Y. Fingerprint-Based User Positioning Method Using Image Data of Single Camera. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015.
- Kawaji, H.; Hatada, K.; Yamasaki, T.; Aizawa, K. Image-based Indoor Positioning System: Fast Image Matching using Omnidirectional Panoramic Images. In Proceedings of the ACM Workshop on Multimodal Pervasive Video Analysis, Florence, Italy, 29 October 2010; pp. 1–4.
- Luo, J.; Oubong, G. A Comparison of SIFT, PCA-SIFT and SURF. Int. J. Image Process. 2009, 3, 143–151. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Estellés-Arolas, E. Towards an Integrated Crowd-sourcing Definition. J. Inf. Sci. 2012, 38, 189–200. [Google Scholar] [CrossRef]
- Vukovic, M.; Lopez, M.; Laredo, J. Peoplecloud for the Globally Integrated Enterprise. In Proceedings of the International Conference on Service Oriented Computing, San Francisco, CA, USA, 7–10 December 2010; pp. 109–114.
- Qian, S.; Zhu, J. Improved SIFT-based Bidirectional Image Matching Algorithm. Mech. Sci. Technol. Aerosp. Eng. 2007, 26, 1179–1182. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinate | AP Number | AP1 | AP2 | ... | APm | Image | Orientation Sensor Data |
|---|---|---|---|---|---|---|---|
| (x1,y1) | m1 | MACm1 = RSSIm1 | MACm1 = RSSIm1 | ... | MACm1 = RSSIm1 | 1 | {θx1,θy1,θz1} |
| (x2,y2) | m2 | MACm2 = RSSIm2 | MACm2 = RSSIm2 | ... | MACm2 = RSSIm2 | 2 | {θx2,θy2,θz2} |
| (x3,y3) | m3 | MACm3 = RSSIm3 | MACm3 = RSSIm3 | ... | MACm3 = RSSIm3 | 3 | {θx3,θy3,θz3} |
| (xn,yn) | mn | MACmn = RSSImn | MACmn = RSSImn | ... | MACmn = RSSImn | n | {θxn,θyn,θzn} |
| Name | Supplier | Resolution | Heading | Pitch | Roll | |||
|---|---|---|---|---|---|---|---|---|
| Range | Accuracy | Range | Accuracy | Range | Accuracy | |||
| Inemo | STmicroelectronics | 0.01° | 0~360° | 0.1° | −90°~+90° | 0.1° | −180°~+180° | 0.1° |
| Type | Orientation | Focal Length | View Angle | Size |
|---|---|---|---|---|
| BSI CMOS | 90° | 3.79 mm | 63° | 1920 × 1080 |
| index | F(DB,i) | Fc | ηi | ζi |
|---|---|---|---|---|
| (a) (b) (c) | 659 643 628 | 647 563 489 | 1.888 1.664 1.464 | 0.853 0.128 0.018 |
| Method | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| KWNN-based/ms | 18.33 | 16.14 | 22.57 | 25.44 | 28.16 | 27.29 | 28.19 | 24.18 |
| SURF + Wi-Fi/ms | 1834.23 | 1898.58 | 1833.12 | 1777.30 | 1747.72 | 1716.91 | 1747.72 | 1908.65 |
| Proposed/ms | 1739.45 | 1734.18 | 1731.09 | 1699.88 | 1702.02 | 1691.47 | 1688.45 | 1743.09 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Wang, W.; Li, Q.; Chang, Q.; Hou, H. A Crowd-Sourcing Indoor Localization Algorithm via Optical Camera on a Smartphone Assisted by Wi-Fi Fingerprint RSSI. Sensors 2016, 16, 410. https://0-doi-org.brum.beds.ac.uk/10.3390/s16030410
Chen W, Wang W, Li Q, Chang Q, Hou H. A Crowd-Sourcing Indoor Localization Algorithm via Optical Camera on a Smartphone Assisted by Wi-Fi Fingerprint RSSI. Sensors. 2016; 16(3):410. https://0-doi-org.brum.beds.ac.uk/10.3390/s16030410
Chicago/Turabian StyleChen, Wei, Weiping Wang, Qun Li, Qiang Chang, and Hongtao Hou. 2016. "A Crowd-Sourcing Indoor Localization Algorithm via Optical Camera on a Smartphone Assisted by Wi-Fi Fingerprint RSSI" Sensors 16, no. 3: 410. https://0-doi-org.brum.beds.ac.uk/10.3390/s16030410