
Development of Conductivity Sensors for Multi-Phase Flow Local Measurements at the Polytechnic University of Valencia (UPV) and University Jaume I of Castellon (UJI)

 , , and
, , and
Abstract
:1. Introduction
2. Measurement of the Void Fraction, the Interfacial Area Concentration and the Velocity Using Two and Four Tip Conductivity Probes
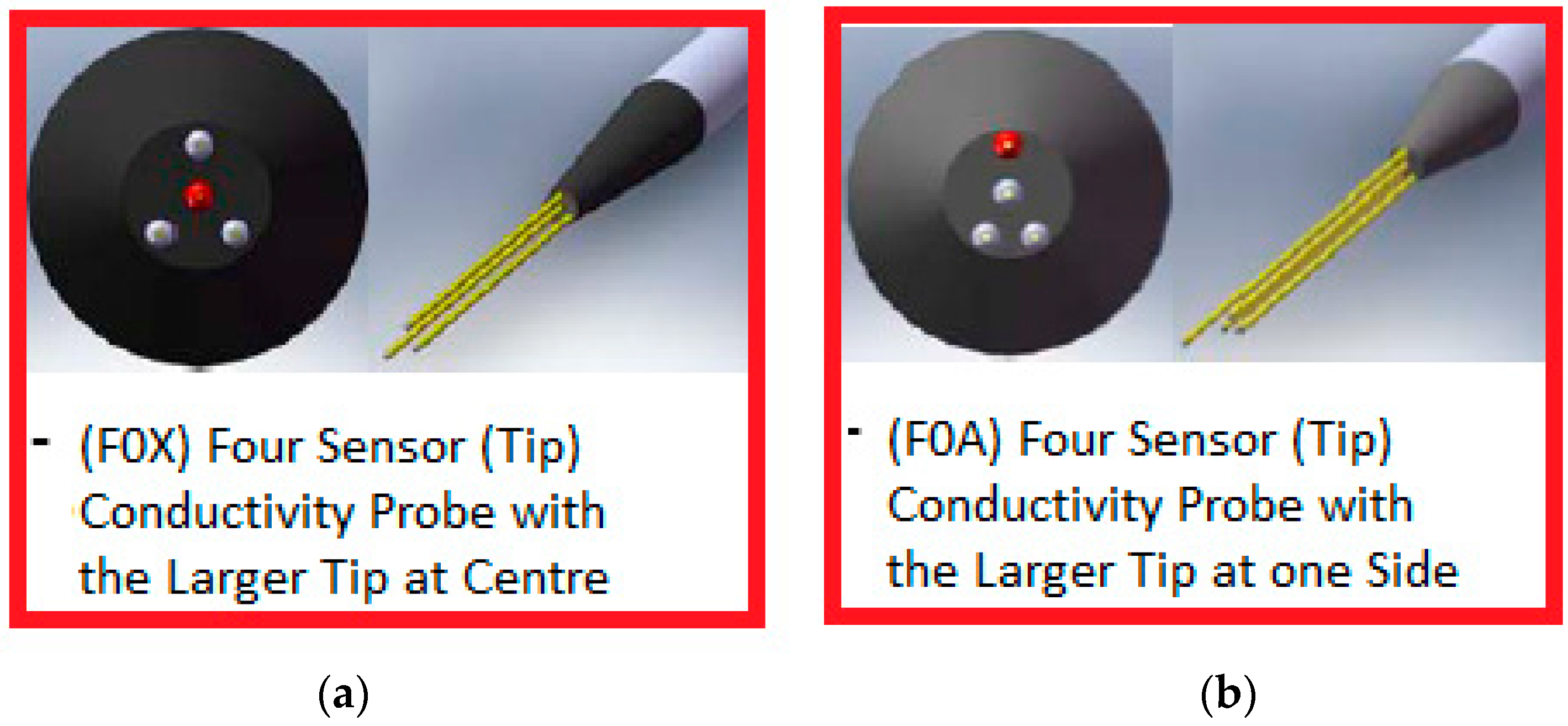
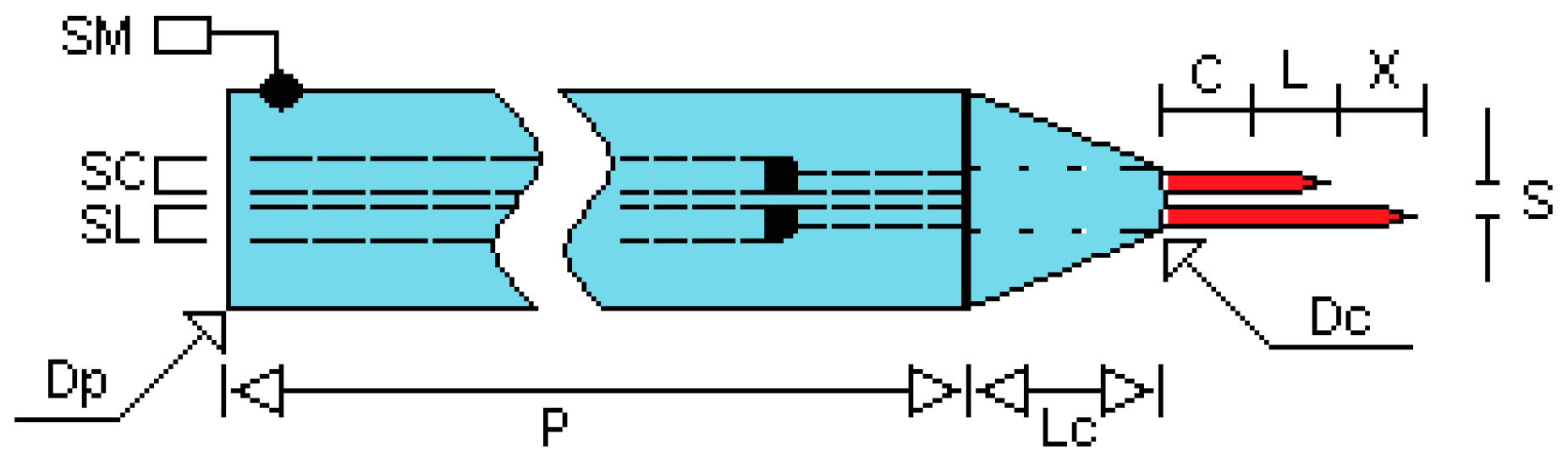
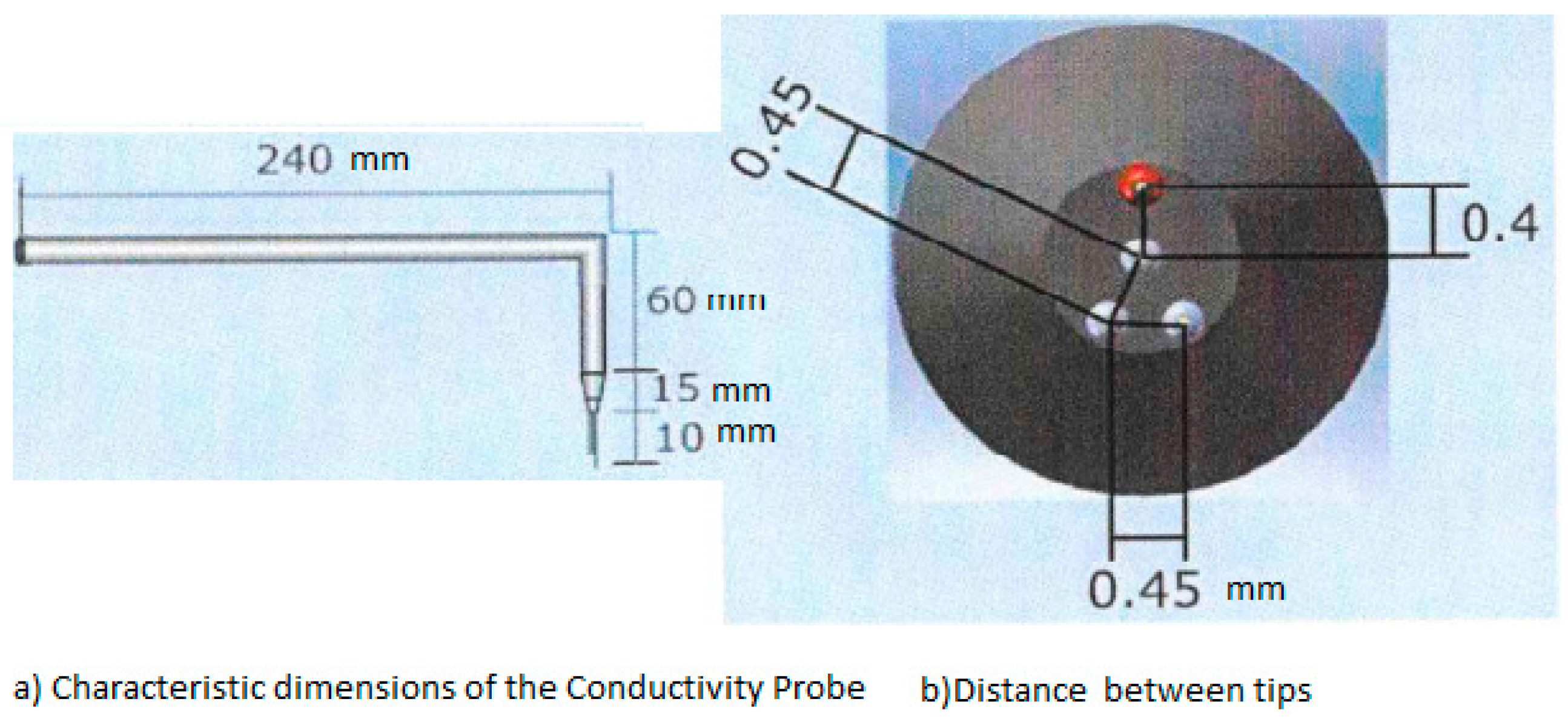
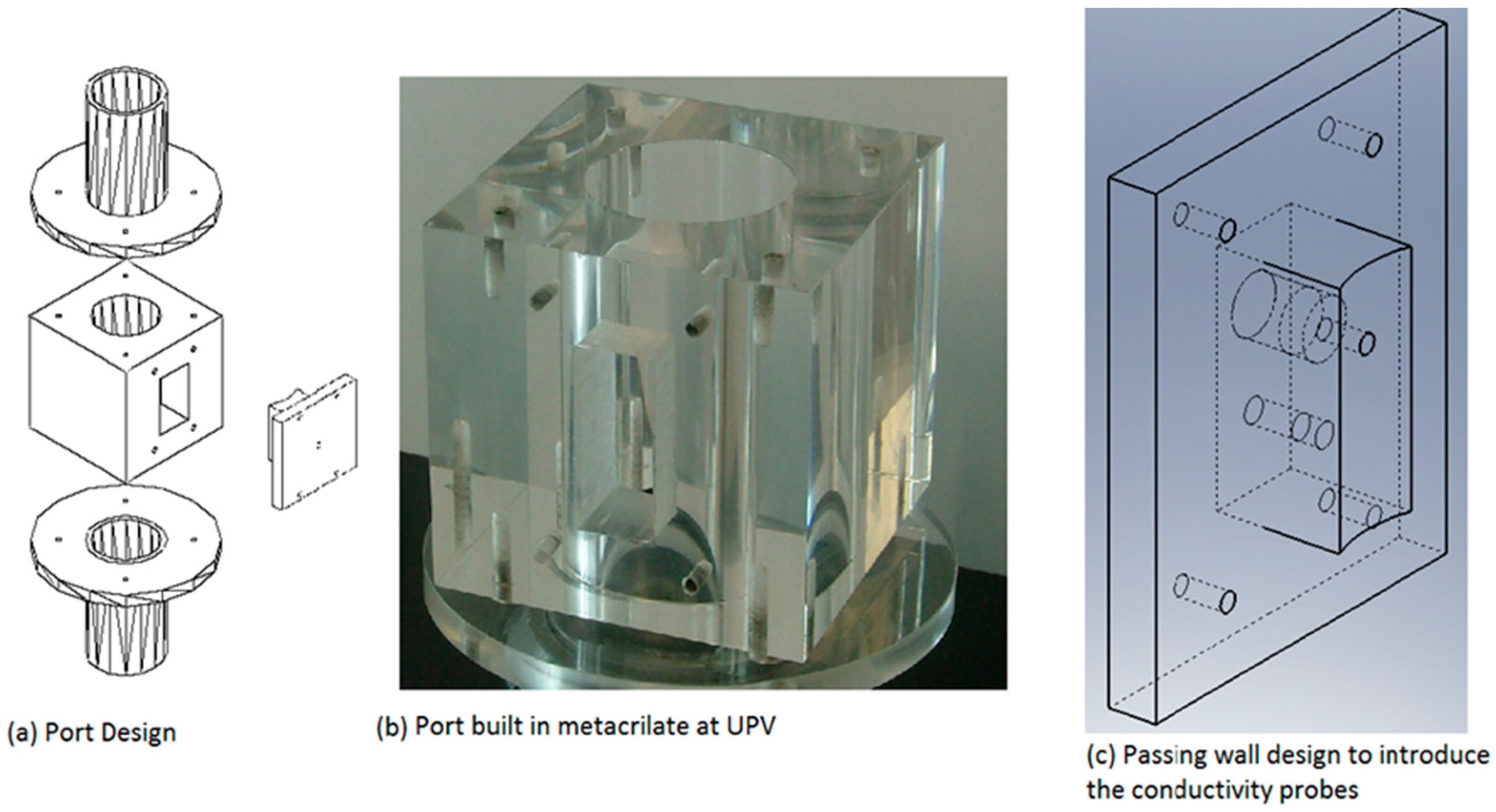
2.1. Building of the Conductivity Probes
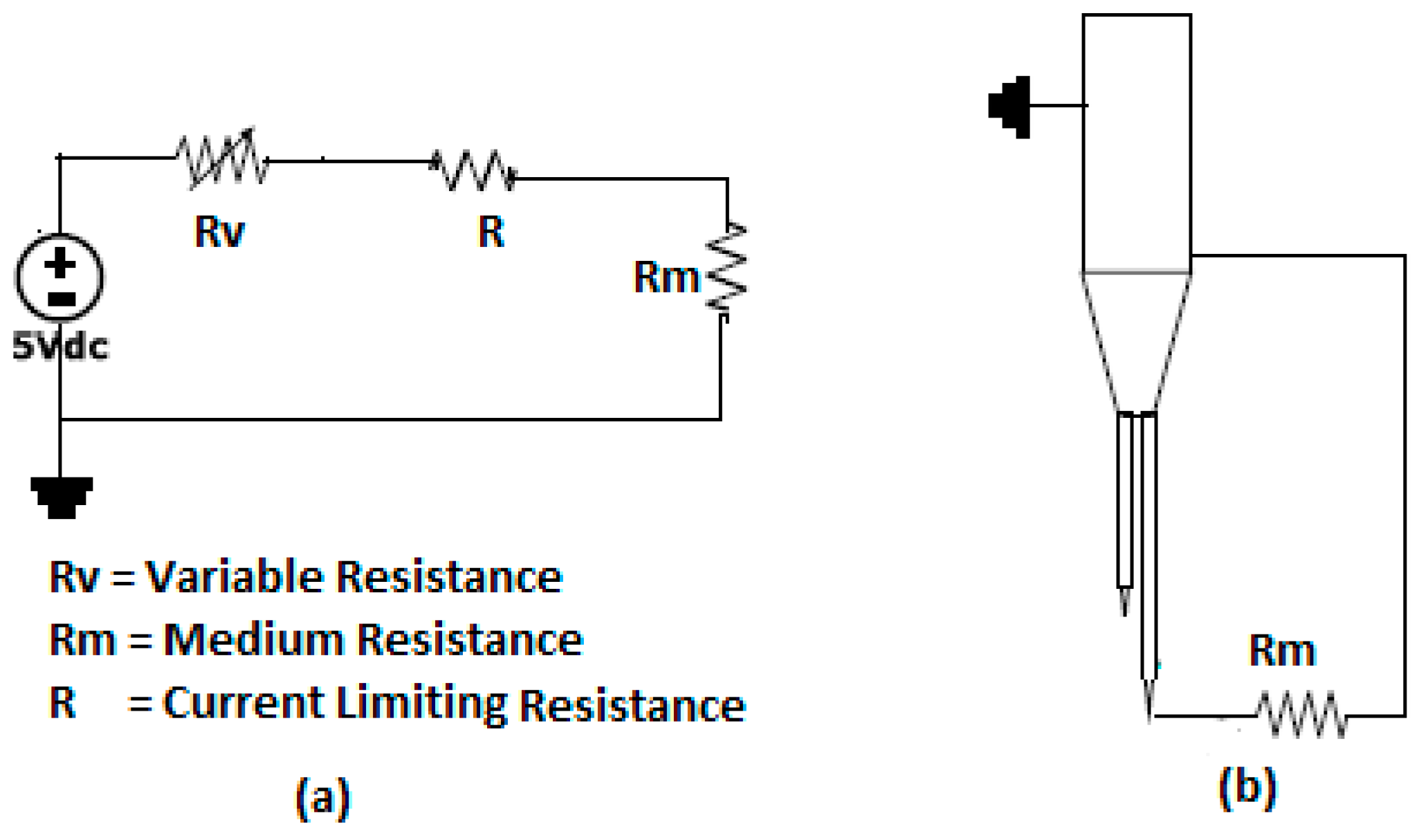
2.2. Electric Circuit of the Conductivity Probe
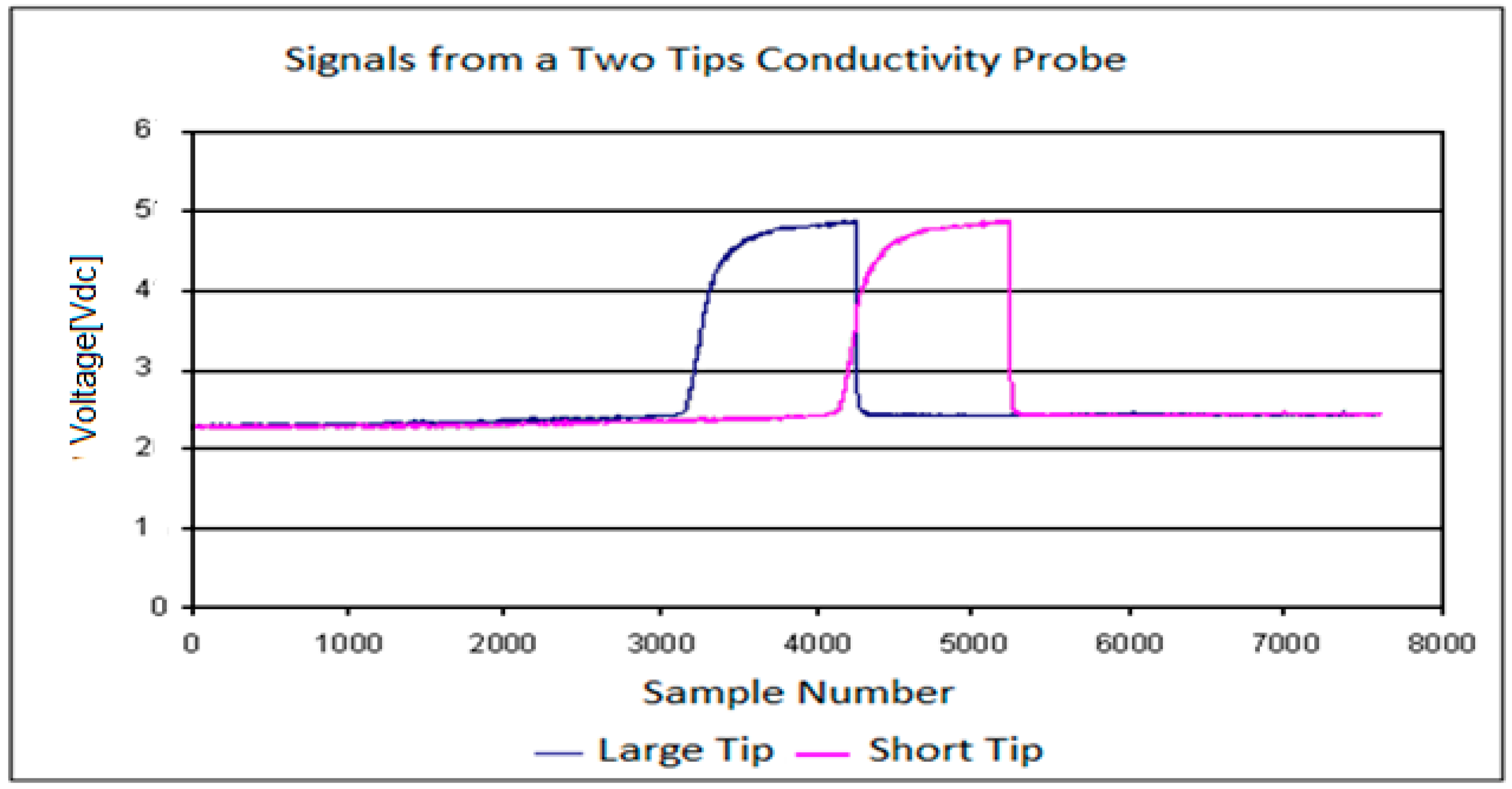
2.3. Operation and Data Acquisition of the Conductivity Probe
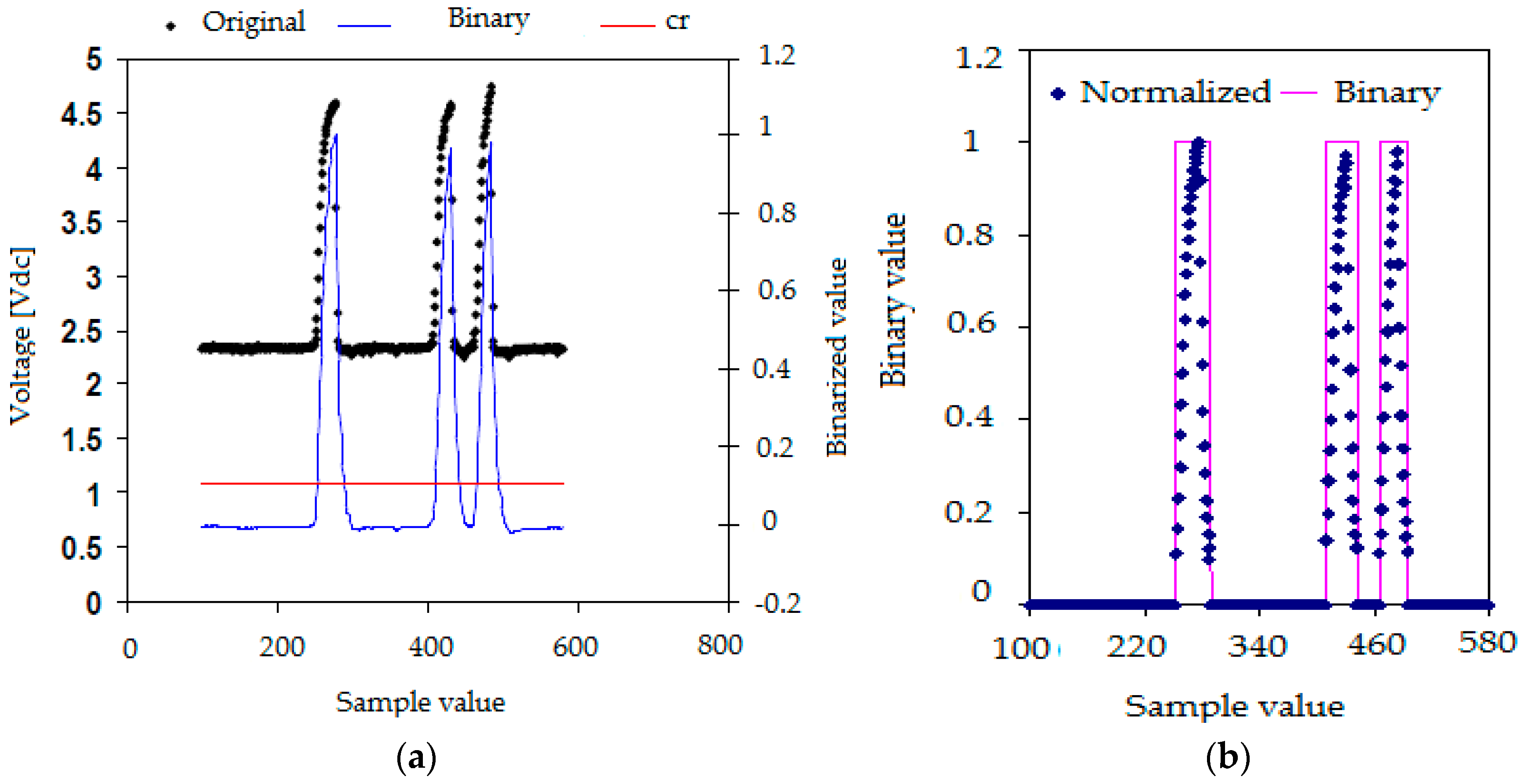
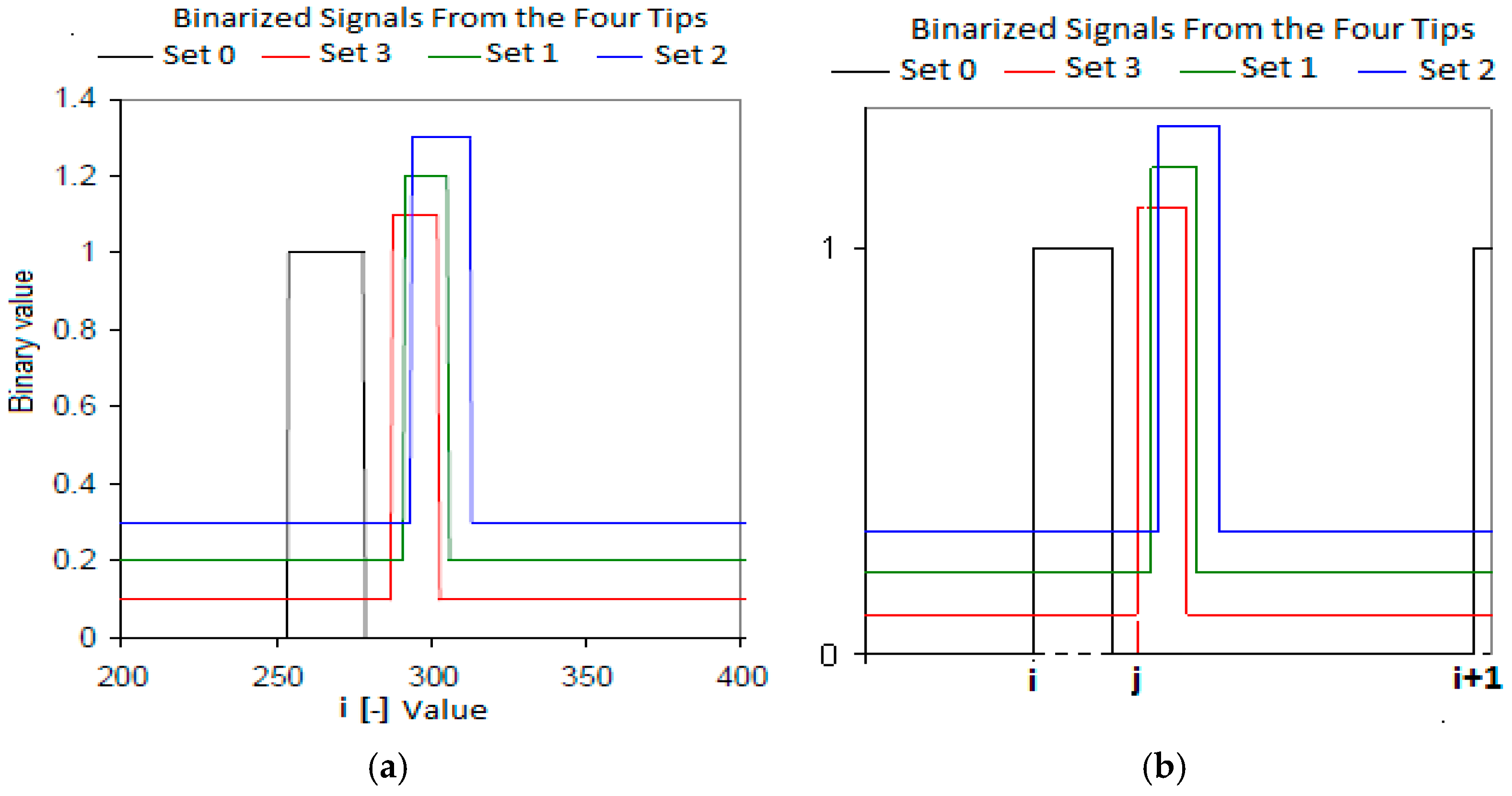
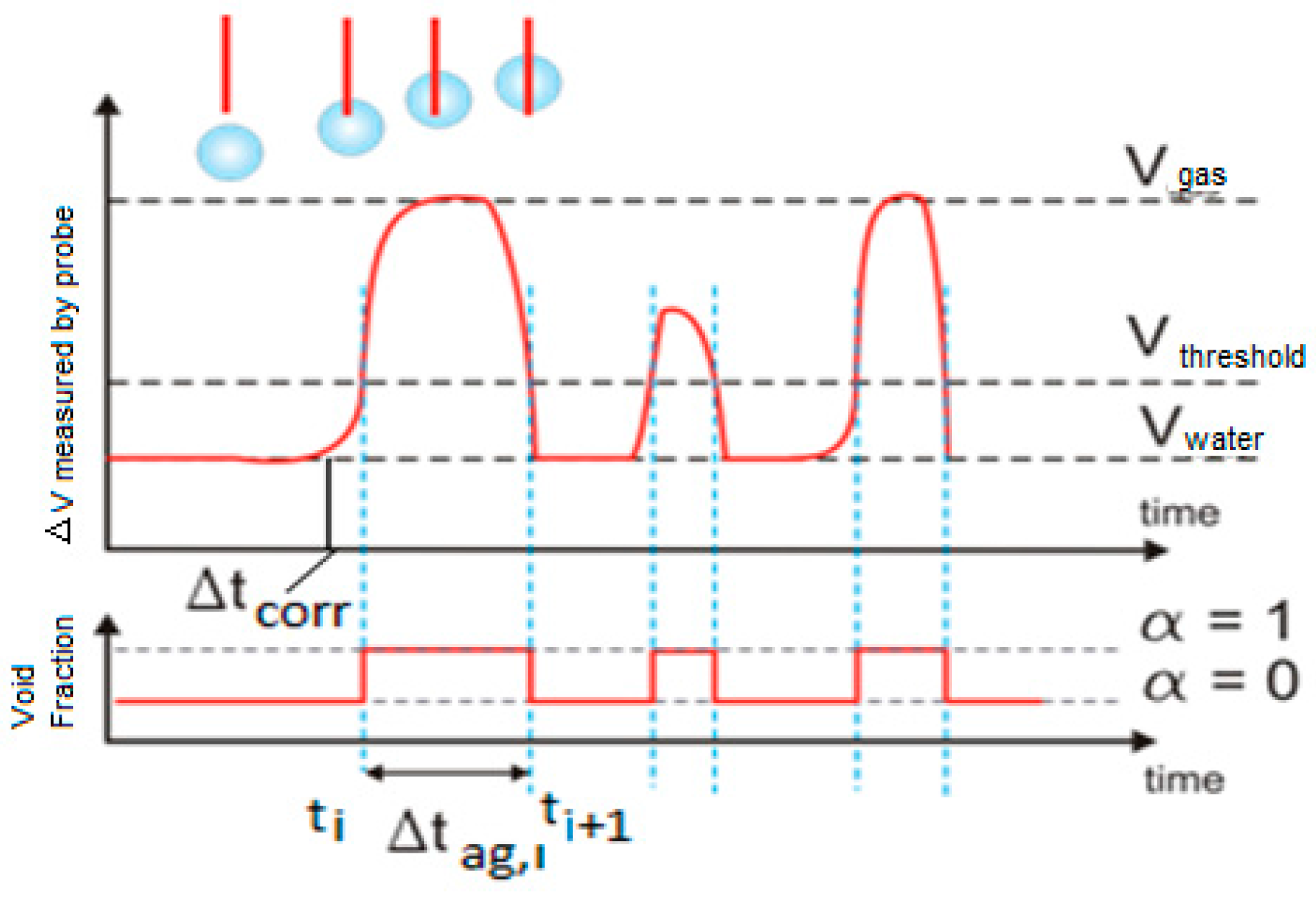
2.4. Filtering, Conditioning and Binarization of the Signals
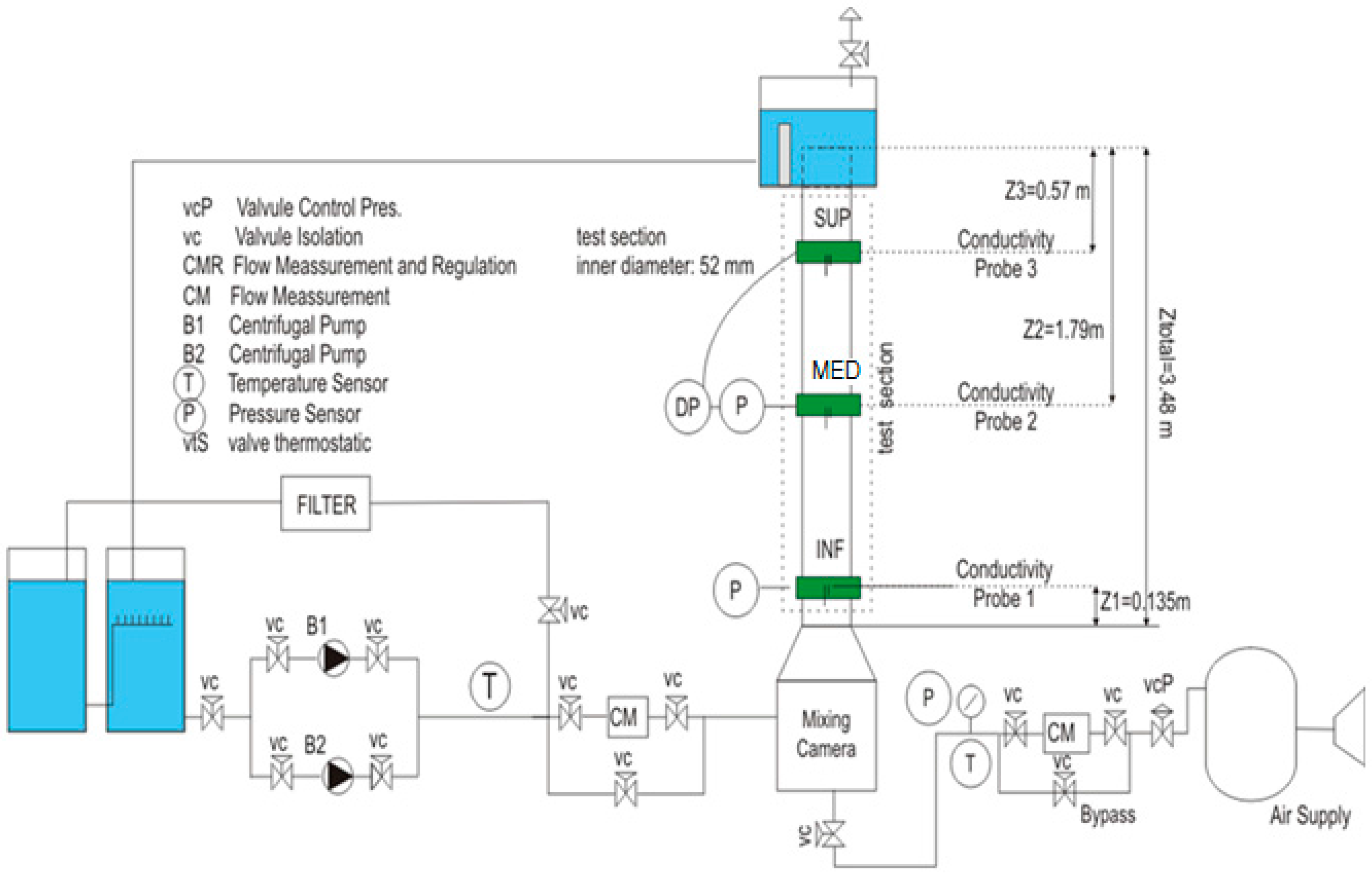
2.5. Experimental Facility
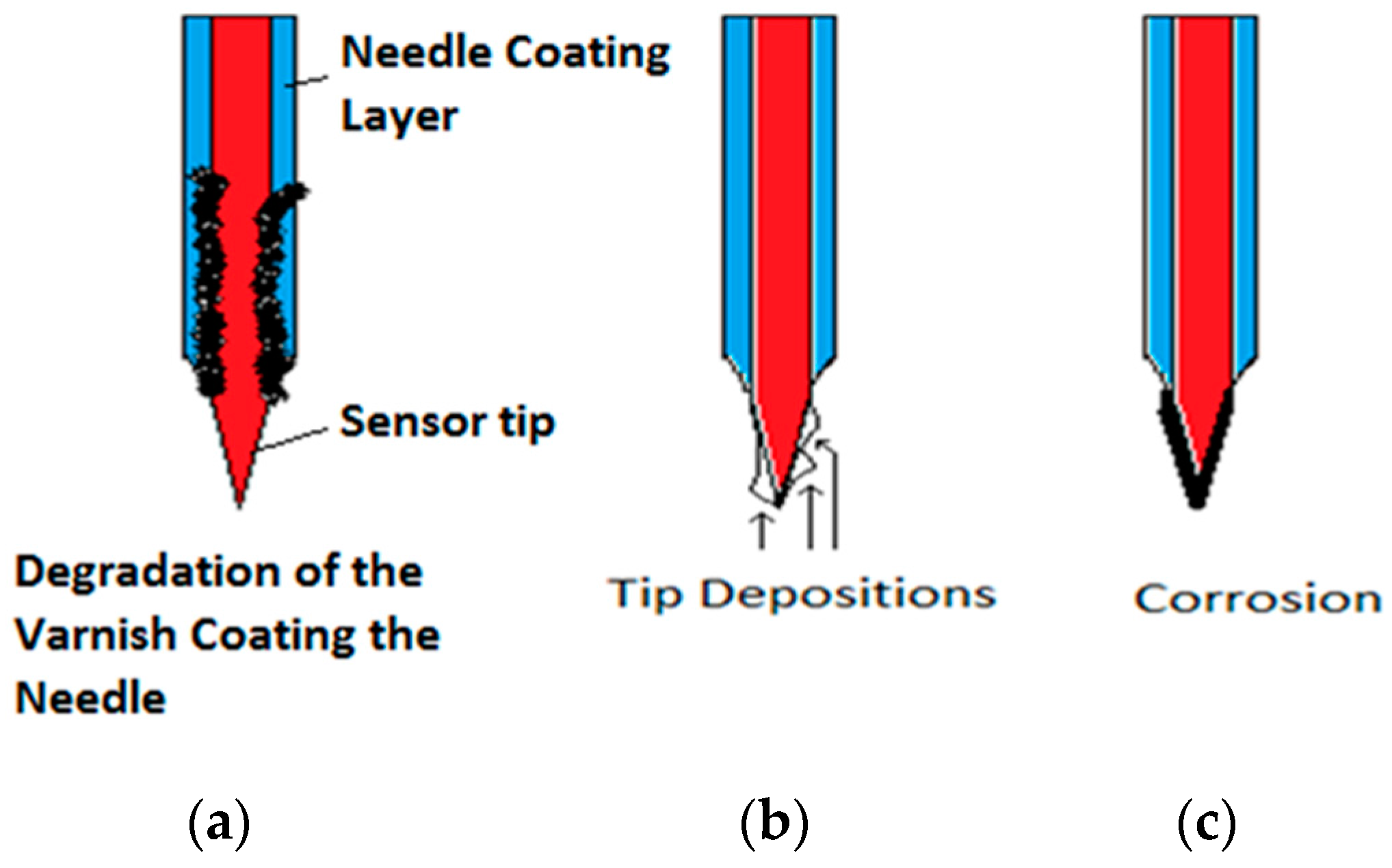
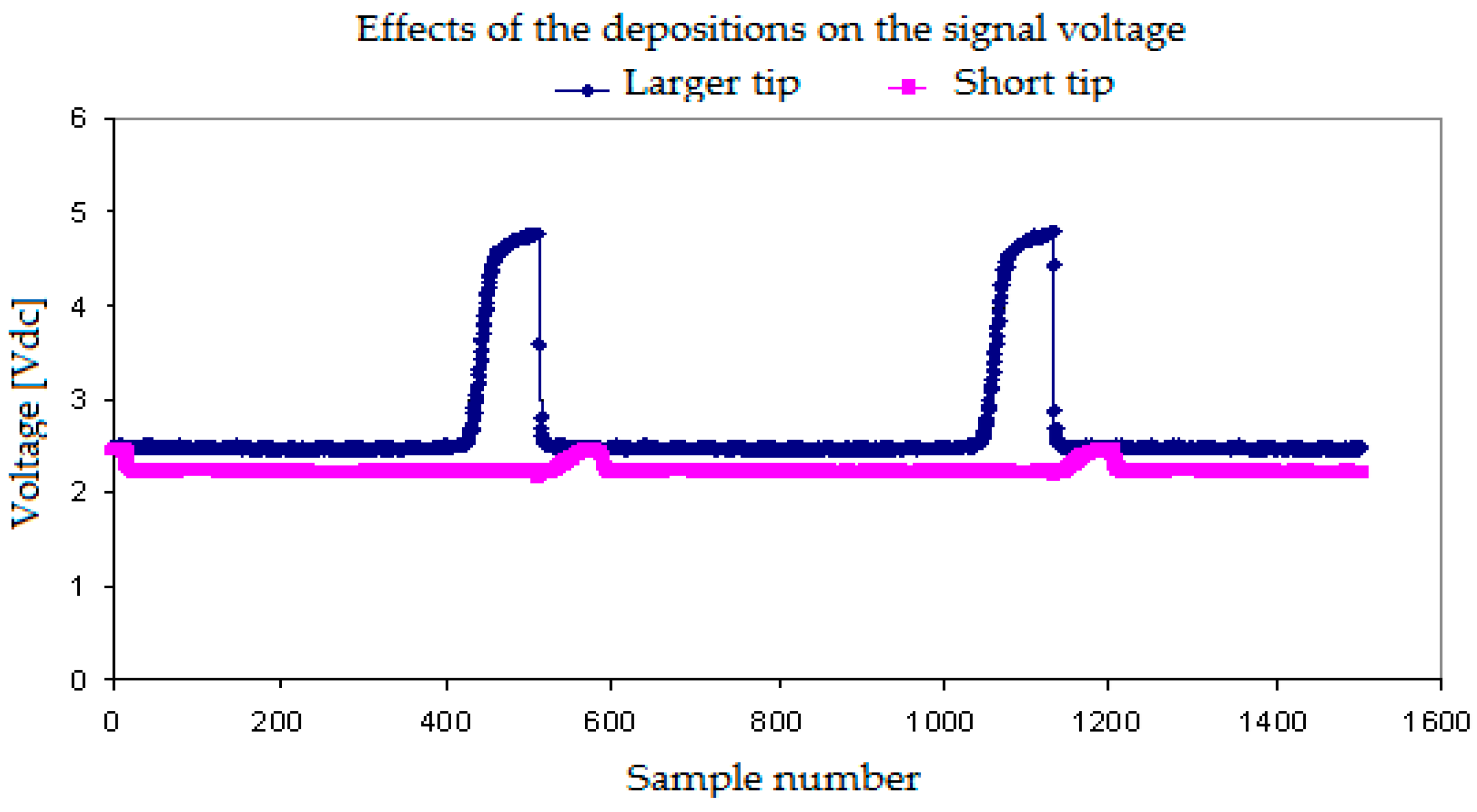
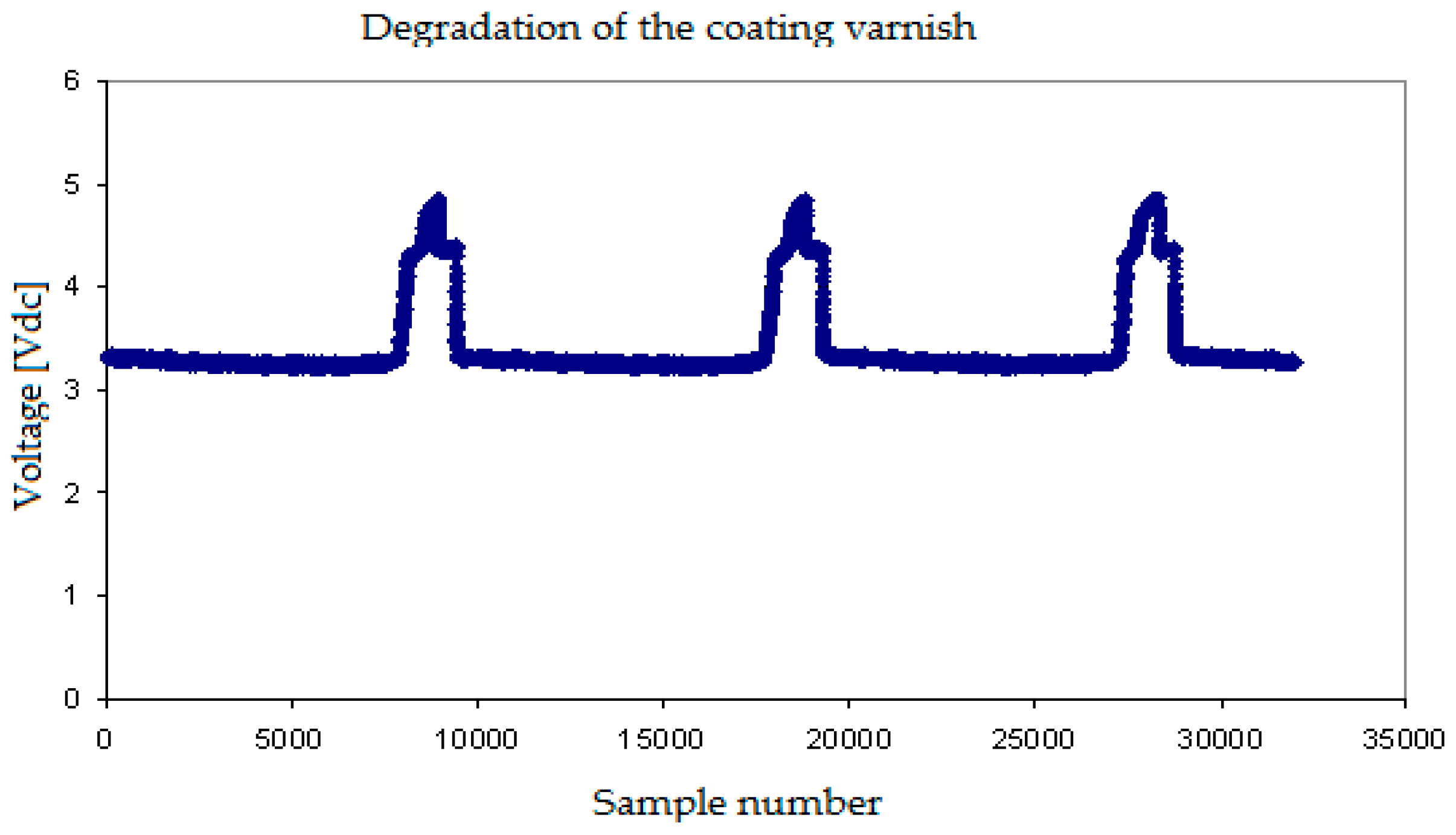
2.6. Corrosion and Degradation of the Conductivity Probes
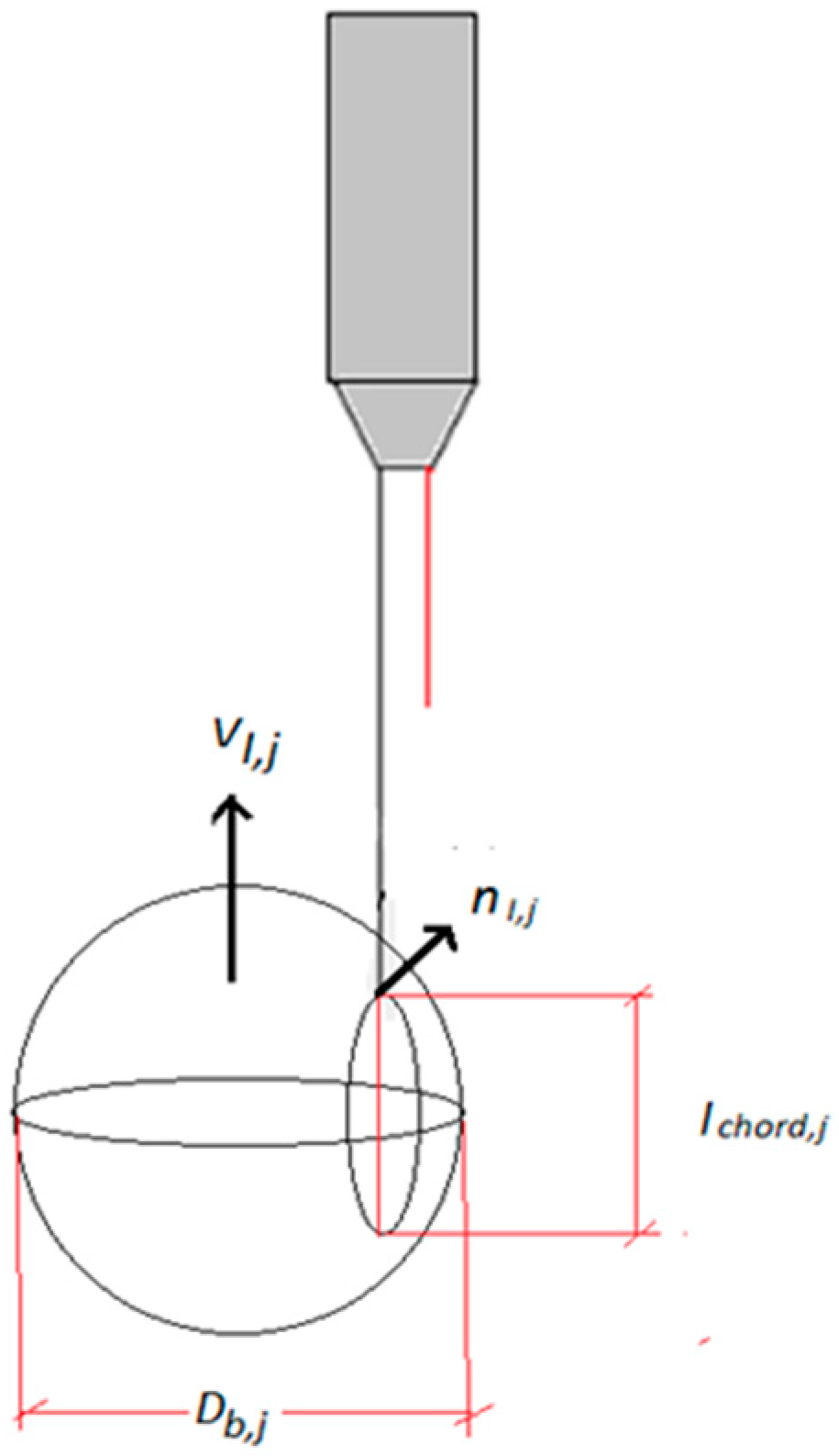
2.7. Bubble’s Identification with the Four and Two Sensors (Tips) Conductivity Probe
2.8. Bubble Categorization
- Spherical bubbles if the chord length belongs to [0,
- Distorted spherical bubble if belongs to [, ]
- Caps bubbles if belongs to [, ]
- Slugs if
3. Obtaining the Flow Magnitudes from the Sensor Signals
3.1. The Multi-Sensor Conductivity Probe as a Phase Identifier
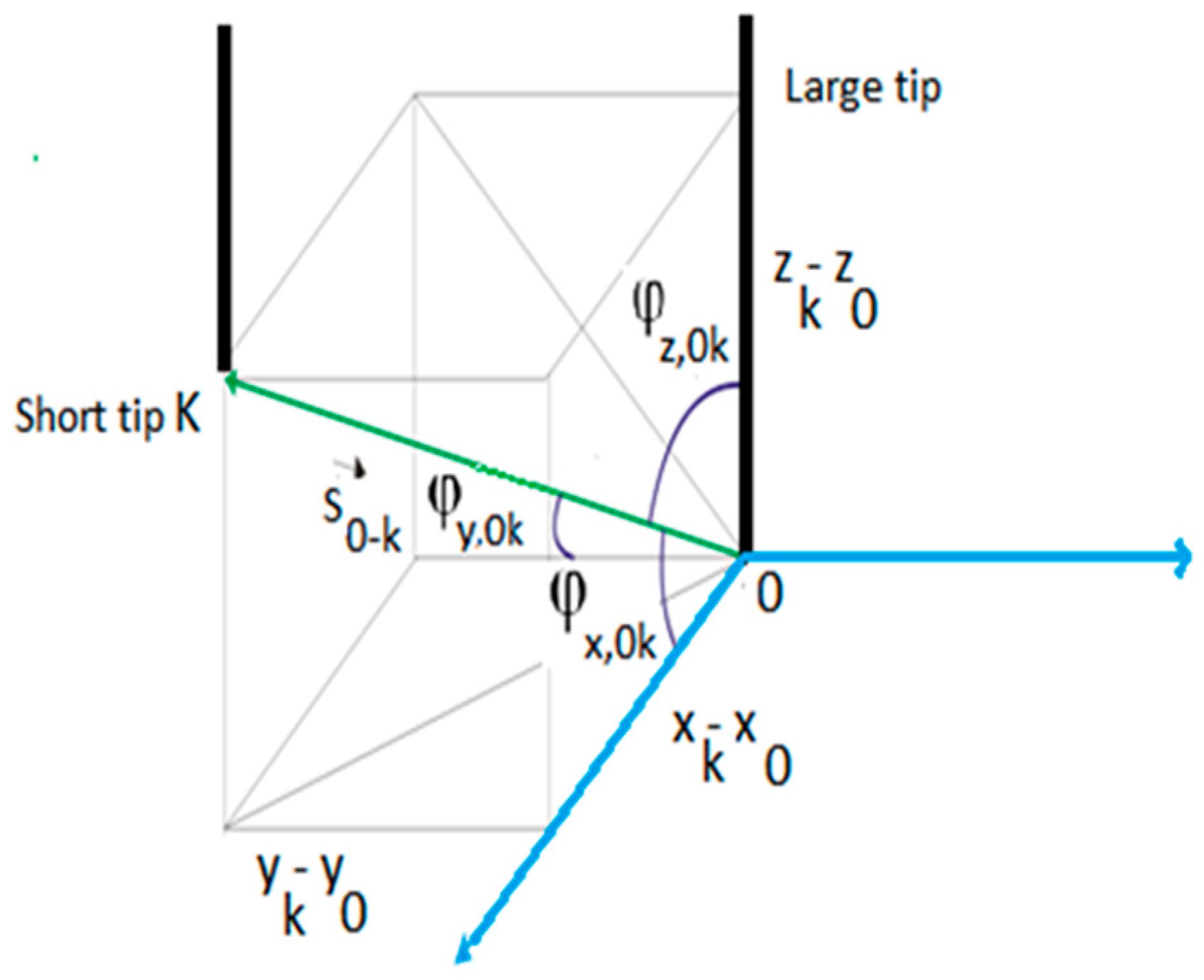
3.2. Obtaining the Gas Velocity from the Signals Provided by the Sensors (Tips)
3.3. Calibration Factors for the Bubble Velocity
3.4. Roots of the Method to Measure the Interfacial Area Concentration by Means of Multi-Sensor-Conductivity Probe
3.5. Obtaining the Interfacial Area Concentration from the Signals Provided by the Multi-Sensor Conductivity Probe
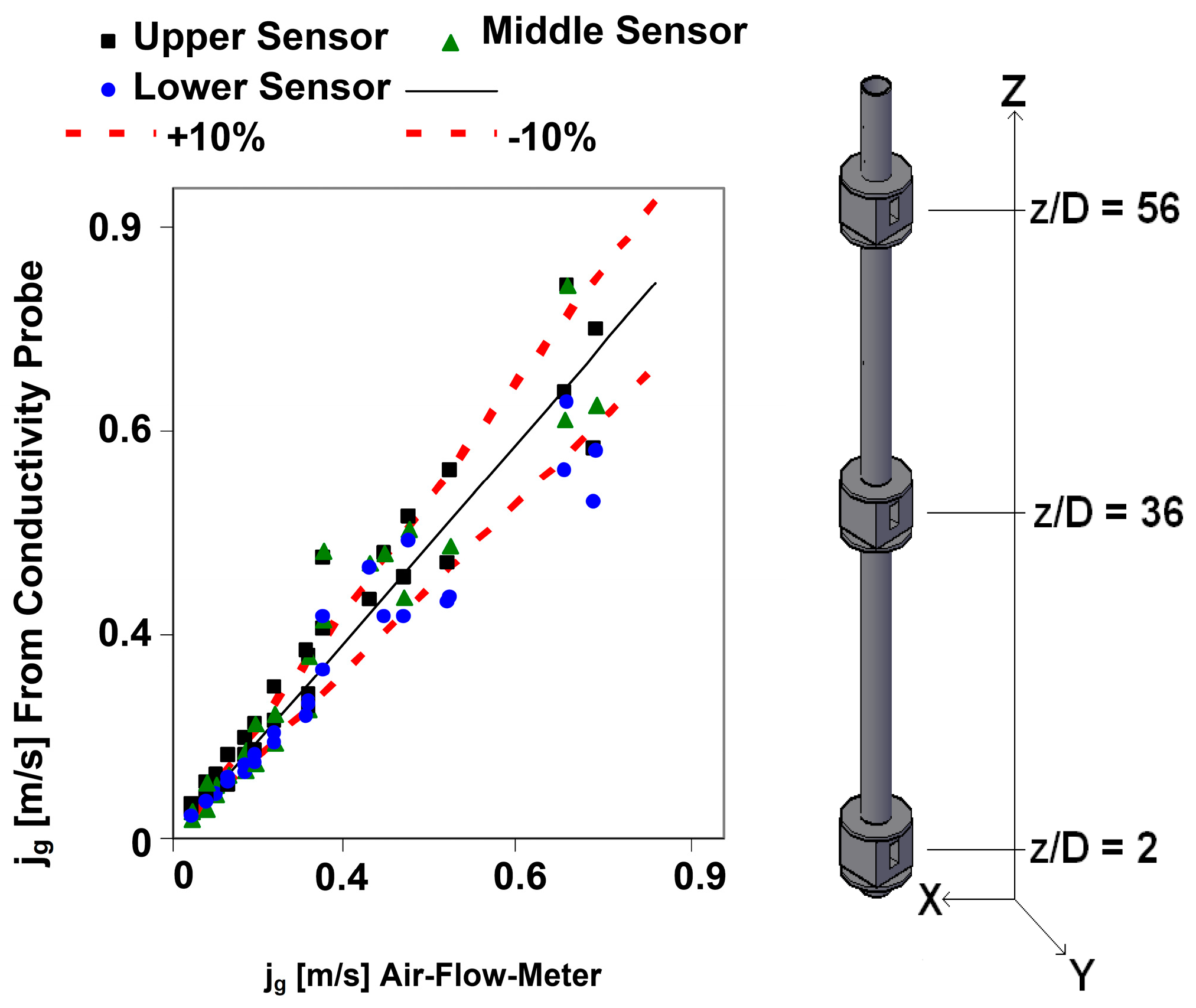
3.6. Measurement of the Liquid and Gas Superficial Velocities
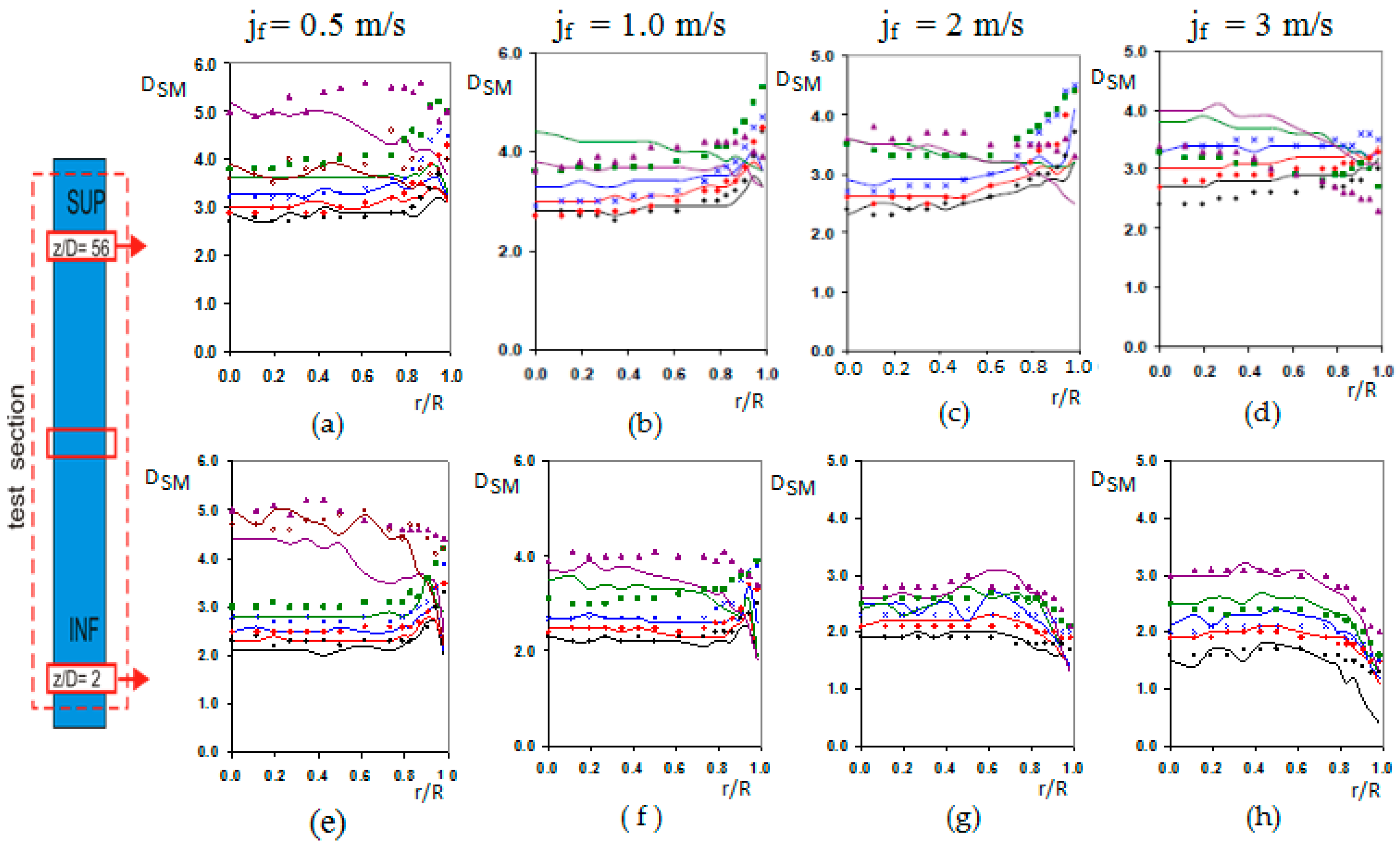
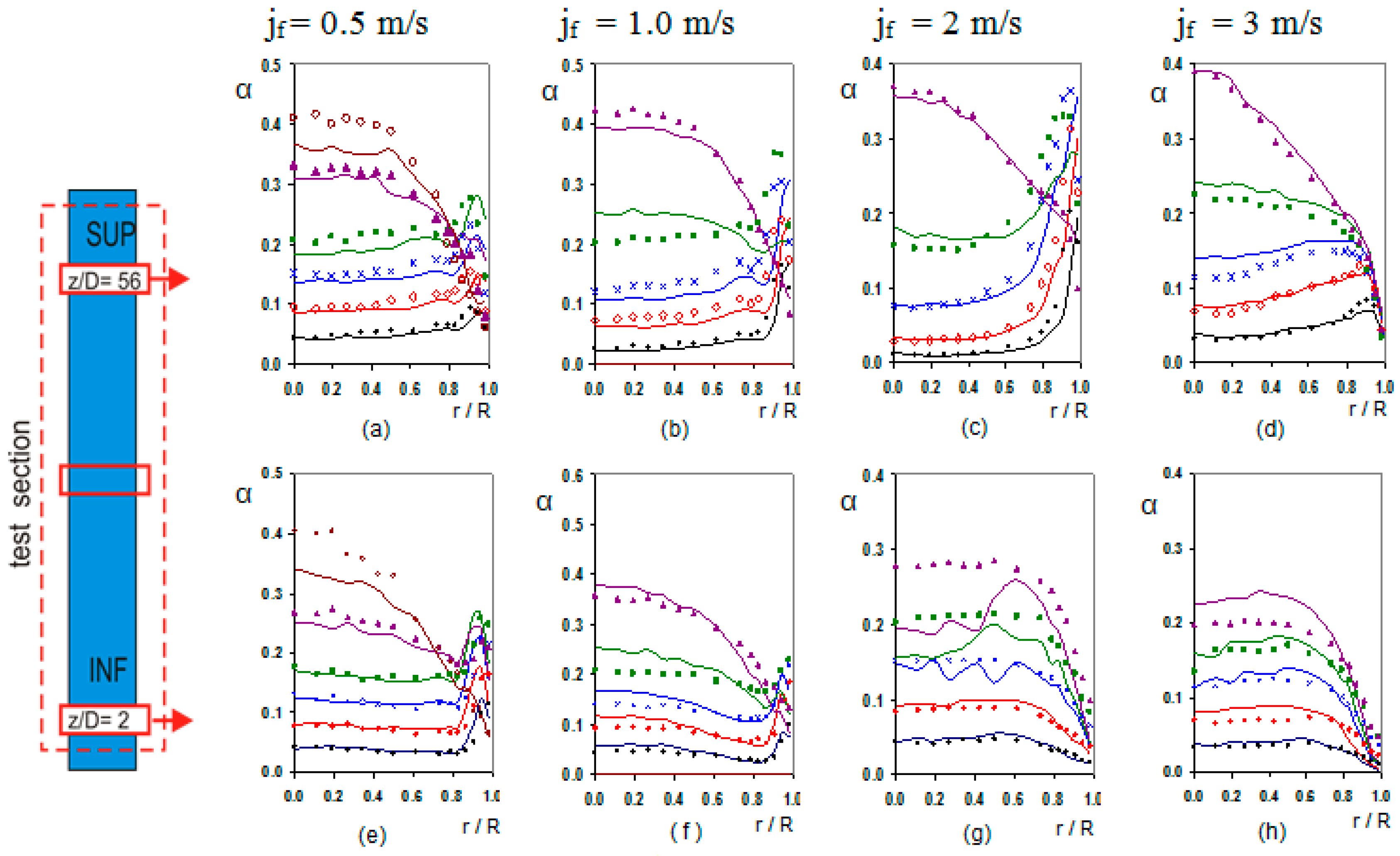
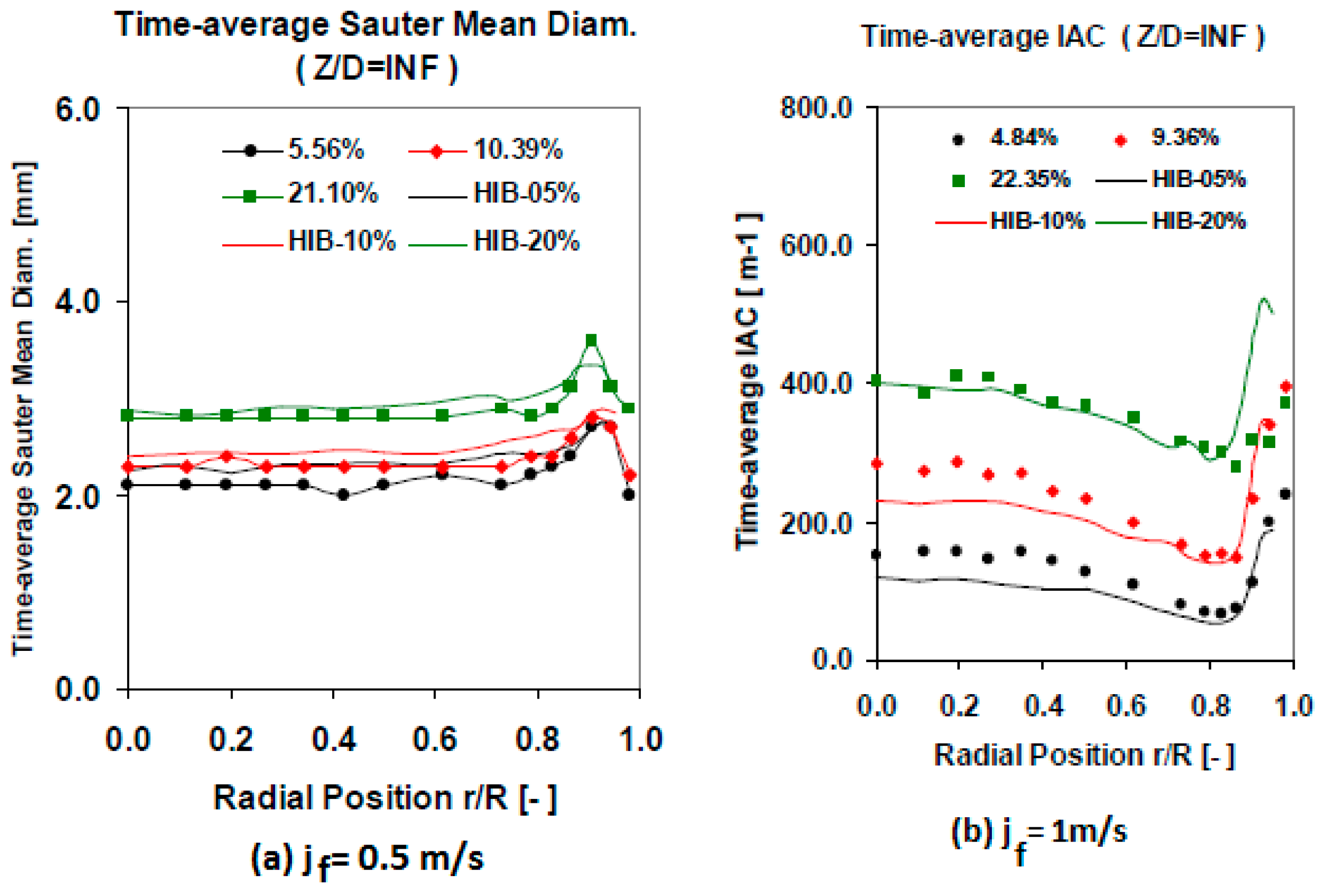
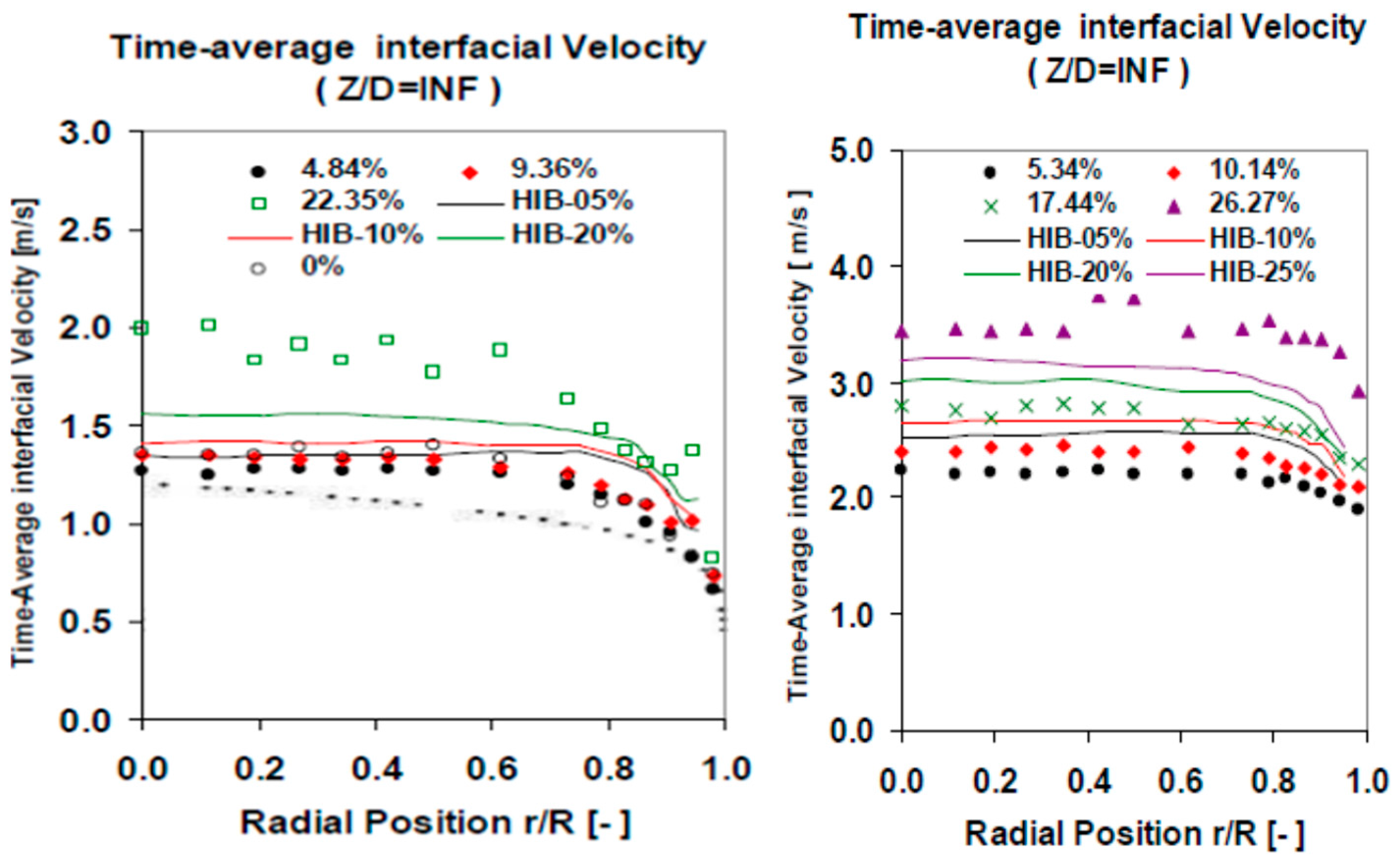
3.7. Experimental Results
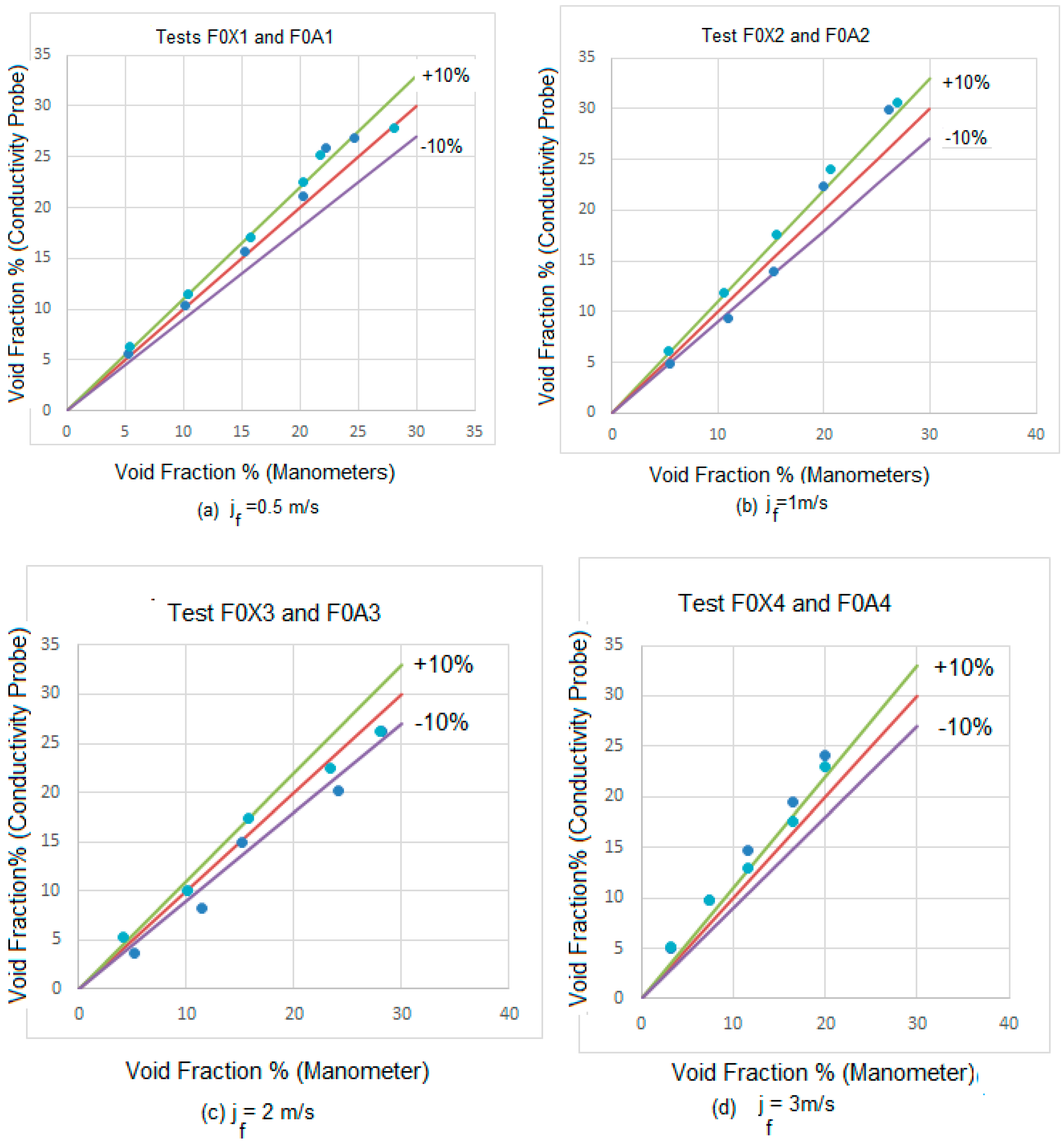
3.8. Validation of the Measurements of Two-Phase Flow Parameters Using the Conductivity Probes
4. Conductance Probes for Annular Flow
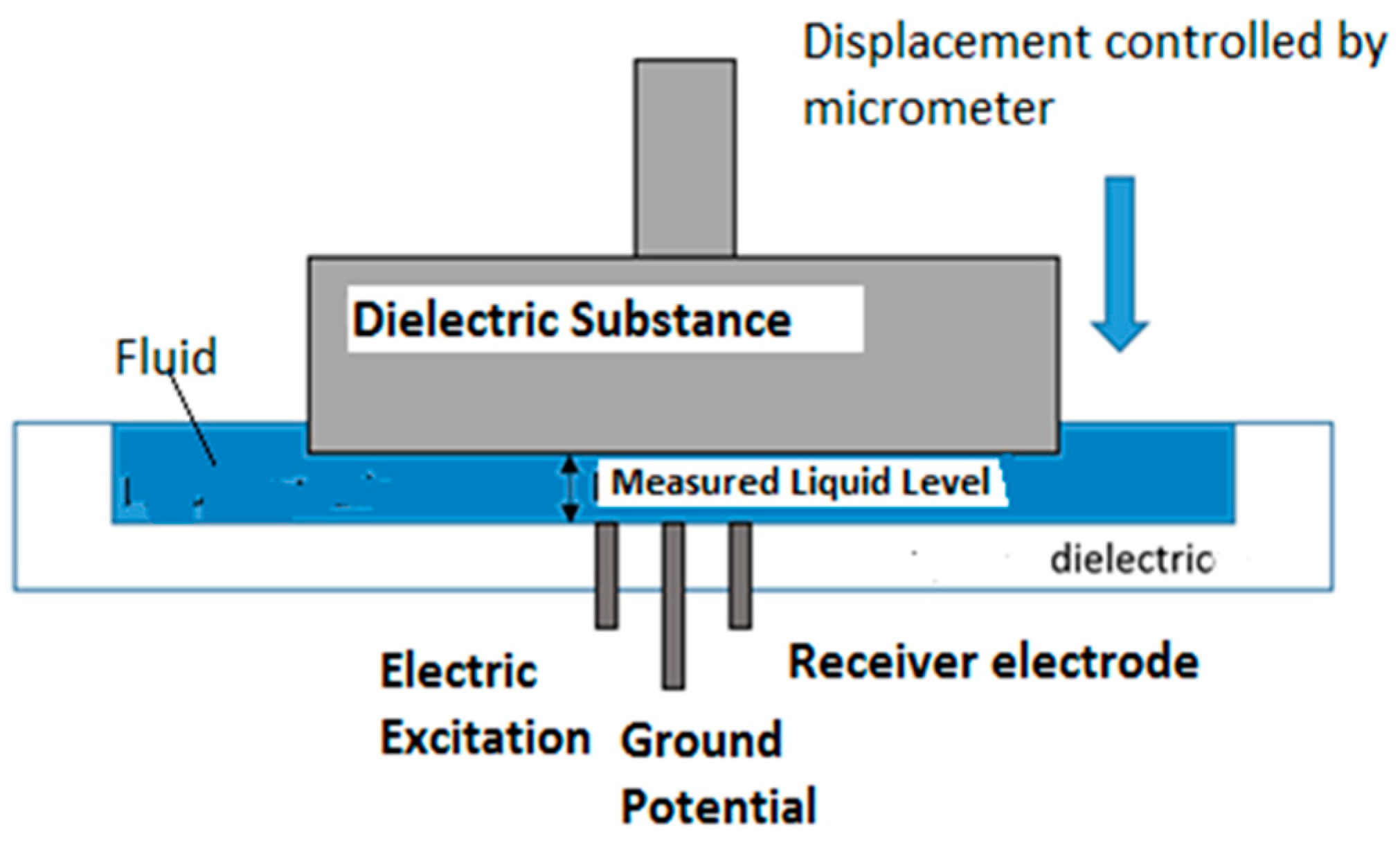
4.1. Sensor Performance
4.2. Sensor Design
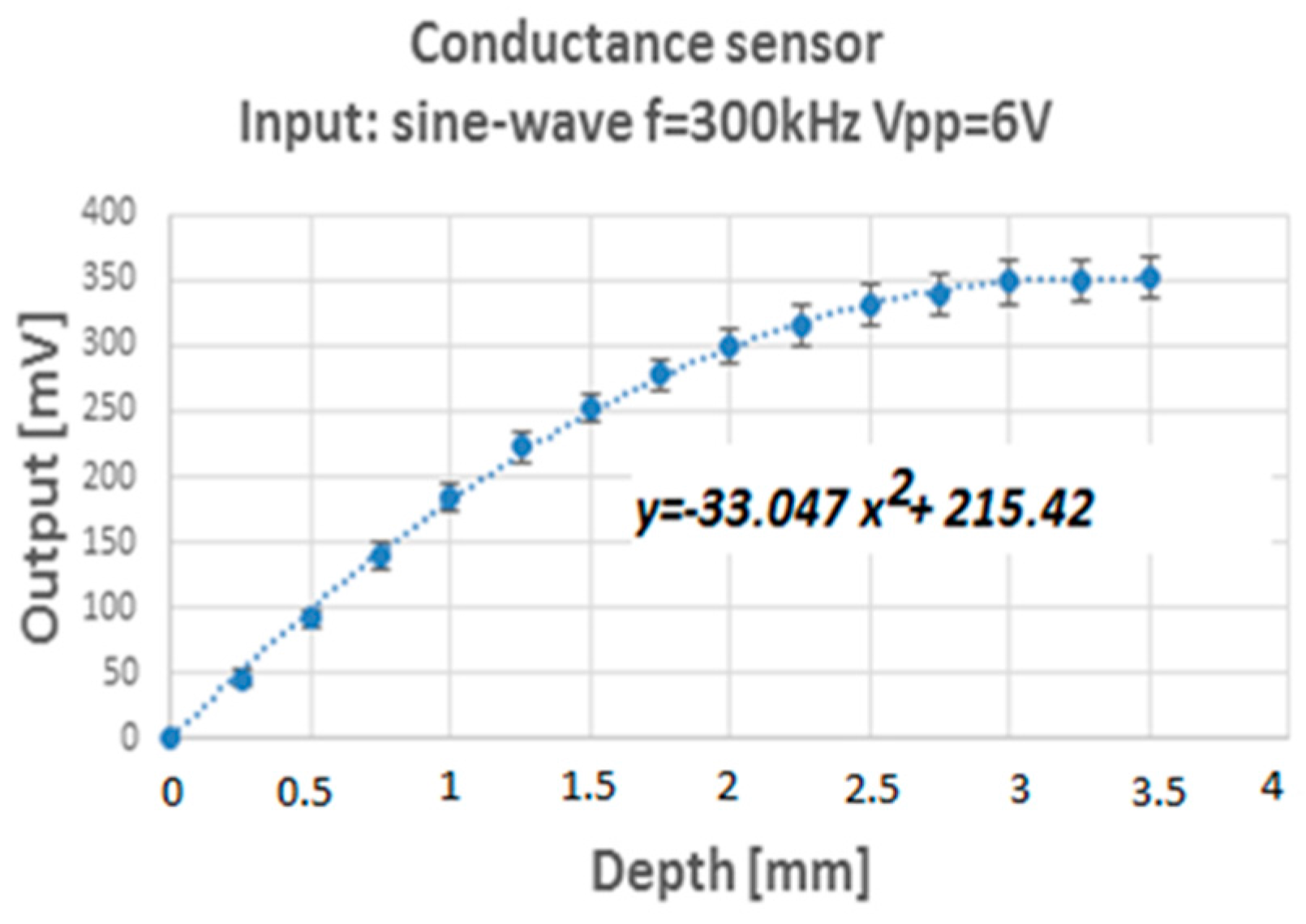
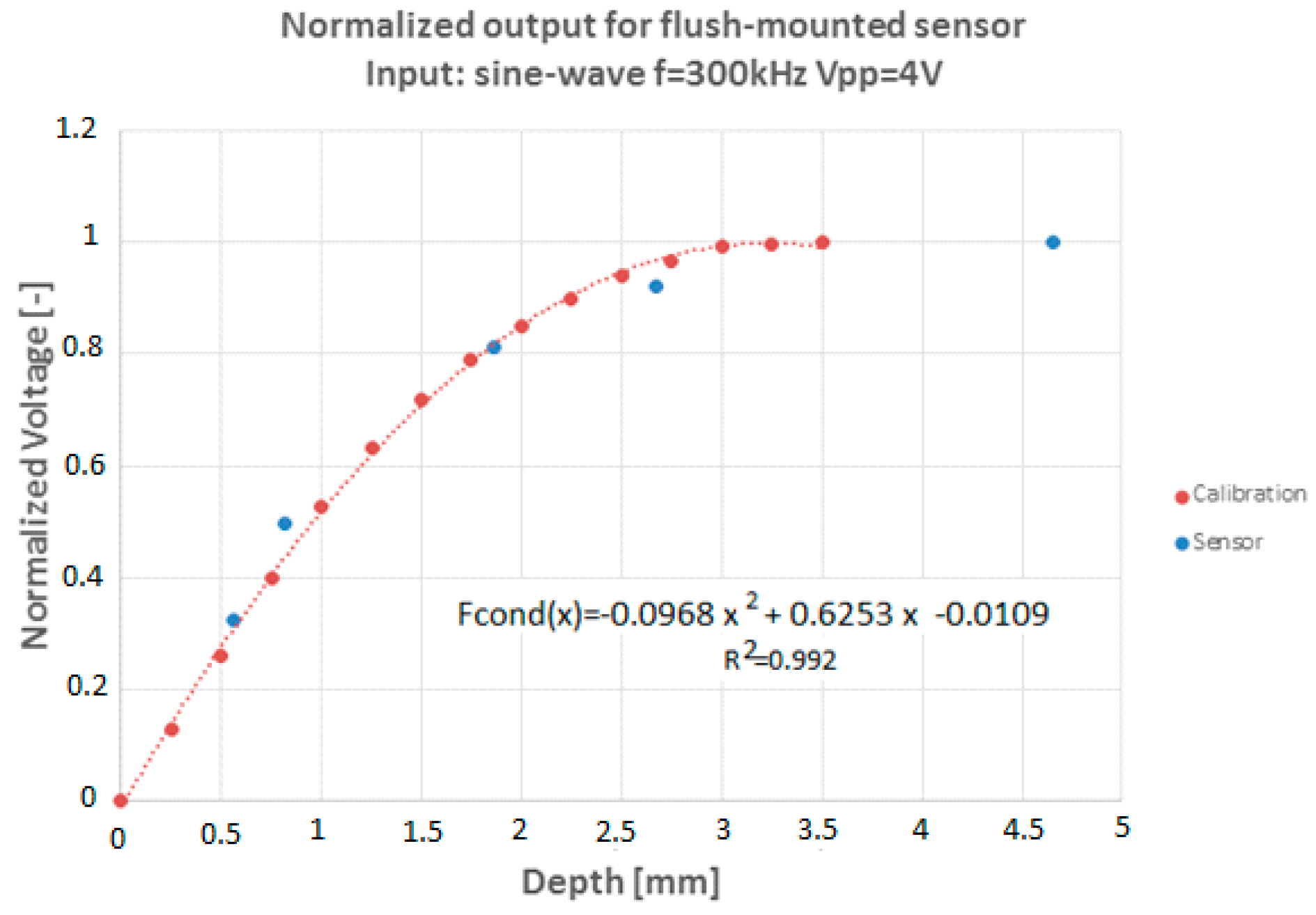
4.3. Sensor Calibration
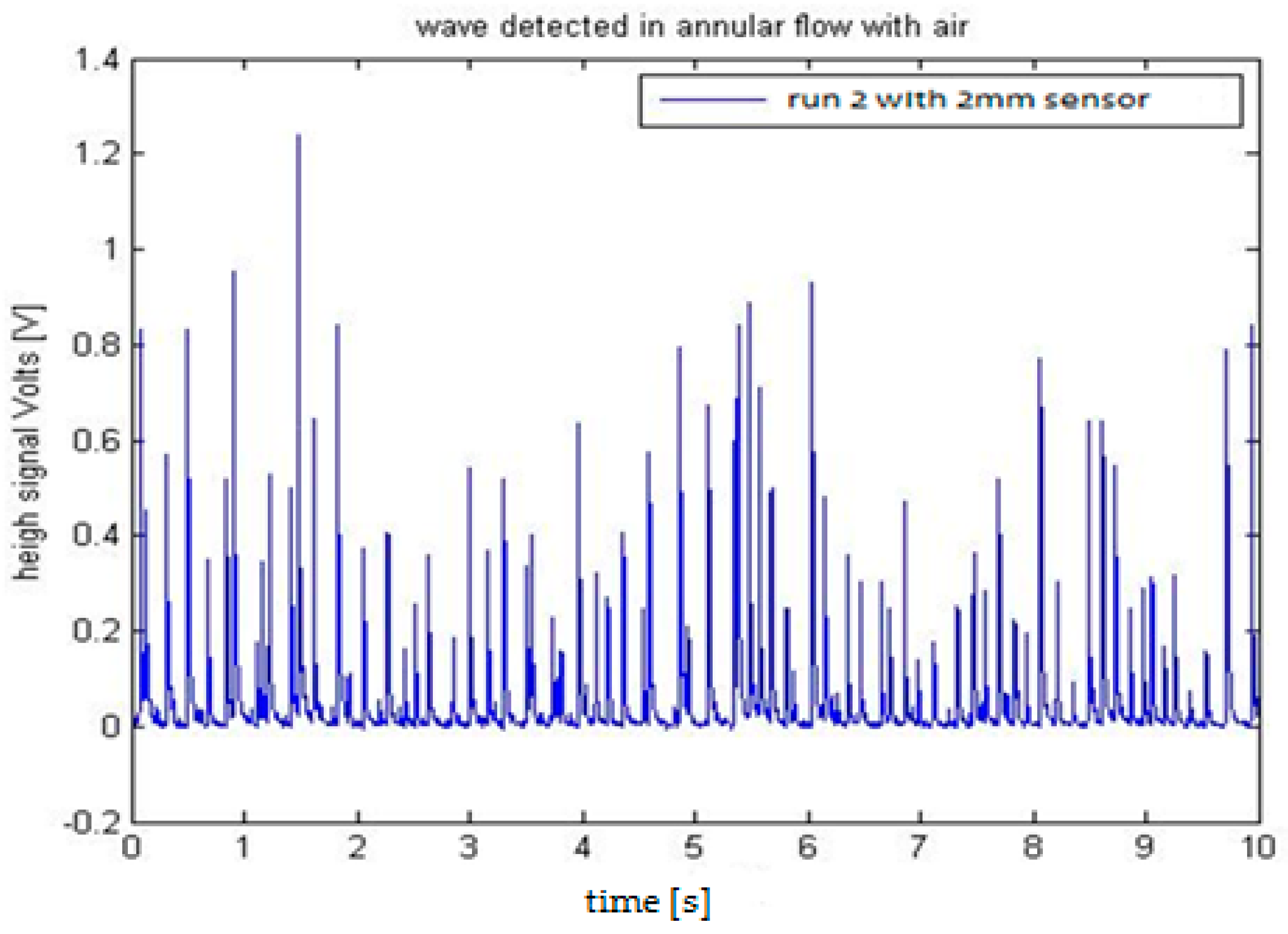
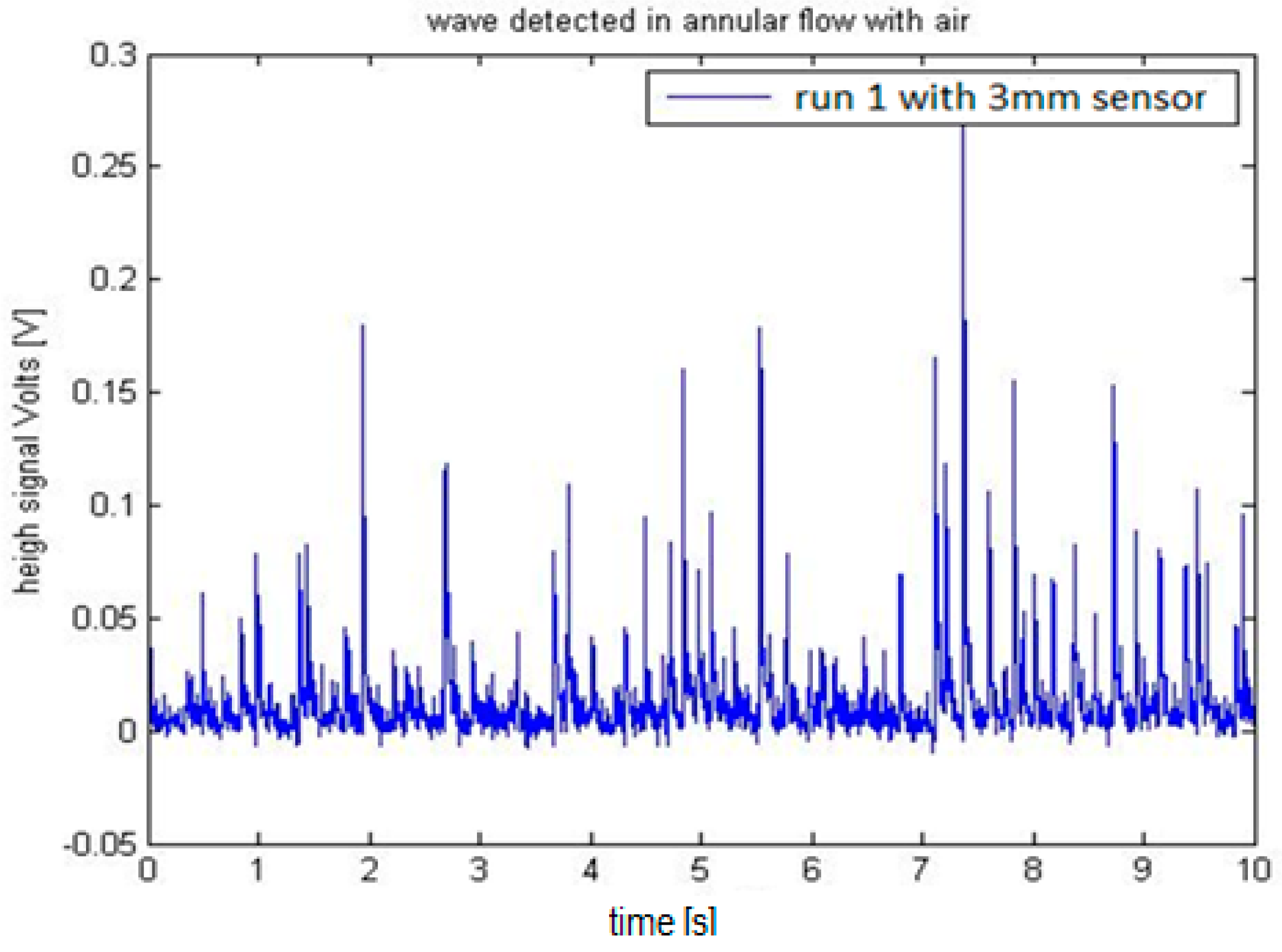
4.4. Preliminary Results
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Delhaye, J.P.; Bricard, P. Interfacial area in bubbly flow: experimental data and correlations. J. Nucl. Eng. Des. 1994, 151, 65–77. [Google Scholar] [CrossRef]
- Murgan, I.; Bunea, F.; Ciocan, G.C. Experimental PIV and LIF characterization of a bubble column flow. Flow Meas. Instrum. 2017, 54, 224–235. [Google Scholar] [CrossRef]
- Kulkarni, A.A.; Joshi, J.B.; Kumar, V.R.; Kulkarn, B.D. Simultaneous measurement of hold-up profiles and interfacial area using LDA in bubble columns: Predictions by multiresolution analysis and comparison with experiments. Chem. Eng. Sci. 2001, 56, 6437–6445. [Google Scholar] [CrossRef]
- Banasiak, R.; Wajman, R.; Jaworski, T.; Fiderek, P.; Fidos, H.; Nowakowski, J.; Sankowski, D. Study on two-phase flow regime visualization and identification using 3D electrical capacitance tomography and fuzzy-logic classification. Int. J. Multiph. Flow 2014, 58, 1–14. [Google Scholar] [CrossRef]
- Richter, T.; Eckert, K.; Yang, X.; Odenbach, S. Measuring the diameter of rising gas bubbles by means of the ultrasound transit time. Nucl. Eng. Des. 2015, 291, 64–70. [Google Scholar] [CrossRef]
- Bieberle, A.; Hoppe, D.; Schleicher, E.; Hampel, U. Void measurement using high-resolution gamma-ray computed tomography. Nucl. Eng. Des. 2011, 241, 2086–2092. [Google Scholar] [CrossRef]
- Kim, S.; Fu, Y.; Ishii, M. Study on interfacial structures in slug flows using a miniaturized four-sensor conductivity probe. Nucl. Eng. Des. 2001, 204, 45–55. [Google Scholar] [CrossRef]
- Euh, D.J.; Yun, B.J.; Song, C.H.; Kwon, T.S.; Chung, M.K.; Lee, U.C. Development of the five-sensor conductivity probe method for the local interfacial area concentration. J. Nucl. Eng. Des. 2001, 205, 35–51. [Google Scholar] [CrossRef]
- Shen, X.; Mishima, K.; Nakamura, H. Error reduction, evaluation and correction for the intrusive optical four-sensor probe measurement in multi-dimensional two-phase flow. Int. J. Heat Mass Transf. 2008, 51, 882–895. [Google Scholar] [CrossRef]
- Chiva, S.; Julia, J.E.; Hernandez, L.; Muñoz-Cobo, J.L.; Méndez, S.; Romero, A. Experimental study on two-phase flow characteristics using conductivity probes and laser doppler anemometry in a vertical pipe. Chem. Eng. Commun. 2010, 197, 180–191. [Google Scholar] [CrossRef]
- Muñoz-Cobo, J.L.; Chiva, S.; Essa, M.A.A.E.; Méndes, S. Simulation of bubbly flow in vertical pipes by coupling Lagrangian and Eulerian models with 3D random models: Validation with experimental data using multi-sensor conductivity probes and Laser-Doppler anemometry. Nucl. Eng. Des. 2012, 242, 285–299. [Google Scholar] [CrossRef]
- Muñoz-Cobo, J.L.; Chiva, S.; Essa, M.A.A.E.; Méndes, S. Experiments performed with bubbly flow in vertical pipes at different flow conditions covering the transition region: simulation by coupling Eulerian, Lagrangian and 3D random walks models. Arch. Thermodyn. 2012, 33, 3–39. [Google Scholar]
- Méndez, S.; Zenit, R.; Chiva, S.; Muñoz-Cobo, J.L.; Martínez-Martínez, S. A criterion for the transition from wall to core peak gas volume fraction distributions in bubbly flows. Int. J. Multiph. Flow 2012, 53, 56–61. [Google Scholar] [CrossRef]
- Kataoka, I.; Ishii, M.; Serizawa, A. Local formulation and measurements of interfacial area concentration in two-phase flow. Int. J. Multiph. Flow 1986, 12, 505–529. [Google Scholar] [CrossRef]
- Kim, S.; Fu, X.Y.; Wang, X.; Ishii, M. Development of the miniaturized four-sensor conductivity probe and the signal processing scheme. Int. J. Heat Mass Transf. 2000, 43, 4101–4118. [Google Scholar] [CrossRef]
- Revankar, S.T.; Ishii, M. Theory and measurement of local interfacial area using a four sensor probe in two phase flow. Int. J. Heat Mass Transf. 1993, 36, 2997–3007. [Google Scholar] [CrossRef]
- Wu, Q.; Ishii, M. Sensitivity study on double sensor conductivity probe for the measurement of interfacial area concentration in bubbly flow. Int. J. Multiph. Flow 1999, 25, 155–173. [Google Scholar] [CrossRef]
- Shen, X.; Saito, Y.; Mishima, K.; Nakamura, H. Methodological improvement of an intrusive four-sensor probe for the multi-dimensional two-phase flow measurement. Int. J. Multiph. Flow 2005, 31, 593–617. [Google Scholar] [CrossRef]
- Ishii, M. One-Dimensional Drift-Flux Model and Constitutive Equations for Relative Motion between Phases in Various Two-Phase Flow Regimes; ANL-77-47; Argonne National Lab: Lemont, IL, USA, 1977. [Google Scholar]
- Méndez, S. Medida Experimental de la Concentración de Área Interfacial en Flujos Bifásicos Finamente Dispersos y en Transición. Ph.D. Thesis, Universidad Politécnica de Valencia, Valencia, Spain, September 2008. [Google Scholar]
- Coney, M.W.E. The theory and application of conductance probes for the measurement of liquid film thickness in two-phase flow. J. Phys. E Sci. Instrum. 1973, 6, 903–910. [Google Scholar] [CrossRef]
- Damsohn, M.; Prasser, H.M. High-speed liquid film sensor for two-phase flows with high spatial resolution based on electrical conductance. Flow Meas. Instrum. 2009, 20, 1–14. [Google Scholar] [CrossRef]
- Manera, A.; Ozar, B.; Paranjape, S.; Ishii, M.; Prasser, H. Comparison between wire-mesh sensors and conductive needle-probes for measurements of two-phase flow parameter. Nucl. Eng. Des. 2009, 239, 1718–1724. [Google Scholar] [CrossRef]
- Dias, S.G.; França, F.A.; Rosa, E.S. Statistical method to calculate local interfacial variables in two-phase bubbly flows using intrusive crossing probes. Int. J. Multiph. Flow 2000, 26, 1797–1830. [Google Scholar] [CrossRef]
- Le Corre, J.M.; Ishii, M. Numerical evaluation and correction method for multi-sensor probe measurement techniques in two-phase bubbly flow. Nucl. Eng. Des. 2002, 216, 221–238. [Google Scholar] [CrossRef]
- Wu, Q.; Welter, K.; McCreary, D.; Reyes, J.N. Theoretical studies on the design criteria of double-sensor probe for the measurement of bubble velocity. Flow Meas. Instrum. 2001, 12, 43–51. [Google Scholar] [CrossRef]
- Muñoz-Cobo, J.L.; Peña, J.; Chiva, S.; Méndez, S. Monte-Carlo calculation of the calibration factors for the interfacial area concentration and the velocity of the bubbles for double sensor conductivity probe. Nucl. Eng. Des. 2007, 237, 484–496. [Google Scholar]
- Delhaye, J.M. Sur le surfaces volumiques locales e integrále en ecoulement diphasique. C. R. Acad. Sci. Paris 1976, 282, 243–246. [Google Scholar]
- Delhaye, J.M.; Achard, J.L. On the use of averaging operators in two phase flow modeling. In Thermal and Hydraulic Aspects of Nuclear Reactor Safety; American Society of Mechanical Engineers: New York, NY, USA, 1977; Volume I, pp. 289–332. [Google Scholar]
- Hibiki, T.; Ishii, M. Experimental study on interfacial area transport in bubbly two phase-flow. Int. J. Heat Mass Transf. 1999, 42, 3019–3035. [Google Scholar] [CrossRef]
- Hibiki, T.; Ishii, M.; Xiao, Z. Axial interfacial area transport in bubbly flows. Int. J. Heat Mass Transf. 2001, 44, 1869–1888. [Google Scholar] [CrossRef]
- Collier, J.G. Convective Boiling and Condensation, 2nd ed.; McGraw-Hill: New York, NY, USA, 1981. [Google Scholar]
- Wayne, C. The Interfacial Characteristics of Falling Film Reactors. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2001. [Google Scholar]
- Tiwari, R.; Damsohn, M.; Prasser, H.M.; Wymann, D.; Gossweiler, C. Multi-range sensors for the measurement of liquid film thickness distributions based on electrical conductance. Flow Meas. Instrum. 2014, 40, 124–132. [Google Scholar] [CrossRef]
- Muñoz-Cobo, J.L.; Miquel, A.; Berna, C.; Escrivá, A. Spatial and Time Evolution of Non Linear Waves in Falling Liquid Films by the Harmonic Expansion Method with Predictor-Corrector Integration. In Proceedings of the International Conference on Heat Transfer, Fluid Mechanics and Thermodynamics (HEFAT-2016), Malaga, Spain, 11–13 July 2016; pp. 91–96. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Values [mm] Prot-1 | Values [mm] Prot-2 |
|---|---|---|
| Dp | 3 | 3 |
| P | 250 | 240 |
| Dc | 2.5 | 1.2 |
| Lc | 22 | 60 |
| S | 1 | 0.5 |
| L | 3 | 20 |
| X | 1.5 | 2.2 |
| Variable | Water Value | Units | Variable | Air Value | Units |
|---|---|---|---|---|---|
| V | 5.07 | Vdc | V | 5.07 | Vdc |
| 50.5 | kΩ | Rv | 50.5 | kΩ | |
| R | 99.1 | kΩ | R | 99.1 | kΩ |
| 55.45 | kΩ | Rm | 28.75 | MΩ | |
| I | 22.5 | μA | I | 0.16 | μA |
| Void Fraction | Difference% | ||
|---|---|---|---|
| 5% | 0.498 | 0.513 | −2.946 |
| 10% | 0.482 | 0.516 | −6.677 |
| 15% | 0.481 | 0.519 | −7.337 |
| 20% | 0.483 | 0.521 | −7.141 |
| 23% | 0.487 | 0.523 | −6.941 |
| 25% | 0.535 | 0.525 | 2.023 |
| jf = 0.51 m/s | jf = 1.023 m/s | jf = 2.036 m/s | jf = 3.086 m/s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| jg [m/s] | <α>z/d=sup [−] | jg [m/s] | <α>z/d=sup [−] | jg [m/s] | <α>z/d=sup [−] | jg [m/s] | <α>z/d=sup [−] | ||||
| F0X1G00 | 0 | 0 | F0X2G00 | 0 | 0 | F0X3G00 | 0 | 0 | F0X4G00 | 0 | 0 |
| F0X1G01 | 0.035 | 5.56 | F0X2G01 | 0.058 | 5.44 | F0X3G01 | 0.097 | 5.20 | F0X4G01 | 0.166 | 4.54 |
| F0X1G02 | 0.077 | 10.18 | F0X2G02 | 0.142 | 10.92 | F0X3G02 | 0.233 | 11.46 | F0X4G02 | 0.389 | 7.48 |
| F0X1G03 | 0.125 | 15.34 | F0X2G03 | 0.235 | 15.27 | F0X3G03 | 0.47 | 15.23 | F0X4G03 | 0.662 | 12.16 |
| F0X1G04 | 0.176 | 20.32 | F0X2G04 | 0.396 | 19.90 | F0X3G04 | 0.72 | 24.08 | F0X4G04 | 1.023 | 15.60 |
| F0X1G05 | 0.257 | 22.22 | F0X2G05 | 0.67 | 26.10 | F0X3G05 | 1.181 | 28.14 | F0X4G05 | 1.695 | 19.60 |
| F0X1G06 | 0.338 | 24.73 | |||||||||
| jf = 0.506 m/s | jf = 1.027 m/s | jf = 2.026 m/s | jf = 3.033 m/s | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| jg [m/s] | <α>z/d=sup [−] | jg [m/s] | <α>z/d=sup [−] | jg [m/s] | <α>z/d=sup [−] | jg [m/s] | <α>z/d=sup [−] | ||||
| F0A1G00 | 0 | 0 | F0A2G00 | 0 | 0 | F0A3G00 | 0 | 0 | F0A4G00 | 0 | 0 |
| F0A1G01 | 0.035 | 5.42 | F0A2G01 | 0.059 | 5.36 | F0A3G01 | 0.098 | 4.18 | F0A4G01 | 0.166 | 3.30 |
| F0A1G02 | 0.077 | 10.42 | F0A2G02 | 0.141 | 10.6 | F0A3G02 | 0.228 | 10.13 | F0A4G02 | 0.396 | 7.43 |
| F0A1G03 | 0.125 | 15.75 | F0A2G03 | 0.235 | 15.5 | F0A3G03 | 0.474 | 15.73 | F0A4G03 | 0.668 | 11.6 |
| F0A1G04 | 0.174 | 20.25 | F0A2G04 | 0.361 | 20.58 | F0A3G04 | 0.727 | 23.34 | F0A4G04 | 1.037 | 16.5 |
| F0A1G05 | 0.256 | 21.8 | F0A2G05 | 0.676 | 26.98 | F0A3G05 | 1.202 | 27.98 | F0A4G05 | 1.738 | 19.95 |
| F0A1G06 | 0.406 | 28.04 | |||||||||
| Coating Type | Layer Deposition Performance | Humidity Resistance | Dielectric Behaviour |
|---|---|---|---|
| Royalac 128 | Good | Medium | Good |
| Plastik 70 | Bad | Good | Good |
| Urethane | Good | Good | Good |
| Polyurethane RS | Medium | Medium | Medium |
| Aropol | Bad | Good | Good |
| Varnish RS | Good | Bad | Medium |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñoz-Cobo, J.L.; Chiva, S.; Méndez, S.; Monrós, G.; Escrivá, A.; Cuadros, J.L. Development of Conductivity Sensors for Multi-Phase Flow Local Measurements at the Polytechnic University of Valencia (UPV) and University Jaume I of Castellon (UJI). Sensors 2017, 17, 1077. https://0-doi-org.brum.beds.ac.uk/10.3390/s17051077
Muñoz-Cobo JL, Chiva S, Méndez S, Monrós G, Escrivá A, Cuadros JL. Development of Conductivity Sensors for Multi-Phase Flow Local Measurements at the Polytechnic University of Valencia (UPV) and University Jaume I of Castellon (UJI). Sensors. 2017; 17(5):1077. https://0-doi-org.brum.beds.ac.uk/10.3390/s17051077
Chicago/Turabian StyleMuñoz-Cobo, José Luis, Sergio Chiva, Santos Méndez, Guillem Monrós, Alberto Escrivá, and José Luis Cuadros. 2017. "Development of Conductivity Sensors for Multi-Phase Flow Local Measurements at the Polytechnic University of Valencia (UPV) and University Jaume I of Castellon (UJI)" Sensors 17, no. 5: 1077. https://0-doi-org.brum.beds.ac.uk/10.3390/s17051077