Optical and Electrical Method Characterizing the Dynamic Behavior of the Fused Silica Cylindrical Resonator

Abstract
:1. Introduction
2. Basics
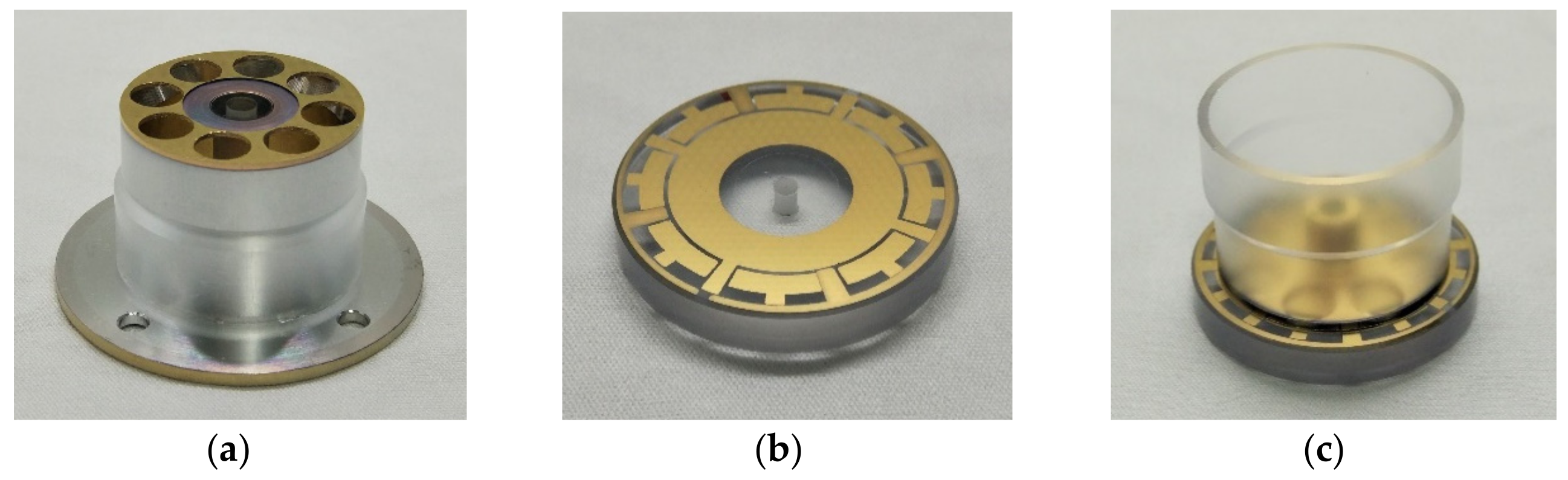
2.1. Structure of the Fused Silica Cylindrical Resonator
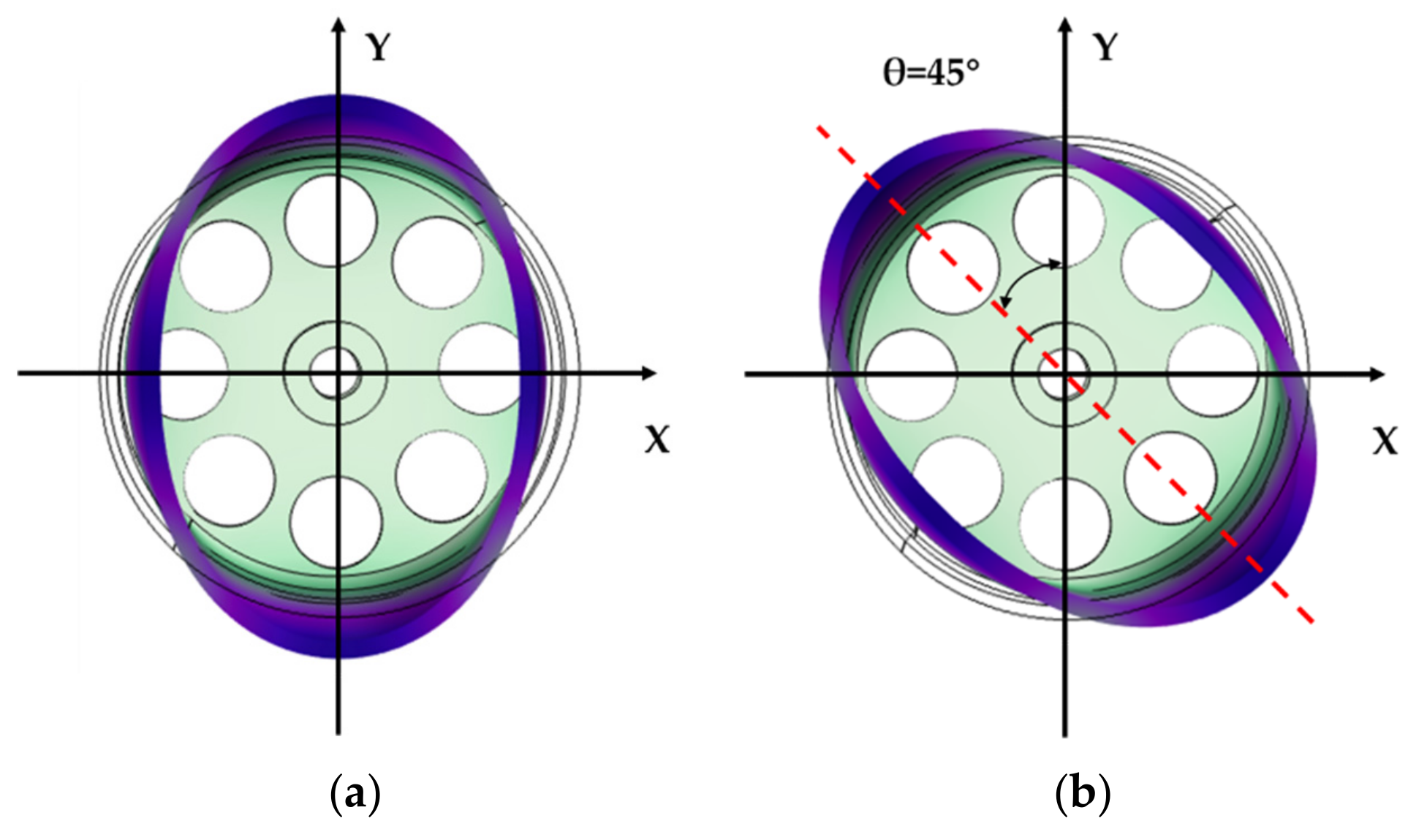
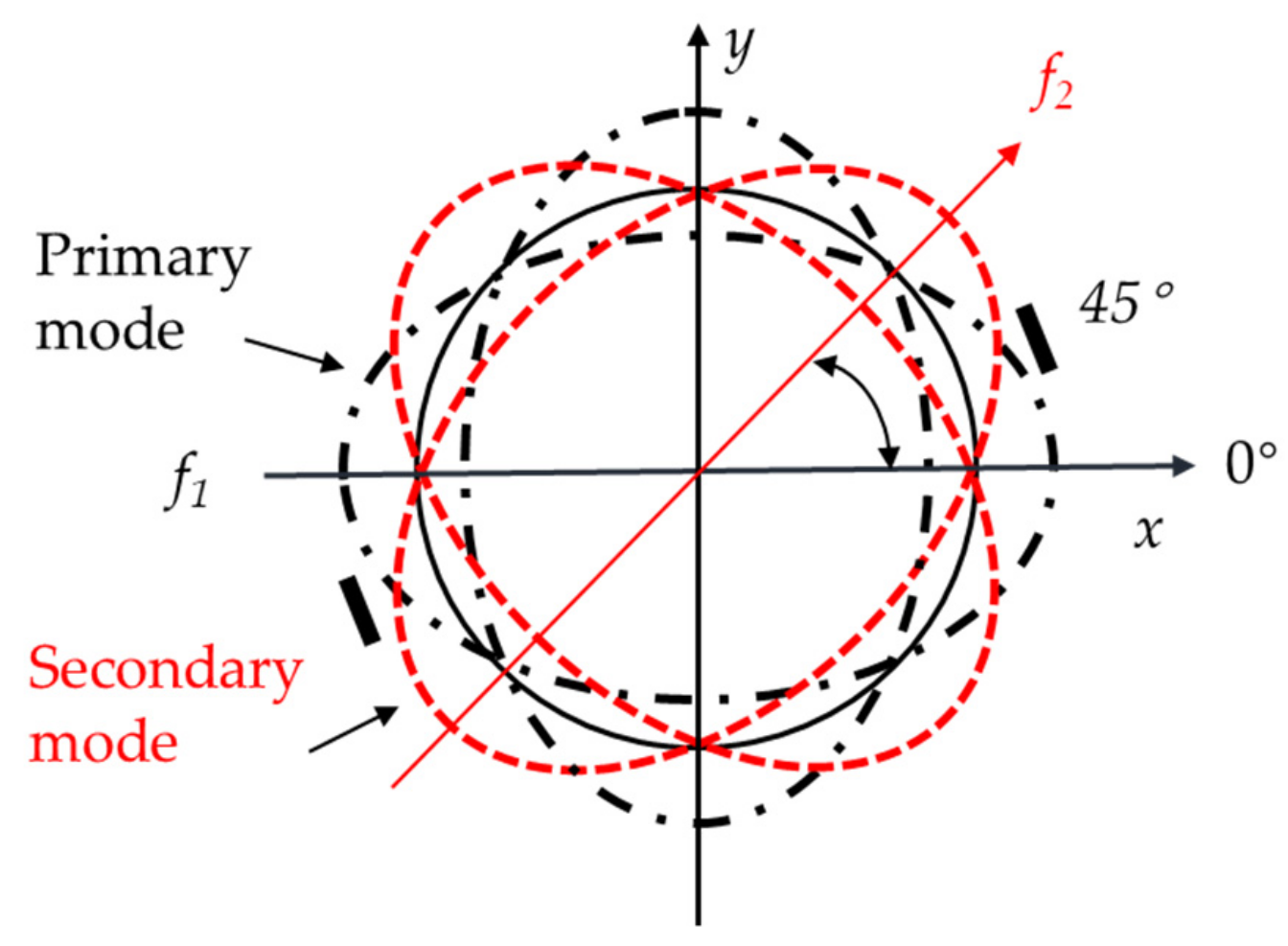
2.2. Vibration Principle
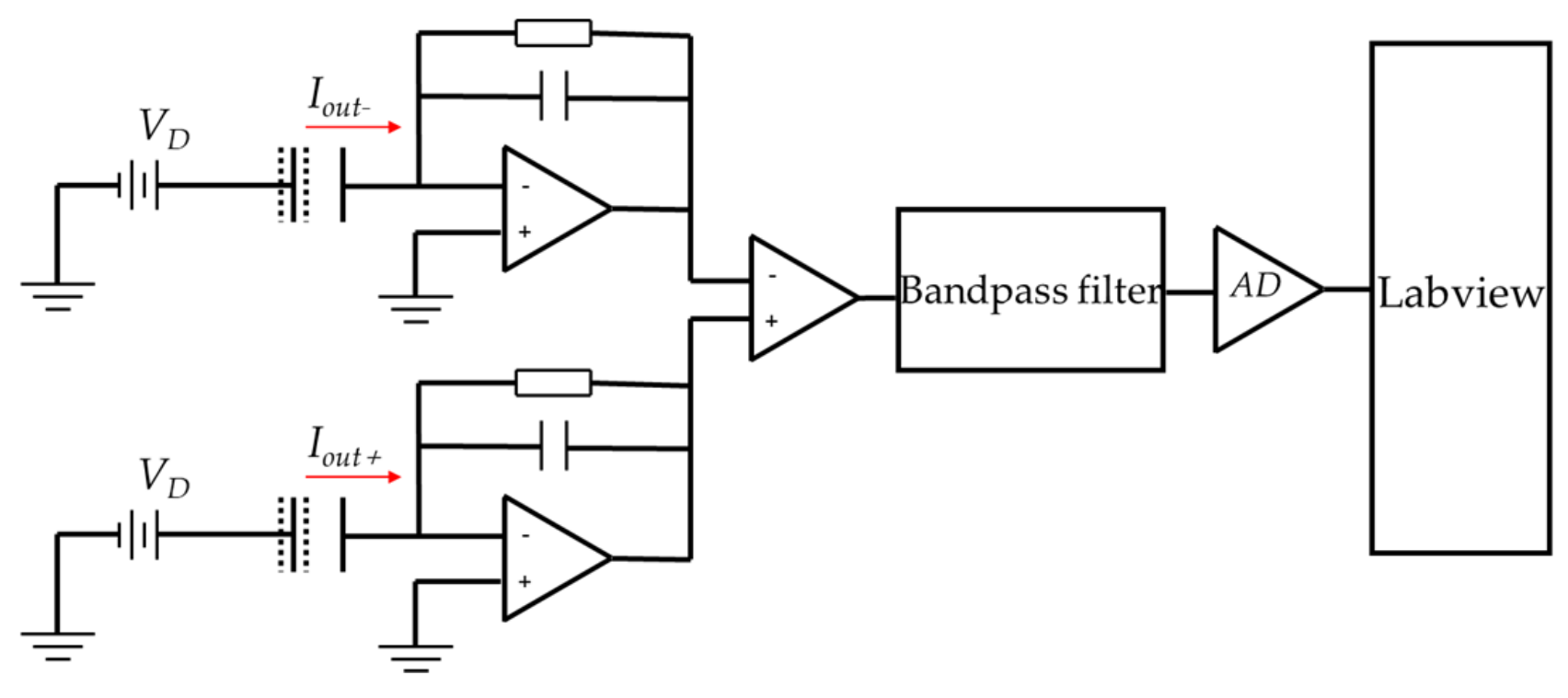
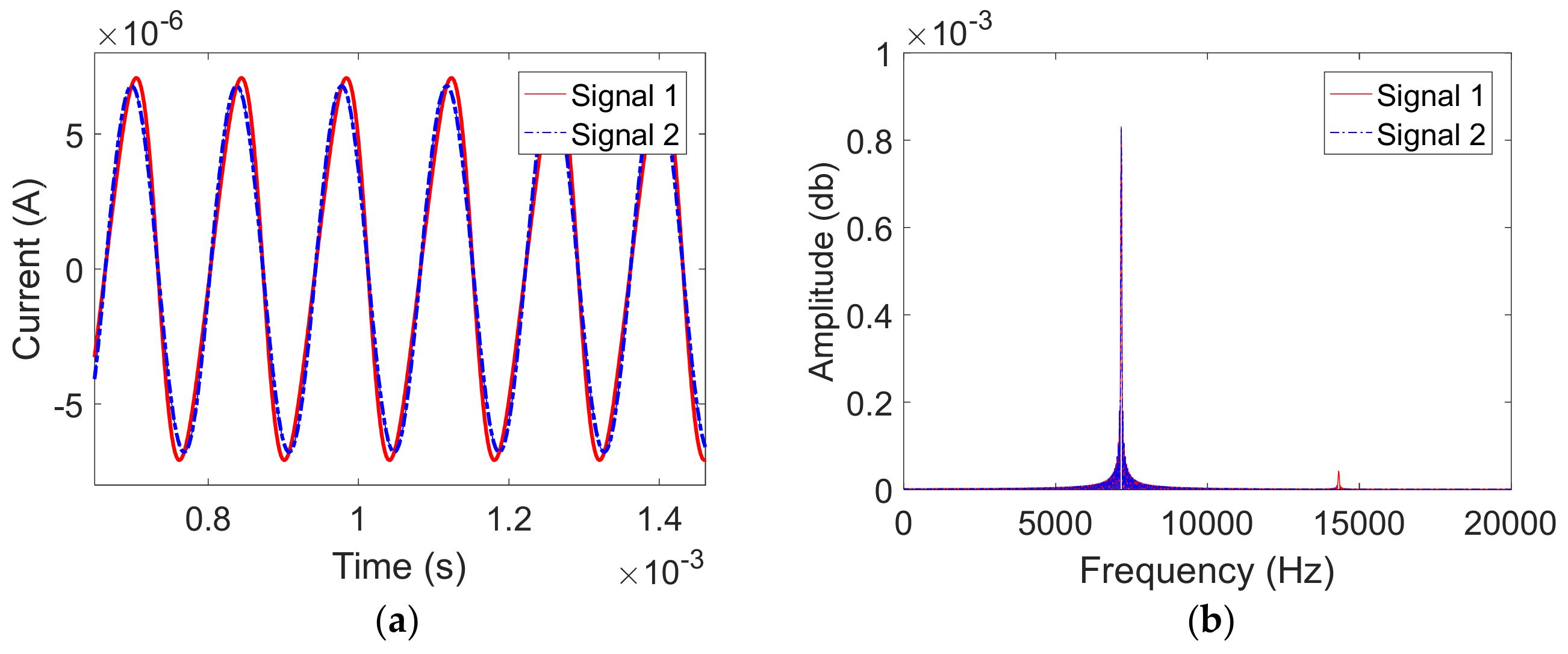
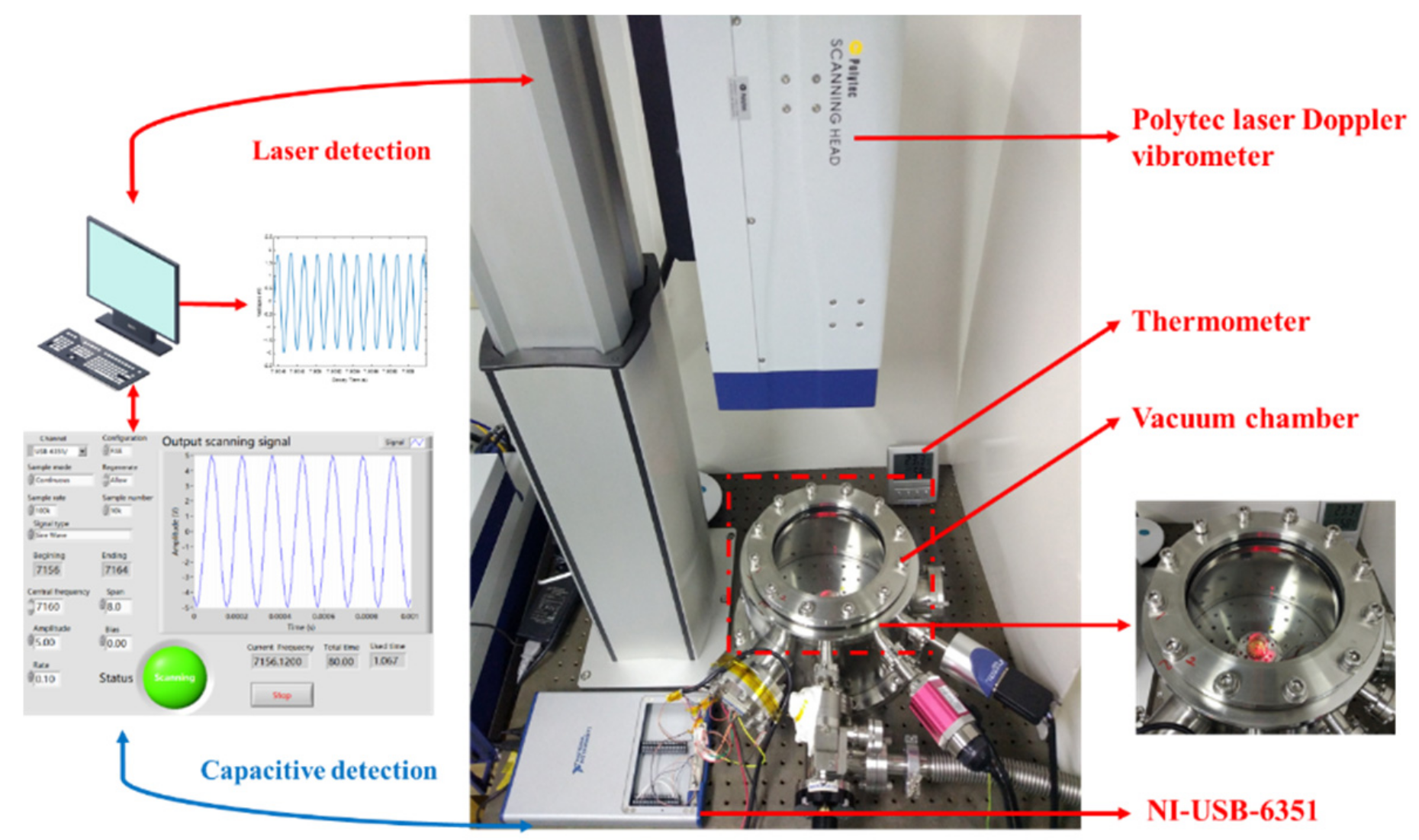
2.3. Detection Principle
3. Measurement Results
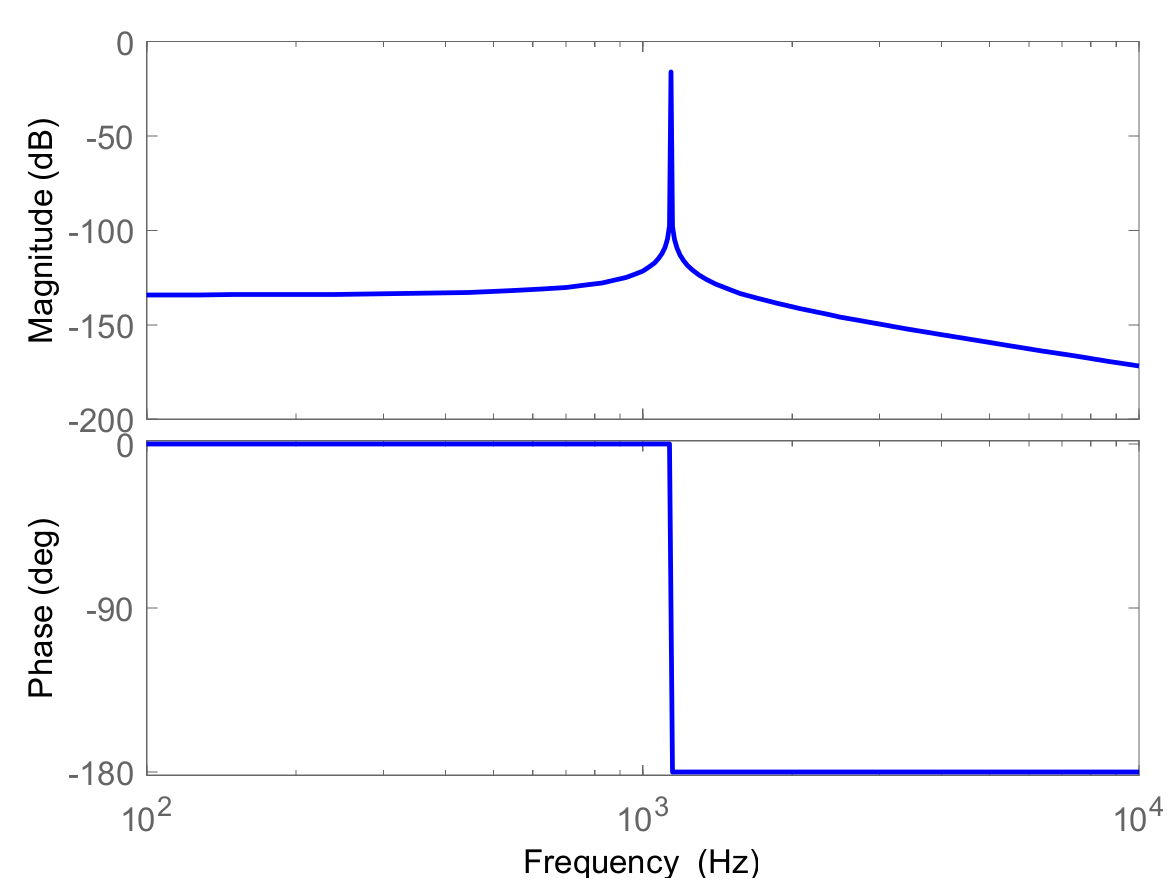
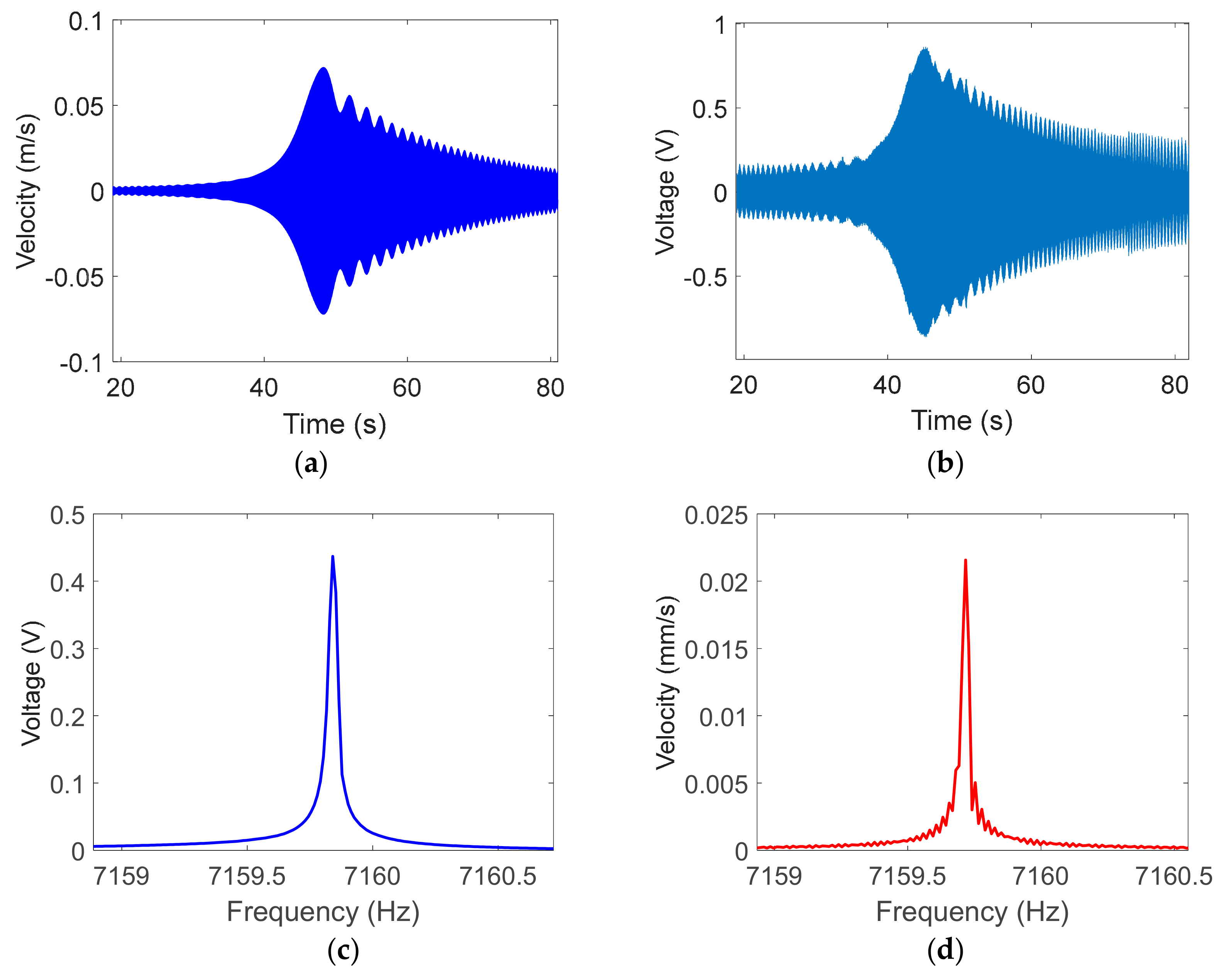
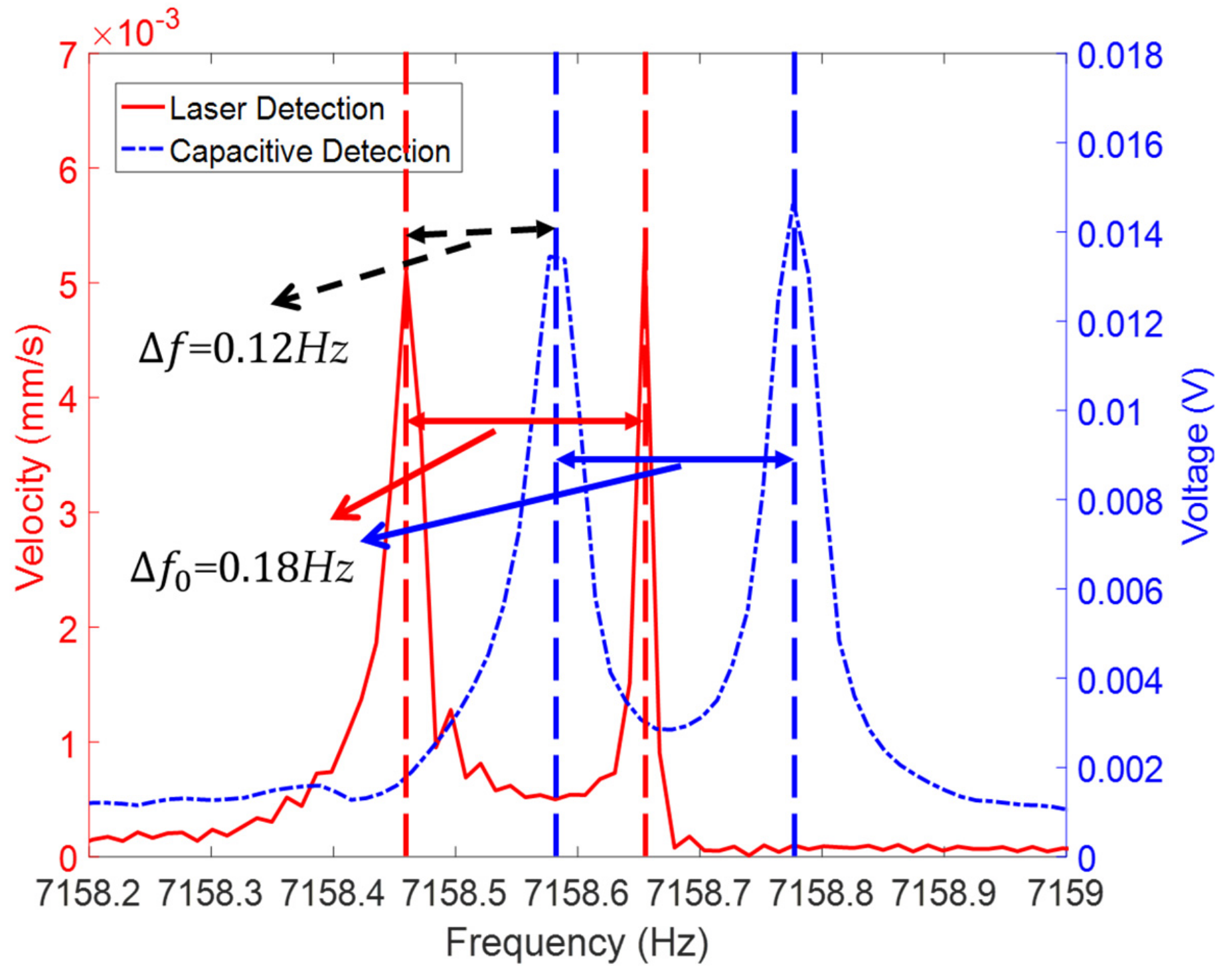
3.1. Frequency Measurement
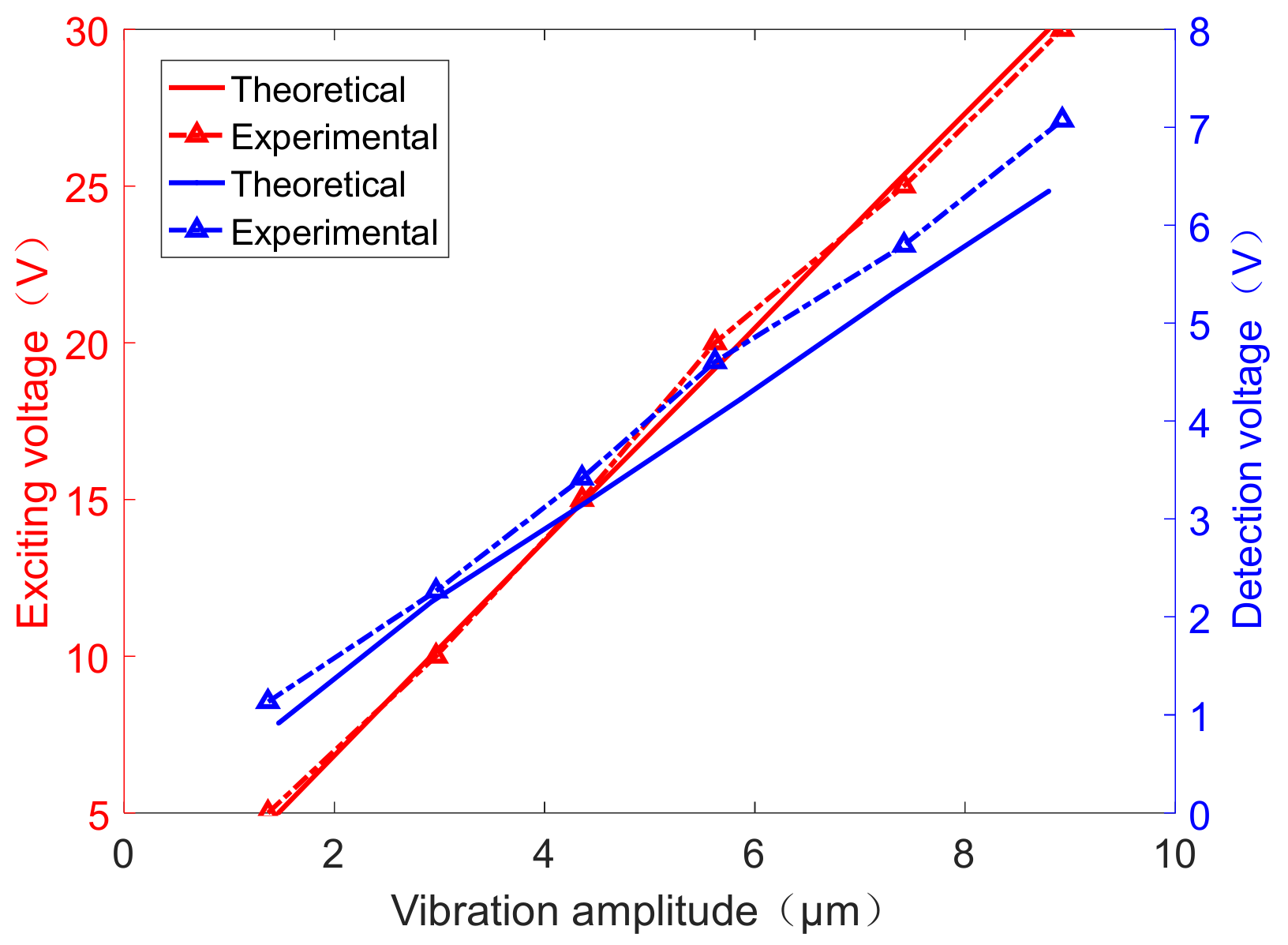
3.2. Measurement of the Vibration Amplitude
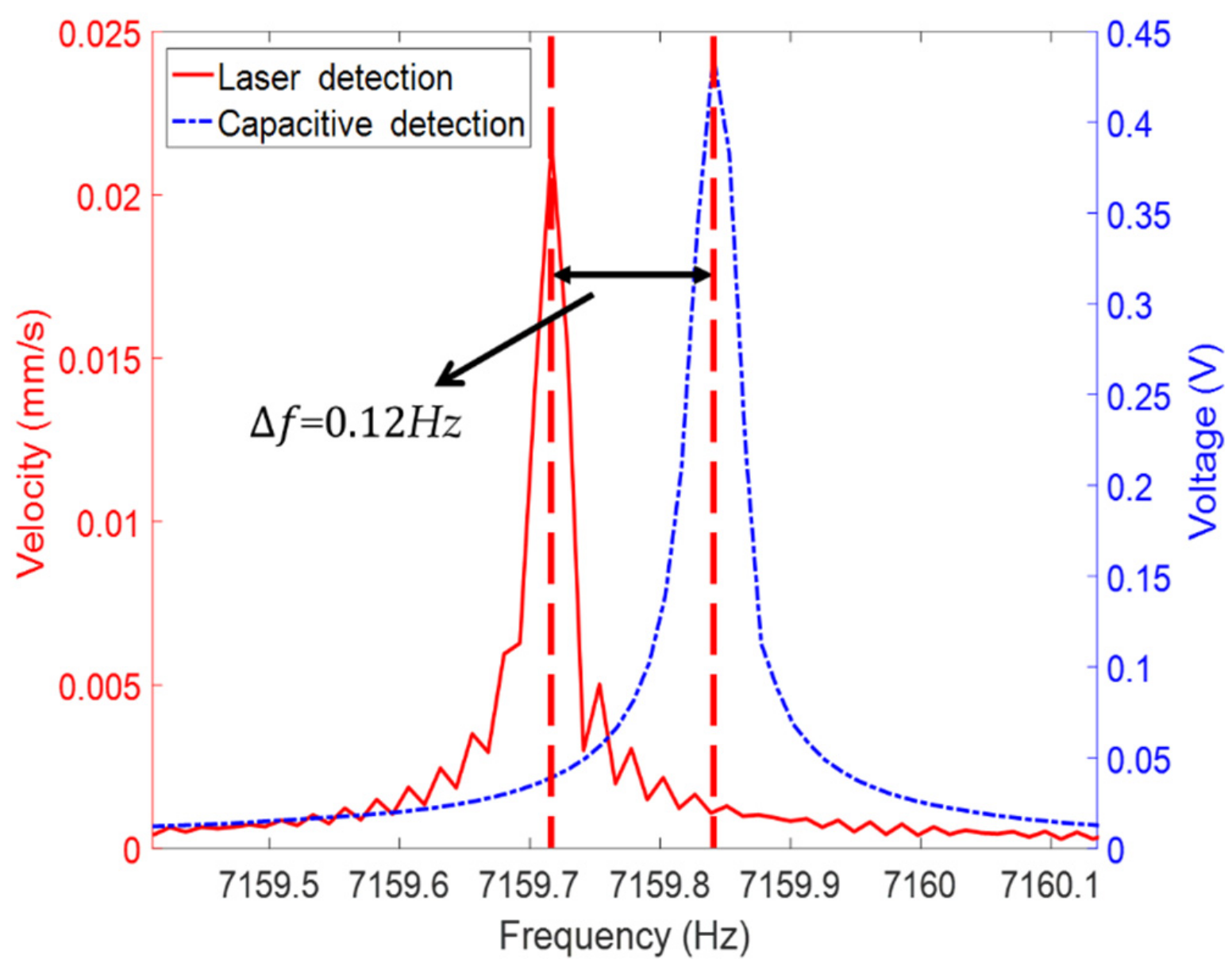
3.3. Measurement of the Frequency Split
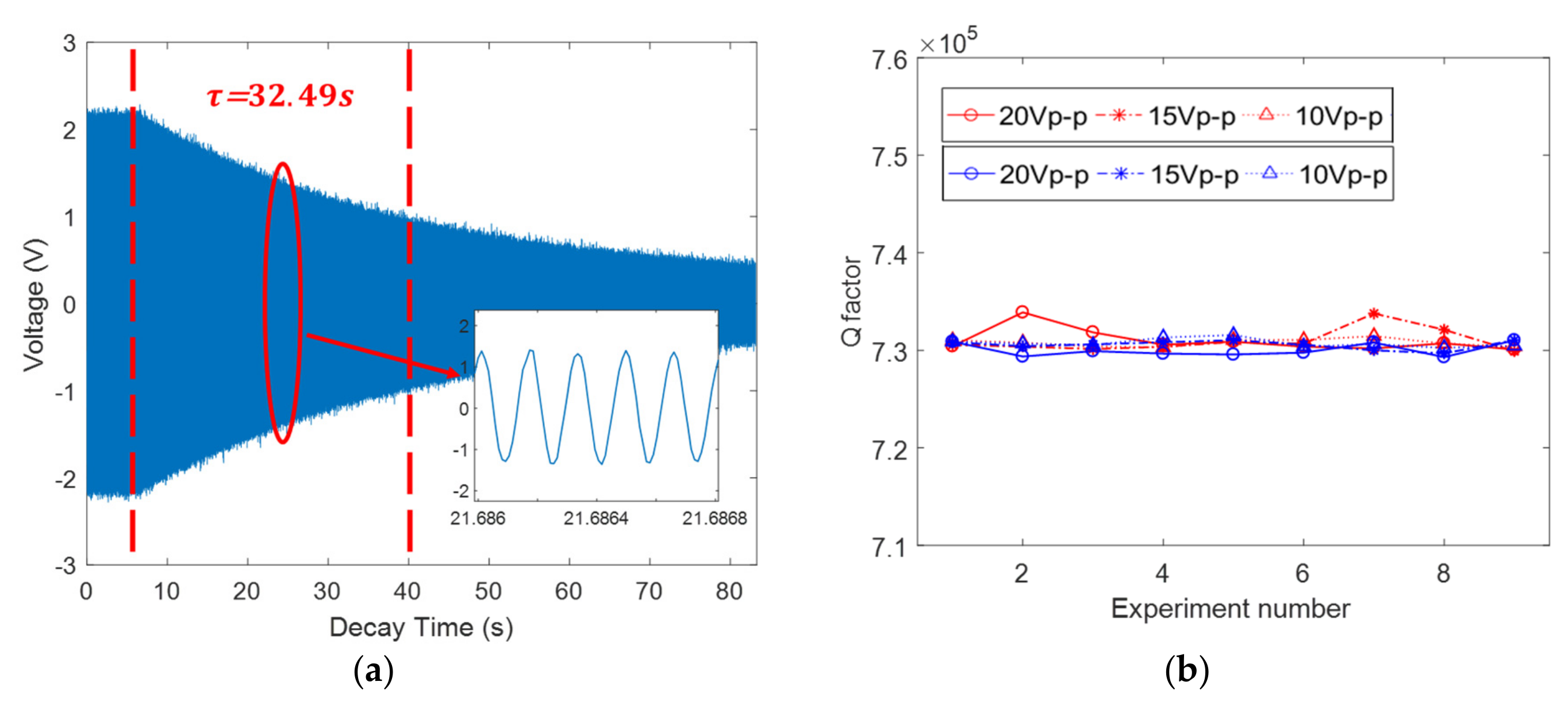
3.4. Q Factor Measurement
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IEEE Standard Specification Format Guide and Test Procedure for Coriolis Vibratory Gyros. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/servlet/opac?punumber=9606 (accessed on 29 April 2019).
- Rozelle, D.M. The hemispherical resonator gyro: From wineglass to the planets. Adv. Astronaut. Sci. 2009, 134, 1157–1178. [Google Scholar]
- Chikovani, V.V.; Yatzenko, Y.A.; Kovalenko, V.A. Coriolis force Gyroscope with High Sensitivity. U.S. Patent 7513156, 7 April 2009. [Google Scholar]
- Jeanroy, A.; Bouvet, A.; Remillieux, G. HRG and marine applications. Gyroscopy. Navig. 2014, 5, 67–74. [Google Scholar] [CrossRef]
- Jeanroy, A.; Grosset, G.; Goudon, J.C.; Delhaye, F. HRG by Sagem from laboratory to mass production. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016. [Google Scholar]
- Pan, Y.; Qu, T.; Wang, D.; Wu, S.; Liu, J.; Tan, Z.; Yang, K.; Luo, H. Observation and analysis of the quality factor variation behavior in a monolithic fused silica cylindrical resonator. Sens. Actuators A Phys. 2017, 260, 81–89. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; Wang, D.; Wang, Y.; Liu, J.; Wu, S.; Qu, T.; Yang, K.; Luo, H. Monolithic cylindrical fused silica resonators with high Q factors. Sensors 2016, 16, 1185. [Google Scholar] [CrossRef] [PubMed]
- Xi, X.; Wu, X.; Zhang, Y.; Zhou, X.; Wu, X.; Wu, Y. A study on Q factor of the trimmed resonator for vibratory cupped gyroscopes. Sens. Actuators A Phys. 2014, 218, 23–32. [Google Scholar] [CrossRef]
- Cigada, A.; Leo, E.; Vanali, M. Optical and Electrical Methods to Measure the Dynamic Behavior of a MEMS Gyroscope Sensor. In Proceedings of the 2005 ASME International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2008. [Google Scholar]
- Rembe, C.; Kant, R.; Muller, R.S. Optical measurement methods to study dynamic behavior in MEMS. Microsystems Eng. Metrol. Insp. 2003, 4400, 127–137. [Google Scholar]
- Cigada, A.; Leo, E.; Vanali, M. Electrical method to measure the dynamic behaviour and the quadrature error of a MEMS gyroscope sensor. Sens. Actuators A Phys. 2007, 134, 88–97. [Google Scholar] [CrossRef]
- Nelson, P.R.; Chu, P.B.; Pister, K.S. Optical methods for characterization of MEMS device motion. In Microlithography and Metrology in Micromachining; International Society for Optics and Photonics: Bellingham, WA, USA, 1995. [Google Scholar]
- Annovazzi-lodi, V.; Member, S.; Merlo, S.; Norgia, M.; Spinola, G.; Vigna, B.; Zerbini, S. Optical Detection of the Coriolis Force on a Silicon Micromachined Gyroscope. J. Microelectromech. Syst. 2003, 12, 540–549. [Google Scholar] [CrossRef]
- Zhang, Z.; Gao, Y.; Su, W. Laser self-mixing interferometer for MEMS dynamic measurement. Front. Optoelectron. 2013, 6, 210–215. [Google Scholar] [CrossRef]
- Luo, Y.; Qu, T.; Zhang, B.; Pan, Y.; Xiao, P. Simulations and Experiments on the Vibrational Characteristics of Cylindrical Shell Resonator Actuated by Piezoelectric Electrodes with Different Thicknesses. Shock Vib. 2017, 2017, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Xi, X.; Wu, Y.; Zhang, Y.; Wu, X.; Zheng, Y.; Wu, X. Simple Acoustic Method for Modal Parameter Measurement of the Resonator for Vibratory Shell Gyroscope. IEEE Sens. J. 2014, 14, 4069–4077. [Google Scholar]
- Panahi, A.; Magierowski, S.; Sabour, M. A Non-Invasive Characterization Method for MEMS Based Devices. In Proceedings of the IEEE 61st International Midwest Symposium on Circuits and Systems, Windsor, ON, Canada , 5–8 August 2018; pp. 1094–1097. [Google Scholar]
- Wu, Y.; Wu, X.; Xi, X.; Sun, J.; Zhang, Y.; Qu, L. Method and Device for Screening Cylindrical Shell Vibrating Gyro Resonator. CN Patent 107843269 A, 2017. (In Chinese). [Google Scholar]
- He, G.; Gordenker, R.; Woo, J.-K.; Nees, J.A.; Shiari, B.; Nagourney, T.; Cho, J.-Y.; Najafi, K. Self-mixing interferometry for precision displacement measurement in resonant gyroscopes. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Naples, FL, USA, 1–5 April 2019; pp. 183–186. [Google Scholar]
- Shoaib, M.; Hamid, N.H.; Malik, A.F.; Zain Ali, N.B.; Tariq Jan, M. A Review on Key Issues and Challenges in Devices Level MEMS Testing. J. Sensors 2016, 2016, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Bu, F.; Xu, D.; Zhao, H. Quick measurement method of resonant frequency and Q value for silicon MEMS gyroscope. J. Chin. Inert. Technol. 2018, 21, 133–140. (In Chinese) [Google Scholar]
- Lynch, D.D. Vibratory Gyro Analysis by the Method of Averaging. In Proceedings of the 2nd St. Petersburg Conference on Gyroscopic Technology and Navigation, St. Petersburg, Russia, 24–25 May 1995; pp. 26–34. [Google Scholar]
- Wang, X.; Wu, W.; Luo, B.; Fang, Z.; Li, Y.; Jiang, Q. Force to rebalance control of HRG and suppression of its errors on the basis of FPGA. Sensors 2011, 11, 11761–11773. [Google Scholar] [CrossRef] [PubMed]
- Senkal, D. Micro-glassblowing Paradigm for Realization of Rate Integrating Gyroscopes. Ph.D. Thesis, University of California, Irvine, CA, USA, 2015. [Google Scholar]
- Wu, Y.; Pan, Y.; Wang, D.; Qu, T.; Huang, Y. The Study on Temperature Characteristics of a Monolithic Fused Silica Cylindrical Resonator. Jimec-16 2016, 44–49. [Google Scholar]
- Bisegna, P.; Caruso, G. Frequency split and vibration localization in imperfect rings. J. Sound Vib. 2007, 306, 691–711. [Google Scholar] [CrossRef]
- Rourke, A.K.; Mcwilliam, S.; Fox, C.H.J. Multi-mode trimming of imperfect rings. J. Sound Vib. 2001, 248, 695–724. [Google Scholar] [CrossRef]
- Tao, Y.; Wu, X.; Xiao, D.; Wu, Y.; Cui, H.; Xi, X.; Zhu, B. Design, analysis and experiment of a novel ring vibratory gyroscope. Sensors Actuators A Phys. 2011, 168, 286–299. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Xi, X.; Zhang, Y.; Wu, X. Analysis on node position of imperfect resonators for cylindrical shell gyroscopes. Sensors 2016, 16, 1206. [Google Scholar] [CrossRef]
- Darvishian, A.; Shiari, B.; Cho, J.Y.; Najafi, K. Effect of Imperfections on Fused Silica Shell Resonators. In Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition; ASME, Montreal, QC, Canada, 14–20 November 2014. [Google Scholar]
- Matveev, V.A.; Lipatnikov, V.I.; Alekin, A.V.; Basarab, M.A.; Kravchenko, V.F. Solid State Wave Gyro (Translated Essays), 1st ed.; National Defense Industry Press: Beijing, China, 2009. (In Chinese) [Google Scholar]
- Startin, W.J.; Beilby, M.A.; Saulson, P.R. Mechanical quality factors of fused silica resonators. Rev. Sci. Instrum. 1998, 69, 3681–3689. [Google Scholar] [CrossRef]
- Zhang, M.; Llaser, N.; Rodes, F. High-precision time-domain measurement of quality factor. IEEE Trans. Instrum. Meas. 2012, 61, 842–844. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LDV | 7159.717 | 7159.766 | 7159.79 | 7159.851 | 7159.875 | 7159.9 | 7159.961 |
| CD | 7159.840 | 7159.890 | 7159.914 | 7159.975 | 7160 | 7160.024 | 7160.087 |
| 0.123 | 0.124 | 0.125 | 0.124 | 0.125 | 0.125 | 0.126 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Z.; Qu, T.; Pan, Y.; Jia, Y.; Fan, Z.; Yang, K.; Yuan, J.; Luo, H. Optical and Electrical Method Characterizing the Dynamic Behavior of the Fused Silica Cylindrical Resonator. Sensors 2019, 19, 2928. https://0-doi-org.brum.beds.ac.uk/10.3390/s19132928
Qiu Z, Qu T, Pan Y, Jia Y, Fan Z, Yang K, Yuan J, Luo H. Optical and Electrical Method Characterizing the Dynamic Behavior of the Fused Silica Cylindrical Resonator. Sensors. 2019; 19(13):2928. https://0-doi-org.brum.beds.ac.uk/10.3390/s19132928
Chicago/Turabian StyleQiu, Zhinan, Tianliang Qu, Yao Pan, Yonglei Jia, Zhenfang Fan, Kaiyong Yang, Jie Yuan, and Hui Luo. 2019. "Optical and Electrical Method Characterizing the Dynamic Behavior of the Fused Silica Cylindrical Resonator" Sensors 19, no. 13: 2928. https://0-doi-org.brum.beds.ac.uk/10.3390/s19132928