1. Introduction
Pipeline transportation is the most economical and reasonable method for transporting oil and gas because of its low transportation cost, stable continuous supply, and large transportation capacity [
1,
2]. With the increase in pipeline quantity and pipeline age, pipeline leakage and deflagration accidents caused by corrosion, accidental damage, and other reasons are becoming increasingly serious, which causes great damage to life and property and safety of people and the ecological environment [
3,
4]. In order to ensure safe transportation of the pipeline, it is necessary to carry out pipeline inspections. The internationally recognized conventional pipeline inspection method is pipeline in-line inspection (ILI), the ILI tools can be mounted using different sensors for different parameter measurements. In order to maintain the pipeline safety and reduce accidents due to pipeline displacement and deformation [
1,
5], the pipeline centerline and coordinate measurement system has been playing a big role in positioning and safety [
6].
The common practice is to use in-line inspection [
7] based on strapdown inertial navigation technology to realize the pipeline centerline and coordinate measurement [
8,
9]. At present, the geographic trajectory of underground pipelines is mainly measured by high-precision inertial measurement units (IMUs) and micro-electromechanical-systems (MEMS) inertial measurement units (MEMS-IMUs) [
10,
11]. Inertial measurement units can sense the angular velocity and specific force of the pipeline inspector in three directions, and by navigation calculation the position, velocity, and attitude navigation information can be obtained. Due to the device error influence of the IMU itself, the position, velocity, and attitude errors of the centerline in-line inspector system will accumulate rapidly, which will seriously affect the measurement accuracy. Thus, it is necessary to compensate for these errors by combining an odometer, an above-ground marker (AGM), and other observation information.
An odometer can measure forward distance of the pipeline centerline in-line inspector, and the distance can be converted to forward speed to suppress the accumulation of navigation and positioning errors. An above-ground marker whose coordinates are known provides position correction information for pipeline centerline in-line inspectors. The navigation calculation combining IMU with AGM and odometer can significantly improve the positioning accuracy. However, during the actual inspection, owing to the slip of the odometer (especially in the bend), the odometer cannot guarantee the continuous and stable output of the speed information. When the odometer slips, the IMU error diverges rapidly without restraint. Hence, it is necessary to introduce new methods for pipeline navigation to increase the positioning accuracy. Recently, various algorithms and approaches have been proposed to compensate the positioning errors due to slip and slide. In [
12], multi-sensor data fusion was adopted using adaptive fuzzy Kalman filtering for the errors to not only detect any occurrence of slip and slide in the system, but also compensate the resulting errors. Some scholars proposed many practical intelligent methods based on artificial intelligence (AI) for inertial navigation error suppression [
13,
14,
15,
16,
17,
18,
19]. However, currently no relevant research is found in the error compensation of pipeline centerline measurement during the occurrence of odometer slip.
With the aim to increase the position accuracy for small-diameter pipelines, a compensation method was proposed to correct velocity errors due to odometer slip and improve the measurement accuracy. The actual measurement results show that this method can be used to effectively restrain the inertial navigation error divergence and improve the positioning accuracy of the pipeline centerline measurement. Firstly, the coordinates of the pipeline centerline were obtained by an extended Kalman filter (EKF) using the IMU, above-ground marker, and odometer. Secondly, the acceleration information processed using the wavelet transform (WT) was used to identify every girth weld. According to the girth weld, the measured length of each section of the pipeline and bend was determined. Then the measured length was compared with the engineering data to determine whether the odometer slipped. If the errors are in the allowable range, the slip can be ignored, and the velocity data of the odometer can be used as the training set for the model. If the errors exceed the allowable range, the slip of the odometer cannot be ignored, and the odometer velocity needs to be corrected. Finally, the model based on long short-term memory (LSTM) network and the odometer velocity when the odometer works was trained to predict the velocity error when the odometer slipped, and the predicted velocity error could be used for coordinate calculation and centerline measurement.
2. Principle of IMU in-Line Inspection Measurement
The IMU in-line inspection measurement system is pushed forward by the oil and gas inside the buried pipeline. The IMU is used to measure the angle, orientation, and distance of the system in real time. When the initial position is known, the geographic coordinates of the inspection system at each sampling time can be calculated in order to achieve positioning. Because of the errors of the gyroscope and accelerometer in the inertial device, the errors of the sensor are amplified with time after integration. Other sensors, such as the odometer and ground tracking system, are used to correct the errors in order to achieve accurate positioning. The pipeline centerline measurement system based on IMU, shown in
Figure 1, is composed of MEMS-IMU, odometer, ground tracking system, velocity control unit, data storage unit, and so on.
The IMU is mainly composed of three TS-02X1 MEMS gyroscopes, three JL-01FX1 accelerometers, HJ-148A power supply module, FG-167B integrated information processing circuit, FG-144C data storage circuit, information processing software, and so on, as shown in
Figure 2. The MEMS gyroscope senses the angular motion of the carrier in three axes, to measure the angular velocity of the carrier, and the analog signal proportional to the angular velocity of the carrier is output. The accelerometer senses the linear motion of the carrier in three axes to measure the linear acceleration of the carrier and output frequency signals proportional to the acceleration. The signal processing circuit collects the outputs of angular rate signals of gyro, the frequency signals of accelerometer, temperature signals, and the frequency signals of the odometer. The data storage circuit saves the collected data in real time. The data stored in the inertial measurement device can been obtained to carry out navigation calculation, and odometer information and ground marking information are used to correct navigation errors, so as to obtain position, attitude angle, and speed information. The process of navigation calculation can be found in some references [
20].
The IMU is the main sensor for collecting pipeline in-line inspection gauge (PIG) motion data. The simplified linear error equations that describe the dynamic behavior of the inertial measurement unit are given by
where
is velocity error;
is attitude error;
L and
l are, respectively, latitude and longitude; and
h is the elevation.
and
are the Earth radius under the WGS-84 geography coordinator system.
is specific force value,
is the transmit matrix from the PIG carrier coordinate system into the local navigation coordinate system,
is the Earth angular velocity in the navigation coordinate system,
is the angular rate relative to the Earth navigation coordinate system.
,
are velocity in north, east, and down direction, respectively [
20]. The centerline measurement system based on the MEMS-IMU is a non-linear continuous system, and the standard Kalman filter is unsuitable for the state or parameter estimation of the system. Therefore, the EKF can be used to linearize the error state of the nonlinear continuous system locally to achieve an optimal estimation. The dynamic measurement model formed in the previous section is used to estimate the system state. The estimated state vectors include the position error,
; velocity error,
; attitude error,
gyroscope random bias error,
and acceleration error,
, total fifteen dimensions, as follows [
20]:
are north position error, east position error, and vertical position error in the navigation coordinate system.
are north, east, and vertical velocity error in the navigation coordinate system.
are roll angle error, pitch angle error, and heading angle error. The error model of IMU can be represented by a continuous linear stochastic system as follows:
In the formula,
is the dynamic matrix,
is the state vector,
is the noise input coefficient matrix, and
is the noise vector. The discretized error state model of the inertial navigation system can be expressed as follows:
is a
order state vector,
is a
order transformation matrix,
is a
noise distribution matrix, and
is Gauss white noise with unit variance. By applying the Taylor series expansion and ignoring the higher-order terms, the linear system model can be expressed as follows:
where
white noise of position, velocity, and angle for IMU. The estimation error of EKF is the latest time estimate of the system state vector, and the filter works in a closed loop with an error feedback correction. Therefore, the system error state vector completes the observation update, it is used to correct the navigation state and parameters and reset the error state vector to zero. The state updating equation is expressed in the discrete form as follows:
where
represents the filter gain matrix.
H is the design matrix. The corresponding covariance matrix is:
In the formula,
is the covariance matrix for the error state vector,
is the state transition matrix, and
is the covariance matrix of the system noise. The EKF updates the covariance matrix of the estimated state error vector as follows:
is the covariance matrix for the observation vectors. Further details regarding the EKF can be found in other references [
21,
22,
23].
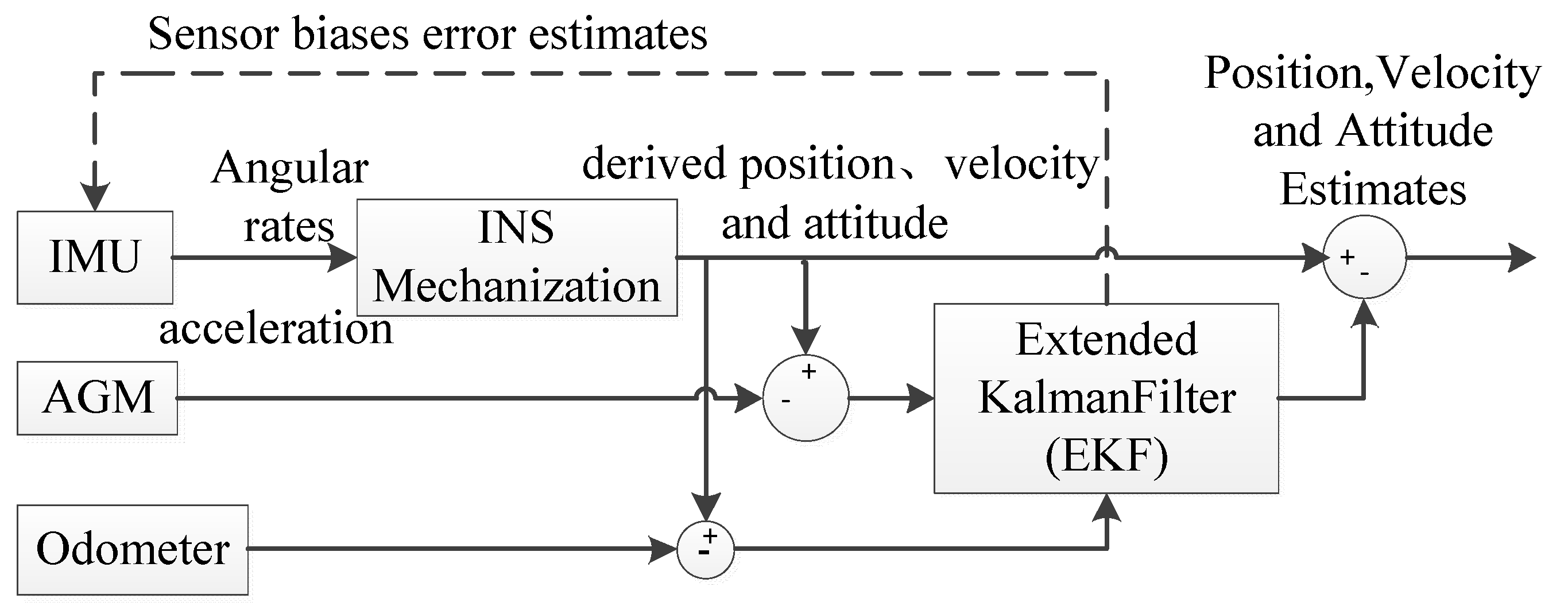
The principle of the pipeline centerline measurement and calculation based on MEMS-IMU with the adopted multi-sensor data fusion algorithm based on EKF is shown in
Figure 3. The IMU provides the acceleration and angular velocity, and the AGM and odometer provide the position and velocity information as a reference for correcting the IMU errors. An EKF is used to fuse the measurements from the IMU, odometer, and reference markers.
In centerline measurement and calculation, positive EKF filtering, interval smoothing filtering, and output correction are firstly adopted. Then data are counted from the end and a reverse filtering correction is carried out, finally the results of the two are fused and corrected to improve the measurement accuracy. After the above post-processing and calculation, the geographic coordinates of the pipeline centerline in-line inspector can be obtained, thus, the trajectory of the pipeline centerline can also be determined.
3. Description of Compensation Method
3.1. Description of Error Compensation Method
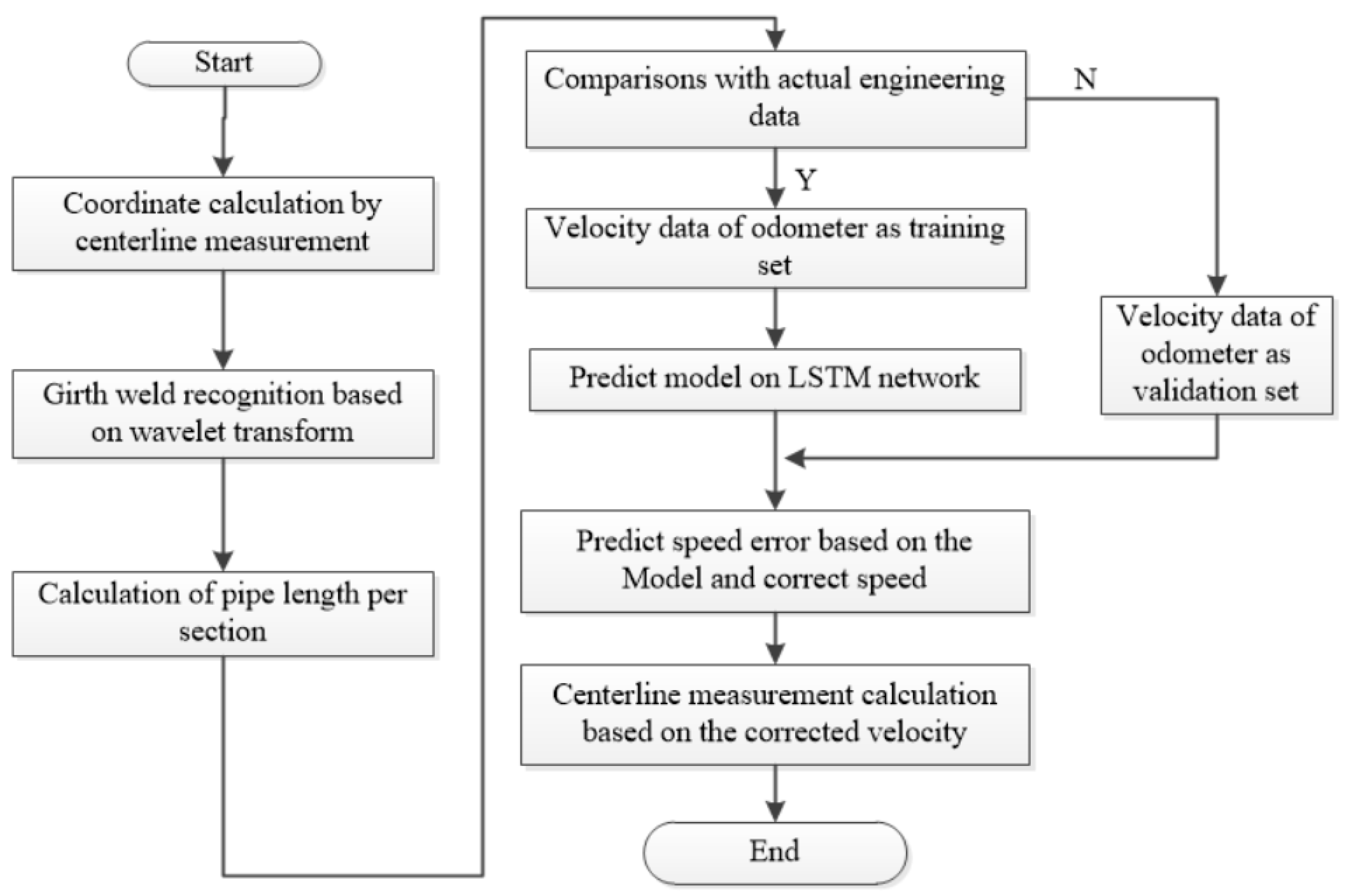
The odometer may slip at the girth weld when the pipeline centerline measurement system travels along the pipeline, thus resulting in inaccurate velocity information. As the velocity information at the slip of the girth weld cannot be used for correction, it is necessary to identify and estimate the velocity error that cannot work normally. According to the velocity error of the odometer when it works normally, the method-based AI can be used to build the model to predict the velocity error when it works abnormally. The specific flow chart is shown in
Figure 4. Firstly, the geographic coordinates of the pipeline centerline are obtained through centerline calculation using the IMU, AGM, and odometer. Secondly, it is necessary to identify the girth weld with acceleration based on the wavelet transform, and to identify the measured length of each pipe and bend according to the girth weld. Then the length is compared with the engineering data. If they are consistent, the odometer velocity is regarded as the training set, and if not, the odometer velocity is required to be predicted and corrected. Finally, the velocity error when the odometer slips can be corrected, and the corrected velocity can be used for coordinate calculation and centerline measurement.
The coordinate calculation process of the pipeline centerline is detailed in
Figure 3. Next sections are respectively girth weld identification and prediction model on LSTM network.
3.2. Girth Weld Identification of Pipeline Based on Wavelet Transformation
In general, a long-distance oil and gas transportation pipeline is constructed by connecting straight pipelines and other fittings (elbows, T fittings, and valves) [
24]. During the construction on site, in general, the straight pipelines are connected with other fittings using girth welds or flanges. In the pipeline construction, the welded joints are firm and durable, the strength of joints is greater, and the tightness of connection is higher, such that the weld connection is a universal and important means of connection for pipelines [
25]. The connection welds are called girth welds. The odometer slips easily at the weld, and, thus, it is necessary to identify the weld.
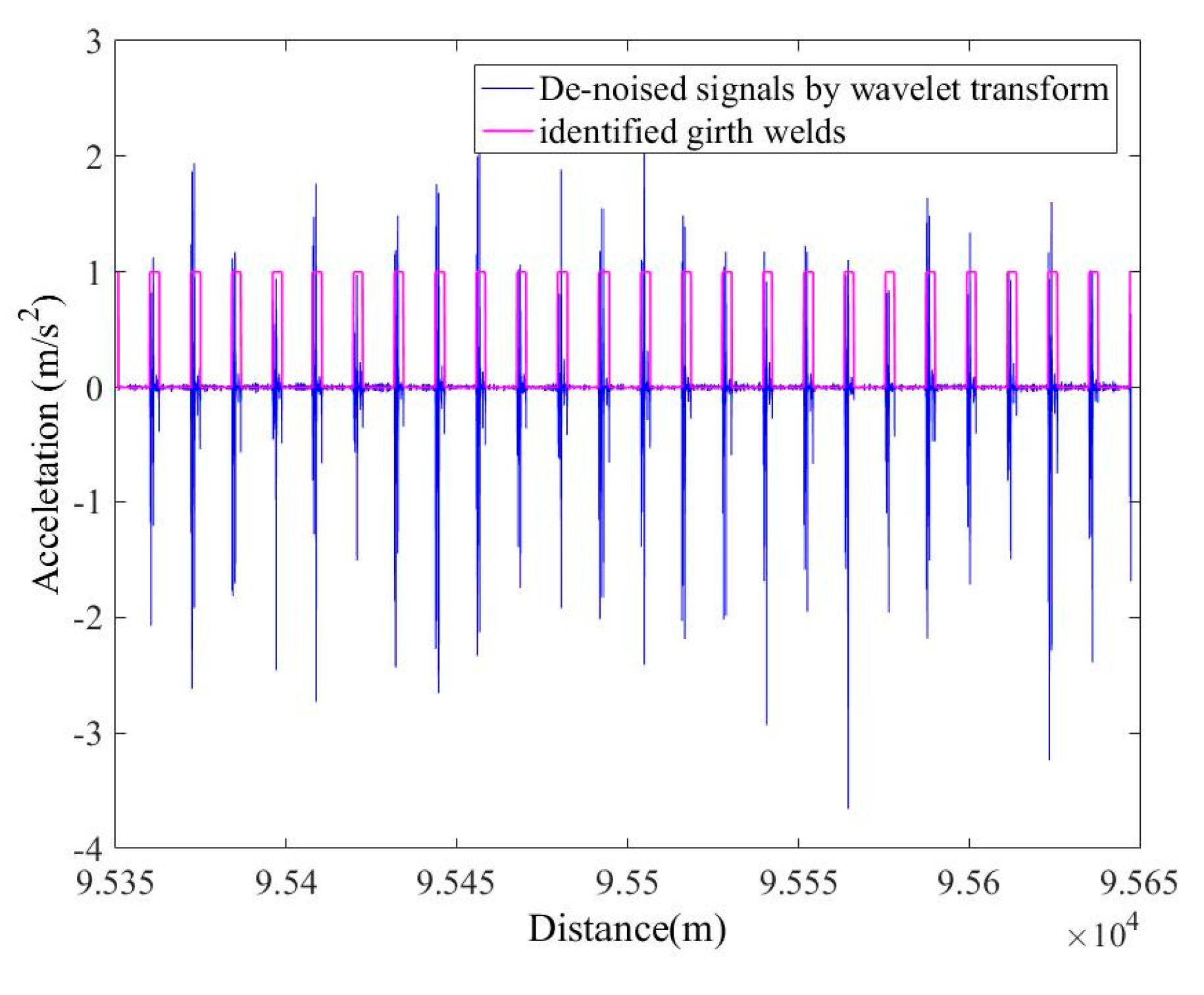
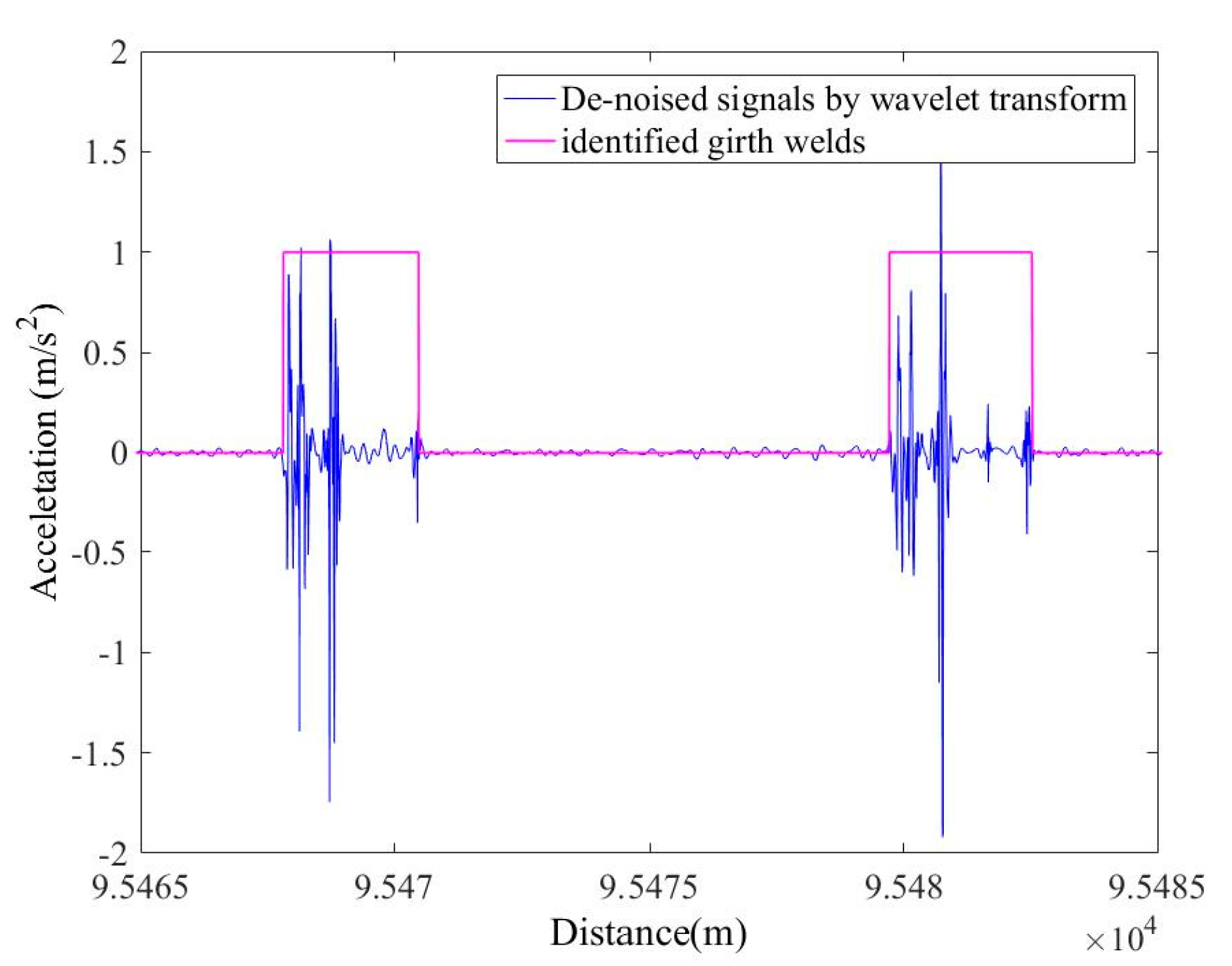
When the centerline in-line inspection system is running in the pipeline, the accelerometer of the inertial measurement unit is sensitive to any impulse and vibration against the in-line inspection system in the pipeline. When the in-line inspection system passes each girth weld, three orthogonal mounting accelerometers produce clear pink signals when they are vibrated. If these accelerometers signals are effectively detected, the girth weld information of the entire pipeline may be effectively identified for identifying the odometer slip. Owing to the noises produced by the in-line inspection system in the pipeline, it is difficult to treat the acceleration signals for the identification of the pipeline girth welds. Therefore, before the identification of the girth weld, it is necessary to do effective noise reduction against the acceleration data.
The wavelet transformation [
26,
27] is useful for eliminating the noises from transient signals and instantaneous signals, and it may restrict any interruption of high-frequency noises and effectively distinguish the high-frequency information from high-frequency noises [
28,
29]. The wavelet transform can be defined as follows:
where,
is called the scale factor, and
is the displacement factor,
are the wavelet coefficients.
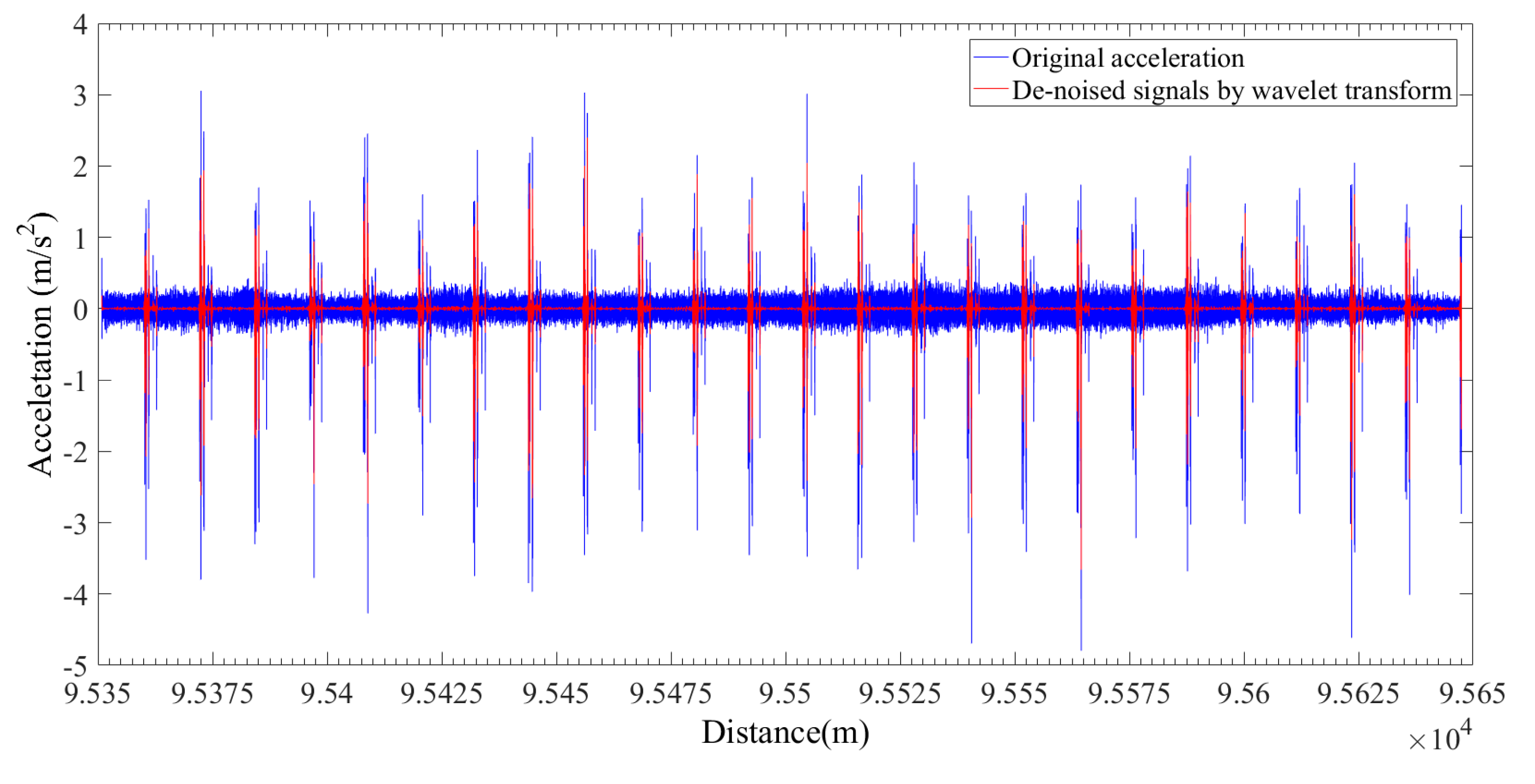
The actual acceleration signals in the IMU should be low-frequency or steady signals, while the noise signals are high-frequency signals. The orthogonal wavelet db8 is used to perform four-layer decomposition of the acceleration signals, then soft threshold quantization is used to treat the high frequencies of the decomposed signals for de-noising, and finally the low-frequency factors and high-frequency factors after the de-noising of each layer are reconstructed.
In this manner, the signals of each girth weld may be easily identified by use of the acceleration signals after the wavelet de-noising, which provides the basis for further proposal for the mapping of pipelines and the computation of the pipeline length. The measured length of each section of the pipeline is identified according to the girth weld, as compared with the engineering data. If the measured length is consistent with the engineering data, it is regarded as the training set.
3.3. Long Short-Term Memory (LSTM)
With the continuous development of deep learning technology, some deep learning models are gradually applied to the study of time series data. A recurrent neural network (RNN) is a kind of neural network with a self-cycling structure, which is very suitable for processing time series data in theory. RNNs are feedforward neural networks with time connection. On the basis of an ordinary multi-layer back propagation (BP) neural network, the RNN adds transverse connections among the hidden layer units. Using a weight matrix, the values of the neurons in the previous time series can be transferred to the current neurons, which allows the neural network to have memory function. The input information of a neuron includes not only the output of the previous layer of nerve cells, but also its own state in the previous channel. It has potential application in dealing with machine learning problems of time series. The disadvantage is that when the original RNN processes long sequences, gradient vanishing will occur. This phenomenon may even lead to a decrease in the accuracy rate as the number of hidden layers increase [
30,
31].
RNN has produced many variants, in which the LSTM network makes up for the problems of RNN gradient disappearance, gradient explosion, and insufficient long-term memory ability. The LSTM network has been applied in time series related research such as stock prediction, fault time series prediction, speech rsecognition, and so on. LSTM [
32,
33,
34] is an implementation of RNN, which adds memory units to each neuron unit of the hidden layer and combines short-term memory with long-term memory through gate control such that the memory information on the time series can be controlled. Each time the memory information is transmitted between the neurons of the hidden layer, several controllable gates (forgetting gate, input gate, candidate gate, and output gate) are used to control the memory and forgetting degree of the previous and current information, such that the LSTM network has the function of long-term memory. The smart design of the memory cell in the LSTM can effectively solve the problem of gradient vanishing in backpropagation and can be used to learn the input sequence with longer time steps to some extent.
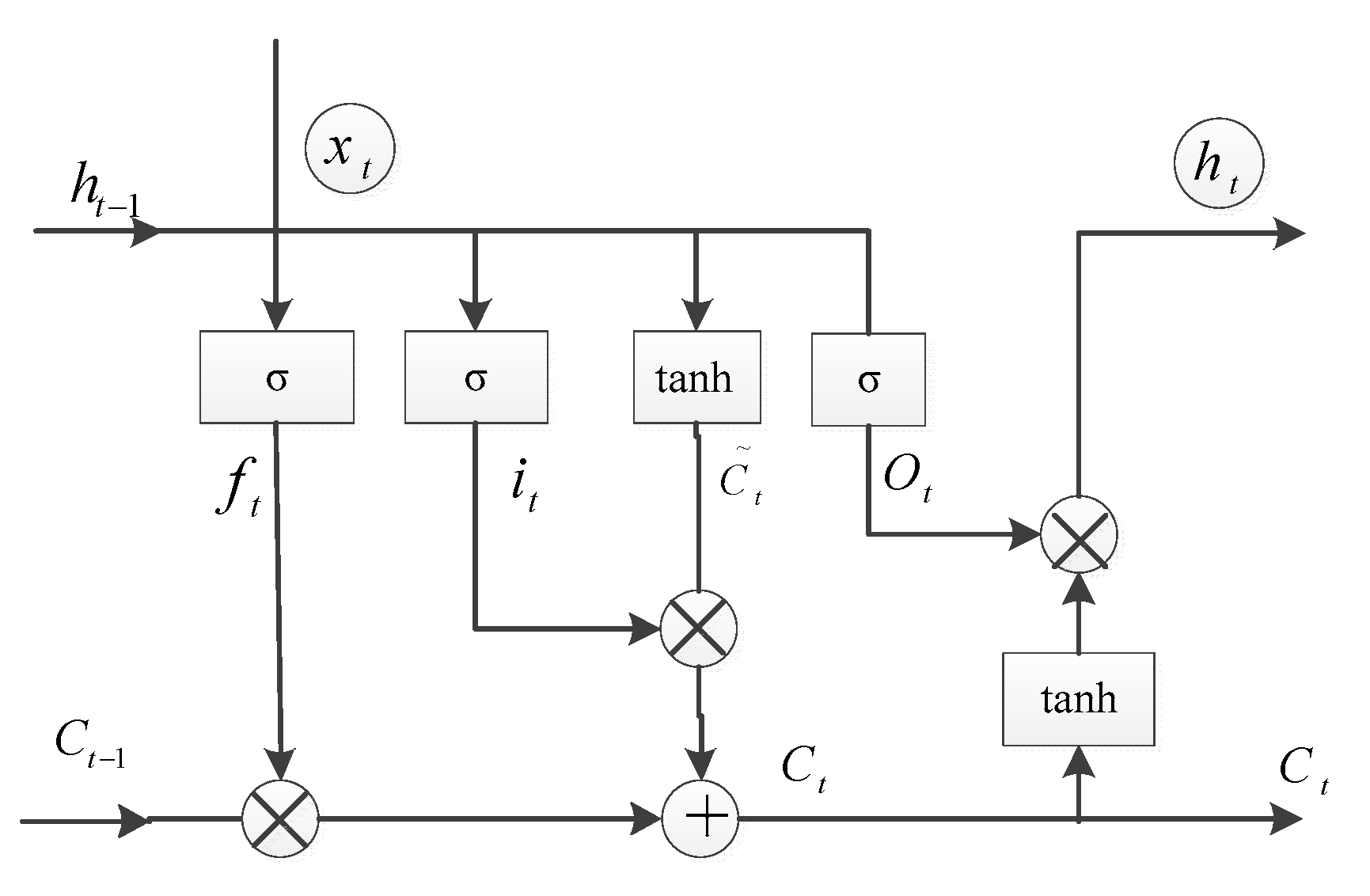
Because of the function of long-term memory networks, the LSTM structure is used in the method for predicting the odometer velocity when the odometer slips. The schematic of the LSTM is shown in
Figure 5, where
is a new input, its previous state is
and its previous output is
, the cell performs different operations using gates. The specific formula derivation of the LSTM is illustrated in Equations (13)–(18), where
is a sigmoid function.
The entire process of the LSTM neural network is divided into four steps: The first step is to identify the information that should be forgotten by neurons, which is composed of a sigmoid layer called the forget gate layer.
and
are the inputs, and each neuron state of
outputs a number between 0 and 1. A “1” indicates that it is completely retained, while a “0” indicates it is completely forgotten.
The second step is to determine the information that is to be stored in neurons. A sigmoid layer called the forget gate layer determines the value update, and then a
layer generates a new candidate value,
, which is added to the neuron state.
The third step is to update the previous state value,
to
, i.e., to multiply the old state by
to forget the information, and add
to obtain the new candidate value, which is measured by updating the value of each state.
The fourth step is to finally determine the output. The output is based on the state of the neurons. The output gate of the sigmoid layer is used to determine which part of the neuron state is required to be output. The neuron state is then passed through the tanh layer (normalizing the output value to −1~1) and multiplied by the output of the sigmoid threshold to determine the required output.
The LSTM can complete excellent learning and training in long-sequence scenes by virtue of its memory of sequences.
3.4. Prediction Model Based on LSTM
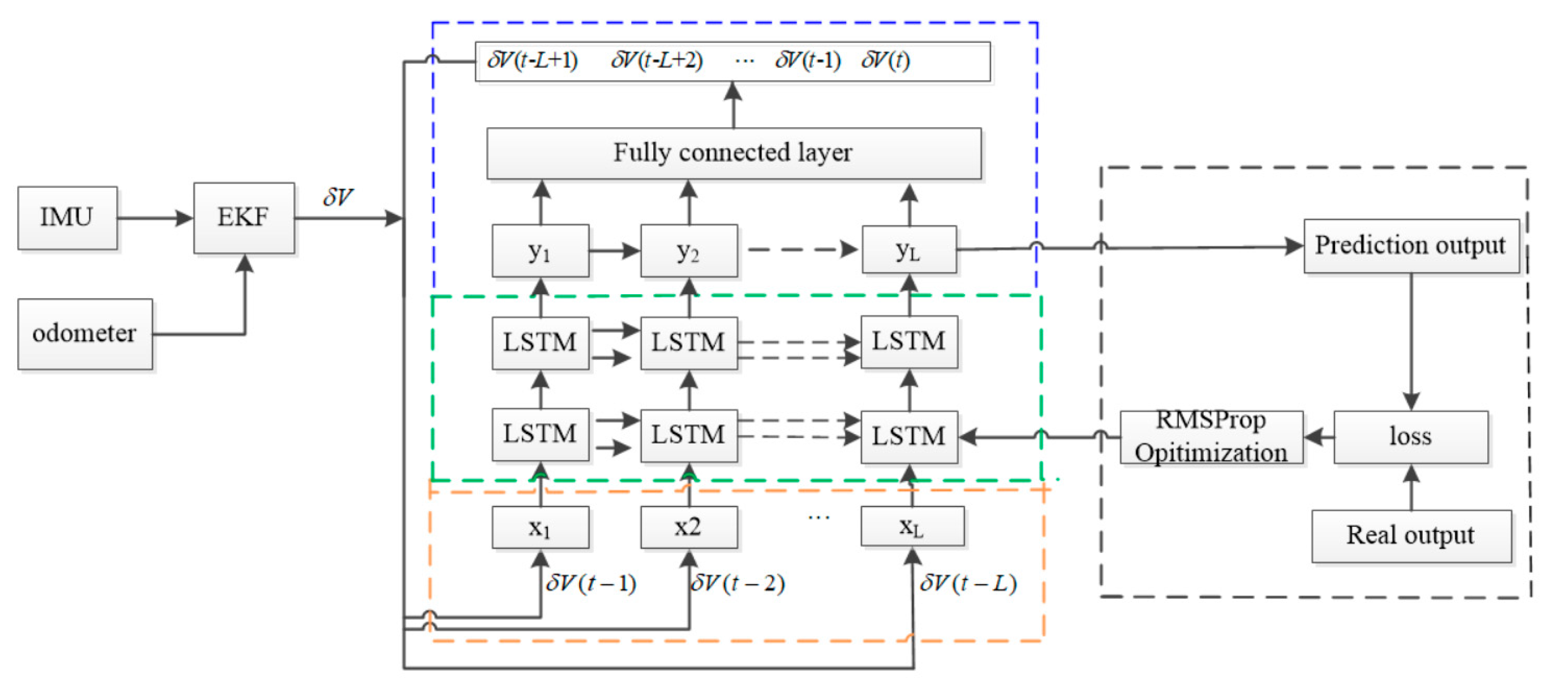
The velocity errors can be treated as time series data when the odometer works well, while the velocity and velocity errors change greatly when the odometer slips. When the odometer is working properly, the odometer provides the velocity as a reference to correct the IMU velocity, and the velocity is stored as a database that is used to build a training model based on LSTM to predict the velocity errors when odometer slips.
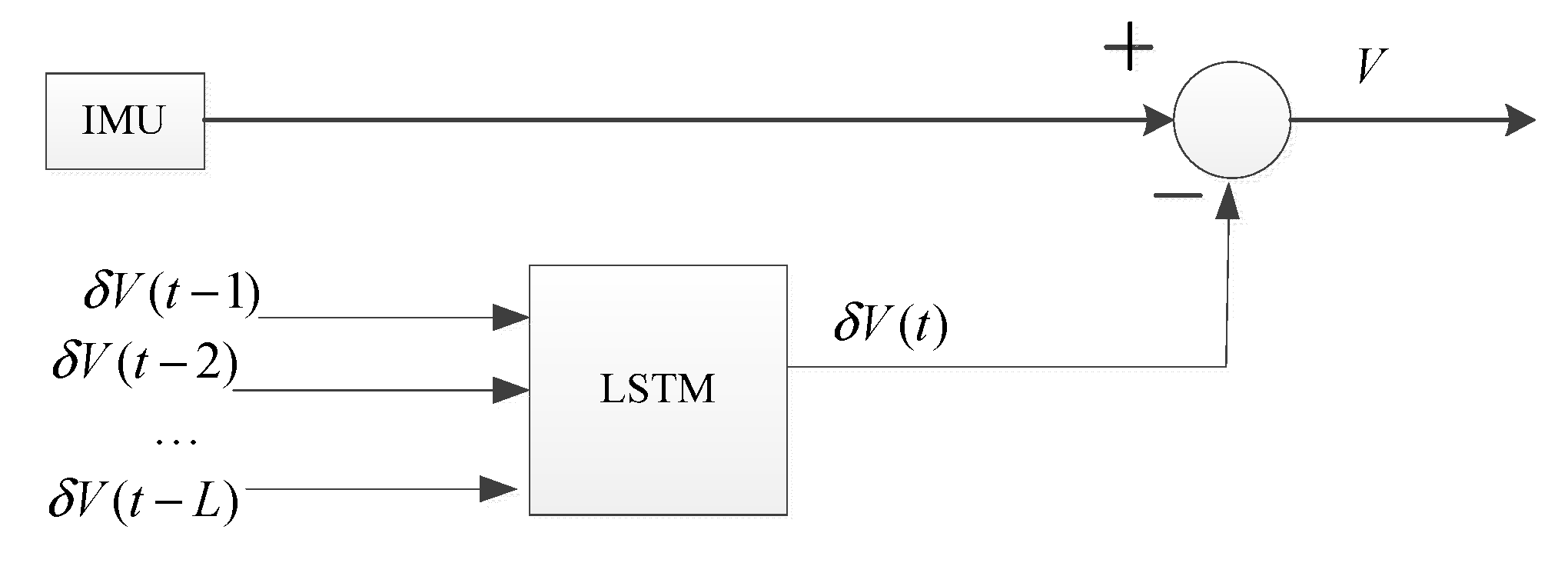
With the velocity errors of the past
moments as the input and the velocity error information of the current time as the output, a model is developed using an LSTM network when the odometer slips. The overall framework of the network model and the training process are shown in
Figure 6.
and
are the velocity and velocity errors, respectively.
is the velocity error at the current time,
are the past velocity errors.
Once the odometer slips, the velocity error can be obtained through prediction with the input velocity errors of the previous moments and the training model with an LSTM network. The prediction process when the odometer slips is shown in
Figure 7.
For the LSTM network to predict the velocity error at the first time point, it is necessary to input the velocity error of the first points as input, which is called the sequence length. Assuming that the velocity error data is , data preprocessing is needed. A single sample is a vector, the data set is sample processed, sample sets are obtained. In which .
After processing the original data, the time dimension of the sample expands, and the time dimension of the sample changes from one dimension to dimensions. The sample set is divided into a training set and a test set , . In order to accelerate the training speed and prediction accuracy, it is necessary to normalize the samples in the training set . Z-score is used as a normalization method and the normalized training set is expressed as .
The model includes four modules: Input layer, hidden layer, output layer, and network training. Processed data as input layer is entered in the LSTM network. The hidden layer module is composed of the LSTM network and the full connection layer. The computational process in LSTM is described in the previous section. After calculating in the LSTM network layer, the output of the hidden layer is expressed as , then through a full connection layer, the activate function chooses a linear activation function and finally outputs the one-dimensional velocity error data to be predicted.
Because of the large number of training samples, the mini-batch gradient descent algorithm is used to optimize the training process. Compared with the batch gradient descent, the small batch gradient descent selects one batch size sample each time to update the parameters, which saves the operation cost and improves the operation speed. The selection of learning rate has an important impact on the performance of the model and is often the most difficult parameter to debug. In order to reduce the difficulty of parameter debugging and optimize the performance of the model, the hyperparametric optimization algorithm is used to optimize the learning rate. The commonly used adaptive learning rate optimization algorithms are Adaptive Gradient Algorithm (AdaGrad), Root Mean Square Prop(RMSProp), Adaptive Moment Estimation(Adam), etc. RMSProp algorithm is chosen as the model super parametric optimization algorithm. The specific parameters for network training are as follows, the batch size is set as 1000, and the step is 15. Activation function is Rectified Linear Units(RELU). Number of hidden nodes is fifteen. The learning rate is set as 0.05.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}