Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
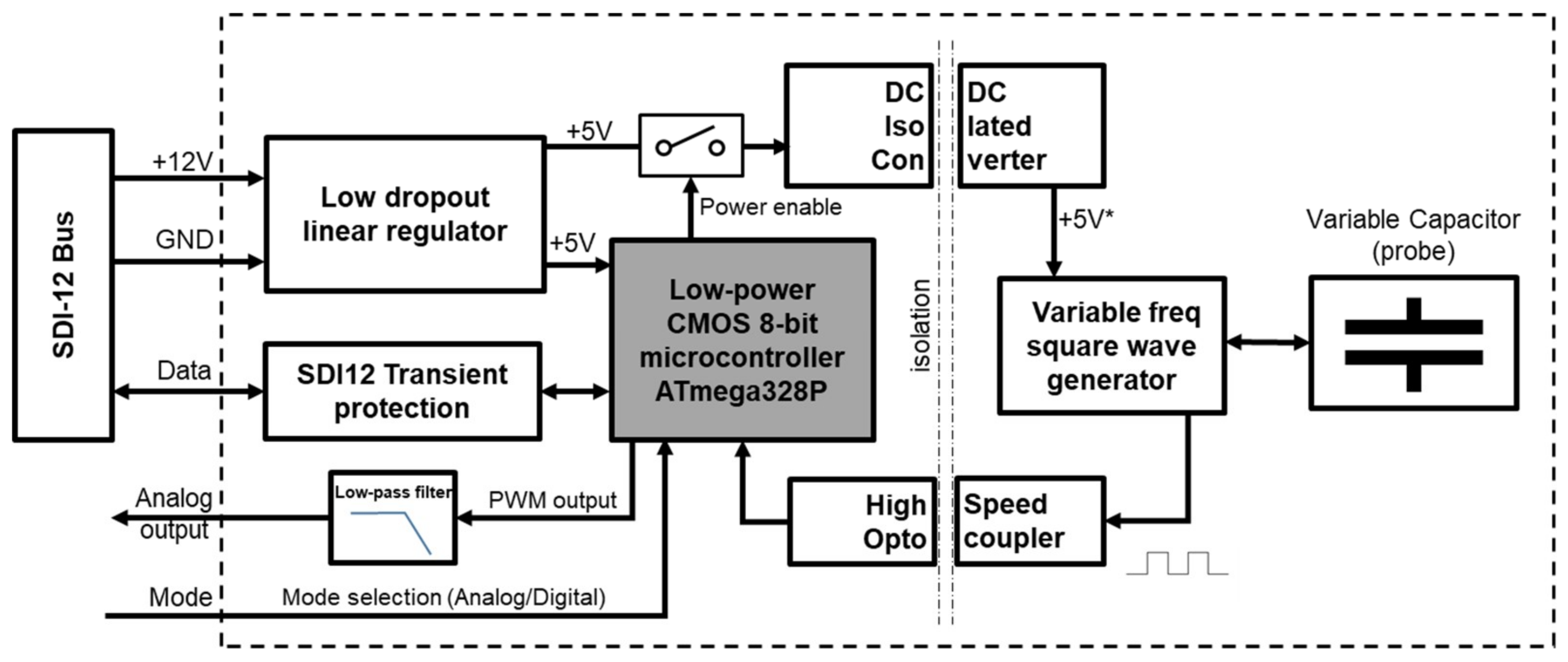
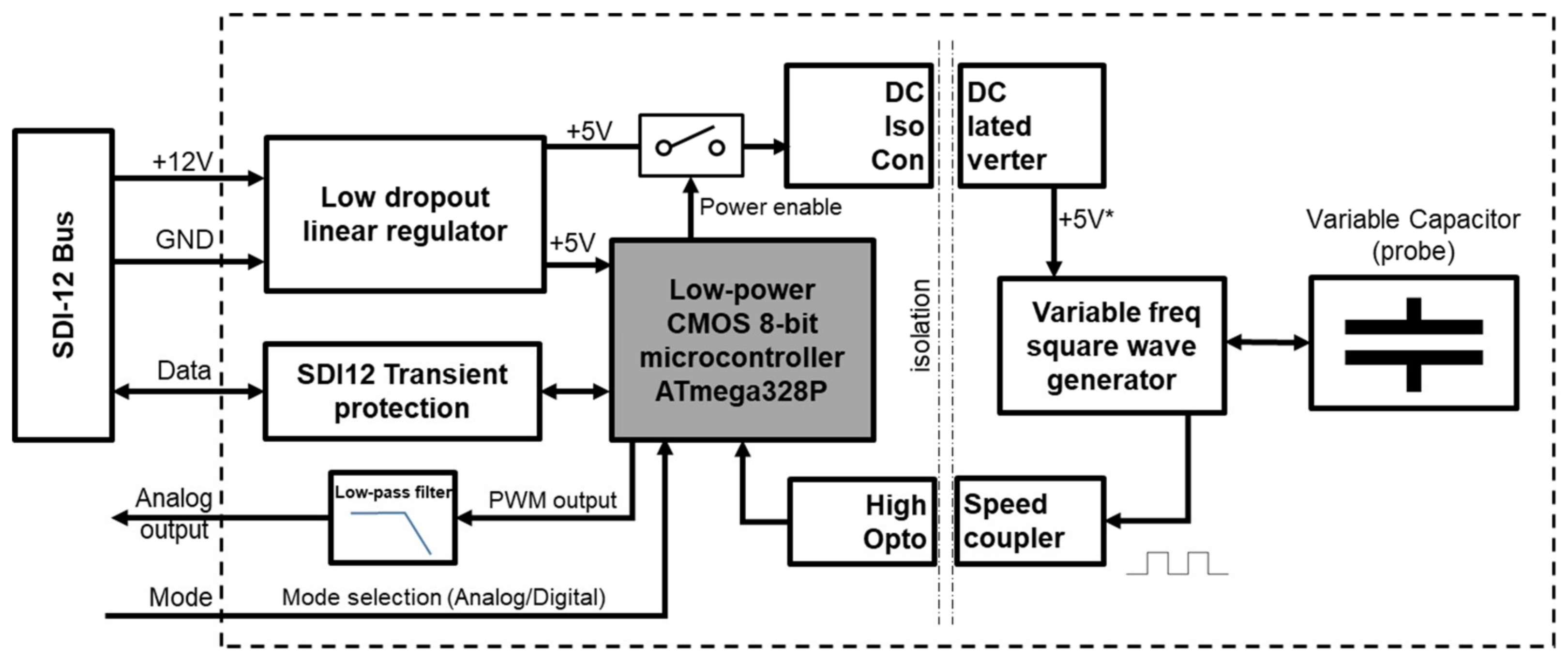
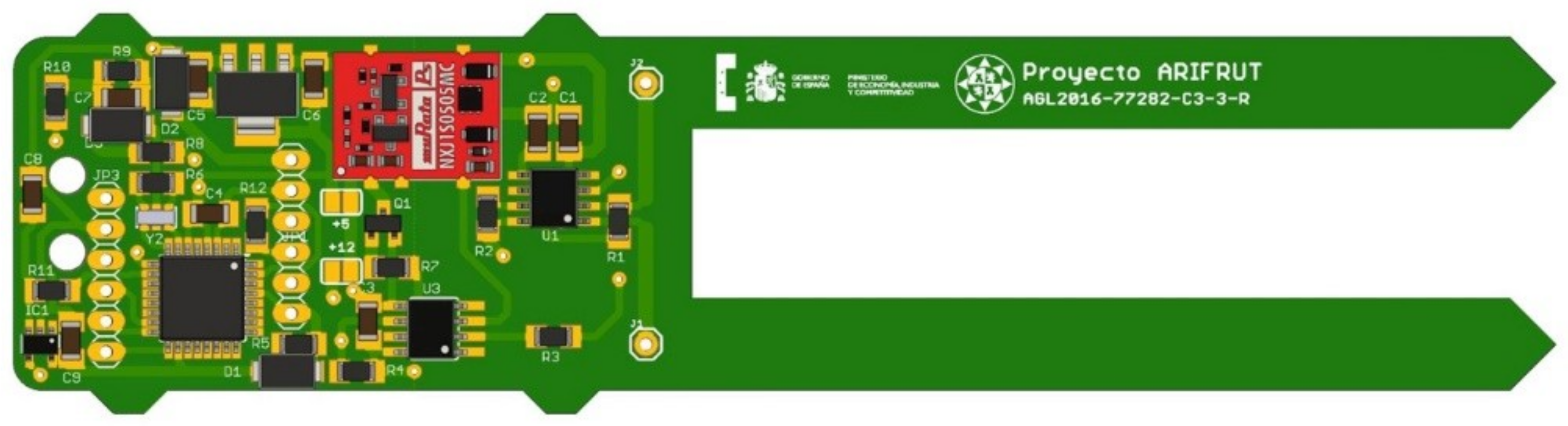
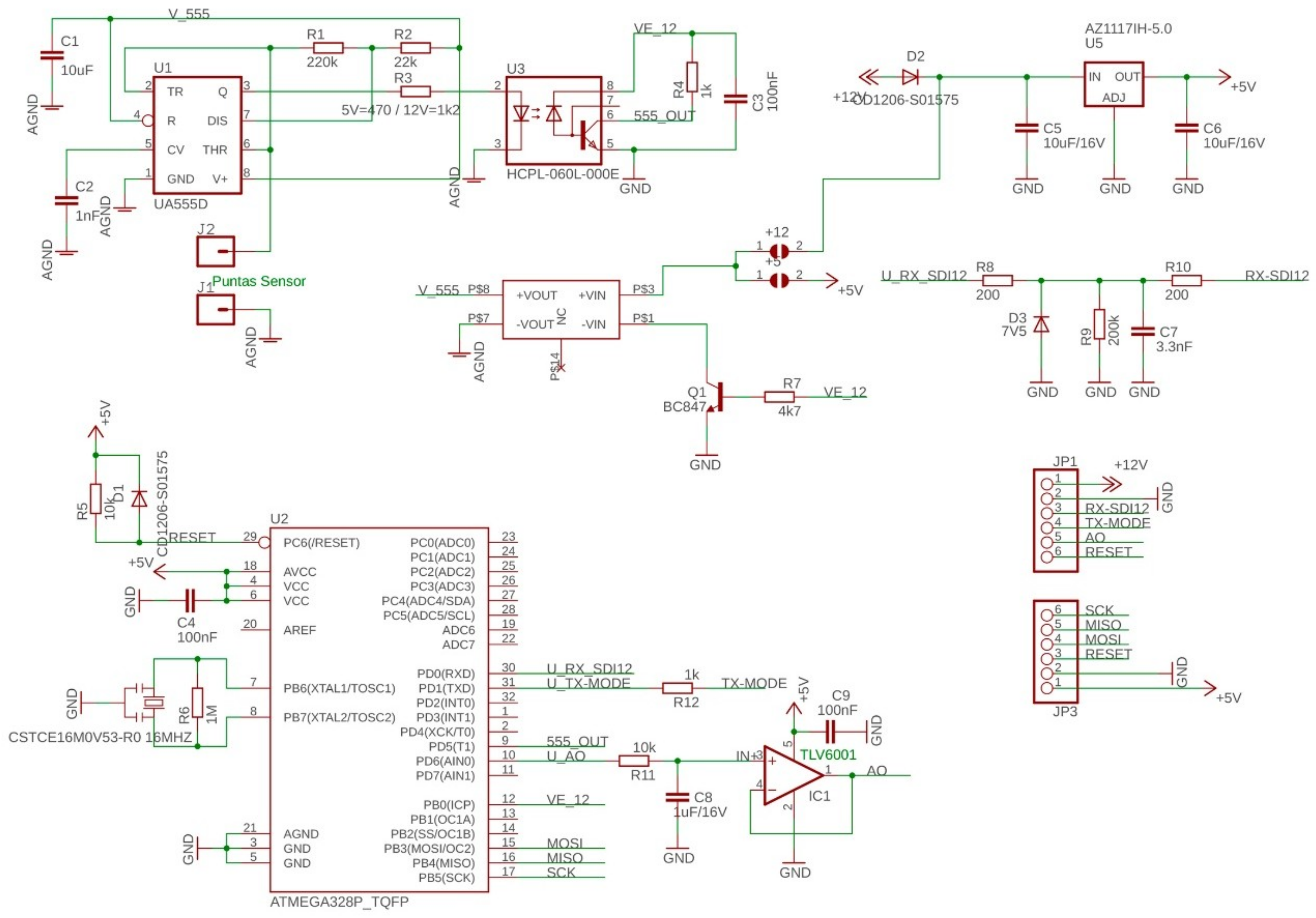
2.1. Electronic Design of the Sensor
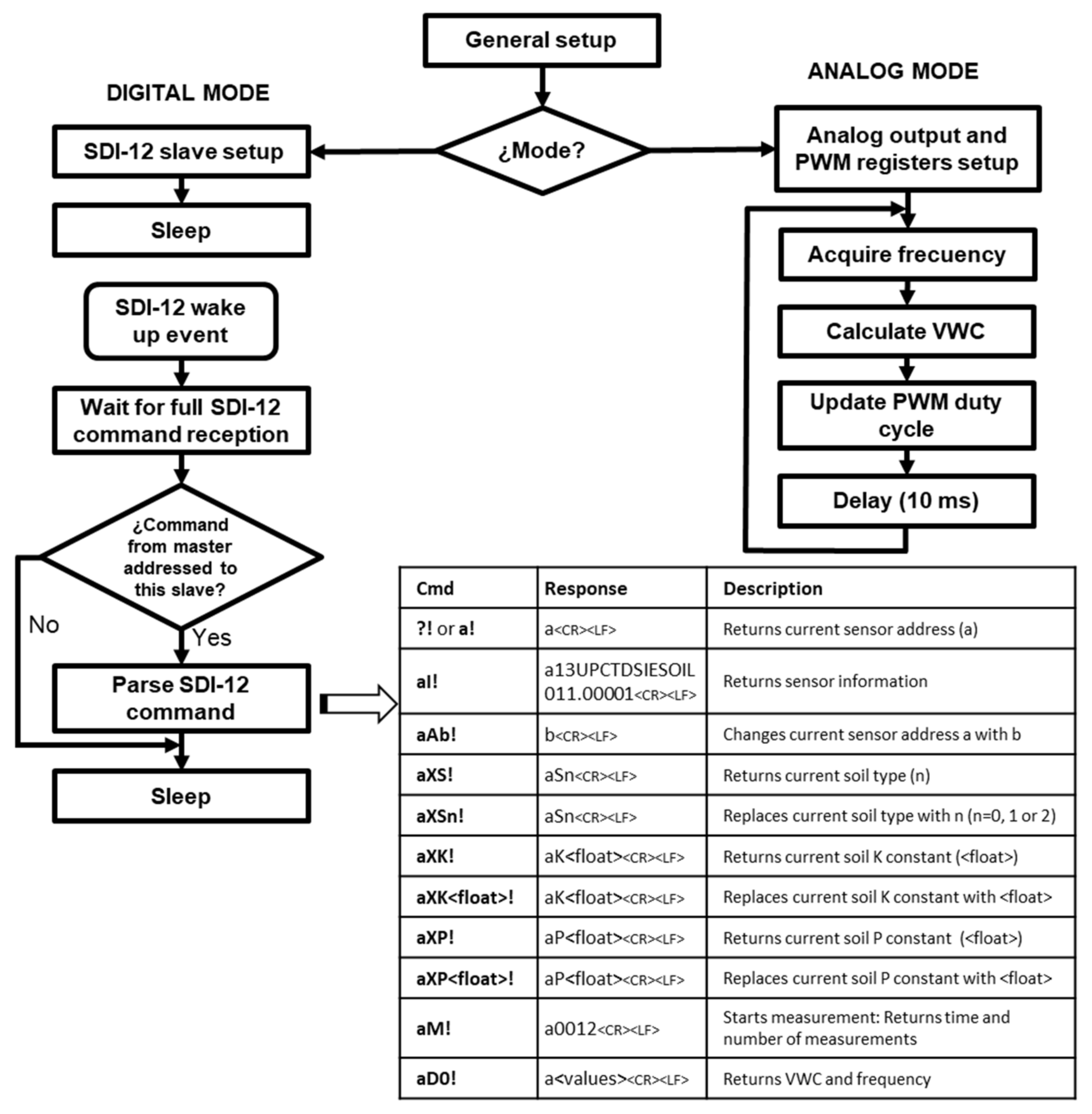
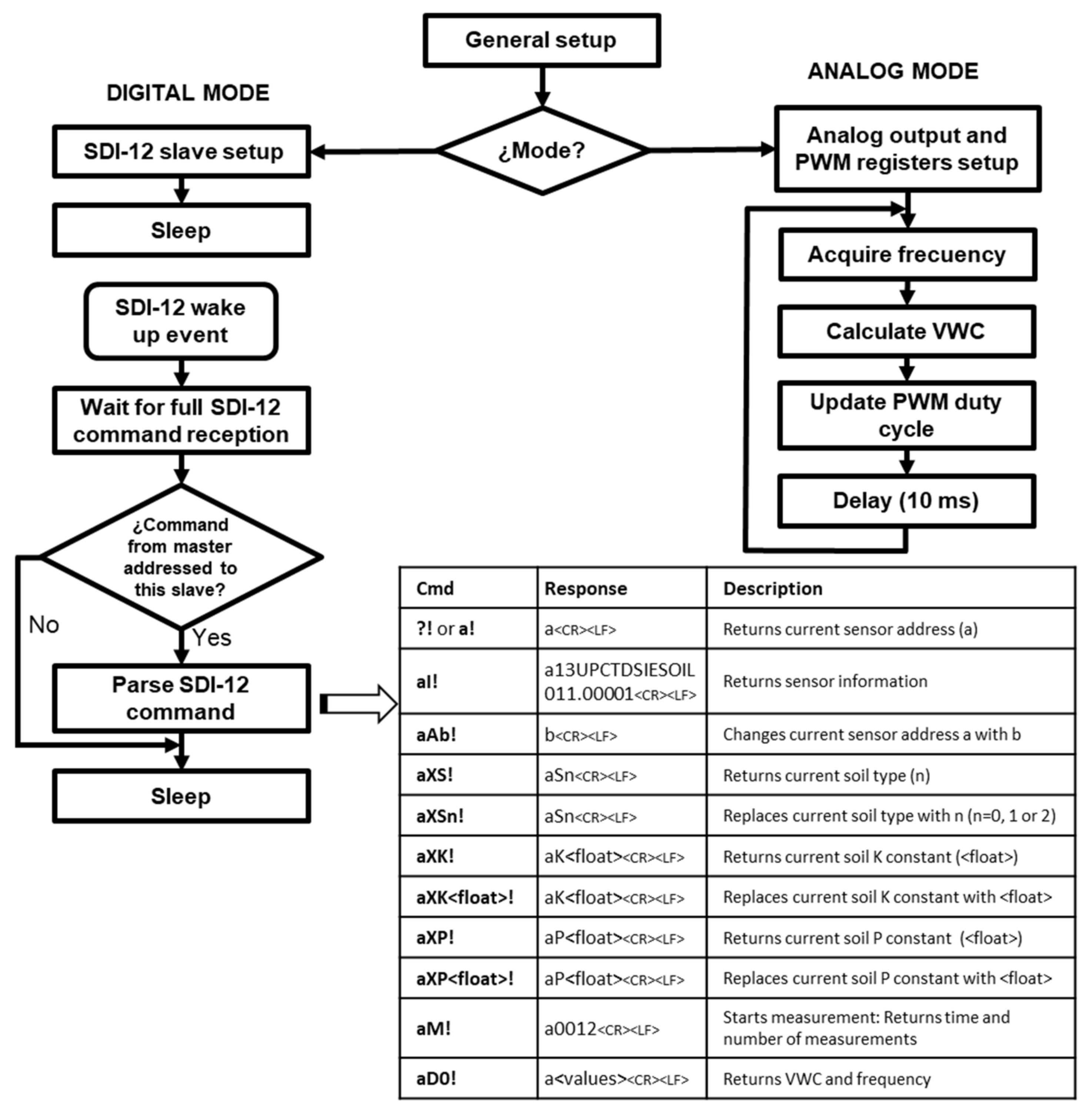
2.2. Software Design of the Sensor
2.3. Experimental Settings
2.3.1. Laboratory Experiments
2.3.2. Experimental Plot Evaluation
3. Results and Discussion
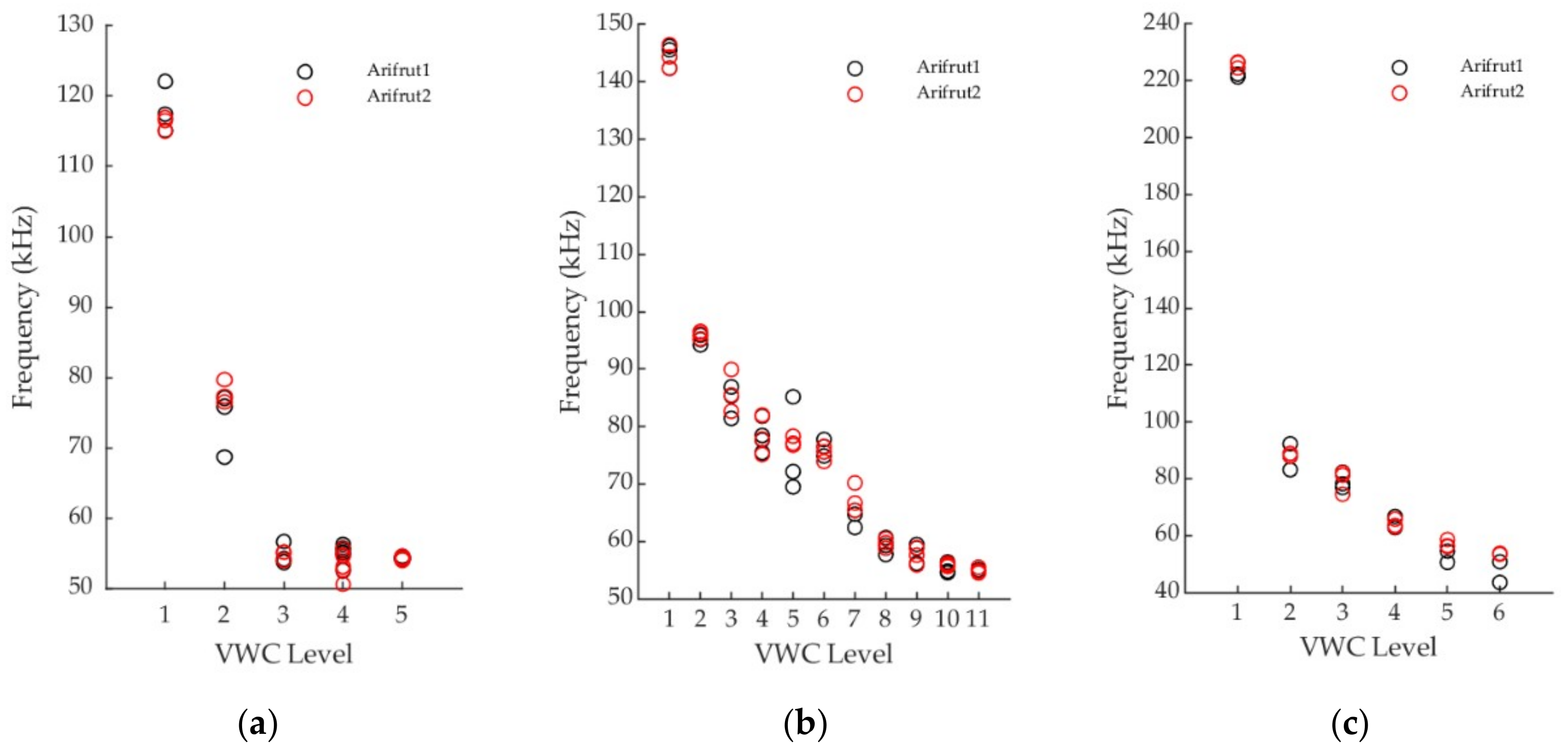
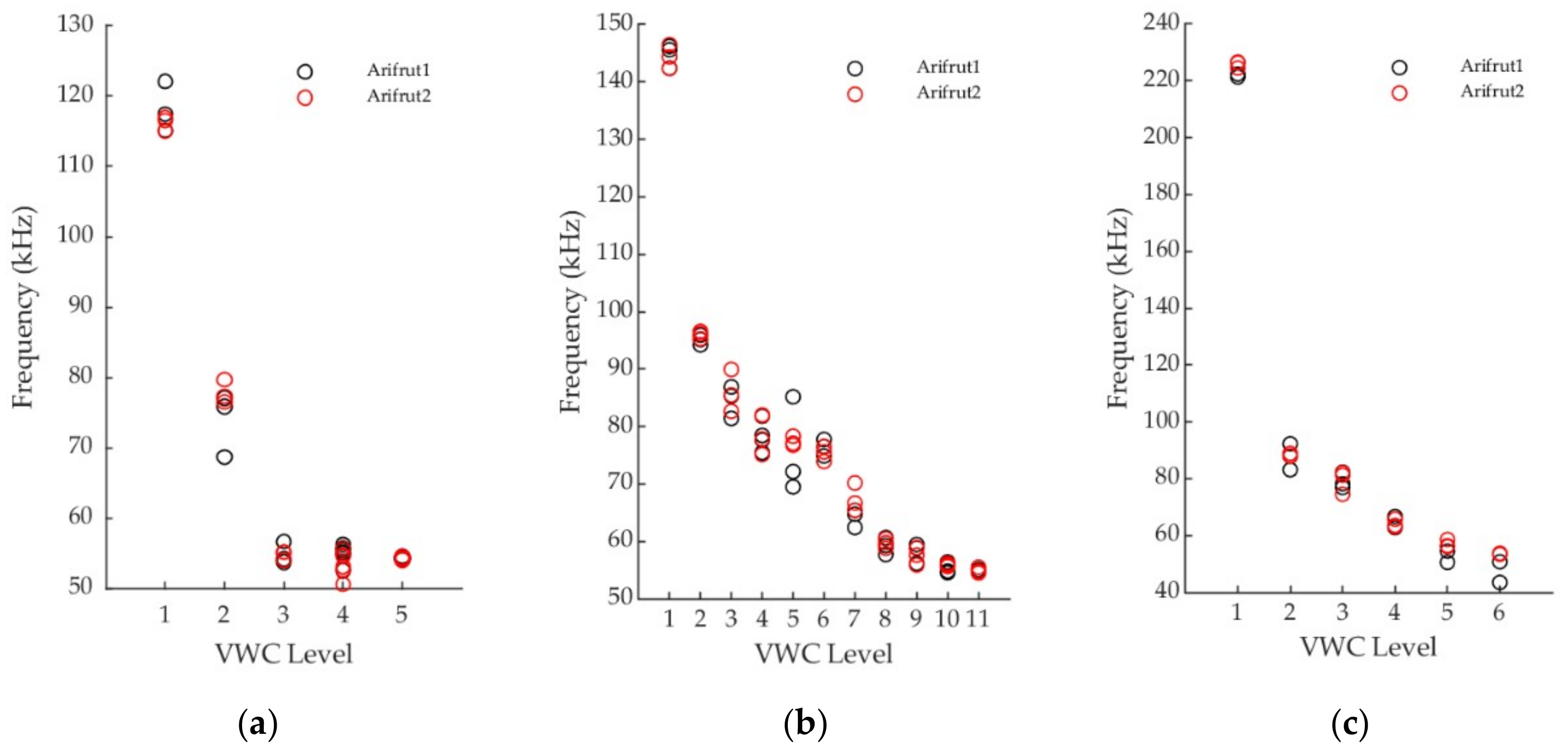
3.1. Sensor Variability Study
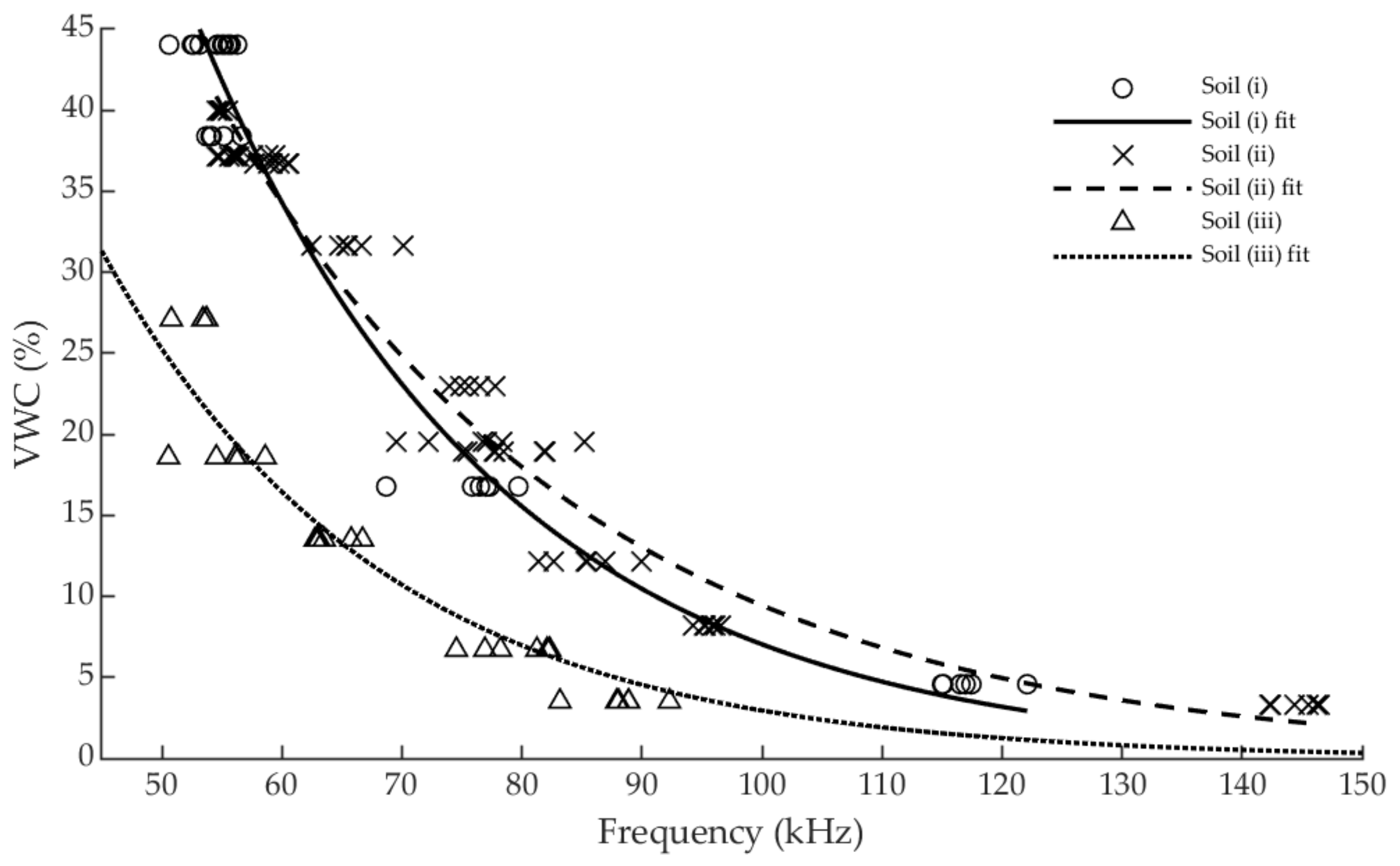
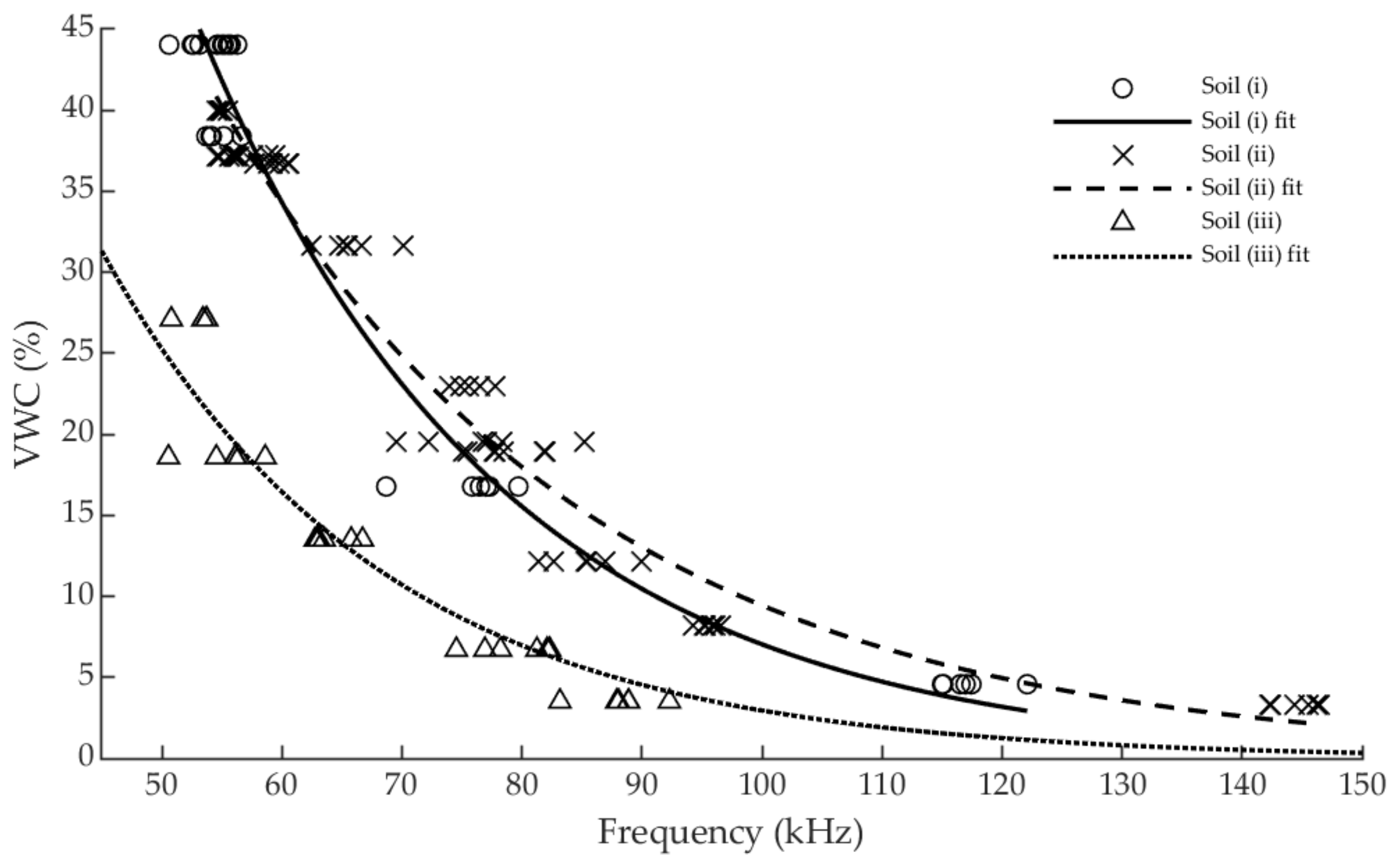
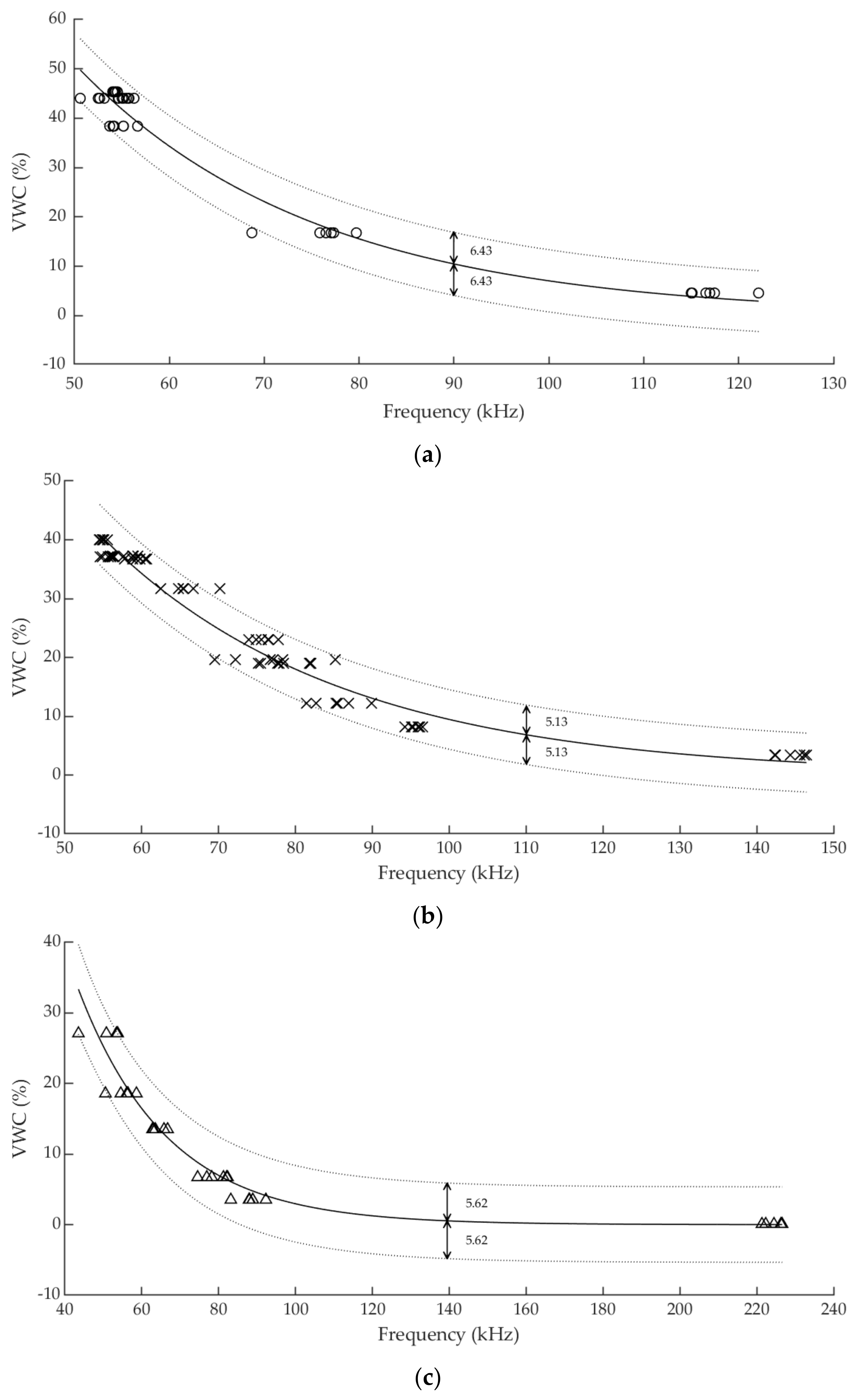
3.2. Sensor Calibration
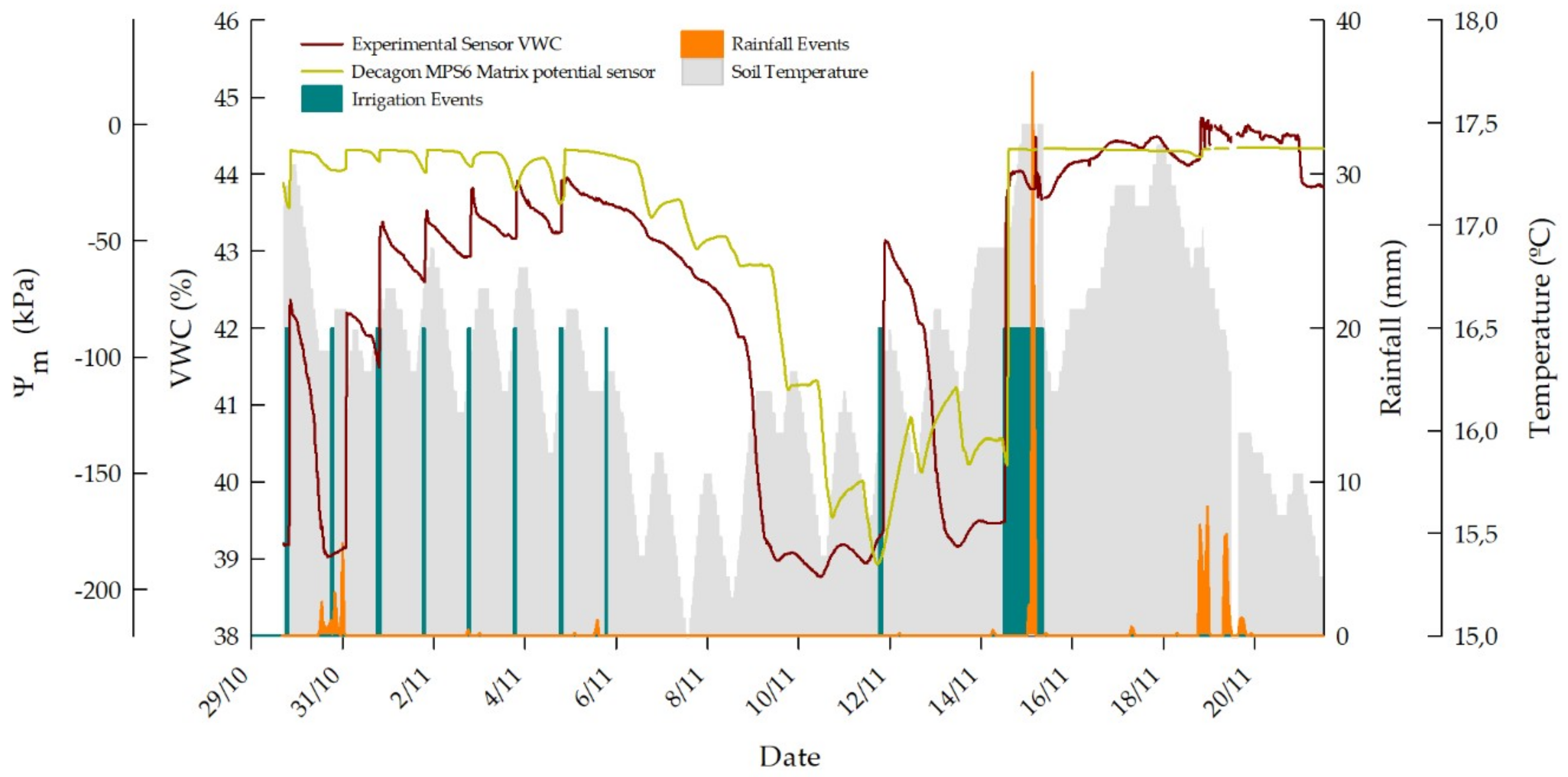
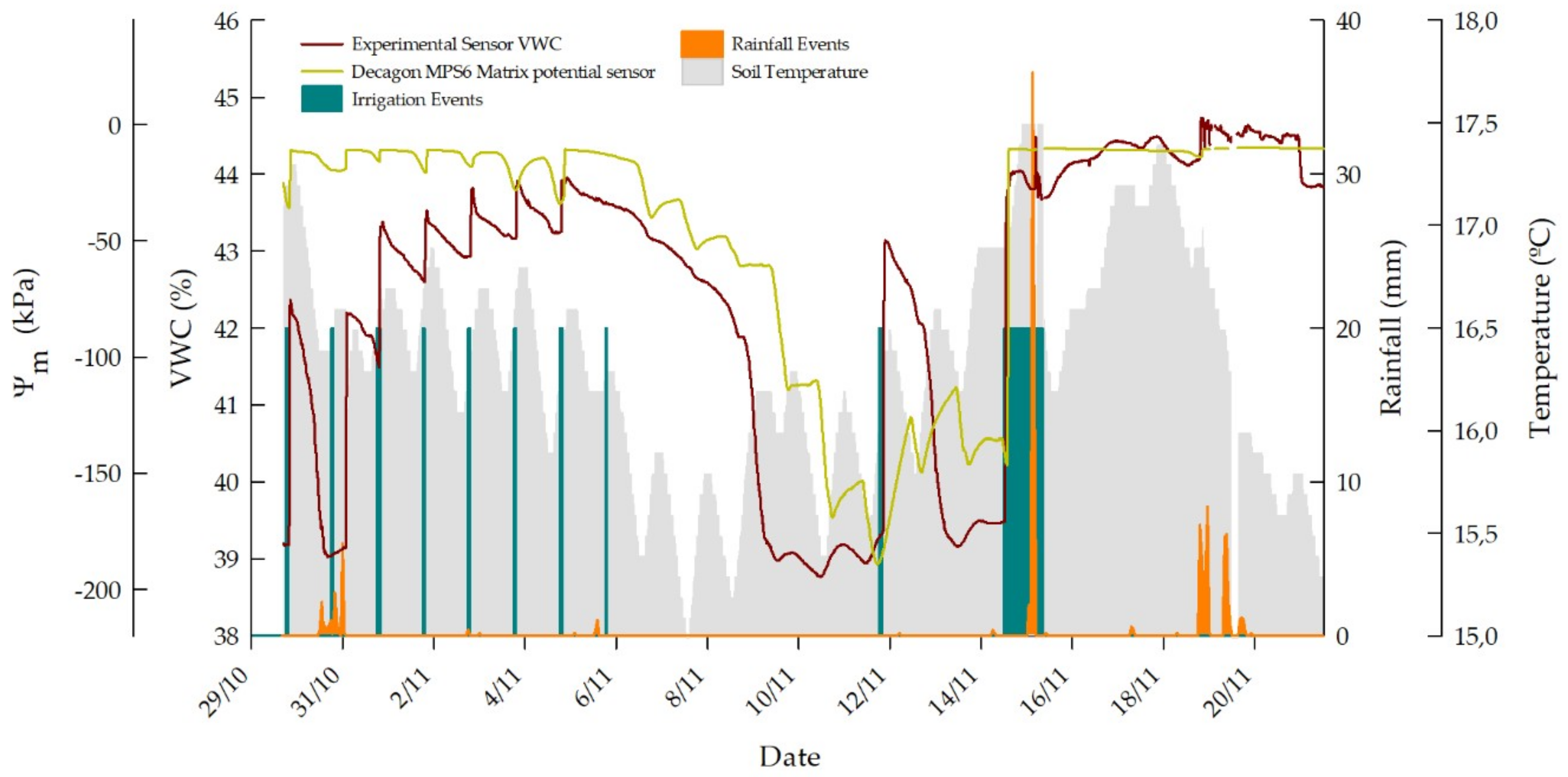
3.3. Sensor Experimental Validation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Gil, E. Situación Actual y Posibilidades de la Agricultura de Precisión; Escuela Superior de Agricultura de Barcelona: Barcelona, Spain, 2010. [Google Scholar]
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Bahr, C.; Forristal, D.; Fountas, S.; Gil, E.; Grenier, G.; Hoerfarter, R.; Jonsson, A.; Jung, A.; Kempenaar, C.; Lokhorst, K.; et al. EIP-AGRI Focus Group Precision Farming—Final Report; European Innovation partnership for Agricultural Productivity and Sustainability (EIP AGRI): Brussels, Belgium, 2015. [Google Scholar]
- Fereres, E.; Soriano, M.A. Deficit irrigation for reducing agricultural water use. J. Exp. Bot. 2007, 58, 147–159. [Google Scholar] [CrossRef] [PubMed]
- Bittelli, M. Measuring soil water content: A review. Horttechnology 2011, 21, 293–300. [Google Scholar] [CrossRef]
- SU, S.L.; Singh, D.N.; Baghini, M.S. A critical review of soil moisture measurement. Measurement 2014, 54, 92–105. [Google Scholar] [CrossRef]
- Martin, E.C. Methods of Measuring for Irrigation Scheduling—WHEN; College of Agriculture and Life Sciences, University of Arizona at Tucson: Tucson, AZ, USA, 2014. [Google Scholar]
- ASTM D2216-98. Standard Test Method for Laboratory Determination of Water (Moisture) Content of Soil and Rock by Mass; ASTM International: West Conshohocken, PA, USA, 1998. [Google Scholar]
- Cobos, D.R.; Chambers, C. Calibrating ECH2O Soil Moisture Sensors; Application Note; Decagon Devices Inc.: Pullman, WA, USA, 2010. [Google Scholar]
- Elder, A.N.; Rasmussen, T.C. Neutron Probe Calibration in Unsaturated Tuff. Soil Sci. Soc. Am. J. 1994, 58, 1301–1307. [Google Scholar] [CrossRef]
- Kodikara, J.; Rajeev, P.; Chan, D.; Gallage, C. Soil moisture monitoring at the field scale using neutron probe. Can. Geotech. J. 2014, 51, 332–345. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Smith, D.W.; Fityus, S.G. The effect of a gap between the access tube and the soil during neutron probe measurements. Aust. J. Soil Res. 2003, 41, 151–164. [Google Scholar] [CrossRef]
- Wenner, F. A Method of Measuring Earth Resistivity. Natl. Bur. Stand. 1915, 12, 478–496. [Google Scholar] [CrossRef]
- Zhu, J.J.; Kang, H.Z.; Gonda, Y. Application of Wenner Configuration to Estimate Soil Water Content in Pine Plantations on Sandy Land. Pedosphere 2007, 17, 801–812. [Google Scholar] [CrossRef]
- Rhoades, J.D. Electrical Conductivity Methods for Measuring and Mapping Soil Salinity. In Advances in Agronomy; Sparks, D.L., Ed.; USDA: Riverside, CA, USA, 1993; pp. 201–251. ISBN 978-0-12-000749-3. [Google Scholar]
- Ridley, A.M.; Burland, J.B. A new instrument for the measurement of soil moisture suction. Géotechnique 1993, 43, 321–324. [Google Scholar] [CrossRef]
- Richards, L.A. Soil Moisture Tensiometer Material and Construction. Soil Sci. Soc. Am. J. 1942, 53, 241–248. [Google Scholar] [CrossRef]
- Richards, L.A. Moisture Retention by Some Irrigated Soils as Related to Soil-Moisture Tension. J. Agric. Res. 1944, 69, 215–235. [Google Scholar]
- Tarara, J.M.; Ham, J.M. Measuring Soil Water Content in the Laboratory and Field with Dual-Probe Heat-Capacity Sensors. Agron. J. 1997, 89, 535–542. [Google Scholar] [CrossRef]
- Jorapur, N.; Palaparthy, V.S.; Sarik, S.; John, J.; Baghini, M.S.; Ananthasuresh, G.K. A low-power, low-cost soil-moisture sensor using dual-probe heat-pulse technique. Sens. Actuators A Phys. 2015, 233, 108–117. [Google Scholar] [CrossRef]
- Kamai, T.; Kluitenberg, G.J.; Hopmans, J.W. A Dual-Probe Heat-Pulse Sensor with Rigid Probes for Improved Soil Water Content Measurement. Soil Sci. Soc. Am. J. 2015, 79, 1059–1072. [Google Scholar] [CrossRef]
- Alwis, L.; Sun, T.; Grattan, K.T.V. Optical fibre-based sensor technology for humidity and moisture measurement: Review of recent progress. Measurement 2013, 46, 4052–4074. [Google Scholar] [CrossRef]
- Kaleita, A.L.; Tian, L.F.; Hirschi, M.C. Relationship between soil moisture content and soil surface reflectance. Trans. Am. Soc. Agric. Eng. 2005, 48, 1979–1986. [Google Scholar] [CrossRef]
- Alessi, R.S.; Prunty, L. Soil-water Determination Using Fiber Optics. Soil Sci. Soc. Am. J. 1986, 50, 860–863. [Google Scholar] [CrossRef]
- Kelleners, T.J.; Robinson, D.A.; Shouse, P.J.; Ayars, J.E.; Skaggs, T.H. Frequency Dependence of the Complex Permittivity and Its Impact on Dielectric Sensor Calibration in Soils. Soil Sci. Soc. Am. J. 2005, 69, 67–76. [Google Scholar]
- Kargas, G.; Soulis, K.X. Performance analysis and calibration of a new low-cost capacitance soil moisture sensor. J. Irrig. Drain. Eng. 2011, 138, 632–641. [Google Scholar] [CrossRef]
- Mittelbach, H.; Lehner, I.; Seneviratne, S.I. Comparison of four soil moisture sensor types under field conditions in Switzerland. J. Hydrol. 2012, 430–431, 39–49. [Google Scholar] [CrossRef]
- Blonquist, J.M.; Jones, S.B.; Robinson, D.A. A time domain transmission sensor with TDR performance characteristics. J. Hydrol. 2005, 314, 235–245. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Oberdörster, C.; Vereecken, H. Evaluation of a low-cost soil water content sensor for wireless network applications. J. Hydrol. 2007, 344, 32–42. [Google Scholar] [CrossRef]
- Shukla, A.; Panchal, H.; Mishra, M.; Srivastava, H.S.; Patel, P.; Shukla, A.K. Soil moisture estimation using gravimetric technique and FDR probe technique: A comparative analysis. Am. Int. J. Res. Form. Appl. Nat. Sci. 2014, 8, 89–92. [Google Scholar]
- Seyfried, M.S.; Grant, L.E.; Du, E.; Humes, K. Dielectric Loss and Calibration of the Hydra Probe Soil Water Sensor. Vadose Zone J. 2005, 4, 1070–1079. [Google Scholar] [CrossRef]
- Ponizovsky, A.A.; Chudinova, S.M.; Pachepsky, Y.A. Performance of TDR calibration models as affected by soil texture. J. Hydrol. 1999, 218, 35–43. [Google Scholar] [CrossRef]
- Bogena, H.; Huisman, J.; Schilling, B.; Weuthen, A.; Vereecken, H. Effective Calibration of Low-Cost Soil Water Content Sensors. Sensors 2017, 17, 208. [Google Scholar] [CrossRef] [PubMed]
- Bellingham, K. The Stevens Hydra Probe Inorganic Soil Calibrations; Stevens Water Monitoring Systems Inc.: Portland, OR, USA, 2007. [Google Scholar]
- TDR200-Based Time-Domain Reflectometry System Instruction Manual. Revision 4/17; Campbell Scientific, Inc.: Loughborough, UK, 2016.
- Rezaei, M.; Ebrahimi, E.; Naseh, S.; Mohajerpour, M. A new 1.4-GHz soil moisture sensor. Meas. J. Int. Meas. Confed. 2012, 45, 1723–1728. [Google Scholar] [CrossRef]
- Zazueta, F.S.; Xin, J. Soil Moisture Sensors; Florida Cooperative Extension Service: Gainesville, FL, USA, 1994. [Google Scholar]
- Muñoz-Carpena, R.; Shukla, S.; Morgan, K. Field Devices for Monitoring Soil Water Content; Florida Cooperative Extension Service, Institute of Food and Agricultural Sciences, University of Florida: Gainesville, FL, USA, 2004. [Google Scholar]
- Oliver Riera, B. Permittivity Measurements using Coaxial Probes. Bachelor’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2016. [Google Scholar]
- Von Hippel, A.R. Dielectrics and Waves, 2nd ed.; Artech House: Cambridge, MA, USA, 1954. [Google Scholar]
- Houtz, D.A.; Gu, D.; Walker, D.K. An Improved Two-Port Transmission Line Permittivity and Permeability Determination Method With Shorted Sample. IEEE Trans. Microw. Theory Tech. 2016, 64, 1–8. [Google Scholar] [CrossRef]
- Stuchly, M.A.; Stuchly, S.S. Coaxial Line Reflection Methods for Measuring Dielectric Properties of Biological Substances at Radio and Microwave Frequencies-A Review. IEEE Trans. Instrum. Meas. 1980, 29, 176–183. [Google Scholar] [CrossRef]
- Zajíček, R.; Oppl, L.; Vrba, J. Broadband Measurement of Complex Permittivity Using Reflection Method and Coaxial Probes. Radioengineering 2008, 17, 14–19. [Google Scholar]
- Venkatesh, M.S.; Raghavan, G.S.V. An overview of dielectric properties measuring techniques. Can. Biosyst. Eng. 2005, 47, 15–30. [Google Scholar]
- Baker-Jarvis, J. Transmission/Reflection and Short Circuit line Permittivity Measurements; NIST Tech. Note; NIST: Gaithersburg, MD, USA, 1990; p. 1341. [Google Scholar]
- Baker-Jarvis, J.; Janezic, M.D.; Riddle, B.F.; Johnk, R.T.; Kabos, P.; Holloway, C.L.; Geyer, R.G.; Grosvenor, C.A. Measuring the Permittivity and Permeability of Lossy Materials: Solids, Liquids, Metals, Building Materials, and Negative-Index Materials; NIST Tech. Note; NIST: Gaithersburg, MD, USA, 2005; p. 1536. [Google Scholar]
- Xu, J.; Ma, X.; Logsdon, S.; Horton, R. Short, Multineedle Frequency Domain Reflectometry Sensor Suitable for Measuring Soil Water Content. Soil Sci. Soc. Am. J. 2011, 76, 1929–1937. [Google Scholar] [CrossRef]
- Skierucha, W.; Wilczek, A. A FDR Sensor for Measuring Complex Soil Dielectric Permittivity in the 10–500 MHz Frequency Range. Sensors 2010, 10, 3314–3329. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wilczek, A.; Szyplowska, A.; Skierucha, W.; Cieśla, J.; Pichler, V.; Janik, G. Determination of soil pore water salinity using an FDR sensor working at various frequencies up to 500 MHz. Sensors 2012, 12, 10890–10905. [Google Scholar] [CrossRef]
- Pelletier, M.G.; Karthikeyan, S.; Green, T.R.; Schwartz, R.C.; Wanjura, J.D.; Holt, G.A. Soil Moisture Sensing via Swept Frequency Based Microwave Sensors. Sensors 2012, 12, 753–767. [Google Scholar] [CrossRef] [Green Version]
- Vázquez de León, A.; Oates, M.J.; Molina Martínez, J.M.; Ruiz Canales, A. Compromiso entre coste y frecuencia de trabajo en sensores FDR de bajo coste para la gestión del riego. In Proceedings of the VIII Congreso Ibérico de Agroingeniería: “Retos de la nueva agricultura mediterránea”, Orihuela-Algorfa, Spain, 1–3 June 2015; pp. 833–844. [Google Scholar]
- Segundo, A.; Martins, J.; Monteiro, P.; de Oliveira, R.; Freitas, G. A Novel Low-Cost Instrumentation System for Measuring the Water Content and Apparent Electrical Conductivity of Soils. Sensors 2015, 15, 25546–25563. [Google Scholar] [CrossRef] [Green Version]
- Kojima, Y.; Shigeta, R.; Miyamoto, N.; Shirahama, Y.; Nishioka, K.; Mizoguchi, M.; Kawahara, Y. Low-Cost Soil Moisture Profile Probe Using Thin-Film Capacitors and a Capacitive Touch Sensor. Sensors 2016, 16, 1292. [Google Scholar] [CrossRef]
- Magán, H.; Vidal, S.; Barriga, A.; Ceballos-Cáceres, J.; Linares-Barranco, B.; Mora-Gutiérrez, J.M.; Ramos-Martos, J. Sensor de humedad del suelo de bajo coste para control de regadíos. In Proceedings of the VII Workshop IBERCHIP (2001), Montevideo, Uruguay, 21–23 March 2001. [Google Scholar]
- Mander, G.; Arora, M. Design of capacitive sensor for monitoring moisture content of soil and analysis of analog voltage with variability in moisture. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chadigarh, India, 6–8 March 2014; IEEE: Chandigarh, India, 2014; pp. 1–5. [Google Scholar]
- SDI-12 Support Group Inc. SDI-12 Support Group. Available online: http://www.sdi-12.org/ (accessed on 9 November 2018).
- Jiang, M.; Lv, M.; Deng, Z.; Zhai, G. A wireless soil moisture sensor powered by solar energy. PLoS ONE 2017, 12, e0184125. [Google Scholar] [CrossRef]
- Schugurensky, C.; Capraro, F. Control automático de riego agrícola con sensores capacitivos de humedad de suelo. Aplicaciones en vid y olivo. In Proceedings of the Actas de XVIII Congreso de la Asociación Chilena de Control Automático (ACCA), Santiago, Chile, 10–12 December 2008. [Google Scholar]
- 10HS | Large Volume Soil Moisture Sensor | METER Environment. Available online: https://www.metergroup.com/environment/products/ech20-10hs-soil-moisture-sensor/ (accessed on 9 November 2018).
- EC-5 | Soil Moisture Sensor | METER Environment. Available online: https://www.metergroup.com/environment/products/ec-5-soil-moisture-sensor/ (accessed on 9 November 2018).
- ECH2O 5TM | Soil Moisture and Temperature Sensor | METER Environment. Available online: https://www.metergroup.com/environment/products/ech2o-5tm-soil-moisture/ (accessed on 9 November 2018).
- González-Teruel, J.D. Análisis y Modelado de Sensores de Reflectometría en Frecuencia para Medida de Agua en el Suelo. Master’s Thesis, Universidad Politécnica de Cartagena, Cartagena, Spain, 2017. [Google Scholar]
- Aliau Bonet, C.; Pallàs Areny, R. Efecto de las capacidades parásitas a tierra en las medidas de impedancia eléctrica con dos terminales. In Proceedings of the Seminario Anual de Automática, Electrónica Industrial e Instrumentación-SAAEI 2011, Badajoz, Spain, 6–8 July 2011; pp. 373–378. [Google Scholar]
- Arduino official website. Available online: https://www.arduino.cc/ (accessed on 9 November 2018).
- Smith, K.M. Arduino Library for SDI-12 Communications to a Wide Variety of Environmental Sensors. Available online: https://github.com/EnviroDIY/Arduino-SDI-12 (accessed on 16 October 2018).
- Nawrath, M. Arduino Frequency Counter Library. Available online: http://interface.khm.de/index.php/lab/interfaces-advanced/arduino-frequency-counter-library/ (accessed on 16 October 2018).
- 10 HS Soil Moisture Sensor Manual; Decagon Devices, Inc.: Pullman, WA, USA, 2016.
- 5TE Water Content, EC and Temperature Sensor Manual; Decagon Devices, Inc.: Pullman, WA, USA, 2016.
- Starr, J.L.; Paltineanu, I.C. Methods for Measurement of Soil Water Content: Capacitance Devices. In Methods of Soil Analysis. Part 4 Physical Methods. SSSA Book Ser. 5.4; Soil Science Society of America: Madison, WI, USA, 2002; pp. 463–474. [Google Scholar]
- Llamosa, L.E.; Meza, L.G.; Botero, M. Estudio de repetibilidad y reproducibilidad utilizando el método de promedios y rangos para el aseguramiento de la calidad de los resultados de calibración de acuerdo con la norma técnica NTC- ISO/IEC 17025. Sci. Tech. 2007, 35, 455–460. [Google Scholar]
- Tsai, P. Variable Gauge Repeatability and Reproducibility Study Using the Analysis of Variance Method. Qual. Eng. 1988, 1, 107–115. [Google Scholar] [CrossRef]
- Rosenbaum, U.; Huisman, J.A.; Weuthen, A.; Vereecken, H.; Bogena, H.R. Sensor-to-Sensor Variability of the ECH2O EC-5, TE, and 5TE Sensors in Dielectric Liquids. Vadose Zone J. 2010, 9, 181–186. [Google Scholar] [CrossRef]
- Quaglino, M.; Pagura, J.; Dianda, D.; Lupachini, E. Estudio de sistemas de medida con ensayos destructivos. Una aplicación sobre tiempos de producción. SaberEs 2010, 2, 59–72. [Google Scholar]
- SIAM—Sistema de Información Agraria de Murcia. Available online: http://siam.imida.es/apex/f?p=101:1:3490109975559928 (accessed on 7 December 2018).
- Baumhardt, R.L.; Lascano, R.J.; Evett, S.R. Soil Material, Temperature, and Salinity Effects on Calibration of Multisensor Capacitance Probes. Soil Sci. Soc. Am. J. 2000, 64, 1940–1946. [Google Scholar] [CrossRef]
- Gutiérrez Gnecchi, J.A.; Campos Tirado, L.F.; Ramírez Chávez, G.M.; Gordillo Doñan, R.; Esquivel, C.F. Design of a Soil Moisture Sensor with Temperature Compensation Using a Backpropagation Neural Network. In Proceedings of the 2008 Electronics, Robotics and Automotive Mechanics Conference (CERMA ’08), Cuernavaca, Mexico, 30 September–3 October 2008; IEEE: Morelos, Mexico, 2008; pp. 553–558. [Google Scholar]
- Oates, M.; Fernández-López, A.; Ferrández-Villena, M.; Ruiz-Canales, A. Temperature compensation in a low cost frequency domain (capacitance based) soil moisture sensor. Agric. Water Manag. 2016. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil | VWC Level | p-Value | σsensor (kHz) | %Repeatability | %Reproducibility |
|---|---|---|---|---|---|
| i | 1 | 0.39236 | 2.65818 | 97.33 | 2.67 |
| 2 | 0.22629 | 3.95258 | 74.24 | 5.76 | |
| 3 | 0.95760 | 1.39010 | 75.06 | 24.94 | |
| 4 | 0.14010 | 1.78168 | 79.28 | 20.72 | |
| 5 | 0.83585 | 0.20544 | 80.76 | 19.24 | |
| ii | 1 | 0.85086 | 2.36019 | 75.76 | 24.24 |
| 2 | 0.21983 | 0.89163 | 72.96 | 27.04 | |
| 3 | 0.60834 | 3.62905 | 81.26 | 18.74 | |
| 4 | 0.69355 | 3.30620 | 82.83 | 17.17 | |
| 5 | 0.73319 | 6.76834 | 77.59 | 22.41 | |
| 6 | 0.39447 | 1.38040 | 97.04 | 2.96 | |
| 7 | 0.12632 | 2.84352 | 52.53 | 47.47 | |
| 8 | 0.65849 | 1.33800 | 79.52 | 20.48 | |
| 9 | 0.63688 | 1.81779 | 80.22 | 19.78 | |
| 10 | 0.33364 | 0.76075 | 93.55 | 6.45 | |
| 11 | 0.81634 | 0.45644 | 76.17 | 23.83 | |
| iii | 1 | 0.24829 | 2.40258 | 78.47 | 21.53 |
| 2 | 0.77282 | 3.70001 | 76.83 | 23.17 | |
| 3 | 0.96216 | 4.08861 | 75.05 | 24.95 | |
| 4 | 0.99348 | 2.16998 | 75.00 | 25.00 | |
| 5 | 0.14704 | 2.97047 | 57.44 | 42.56 | |
| 6 | 0.24207 | 4.23144 | 77.29 | 22.71 |
| Soil | Function | a | b | c | R2 | RMSE |
|---|---|---|---|---|---|---|
| i | ) | 368.9 | −0.03958 | - | 0.9653 | 2.9903 |
| ) | −15.26 | 2149 | −23.52 | 0.9618 | 3.1843 | |
| ) | 1.746E6 | −2.657 | - | 0.9614 | 3.1545 | |
| ii | Exponential | 236.5 | −0.0322 | - | 0.9593 | 2.5034 |
| Rational | −15.42 | 2391 | −16.71 | 0.9516 | 2.7509 | |
| Potential | 3.077E5 | −2.227 | - | 0.9460 | 2.8838 | |
| iii | Exponential | 215.6 | −0.04287 | - | 0.9237 | 2.6317 |
| Rational | −5.957 | 941.7 | −23.52 | 0.8831 | 3.3075 | |
| Potential | 4.567E5 | −2.509 | - | 0.8959 | 3.0749 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Teruel, J.D.; Torres-Sánchez, R.; Blaya-Ros, P.J.; Toledo-Moreo, A.B.; Jiménez-Buendía, M.; Soto-Valles, F. Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor. Sensors 2019, 19, 491. https://0-doi-org.brum.beds.ac.uk/10.3390/s19030491
González-Teruel JD, Torres-Sánchez R, Blaya-Ros PJ, Toledo-Moreo AB, Jiménez-Buendía M, Soto-Valles F. Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor. Sensors. 2019; 19(3):491. https://0-doi-org.brum.beds.ac.uk/10.3390/s19030491
Chicago/Turabian StyleGonzález-Teruel, Juan D., Roque Torres-Sánchez, Pedro J. Blaya-Ros, Ana B. Toledo-Moreo, Manuel Jiménez-Buendía, and Fulgencio Soto-Valles. 2019. "Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor" Sensors 19, no. 3: 491. https://0-doi-org.brum.beds.ac.uk/10.3390/s19030491