
Reflectance Estimation from Multispectral Linescan Acquisitions under Varying Illumination—Application to Outdoor Weed Identification †


Abstract
:1. Introduction
2. Multispectral Radiance Image Acquisition by Snapscan Camera
2.1. Radiance Measurement
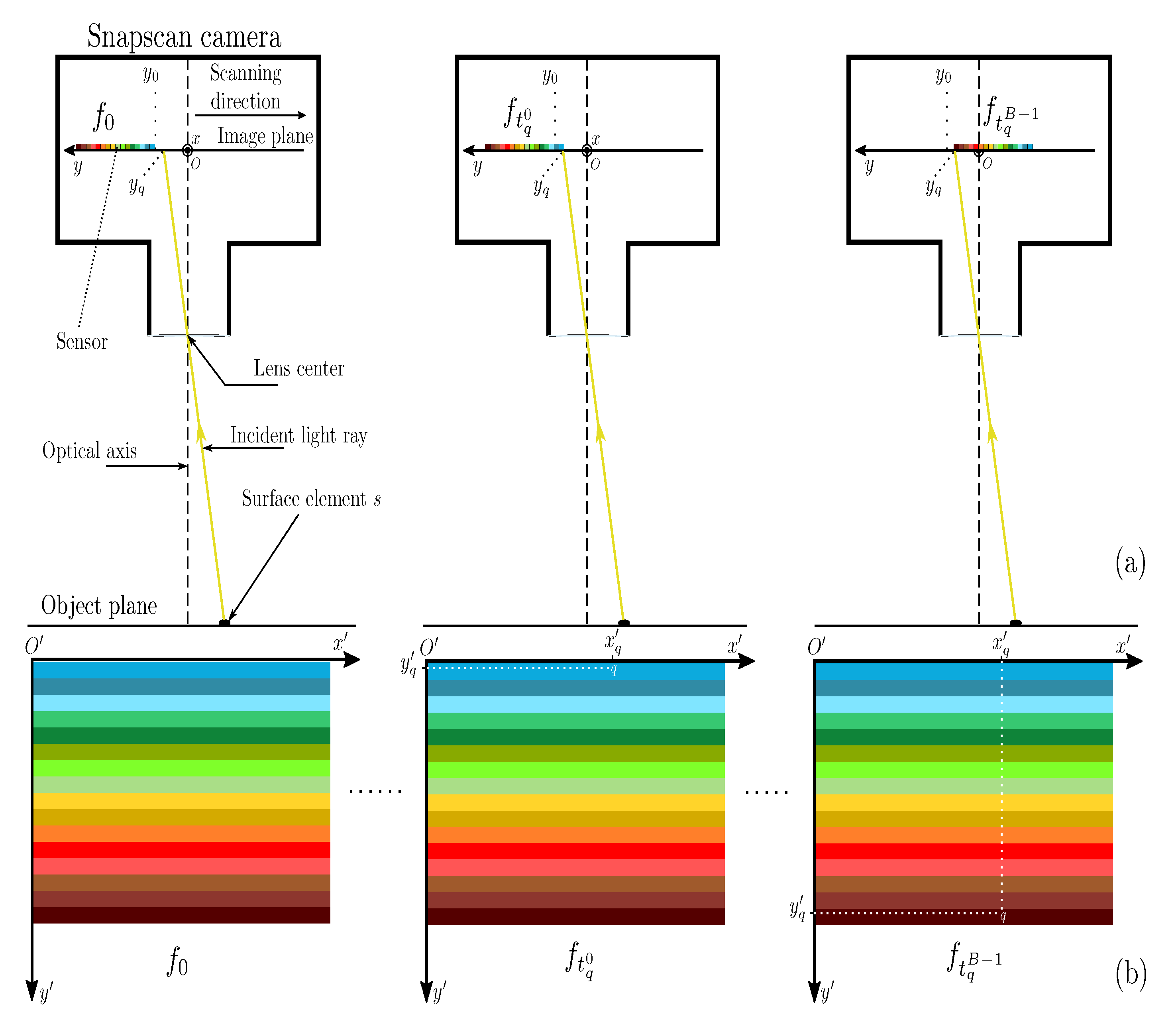
2.2. Frame Acquisition
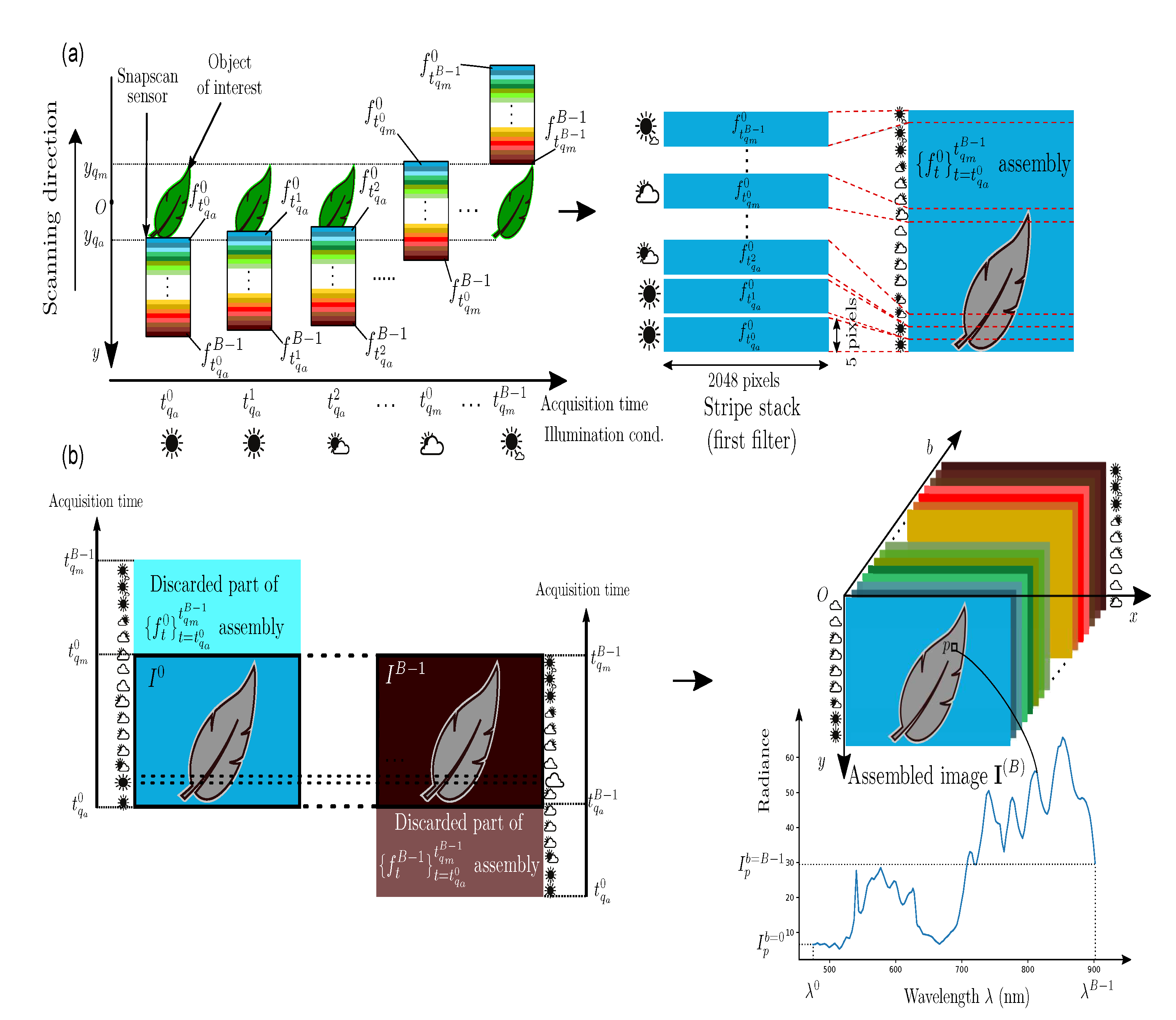
2.3. Stripe Assembly
2.4. Formation Model of a Multispectral Image Acquired by Snapscan Camera
3. Reflectance Estimation with a White Diffuser under Constant Illumination
3.1. Reflectance Estimation
- (i)
- The illumination is spatially uniform and it does not vary during the frame acquisitions, thus for all and , and Equation (9) becomes:Note that the quantization function Q is omitted here, since the different terms are considered as being already quantized.
- (ii)
- Each of the Fabry-Perot filters has an ideal SSF such that Equation (10) becomes:
3.2. Spectral Correction
3.3. Negative Value Removal
4. Outdoor Reflectance Estimation with Reference Devices in the Scene
4.1. Vignetting Correction
4.2. Reflectance Estimation with One Reference Device under Constant Illumination
4.3. Reflectance Estimation with One Reference Device under Varying Illumination
5. Experiments about Outdoor Reflectance Estimation
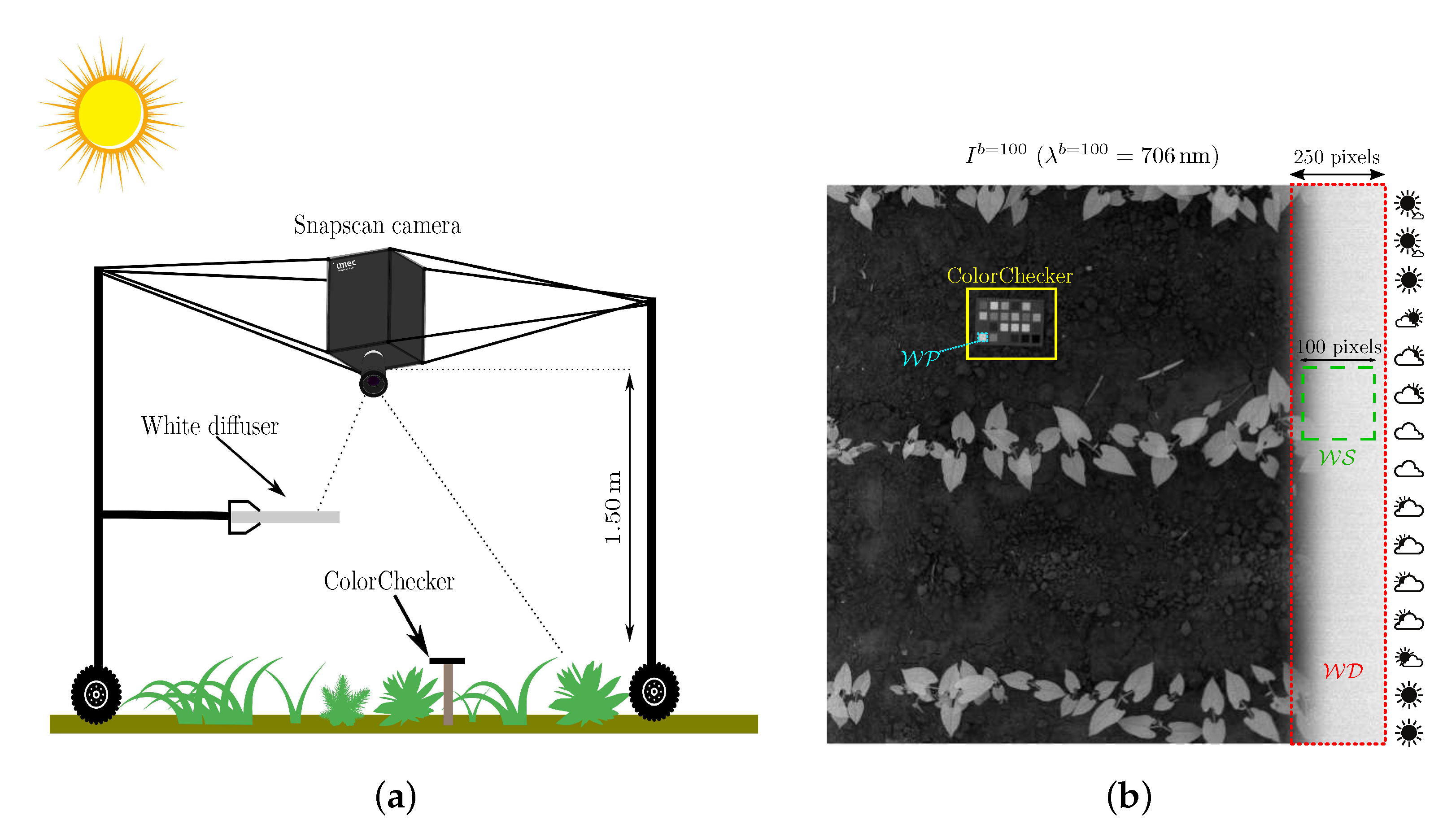
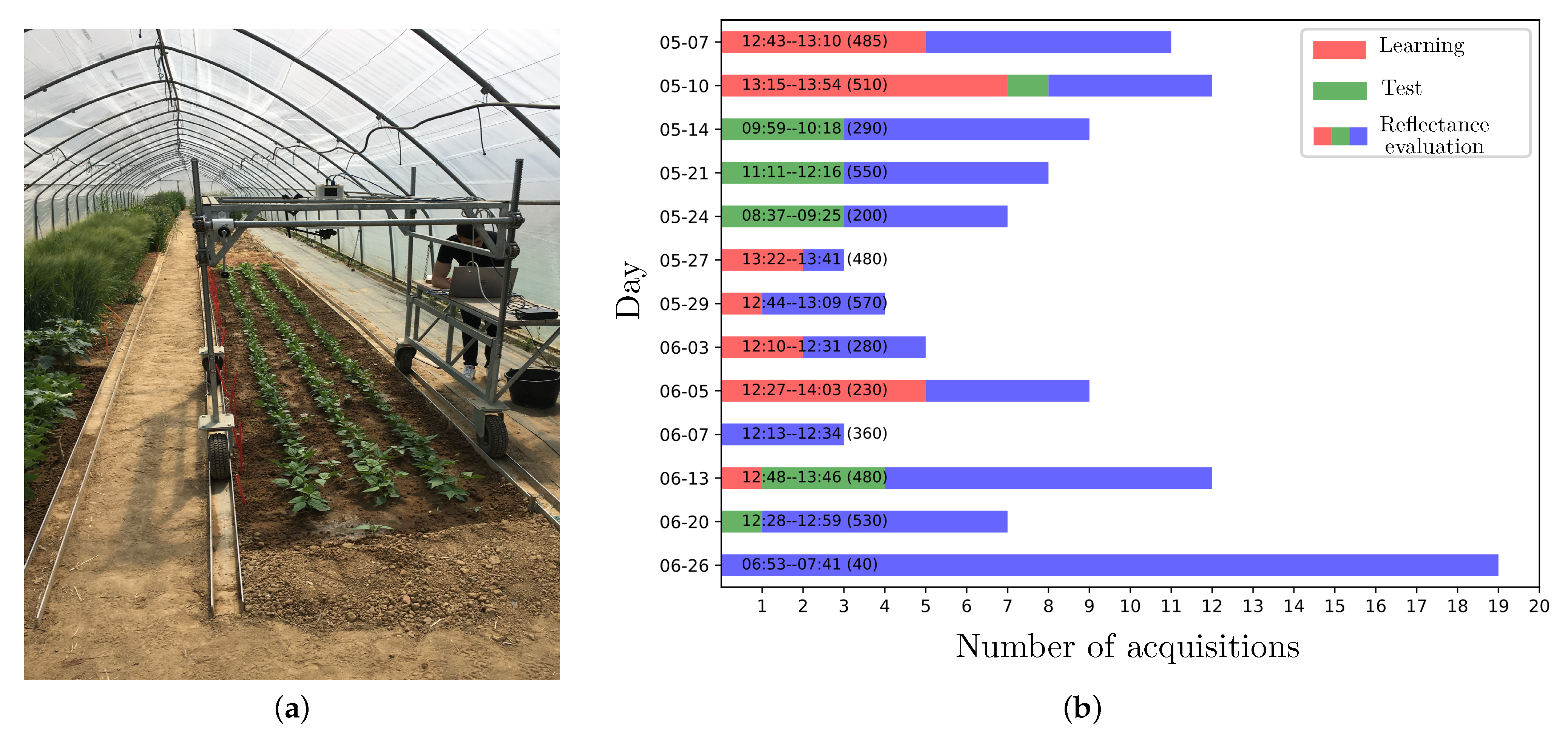
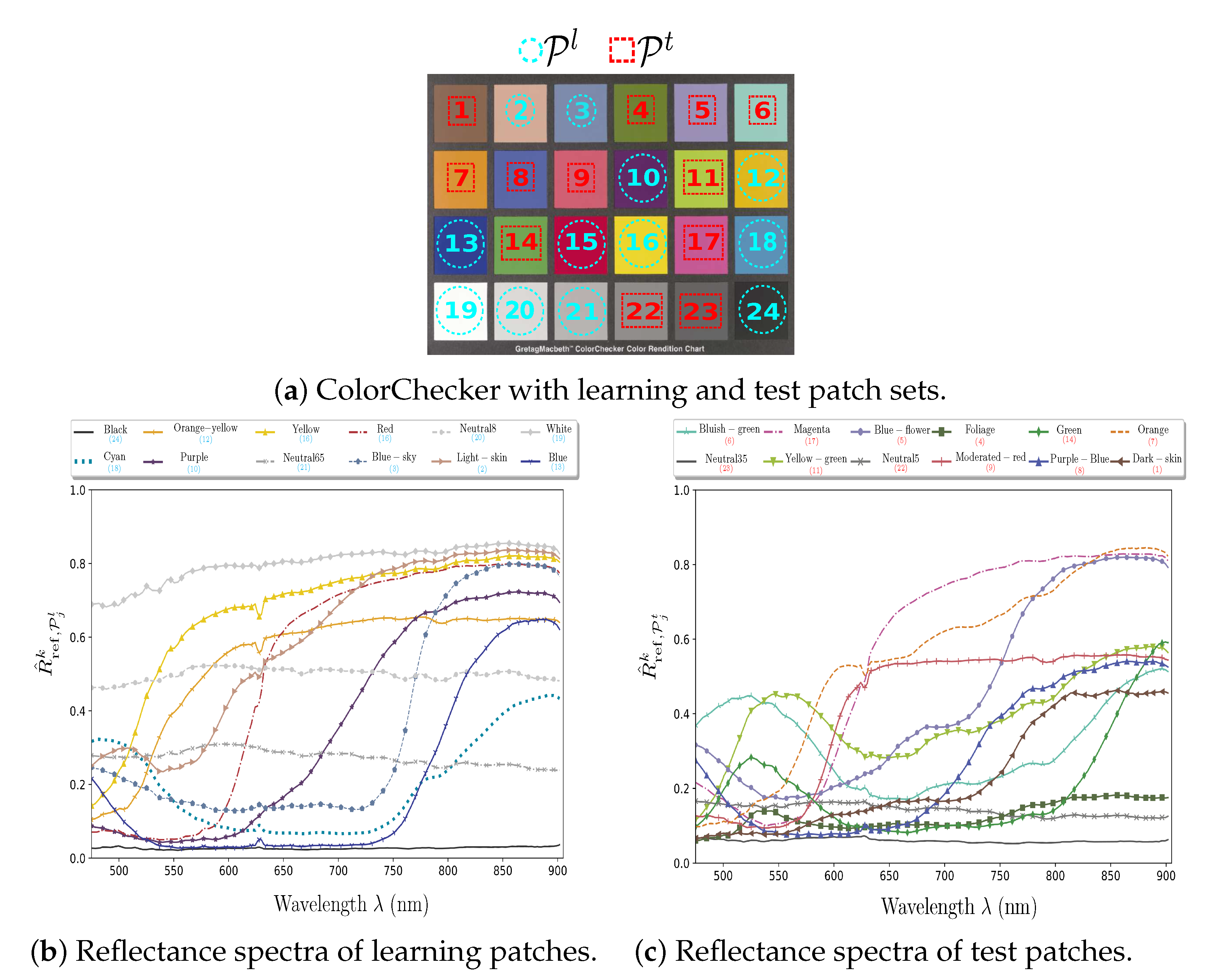
5.1. Experimental Setup
5.2. Training-Based Reflectance Estimation
5.3. Evaluation Metrics
5.4. Results
6. Multispectral Image Segmentation
6.1. Vegetation Pixel Extraction and Labelling
6.2. Learning and Test Vegetation Pixels
6.3. Evaluation Metrics
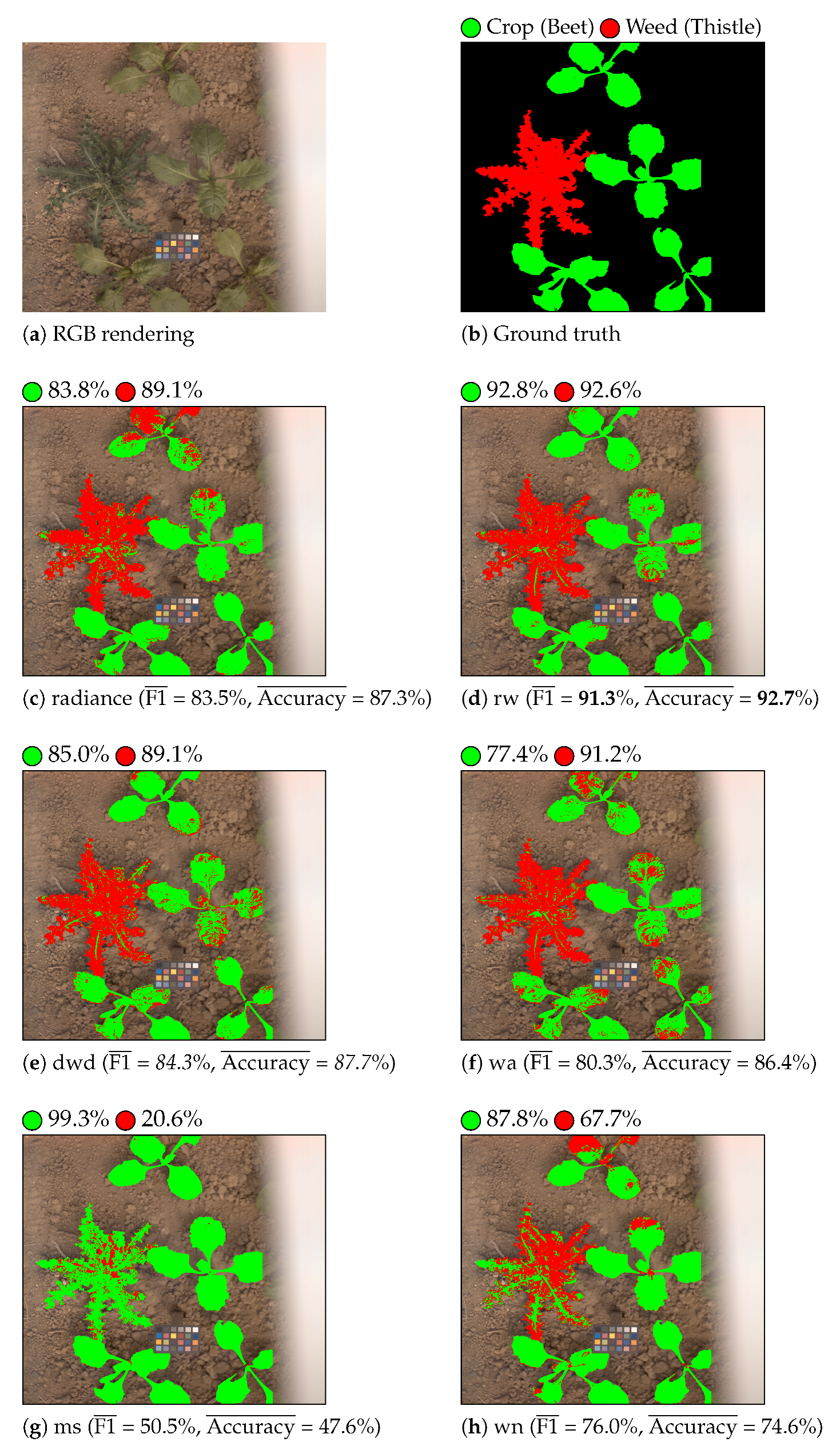
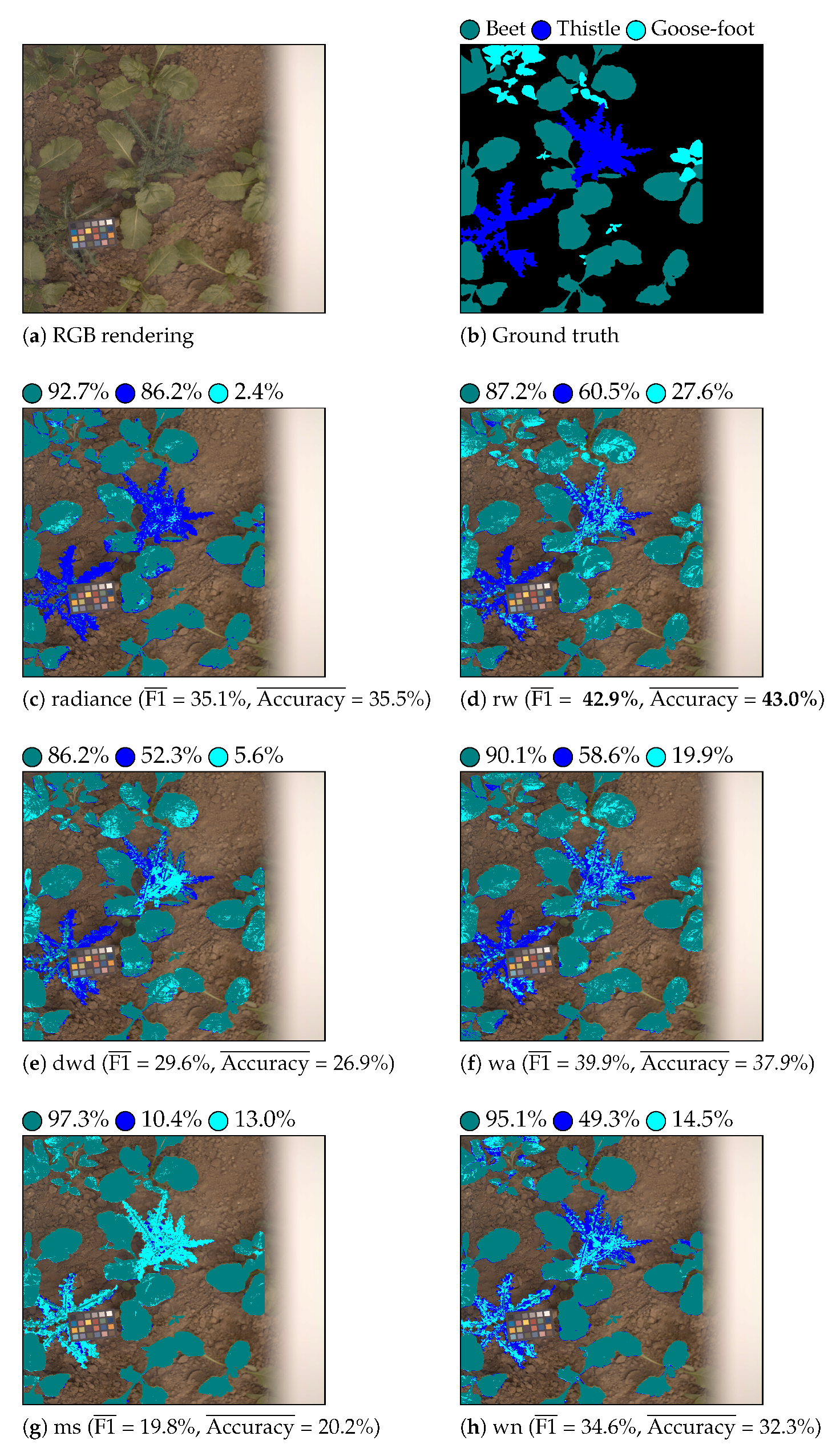
6.4. Classification Results
6.5. Experimental Conclusions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Implementation of the Double White-Diffuser Method (dwd)
- Following Equation (14) but neglecting integration times and diffuse reflection factor, a coarse reflectance estimation is first computed as:Like in Section 3.1, this step aims to compensate the vignetting effect by a pixel-wise division of values associated to the full-field white diffuser and associated to the scene. Note that a full-field white diffuser image is acquired before each image acquisition.
- Because the illumination associated to is different from that of the scene image , is rescaled row-wise at each pixel p as:where the illumination scaling factor is computed at the row of p as:Each term in this equation is the average value over the row of p within the white diffuser subset in channel of either the full-field white diffuser image or the scene image.
- Finally, the values of are normalized channel-wise to provide the reflectance estimation as:where is the average value over the white patch subset in channel , and is the diffuse reflection factor of the white patch for the spectral band centered at measured by a spectroradiometer in laboratory.
References
- Wendel, A.; Underwood, J. Self-supervised weed detection in vegetable crops using ground based hyperspectral imaging. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 12–16 May 2016; pp. 5128–5135. [Google Scholar] [CrossRef]
- Feyaerts, F.; van Gool, L. Multi-spectral vision system for weed detection. Pattern Recognit. Lett. 2001, 22, 667–674. [Google Scholar] [CrossRef]
- Lin, F.; Zhang, D.; Huang, Y.; Wang, X.; Chen, X. Detection of Corn and Weed Species by the Combination of Spectral, Shape and Textural Features. Sustainability 2017, 9, 1335. [Google Scholar] [CrossRef] [Green Version]
- Hagen, N.; Kudenov, M.W. Review of snapshot spectral imaging technologies. Opt. Eng. 2013, 52, 090901. [Google Scholar] [CrossRef] [Green Version]
- Gat, N. Imaging spectroscopy using tunable filters: A review. In Proceedings of the SPIE: Wavelet Applications VII, Orlando, FL, USA, 5 April 2000; Volume 4056, pp. 50–64. [Google Scholar] [CrossRef] [Green Version]
- Bianco, G.; Bruno, F.; Muzzupappa, M. Multispectral data cube acquisition of aligned images for document analysis by means of a filter-wheel camera provided with focus control. J. Cult. Herit. 2013, 14, 190–200. [Google Scholar] [CrossRef]
- Yoon, S.C.; Park, B.; Lawrence, K.C.; Windham, W.R.; Heitschmidt, G.W. Line-scan hyperspectral imaging system for real-time inspection of poultry carcasses with fecal material and ingesta. Comput. Electron. Agric. 2011, 79, 159–168. [Google Scholar] [CrossRef]
- Pichette, J.; Charle, W.; Lambrechts, A. Fast and compact internal scanning CMOS-based hyperspectral camera: The Snapscan. In Proceedings of the SPIE: Photonic Instrumentation Engineering IV, San Francisco, CA, USA, 31 January–2 February 2017; Volume 10110, pp. 1–10. [Google Scholar] [CrossRef]
- Shen, H.L.; Cai, P.Q.; Shao, S.J.; Xin, J.H. Reflectance reconstruction for multispectral imaging by adaptive Wiener estimation. Opt. Express 2007, 15, 15545–15554. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, H.A.; Thomas, J.B.; Hardeberg, J.Y.; Laligant, O. Multispectral camera as spatio-spectrophotometer under uncontrolled illumination. Opt. Express 2019, 27, 1051–1070. [Google Scholar] [CrossRef] [PubMed]
- Heikkinen, V.; Lenz, R.; Jetsu, T.; Parkkinen, J.; Hauta-Kasari, M.; Jääskeläinen, T. Evaluation and unification of some methods for estimating reflectance spectra from RGB images. J. Opt. Soc. Am. 2008, 25, 2444–2458. [Google Scholar] [CrossRef] [PubMed]
- Bourgeon, M.A.; Paoli, J.N.; Jones, G.; Villette, S.; Gée, C. Field radiometric calibration of a multispectral on-the-go sensor dedicated to the characterization of vineyard foliage. Comput. Electron. Agric. 2016, 123, 184–194. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious Radiometric Calibration of Multispectral Camera on Board Unmanned Aerial System. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef] [Green Version]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y. Characterization of Rice Paddies by a UAV-Mounted Miniature Hyperspectral Sensor System. IEEE J-STARS 2013, 6, 851–860. [Google Scholar] [CrossRef]
- Khan, H.A.; Thomas, J.B.; Hardeberg, J.Y.; Laligant, O. Illuminant estimation in multispectral imaging. J. Opt. Soc. Am. 2017, 34, 1085–1098. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eckhard, J.; Eckhard, T.; Valero, E.M.; Nieves, J.L.; Contreras, E.G. Outdoor scene reflectance measurements using a Bragg-grating-based hyperspectral image. Appl. Opt. 2015, 54, D15–D24. [Google Scholar] [CrossRef] [Green Version]
- Zeng, C.; King, D.J.; Richardson, M.; Shan, B. Fusion of Multispectral Imagery and Spectrometer Data in UAV Remote Sensing. Remote Sens. 2017, 9, 696. [Google Scholar] [CrossRef] [Green Version]
- Goossens, T.; Geelen, B.; Pichette, J.; Lambrechts, A.; Van Hoof, C. Finite aperture correction for spectral cameras with integrated thin film Fabry-Perot filters. Appl. Opt. 2018, 57, 7539–7549. [Google Scholar] [CrossRef]
- Yu, W. Practical anti-vignetting methods for digital cameras. IEEE Trans. Consum. Electron. 2004, 50, 975–983. [Google Scholar] [CrossRef]
- Khan, H.A.; Mihoubi, S.; Mathon, B.; Thomas, J.B.; Hardeberg, J.Y. HyTexiLa: High Resolution Visible and Near Infrared Hyperspectral Texture Images. Sensors 2018, 18, 2045. [Google Scholar] [CrossRef] [Green Version]
- Amziane, A.; Losson, O.; Mathon, B.; Dumenil, A.; Macaire, L. Frame-based reflectance estimation from multispectral images for weed identification in varying illumination conditions. In Proceedings of the 2020 Tenth International Conference on Image Processing Theory, Tools and Applications (IPTA), Paris, France, 9–12 November 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Global Solar Irradiance in France. Available online: https://www.data.gouv.fr/fr/datasets/rayonnement-solaire-global-et-vitesse-du-vent-a-100-metres-tri-horaires-regionaux-depuis-janvier-2016/ (accessed on 4 May 2021).
- Stigell, P.; Miyata, K.; Hauta-Kasari, M. Wiener estimation method in estimating of spectral reflectance from RGB images. Pattern Recognit. Image Anal. 2007, 17, 233–242. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Smith, R.B.; De Pauw, E. Evaluation of Narrowband and Broadband Vegetation Indices for Determining Optimal Hyperspectral Wavebands for Agricultural Crop Characterization. Photogramm. Eng. Remote Sens. 2002, 68, 607–621. [Google Scholar]
- He, H.; Ma, Y. Imbalanced Learning: Foundations, Algorithms, and Applications, 1st ed.; Wiley-IEEE Press: Piscataway, NJ, USA, 2013. [Google Scholar]
- HySpex VNIR-1800. Available online: https://www.hyspex.com/hyspex-products/hyspex-classic/hyspex-vnir-1800/ (accessed on 16 February 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Illumination-Based | Training-Based | |||
|---|---|---|---|---|---|
| (%) | 4.315 | 5.883 | 14.670 | 3.236 | 3.628 |
| (rad) | 0.046 | 0.046 | 0.309 | 0.063 | 0.063 |
| (23 Images) | (14 Images) | ||||||
|---|---|---|---|---|---|---|---|
| Class | #Occurrences | # Learning Pixels per Occurrence | #Occurrences | #Test Pixels per Class | |||
| Crop | Beet | 17 | 12 | 5,714,326 | |||
| Weed | Thistle Goosefoot | 9 12 | 10 4 | 6,744,633 | 5,461,013 1,283,620 | ||
| Radiance | Reflectance Features | |||||||
|---|---|---|---|---|---|---|---|---|
| Classifier | Feature | Illumination-Based | Training-Based | |||||
| rw | ||||||||
| Crop/weed detection | (%) | QDA | 71.6 | 76.0 | 73.3 | 79.2 | 76.9 | 48.1 |
| LGBM | 77.0 | 86.1 | 84.7 | 81.8 | 83.4 | 71.0 | ||
| (%) | QDA | 67.9 | 76.0 | 73.0 | 77.8 | 76.5 | 48.0 | |
| LGBM | 76.2 | 85.4 | 84.4 | 81.6 | 83.1 | 71.3 | ||
| Beet/thistle/goosefoot identification | (%) | QDA | 34.4 | 45.1 | 41.8 | 26.0 | 37.3 | 47.8 |
| LGBM | 39.5 | 49.7 | 50.3 | 46.5 | 46.0 | 34.0 | ||
| (%) | QDA | 34.3 | 41.7 | 40.1 | 25.4 | 33.7 | 27.0 | |
| LGBM | 39.7 | 47.1 | 44.4 | 41.4 | 42.5 | 32.9 | ||
| Evaluation Criterion | Method | ||||||
|---|---|---|---|---|---|---|---|
| (%) | 3 | 4 | 5 | 1 | 2 | ||
| (rad) | 1 | 1 | 5 | 3 | 3 | ||
| Crop/weed detection | QDA | 3 | 4 | 1 | 2 | 5 | |
| LGBM | 1 | 2 | 4 | 3 | 5 | ||
| QDA | 3 | 4 | 1 | 2 | 5 | ||
| LGBM | 1 | 2 | 4 | 3 | 5 | ||
| 12 | 17 | 20 | 14 | 25 | |||
| Evaluation Criterion | Method | ||||||
|---|---|---|---|---|---|---|---|
| (%) | 3 | 4 | 5 | 1 | 2 | ||
| (rad) | 1 | 1 | 5 | 3 | 3 | ||
| Beet/thistle/goosefoot identification | QDA | 2 | 3 | 5 | 4 | 1 | |
| LGBM | 2 | 1 | 3 | 4 | 5 | ||
| QDA | 1 | 2 | 5 | 3 | 4 | ||
| LGBM | 1 | 2 | 4 | 3 | 5 | ||
| 10 | 13 | 27 | 18 | 20 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amziane, A.; Losson, O.; Mathon, B.; Dumenil, A.; Macaire, L. Reflectance Estimation from Multispectral Linescan Acquisitions under Varying Illumination—Application to Outdoor Weed Identification. Sensors 2021, 21, 3601. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113601
Amziane A, Losson O, Mathon B, Dumenil A, Macaire L. Reflectance Estimation from Multispectral Linescan Acquisitions under Varying Illumination—Application to Outdoor Weed Identification. Sensors. 2021; 21(11):3601. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113601
Chicago/Turabian StyleAmziane, Anis, Olivier Losson, Benjamin Mathon, Aurélien Dumenil, and Ludovic Macaire. 2021. "Reflectance Estimation from Multispectral Linescan Acquisitions under Varying Illumination—Application to Outdoor Weed Identification" Sensors 21, no. 11: 3601. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113601