
Using Smart Virtual-Sensor Nodes to Improve the Robustness of Indoor Localization Systems


Abstract
:1. Introduction
- using of machine learning and neural networks to implement virtual sensors to replace temporarily unavailable physical sensors nodes in order to maintain the operation of indoor localization systems;
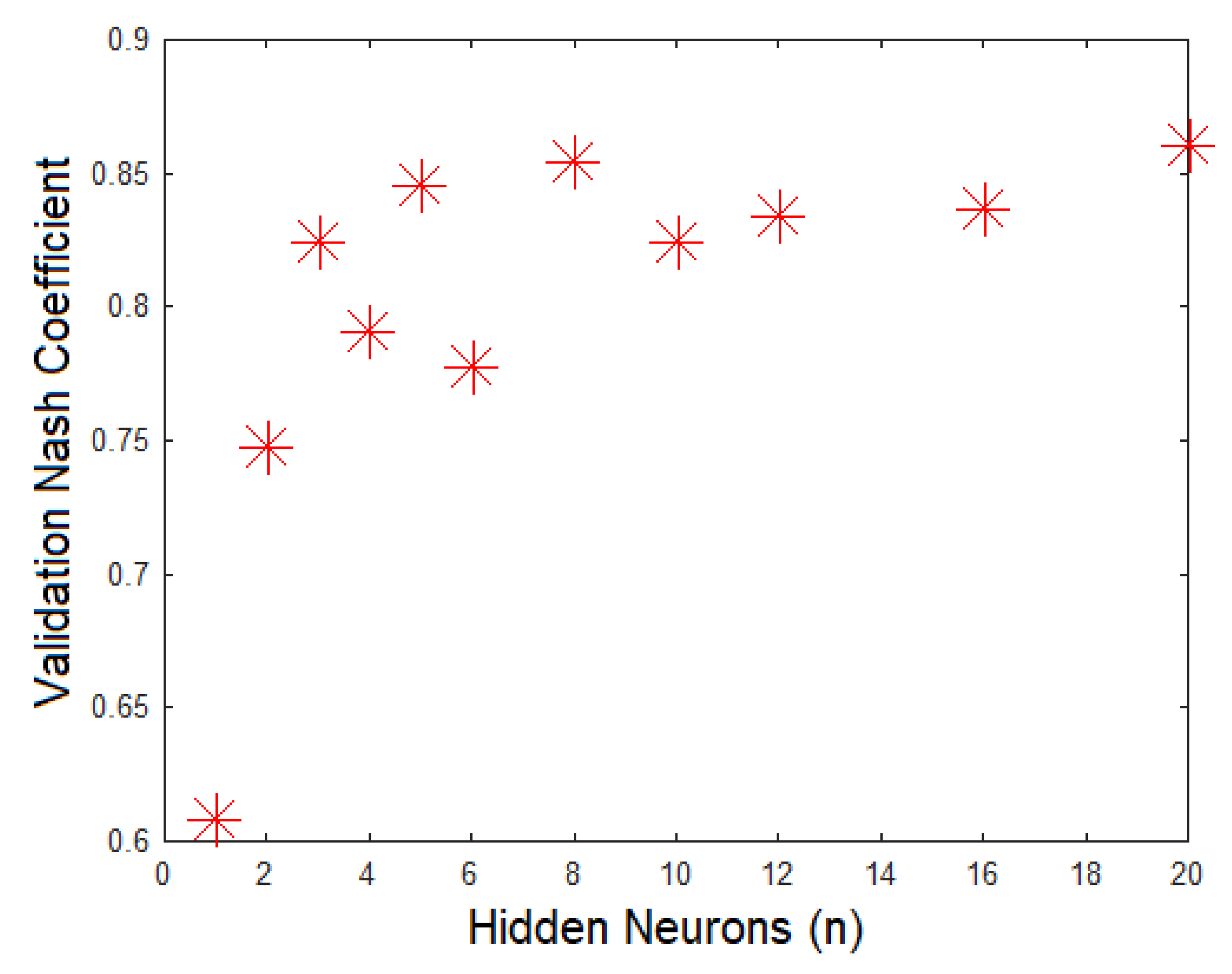
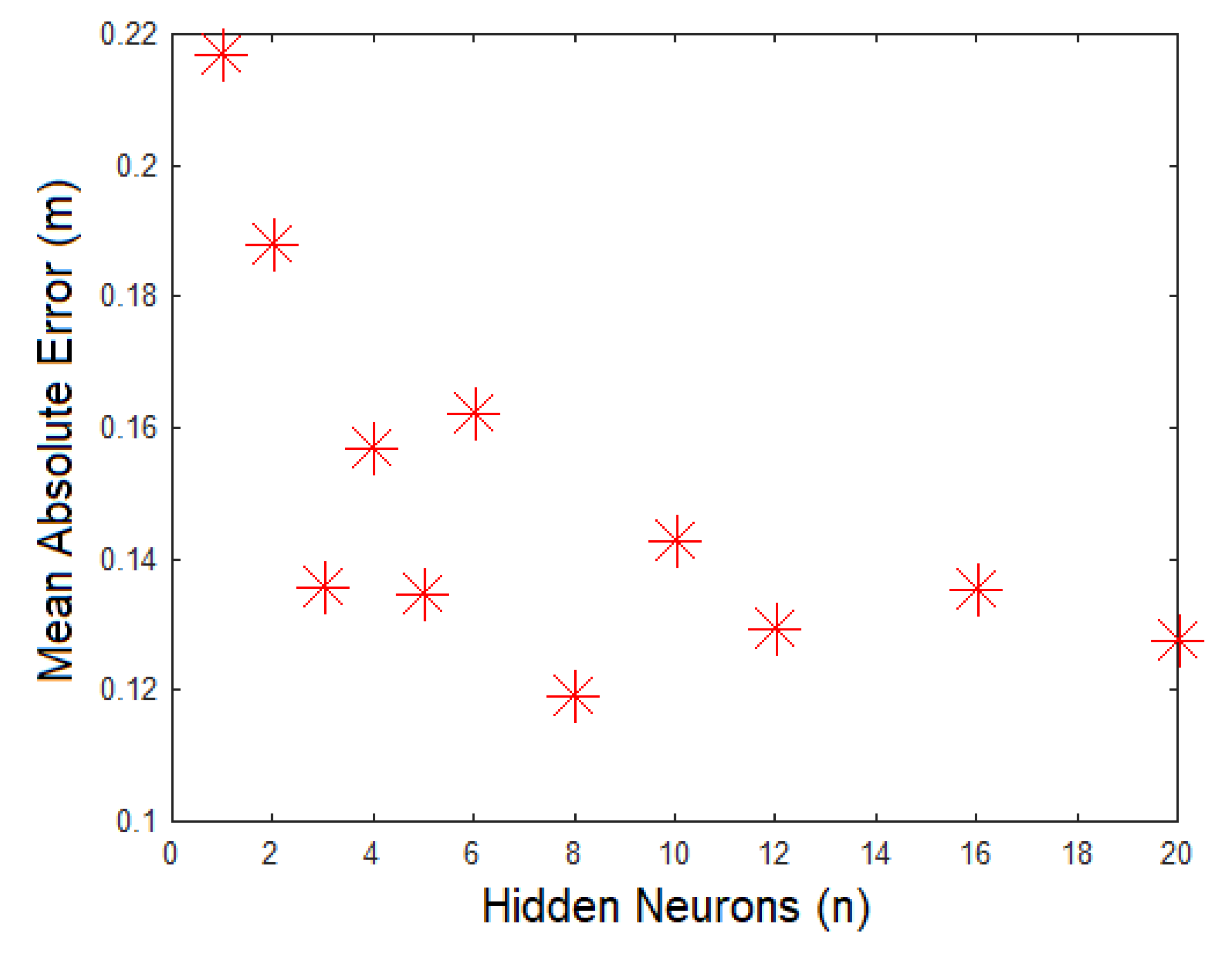
- assessing of the number of neurons in the ANN that are sufficient to provide satisfactory results in keeping the network computing the target’s position.
2. Related Works
3. Problem Statement and Proposed Solution Overview
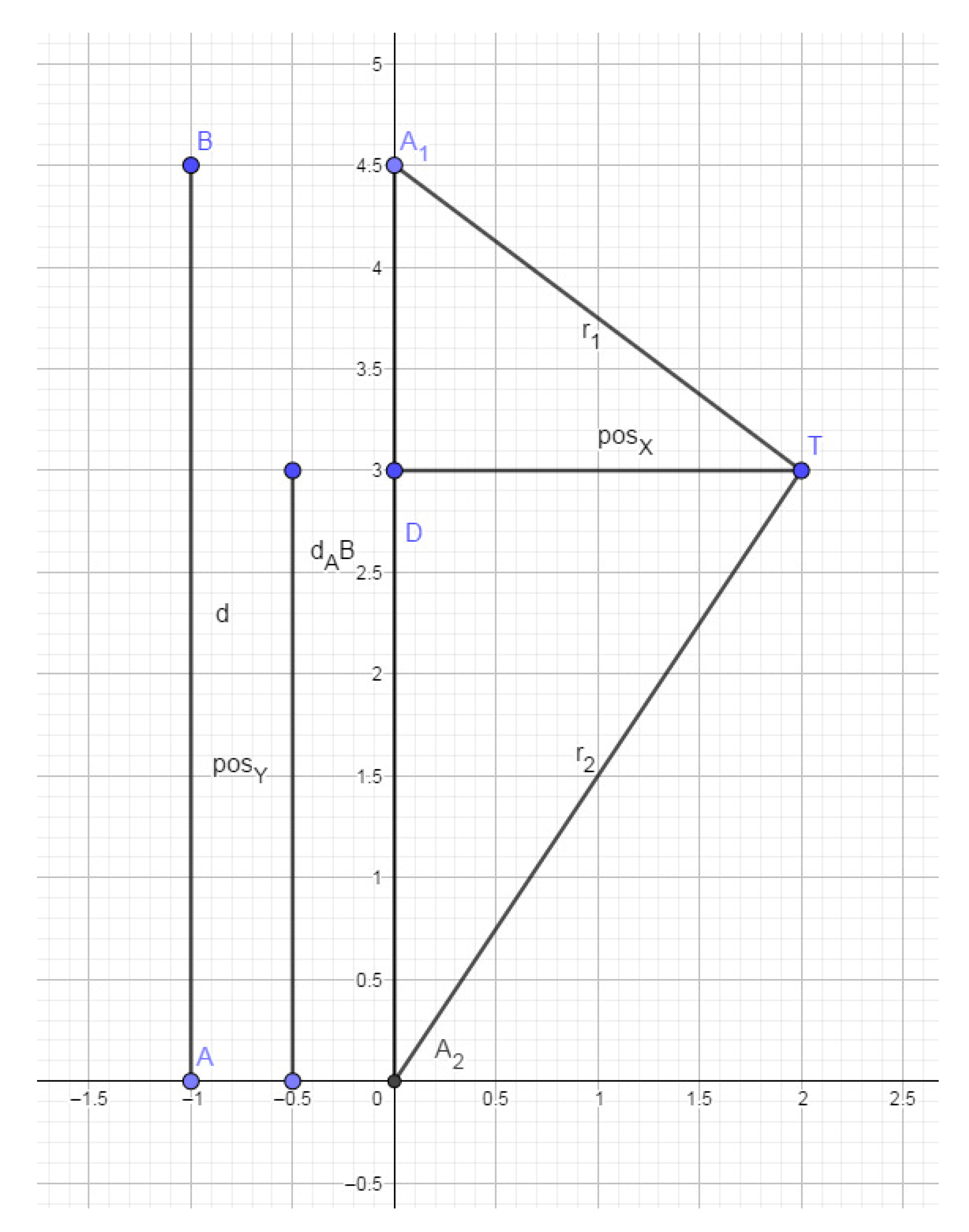
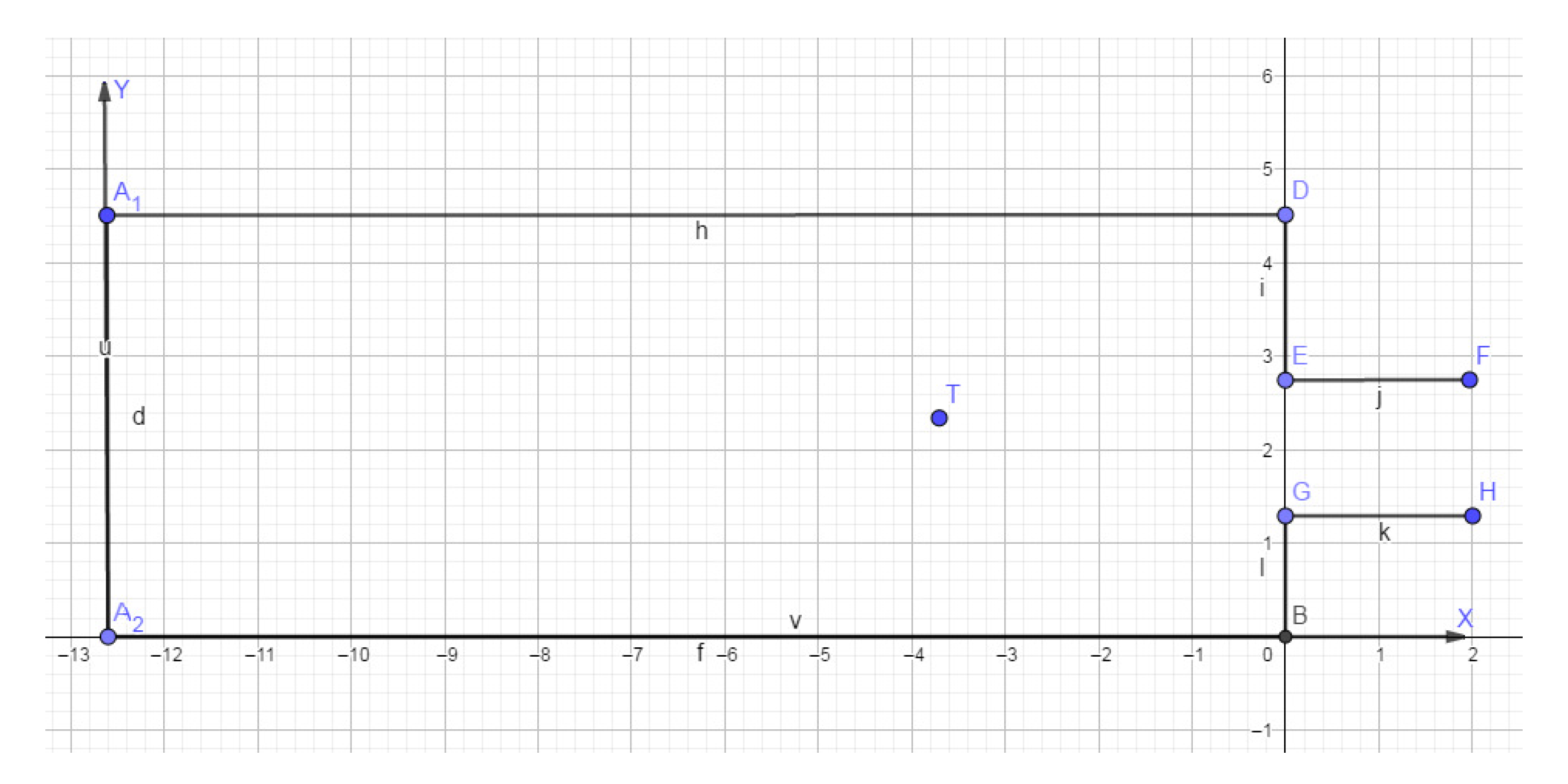
4. Fingerprint Calculation
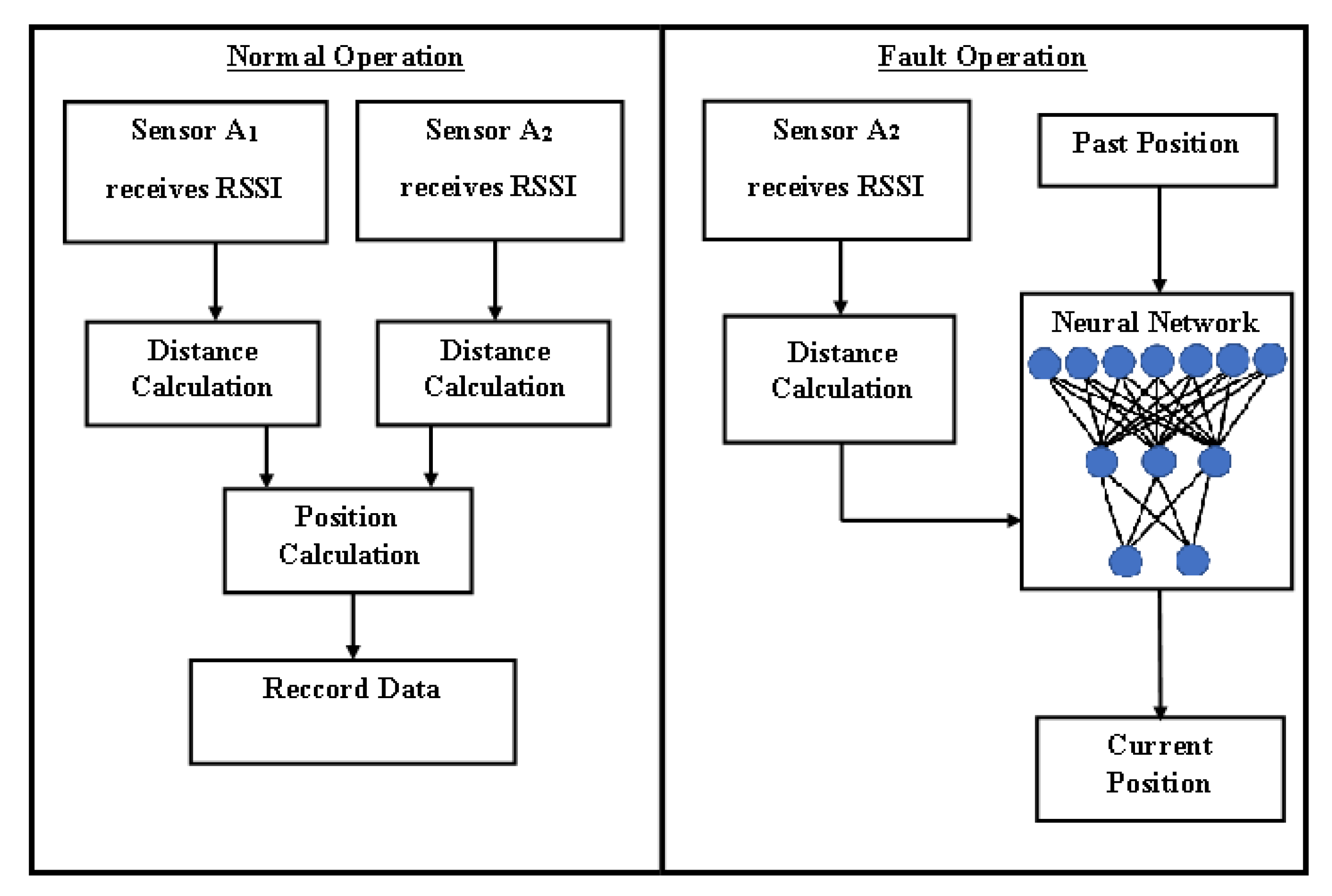
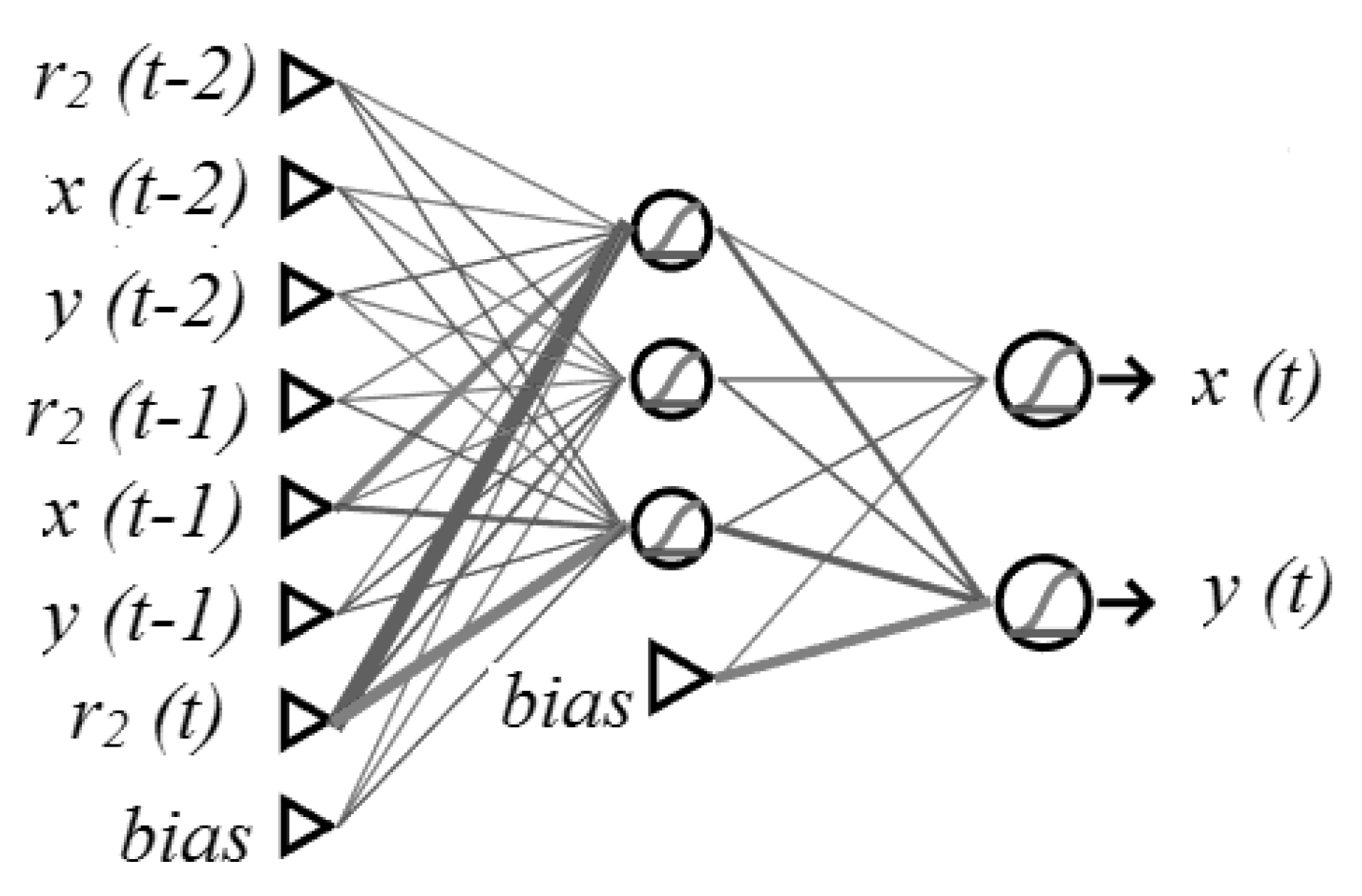
5. System Architecture
6. Experiments and Results
6.1. Experimental Setup
6.2. Experiment Results
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wyffels, J.; Goemaere, J.P.; Verhoeve, P.; Crombez, P.; Nauwelaers, B.; De Strycker, L. A novel indoor localization system for healthcare environments. In Proceedings of the 2012 25th IEEE International Symposium on Computer-Based Medical Systems (CBMS), Rome, Italy, 20–22 June 2012; pp. 1–6. [Google Scholar]
- Van Haute, T.; De Poorter, E.; Crombez, P.; Lemic, F.; Handziski, V.; Wirström, N.; Wolisz, A.; Voigt, T.; Moerman, I. Performance analysis of multiple Indoor Positioning Systems in a healthcare environment. Int. J. Health Geogr. 2016, 15, 7. [Google Scholar] [CrossRef] [Green Version]
- Leung, C.S.; Sum, J.; So, H.C.; Constantinides, A.G.; Chan, F.K.W. Lagrange programming neural networks for time-of-arrival-based source localization. Neural Comput. Appl. 2014, 24, 109–116. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Gidlund, M. Experimental e-Health Applications in Wireless Sensor Networks. In Proceedings of the 2009 WRI International Conference on Communications and Mobile Computing, Kunming, China, 6–8 January 2009; Volume 1, pp. 563–567. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, R.W.; Wong, A.K.; Lea, C.; Chiang, M. Indoor Location Estimation with Reduced Calibration Exploiting Unlabeled Data via Hybrid Generative/Discriminative Learning. IEEE Trans. Mob. Comput. 2012, 11, 1613–1626. [Google Scholar] [CrossRef]
- Henningsson, M.; Tunestål, P.; Johansson, R. A virtual sensor for predicting diesel engine emissions from cylinder pressure data. IFAC Proc. Vol. 2012, 45, 424–431. [Google Scholar] [CrossRef] [Green Version]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Rosenblatt, F. The perceptron: A probabilistic model for information storage and organization in the brain. Psychol. Rev. 1958, 65, 386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Widrow, B.; Hoff, M.E. Adaptive Switching Circuits; Technical Report; Stanford University Electronics Labs: Stanford, CA, USA, 1960. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Hecht-Nielsen, R. Kolmogorov’s mapping neural network existence theorem. In Proceedings of the International Conference on Neural Networks, San Diego, CA, USA, 21–24 June 1987; IEEE Press: New York, NY, USA, 1987; Volume 3, pp. 11–14. [Google Scholar]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Hecht-Nielsen, R. Theory of the backpropagation neural network. In Neurocomputing; Addison-Wesley: Boston, MA, USA, 1989; p. 433. [Google Scholar]
- Alwakeel, S.S.; Alhalabi, B.; Aggoune, H.; Alwakeel, M. A machine learning based WSN system for autism activity recognition. In Proceedings of the 2015 IEEE 14th International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 9–11 December 2015; pp. 771–776. [Google Scholar]
- Mahfouz, S.; Mourad-Chehade, F.; Honeine, P.; Farah, J.; Snoussi, H. Kernel-based machine learning using radio-fingerprints for localization in wsns. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1324–1336. [Google Scholar] [CrossRef]
- Huang, H.Y.; Hsieh, C.Y.; Liu, K.C.; Cheng, H.C.; Hsu, S.J.; Chan, C.T. Multi-Sensor Fusion Approach for Improving Map-Based Indoor Pedestrian Localization. Sensors 2019, 19, 3786. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Chen, R.; Li, D.; Chen, Y.; Guo, G.; Cao, Z.; Pan, Y. Scene recognition for indoor localization using a multi-sensor fusion approach. Sensors 2017, 17, 2847. [Google Scholar] [CrossRef] [Green Version]
- Sarbadhikari, S.N.; Basak, J.; Pal, S.K.; Kundu, M.K. Noisy fingerprints classification with directional FFT based features using MLP. Neural Comput. Appl. 1998, 7, 180–191. [Google Scholar] [CrossRef]
- Luo, Q.; Yan, X.; Li, J.; Peng, Y.; Tang, Y.; Wang, J.; Wang, D. DEDF: Lightweight WSN distance estimation using RSSI data distribution-based fingerprinting. Neural Comput. Appl. 2016, 27, 1567–1575. [Google Scholar] [CrossRef]
- Ibrahim, A.; Rahim, S.K.A.; Mohamad, H. Performance evaluation of RSS-based WSN indoor localization scheme using artificial neural network schemes. In Proceedings of the 2015 IEEE 12th Malaysia International Conference on Communications (MICC), Kuching, Malaysia, 23–25 November 2015; pp. 300–305. [Google Scholar]
- Zhang, H.; Liu, K.; Jin, F.; Feng, L.; Lee, V.; Ng, J. A scalable indoor localization algorithm based on distance fitting and fingerprint mapping in Wi-Fi environments. Neural Comput. Appl. 2019. [Google Scholar] [CrossRef]
- Jiang, X.; Liu, J.; Chen, Y.; Liu, D.; Gu, Y.; Chen, Z. Feature Adaptive Online Sequential Extreme Learning Machine for lifelong indoor localization. Neural Comput. Appl. 2016, 27, 215–225. [Google Scholar] [CrossRef]
- Vandersmissen, B.; Knudde, N.; Jalalvand, A.; Couckuyt, I.; Dhaene, T.; De Neve, W. Indoor human activity recognition using high-dimensional sensors and deep neural networks. Neural Comput. Appl. 2019. [Google Scholar] [CrossRef]
- Rao, X.; Li, Z. MSDFL: A robust minimal hardware low-cost device-free WLAN localization system. Neural Comput. Appl. 2019, 31, 9261–9278. [Google Scholar] [CrossRef]
- Qin, F.; Zuo, T.; Wang, X. CCpos: WiFi Fingerprint Indoor Positioning System Based on CDAE-CNN. Sensors 2021, 21, 1114. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Wang, L.; Xiong, S. Using Machine Learning Methods to Provision Virtual Sensors in Sensor-Cloud. Sensors 2020, 20, 1836. [Google Scholar] [CrossRef] [Green Version]
- Del Hougne, P.; Imani, M.F.; Fink, M.; Smith, D.R.; Lerosey, G. Precise Localization of Multiple Noncooperative Objects in a Disordered Cavity by Wave Front Shaping. Phys. Rev. Lett. 2018, 121, 063901. [Google Scholar] [CrossRef] [Green Version]
- Del Hougne, P. Robust position sensing with wave fingerprints in dynamic complex propagation environments. Phys. Rev. Res. 2020, 2, 043224. [Google Scholar] [CrossRef]
- del Hougne, M.; Gigan, S.; del Hougne, P. Deeply Sub-Wavelength Localization with Reverberation-Coded-Aperture. arXiv 2021, arXiv:2102.05642. [Google Scholar]
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with a Single WiFi Access Point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI 16), Santa Clara, CA, USA, 16–18 March 2016; USENIX Association: Santa Clara, CA, USA, 2016; pp. 165–178. [Google Scholar]
- Kumar, S.; Gil, S.; Katabi, D.; Rus, D. Accurate Indoor Localization with Zero Start-up Cost. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, MobiCom ’14, Maui, Hawaii, 7–11 September 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 483–494. [Google Scholar] [CrossRef]
- Adib, F.; Kabelac, Z.; Katabi, D. Multi-Person Localization via RF Body Reflections. In Proceedings of the 12th USENIX Conference on Networked Systems Design and Implementation, NSDI’15, Okaland, CA, USA, 4–6 May 2015; pp. 279–292. [Google Scholar]
- Lampoltshammer, T.J.; Pignaton de Freitas, E.; Nowotny, T.; Plank, S.; Da Costa, J.P.C.L.; Larsson, T.; Heistracher, T. Use of Local Intelligence to Reduce Energy Consumption of Wireless Sensor Nodes in Elderly Health Monitoring Systems. Sensors 2014, 14, 4932–4947. [Google Scholar] [CrossRef]
- Cardoso, D.T.; Manfroi, D.; de Freitas, E.P. Improvement in the Detection of Passengers in Public Transport Systems by Using UHF RFID. Int. J. Wirel. Inf. Netw. 2020, 27, 116–132. [Google Scholar] [CrossRef]
- Tavares Bruscato, L.; Heimfarth, T.; Pignaton de Freitas, E. Enhancing Time Synchronization Support in Wireless Sensor Networks. Sensors 2017, 17, 2956. [Google Scholar] [CrossRef] [Green Version]
- Bacciu, D.; Barsocchi, P.; Chessa, S.; Gallicchio, C.; Micheli, A. An experimental characterization of reservoir computing in ambient assisted living applications. Neural Comput. Appl. 2014, 24, 1451–1464. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Results | Linear | ANN (t−1) | ANN (t−2) | ANN (t−3) | ANN (t−4) | ANN (t−5) |
|---|---|---|---|---|---|---|
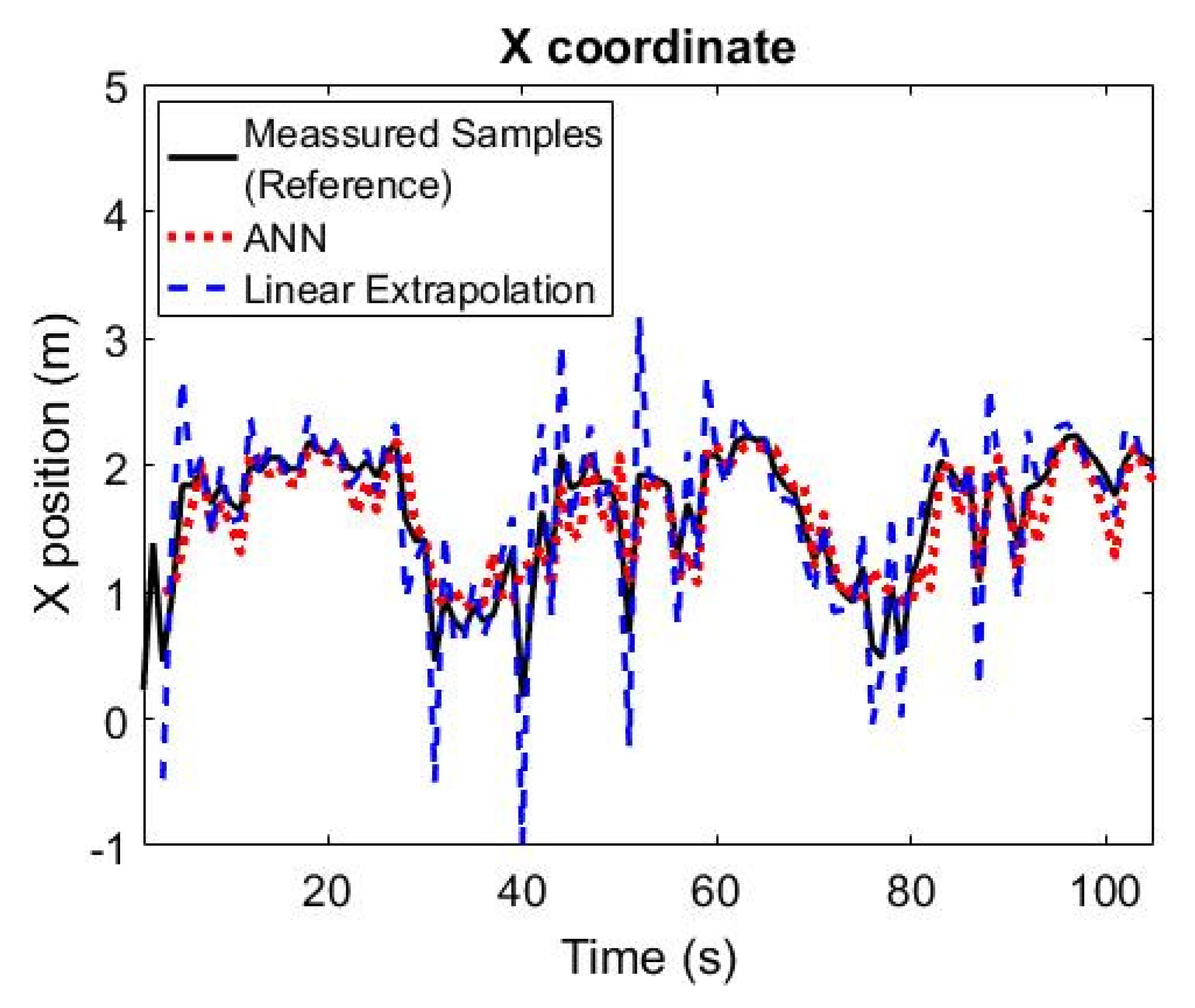
| MAE X (m) | 0.263 | 0.199 | 0.220 | 0.219 | 0.230 | 0.249 |
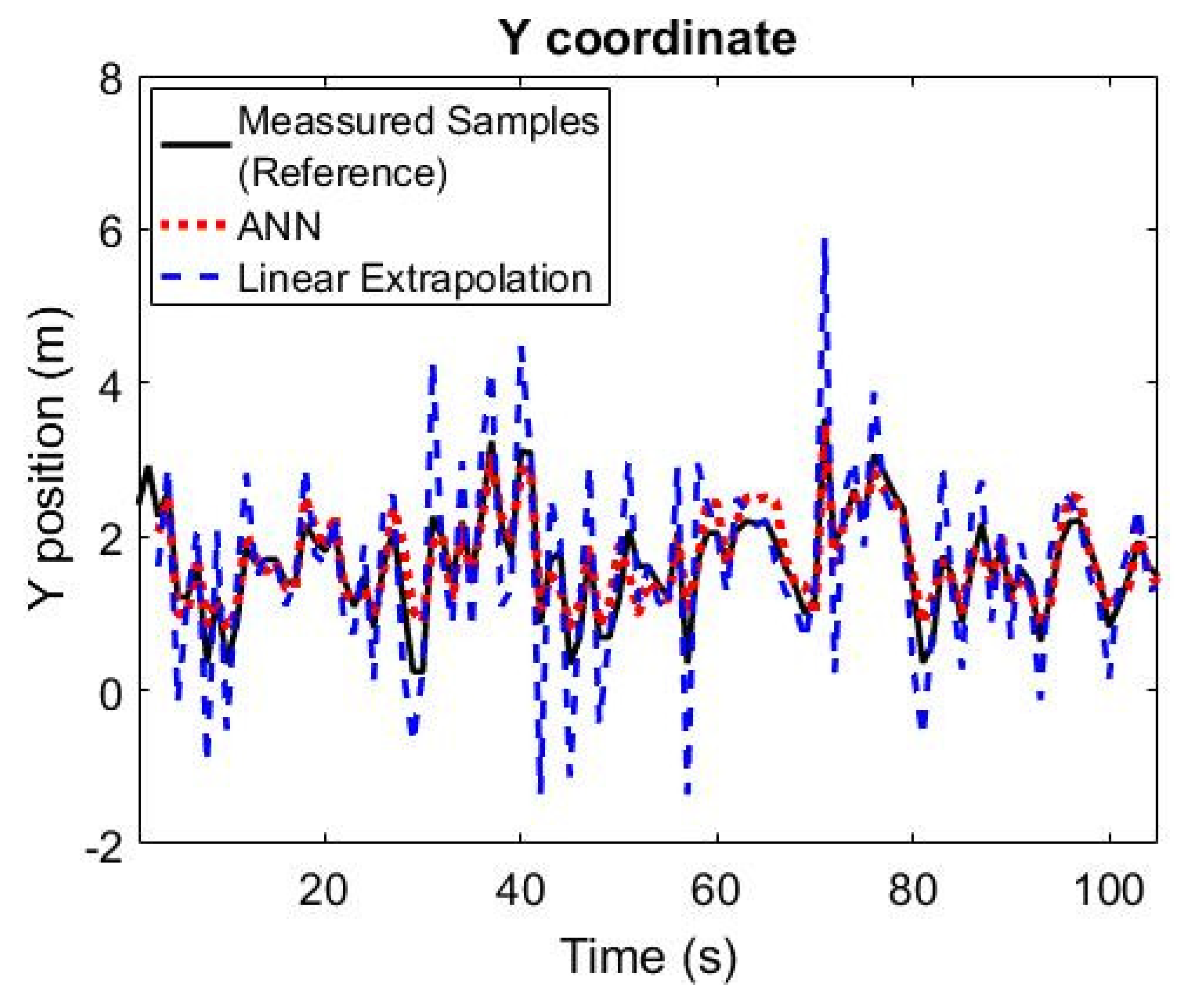
| MAE Y (m) | 0.572 | 0.222 | 0.275 | 0.299 | 0.255 | 0.235 |
| STD X (m) | 0.384 | 0.270 | 0.303 | 0.295 | 0.308 | 0.323 |
| STD Y (m) | 0.752 | 0.281 | 0.352 | 0.384 | 0.357 | 0.329 |
| RMSE X (m) | 0.382 | 0.271 | 0.302 | 0.296 | 0.306 | 0.323 |
| RMSE Y (m) | 0.749 | 0.287 | 0.351 | 0.382 | 0.357 | 0.331 |
| Nash X | 0.438 | 0.716 | 0.641 | 0.657 | 0.632 | 0.592 |
| Nash Y | −0.222 | 0.820 | 0.727 | 0.677 | 0.718 | 0.758 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pedrollo, G.; Konzen, A.A.; de Morais, W.O.; Pignaton de Freitas, E. Using Smart Virtual-Sensor Nodes to Improve the Robustness of Indoor Localization Systems. Sensors 2021, 21, 3912. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113912
Pedrollo G, Konzen AA, de Morais WO, Pignaton de Freitas E. Using Smart Virtual-Sensor Nodes to Improve the Robustness of Indoor Localization Systems. Sensors. 2021; 21(11):3912. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113912
Chicago/Turabian StylePedrollo, Guilherme, Andréa Aparecida Konzen, Wagner Ourique de Morais, and Edison Pignaton de Freitas. 2021. "Using Smart Virtual-Sensor Nodes to Improve the Robustness of Indoor Localization Systems" Sensors 21, no. 11: 3912. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113912