
Medical Images Encryption Based on Adaptive-Robust Multi-Mode Synchronization of Chen Hyper-Chaotic Systems

 , , , , and
, , , , and 
Abstract
:1. Introduction
2. Formulation of the Theorem
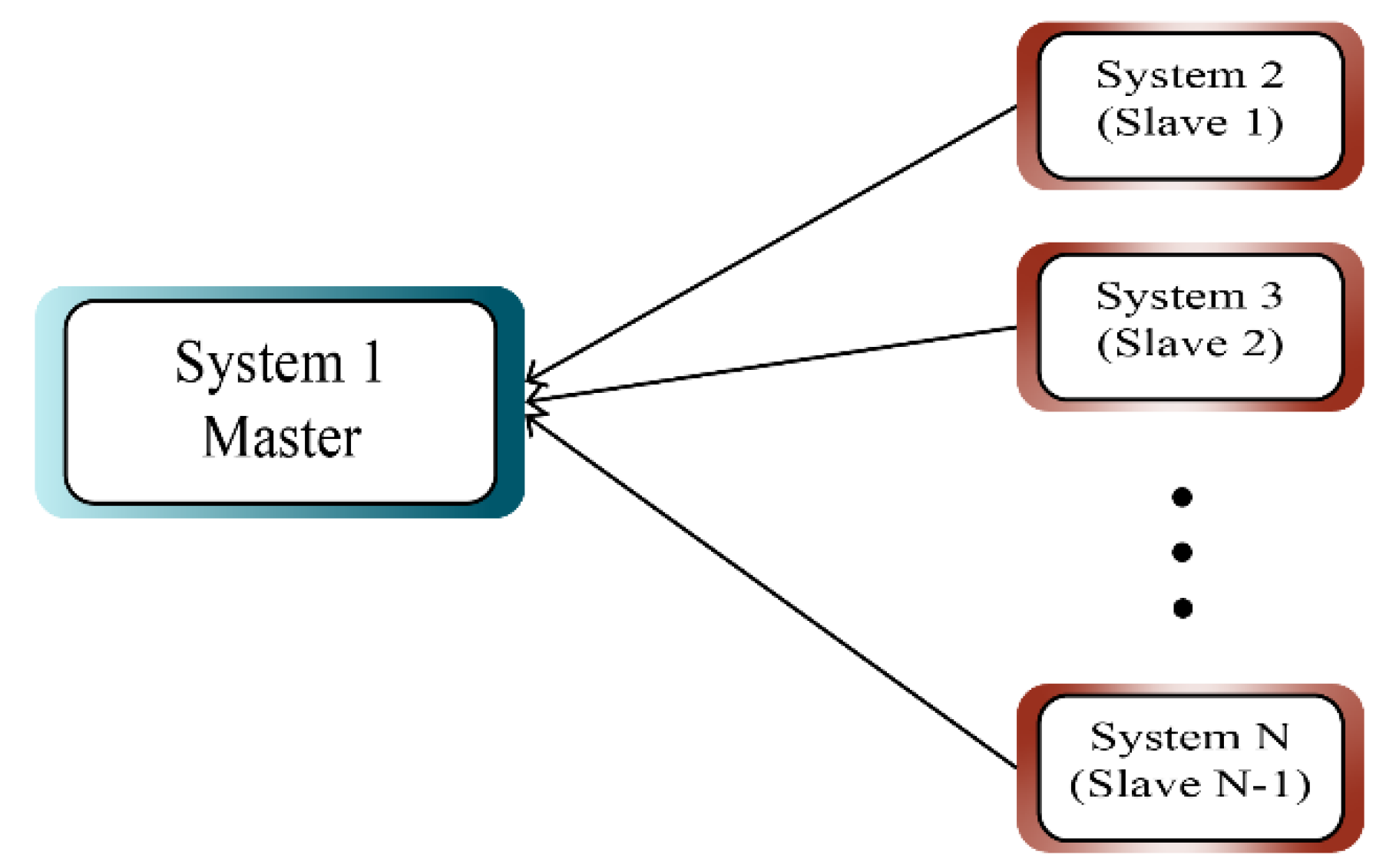
2.1. Comparative Synchronization between More Response Systems and a Master System
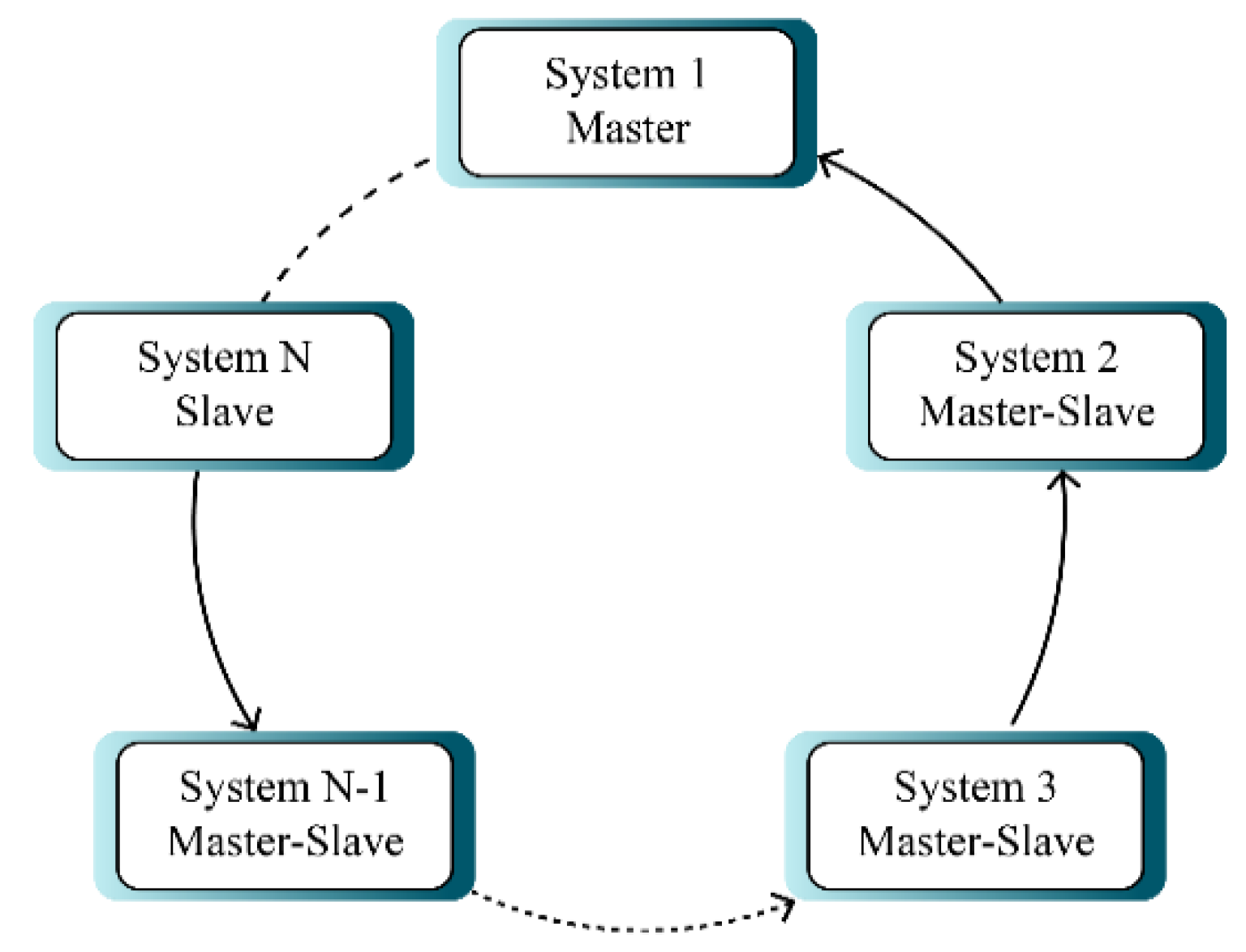
2.2. Circular Synchronization of Multiple Chaotic Systems with Unknown Parameters
- (A)
- If there is a transmission and circular synchronization with the u(t) and m(t) controllers. Then:
- (B)
- If transmission synchronization is established, circular synchronization is also realized and vice versa.
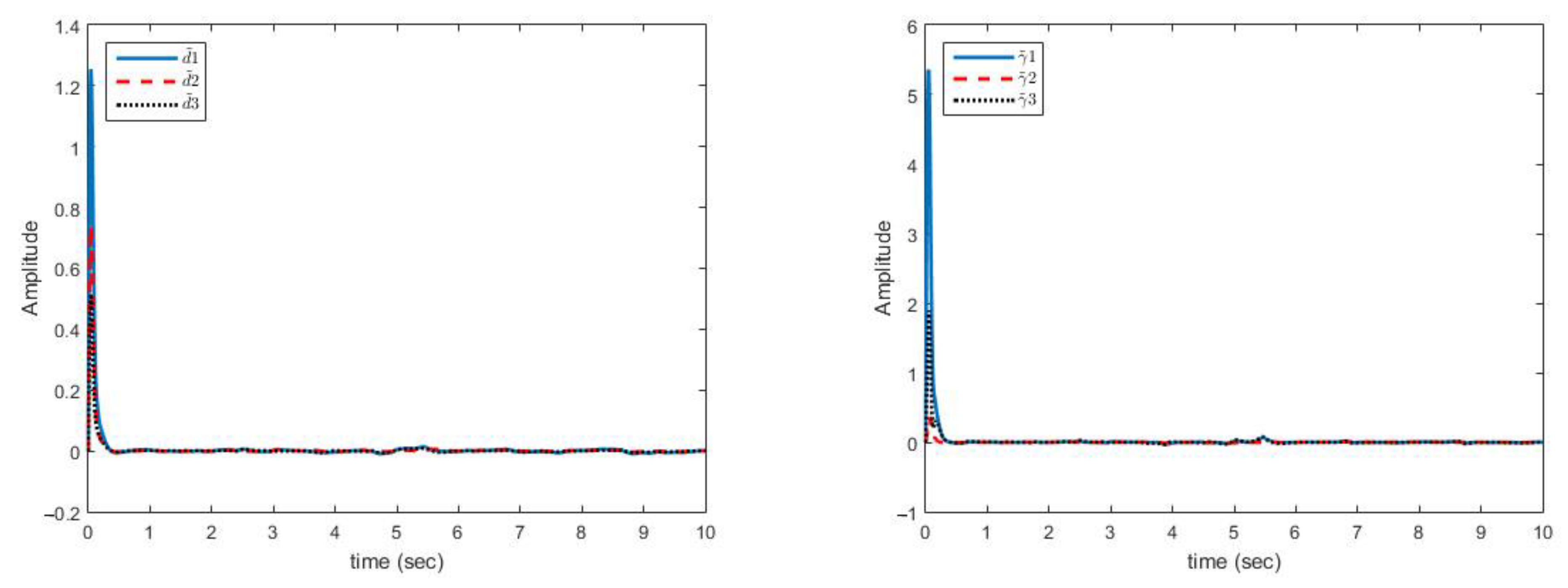
2.3. Synchronization with the Presence of Disturbance and Uncertainty in the System
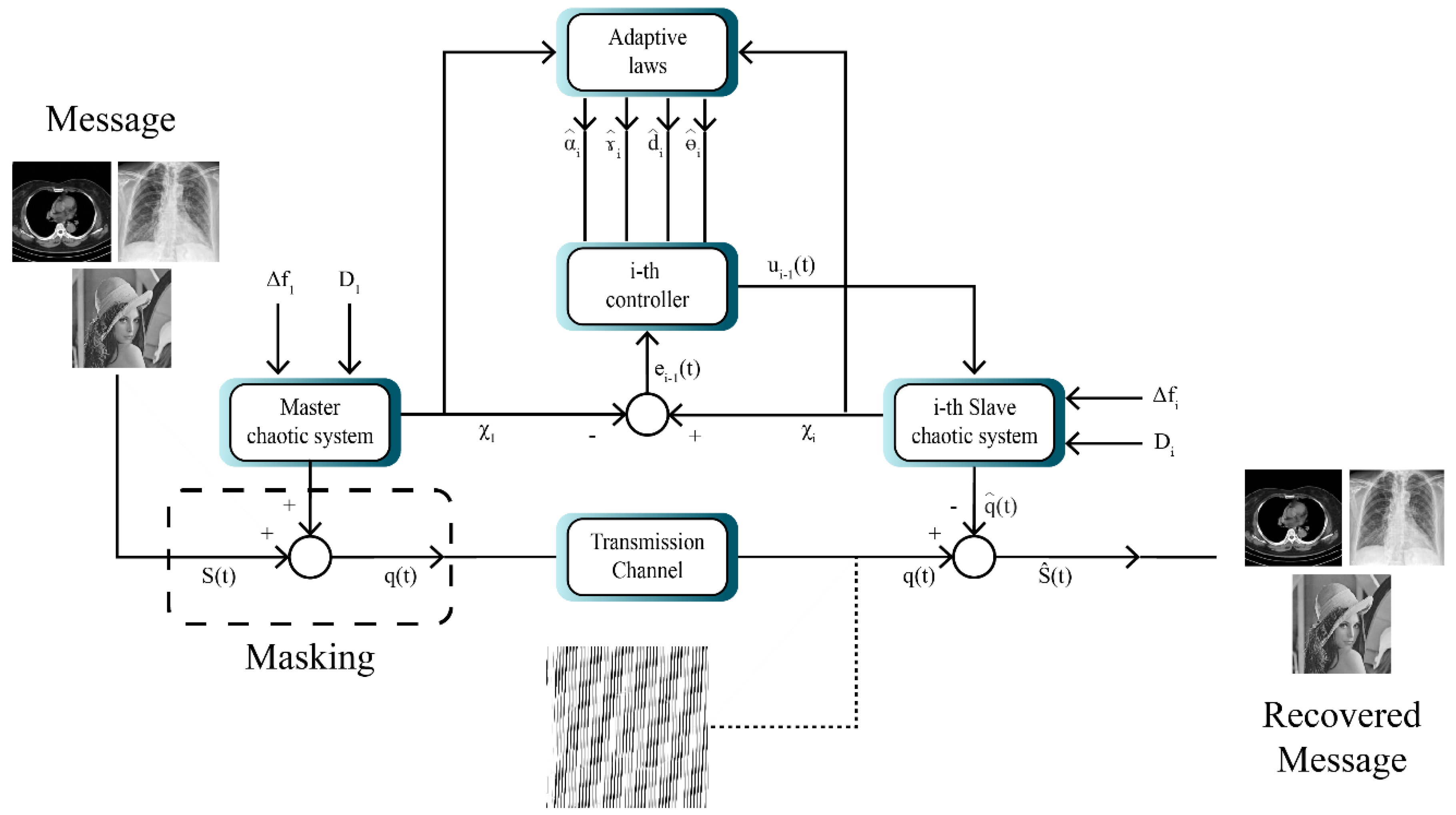
3. Application in Secure Communication Based on Chaotic Masking
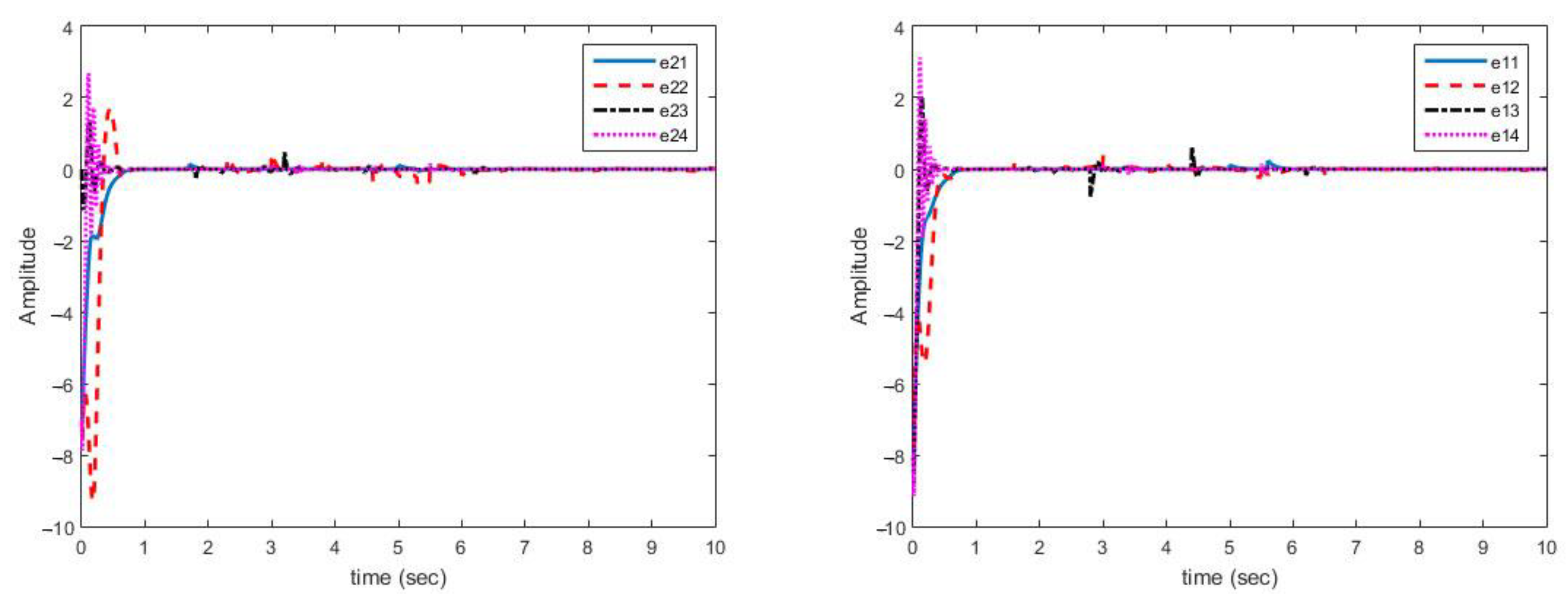
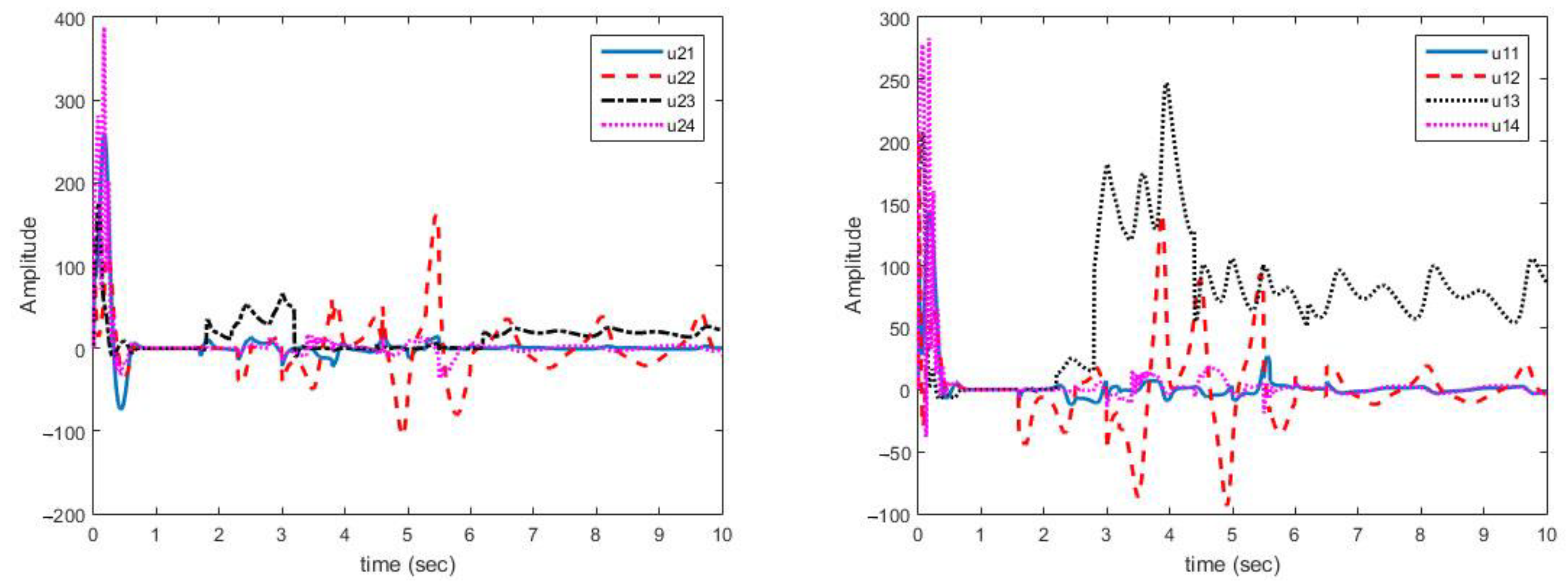
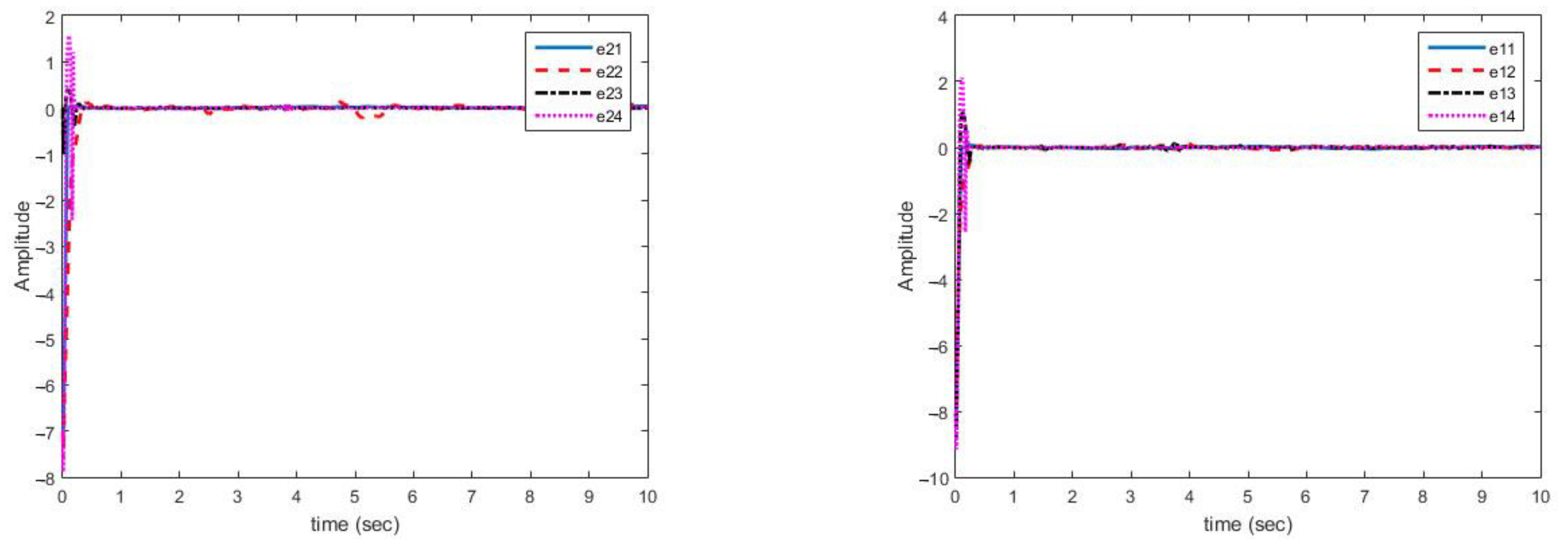
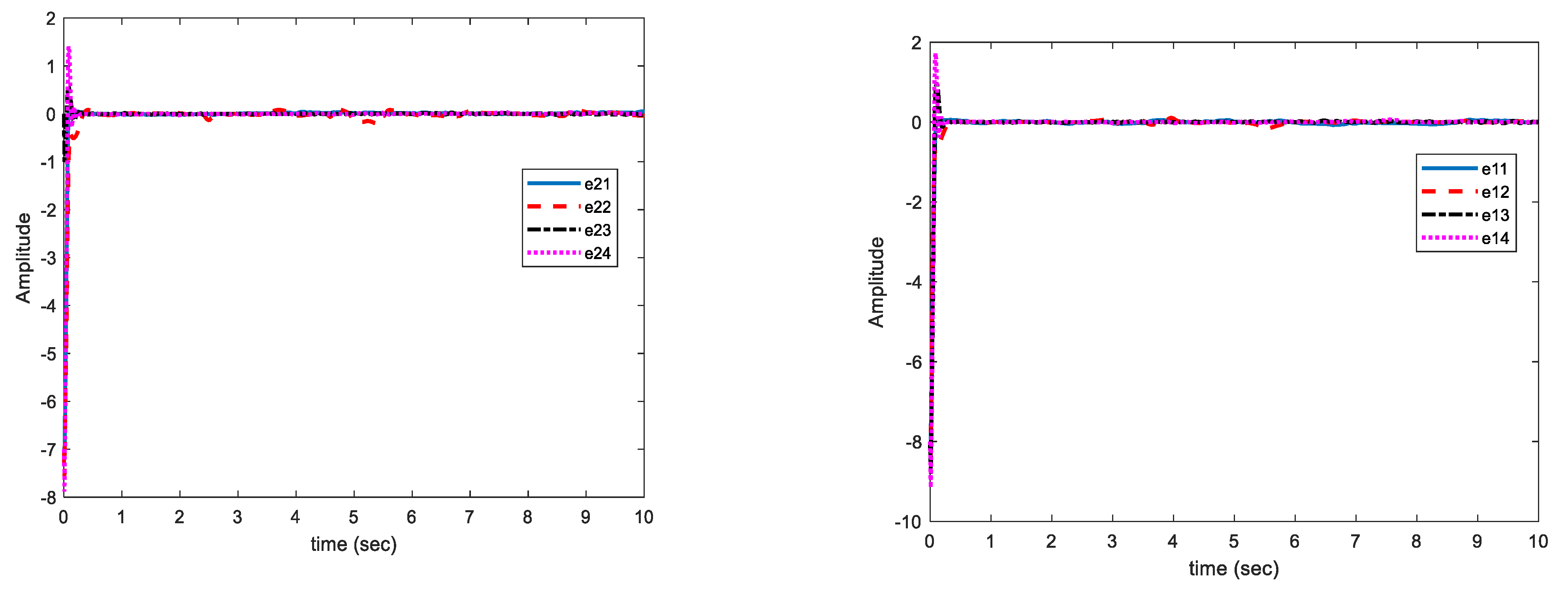
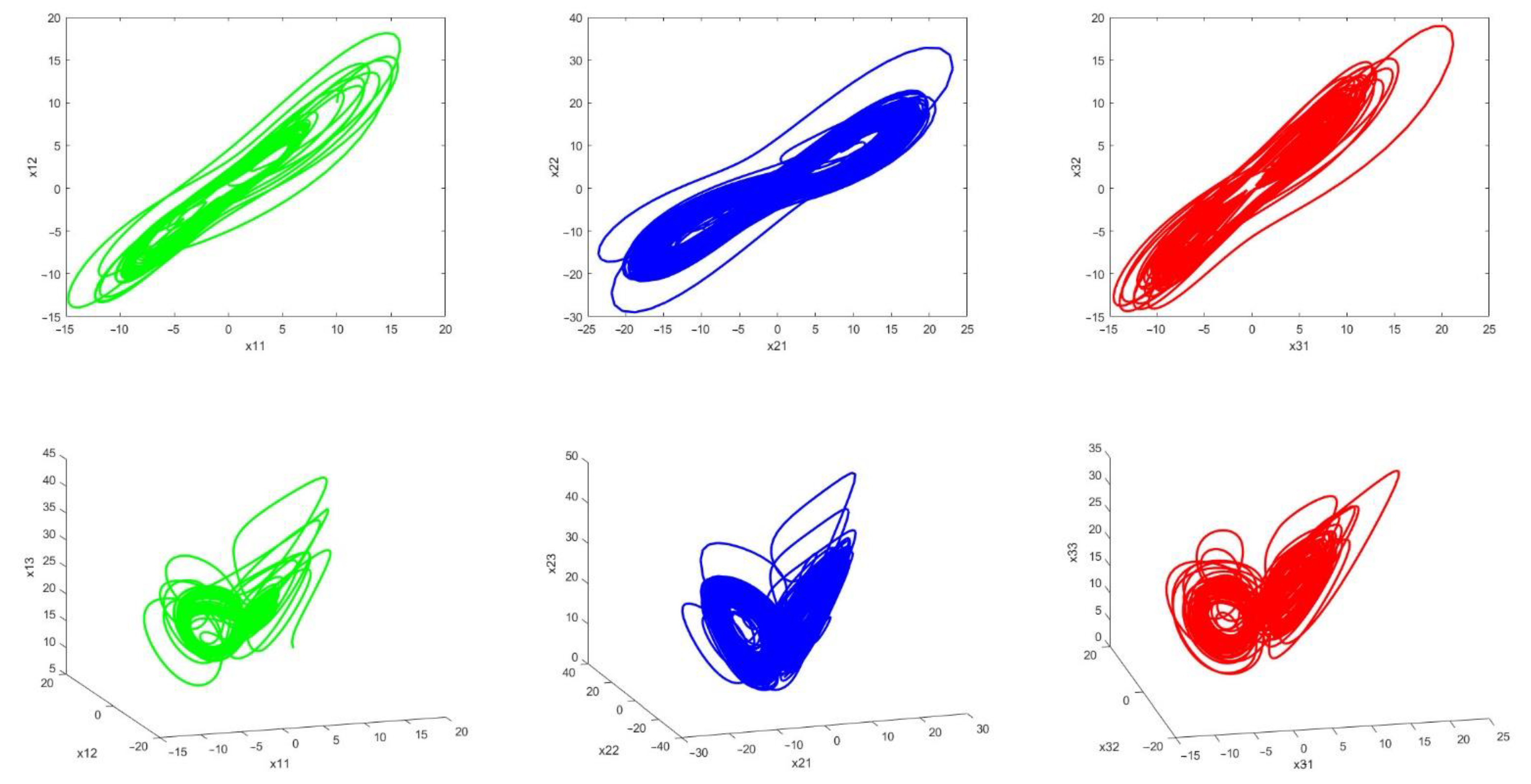
4. Implementation of the Proposed Synchronization Method on Chen Hyper-Chaotic System
(x21(0), x22(0), x23(0), x24(0)) = (2, 2, 2, 2)
(x31(0), x32(0), x33(0), x34(0)) = (3, 3, 3, 3)
5. Statistical Metrics
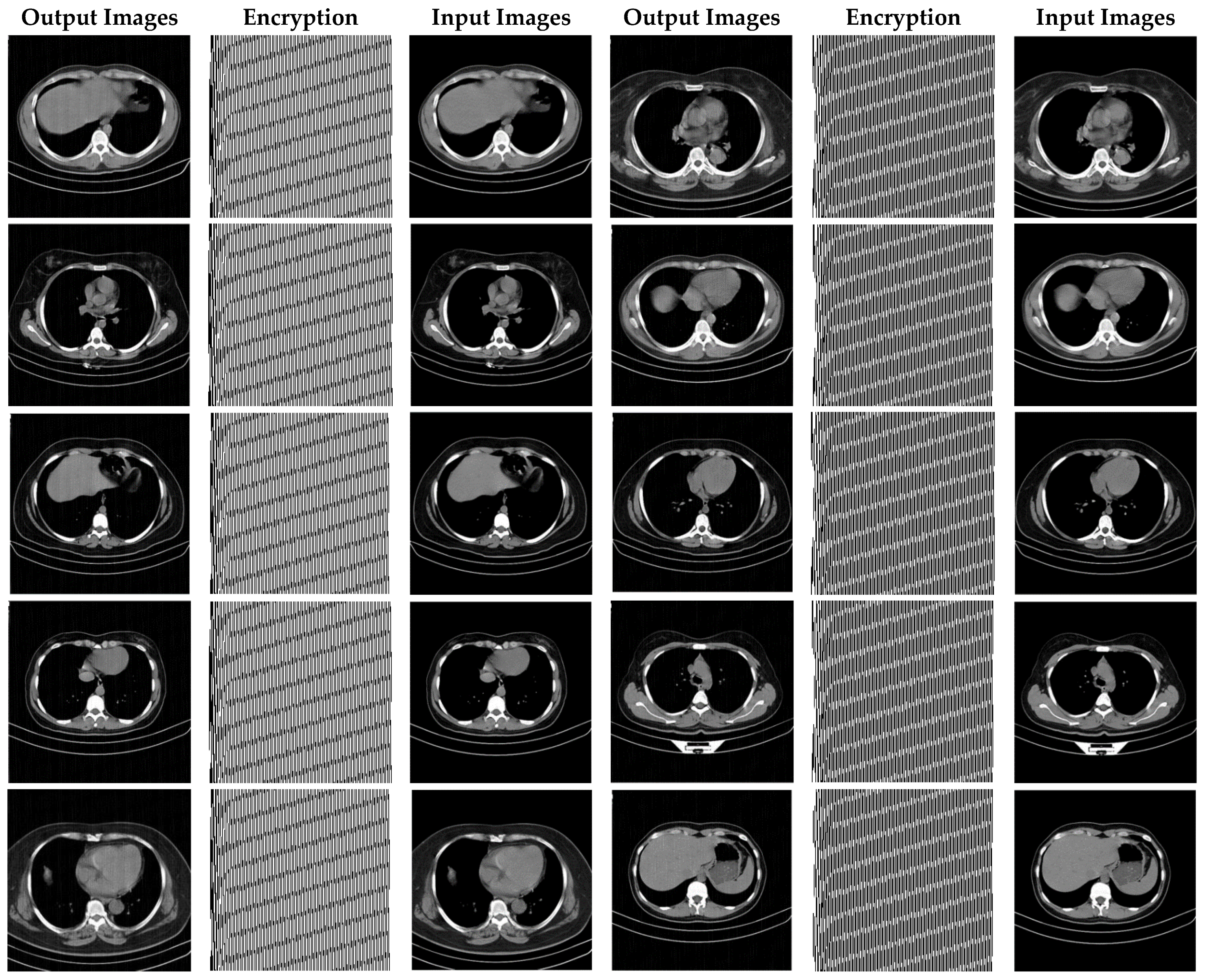
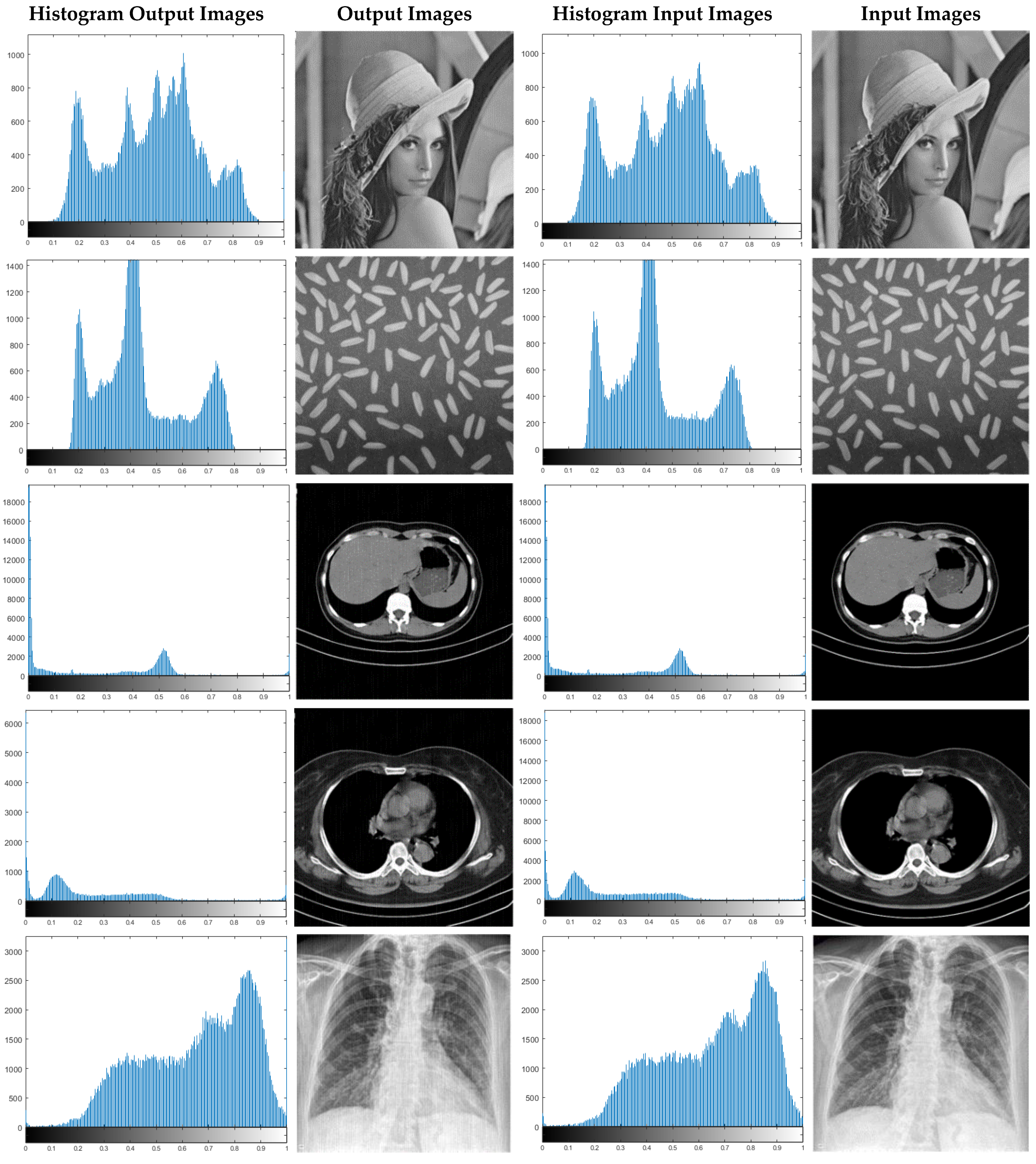
5.1. Histogram Analysis
5.2. Correlation Analysis
5.3. Differential Attack Analysis
5.4. PSNR Analysis
5.5. Information Entropy Analysis
6. Experiment Results
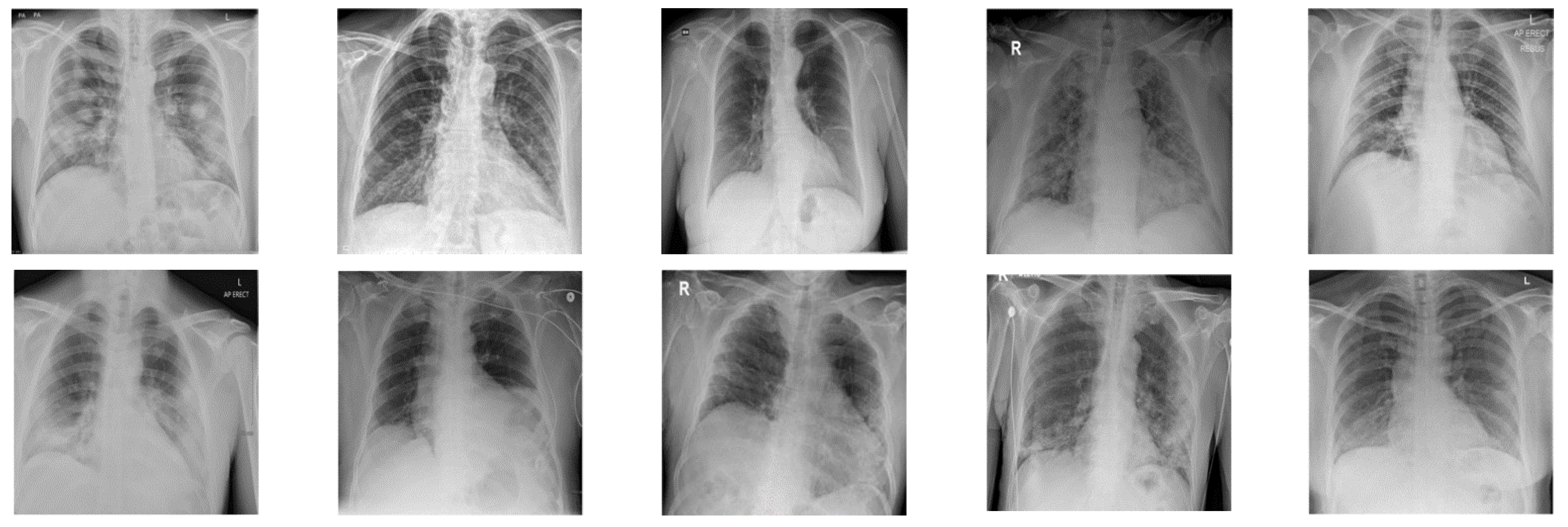
6.1. Image Benchmarks
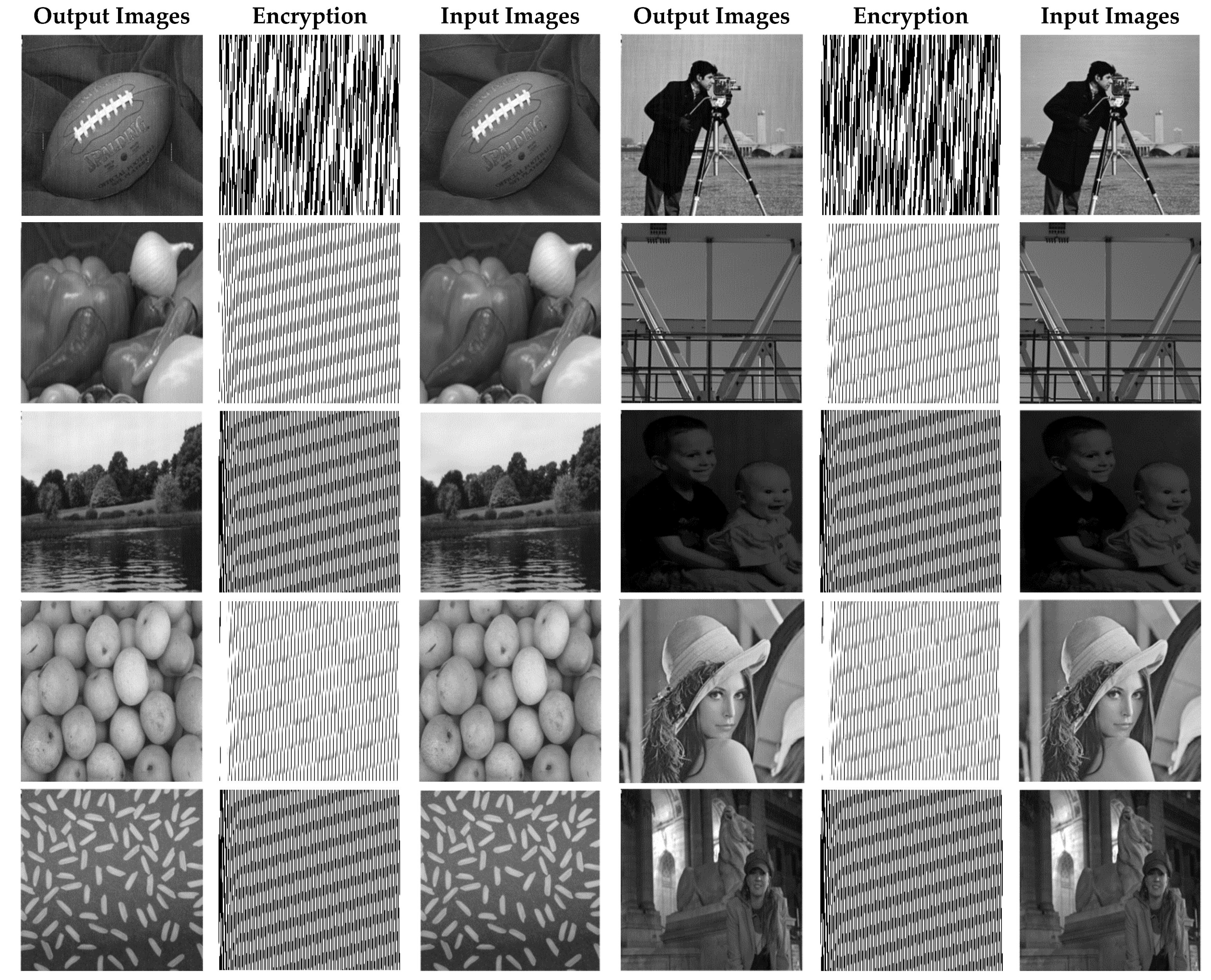
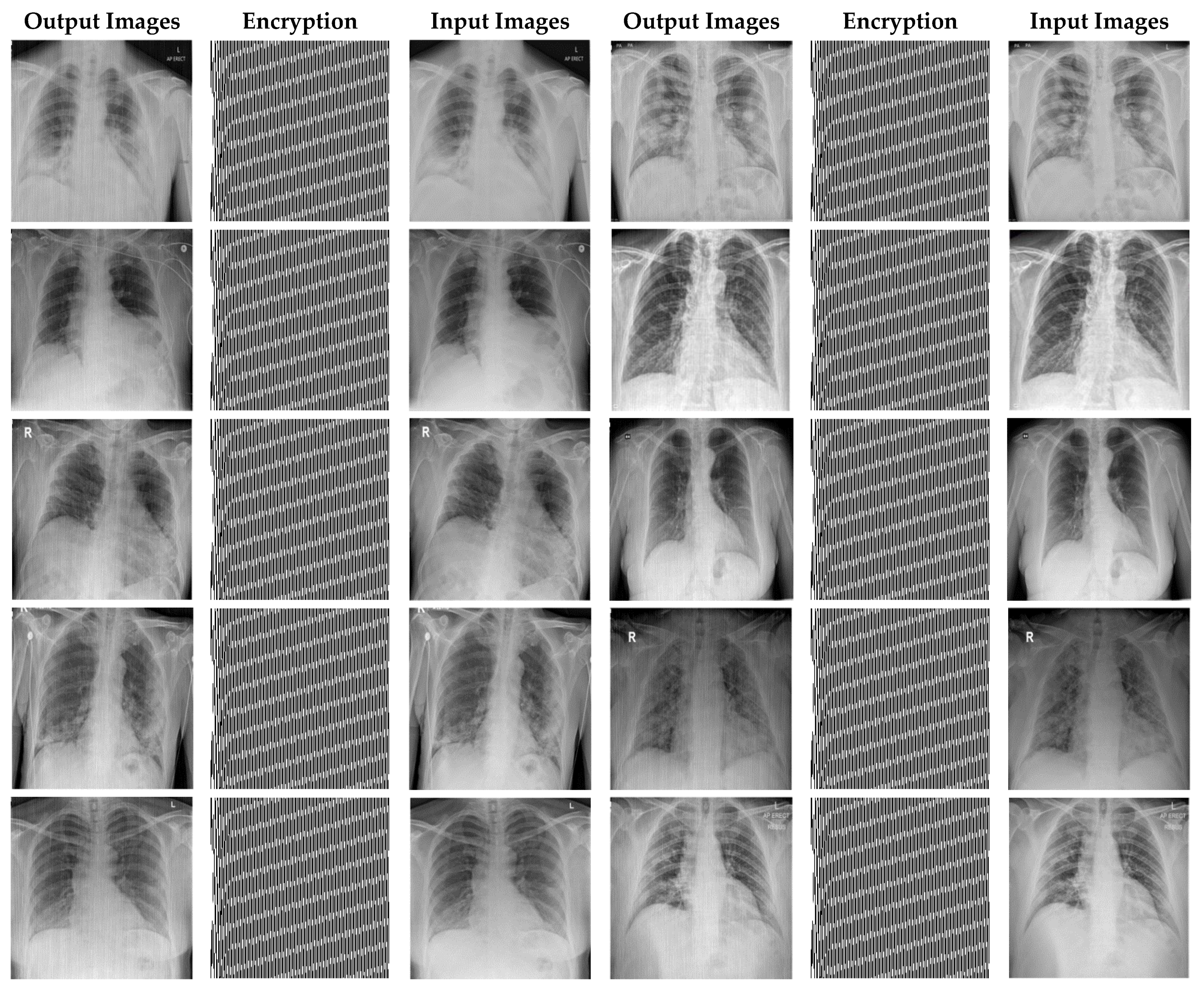
6.2. Simulation
7. Advantages and Disadvantages
8. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fadhil, A. Beyond patient monitoring: Conversational agents role in telemedicine & healthcare support for home-living elderly individuals. arXiv 2018, arXiv:1803.06000. [Google Scholar]
- Wijesinghe, I.; Gamage, C.; Perera, I.; Chitraranjan, C. A smart telemedicine system with deep learning to manage diabetic retinopathy and foot ulcers. In Proceedings of the 2019 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 3–5 July 2019; pp. 686–691. [Google Scholar]
- Leite, H.; Hodgkinson, I.R.; Gruber, T. New development: ‘Healing at a distance’—Telemedicine and COVID-19. Public Money Manag. 2020, 40, 483–485. [Google Scholar] [CrossRef] [Green Version]
- Portnoy, J.; Waller, M.; Elliott, T. Telemedicine in the era of COVID-19. J. Allergy Clin. Immunol. Pract. 2020, 8, 1489–1491. [Google Scholar] [CrossRef]
- Angelucci, A.; Kuller, D.; Aliverti, A. A home telemedicine system for continuous respiratory monitoring. IEEE J. Biomed. Health Inform. 2020, 25, 1247–1256. [Google Scholar] [CrossRef] [PubMed]
- Garg, V.; Brewer, J. Telemedicine security: A systematic review. J. Diabetes Sci. Technol. 2011, 5, 768–777. [Google Scholar] [CrossRef] [PubMed]
- Abou El Kalam, A.; Ferreira, A.; Kratz, F. Bilateral teleoperation system using QoS and secure communication networks for telemedicine applications. IEEE Syst. J. 2015, 10, 709–720. [Google Scholar] [CrossRef]
- Rezaeibagha, F.; Mu, Y. Practical and secure telemedicine systems for user mobility. J. Biomed. Inform. 2018, 78, 24–32. [Google Scholar] [CrossRef]
- Murillo-Escobar, M.A.; Meranza-Castillón, M.O.; López-Gutiérrez, R.M.; Cruz-Hernández, C. Suggested integral analysis for chaos-based image cryptosystems. Entropy 2019, 21, 815. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alvarez, G.; Li, S. Some basic cryptographic requirements for chaos-based cryptosystems. Int. J. Bifurc. Chaos 2006, 16, 2129–2151. [Google Scholar] [CrossRef] [Green Version]
- Mirrezapour, S.Z.; Zare, A. A new fractional sliding mode controller based on nonlinear fractional-order proportional integral derivative controller structure to synchronize fractional-order chaotic systems with uncertainty and disturbances. J. Vib. Control. 2021. [Google Scholar] [CrossRef]
- Kekha Javan, A.A.; Shoeibi, A.; Zare, A.; Hosseini Izadi, N.; Jafari, M.; Alizadehsani, R.; Moridian, P.; Mosavi, A.; Acharya, U.R.; Nahavandi, S. Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication. Sensors 2021, 21, 254. [Google Scholar] [CrossRef] [PubMed]
- Zare, A.; Mirrezapour, S.Z.; Hallaji, M.; Shoeibi, A.; Jafari, M.; Ghassemi, N.; Alizadehsani, R.; Mosavi, A. Robust Adaptive Synchronization of a Class of Uncertain Chaotic Systems with Unknown Time-Delay. Appl. Sci. 2020, 10, 8875. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef] [PubMed]
- Sweetha, S.; Sakthivel, R.; Harshavarthini, S. Finite-time synchronization of nonlinear fractional chaotic systems with stochastic actuator faults. Chaos Solitons Fractals 2021, 142, 110312. [Google Scholar] [CrossRef]
- Yang, F.; Mou, J.; Ma, C.; Cao, Y. Dynamic analysis of an improper fractional-order laser chaotic system and its image encryption application. Opt. Lasers Eng. 2020, 129, 106031. [Google Scholar] [CrossRef]
- Lin, C.F.; Shih, S.H.; Zhu, J.D. Chaos based encryption system for encrypting electroencephalogram signals. J. Med. Syst. 2014, 38, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Murillo-Escobar, M.A.; Cardoza-Avendaño, L.; López-Gutiérrez, R.M.; Cruz-Hernández, C. A double chaotic layer encryption algorithm for clinical signals in telemedicine. J. Med. Syst. 2017, 41, 59. [Google Scholar] [CrossRef] [PubMed]
- Shahzadi, R.; Anwar, S.M.; Qamar, F.; Ali, M.; Rodrigues, J.J.; Alnowami, M. Secure EEG signal transmission for remote health monitoring using optical chaos. IEEE Access 2019, 7, 57769–57778. [Google Scholar] [CrossRef]
- Chen, J.; Ling, B.W.K.; Feng, P.; Lei, R. Computer cryptography through performing chaotic modulation on intrinsic mode functions with non-dyadic number of encrypted signals. IET Signal. Process. 2018, 13, 7–13. [Google Scholar] [CrossRef]
- Ibrahim, S.; Alhumyani, H.; Masud, M.; Alshamrani, S.S.; Cheikhrouhou, O.; Muhammad, G.; Hossain, M.S.; Abbas, A.M. Framework for Efficient Medical Image Encryption Using Dynamic S-Boxes and Chaotic Maps. IEEE Access 2020, 8, 160433–160449. [Google Scholar] [CrossRef]
- Gafsi, M.; Abbassi, N.; Hajjaji, M.A.; Malek, J.; Mtibaa, A. Improved Chaos-Based Cryptosystem for Medical Image Encryption and Decryption. Sci. Program. 2020, 2020, 6612390. [Google Scholar]
- Kumar, S.; Panna, B.; Jha, R.K. Medical image encryption using fractional discrete cosine transform with chaotic function. Med. Biol. Eng. Comput. 2019, 57, 2517–2533. [Google Scholar] [CrossRef]
- Liu, J.; Tang, S.; Lian, J.; Ma, Y.; Zhang, X. A novel fourth order chaotic system and its algorithm for medical image encryption. Multidimens. Syst. Signal. Process. 2019, 30, 1637–1657. [Google Scholar] [CrossRef]
- Stalin, S.; Maheshwary, P.; Shukla, P.K.; Maheshwari, M.; Gour, B.; Khare, A. Fast and secure medical image encryption based on non linear 4D logistic map and DNA sequences (NL4DLM_DNA). J. Med. Syst. 2019, 43, 1–17. [Google Scholar] [CrossRef]
- Banday, S.A.; Mir, A.H.; Malik, S. Multilevel medical image encryption for secure communication. In Advances in Computational Techniques for Biomedical Image Analysis; Academic Press: Cambridge, MA, USA, 2020; pp. 233–252. [Google Scholar]
- Chai, X.; Zhang, J.; Gan, Z.; Zhang, Y. Medical image encryption algorithm based on Latin square and memristive chaotic system. Multimed. Tools Appl. 2019, 78, 35419–35453. [Google Scholar] [CrossRef]
- Choi, U.S.; Cho, S.J.; Kang, S.W. Color medical image encryption using 3D Chaotic Cat Map and NCA. In Proceedings of the 2019 10th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Canary Islands, Spain, 24–26 June 2019; pp. 1–5. [Google Scholar]
- Dagadu, J.C.; Li, J.; Shah, F. An efficient di-chaotic diffusion based medical image cryptosystem. In Proceedings of the 2017 14th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 15–17 December 2017; pp. 206–210. [Google Scholar]
- Ismail, S.M.; Said, L.A.; Radwan, A.G.; Madian, A.H.; Abu-Elyazeed, M.F. Generalized double-humped logistic map-based medical image encryption. J. Adv. Res. 2018, 10, 85–98. [Google Scholar] [CrossRef]
- Li, X.; Wu, F.; Khan, M.K.; Xu, L.; Shen, J.; Jo, M. A secure chaotic map-based remote authentication scheme for telecare medicine information systems. Future Gener. Comput. Syst. 2018, 84, 149–159. [Google Scholar] [CrossRef]
- Pandey, A.; Singh, B.; Saini, B.S.; Sood, N. A novel fused coupled chaotic map based confidential data embedding-then-encryption of electrocardiogram signal. Biocybern. Biomed. Eng. 2019, 39, 282–300. [Google Scholar] [CrossRef]
- Sangavi, V.; Thangavel, P. An exotic multi-dimensional conceptualization for medical image encryption exerting Rossler system and Sine map. J. Inf. Secur. Appl. 2020, 55, 102626. [Google Scholar]
- Thakur, S.; Singh, A.K.; Ghrera, S.P.; Elhoseny, M. Multi-layer security of medical data through watermarking and chaotic encryption for tele-health applications. Multimed. Tools Appl. 2019, 78, 3457–3470. [Google Scholar] [CrossRef]
- Zheng, L.; Wang, Z.; Tian, S. Comparative study on electrocardiogram encryption using elliptic curves cryptography and data encryption standard for applications in Internet of medical things. Concurr. Comput. Pract. Exp. 2020, e5776. [Google Scholar] [CrossRef]
- Murillo-Escobar, M.A.; Cruz-Hernández, C.; Abundiz-Pérez, F.; López-Gutiérrez, R.M.; Del Campo, O.A. A RGB image encryption algorithm based on total plain image characteristics and chaos. Signal. Process. 2015, 109, 119–131. [Google Scholar] [CrossRef]
- Ye, G.; Jiao, K.; Wu, H.; Pan, C.; Huang, X. An asymmetric image encryption algorithm based on a fractional-order chaotic system and the RSA public-key cryptosystem. Int. J. Bifurc. Chaos 2020, 30, 2050233. [Google Scholar] [CrossRef]
- Ding, L.; Ding, Q. A Novel Image Encryption Scheme Based on 2D Fractional Chaotic Map, DWT and 4D Hyper-chaos. Electronics 2020, 9, 1280. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, T.; Gao, L. A novel encryption frame for medical image with watermark based on hyperchaotic system. Math. Probl. Eng. 2014, 2014, 240749. [Google Scholar] [CrossRef]
- Ye, G.; Wong, K.W. An image encryption scheme based on time-delay and hyperchaotic system. Nonlinear Dyn. 2013, 71, 259–267. [Google Scholar] [CrossRef]
- Alizadehsani, R.; Roshanzamir, M.; Hussain, S.; Khosravi, A.; Koohestani, A.; Zangooei, M.H.; Abdar, M.; Beykikhoshk, A.; Shoeibi, A.; Zare, A.; et al. Handling of uncertainty in medical data using machine learning and probability theory techniques: A review of 30 years (1991–2020). Ann. Oper. Res. 2021, 1–42. [Google Scholar] [CrossRef]
- Ye, G.; Pan, C.; Dong, Y.; Shi, Y.; Huang, X. Image encryption and hiding algorithm based on compressive sensing and random numbers insertion. Signal. Process. 2020, 172, 107563. [Google Scholar] [CrossRef]
- Zhou, J.; Zhou, N.R.; Gong, L.H. Fast color image encryption scheme based on 3D orthogonal Latin squares and matching matrix. Opt. Laser Technol. 2020, 131, 106437. [Google Scholar] [CrossRef]
- Sharifrazi, D.; Alizadehsani, R.; Joloudari, J.H.; Shamshirband, S.; Hussain, S.; Sani, Z.A.; Hasanzadeh, F.; Shoaibi, A.; Dehzangi, A.; Alinejad-Rokny, H. CNN-KCL: Automatic Myocarditis Diagnosis using Convolutional Neural Network Combined with K-means Clustering. Preprints 2020. [Google Scholar] [CrossRef]
- Bashashati, A.; Fatourechi, M.; Ward, R.K.; Birch, G.E. A survey of signal processing algorithms in brain–computer interfaces based on electrical brain signals. J. Neural Eng. 2007, 4, R32. [Google Scholar] [CrossRef] [Green Version]
- Chow, L.S.; Paramesran, R. Review of medical image quality assessment. Biomed. Signal. Process. Control. 2016, 27, 145–154. [Google Scholar] [CrossRef]
- Jin, X.; Wang, Z.; Yang, H.; Song, Q.; Xiao, M. Synchronization of Multiplex Networks with Stochastic Perturbations via Pinning Adaptive Control. J. Frankl. Inst. 2021, 358, 3994–4012. [Google Scholar] [CrossRef]
- Ji, Y.; Gong, Y.; Su, S.; Bai, X. Fixed-Time Synchronization for Different Dimensional Complex Network Systems with Unknown Parameters via Adaptive Control. Complexity 2021, 2021, 6680287. [Google Scholar] [CrossRef]
- Mofid, O.; Momeni, M.; Mobayen, S.; Fekih, A. A Disturbance-Observer-Based Sliding Mode Control for the Robust Synchronization of Uncertain Delayed Chaotic Systems: Application to Data Security. IEEE Access 2021, 9, 16546–16555. [Google Scholar] [CrossRef]
- Yao, Q. Synchronization of second-order chaotic systems with uncertainties and disturbances using fixed-time adaptive sliding mode control. Chaos Solitons Fractals 2021, 142, 110372. [Google Scholar] [CrossRef]
- Balootaki, M.A.; Rahmani, H.; Moeinkhah, H.; Mohammadzadeh, A. Non-singleton fuzzy control for multi-synchronization of chaotic systems. Appl. Soft Comput. 2021, 99, 106924. [Google Scholar] [CrossRef]
- Soleimanizadeh, A.; Nekoui, M.A. Optimal type-2 fuzzy synchronization of two different fractional-order chaotic systems with variable orders with an application to secure communication. Soft Comput. 2021, 25, 6415–6426. [Google Scholar] [CrossRef]
- Rigatos, G.; Abbaszadeh, M. Nonlinear optimal control and synchronization for chaotic electronic circuits. J. Comput. Electron. 2021, 20, 1050–1063. [Google Scholar] [CrossRef]
- Motallebzadeh, F.; Motlagh MR, J.; Cherati, Z.R. Synchronization of different-order chaotic systems: Adaptive active vs. optimal control. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3643–3657. [Google Scholar] [CrossRef]
- Khan, A.; Kumar, S. TS fuzzy modeling and predictive control and synchronization of chaotic satellite systems. Int. J. Model. Simul. 2019, 39, 203–213. [Google Scholar] [CrossRef]
- Kaheni, H.R.; Yaghoobi, M. A new approach in anti-synchronization of a fractional-order hyper-chaotic Duffing system based on new nonlinear predictive control. Int. J. Dyn. Control. 2020, 8, 917–931. [Google Scholar] [CrossRef]
- Gupta, S.; Varshney, P.; Srivastava, S. Whale optimization based synchronization and control of two identical fractional order financial chaotic systems. J. Intell. Fuzzy Syst. 2021, 1–14. [Google Scholar] [CrossRef]
- Xiong, P.Y.; Jahanshahi, H.; Alcaraz, R.; Chu, Y.M.; Gómez-Aguilar, J.F.; Alsaadi, F.E. Spectral Entropy Analysis and Synchronization of a Multi-Stable Fractional-Order Chaotic System using a Novel Neural Network-Based Chattering-Free Sliding Mode Technique. Chaos Solitons Fractals 2021, 144, 110576. [Google Scholar] [CrossRef]
- Lin, C.H.; Hu, G.H.; Chan, C.Y.; Yan, J.J. Chaos-Based Synchronized Dynamic Keys and Their Application to Image Encryption with an Improved AES Algorithm. Appl. Sci. 2021, 11, 1329. [Google Scholar] [CrossRef]
- Moon, S.; Baik, J.J.; Seo, J.M. Chaos synchronization in generalized Lorenz systems and an application to image encryption. Commun. Nonlinear Sci. Numer. Simul. 2021, 96, 105708. [Google Scholar] [CrossRef]
- Wan, P.Y.; Liao, T.L.; Yan, J.J.; Tsai, H.H. Discrete sliding mode control for chaos synchronization and its application to an improved El-Gamal cryptosystem. Symmetry 2019, 11, 843. [Google Scholar] [CrossRef] [Green Version]
- Yau, H.T.; Hung, T.H.; Hsieh, C.C. Bluetooth based chaos synchronization using particle swarm optimization and its applications to image encryption. Sensors 2012, 12, 7468–7484. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, X.; Park, J.H.; Cao, J.; Qiu, J. Sliding mode synchronization of multiple chaotic systems with uncertainties and disturbances. Appl. Math. Comput. 2017, 308, 161–173. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C.; Huang, Z.Z.; Grebogi, C. Secure communication based on hyperchaotic Chen system with time-delay. Int. J. Bifurc. Chaos 2017, 27, 1750076. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.C.; Huang, F.Y.; Du, Z.; Lin, Y.C. Synchronization of fuzzy modeling chaotic time delay memristor-based Chua’s circuits with application to secure communication. Int. J. Fuzzy Syst. 2015, 17, 206–214. [Google Scholar] [CrossRef]
- Kwon, O.M.; Park, J.H.; Lee, S.M. Secure communication based on chaotic synchronization via interval time-varying delay feedback control. Nonlinear Dyn. 2011, 63, 239–252. [Google Scholar] [CrossRef]
- Shoeibi, A.; Ghassemi, N.; Alizadehsani, R.; Rouhani, M.; Hosseini-Nejad, H.; Khosravi, A.; Panahiazar, M.; Nahavandi, S. A comprehensive comparison of handcrafted features and convolutional autoencoders for epileptic seizures detection in EEG signals. Expert Syst. Appl. 2021, 163, 113788. [Google Scholar] [CrossRef]
- Ghassemi, N.; Shoeibi, A.; Rouhani, M.; Hosseini-Nejad, H. Epileptic seizures detection in EEG signals using TQWT and ensemble learning. In Proceedings of the 2019 9th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 24–25 October 2019; pp. 403–408. [Google Scholar]
- Ahmadi, A.; Kashefi, M.; Shahrokhi, H.; Nazari, M.A. Computer aided diagnosis system using deep convolutional neural networks for ADHD subtypes. Biomed. Signal. Process. Control. 2021, 63, 102227. [Google Scholar] [CrossRef]
- Chen, H.; Song, Y.; Li, X. A deep learning framework for identifying children with ADHD using an EEG-based brain network. Neurocomputing 2019, 356, 83–96. [Google Scholar] [CrossRef]
- Sadeghi, D.; Shoeibi, A.; Ghassemi, N.; Moridian, P.; Khadem, A.; Alizadehsani, R.; Teshnehlab, M.; Gorriz, J.M.; Nahavandi, S. An Overview on Artificial Intelligence Techniques for Diagnosis of Schizophrenia Based on Magnetic Resonance Imaging Modalities: Methods, Challenges, and Future Works. arXiv 2021, arXiv:2103.03081. [Google Scholar]
- Górriz, J.M.; Ramírez, J.; Ortíz, A.; Martínez-Murcia, F.J.; Segovia, F.; Suckling, J.; Leming, M.; Zhang, Y.-D.; Álvarez-Sánchez, J.R.; Bologna, G.; et al. Artificial intelligence within the interplay between natural and artificial computation: Advances in data science, trends and applications. Neurocomputing 2020, 410, 237–270. [Google Scholar] [CrossRef]
- Shoeibi, A.; Khodatars, M.; Jafari, M.; Moridian, P.; Rezaei, M.; Alizadehsani, R.; Khozeimeh, F.; Gorriz, J.M.; Heras, J.; Panahiazar, M.; et al. Applications of Deep Learning Techniques for Automated Multiple Sclerosis Detection Using Magnetic Resonance Imaging: A Review. arXiv 2021, arXiv:2105.04881. [Google Scholar]
- Ghassemi, N.; Shoeibi, A.; Rouhani, M. Deep neural network with generative adversarial networks pre-training for brain tumor classification based on MR images. Biomed. Signal. Process. Control. 2020, 57, 101678. [Google Scholar] [CrossRef]
- Manni, F.; van der Sommen, F.; Fabelo, H.; Zinger, S.; Shan, C.; Edström, E.; Elmi-Terander, A.; Ortega, S.; Callicó, G.M.; de With, P.H.N. Hyperspectral imaging for glioblastoma surgery: Improving tumor identification using a deep spectral-spatial approach. Sensors 2020, 20, 6955. [Google Scholar] [CrossRef]
- Ahsan, M.; Based, M.; Haider, J.; Kowalski, M. COVID-19 Detection from Chest X-ray Images Using Feature Fusion and Deep Learning. Sensors 2021, 21, 1480. [Google Scholar]
- Mohammadpoor, M.; Shoeibi, A.; Shojaee, H. A hierarchical classification method for breast tumor detection. Iran. J. Med. Phys. 2016, 13, 261–268. [Google Scholar]
- Mambou, S.J.; Maresova, P.; Krejcar, O.; Selamat, A.; Kuca, K. Breast cancer detection using infrared thermal imaging and a deep learning model. Sensors 2018, 18, 2799. [Google Scholar] [CrossRef] [Green Version]
- Shoeibi, A.; Khodatars, M.; Alizadehsani, R.; Ghassemi, N.; Jafari, M.; Moridian, P.; Khadem, A.; Sadeghi, D.; Hussain, S.; Zare, A.; et al. Automated detection and forecasting of covid-19 using deep learning techniques: A review. arXiv 2020, arXiv:2007.10785. [Google Scholar]
- Alizadehsani, R.; Sharifrazi, D.; Izadi, N.H.; Joloudari, J.H.; Shoeibi, A.; Gorriz, J.M.; Hussain, S.; Arco, J.E.; Sani, Z.A.; Khozeimeh, F.; et al. Uncertainty-aware semi-supervised method using large unlabelled and limited labeled COVID-19 data. arXiv 2021, arXiv:2102.06388. [Google Scholar]
- Ayoobi, N.; Sharifrazi, D.; Alizadehsani, R.; Shoeibi, A.; Gorriz, J.M.; Moosaei, H.; Khosravi, A.; Nahavandi, S.; Chofreh, A.G.; Goni, F.A.; et al. Time Series Forecasting of New Cases and New Deaths Rate for COVID-19 using Deep Learning Methods. arXiv 2021, arXiv:2104.15007. [Google Scholar]
- Ghassemi, N.; Shoeibi, A.; Khodatars, M.; Heras, J.; Rahimi, A.; Zare, A.; Pachori, R.B.; Gorriz, J.M. Automatic Diagnosis of COVID-19 from CT Images using CycleGAN and Transfer Learning. arXiv 2021, arXiv:2104.11949. [Google Scholar]
- Khozeimeh, F.; Sharifrazi, D.; Izadi, N.H.; Joloudari, J.H.; Shoeibi, A.; Alizadehsani, R.; Gorriz, J.M.; Hussain, S.; Sani, Z.A.; Moosaei, H.; et al. CNN AE: Convolution Neural Network combined with Autoencoder approach to detect survival chance of COVID 19 patients. arXiv 2021, arXiv:2104.08954. [Google Scholar]
- Alizadehsani, R.; Khosravi, A.; Roshanzamir, M.; Abdar, M.; Sarrafzadegan, N.; Shafie, D.; Khozeimeh, F.; Shoeibi, A.; Nahavandi, S.; Panahiazar, M.; et al. Coronary Artery Disease Detection Using Artificial Intelligence Techniques: A Survey of Trends, Geographical Differences and Diagnostic Features 1991–2020. Comput. Biol. Med. 2020, 128, 104095. [Google Scholar] [CrossRef] [PubMed]
- Fereydouneyan, F.; Zare, A.; Mehrshad, N. Using a fuzzy controller optimized by a genetic algorithm to regulate blood glucose level in type 1 diabetes. J. Med. Eng. Technol. 2011, 35, 224–230. [Google Scholar] [CrossRef] [PubMed]
- Namadchian, Z.; Zare, A. Stability analysis of dynamic nonlinear interval type-2 TSK fuzzy control systems based on describing function. Soft Comput. 2020, 24, 14623–14636. [Google Scholar] [CrossRef]
- Baydokhty, M.E.; Zare, A.; Balochian, S. Performance of optimal hierarchical type 2 fuzzy controller for load–frequency system with production rate limitation and governor dead band. Alex. Eng. J. 2016, 55, 379–397. [Google Scholar] [CrossRef] [Green Version]
- Bajestani, N.S.; Kamyad, A.V.; Zare, A. A piecewise type-2 fuzzy regression model. Int. J. Comput. Intell. Syst. 2017, 10, 734–744. [Google Scholar] [CrossRef] [Green Version]
- Zare, A.; Okauti, M. Automatic road extraction based on neuro-fuzzy algorithm. In Proceedings of the 10th WSEAS International Conference on Robotics, Control and Manufacturing Technology, Hangzhou, China, 11–13 April 2010. [Google Scholar]
- Bajestani, N.S.; Kamyad, A.V.; Esfahani, E.N.; Zare, A. Nephropathy forecasting in diabetic patients using a GA-based type-2 fuzzy regression model. Biocybern. Biomed. Eng. 2017, 37, 281–289. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Histogram | Correlation | Differential Attack | PSNR | Information Entropy | ||
|---|---|---|---|---|---|---|---|
| Standard | Encrypted | NPCR (%) | UACI (%) | ||||
| Image 1 | 1,555,164 | 3,375,508 | 0.9970 | 99.611 | 33.461 | 34.623 | 5.5081 |
| Image 2 | 1,942,777 | 5,880,577 | 0.9964 | 99.610 | 33.460 | 33.186 | 5.2665 |
| Image 3 | 2,926,366 | 6,511,850 | 0.9976 | 99.609 | 33.463 | 34.982 | 4.8647 |
| Image 4 | 1,969,829 | 5,299,018 | 0.9954 | 99.611 | 33.459 | 33.182 | 5.077 |
| Image 5 | 2,776,087 | 5,805,249 | 0.9967 | 99.610 | 33.460 | 34.945 | 4.6828 |
| Image 6 | 1,983,221 | 5,394,168 | 0.9956 | 99.610 | 33.462 | 33.198 | 5.0558 |
| Image 7 | 3,108,704 | 6,811,427 | 0.9974 | 99.611 | 33.460 | 35.053 | 4.5683 |
| Image 8 | 2,783,671 | 8,248,927 | 0.9958 | 99.610 | 33.460 | 33.483 | 4.5248 |
| Image 9 | 2,887,118 | 6,433,437 | 0.9976 | 99.612 | 33.461 | 34.979 | 4.7115 |
| Image 10 | 1,168,385 | 3,379,135 | 0.9956 | 99.610 | 33.463 | 32.850 | 5.6934 |
| Images | Histogram | Correlation | Differential Attack | PSNR | Information Entropy | ||
|---|---|---|---|---|---|---|---|
| Standard | Encrypted | NPCR (%) | UACI (%) | ||||
| Image 1 | 371,790.95 | 414,854.68 | 0.9965 | 99.611 | 33.459 | 34.146 | 6.4966 |
| Image 2 | 637,672.20 | 775,806.22 | 0.9958 | 99.609 | 33.461 | 32.599 | 5.9531 |
| Image 3 | 704,174.55 | 770,799.32 | 0.9969 | 99.610 | 33.462 | 34.284 | 5.8406 |
| Image 4 | 655,672.19 | 823,316.52 | 0.9941 | 99.612 | 33.459 | 32.583 | 5.7021 |
| Image 5 | 711,500.39 | 800,070.88 | 0.9959 | 99.608 | 33.460 | 34.286 | 5.5608 |
| Image 6 | 658,916.62 | 837,271.82 | 0.9944 | 99.611 | 33.461 | 32.603 | 5.6814 |
| Image 7 | 764,189.21 | 849,713.85 | 0.9966 | 99.612 | 33.463 | 34.304 | 5.5387 |
| Image 8 | 910,672.69 | 1,120,143.86 | 0.9942 | 99.611 | 33.462 | 32.728 | 5.3159 |
| Image 9 | 712,326.25 | 774,208.57 | 0.9969 | 99.613 | 33.458 | 34.276 | 5.6761 |
| Image 10 | 377,977.28 | 471,233.22 | 0.9948 | 99.611 | 33.461 | 32.426 | 6.4675 |
| Images | Histogram | Correlation | Differential Attack | PSNR | Information Entropy | ||
|---|---|---|---|---|---|---|---|
| Standard | Encrypted | NPCR (%) | UACI (%) | ||||
| Image 1 | 239,642.29 | 273,559.38 | 0.9963 | 99.611 | 33.461 | 34.052 | 6.6729 |
| Image 2 | 399,917.39 | 493,824.29 | 0.9954 | 99.609 | 33.462 | 32.376 | 6.2428 |
| Image 3 | 439,060.82 | 492,967.11 | 0.9967 | 99.613 | 33.458 | 34.141 | 6.1468 |
| Image 4 | 453,864.31 | 566,619.14 | 0.9937 | 99.610 | 33.460 | 32.416 | 5.9343 |
| Image 5 | 490,271.52 | 542,562.67 | 0.9956 | 99.611 | 33.461 | 34.115 | 5.8208 |
| Image 6 | 450,636.56 | 557,774.79 | 0.9939 | 99.612 | 33.459 | 32.399 | 5.9312 |
| Image 7 | 505,486.28 | 558,333.49 | 0.9963 | 99.613 | 33.463 | 34.156 | 5.8280 |
| Image 8 | 585,431.25 | 723,173.69 | 0.9936 | 99.609 | 33.462 | 32.481 | 5.6384 |
| Image 9 | 456,812.35 | 501,600.98 | 0.9966 | 99.611 | 33.462 | 34.120 | 5.9823 |
| Image 10 | 244,061.98 | 307,606.74 | 0.9944 | 99.612 | 33.460 | 32.263 | 6.6424 |
| Images | Histogram | Correlation | Differential Attack | PSNR | Information Entropy | ||
|---|---|---|---|---|---|---|---|
| Standard | Encrypted | NPCR (%) | UACI (%) | ||||
| Image 1 | 183,606.33 | 207,963.36 | 0.9961 | 99.611 | 33.461 | 33.975 | 6.7881 |
| Image 2 | 287,175.67 | 347,957.53 | 0.9951 | 99.610 | 33.459 | 32.271 | 6.4632 |
| Image 3 | 318,969.51 | 351,484.97 | 0.9965 | 99.608 | 33.458 | 34.027 | 6.3680 |
| Image 4 | 353,759.37 | 420,480.95 | 0.9934 | 99.611 | 33.462 | 32.302 | 6.1234 |
| Image 5 | 379,975.17 | 413,399.53 | 0.9954 | 99.609 | 33.457 | 34.054 | 6.0266 |
| Image 6 | 347,921.57 | 414,116.53 | 0.9936 | 99.611 | 33.456 | 32.304 | 6.1326 |
| Image 7 | 381,476.11 | 422,535.34 | 0.9962 | 99.612 | 33.461 | 34.097 | 6.0471 |
| Image 8 | 435,904.80 | 517,108.82 | 0.9932 | 99.610 | 33.460 | 32.354 | 5.8833 |
| Image 9 | 333,557.81 | 368,586.44 | 0.9965 | 99.611 | 33.459 | 34.073 | 6.2279 |
| Image 10 | 185,554.28 | 227,767.28 | 0.9942 | 99.607 | 33.454 | 32.185 | 6.7663 |
| Images | Histogram | Correlation | Differential Attack | PSNR | Information Entropy | ||
|---|---|---|---|---|---|---|---|
| Standard | Encrypted | NPCR (%) | UACI (%) | ||||
| Image 1 | 160,406.07 | 181,599.02 | 0.9961 | 99.609 | 33.459 | 33.965 | 6.8530 |
| Image 2 | 234,952.50 | 276,693.14 | 0.9950 | 99.611 | 33.461 | 32.237 | 6.6058 |
| Image 3 | 262,347.29 | 294,388.46 | 0.9964 | 99.608 | 33.458 | 34.007 | 6.5026 |
| Image 4 | 300,806.96 | 345,570.37 | 0.9931 | 99.610 | 33.457 | 32.204 | 6.2599 |
| Image 5 | 319,370.10 | 347,968.94 | 0.9953 | 99.612 | 33.462 | 34.046 | 6.1673 |
| Image 6 | 295,654.72 | 341,419.34 | 0.9934 | 99.607 | 33.457 | 32.213 | 6.2688 |
| Image 7 | 320,298.48 | 349,954.05 | 0.9960 | 99.611 | 33.459 | 33.995 | 6.1951 |
| Image 8 | 364,283.38 | 423,633.80 | 0.9930 | 99.609 | 33.462 | 32.290 | 6.0396 |
| Image 9 | 276400.42 | 307161.05 | 0.9964 | 99.610 | 33.460 | 34.000 | 6.3806 |
| Image 10 | 162565.94 | 191476.22 | 0.9940 | 99.612 | 33.461 | 32.139 | 6.8390 |
| Properties Encryption Method | Encryption Method | Data Types | Works | ||
|---|---|---|---|---|---|
| Disturbance | Unknown Parameter | Uncertainty | |||
| ✕ | ✕ | ✕ | Chaos Logic Map | EEG Signals | [17] |
| ✕ | ✕ | ✕ | Double Chaotic Layer Encryption (DCLE) | EEG, ECG Signals | [18] |
| ✕ | ✕ | ✕ | Optical Chaos (Additive Chaos Masking) | EEG Signals | [19] |
| ✕ | ✕ | ✕ | Chaotic Modulation on the Intrinsic Mode Functions | EEG, ECG Signals | [20] |
| ✕ | ✕ | ✕ | Dynamic S-Boxes and Chaotic Maps | Medical Images | [21] |
| ✕ | ✕ | ✕ | Improvement Chaotic System | Medical Images | [22] |
| ✕ | ✕ | ✕ | chaotic Map + Fractional Discrete Cosine Transform (FrDCT) Coefficients | Medical Images | [23] |
| ✕ | ✕ | ✕ | Fourth Order Chaotic System | Medical Images | [24] |
| ✕ | ✕ | ✕ | Non Linear 4D Logistic Map and DNA Sequences (NL4DLM_DNA) | Medical Images | [25] |
| ✕ | ✕ | ✕ | Chaotic Method Based on Arnold’s Cat Map | MRI Images | [26] |
| ✕ | ✕ | ✕ | Latin Square + Memristive Chaotic System | Medical Images | [27] |
| ✕ | ✕ | ✕ | 3D Chaotic Cat Map + NCA | Medical Images | [28] |
| ✕ | ✕ | ✕ | Multiple Chaotic Systems + MD5 | Medical Images | [29] |
| ✕ | ✕ | ✕ | Double-Humped Logistic Map | MRI, X-ray Images | [30] |
| ✕ | ✕ | ✕ | Chaotic Map-based Remote Authentication Scheme | Medical Informatics | [31] |
| ✕ | ✕ | ✕ | Fused Coupled Chaotic Map (FCCM) | ECG Signals | [32] |
| ✕ | ✕ | ✕ | Rossler Dynamical Chaotic system + Sine Map | Medical Images | [33] |
| ✕ | ✕ | ✕ | DWT, DCT, SVD + Chaotic System | MRI Images | [34] |
| ✕ | ✕ | ✕ | Data Encryption Standard (DES), and Elliptic Curves Cryptography (ECC) | EEG Signals | [35] |
| Chen Hyper-Chaotic System + Adaptive-Robust Multi-Mode Synchronization | Medical Images (CT, X-ray), Standard Benchmarks | Proposed Method | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javan, A.A.K.; Jafari, M.; Shoeibi, A.; Zare, A.; Khodatars, M.; Ghassemi, N.; Alizadehsani, R.; Gorriz, J.M. Medical Images Encryption Based on Adaptive-Robust Multi-Mode Synchronization of Chen Hyper-Chaotic Systems. Sensors 2021, 21, 3925. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113925
Javan AAK, Jafari M, Shoeibi A, Zare A, Khodatars M, Ghassemi N, Alizadehsani R, Gorriz JM. Medical Images Encryption Based on Adaptive-Robust Multi-Mode Synchronization of Chen Hyper-Chaotic Systems. Sensors. 2021; 21(11):3925. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113925
Chicago/Turabian StyleJavan, Ali Akbar Kekha, Mahboobeh Jafari, Afshin Shoeibi, Assef Zare, Marjane Khodatars, Navid Ghassemi, Roohallah Alizadehsani, and Juan Manuel Gorriz. 2021. "Medical Images Encryption Based on Adaptive-Robust Multi-Mode Synchronization of Chen Hyper-Chaotic Systems" Sensors 21, no. 11: 3925. https://0-doi-org.brum.beds.ac.uk/10.3390/s21113925