
A Four-Channel Low-Noise Readout IC for Air Flow Measurement Using Hot Wire Anemometer in 0.18 μm CMOS Technology

 , ,
, ,
Abstract
:1. Introduction
2. Proposed Micro Anemometer Air Flow Sensor and Low-Noise Readout IC
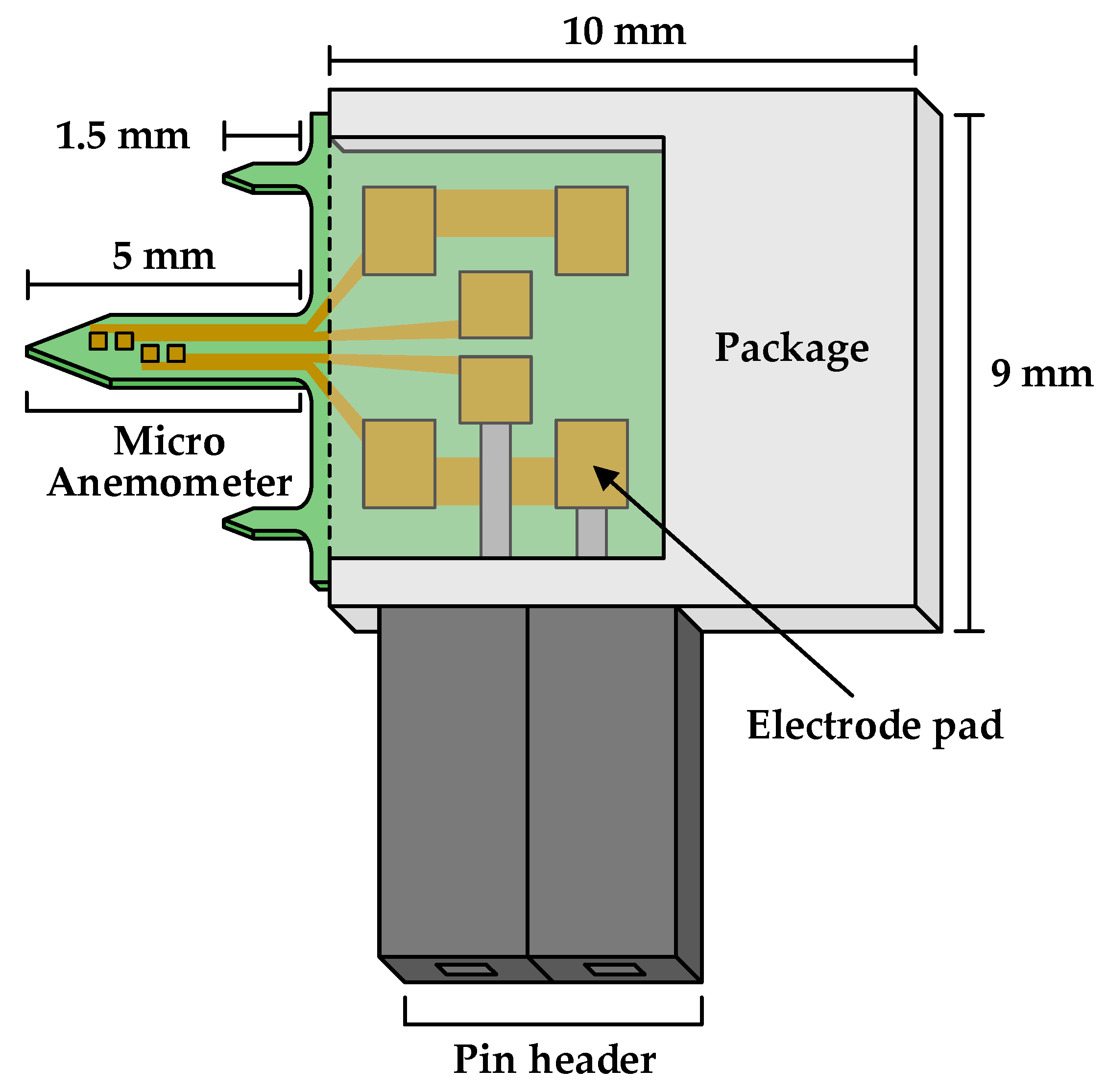
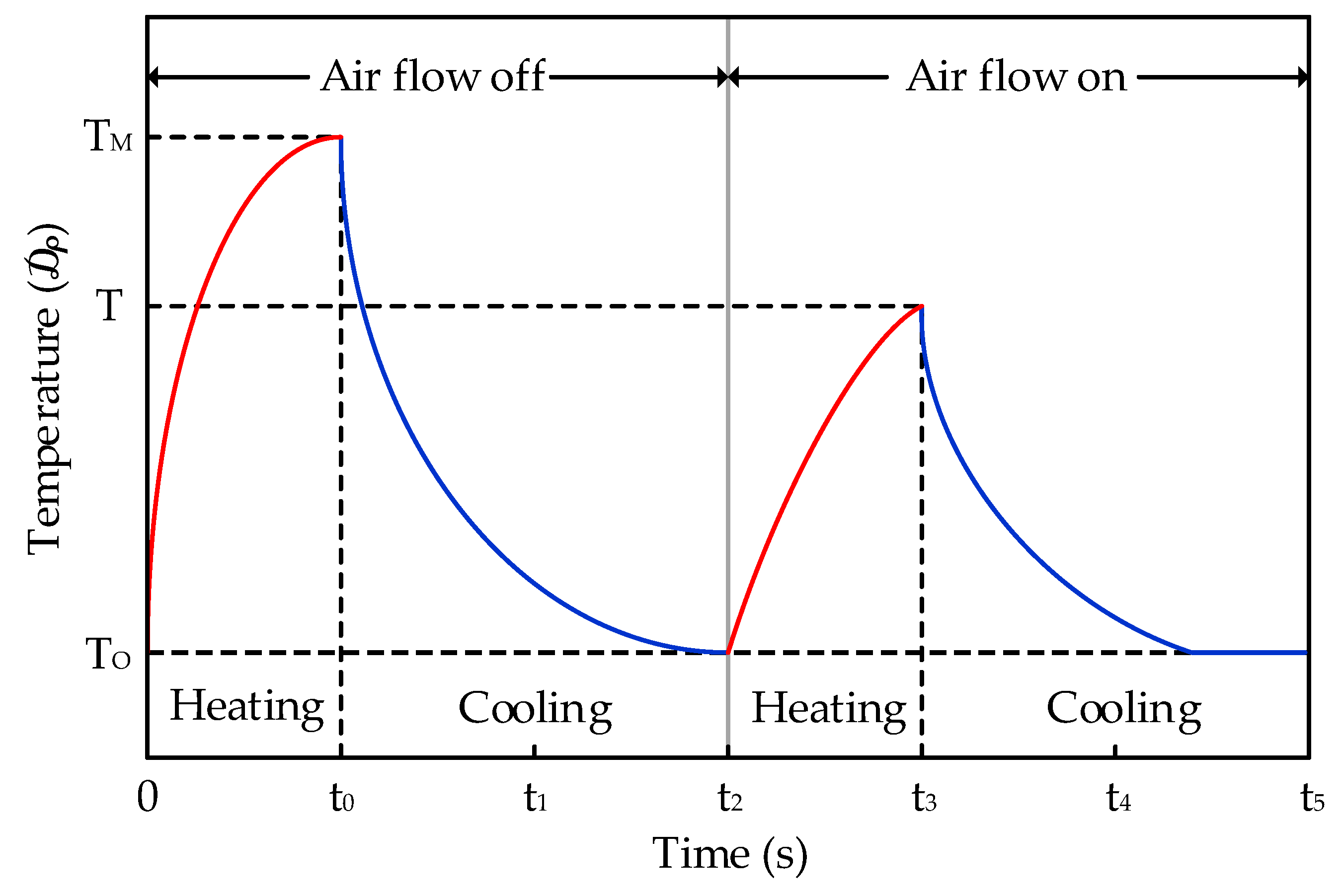
2.1. Micro Anemometer Air Flow Sensor
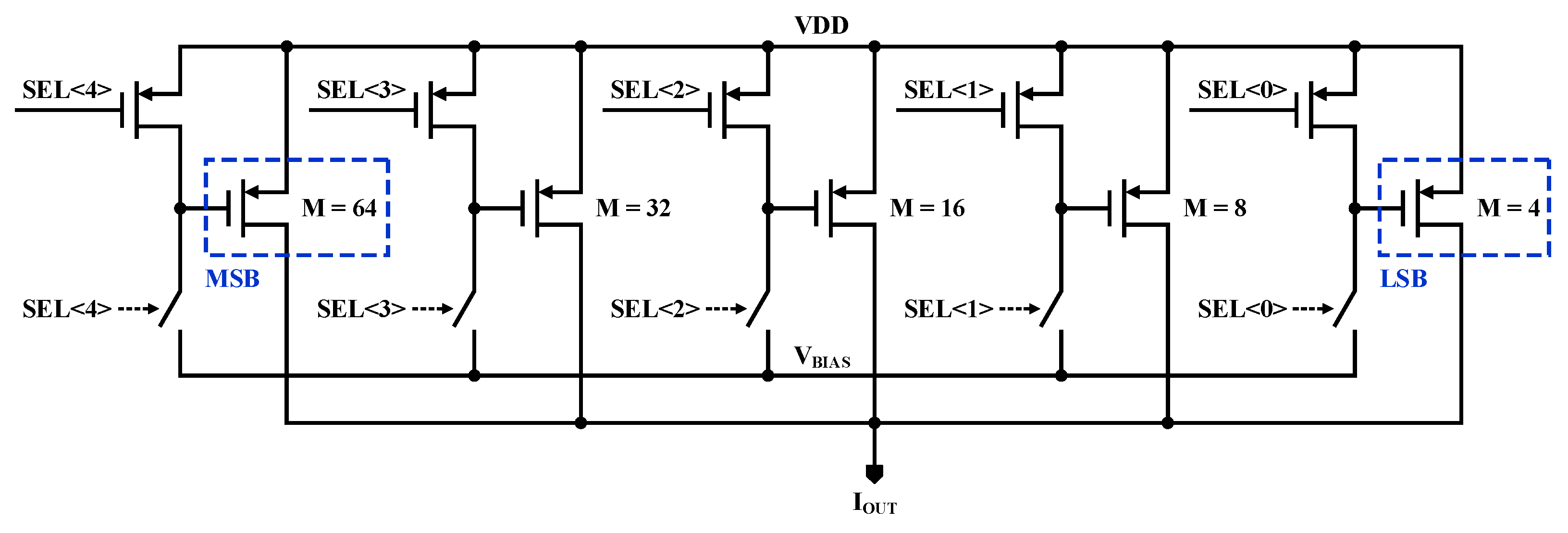
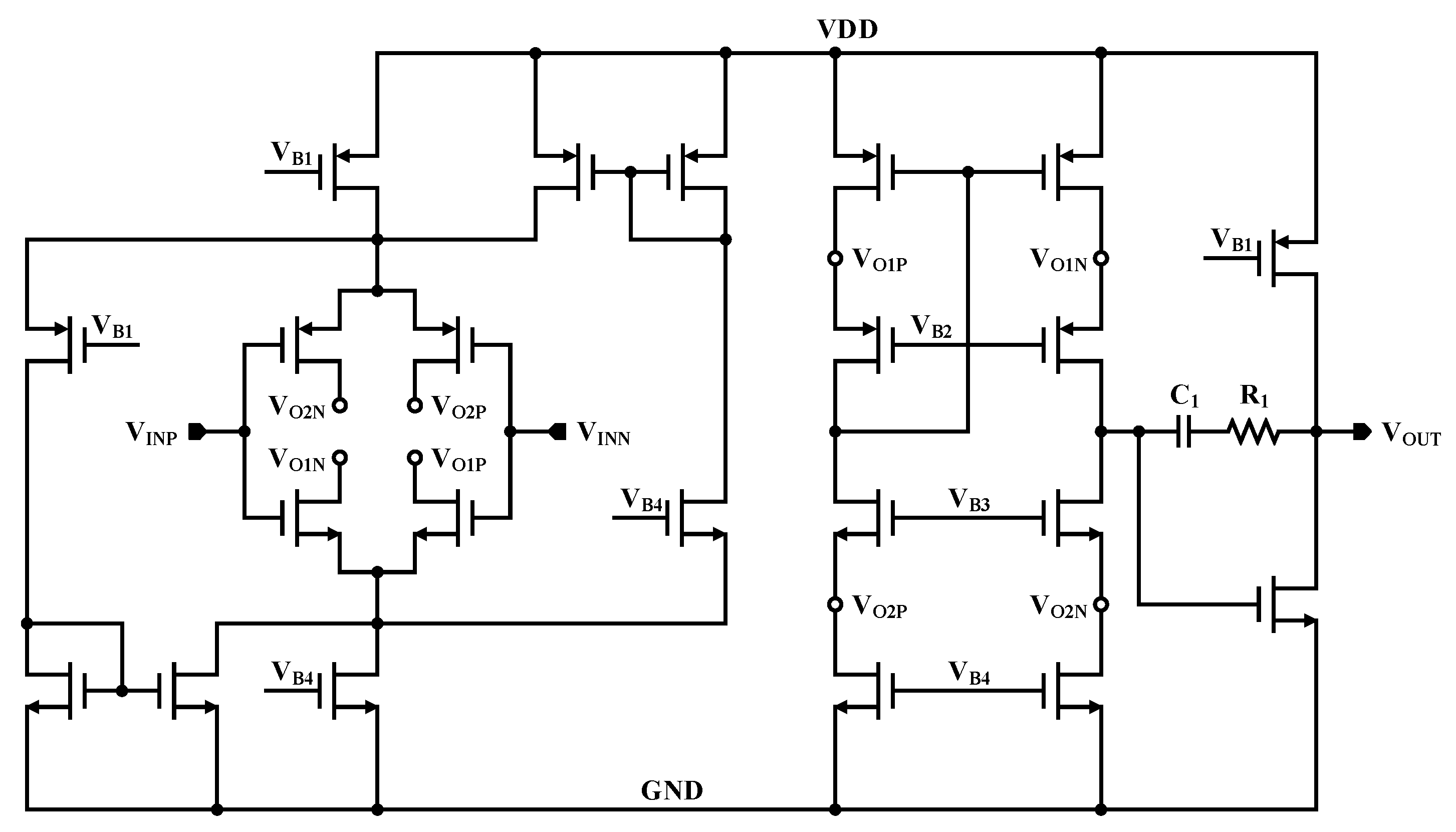
2.2. Four-Channel Low-Noise Readout IC
3. Experimental Methods and Results
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chiang, C.T. Design of a CMOS MEMS accelerometer used in IoT devices for seismic detection. IEEE J. Emerg. Sel. Top. Circuits Syst. 2018, 8, 566–577. [Google Scholar] [CrossRef]
- Qu, H.; Fang, D.; Xie, H. A single-crystal silicon 3-axis CMOS-MEMS accelerometer. IEEE Sens. J. 2004, 2, 661–664. [Google Scholar]
- Hosseini, N.; Nievergelt, A.P.; Adams, J.D.; Stavrov, V.T.; Fantner, G.E. A monolithic MEMS position sensor for closed-loop high-speed atomic force microscopy. Nanotechnology 2016, 27, 135705. [Google Scholar] [CrossRef] [PubMed]
- Scott, S.; Sadeghi, F.; Peroulis, D. An inherently-robust 300 °C MEMS temperature sensors for wireless health monitoring of ball and rolling element bearings. IEEE Sens. J. 2009, 975–978. [Google Scholar] [CrossRef]
- Ando, B.; Bahlio, S.; Pitrone, N. “Bent beam” MEMS Temperature Sensors for Contactless Measurements in Harsh Environments. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference, Vancouver Island, BC, Canada, 12–15 May 2008. [Google Scholar]
- Jha, C.M.; Bahl, G.; Melamud, R.; Chandorkar, S.A.; Hopcroft, M.A.; Kim, B.; Aharwal, M.; Salvia, J.; Mehta, H.; Kenny, T.W. CMOS-Compatible dual-resonator MEMS temperature sensor with milli-degree accuracy. In Proceedings of the International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007. [Google Scholar]
- Lazarus, N.; Bedair, S.S.; Lo, C.-C.; Fedder, G.K. CMOS-MEMS capacitive humidity sensor. J. Microelectromech. Syst. 2010, 19, 183–191. [Google Scholar] [CrossRef]
- Chen, L.-T.; Lee, C.-Y.; Cheng, W.-H. MEMS-based humidity sensor temperature compensation mechanism. Sens. Actuators A Phys. 2008, 147, 522–528. [Google Scholar] [CrossRef]
- Gavin, J.; Tien, L.; David, B.; Mandyam, V. Vision and air flow combine to streamline flying honeybees. Sci. Rep. 2013, 3, 2614. [Google Scholar]
- Koji, T.; Seiichi, S.; Junju, T. Morphology of insect wings and airflow produced by flapping insects. J. Intell. Mater. Syst. Struct. 2006, 17, 743–751. [Google Scholar]
- Hamamoto, M.; Ohta, Y.; Hara, K.; Hisada, T. Free-flight Analysis of Flapping Flight during Turning by Fluid-structure Interaction Finite Element Analysis based on Arbitrary Lagrangian-Eulerian Method. In Proceedings of the IEEE International Conference on Robotics & Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Sanjay, P. Induced airflow in flying insects I. A theoretical model of the induced flow. J. Exp. Biol. 2006, 209, 32–42. [Google Scholar]
- Wang, Y.-H.; Lee, C.-Y.; Chiang, C.-M. MEMS-based air flow sensor with a free-standing micro-cantilever structure. Sensors 2007, 7, 2389–2401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Federspiel, C.C.; Chen, J. Air-powered sensor. In Proceedings of the 2003 IEEE Sensors, Toronto, ON, Canada, 22–24 October 2003. [Google Scholar]
- Sardini, E.; Serpelloni, M. Self-powered wireless sensor for air temperature and velocity measurements with energy harvesting capability. IEEE Trans. Instrum. Meas. 2011, 60, 1838–1844. [Google Scholar] [CrossRef]
- Sivakami, V.; Vasuki, B. Modified design and analysis of constant voltage hot wire anemometer. In Proceedings of the International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kerala, India, 5–6 July 2019. [Google Scholar]
- Ferreira, R.P.C.; Freire, R.C.S.; Deep, C.S.; de Roca Neto, J.S.; Oliveira, A. Hot-wire anemometer with temperature compensation using only one sensor. IEEE Trans. Instrum. Meas. 2001, 50, 954–958. [Google Scholar] [CrossRef]
- Ebefors, T.; Kalvesten, E.; Stemme, G. Three dimensional silicon triple-hot-wire anemometer based on polyimide joint. In Proceedings of the IEEE Eleventh Annual International Workshop on Micro Electro Mechanical Systems, an Investigation of Micro Structures, Sensors, Actuators, Machines and Systems, Heidelberg, Germany, 25–29 January 1998; pp. 93–98. [Google Scholar]
- Bruun, H.H.; Khan, M.A.; Al-Kayiem, H.H.; Fardad, A.A. Velocity calibration relationships for hot-wire anemometry. J. Phys. E Sci. Instrum. 1988, 21, 225–232. [Google Scholar] [CrossRef]
- Koay, K.C.; Chan, P.K. A low energy-noise 65 nm CMOS switched capacitor resistive-bridge sensor interface. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 799–810. [Google Scholar] [CrossRef]
- Stefanescu, D.M. Resistive Force Tranducers. In Handbook of Force Transducers, 1st ed.; Springer Science & Business Media: Berlin, Germany, 2011; pp. 49–72. [Google Scholar]
- Fraden, J. Phyical Principles of Sensing. In Handbook of Modern Sensors, 3rd ed.; Springer Science & Business Media: Berlin, Germany, 2004; pp. 37–121. [Google Scholar]
- Fan, Q.; Sebastiano, F.; Huijsing, J.H.; Makinwa, K.A.A. A 1.8 uW 60 nV/rtHz capacitively-coupled chopper instrumentation amplifier in 65 nm CMOS for wireless sensor nodes. IEEE J. Solid-State Circuits 2011, 46, 1534–1543. [Google Scholar] [CrossRef]
- PGA308 Single-Supply, Auto-Zero Sensor Amplifier with Programmable Gain and Offset; Texas Instrument: Dallas, TX, USA, 2008.
- AD8231 Zero Drift, Digitally Programmable Instrumentation Amplifier; Analog Devices: Norwood, MA, USA, 2007.
- Ong, G.T.; Chan, P.K. A power-aware chopper-stabilized instrumentation amplifier for resistive wheatstone bridge sensors. IEEE Trans. Instrum. Meas. 2014, 63, 2253–2263. [Google Scholar] [CrossRef]
- Chae, Y.; Huijsing, J.H.; Makinwa, K.A.A. A 20-b 40-mV range read-out IC with 50-nV offset and 0.04% gain error for bridge tranducer. IEEE J. Solid-State Circuit 2012, 47, 2152–2163. [Google Scholar]
- Yen, C.-J.; Chung, W.-Y.; Chi, M.C. Micro-power low-offset instrumentation amplifier IC design for biomedical system applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2004, 51, 691–699. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| This Work | TCAS-I 2017 [20] | TIM 2014 [26] | JSSC 2012 [27] | TCAS-I 2004 [28] | |
|---|---|---|---|---|---|
| Process(μm) | 0.18 | 0.065 | 0.18 | 0.7 | 0.5 |
| Techniques for IA | Chopping | Correlated double sampling | Chopping | Chopping | Conventional |
| Output format | Digital codes | Voltage | Voltage | Digital codes | Voltage |
| Supply voltage (V) | 3.3 | 1 | 2.7 | 5 | 2.5 |
| Supply current (μA) | 1886 (Full-chip including heater) 387 (IA) | 12.3 | 27.65 | 270 | 61 |
| Gain (dB) | 4–48 | 100 | 40 | 40 | 20 |
| Input range | 0–2 V | ±9.38 mV | ±8.8 mV | ±40 mV | - |
| Input referred noise (nV/√Hz) | 95.4 (@ 1 Hz) 10.6 (@ 100 Hz) | 347.85 | 84.08 | 16.2 | 175 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, K.; Kim, H.; Kwon, Y.; Choi, G.; Kim, T.; Kim, C.; Cho, D.; Lee, J.; Ko, H. A Four-Channel Low-Noise Readout IC for Air Flow Measurement Using Hot Wire Anemometer in 0.18 μm CMOS Technology. Sensors 2021, 21, 4694. https://0-doi-org.brum.beds.ac.uk/10.3390/s21144694
Nam K, Kim H, Kwon Y, Choi G, Kim T, Kim C, Cho D, Lee J, Ko H. A Four-Channel Low-Noise Readout IC for Air Flow Measurement Using Hot Wire Anemometer in 0.18 μm CMOS Technology. Sensors. 2021; 21(14):4694. https://0-doi-org.brum.beds.ac.uk/10.3390/s21144694
Chicago/Turabian StyleNam, Kyeongsik, Hyungseup Kim, Yongsu Kwon, Gyuri Choi, Taeyup Kim, Chulhong Kim, Dongil Cho, Junghoon Lee, and Hyoungho Ko. 2021. "A Four-Channel Low-Noise Readout IC for Air Flow Measurement Using Hot Wire Anemometer in 0.18 μm CMOS Technology" Sensors 21, no. 14: 4694. https://0-doi-org.brum.beds.ac.uk/10.3390/s21144694