
Sensorless Speed Estimation for the Diagnosis of Induction Motors via MCSA. Review and Commercial Devices Analysis †


Abstract
:1. Introduction
- -
- FMB methods require to estimate or to know in advance a wide range of parameters (stator resistance, inductance, rotor time constant, number of slots, etc.). As many of them are time-varying (e.g., stator resistance can have variations in a range of 1:2 [60]), there are two possible scenarios: if they are assumed to be constant, an error is added to the speed estimation; on the other hand, if they are estimated over time, the algorithm can get more complicated and unstable.
- -
- -
- SaEHB techniques do not depend on any time-varying parameter either. Yet, when based on Rotor Slot Harmonics, they depend on a machine characteristic that is rarely known by the motor owner: the number of rotor slots. Conversely, if they are based on Mixed Eccentricity Harmonics, which only depend on an easy to know parameter (number of poles), precision and detectability problems may arise due to their narrow bandwidth [72].
2. Importance of SSE in Diagnosis
- -
- Real-time condition monitoring: motors must be continuously diagnosed to achieve perfect operation.
- -
- Noninvasive methods: production must not be altered (just when maintenance is needed).
- -
- High reliability: avoid actions based on a false diagnosis.
- -
- Automated process without human intervention: efficient and fast diagnosis of big amounts of motors.
- -
- Intelligent operation of the facility: take the proper actions based on a correct diagnosis.
- -
- Interoperability via the Internet of Things: information related to the state of the machines must be shared with the rest of the systems and take decisions collectively.
3. Methods Based on the Fundamental Model
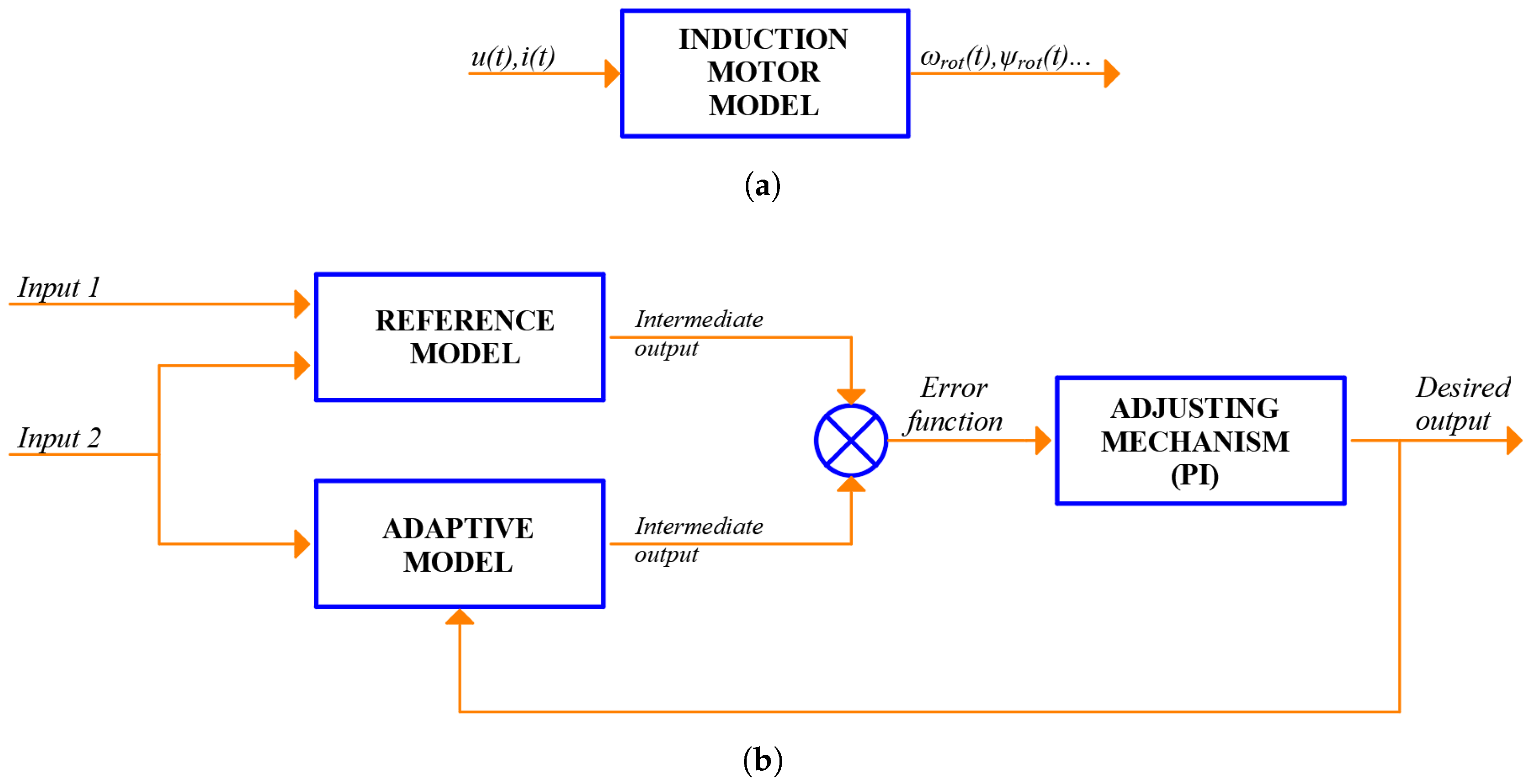
3.1. Model Reference Adaptive Systems
3.2. Extended Kalman Filter Observer
3.3. Artificial Intelligence
3.4. Methods Based on the Fundamental Model in Online Diagnosis
4. Methods Based on Magnetic Anisotropy
4.1. Methods Based on Signal Injection
4.2. Methods Based on Slotting and Eccentricity Harmonics
4.3. Methods Based on Magnetic Anisotropy in Online Diagnosis
- -
- Accurate: when based on RSH, errors can be less than 0.1 rpm.
- -
- Robust: they do not depend on any time-varying parameter.
- -
- Easy to implement: no need to subject the motor to a signal other than the one provided by its normal power supply.
- -
- Compatible with MCSA: similar signal processing techniques and speed range.
5. Commercial Devices
5.1. EXPLORER 4000
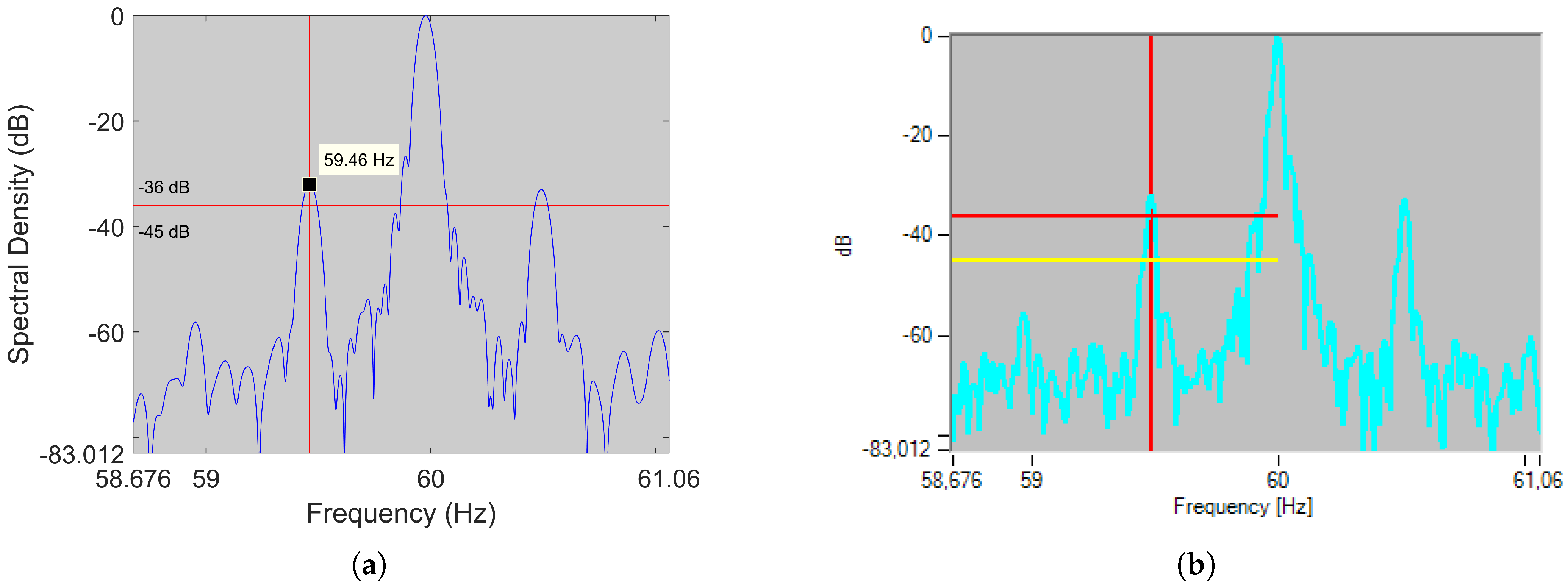
5.1.1. Mixed Eccentricity Harmonics: Detectability Problems in Two-Pole Machines
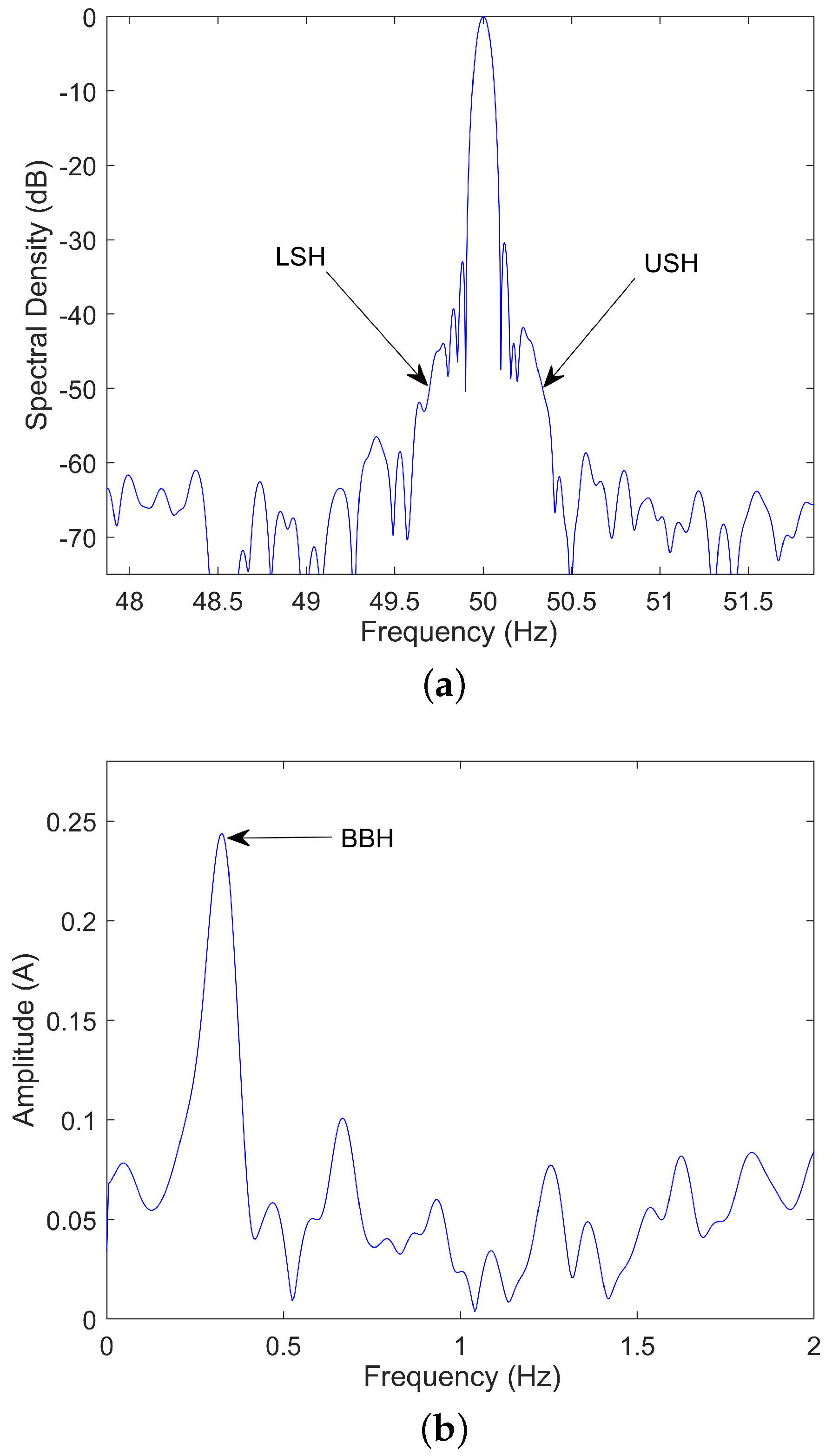
5.1.2. Mixed Eccentricity Harmonics: Narrow Bandwidth Implications in Rotor Diagnosis
- 1.
- Harmonic misidentification: the harmonic is confused with another close to it.
- 2.
- Harmonic in movement during capture time: the harmonic energy spreads over a range of frequencies instead of being concentrated in a single peak.
- 3.
- Frequency resolution error: the real harmonic frequency is between two FFT consecutive bins.
5.2. MCEMAX
5.2.1. Implications of Nameplate-Based Approximations
5.2.2. Broken Bars Harmonic: Detectability Problems
5.2.3. Mixed Eccentricity Harmonic: Detectability and Accuracy Problems
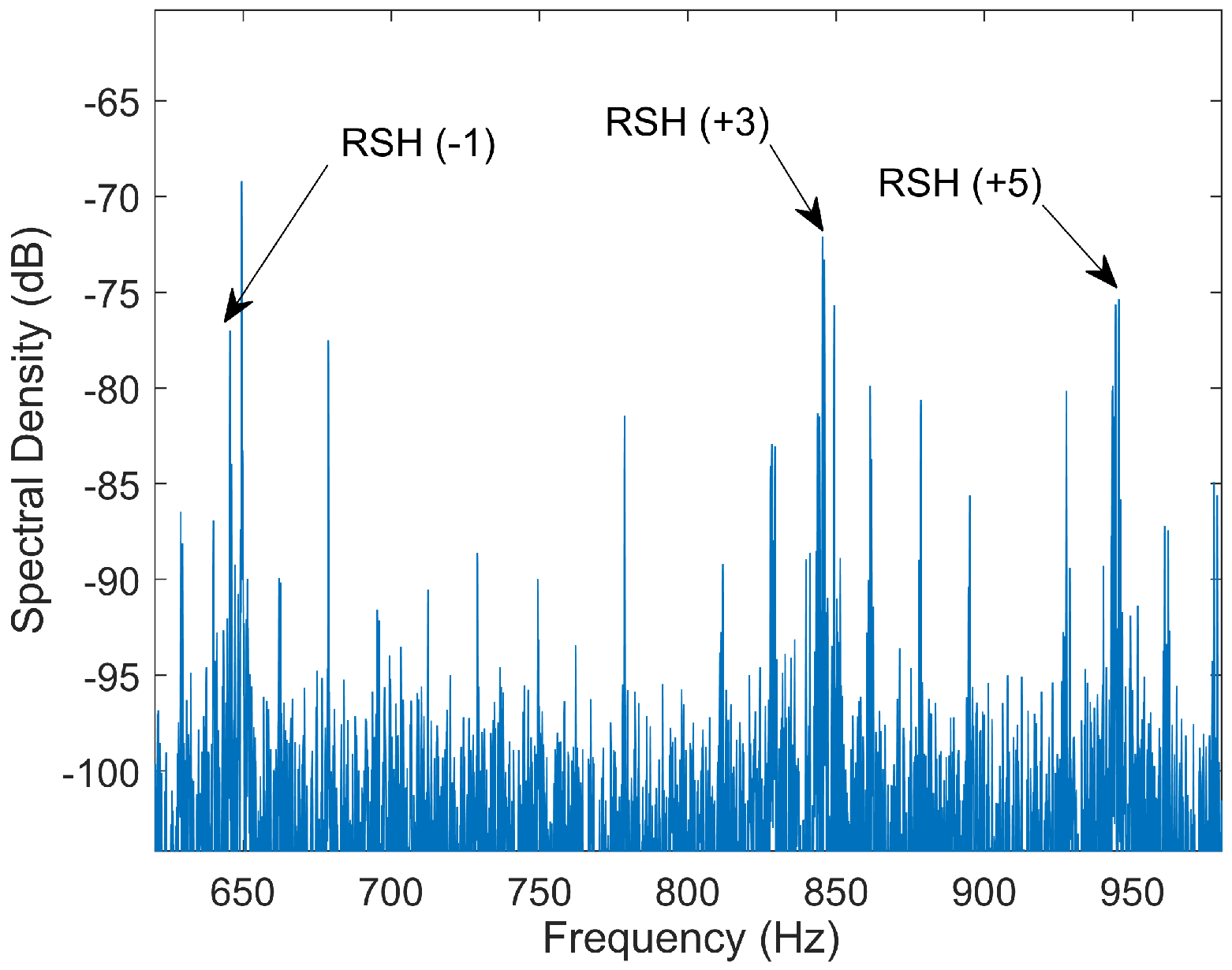
5.2.4. Diagnosing with Static Eccentricity Harmonics
5.3. Discussion and Lines of Improvement
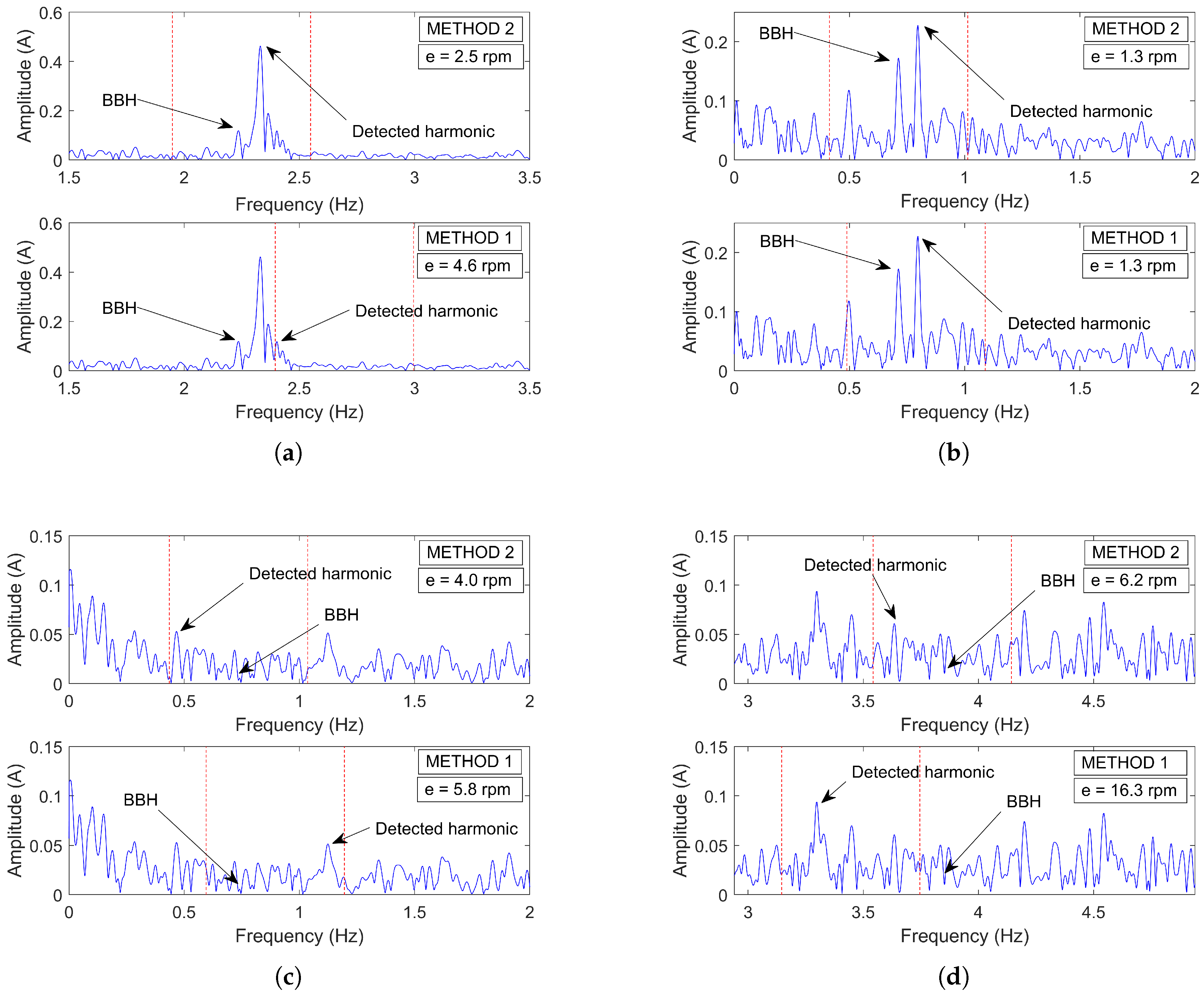
- 1-
- RSH-based algorithm using a search band covering from to .
- 2-
- RSH-based algorithm equal to 1 but displacing the band 0.5 Hz so as not to cover the harmonic at ().
- 3-
- RSH-based algorithm using a search band centered in a preliminary frequency estimation using nameplate data. The band amplitude is proportional to that of the MCEMAX for the MEH ( Hz).
- 4-
- The replicated MCEMAX algorithm. A speed match is considered if the difference between BBH and MEH speeds are less than 0.5 rpm.
- 5-
- LMEH-based algorithm using a search band covering from to . Speed is obtained as the weighted average of the ones extracted from the spectrum of the line current and the absolute value of the current vector (similar to EXP4000).
6. Conclusions
- -
- FMB methods are apparently not the most suitable for portable devices, since they are invasive due to the need of voltage sensing and a first stage of parameter identification. However, they can be a good option for a continuous monitoring system, since, if implemented in the driver, the set formed by the MCSA diagnostic procedure and FMB method could use the same voltages and current measurements than the control system, as well as take advantage of the natural stops for the parameter identification. Nevertheless, further research is still necessary in order to study whether the accuracy provided by a method like this is enough for its use in high-reliability diagnostic procedures via MCSA.
- -
- SIB methods introduce excessive complexity either for a portable device or for a continuous monitoring system. The complexity is only compensated by their performance at low or zero speed, which is not the range where MCSA is used. Thus, it can be discarded as a promising candidate for SSE in online diagnosis via MCSA.
- -
- SaEHB are the best option for continuous or occasional monitoring due to its compatibility with MCSA in terms of accuracy, robustness, ease of implementation and independence to parameter variations. Among them, MEH-based methods are preferred in industry since they only depend on the number of pole pairs, which is a parameter available on the nameplate. As a counterpart, they provide low accuracy due to the narrow bandwidth of these harmonics. Conversely, RSH-based methods are preferred in academy since they provide higher accuracy, being the drawback in this case its reduced applicability due to the need of knowing the number of rotor slots, which is a parameter rarely known by motor owners.
- -
- Current SaEHB techniques used in commercial devices do not provide reliability in a considerable amount of cases. On the one hand, EXP4000 has the main problem of using MEH, which do not provide enough accuracy due to its narrow bandwidth and the difficulty of being detected, particularly in two-pole machines. On the other hand, MCEMAX uses the BBH and MEH of the demodulated current. In this case, the major drawback is that to locate these harmonics, it uses an algorithm that depends on a preliminary speed estimation whose accuracy is subjected to the magnitude of the no-load current and the consistency between nameplate data and actual values. Nevertheless, detection difficulties also arise in these two harmonics, and besides, their different speed estimation errors may generate inconsistencies, leading the device to ask for a human check.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations and Formula Nomenclature
| SSE | Sensorless Speed Estimation |
| MCSA | Motor Current Signature Analysis |
| IM | Induction Motor/s |
| FFT | Fast Fourier Transform |
| FMB | Fundamental Model-Based |
| MRAS | Model Reference Adaptive System/s |
| EKF | Extended Kalman Filter |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network/s |
| FL | Fuzzy Logic |
| GA | Genetic Algorithm/s |
| MAB | Magnetic Anisotropy-Based |
| SIB | Signal Injection-Based |
| SaEHB | Slotting and Eccentricity Harmonics-Based |
| USH | Upper Sideband Harmonic |
| LSH | Lower Sideband Harmonic |
| RSH | Rotor Slot Harmonic/s |
| SEH | Static Eccentricity Harmonic/s |
| DEH | Dynamic Eccentricity Harmonic/s |
| MEH | Mixed Eccentricity Harmonic/s |
| LMEH | Lower Mixed Eccentricity Harmonic |
| UMEH | Upper Mixed Eccentricity Harmonic |
| BBH | Broken Bars Harmonic |
| SIH | Speed Independent Harmonic |
| DT | Demodulation Test |
| RET | Rotor Evaluation Test |
| ET | Eccentricity Test |
| n | Speed |
| Synchronous speed | |
| Nominal speed | |
| Mixed Eccentricity Harmonic/s frequency in the spectrum of the stator current | |
| Lower Mixed Eccentricity Harmonic frequency in the spectrum of quantities other than stator current (EXP4000) | |
| Mixed Eccentricity Harmonic frequency in the spectrum of the demodulated stator current (MCEMAX) | |
| Broken Bar Harmonics frequency in the spectrum of the stator current | |
| Broken Bar Harmonic frequency in the spectrum of the demodulated stator current (MCEMAX) | |
| Lower Sideband Harmonic frequency in the spectrum of the stator current | |
| Rotor Slot Harmonic/s frequency in the spectrum of the stator current | |
| Frequency resolution | |
| Nominal current | |
| No-load current | |
| Operating current | |
| Experimental factor to correct slip estimation in MCEMAX alike algorithm | |
| Generic harmonic frequency | |
| Fundamental component frequency | |
| p | Number of pole pairs |
| s | Slip |
| R | Number of rotor bars |
| k | Positive integer number |
| Positive integer number | |
| Order of the stator time harmonic present in the power supply |
Appendix A. Industrial Motors Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2-Poles | 4-Poles | 6-Poles | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.50 | 0.047 | 32.27% | 0.75 | 0.070 | 3.23% | 132.00 | 0.011 | 52.45% | Figure 10 | ||
| 30.00 | 0.017 | 71.34% | 0.75 | 0.070 | 9.39% | 132.00 | 0.011 | 49.51% | |||
| 30.00 | 0.017 | 69.81% | 0.80 | 0.040 | 74.05% | 132.00 | 0.011 | 52.95% | |||
| 30.00 | 0.033 | 141.56% | 0.80 | 0.040 | 96.82% | 200.00 | 0.010 | 47.23% | |||
| 45.00 | 0.010 | 43.23% | Figure 3 and Figure 7b | 1.10 | 0.057 | 100.44% | 250.00 | 0.030 | 16.41% | ||
| 55.00 | 0.013 | 62.78% | 1.10 | 0.057 | 10.21% | 250.00 | 0.010 | 39.05% | |||
| 63.00 | 0.033 | 50.22% | 2.20 | 0.053 | 79.05% | 253.00 | 0.010 | 65.79% | |||
| 90.00 | 0.010 | 33.63% | Figure 1 and Figure 8 | 2.98 | 0.070 | 24.83% | 253.00 | 0.010 | 93.75% | ||
| 90.00 | 0.033 | 66.56% | 37.00 | 0.020 | 53.90% | Figure 7a | 253.00 | 0.010 | 65.96% | ||
| 110.00 | 0.007 | 56.17% | 37.00 | 0.020 | 44.62% | 253.00 | 0.010 | 59.46% | |||
| 112.00 | 0.033 | 75.18% | 45.00 | 0.014 | 36.01% | 375.00 | 0.014 | 65.72% | |||
| 112.00 | 0.033 | 69.43% | 55.00 | 0.012 | 61.22% | Figure 9c | 375.00 | 0.014 | 37.98% | ||
| 112.00 | 0.033 | 88.00% | 75.00 | 0.010 | 62.68% | 375.00 | 0.014 | 33.60% | |||
| 112.00 | 0.033 | 98.72% | 90.00 | 0.013 | 24.93% | 800.00 | 0.017 | 48.82% | Figure 6 | ||
| 112.00 | 0.033 | 81.50% | 90.00 | 0.015 | 60.51% | Figure 9b | |||||
| 117.00 | 0.033 | 69.97% | 110.00 | 0.013 | 30.25% | ||||||
| 132.00 | 0.007 | 76.98% | 110.00 | 0.008 | 73.78% | ||||||
| 132.00 | 0.007 | 99.54% | 110.00 | 0.008 | 83.85% | ||||||
| 134.00 | 0.033 | 62.57% | 110.00 | 0.008 | 72.16% | ||||||
| 134.00 | 0.033 | 81.81% | 110.00 | 0.008 | 100.47% | ||||||
| 139.00 | 0.040 | 96.08% | Figure 9d | 160.00 | 0.013 | 36.90% | |||||
| 150.00 | 0.033 | 79.94% | 160.00 | 0.007 | 84.36% | ||||||
| 171.00 | 0.017 | 90.23% | 160.00 | 0.007 | 91.88% | ||||||
| 223.00 | 0.033 | 74.69% | 160.00 | 0.007 | 61.25% | ||||||
| 230.00 | 0.040 | 86.26% | 160.00 | 0.007 | 68.10% | ||||||
| 231.00 | 0.033 | 68.59% | 160.00 | 0.007 | 39.65% | ||||||
| 232.00 | 0.033 | 74.96% | 300.00 | 0.010 | 58.53% | ||||||
| 234.00 | 0.033 | 88.36% | 580.00 | 0.008 | 71.90% | ||||||
| 239.00 | 0.028 | 81.77% | 1500.00 | 0.007 | 58.57% | Figure 5 | |||||
| 248.00 | 0.033 | 67.73% | Figure 9a | ||||||||
| 248.00 | 0.033 | 61.55% | |||||||||
| 248.00 | 0.033 | 65.63% | |||||||||
| 270.00 | 0.033 | 96.27% | |||||||||
| 270.00 | 0.033 | 61.85% | |||||||||
| 372.00 | 0.033 | 44.23% | |||||||||
| 2200.00 | 0.012 | 36.01% | |||||||||
Appendix B. DAQ System
- High-resolution oscilloscopes:
- –
- PicoScope 4262:
- *
- Channels: 2.
- *
- Vertical resolution: 16-bit.
- *
- Sampling frequency: 10 MS/s.
- –
- PicoScope 4824:
- *
- Channels: 8.
- *
- Vertical resolution: 12-bit.
- *
- Sampling frequency: 80 MS/s.
- High-precision current probes:
- –
- TA189:
- *
- Measuring range: 30 A.
- *
- Accuracy: 1% of reading ±2 mA.
- *
- Frequency range: DC to 100 kHz.
- –
- TA167:
- *
- Measuring range: 200/2000 A.
- *
- Accuracy (0–200/1500 A): 1% of reading ±100/± 500 mA.
- *
- Accuracy (1500–2000 A): ±5 % of reading.
- *
- Frequency range: DC to 20 kHz.
References
- Korzonek, M.; Tarchala, G.; Orlowska-Kowalska, T. A review on MRAS-type speed estimators for reliable and efficient induction motor drives. ISA Trans. 2019, 93, 1–13. [Google Scholar] [CrossRef]
- El Hachemi Benbouzid, M. A review of induction motors signature analysis as a medium for faults detection. IEEE Trans. Ind. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef] [Green Version]
- Benbouzid, M.; Kliman, G. What stator current processing-based technique to use for induction motor rotor faults diagnosis? IEEE Trans. Energy Convers. 2003, 18, 238–244. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Lee, J.; Kwon, B. Online Diagnosis of Induction Motors Using MCSA. IEEE Trans. Ind. Electron. 2006, 53, 1842–1852. [Google Scholar] [CrossRef]
- Merizalde, Y.; Hernández-Callejo, L.; Duque-Perez, O. State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors. Energies 2017, 10, 1056. [Google Scholar] [CrossRef] [Green Version]
- Fernandez-Cavero, V.; Pons-Llinares, J.; Duque-Perez, O.; Morinigo-Sotelo, D. Detection and quantification of bar breakage harmonics evolutions in inverter-fed motors through the dragon transform. ISA Trans. 2020, 109. [Google Scholar] [CrossRef]
- Lee, S.B.; Hyun, D.; Kang, T.; Yang, C.; Shin, S.; Kim, H.; Park, S.; Kong, T.; Kim, H. Identification of false rotor fault indications produced by on-line MCSA for medium voltage induction machines. IEEE Trans. Ind. Appl. 2015, 52, 729–739. [Google Scholar] [CrossRef]
- Gangsar, P.; Tiwari, R. Signal based condition monitoring techniques for fault detection and diagnosis of induction motors: A state-of-the-art review. Mech. Syst. Signal Process. 2020, 144. [Google Scholar] [CrossRef]
- Kim, S.-K.; Park, T.S.; Yoo, J.-Y.; Park, G.-T. Speed-sensorless vector control of an induction motor using neural network speed estimation. IEEE Trans. Ind. Electron. 2001, 48, 609–614. [Google Scholar] [CrossRef]
- Maiti, S.; Verma, V.; Chakraborty, C.; Hori, Y. An Adaptive Speed Sensorless Induction Motor Drive With Artificial Neural Network for Stability Enhancement. IEEE Trans. Ind. Inform. 2012, 8, 757–766. [Google Scholar] [CrossRef]
- Gutierrez-Villalobos, J.M.; Rodriguez-Resendiz, J.; Rivas-Araiza, E.A.; Martínez-Hernández, M.A. Sensorless FOC Performance Improved with On-Line Speed and Rotor Resistance Estimator Based on an Artificial Neural Network for an Induction Motor Drive. Sensors 2015, 15, 15311–15325. [Google Scholar] [CrossRef] [Green Version]
- Reddy, S.V.B.S.; Kumar, B.; Swaroop, D. Investigations on Training Algorithms for Neural Networks Based Flux Estimator Used in Speed Estimation of Induction Motor. In Proceedings of the 2019 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 7–8 March 2019; pp. 1090–1094. [Google Scholar] [CrossRef]
- Luo, Y.; Lin, C. Fuzzy MRAS based speed estimation for sensorless stator field oriented controlled induction motor drive. In Proceedings of the 2010 International Symposium on Computer, Communication, Control and Automation (3CA), Tainan, Taiwan, 5–7 May 2010; Volume 2, pp. 152–155. [Google Scholar] [CrossRef]
- Wang, S.Y.; Tseng, C.L.; Lin, S.C.; Chiu, C.J.; Chou, J.H. An Adaptive Supervisory Sliding Fuzzy Cerebellar Model Articulation Controller for Sensorless Vector-Controlled Induction Motor Drive Systems. Sensors 2015, 15, 7323–7348. [Google Scholar] [CrossRef] [Green Version]
- Mohan Krishna, S.; Febin Daya, J. MRAS speed estimator with fuzzy and PI stator resistance adaptation for sensorless induction motor drives using RT-lab. Perspect. Sci. 2016, 8, 121–126. [Google Scholar] [CrossRef] [Green Version]
- Cai, L.; Zhang, Y.; Zhang, Z.; Liu, C.; Lu, Z. Application of genetic algorithms in EKF for speed estimation of an induction motor. In Proceedings of the IEEE 34th Annual Conference on Power Electronics Specialist, 2003 (PESC’03), Acapulco, Mexico, 15–19 June 2003; Volume 1, pp. 345–349. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Idris, N.R.N.; Jannati, M.; Anbaran, S.A.; Alamri, Y.A. Using NSGA II multiobjective genetic algorithm for EKF-based estimation of speed and electrical torque in AC induction machines. In Proceedings of the 2014 IEEE 8th International Power Engineering and Optimization Conference (PEOCO2014), Langkawi, Malaysia, 24–25 March 2014; pp. 396–401. [Google Scholar] [CrossRef]
- Thomson, W.T.; Fenger, M. Current signature analysis to detect induction motor faults. IEEE Ind. Appl. Mag. 2001, 7, 26–34. [Google Scholar] [CrossRef]
- Drif, M.; Cardoso, A.J.M. The Use of the Instantaneous-Reactive-Power Signature Analysis for Rotor-Cage-Fault Diagnostics in Three-Phase Induction Motors. IEEE Trans. Ind. Electron. 2009, 56, 4606–4614. [Google Scholar] [CrossRef]
- Kim, J.; Shin, S.; Lee, S.B.; Gyftakis, K.N.; Drif, M.; Cardoso, A.J.M. Power Spectrum-Based Detection of Induction Motor Rotor Faults for Immunity to False Alarms. IEEE Trans. Energy Convers. 2015, 30, 1123–1132. [Google Scholar] [CrossRef]
- Yahia, K.; Sahraoui, M.; Cardoso, A.J.M.; Ghoggal, A. The Use of a Modified Prony’s Method to Detect the Airgap-Eccentricity Occurrence in Induction Motors. IEEE Trans. Ind. Appl. 2016, 52, 3869–3877. [Google Scholar] [CrossRef]
- Schoen, R.; Lin, B.; Habetler, T.; Schlag, J.; Farag, S. An unsupervised, on-line system for induction motor fault detection using stator current monitoring. IEEE Trans. Ind. Appl. 1995, 31, 1280–1286. [Google Scholar] [CrossRef]
- Cusidó, J.; Romeral, L.; Ortega, J.A.; Garcia, A.; Riba, J. Signal Injection as a Fault Detection Technique. Sensors 2011, 11, 3356–3380. [Google Scholar] [CrossRef] [Green Version]
- Kuo, C.C.; Liu, C.H.; Chang, H.C.; Lin, K.J. Implementation of a Motor Diagnosis System for Rotor Failure Using Genetic Algorithm and Fuzzy Classification. Appl. Sci. 2017, 7, 31. [Google Scholar] [CrossRef] [Green Version]
- Duque-Perez, O.; Del Pozo-Gallego, C.; Morinigo-Sotelo, D.; Fontes Godoy, W. Condition Monitoring of Bearing Faults Using the Stator Current and Shrinkage Methods. Energies 2019, 12, 3392. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Yang, Y.; Chen, J.; Qiu, R.; Liu, Z. Characteristics Analysis and Measurement of Inverter-Fed Induction Motors for Stator and Rotor Fault Detection. Energies 2020, 13, 101. [Google Scholar] [CrossRef] [Green Version]
- Elvira-Ortiz, D.A.; Morinigo-Sotelo, D.; Zorita-Lamadrid, A.L.; Osornio-Rios, R.A.; Romero-Troncoso, R.D.J. Fundamental Frequency Suppression for the Detection of Broken Bar in Induction Motors at Low Slip and Frequency. Appl. Sci. 2020, 10, 4160. [Google Scholar] [CrossRef]
- Fontes Godoy, W.; Morinigo-Sotelo, D.; Duque-Perez, O.; Nunes da Silva, I.; Goedtel, A.; Palácios, R.H.C. Estimation of Bearing Fault Severity in Line-Connected and Inverter-Fed Three-Phase Induction Motors. Energies 2020, 13, 3481. [Google Scholar] [CrossRef]
- Duda, A.; Drozdowski, P. Induction Motor Fault Diagnosis Based on Zero-Sequence Current Analysis. Energies 2020, 13, 6528. [Google Scholar] [CrossRef]
- Petryna, J.; Duda, A.; Sułowicz, M. Eccentricity in Induction Machines—A Useful Tool for Assessing Its Level. Energies 2021, 14, 1976. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G. Diagnosis of Broken-Bar Fault in Induction Machines Using Discrete Wavelet Transform Without Slip Estimation. IEEE Trans. Ind. Appl. 2009, 45, 1395–1404. [Google Scholar] [CrossRef]
- Zolfaghari, S.; Noor, S.B.M.; Rezazadeh Mehrjou, M.; Marhaban, M.H.; Mariun, N. Broken Rotor Bar Fault Detection and Classification Using Wavelet Packet Signature Analysis Based on Fourier Transform and Multi-Layer Perceptron Neural Network. Appl. Sci. 2018, 8, 25. [Google Scholar] [CrossRef] [Green Version]
- Nishat Toma, R.; Kim, J.M. Bearing Fault Classification of Induction Motors Using Discrete Wavelet Transform and Ensemble Machine Learning Algorithms. Appl. Sci. 2020, 10, 5251. [Google Scholar] [CrossRef]
- Qiu, C.; Wu, X.; Xu, C.; Qiu, X.; Xue, Z. An Approximate Estimation Approach of Fault Size for Spalled Ball Bearing in Induction Motor by Tracking Multiple Vibration Frequencies in Current. Sensors 2020, 20, 1631. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Hu, N.; Zhang, L.; Chen, L.; Wang, B.; Zhou, Y. A Method for Broken Rotor Bars Diagnosis Based on Sum-Of-Squares of Current Signals. Appl. Sci. 2020, 10, 5980. [Google Scholar] [CrossRef]
- Zidat, F.; Lecointe, J.P.; Morganti, F.; Brudny, J.F.; Jacq, T.; Streiff, F. Non Invasive Sensors for Monitoring the Efficiency of AC Electrical Rotating Machines. Sensors 2010, 10, 7874–7895. [Google Scholar] [CrossRef] [Green Version]
- Tamai, S.; Sugimoto, H.; Yano, P. Speed sensorless vector control of induction motor applied model reference adaptive system. In Proceedings of the 1985 Conference Record IEEE/MS Annual Meeting, Baltimore, MD, USA, 29 September–3 October 1985; pp. 613–620. [Google Scholar]
- Schauder, C. Adaptive speed identification for vector control of induction motors without rotational transducers. IEEE Trans. Ind. Appl. 1992, 28, 1054–1061. [Google Scholar] [CrossRef]
- Peng, F.Z.; Fukao, T. Robust speed identification for speed-sensorless vector control of induction motors. IEEE Trans. Ind. Appl. 1994, 30, 1234–1240. [Google Scholar] [CrossRef]
- Maiti, S.; Chakraborty, C.; Sengupta, S. Adaptive Estimation of Speed and Rotor Time Constant for the Vector Controlled Induction Motor Drive Using Reactive Power. In Proceedings of the IECON 2007—33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 286–291. [Google Scholar] [CrossRef]
- Dybkowski, M.; Orlowska-Kowalska, T. Application of the stator current-based MRAS speed estimator in the sensorless induction motor drive. In Proceedings of the 2008 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 2306–2311. [Google Scholar] [CrossRef]
- Ravi Teja, A.V.; Chakraborty, C.; Maiti, S.; Hori, Y. A New Model Reference Adaptive Controller for Four Quadrant Vector Controlled Induction Motor Drives. IEEE Trans. Ind. Electron. 2012, 59, 3757–3767. [Google Scholar] [CrossRef]
- Kumar, R.; Das, S.; Syam, P.; Chattopadhyay, A.K. Review on model reference adaptive system for sensorless vector control of induction motor drives. IET Electr. Power Appl. 2015, 9, 496–511. [Google Scholar] [CrossRef]
- Ravi Teja, A.V.; Verma, V.; Chakraborty, C. A New Formulation of Reactive-Power-Based Model Reference Adaptive System for Sensorless Induction Motor Drive. IEEE Trans. Ind. Electron. 2015, 62, 6797–6808. [Google Scholar] [CrossRef]
- Zbede, Y.B.; Gadoue, S.M.; Atkinson, D.J. Model Predictive MRAS Estimator for Sensorless Induction Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 3511–3521. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Kumar, R.; Pal, A. MRAS-Based Speed Estimation of Induction Motor Drive Utilizing Machines’ d- and q-Circuit Impedances. IEEE Trans. Ind. Electron. 2019, 66, 4286–4295. [Google Scholar] [CrossRef]
- Gaeid, K.S.; Ping, H.W.; Khalid, M.; Masaoud, A. Sensor and Sensorless Fault Tolerant Control for Induction Motors Using a Wavelet Index. Sensors 2012, 12, 4031–4050. [Google Scholar] [CrossRef]
- Zaky, M.S.; Khater, M.M.; Shokralla, S.S.; Yasin, H.A. Wide-Speed-Range Estimation With Online Parameter Identification Schemes of Sensorless Induction Motor Drives. IEEE Trans. Ind. Electron. 2009, 56, 1699–1707. [Google Scholar] [CrossRef]
- Jouili, M.; Agrebi, Y.; Koubaa, Y.; Boussak, M. A Luenberger state observer for simultaneous estimation of speed and stator resistance in sensorless IRFOC induction motor drives. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 898–904. [Google Scholar] [CrossRef]
- Kim, Y.R.; Sul, S.K.; Park, M.H. Speed sensorless vector control of induction motor using extended Kalman filter. IEEE Trans. Ind. Appl. 1994, 30, 1225–1233. [Google Scholar] [CrossRef]
- Shi, K.L.; Chan, T.F.; Wong, Y.K.; Ho, S.L. Speed estimation of an induction motor drive using an optimized extended Kalman filter. IEEE Trans. Ind. Electron. 2002, 49, 124–133. [Google Scholar] [CrossRef] [Green Version]
- Barut, M.; Bogosyan, S.; Gokasan, M. Speed sensorless direct torque control of IMs with rotor resistance estimation. Energy Convers. Manag. 2005, 46, 335–349. [Google Scholar] [CrossRef]
- Akin, B.; Orguner, U.; Ersak, A.; Ehsani, M. Simple Derivative-Free Nonlinear State Observer for Sensorless AC Drives. IEEE/ASME Trans. Mechatron. 2006, 11, 634–643. [Google Scholar] [CrossRef]
- Yildiz, R.; Barut, M.; Zerdali, E. A Comprehensive Comparison of Extended and Unscented Kalman Filters for Speed-Sensorless Control Applications of Induction Motors. IEEE Trans. Ind. Inform. 2020, 16, 6423–6432. [Google Scholar] [CrossRef]
- Rokhforoz, P.; Poshtan, J. Rotor speed and resistance estimation using robust extended Kalman filter for sensorless vector control of induction motor drives. In Proceedings of the 6th Power Electronics, Drive Systems Technologies Conference (PEDSTC2015), Tehran, Iran, 3–4 February 2015; pp. 304–309. [Google Scholar] [CrossRef]
- Yin, Z.; Li, G.; Zhang, Y.; Liu, J.; Sun, X.; Zhong, Y. A Speed and Flux Observer of Induction Motor Based on Extended Kalman Filter and Markov Chain. IEEE Trans. Power Electron. 2017, 32, 7096–7117. [Google Scholar] [CrossRef]
- Zerdali, E. Adaptive Extended Kalman Filter for Speed-Sensorless Control of Induction Motors. IEEE Trans. Energy Convers. 2019, 34, 789–800. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Lu, T.; Yuan, L.; Xu, W.; Zhu, J. A comparative study of Luenberger observer, sliding mode observer and extended Kalman filter for sensorless vector control of induction motor drives. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2466–2473. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless position control of induction motors-an emerging technology. IEEE Trans. Ind. Electron. 1998, 45, 840–851. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless control of induction motor drives. Proc. IEEE 2002, 90, 1359–1394. [Google Scholar] [CrossRef] [Green Version]
- Holtz, J. Sensorless Control of Induction Machines—With or Without Signal Injection? IEEE Trans. Ind. Electron. 2006, 53, 7–30. [Google Scholar] [CrossRef] [Green Version]
- Degner, M.W.; Lorenz, R.D. Using multiple saliencies for the estimation of flux, position, and velocity in AC machines. IEEE Trans. Ind. Appl. 1998, 34, 1097–1104. [Google Scholar] [CrossRef] [Green Version]
- Ha, J.I.; Sul, S.K. Sensorless field-orientation control of an induction machine by high-frequency signal injection. IEEE Trans. Ind. Appl. 1999, 35, 45–51. [Google Scholar] [CrossRef]
- Wolbank, T.M.; Vogelsberger, M.A.; Stumberger, R.; Mohagheghi, S.; Habetler, T.G.; Harley, R.G. Autonomous Self-Commissioning Method for Speed-Sensorless-Controlled Induction Machines. IEEE Trans. Ind. Appl. 2010, 46, 946–954. [Google Scholar] [CrossRef]
- Ishida, M.; Iwata, K. A New Slip Frequncy Detector of an Induction Motor Utilizing Rotor Slot Harmonics. IEEE Trans. Ind. Appl. 1984, IA-20, 575–582. [Google Scholar] [CrossRef]
- Williams, B.W.; Goodfellow, J.K.; Green, T.C. ‘Sensorless’ speed measurement of inverter driven squirrel cage induction motors. In Proceedings of the 1990 Fourth International Conference on Power Electronics and Variable-Speed Drives (Conf. Publ. No. 324), London, UK, 17–19 July 1990; pp. 297–300. [Google Scholar]
- Ferrah, A.; Bradley, K.G.; Asher, G.M. Sensorless speed detection of inverter fed induction motors using rotor slot harmonics and fast Fourier transform. In Proceedings of the PESC’92 Record. 23rd Annual IEEE Power Electronics Specialists Conference, Toledo, Spain, 29 June–3 July 1992; Volume 1, pp. 279–286. [Google Scholar] [CrossRef]
- Hurst, K.D.; Habetler, T.G. Sensorless speed measurement using current harmonic spectral estimation in induction machine drives. IEEE Trans. Power Electron. 1996, 11, 66–73. [Google Scholar] [CrossRef]
- Blasco-Gimenez, R.; Asher, G.M.; Sumner, M.; Bradley, K.J. Performance of FFT-rotor slot harmonic speed detector for sensorless induction motor drives. IEE Proc. Electr. Power Appl. 1996, 143, 258–268. [Google Scholar] [CrossRef]
- Ferrah, A.; Bradley, K.J.; Hogben-Laing, P.J.; Woolfson, M.S.; Asher, G.M.; Sumner, M.; Cilia, J.; Shuli, J. A speed identifier for induction motor drives using real-time adaptive digital filtering. IEEE Trans. Ind. Appl. 1998, 34, 156–162. [Google Scholar] [CrossRef]
- Nandi, S.; Ahmed, S.; Toliyat, H.A. Detection of rotor slot and other eccentricity related harmonics in a three phase induction motor with different rotor cages. IEEE Trans. Energy Convers. 2001, 16, 253–260. [Google Scholar] [CrossRef]
- Nandi, S.; Ahmed, S.; Toliyat, H.A.; Bharadwaj, R.M. Selection criteria of induction machines for speed-sensorless drive applications. IEEE Trans. Ind. Appl. 2003, 39, 704–712. [Google Scholar] [CrossRef]
- Keysan, O.; Ertan, H.B. Real-Time Speed and Position Estimation Using Rotor Slot Harmonics. IEEE Trans. Ind. Inform. 2013, 9, 899–908. [Google Scholar] [CrossRef]
- Silva, W.L.; Lima, A.M.N.; Oliveira, A. Speed Estimation of an Induction Motor Operating in the Nonstationary Mode by Using Rotor Slot Harmonics. IEEE Trans. Instrum. Meas. 2015, 64, 984–994. [Google Scholar] [CrossRef]
- Luecke, S.; Koupeny, J.; Mertens, A. Induction machine speed tracking based on rotor slot harmonics using a modified PLL approach. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–8 September 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Samanta, A.K.; Naha, A.; Routray, A.; Deb, A.K. Fast and accurate spectral estimation for online detection of partial broken bar in induction motors. Mech. Syst. Signal Process. 2018, 98, 63–77. [Google Scholar] [CrossRef]
- Yepes, A.G.; Baneira, F.; Malvar, J.; Vidal, A.; Pérez-Estévez, D.; López, O.; Doval-Gandoy, J. Selection Criteria of Multiphase Induction Machines for Speed-Sensorless Drives Based on Rotor Slot Harmonics. IEEE Trans. Ind. Electron. 2016, 63, 4663–4673. [Google Scholar] [CrossRef]
- Yepes, A.G.; Doval-Gandoy, J.; Baneira, F.; Toliyat, H.A. Speed Estimation Based on Rotor Slot Harmonics in Multiphase Induction Machines Under Open-Phase Fault. IEEE Trans. Power Electron. 2018, 33, 7980–7993. [Google Scholar] [CrossRef]
- Bradley, W.J.; Mason, B.; Pezouvanis, A.; Ebrahimi, K.M. A sensorless speed estimation algorithm for use in induction motor fault detection applications. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2014, 228, 257–264. [Google Scholar] [CrossRef]
- Rind, S.; Ren, Y.; Jiang, L. Traction motors and speed estimation techniques for sensorless control of electric vehicles: A review. In Proceedings of the 2014 49th International Universities Power Engineering Conference (UPEC), Cluj-Napoca, Romania, 2–5 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Bonet-Jara, J.; Pons-Llinares, J. Sensorlees Speed Estimation. A Review. In Proceedings of the 2019 IEEE 12th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Toulouse, France, 27–30 August 2019; pp. 283–289. [Google Scholar] [CrossRef]
- Chetwani, S.; Shah, M.; Ramamoorty, M. Online condition monitoring of induction motors through signal processing. In Proceedings of the 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005; Volume 3, pp. 2175–2179. [Google Scholar] [CrossRef]
- Guesmi, H.; Ben Salem, S.; Bacha, K. Smart wireless sensor networks for online faults diagnosis in induction machine. Comput. Electr. Eng. 2015, 41, 226–239. [Google Scholar] [CrossRef]
- Finch, J.W.; Giaouris, D. Controlled AC Electrical Drives. IEEE Trans. Ind. Electron. 2008, 55, 481–491. [Google Scholar] [CrossRef]
- Vas, P. Parameter Estimation, Condition Monitoring, and Diagnosis of Electrical Machines; Oxford Science Publications: Oxford, UK, 1993. [Google Scholar]
- Dorrell, D.G.; Thomson, W.T.; Roach, S. Analysis of airgap flux, current, and vibration signals as a function of the combination of static and dynamic airgap eccentricity in 3-phase induction motors. IEEE Trans. Ind. Appl. 1997, 33, 24–34. [Google Scholar] [CrossRef]
- Megger. Instantaneous Torque as a Predictive Maintenance Tool for Variable Frequency Drives and Line Operated Motors. 2013. Available online: https://es.megger.com/products/motor-and-generator-testing/dynamic-analyzers/baker-exp4000/technical/instantaneous-torque-as-a-predictive-maintenance-t (accessed on 31 May 2021).
- Wiendenbrüg, E. Measurement Analysis and Efficiency Estimation of Three Phase Induction Machines Using Instantaneous Electrical Quantities. Ph.D. Thesis, Oregon State University, Corvallis, OR, USA, 1998. [Google Scholar]
- PDMA. Introduction to MCEMAX. 2019. Available online: https://www.pdma.com/PdMA-intro-mcemax.php (accessed on 31 May 2021).
- UNE: UNE-EN Maquinas Electricas Rotativas 60034-1. 2011. Available online: https://www.une.org/encuentra-tu-norma/busca-tu-norma/norma/?c=N0047178 (accessed on 31 May 2021).
- National Electrical Manufacturers Association. NEMA Motors and Generators, MG-1-2016; National Electrical Manufacturers Association: Rosslyn, VA, USA, 2016. [Google Scholar]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C.; Kliman, G.B. Quantitative evaluation of induction motor broken bars by means of electrical signature analysis. IEEE Trans. Ind. Appl. 2001, 37, 1248–1255. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, X.; Yin, X.; Zhang, Z. Rotor cage fault diagnosis in induction motors based on spectral analysis of current Hilbert modulus. In Proceedings of the IEEE Power Engineering Society General Meeting, Denver, CO, USA, 6–10 June 2004; Volume 2, pp. 1500–1503. [Google Scholar] [CrossRef]










| p = 1, s = 0.01 | p = 1, s = 0.03 | p = 2, s = 0.01 | p = 2, s = 0.03 | p = 3, s = 0.01 | p = 3, s = 0.03 | |
|---|---|---|---|---|---|---|
| Speed error (rpm) | 2.31 | 6.92 | 1.15 | 3.46 | 0.76 | 2.30 |
| LSH error (Hz) | 0.08 | 0.23 | 0.08 | 0.23 | 0.08 | 0.23 |
| Methods | MRAS | EKF | AI | SIB | RSH-Based | MEH-Based | |
|---|---|---|---|---|---|---|---|
| Characteristics | |||||||
| Only one current sensing | x | x | x | x | 🗸 | 🗸 | |
| No need for voltage sensing | x | x | x | x | 🗸 | 🗸 | |
| No need for an additional power supply | 🗸 | 🗸 | 🗸 | x | 🗸 | 🗸 | |
| Highly accurate estimations (<1 rpm) | x | x | x | x | 🗸 | x | |
| High speed as one of the target zones of operation | 🗸 | 🗸 | 🗸 | x | 🗸 | 🗸 | |
| Insensitive to parameter variations | x | x | 🗸 | 🗸 | 🗸 | 🗸 | |
| No need for previous training | 🗸 | 🗸 | x | 🗸 | 🗸 | 🗸 | |
| No need for parameter estimation | x | x | 🗸 | x | x | 🗸 | |
| Simple implementation | 🗸 | 🗸 | 🗸 | x | 🗸 | 🗸 | |
| Compatibility with MCSA | Medium | Medium | Medium | Low | High | High | |
| EXP4000 | 0.039 | 59.98 | 1792.2 | 0.0040 | 59.501 | 59.462 | 0.039 | −31.84 | Damaged |
| RSH-based algorithm | 0.039 | 59.98 | 1791.6 | 0.0042 | 59.467 | 59.462 | 0.005 | −31.99 | Damaged |
| EXP4000 | 0.036 | 60.01 | 1184.7 | 0.0129 | 58.463 | 59.029 | 0.566 | −56.04 | Healthy |
| RSH-based algorithm | 0.036 | 60.01 | 1190.4 | 0.0081 | 59.032 | 59.029 | 0.003 | −43.46 | Damaged |
| >0.5 rpm | >1.5 rpm | >2.5 rpm | >3.5 rpm | >4.5 rpm | |
|---|---|---|---|---|---|
| Method 1 | 45.57% | 43.04% | 37.97% | 35.44% | 27.85% |
| Method 2 | 18.99% | 12.66% | 7.59% | 6.33% | 2.53% |
| >0.5 rpm | >1.5 rpm | >2.5 rpm | >3.5 rpm | >4.5 rpm | |
|---|---|---|---|---|---|
| Method 1 | 50.63% | 44.30% | 41.77% | 40.51% | 39.24% |
| Method 2 | 29.11% | 25.32% | 24.05% | 22.78% | 17.72% |
| Alg. 1 | Alg. 2 | Alg. 3 | Alg. 4 | Alg. 5 | |
|---|---|---|---|---|---|
| Error > 0.5 rpm | 21.52% | 5.06% | 36.71% | 65.82% | 51.90% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonet-Jara, J.; Quijano-Lopez, A.; Morinigo-Sotelo, D.; Pons-Llinares, J. Sensorless Speed Estimation for the Diagnosis of Induction Motors via MCSA. Review and Commercial Devices Analysis. Sensors 2021, 21, 5037. https://0-doi-org.brum.beds.ac.uk/10.3390/s21155037
Bonet-Jara J, Quijano-Lopez A, Morinigo-Sotelo D, Pons-Llinares J. Sensorless Speed Estimation for the Diagnosis of Induction Motors via MCSA. Review and Commercial Devices Analysis. Sensors. 2021; 21(15):5037. https://0-doi-org.brum.beds.ac.uk/10.3390/s21155037
Chicago/Turabian StyleBonet-Jara, Jorge, Alfredo Quijano-Lopez, Daniel Morinigo-Sotelo, and Joan Pons-Llinares. 2021. "Sensorless Speed Estimation for the Diagnosis of Induction Motors via MCSA. Review and Commercial Devices Analysis" Sensors 21, no. 15: 5037. https://0-doi-org.brum.beds.ac.uk/10.3390/s21155037