
Transfer Learning in Wastewater Treatment Plant Control Design: From Conventional to Long Short-Term Memory-Based Controllers




Abstract
:1. Introduction
- Conventional PI controllers will be substituted by LSTM-based structures able to improve the conventional controller performance.
- The required knowledge of the process under control will be reduced, since the LSTM-based structures only require input and output measurements of the conventional controllers. Besides, these measurements are easily obtained from a well-known WWTP digital framework: the Benchmark Simulation Model No. 1 [25].
- The design and implementation process of the LSTM-based structures will be sped up, since only a LSTM-based structure will be implemented from scratch. The remaining ones will be obtained through TL approaches.
- A fine-tuning process will be carried out to ensure that the control performance of the control loop is improved with respect to the conventional WWTP controller.
2. Materials and Methods
2.1. Benchmark Simulation Model No. 1
2.1.1. BSM1 Layout
- Nitrate and nitrite nitrogen (NO) control loop: control loop in charge of controlling the nitrate and nitrite nitrogen concentration present in the second reactor tank ().
- Dissolved oxygen (DO) control loop: control loop in charge of managing the dissolved oxygen present in the fifth reactor tank ().
2.1.2. BSM1 Simulation and Evaluation Protocols
- Constant influent: Influent profile showing constant influent concentrations and flow rates during 14 days.
- Dry influent: Influent profile showing daily variations of the influent concentrations and without any perturbation induced by weather changes.
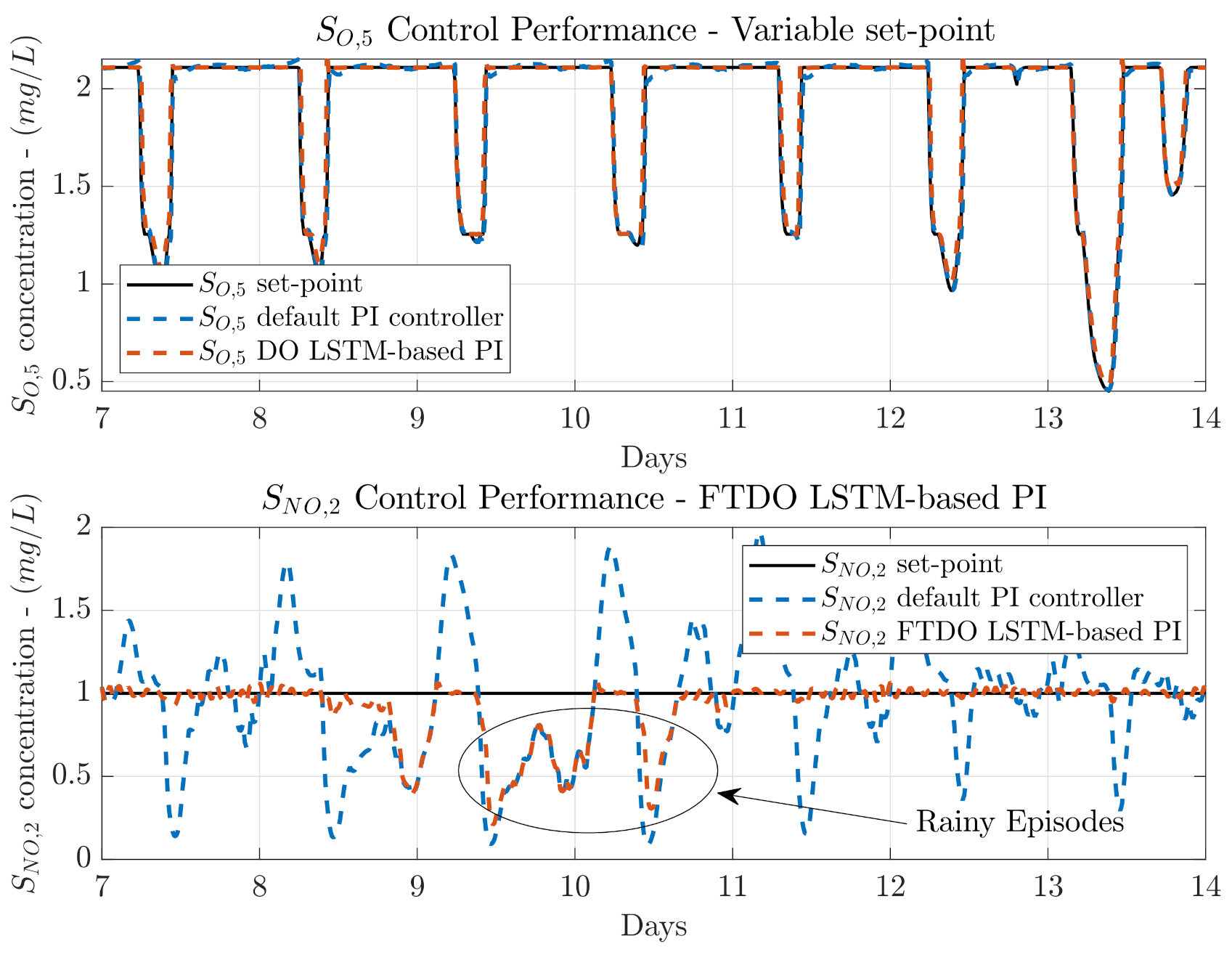
- Rainy influent: Influent profile showing daily variations of the influent concentrations. Two large rainy perturbations are considered during days 9 and 10.
- Stormy influent: Influent profile showing daily variations of the influent concentrations. Two short but intense stormy perturbations are produced at days 8 and 11.
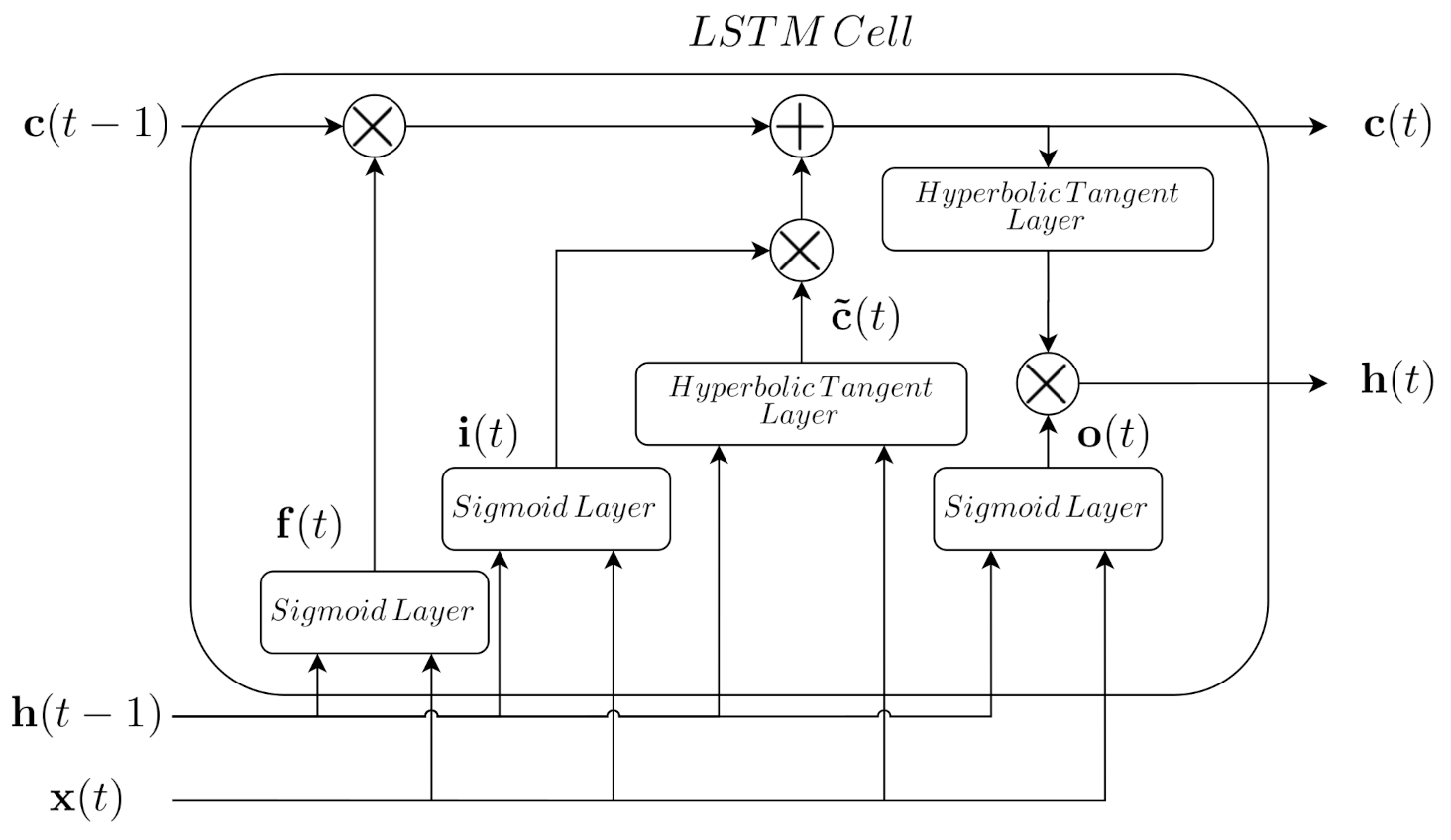
2.2. Long Short-Term Memory Cells
2.3. Transfer Learning
- Inductive Transfer Learning: In inductive transfer learning, the source and target domains do not show data scarcity problems. Therefore, the transfer model can be designed and firstly trained in the source domain and then fine-tuned in the target domain in order to adapt its behaviour to its final application.
- Transductive Transfer Learning: Transductive transfer learning is characterised by the necessity of retraining the transferred model every time a new set of labelled data is available in the target domain. This is motivated by the fact that at the first moment, the target domain has no labelled data.
- Unsupervised Transfer Learning: Unsupervised transfer learning is characterised by the fact that there is no available data neither in the source domain, nor in the target one. Thus, this technique is mainly focused on solving unsupervised tasks like dimensionality reduction.
2.4. Modelling
- NumPy (1.18.1) [33]: library providing a huge amount of tools and operations involving vectors and matrices.
- Scikit-Learn (0.22.1) [34]: library providing most of the functions considered in data preprocessing, cross-validation, and evaluation processes.
- Tensorflow (1.14.0) [35]: library providing lots of ANN structures and techniques. It also implements the Keras API, which offers predefined ANN structures, optimizers, cost functions, or training algorithms. Therefore, nearly any ANN structure can be designed by means of concatenating different predefined Keras structures.
3. TL-Based Control Design
3.1. LSTM-Based PI
- DO Control loop: the measurements involved in the DO control loop are the dissolved oxygen (), its desired set-point (), and the oxygen transfer coefficient of the fifth reactor tank of the WWTP ().
- NO Control loop: the measurements involved in the NO control loop are the nitrate and nitrite nitrogen (), its desired set-point () and the internal recirculation flow of the WWTP ().
- DO LSTM-based PI
- –
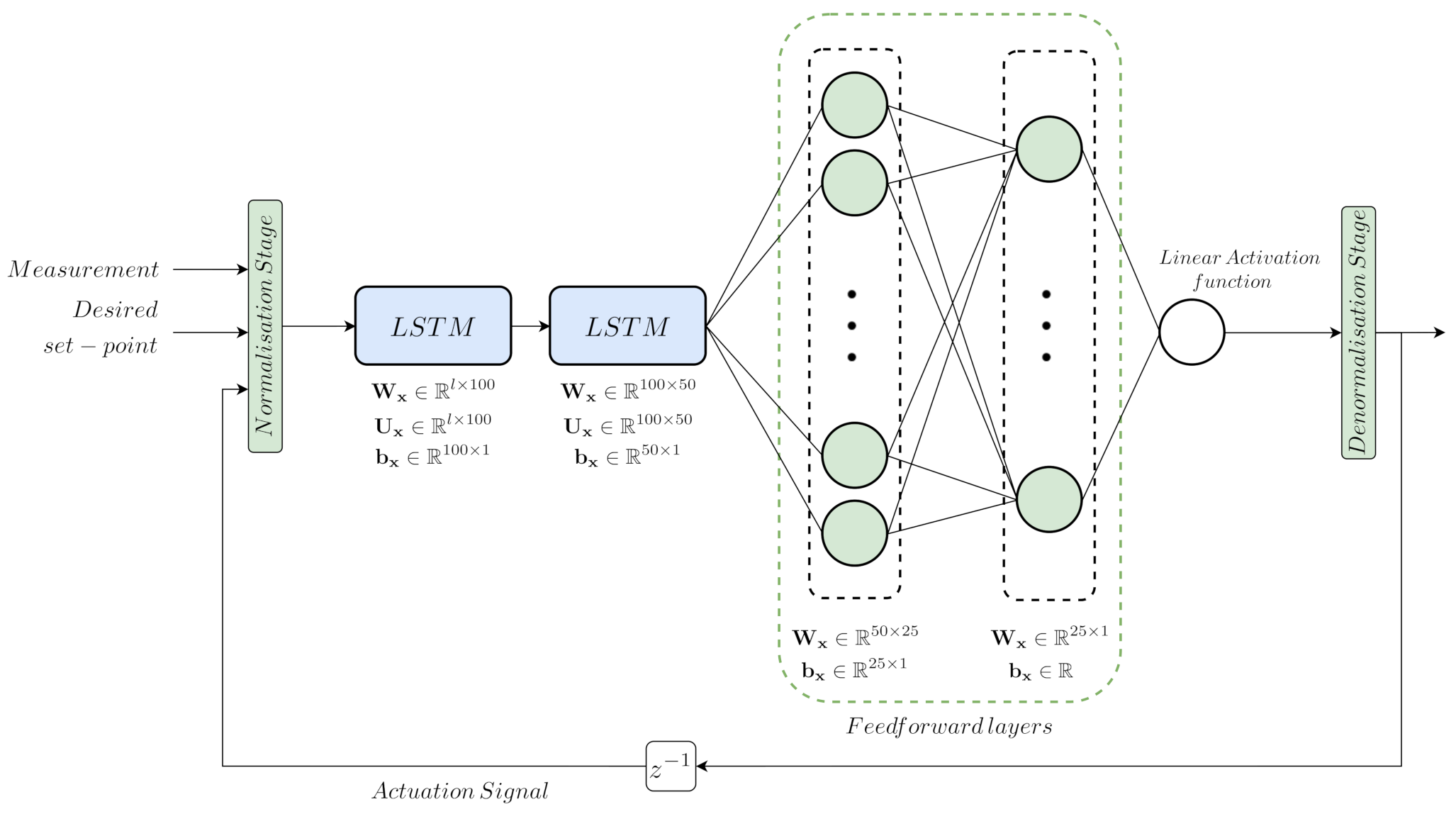
- Input measurements: the dissolved oxygen in the fifth reactor tank () and its desired set-point (). Besides, the DO LSTM-based net considers the Nonlinear Autoregressive Exogenous principle (NARX) where the output predicted by the net will be considered as an extra input. This extra input provides the LSTM-based structure with information about its performance in the prediction process [38], thus it will be able to correct its predictions as a function of this extra input. In this case, the extra input corresponds to the previously computed actuator signal ().
- –
- Normalisation Stage: stage devoted to normalising the input measurements towards zero mean and unity variance.
- –
- LSTM-based Net: main part of the LSTM-based Controller. It consists of two LSTM cells with 100 and 50 hidden neurons and two feed forward layers with 50 and 25 hidden neurons, respectively.
- –
- Denormalisation Stage: stage devoted to denormalising the actuation signal (DO LSTM-based Net output) towards its real range of values.
- –
- Output: the actuation signal which corresponds to the oxygen transfer coefficient of the fifth reactor tank ().
- NO LSTM-based PI
- –
- Input measurements: the nitrate and nitrite nitrogen in the second reactor tank () and its desired set-point (). As it happens with the DO LSTM-based PI, the NO LSTM-based controller also considers the NARX principle. In this case, the extra input corresponds to the previously computed actuator signal ().
- –
- Normalisation Stage: stage devoted to normalising the input measurements towards zero mean and unity variance.
- –
- LSTM-based Net: main part of the LSTM-based Controller. It consists of two LSTM cells with 100 and 50 hidden neurons and two feed forward layers with 50 and 25 hidden neurons, respectively.
- –
- Denormalisation Stage: stage devoted to denormalising the actuation signal (DO LSTM-based Net output) towards its real range of values.
- –
- Output: the actuation signal which corresponds to the WWTP internal recirculation flow rate ().
3.2. Control Knowledge Transfer Approach
- Transfer Learning from DO to NOThe DO LSTM-based PI structure is transferred directly from the DO to the NO control loop. Here, it is important to notice that the structure is not fine-tuned, that is, the LSTM-based PI controller has been trained to manage the concentration. Besides, only the normalisation and denormalisation stages are adapted to the NO control loop measurements.
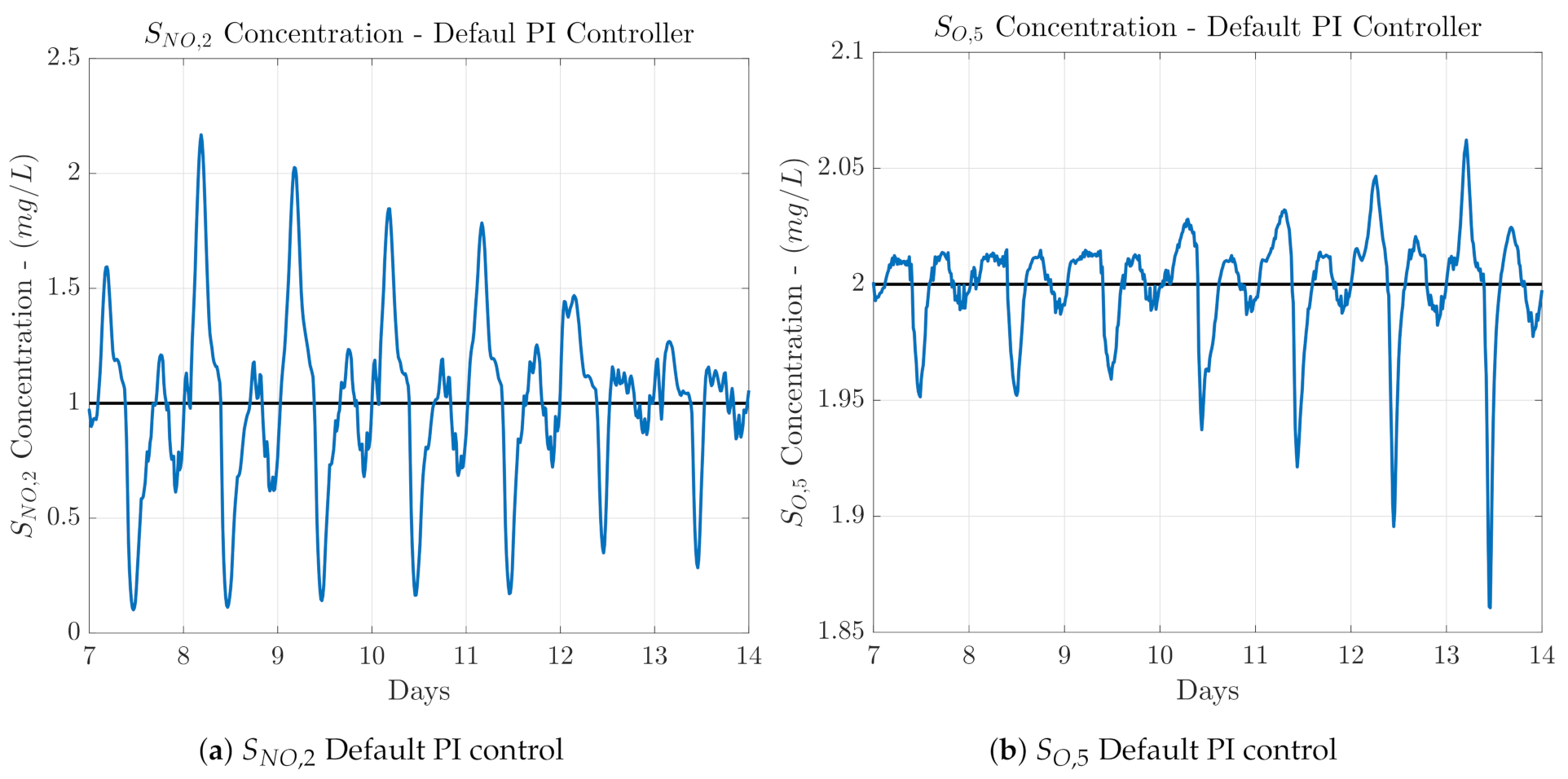
- Transfer Learning from NO to DOThe NO LSTM-based PI structure is directly transferred from the NO to the DO control loop without performing any change, neither in its structure, nor in its weights and biases. Thus, the knowledge on how to manage concentration is transferred into the DO control loop. The unique change performed in this transfer approach corresponds to the normalisation and denormalisation stages. They have been adapted to normalise and denormalise the measurements coming from the NO control loop instead of the DO control loop. Following this, the NO LSTM-based PI will be at least equal to the default PI managing the concentration, that is, the NO control loop PI. If Figure 4 is taken into account, one can assure that the NO LSTM-based PI controller will not offer such a good control performance as the DO LSTM-based PI derived from the DO control loop.
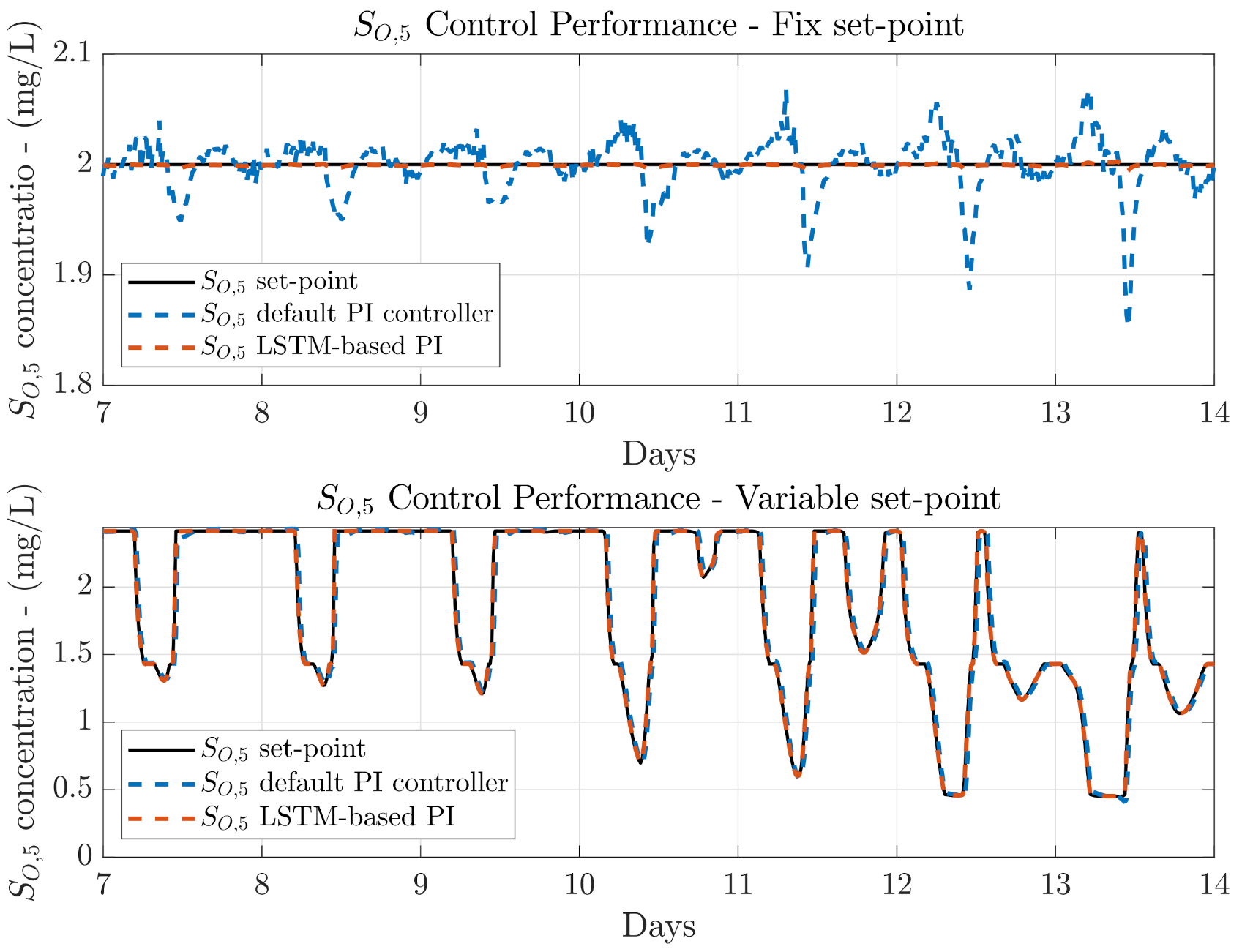
- LSTM-based controller Fine-tuning & TransferThis transfer approach is the most important one since it corresponds to the transfer method performing a fine-tuning process and therefore, adapting the behaviour of the transferred controller to the target domain dynamics. In other words, in this transfer learning approach the LSTM-based controller yielding the best control performance between the Transfer Learning from DO to NO and the Transfer Learning from NO to DO will be considered as the candidate to be fine-tuned. Results in Section 4 show that the best control performance is offered by the DO LSTM-based PI. For that reason, this is the LSTM-based controller considered in the fine-tuning process. Nevertheless, this choice can be done at the very beginning if the performance offered by the conventional PI structures is considered (see Figure 4).In terms of the three TL classes, the LSTM-based controller Fine-tuning and Transfer approach consists in an inductive transfer learning task: data from the source domain, the DO control loop, is considered to firstly obtain the DO LSTM-based PI structure. Then it is fine-tuned (retrained) with data coming from the PI controlling the target domain, the NO control loop. In other words, the default controller whose performance is observed in Figure 4a has been considered to perform the fine-tuning process of the DO LSTM-based PI controller. Thus, the obtained controller, the fine-tuned DO LSTM-based PI (FTDO LSTM-based PI) will know how to correctly manage the desired variable, but adapted to the NO control loop. This clearly shows that an existing controller managing the target control loop is compulsory to obtain the measurements considered in the fine-tuning process. This differs from traditional and conventional TL applications, where labelled data are available.The main point here is that in the fine-tuning process not all the layers of the DO LSTM-based PI controller will be retrained with measurements of the target domain: the weights of the two LSTM cells are blocked whilst the weights and biases of the two feedforward layers (see Figure 5) are modified in the fine-tuning process. The LSTM cells are the ones that are blocked since they are the layers gathering the information about the time-dependence between measurements. The feedforward layers mainly take this information to adapt the output of the controller to the desired control loop. For that reason, these are the layers which will be retrained just to adapt the outcomes of the LSTM layers to the new domain.The measurements of the target domain are again obtained by performing a whole-year simulation of the BSM1 behaviour when the three weather profiles, dry, rainy, and stormy, are randomly distributed. The weights and biases of the two retrained feedforward layers are obtained considering the same training parameters as in the case of the DO LSTM-based PI training process: initial learning rate equals to , the weight decay equals to and the early patience is set to 5 epochs.
4. Results
4.1. TL-Based Control Design Results
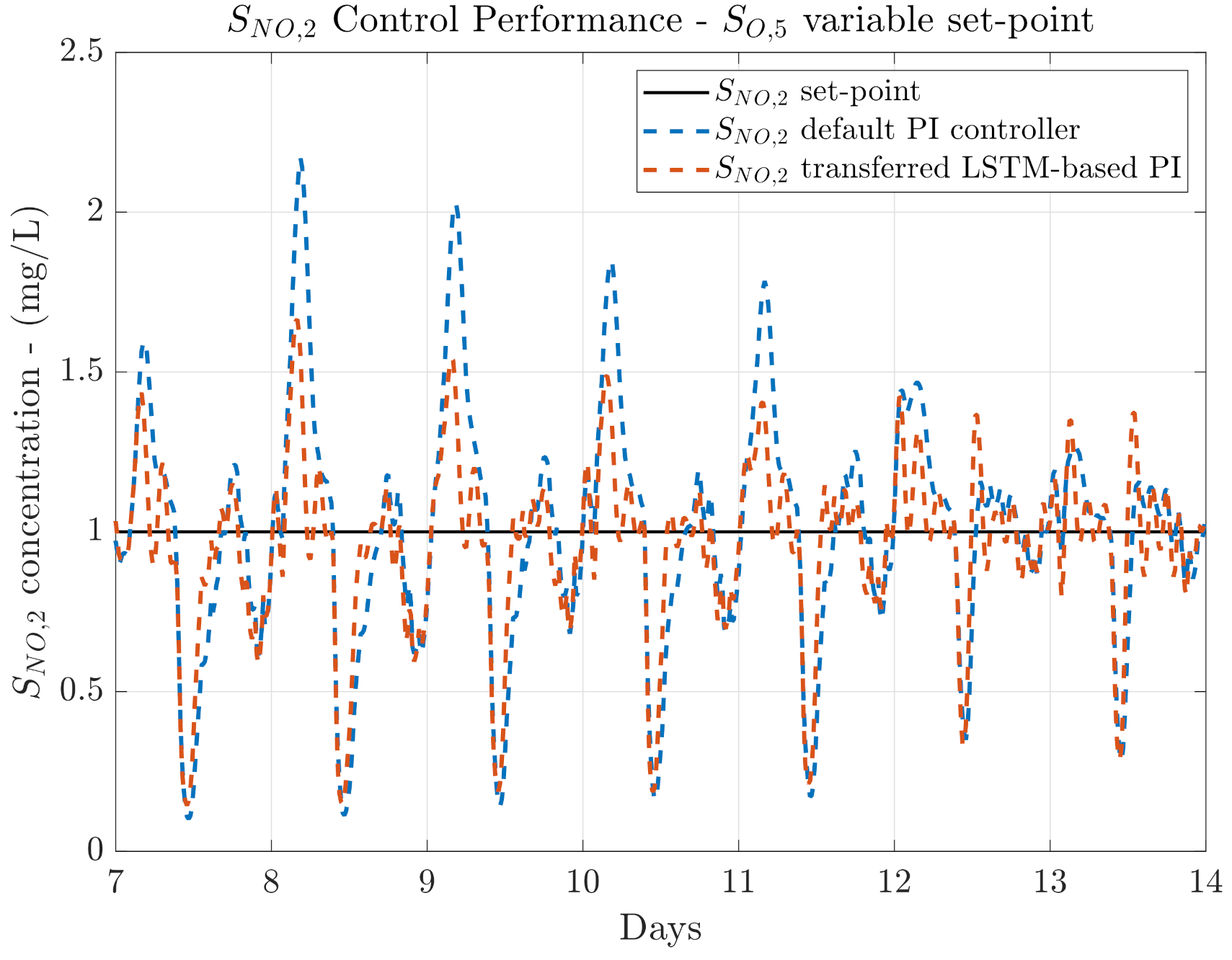
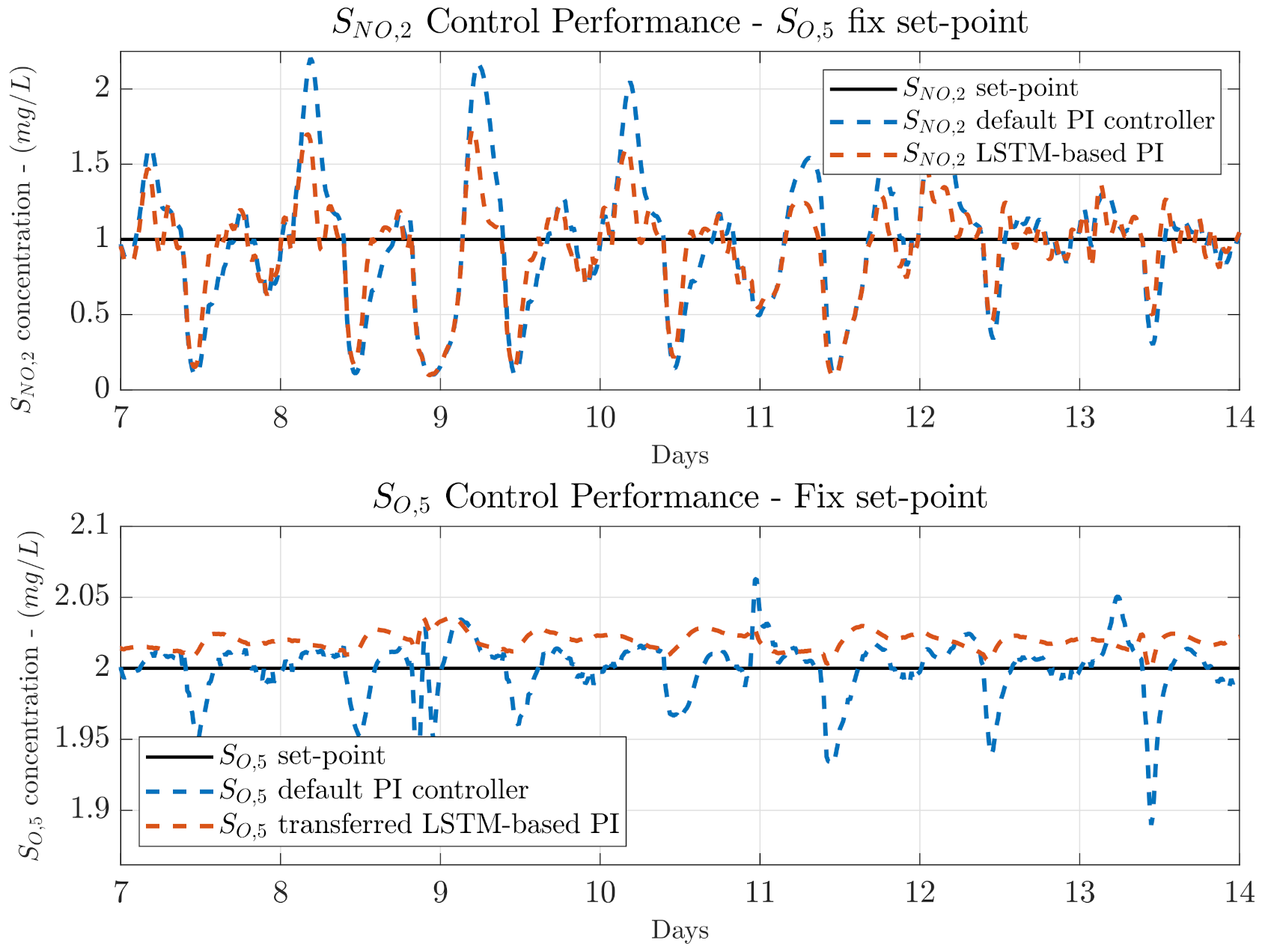
4.2. Transfer Learning from DO to NO
4.3. Transfer Learning from NO to DO
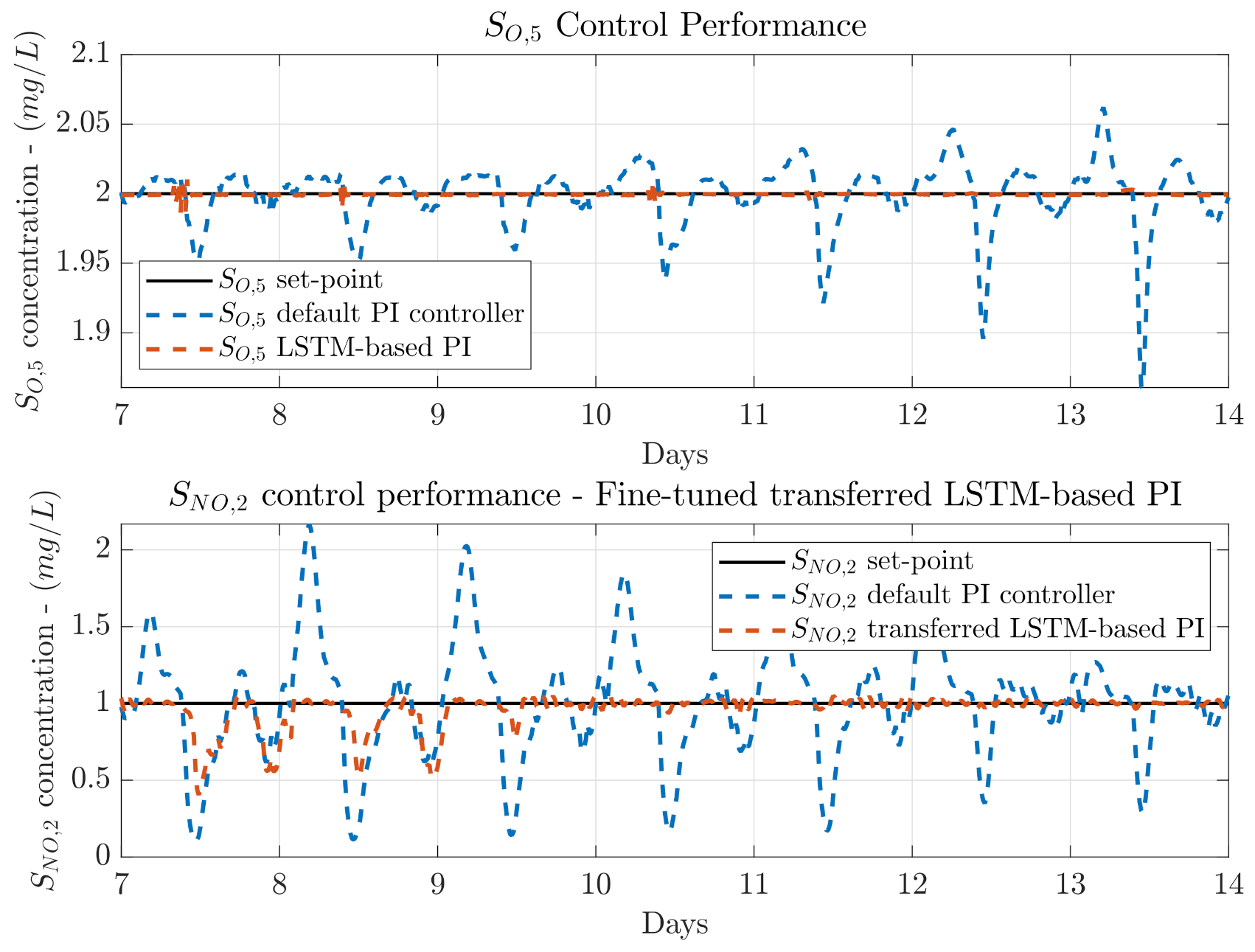
4.4. LSTM-Based Controller Fine-Tuning & Transfer
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| ASM1 | Activated Sludge Model N.1 |
| BSM1 | Benchmark Simulation Model No. 1 |
| BSM1-P | Benchmark Simulation Model No. 1 with Phosphorus processing |
| BSM2 | Benchmark Simulation Model No. 2 |
| Biases of the xth hidden layer | |
| DO | Dissolved Oxygen in the fifth reactor tank () control loop |
| DO LSTM-based PI | LSTM-based PI controller trained with data from the control loop |
| FTDO LSTM-based PI | DO LSTM-based PI fine-tuned with data from the control loop |
| IAE | Integrated Absolute Error |
| ISE | Integrated Squared Error |
| Oxygen Transfer Coefficient of the xth reactor tank measured in | |
| LSTM | Long Short-Term Memory |
| MAE | Mean Absolute Error |
| MAPE | Mean Average Percentage Error |
| MLP | Multilayer Perceptron |
| MPC | Model Predictive Controller |
| NO | Nitrate and nitrite nitrogen in the second reactor tank () control loop |
| NO LSTM-based PI | LSTM-based PI controller trained with data from the control loop |
| PI | Proportional Integral controller |
| PID | Proportional Integral Derivative controller |
| Influent flow rate | |
| Internal recirculation flow rate | |
| External recirculation flow rate | |
| Determination coefficient | |
| RMSE | Root Mean Squared Error |
| Nitrate and nitrite nitrogen in the xth reactor tank measured in mg/L | |
| Ammonium concentration in the xth reactor tank measured in mg/L | |
| Dissolved oxygen concentration in the xth reactor tank measured in mg/L | |
| TL | Transfer Learning |
| Weights affecting the previous output data of the xth hidden layer | |
| WWTP | Wastewater Treatment Plant |
| Weights affecting the input data of the xth hidden layer |
References
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Wollschlaeger, M.; Sauter, T.; Jasperneite, J. The future of industrial communication: Automation networks in the era of the internet of things and industry 4.0. IEEE Ind. Electron. Mag. 2017, 11, 17–27. [Google Scholar] [CrossRef]
- Ustundag, A.; Cevikcan, E. Industry 4.0: Managing the Digital Transformation; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Rani, A.; Singh, V.; Gupta, J. Development of soft sensor for neural network based control of distillation column. ISA Trans. 2013, 52, 438–449. [Google Scholar] [CrossRef]
- Pisa, I.; Santín, I.; Vicario, J.L.; Morell, A.; Vilanova, R. ANN-based soft sensor to predict effluent violations in wastewater treatment plants. Sensors 2019, 19, 1280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thennadil, S.N.; Dewar, M.; Herdsman, C.; Nordon, A.; Becker, E. Automated weighted outlier detection technique for multivariate data. Control Eng. Pract. 2018, 70, 40–49. [Google Scholar] [CrossRef] [Green Version]
- Zejda, V.; Máša, V.; Václavková, Š.; Skryja, P. A Novel Check-List Strategy to Evaluate the Potential of Operational Improvements in Wastewater Treatment Plants. Energies 2020, 13, 5005. [Google Scholar] [CrossRef]
- Alex, J.; Benedetti, L.; Copp, J.; Gernaey, K.V.; Jeppsson, U.; Nopens, I.; Pons, M.N.; Rieger, L.; Rosen, C.; Steyer, J.P.; et al. Benchmark Simulation Model No. 1 (BSM1); Technical Report; Department of Industrial Electrical Engineering and Automation, Lund University: Lund, Sweden, 2008. [Google Scholar]
- Santin, I.; Pedret, C.; Vilanova, R. Fuzzy control and model predictive control configurations for effluent violations removal in wastewater treatment plants. Ind. Eng. Chem. Res. 2015, 54, 2763–2775. [Google Scholar] [CrossRef]
- Santin, I.; Pedret, C.; Vilanova, R. Applying variable dissolved oxygen set point in a two level hierarchical control structure to a wastewater treatment process. J. Process Control 2015, 28, 40–55. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Pisa, I.; Santín, I.; Morell, A.; Vicario, J.L.; Vilanova, R. LSTM based Wastewater Treatment Plants operation strategies for effluent quality improvement. IEEE Access 2019, 7, 159773–159786. [Google Scholar] [CrossRef]
- Sadeghassadi, M.; Macnab, C.J.; Gopaluni, B.; Westwick, D. Application of neural networks for optimal-setpoint design and MPC control in biological wastewater treatment. Comput. Chem. Eng. 2018, 115, 150–160. [Google Scholar] [CrossRef]
- Hernández-del Olmo, F.; Gaudioso, E.; Dormido, R.; Duro, N. Tackling the start-up of a reinforcement learning agent for the control of wastewater treatment plants. Knowl.-Based Syst. 2018, 144, 9–15. [Google Scholar] [CrossRef]
- Pisa, I.; Morell, A.; Vicario, J.L.; Vilanova, R. Denoising Autoencoders and LSTM-Based Artificial Neural Networks Data Processing for Its Application to Internal Model Control in Industrial Environments—The Wastewater Treatment Plant Control Case. Sensors 2020, 20, 3743. [Google Scholar] [CrossRef]
- Kasireddy, I.; Nasir, A.W.; Singh, A.K. IMC based Controller Design for Automatic Generation Control of Multi Area Power System via Simplified Decoupling. Int. J. Control Autom. 2018, 16, 994–1010. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, W.; Luan, Z.; Gao, Q.; Deng, K. Decoupling control of vehicle chassis system based on neural network inverse system. Mech. Syst. Signal Prossess. 2018, 106, 176–197. [Google Scholar] [CrossRef]
- Souza, F.A.; Araújo, R.; Mendes, J. Review of soft sensor methods for regression applications. Chemom. Intell. Lab. Syst. 2016, 152, 69–79. [Google Scholar] [CrossRef]
- Amirabadi, M.A.; Kahaei, M.H.; Nezamalhosseini, S.A. Novel suboptimal approaches for hyperparameter tuning of deep neural network [under the shelf of optical communication]. Phys. Commun. 2020, 41, 101057. [Google Scholar] [CrossRef]
- Zhuang, F.; Qi, Z.; Duan, K.; Xi, D.; Zhu, Y.; Zhu, H.; Xiong, H.; He, Q. A Comprehensive Survey on Transfer Learning. Proc. IEEE 2021, 109, 43–76. [Google Scholar] [CrossRef]
- Sarkar, D.; Bali, R.; Ghosh, T. Hands-On Transfer Learning with Python: Implement Advanced Deep Learning and Neural Network Models Using TensorFlow and Keras; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- Curreri, F.; Patanè, L.; Xibilia, M.G. RNN-and LSTM-Based Soft Sensors Transferability for an Industrial Process. Sensors 2021, 21, 823. [Google Scholar] [CrossRef]
- Miccio, M.; Cosenza, B. Control of a distillation column by type-2 and type-1 fuzzy logic PID controllers. J. Process Control 2014, 24, 475–484. [Google Scholar] [CrossRef]
- Pisa, I.; Morell, A.; Vicario, J.L.; Vilanova, R. Transfer Learning Approach for the Design of Basic Control Loops in Wastewater Treatment Plants. In Proceedings of the 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021. [Google Scholar]
- Copp, J.B. The Cost Simulation Benchmark: Description and Simulator Manual (Cost Action 624 and Action 682); Office for Official Publications of the European Union: Luxembourg, 2002. [Google Scholar]
- Henze, M.; Grady, L., Jr.; Gujer, W.; Marais, G.; Matsuo, T. Activated Sludge Model No 1. IAWPRC Scientific and Technical Reports; IAWPRC: London, UK, 1987; Volume 29. [Google Scholar]
- Halling-Sørensen, B.; Jorgensen, S.E. The Removal of Nitrogen Compounds from Wastewater; Elsevier: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Henze, M.; Gujer, W.; Mino, T.; van Loosdrecht, M.C. Activated Sludge Models ASM1, ASM2, ASM2d and ASM3; IWA Publishing: London, UK, 2000. [Google Scholar]
- Gernaey, K.V.; Jørgensen, S.B. Benchmarking combined biological phosphorus and nitrogen removal wastewater treatment processes. Control Eng. Prac. 2004, 12, 357–373. [Google Scholar] [CrossRef]
- Gernaey, K.V.; Jeppsson, U.; Vanrolleghem, P.A.; Copp, J.B.; International Water Association. Task Group on Benchmarking of Control Strategies for Wastewater Treatment Plants. In Benchmarking of Control Strategies for Wastewater Treatment Plants; IWA Publishing: London, UK, 2014. [Google Scholar]
- Martin, C.; Vanrolleghem, P.A. Analysing, completing, and generating influent data for WWTP modelling: A critical review. Environ. Model. Softw. 2014, 60, 188–201. [Google Scholar] [CrossRef] [Green Version]
- Modelling & Integrated Assessment, Benchmarking. Available online: http://iwa-mia.org/benchmarking/ (accessed on 9 November 2020).
- Oliphant, T.E. A Guide to NumPy; Trelgol Publishing: Spanish Fork, UT, USA, 2006; Volume 1. [Google Scholar]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: https://www.tensorflow.org/ (accessed on 5 October 2020).
- Vilanova, R.; Visioli, A. PID Control in the Third Millennium—Lessons Learned and News Approaches; Springer: London, UK, 2012. [Google Scholar]
- Da Silva, I.N.; Spatti, D.H.; Flauzino, R.A.; Liboni, L.H.B.; dos Reis Alves, S.F. Artificial Neural Networks; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Boussaada, Z.; Curea, O.; Remaci, A.; Camblong, H.; Mrabet Bellaaj, N. A nonlinear autoregressive exogenous (NARX) neural network model for the prediction of the daily direct solar radiation. Energies 2018, 11, 620. [Google Scholar] [CrossRef] [Green Version]
- Manu, D.S.; Thalla, A.K. Artificial intelligence models for predicting the performance of biological wastewater treatment plant in the removal of Kjeldahl Nitrogen from wastewater. Appl. Water Sci. 2017, 7, 3783–3791. [Google Scholar] [CrossRef] [Green Version]
- Qiao, J.F.; Hou, Y.; Zhang, L.; Han, H.G. Adaptive fuzzy neural network control of wastewater treatment process with multiobjective operation. Neurocomputing 2018, 275, 383–393. [Google Scholar] [CrossRef]
- Santín, I.; Barbu, M.; Pedret, C.; Vilanova, R. Dissolved Oxygen Control in Biological Wastewater Treatments with Non-Ideal Sensors and Actuators. Ind. Eng. Chem. Res. 2019, 58, 20639–20654. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LSTM-Based Prediction Performance | |||||
|---|---|---|---|---|---|
| RMSE | MAE | MAPE | Training Time | ||
| DO LSTM-based PI | 0.026 mg/L | 0.018 mg/L | 1.347% | 0.999 | 69.91 s |
| NO LSTM-based PI | 0.048 mg/L | 0.037 mg/L | 6.26% | 0.997 | 98.60 s |
| Transfer Learning from DO to NO Control Loop | ||||||
|---|---|---|---|---|---|---|
| Fix Set-point | ||||||
| Dry Weather | Rainy Weather | Stormy Weather | ||||
| Structure | IAE | ISE | IAE | ISE | IAE | ISE |
| PI— | 0.148 | 0.007 | 0.143 | 0.007 | 0.158 | 0.007 |
| DO LSTM-based PI— | 0.006 | 0.006 | 0.006 | |||
| PI— | 1.594 | 0.691 | 1.922 | 0.951 | 1.874 | 0.977 |
| DO LSTM-based PI— | 1.008 | 0.290 | 1.401 | 0.578 | 1.033 | 0.357 |
| Variable Set-point | ||||||
| PI— | 0.185 | 0.016 | 0.155 | 0.014 | 0.206 | 0.020 |
| DO LSTM-based PI— | 0.013 | 0.016 | 0.016 | |||
| PI— | 1.792 | 0.858 | 2.132 | 1.089 | 1.884 | 0.989 |
| DO LSTM-based PI— | 1.271 | 0.503 | 1.672 | 0.758 | 1.358 | 0.593 |
| Transfer Learning from NO to DO Control Loop | ||||||
|---|---|---|---|---|---|---|
| Fix Set-point | ||||||
| Dry Weather | Rainy Weather | Stormy Weather | ||||
| Structure | IAE | ISE | IAE | ISE | IAE | ISE |
| PI— | 1.594 | 0.691 | 1.922 | 0.951 | 1.874 | 0.977 |
| NO LSTM-based PI— | 1.302 | 0.486 | 1.399 | 0.542 | 1.360 | 0.543 |
| PI— | 0.148 | 0.007 | 0.143 | 0.007 | 0.158 | 0.007 |
| NO LSTM-based PI— | 0.158 | 0.004 | 0.146 | 0.004 | 0.160 | 0.004 |
| Variable Set-point | ||||||
| PI— | 1.792 | 0.858 | 2.132 | 1.089 | 1.884 | 0.989 |
| NO LSTM-based PI— | 1.266 | 0.464 | 1.574 | 0.662 | 1.372 | 0.557 |
| PI— | 0.185 | 0.016 | 0.155 | 0.014 | 0.206 | 0.020 |
| NO LSTM-based PI— | 0.288 | 0.030 | 0.239 | 0.022 | 0.385 | 0.049 |
| LSTM-Based Controller Fine-Tuning & Transfer | ||||||
|---|---|---|---|---|---|---|
| Fix Set-point | ||||||
| Dry Weather | Rainy Weather | Stormy Weather | ||||
| Structure | IAE | ISE | IAE | ISE | IAE | ISE |
| PI— | 0.143 | 0.007 | 0.143 | 0.007 | 0.158 | 0.007 |
| DO LSTM-based PI— | 0.004 | 0.008 | 0.006 | |||
| PI— | 1.594 | 0.691 | 1.922 | 0.951 | 1.874 | 0.977 |
| FTDO LSTM-based PI— | 0.091 | 0.002 | 1.150 | 0.625 | 0.357 | 0.151 |
| Variable Set-point | ||||||
| PI— | 0.185 | 0.016 | 0.155 | 0.014 | 0.206 | 0.020 |
| DO LSTM-based PI— | 0.013 | 0.017 | 0.017 | |||
| PI— | 1.792 | 0.858 | 2.132 | 1.089 | 1.884 | 0.989 |
| FTDO LSTM-based PI— | 0.129 | 0.004 | 0.643 | 0.261 | 0.324 | 0.122 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pisa, I.; Morell, A.; Vilanova, R.; Vicario, J.L. Transfer Learning in Wastewater Treatment Plant Control Design: From Conventional to Long Short-Term Memory-Based Controllers. Sensors 2021, 21, 6315. https://0-doi-org.brum.beds.ac.uk/10.3390/s21186315
Pisa I, Morell A, Vilanova R, Vicario JL. Transfer Learning in Wastewater Treatment Plant Control Design: From Conventional to Long Short-Term Memory-Based Controllers. Sensors. 2021; 21(18):6315. https://0-doi-org.brum.beds.ac.uk/10.3390/s21186315
Chicago/Turabian StylePisa, Ivan, Antoni Morell, Ramón Vilanova, and Jose Lopez Vicario. 2021. "Transfer Learning in Wastewater Treatment Plant Control Design: From Conventional to Long Short-Term Memory-Based Controllers" Sensors 21, no. 18: 6315. https://0-doi-org.brum.beds.ac.uk/10.3390/s21186315