
DATSURYOKU Sensor—A Capacitive-Sensor-Based Belt for Predicting Muscle Tension: Preliminary Results

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
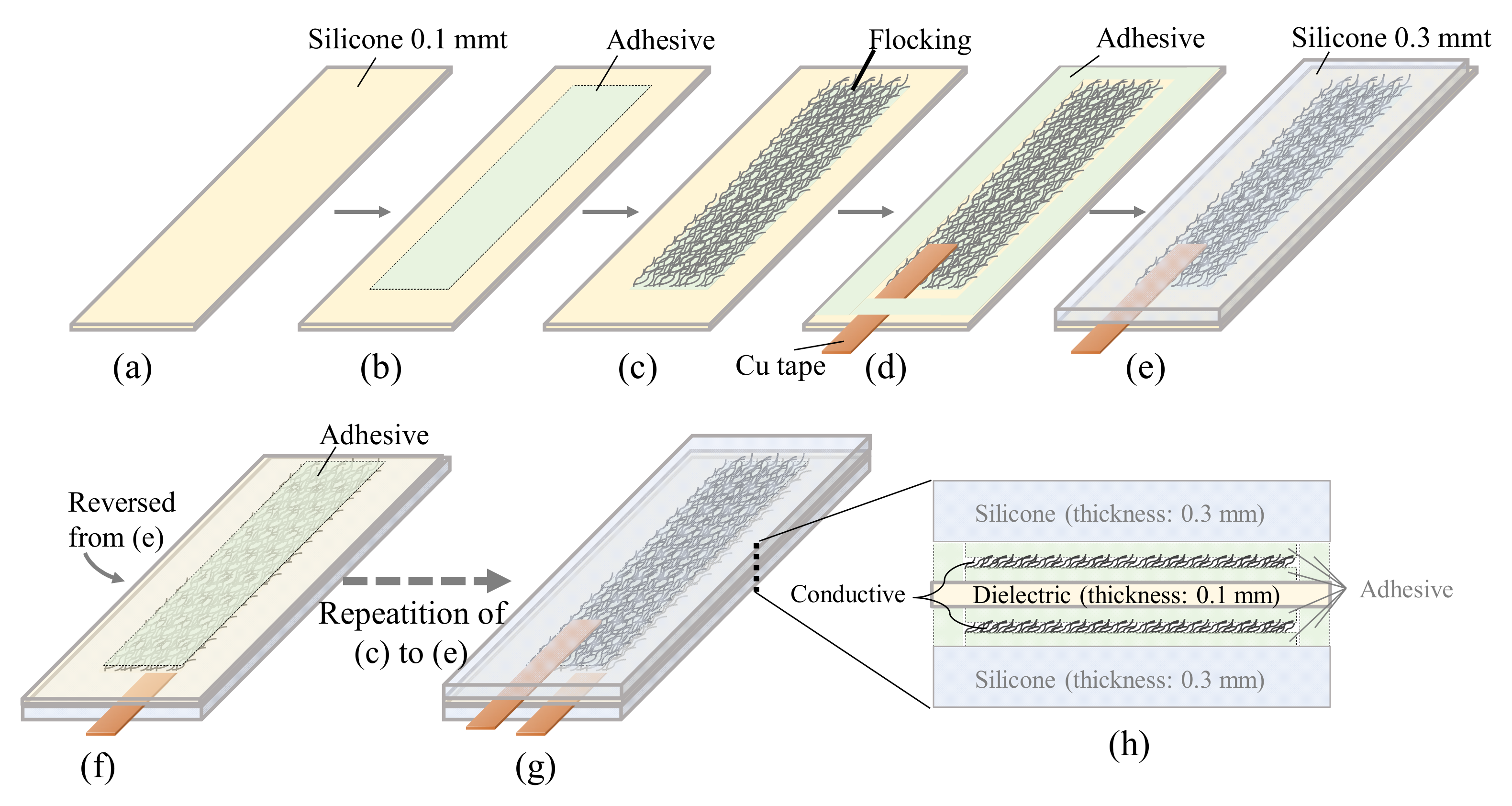
2.1. Sensor Fabrication
2.2. Experiments on Human Subject
3. Results
3.1. Evaluation of the DATSURYOKU Sensor
3.2. Evaluation of Human Subject Experiments
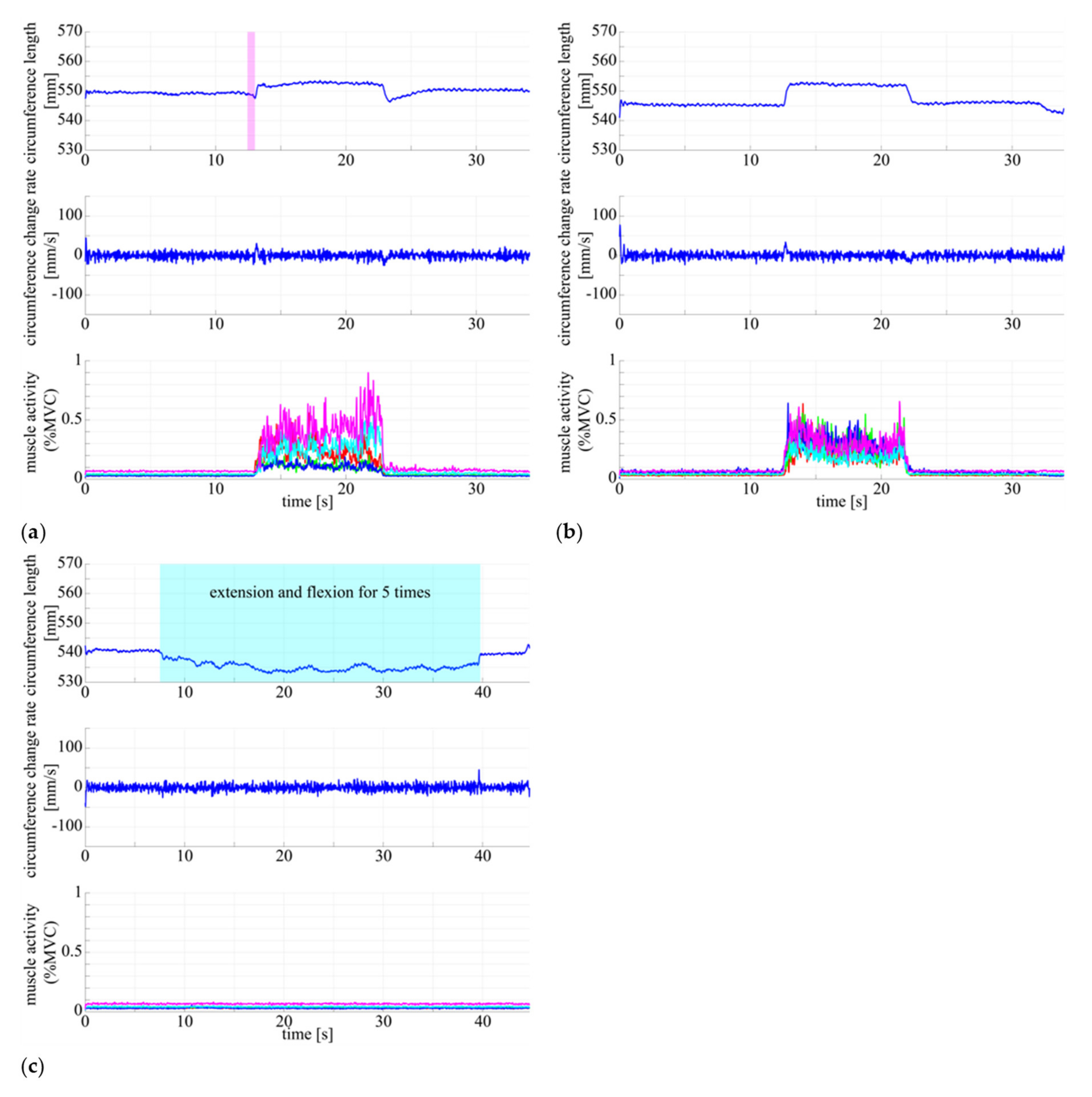
- As shown in Figure 5a,b, the circumference increases in synchronization with the muscle activities. The same pattern of circumference change occurred regardless of standing or sitting posture. In the passive extension and flexion of the knee joint in the sitting position, no muscle activity was observed, and no increase in circumference was observed.
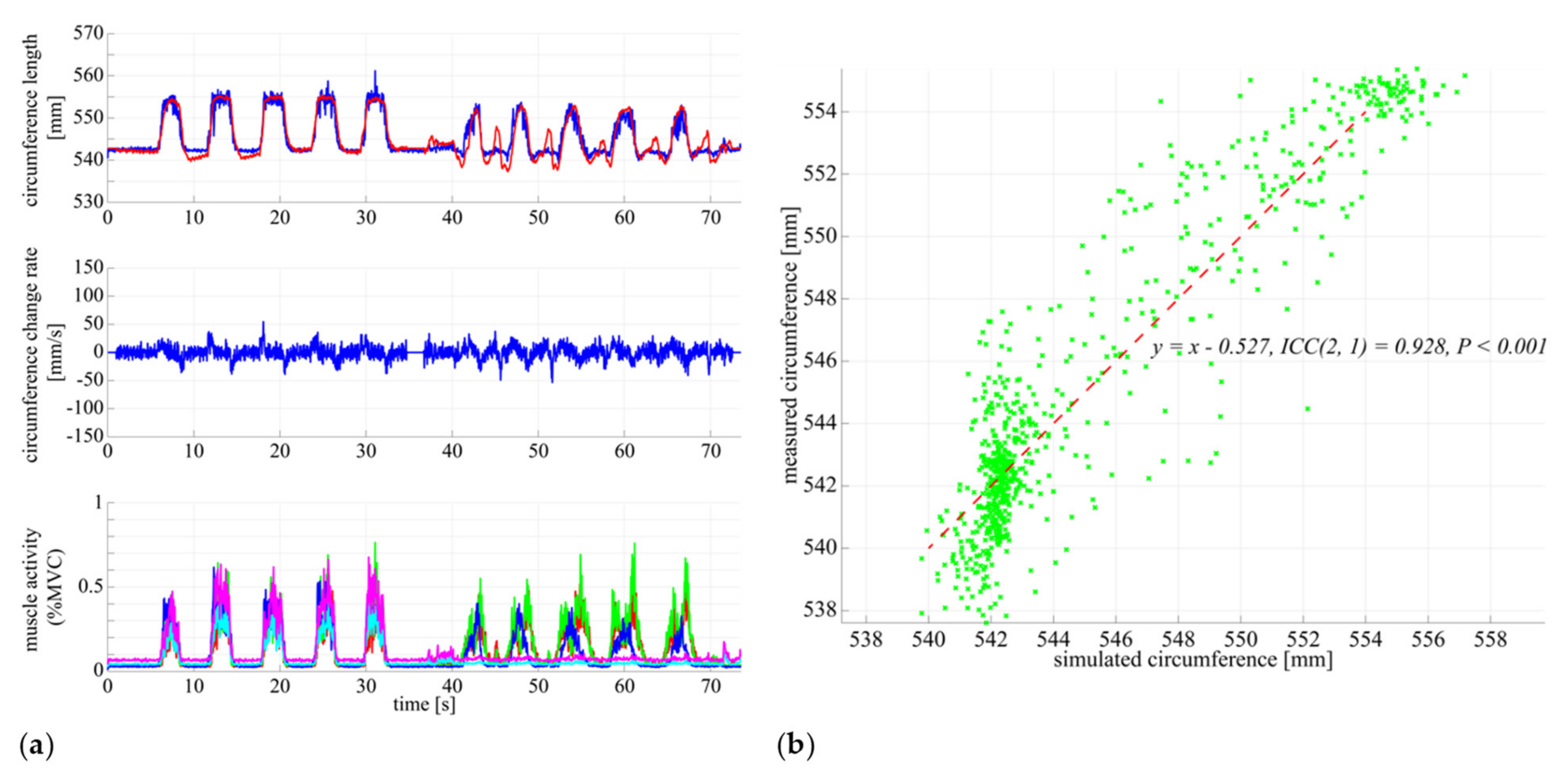
- In Figure 8, the model obtained by the least square problem well represents the relationship between muscle activities and circumference for both co-contraction in the sitting position and squatting, in which no muscle co-contraction was observed. The mean square error between the measured circumference and the circumference calculated from the EMG potential was 1.83 mm. The regression line between the two circumferences was , indicating a high interclass correlation.
4. Discussion
- Figure 5a,b show that the DATSURYOKU sensor can measure changes in circumference in response to muscle activity. The pattern of the change is similar to the pattern of the muscle activities regardless of posture, such as standing or sitting. In the standing position, the circumference of the muscle decreases at the beginning of the transition from standing to co-contraction and then increase after the decrease (magenta section in Figure 5a), which may be because of the temporary muscle relaxation before co-contraction. These results show that it is possible to measure the muscle tension and co-contraction that do not appear in the motion by measuring the circumference. In Figure 5c, the circumference decreases during passive extension and flexion of the knee joint, which may be because of passive muscle relaxation caused by the shortening of the muscle length during passive knee joint extension. The circumference is believed to decrease owing to the tightening force applied by the sensor. These results indicate that the DATSURYOKU sensor can measure muscle tension and co-contraction that do not appear in motion, as well as passive deformation of muscles that do not appear in muscle activity.
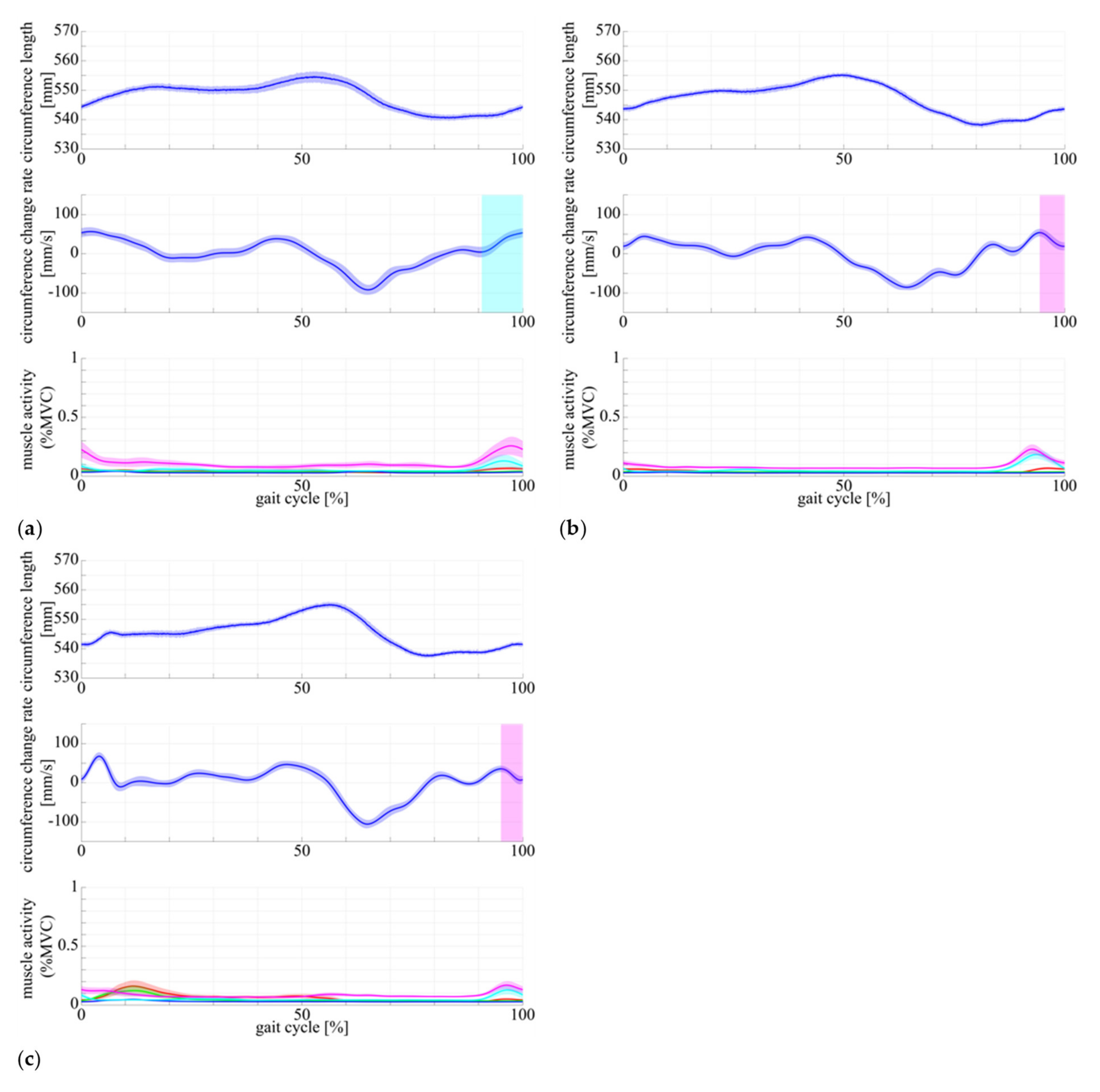
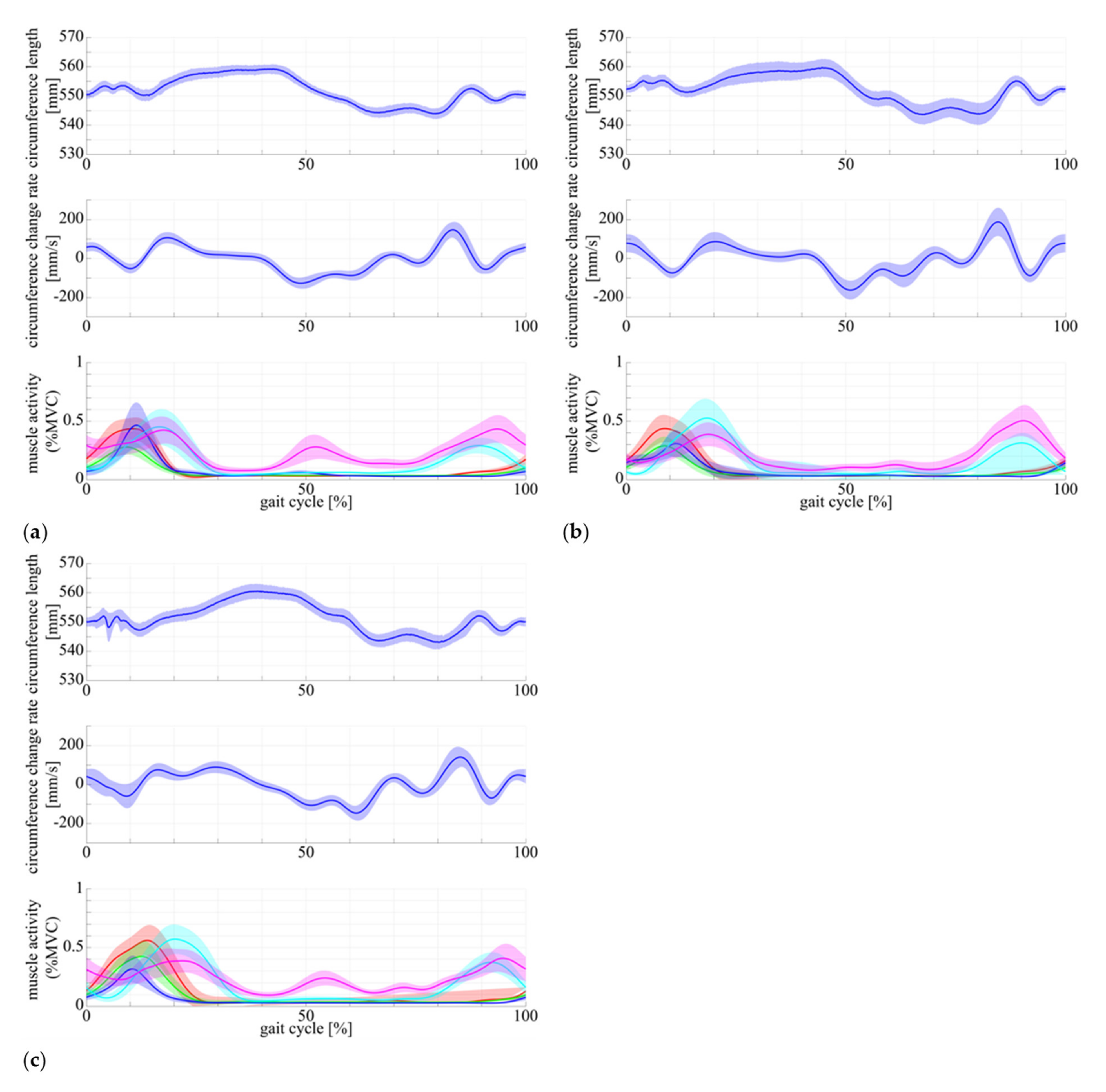
- From Figure 6 and Figure 7, muscle activity occurs in synchronization with the walking and running cycles, and the pattern of circumference change occurs correspondingly. The coefficient of variation, which is the average standard deviation between gait cycles divided by the average amplitude of one cycle, was small (8.19% for walking and 1.68% for running), whereas the muscle activity (%MVC) was 1.56% and 2.90% for walking and running, respectively. This result indicates that the DATSURYOKU sensor can stably measure the circumference, which represents the muscle state. The difference in the patterns between (a) conscious co-contraction, (b) neutral, and (c) conscious relaxation is that in (a) the muscle tension increases toward heel contact (positive velocity of circumference change, cyan sections in Figure 6a, while in (b) and (c) the muscle tension decreases and then increases (magenta sections in Figure 6b,c). In addition, the amplitudes within a cycle (a) < (b) < (c) in Table 1 indicate that the muscle tends to always exert itself in (a), whereas in (c), the muscle activity is well modulated. This result suggests that by observing the circumference pattern of the DATSURYOKU sensor, it is possible to detect persistent muscle tension, etc., and to estimate the risk of injury, such as load on the knee joint.
- Figure 8 shows that the model obtained by the least square problem well represents the relationship between muscle potential and circumference for both co-contraction and squatting in the sitting position. The regression line between them is , which shows a high interclass correlation. This indicates that the circumference represents the muscle state well both with and without co-contraction, and that the DATSURYOKU sensor is suitable for measuring excessive muscle tension and co-contraction, which is the aim of this paper. The root mean square error between the measured circumference and the circumference calculated from the muscle activities is 1.83 mm. Considering that the amplitude in the walking cycle is 1.62 mm on average of (a), (b), and (c), and that in the running cycle is 1.63 mm on average of (a), (b), and (c), the obtained model estimates the muscle state with high accuracy. Figure 8a shows that the error becomes larger when the circumference decreases. In Figure 8b, the distribution of points spreads vertically where the circumference becomes negative. This result reveals that the circumference measured by the DATSURYOKU sensor shows passive deformation, while the muscle activity becomes zero. These results indicate that the DATSURYOKU sensor can measure muscle passive deformation that does not appear in muscle activity.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Strategic Initiative Promoting Preemptive Medicine in a Hyper-Aged Society. Available online: https://www.jst.go.jp/crds/pdf/2010/SP/CRDS-FY2010-SP-09.pdf (accessed on 31 August 2021).
- Murai, A.; Washino, S.; Mochimaru, M. DATSURYOKU: Designing Environment–Body Interaction for Implicit Muscle Relief. Adv. Robot. 2021. under review. [Google Scholar]
- Apple Watch. Available online: https://www.apple.com/watch/ (accessed on 31 August 2021).
- Longmore, S.K.; Lui, G.Y.; Naik, G.; Breen, P.P.; Jalaludin, B.; Gargiulo, G.D. A comparison of reflective photoplethysmography for detection of heart rate, blood oxygen saturation, and respiration rate at various anatomical locations. Sensors 2019, 19, 1874. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghamri, Y.; Proença, M.; Hofmann, G.; Renevey, P.; Bonnier, P.; Braun, F.; Axis, A.; Lemay, M.; Schoettker, P. Automated pulse oximeter waveform analysis to track changes in blood pressure during anesthesia induction: A proof-of-concept study. Anesth. Analg. 2020, 130, 1222–1233. [Google Scholar] [CrossRef] [PubMed]
- Schoettker, P.; Degott, J.; Hofmann, G.; Proença, M.; Bonnier, G.; Lemkaddem, A.; Lemay, M.; Schorer, R.; Christen, U.; Knebel, J.; et al. Blood pressure measurements with the OptiBP smartphone app validated against reference auscultatory measurements. Sci. Rep. 2020, 10, 17827. [Google Scholar] [CrossRef] [PubMed]
- Criswell, E. Cram’s Introduction to Surface Electromyography; Jones & Bartlett Publishers: Sudbury, MA, USA, 2010. [Google Scholar]
- Esposito, D.; Andreozzi, E.; Fratini, A.; Gargiulo, G.; Savino, S.; Niola, V.; Bifulco, P. A Piezoresistive Sensor to Measure Muscle Contraction and Mechanomyography. Sensors 2018, 18, 2553. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, Q.; Lee, J.; Shen, X.; Chen, X.; Kim, J. Graphene-based wearable piezoresistive physical sensors. Materialtoday 2020, 36, 158–179. [Google Scholar] [CrossRef]
- Nakamura, Y.; Yamane, K.; Fujita, Y.; Suzuki, I. Somatosensory computation for man-machine interface from motion-capture data and musculoskeletal human model. IEEE Trans. Robot. 2005, 21, 58–66. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Thelen, D.G. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murai, A.; Takeichi, K.; Miyatake, T.; Nakamura, Y. Musculoskeletal modeling and physiological validation. In Proceedings of the 2014 IEEE International Workshop on Advanced Robotics and Its Social Impacts, Evanston, IL, USA, 11–13 September 2014; pp. 108–113. [Google Scholar]
- Ancans, A.; Greitans, M.; Cacurs, R.; Banga, B.; Rozentals, A. Wearable Sensor Clothing for Body Movement Measurement during Physical Activities in Healthcare. Sensors 2021, 21, 2068. [Google Scholar] [CrossRef] [PubMed]
- Nobeshima, T.; Uemura, S.; Yoshida, M.; Kamata, T. Stretchable conductor from oriented short conductive fibers for wiring soft electronics. Polym. Bull. 2016, 73, 2521–2529. [Google Scholar] [CrossRef]
- Ferber, R.; Davis, I.M.; Williams, I.D.S. Gender differences in lower extremity mechanics during running. Clin. Biomech. 2003, 18, 350–357. [Google Scholar] [CrossRef]
- Gordon, K.E.; Ferris, D.P. Learning to walk with a robotic ankle exoskeleton. J. Biomech. 2007, 40, 2636–2644. [Google Scholar] [CrossRef] [PubMed]
- Martin, J.P.; Li, Q. Overground vs. treadmill walking on biomechanical energy harvesting: An energetics and EMG study. Gait Posture 2017, 52, 124–128. [Google Scholar] [CrossRef] [PubMed]
- Zeni, J.A., Jr.; Richards, J.G.; Higginson, J.S. Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 2008, 27, 710–714. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Technical Information from Mitsufuji Corporation. Available online: https://www.mitsufuji.co.jp/agposs/ (accessed on 31 August 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Walk | Run | |||||
|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (d) | (e) | (f) | |
| Average amplitude in a cycle (mm) | 130 | 130 | 128 | 135 | 135 | 134 |
| Average deviation between cycles (mm) | 1.31 | 0.924 | 0.963 | 1.72 | 2.69 | 2.38 |
| Coefficient of variation (%) | 0.998 | 0.710 | 0.751 | 1.28 | 1.98 | 1.77 |
| Walk | Run | |||||
|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (d) | (e) | (f) | |
| Average amplitude in a cycle | 0.0554 | 0.0487 | 0.0559 | 0.128 | 0.123 | 0.140 |
| Average deviation between cycles | 0.0120 | 0.00561 | 0.00977 | 0.0364 | 0.0412 | 0.0390 |
| Coefficient of variation (%) | 19.2 | 10.8 | 16.9 | 27.3 | 32.1 | 27.7 |
| EMG | DATSURYOKU Sensor | |
|---|---|---|
| measurable detailedness | independent muscle activity | effect of all muscles involved in circumstance |
| measurable characteristics | muscle activity | muscle status that involves activity and passive deformation |
| stability | electric contact impedance changes because of sweat and motion | physical displacement affects |
| battery | high sampling consumes power | low sampling |
| calibration | need to measure MVC at each attachment. | need to calibrate once for one sensor. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murai, A.; Kanazawa, S.; Ayusawa, K.; Washino, S.; Yoshida, M.; Mochimaru, M. DATSURYOKU Sensor—A Capacitive-Sensor-Based Belt for Predicting Muscle Tension: Preliminary Results. Sensors 2021, 21, 6669. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196669
Murai A, Kanazawa S, Ayusawa K, Washino S, Yoshida M, Mochimaru M. DATSURYOKU Sensor—A Capacitive-Sensor-Based Belt for Predicting Muscle Tension: Preliminary Results. Sensors. 2021; 21(19):6669. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196669
Chicago/Turabian StyleMurai, Akihiko, Shusuke Kanazawa, Ko Ayusawa, Sohei Washino, Manabu Yoshida, and Masaaki Mochimaru. 2021. "DATSURYOKU Sensor—A Capacitive-Sensor-Based Belt for Predicting Muscle Tension: Preliminary Results" Sensors 21, no. 19: 6669. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196669