
Multi-Domain Convolutional Neural Networks for Lower-Limb Motor Imagery Using Dry vs. Wet Electrodes

 ,
, 
 ,
, 


Abstract
:1. Introduction
2. Materials and Methods
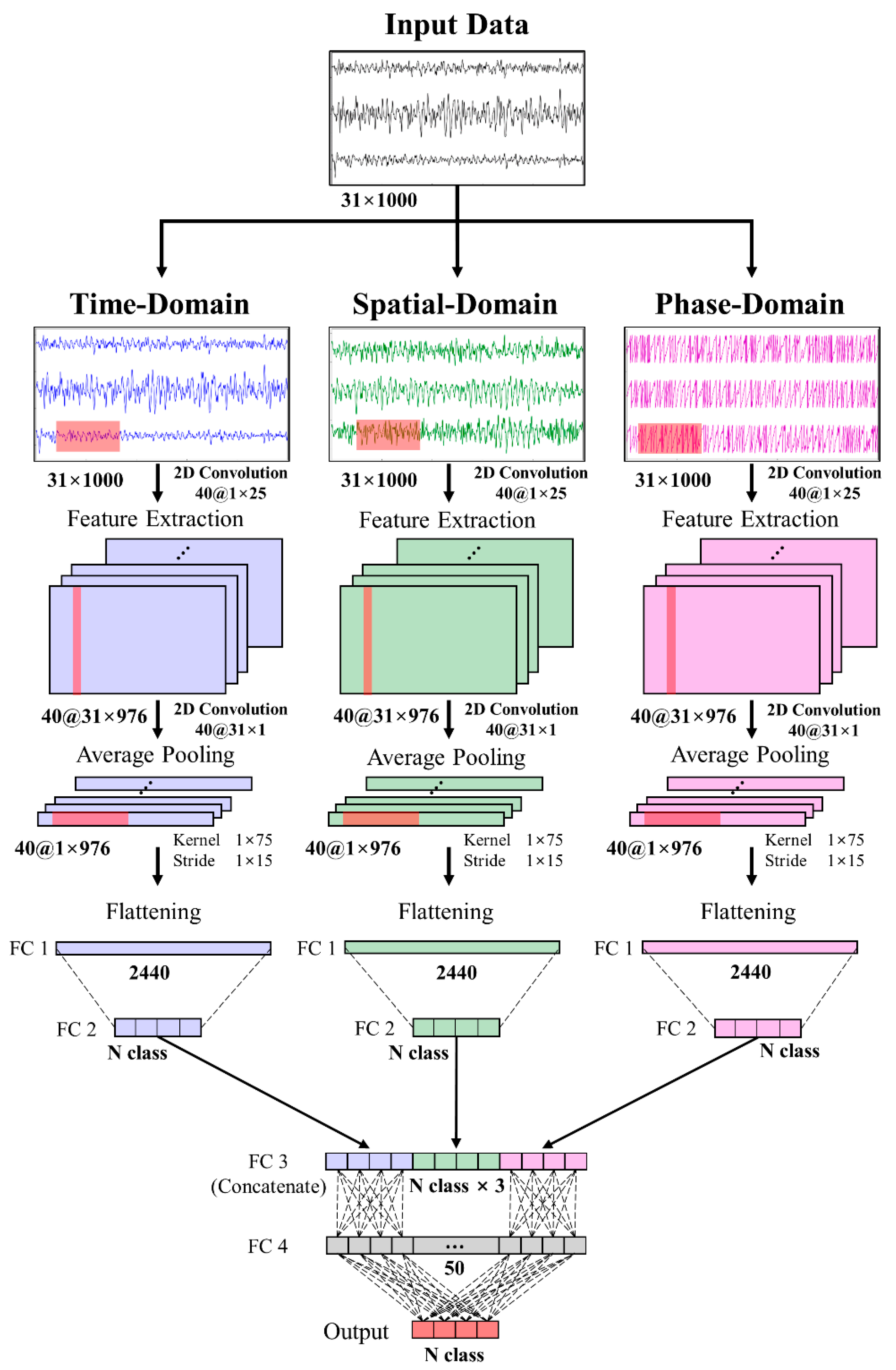
2.1. Multi-Domain CNN Model Architecture
2.2. Multi-Domain Input Preparation
2.2.1. Spatial-Domain Representation with a Common Spatial Pattern
2.2.2. Phase-Domain Representation with the Hilbert transform
2.3. Public Dataset
2.4. Experimental Dataset
2.4.1. Subjects
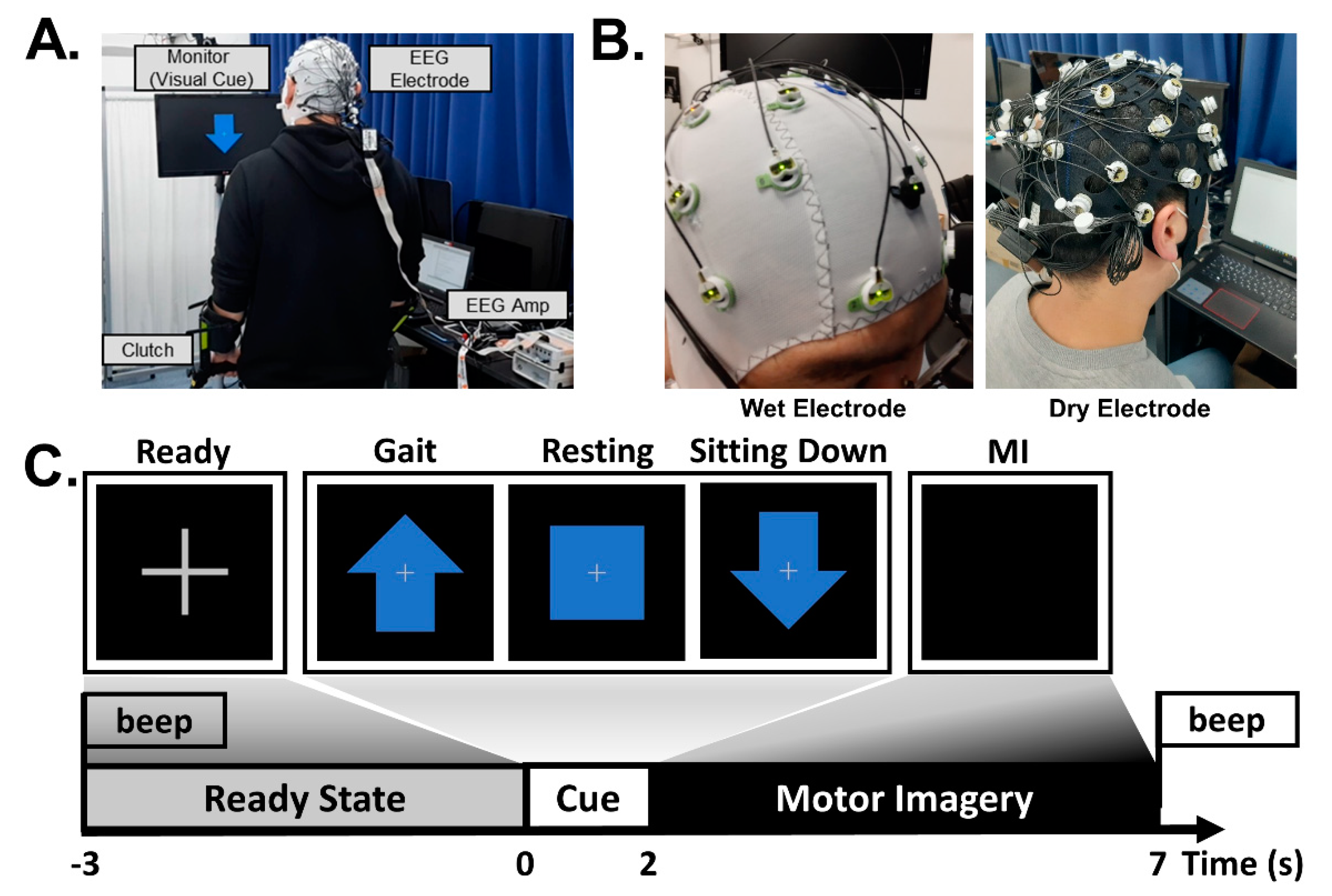
2.4.2. Experimental Setup
2.4.3. Data Acquisition
2.4.4. Signal Processing
3. Results
3.1. MD-CNN’s Classification Accuracy in Public Dataset
3.2. MD-CNN’s Classification Accuracy on the Experimental Dataset
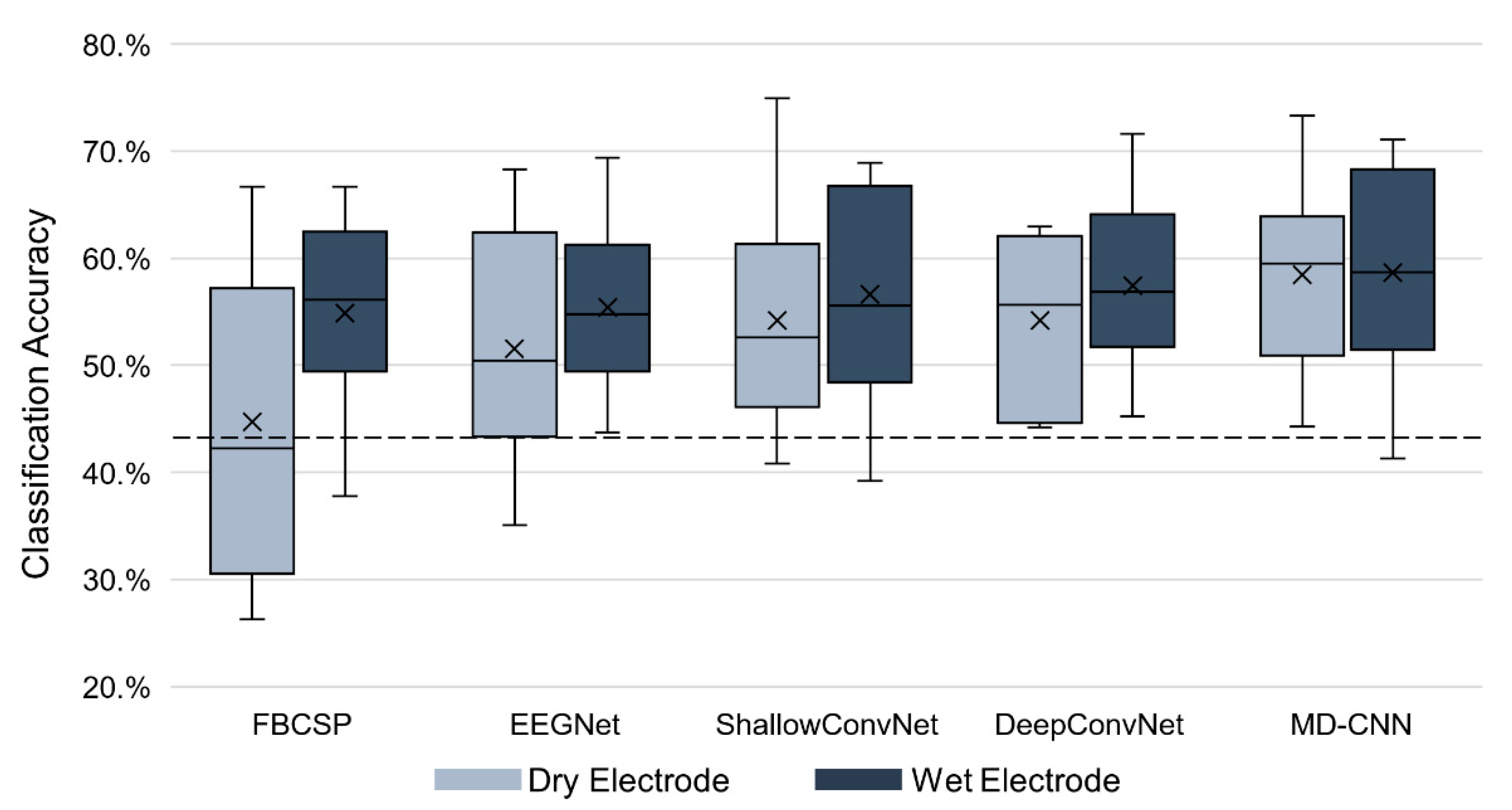
3.2.1. MD-CNN Model Evaluation in Dry–Wet Electrode BCI Experiments
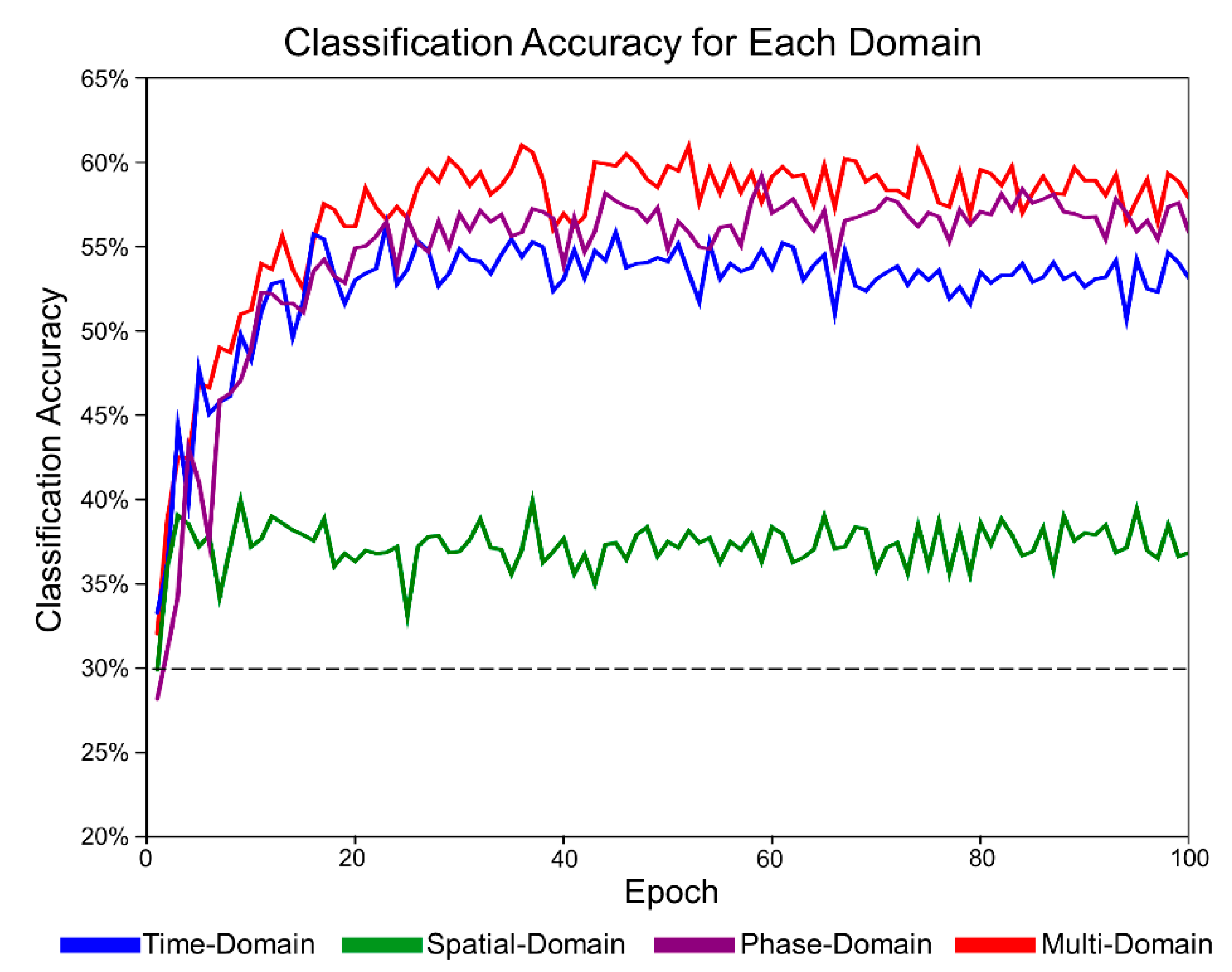
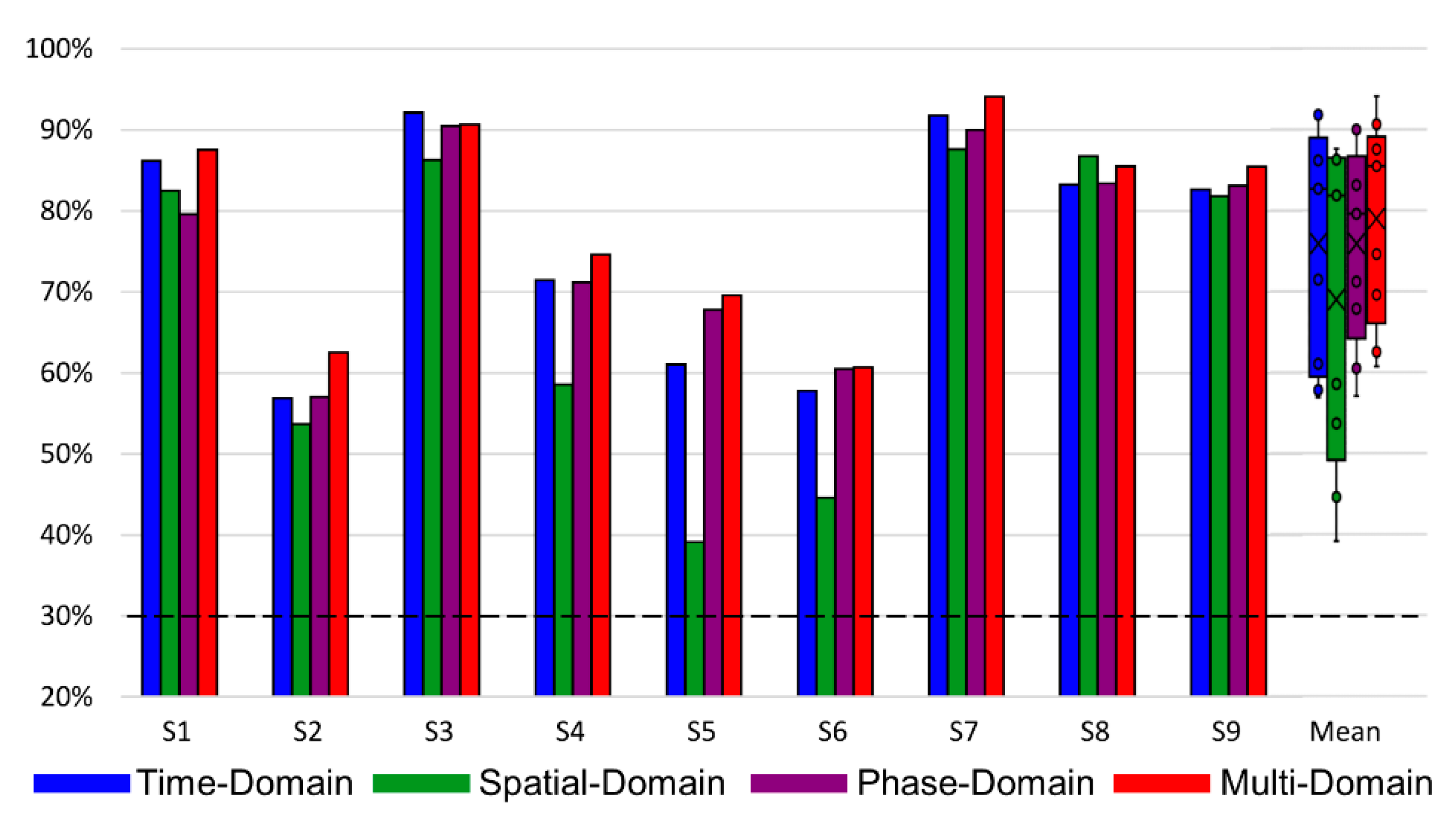
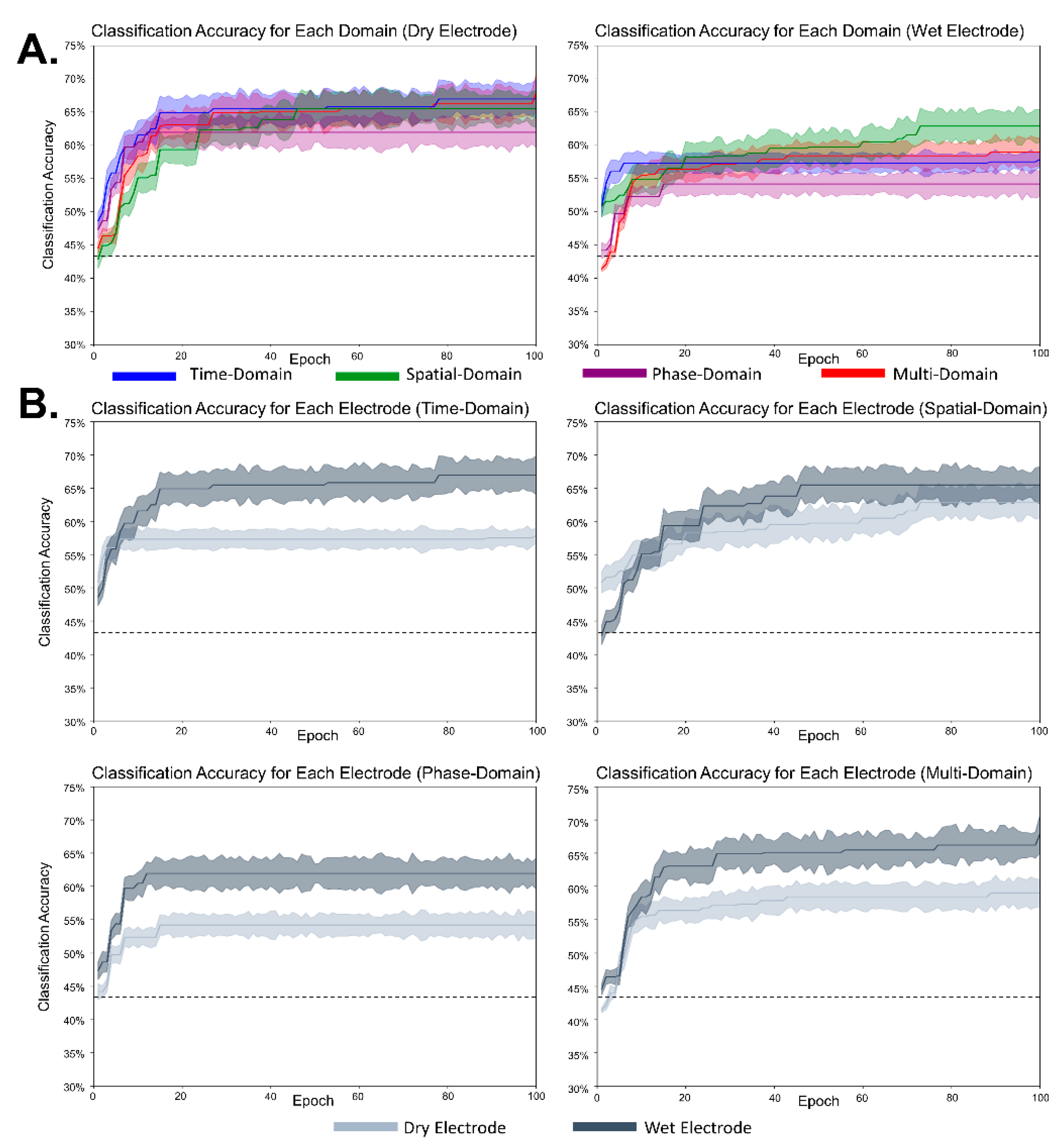
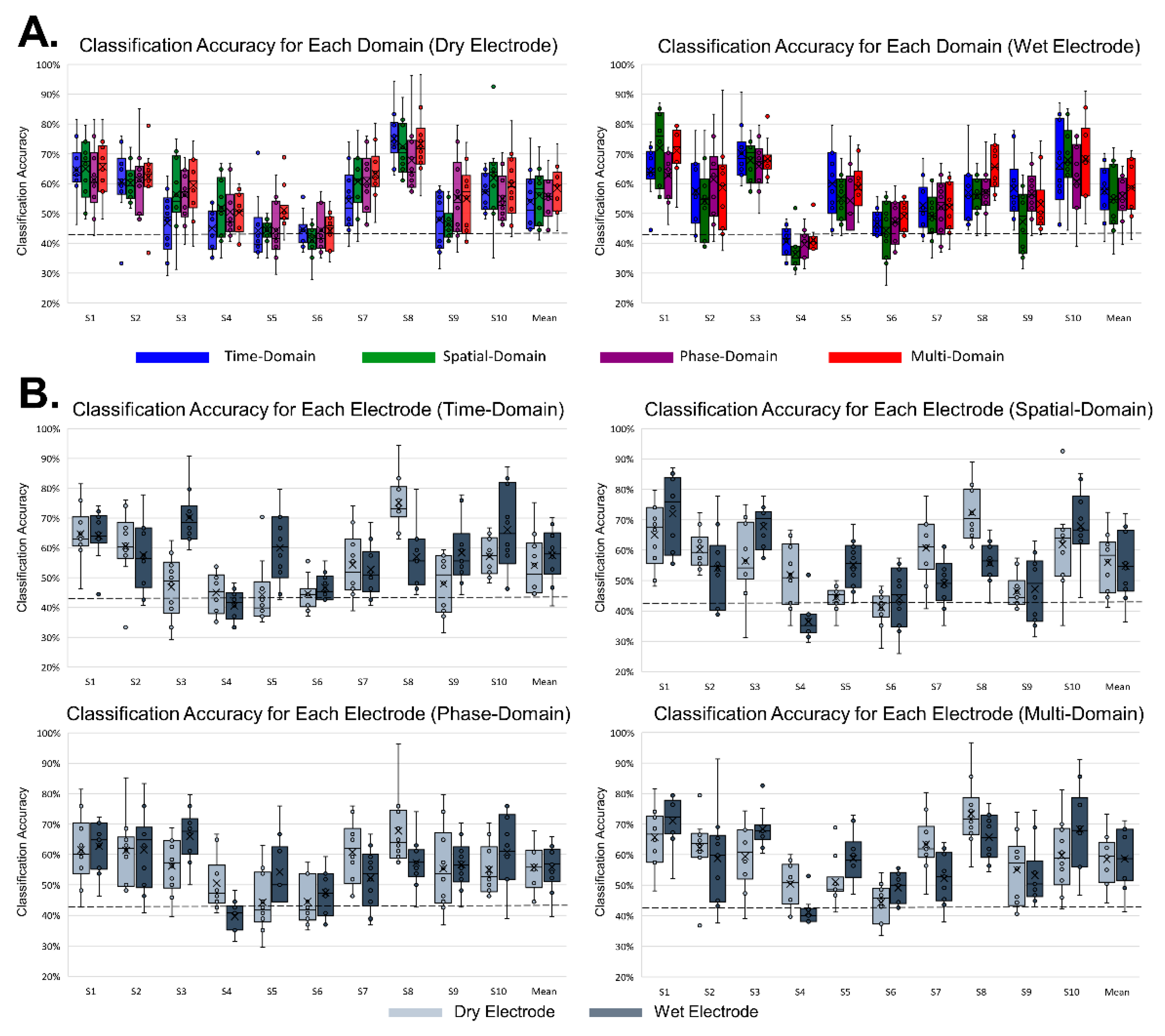
3.2.2. MD-CNN’s Domain-Specific Classification Accuracy
4. Discussion
4.1. Classification Performance of MD-CNN with the Public Dataset
4.2. Classification Performance of MD-CNN with Dry and Wet Electrode MI BCIs
4.3. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bozinovski, S.; Bozinovska, L. Brain-Computer Interface in Europe: The thirtieth anniversary. Automatika 2019, 60, 36–47. [Google Scholar] [CrossRef] [Green Version]
- Vidal, J.J. Toward Direct Brain-Computer Communication. Annu. Rev. Biophys. Bio. 1973, 2, 157–180. [Google Scholar] [CrossRef]
- Wolpaw, J.R.; Mcfarland, D.J.; Neat, G.W.; Forneris, C.A. An Eeg-Based Brain-Computer Interface for Cursor Control. Electroencephalogr. Clin. Neurophysiol. 1991, 78, 252–259. [Google Scholar] [CrossRef]
- Bronzino, J.D.; Peterson, D.R. Principles of electroencephalography. In Biomedical Engineering Fundamentals; CRC Press: Boca Raton, FL, USA, 2006; pp. 445–456. [Google Scholar]
- Montoya-Martinez, J.; Vanthornhout, J.; Bertrand, A.; Francart, T. Effect of number and placement of EEG electrodes on measurement of neural tracking of speech. PLoS ONE 2021, 16, e0246769. [Google Scholar] [CrossRef] [PubMed]
- Krigolson, O.E.; Williams, C.C.; Norton, A.; Hassall, C.D.; Colino, F.L. Choosing MUSE: Validation of a Low-Cost, Portable EEG System for ERP Research. Front. Neurosci. 2017, 11, 109. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schultz, T.L. Technical tips: MRI compatible EEG electrodes: Advantages, disadvantages, and financial feasibility in a clinical setting. Neurodiagn. J. 2012, 52, 69–81. [Google Scholar]
- Vespa, P.M.; Nenov, V.; Nuwer, M.R. Continuous EEG monitoring in the intensive care unit: Early findings and clinical efficacy. J. Clin. Neurophysiol. 1999, 16, 1–13. [Google Scholar] [CrossRef]
- Bozinovska, L.; Bozinovski, S.; Stojanov, G. Electroexpectogram: Experimental design and agorithms. In Proceedings of the the 1992 International Biomedical Engineering Days, İstanbul, Turkey, 18–20 August 1992; pp. 55–60. [Google Scholar]
- Sutton, S.; Braren, M.; Zubin, J.; John, E.R. Evoked-potential correlates of stimulus uncertainty. Science 1965, 150, 1187–1188. [Google Scholar] [CrossRef]
- Regan, D. Human Brain Electrophysiology: Evoked Potentials and Evoked Magnetic Fields in Science and Medicine; Elsevier: New York, NY, USA, 1989. [Google Scholar]
- Wang, Y.T.; Wang, Y.J.; Jung, T.P. A cell-phone-based brain-computer interface for communication in daily life. J. Neural Eng. 2011, 8, 025018. [Google Scholar] [CrossRef]
- Ahn, S.; Kim, K.; Jun, S.C. Steady-State Somatosensory Evoked Potential for Brain-Computer Interface-Present and Future. Front. Hum. Neurosci. 2015, 9, 716. [Google Scholar] [CrossRef] [Green Version]
- Snyder, A.Z. Steady-State Vibration Evoked-Potentials-Description of Technique and Characterization of Responses. Electroencephalogr. Clin. Neurophysiol. 1992, 84, 257–268. [Google Scholar] [CrossRef]
- Choi, J.; Kim, K.T.; Jeong, J.H.; Kim, L.; Lee, S.J.; Kim, H. Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton. Sensors 2020, 20, 7309. [Google Scholar] [CrossRef]
- Do, A.H.; Wang, P.T.; King, C.E.; Chun, S.N.; Nenadic, Z. Brain-computer interface controlled robotic gait orthosis. J. Neuroeng. Rehabil. 2013, 10, 111. [Google Scholar] [CrossRef] [Green Version]
- Pfurtscheller, G.; Neuper, C. Motor imagery and direct brain-computer communication. Proc. IEEE 2001, 89, 1123–1134. [Google Scholar] [CrossRef]
- Taheri, B.A.; Knight, R.T.; Smith, R.L. A dry electrode for EEG recording. Electroencephalogr. Clin. Neurophysiol. 1994, 90, 376–383. [Google Scholar] [CrossRef] [Green Version]
- Thakor, N.V. Biopotentials and Electrophysiology Measurement; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Di Flumeri, G.; Arico, P.; Borghini, G.; Sciaraffa, N.; Di Florio, A.; Babiloni, F. The Dry Revolution: Evaluation of Three Different EEG Dry Electrode Types in Terms of Signal Spectral Features, Mental States Classification and Usability. Sensors 2019, 19, 1365. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ferree, T.C.; Luu, P.; Russell, G.S.; Tucker, D.M. Scalp electrode impedance, infection risk, and EEG data quality. Clin. Neurophysiol. 2001, 112, 536–544. [Google Scholar] [CrossRef]
- Nunez, P.L.; Srinivasan, R. Electric Fields of the Brain: The Neurophysics of EEG; Oxford University Press: New York, NY, USA, 2006. [Google Scholar]
- Wang, F.; Li, G.L.; Chen, J.J.; Duan, Y.W.; Zhang, D. Novel semi-dry electrodes for brain-computer interface applications. J. Neural Eng. 2016, 13, 046021. [Google Scholar] [CrossRef] [PubMed]
- Shu, L.; Xie, J.Y.; Yang, M.Y.; Li, Z.Y.; Li, Z.Q.; Liao, D.; Xu, X.M.; Yang, X.Y. A Review of Emotion Recognition Using Physiological Signals. Sensors 2018, 18, 2074. [Google Scholar] [CrossRef] [Green Version]
- Domingos, I.; Deligianni, F.; Yang, G. Dry Versus Wet EEG Electrode Systems in Motor Imagery Classification. In Proceedings of the UK RAS Conference: Robotics Working For and Among US, Bristol, UK, 12 December 2017; pp. 74–76. [Google Scholar]
- Kojoma, Y.; Washizawa, Y. Restoration of dry electrode EEG using deep convolutional neural network. In Proceedings of the Asiapac Sign Info Pr, Honolulu, HI, USA, 12–15 November 2018; pp. 834–837. [Google Scholar]
- Lopez-Gordo, M.A.; Sanchez-Morillo, D.; Valle, F.P. Dry EEG Electrodes. Sensors 2014, 14, 12847–12870. [Google Scholar] [CrossRef]
- Hua, H.Q.; Tang, W.; Xu, X.M.; Feng, D.D.; Shu, L. Flexible Multi-Layer Semi-Dry Electrode for Scalp EEG Measurements at Hairy Sites. Micromachines 2019, 10, 518. [Google Scholar] [CrossRef] [Green Version]
- Slipher, G.A.; Hairston, W.D.; Bradford, J.C.; Bain, E.D.; Mrozek, R.A. Carbon nanofiber-filled conductive silicone elastomers as soft, dry bioelectronic interfaces. PLoS ONE 2018, 13, e0189415. [Google Scholar] [CrossRef]
- Mathewson, K.E.; Harrison, T.J.L.; Kizuk, S.A.D. High and dry? Comparing active dry EEG electrodes to active and passive wet electrodes. Psychophysiology 2017, 54, 74–82. [Google Scholar] [CrossRef]
- Grummett, T.S.; Leibbrandt, R.E.; Lewis, T.W.; DeLosAngeles, D.; Powers, D.M.W.; Willoughby, J.O.; Pope, K.J.; Fitzgibbon, S.P. Measurement of neural signals from inexpensive, wireless and dry EEG systems. Physiol. Meas. 2015, 36, 1469–1484. [Google Scholar] [CrossRef]
- Guger, C.; Krausz, G.; Edlinger, G. Brain-computer interface control with dry EEG electrodes. In Proceedings of the 5th Int. Brain–Computer Interface Conference, Graz, Austria, 22–24 September 2011; pp. 316–319. [Google Scholar]
- Kim, K.T.; Lee, J.; Kim, H.; Kim, C.H.; Lee, S.J. Classification of Selective Attention Within Steady-State Somatosensory Evoked Potentials From Dry Electrodes Using Mutual Information-Based Spatio-Spectral Feature Selection. IEEE Access 2020, 8, 85464–85472. [Google Scholar] [CrossRef]
- Xing, X.; Wang, Y.J.; Pei, W.H.; Guo, X.H.; Liu, Z.D.; Wang, F.; Ming, G.; Zhao, H.Z.; Gui, Q.; Chen, H.D. A High-Speed SSVEP-Based BCI Using Dry EEG Electrodes. Sci. Rep. 2018, 8, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep Learning With Convolutional Neural Networks for EEG Decoding and Visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef] [Green Version]
- Dai, G.H.; Zhou, J.; Huang, J.H.; Wang, N. HS-CNN: A CNN with hybrid convolution scale for EEG motor imagery classification. J. Neural Eng. 2020, 17, 016025. [Google Scholar] [CrossRef] [PubMed]
- Kwon, O.Y.; Lee, M.H.; Guan, C.T.; Lee, S.W. Subject-Independent Brain-Computer Interfaces Based on Deep Convolutional Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3839–3852. [Google Scholar] [CrossRef] [PubMed]
- Mane, R.; Robinson, N.; Vinod, A.P.; Lee, S.W.; Guan, C.T. A Multi-view CNN with Novel Variance Layer for Motor Imagery Brain Computer Interface. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 2950–2953. [Google Scholar]
- Jeong, J.H.; Kim, D.-J.; Kim, H. Hybrid Zero-Training BCI based on Convolutional Neural Network for Lower-limb Motor-Imagery. In Proceedings of the 2021 9th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Korea, 22–24 February 2021; pp. 1–4. [Google Scholar]
- Brunner, C.; Leeb, R.; Müller-Putz, G.; Schlögl, A.; Pfurtscheller, G. BCI Competition 2008—Graz Data Set A; Institute for Knowledge Discovery (Laboratory of Brain-Computer Interfaces), Graz University of Technology: Graz, Austria, 2008; p. 16. [Google Scholar]
- Ramoser, H.; Muller-Gerking, J.; Pfurtscheller, G. Optimal spatial filtering of single trial EEG during imagined hand movement. IEEE Trans. Rehabil. Eng. 2000, 8, 441–446. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grosse-Wentrup, M.; Buss, M. Multiclass common spatial patterns and information theoretic feature extraction. IEEE Trans. Biomed. Eng. 2008, 55, 1991–2000. [Google Scholar] [CrossRef]
- Wang, Y.J.; Hong, B.; Gao, X.R.; Gao, S.K. Phase synchrony measurement in motor cortex for classifying single-trial EEG during motor imagery. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 75–78. [Google Scholar]
- Lashgari, E.; Liang, D.H.; Maoz, U. Data augmentation for deep-learning-based electroencephalography. J. Neurosci. Methods 2020, 346, 108885. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Hinton, G.E.; Srivastava, N.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R.R. Improving neural networks by preventing co-adaptation of feature detectors. arXiv 2012, arXiv:1207.0580. [Google Scholar]
- Kak, S.C. Discrete Hilbert Transform. PR Inst. Electr. Elect. 1970, 58, 585–586. [Google Scholar] [CrossRef]
- Grezes, J.; Decety, J. Functional anatomy of execution, mental simulation, observation, and verb generation of actions: A meta-analysis. Hum. Brain Mapp. 2001, 12, 1–19. [Google Scholar] [CrossRef]
- Jeong, J.H.; Shim, K.H.; Kim, D.J.; Lee, S.W. Brain-Controlled Robotic Arm System Based on Multi-Directional CNN-BiLSTM Network Using EEG Signals. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1226–1238. [Google Scholar] [CrossRef]
- Ahn, M.; Cho, H.; Ahn, S.; Jun, S.C. High Theta and Low Alpha Powers May Be Indicative of BCI-Illiteracy in Motor Imagery. PLoS ONE 2013, 8, e80886. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Yoon, J.G.; Lee, S.W. Predicting Motor Imagery Performance From Resting-State EEG Using Dynamic Causal Modeling. Front. Hum. Neurosci. 2020, 14, 321. [Google Scholar] [CrossRef]
- Ang, K.K.; Chin, Z.Y.; Wang, C.C.; Guan, C.T.; Zhang, H.H. Filter bank common spatial pattern algorithm on BCI competition IV Datasets 2a and 2b. Front. Neurosci. 2012, 6, 39. [Google Scholar] [CrossRef] [Green Version]
- Lawhern, V.J.; Solon, A.J.; Waytowich, N.R.; Gordon, S.M.; Hung, C.P.; Lance, B.J. EEGNet: A compact convolutional neural network for EEG-based brain-computer interfaces. J. Neural Eng. 2018, 15, 056013. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Müller-Putz, G.; Scherer, R.; Brunner, C.; Leeb, R.; Pfurtscheller, G. Better than random: A closer look on BCI results. Int. J. Bioelectromagn. 2008, 10, 52–55. [Google Scholar]
- Amin, S.U.; Alsulaiman, M.; Muhammad, G.; Mekhtiche, M.A.; Hossain, M.S. Deep Learning for EEG motor imagery classification based on multi-layer CNNs feature fusion. Future Gener. Comp. Syst. 2019, 101, 542–554. [Google Scholar] [CrossRef]
- Sakhavi, S.; Guan, C.T.; Yan, S.C. Learning Temporal Information for Brain-Computer Interface Using Convolutional Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5619–5629. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wu, D.R. On the Vulnerability of CNN Classifiers in EEG-Based BCIs. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 814–825. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Ang, K.K.; Phua, K.S.; Yu, J.; Toh, V.; Ng, W.H.; So, R.Q. EEG Channel Selection Based on Correlation Coefficient for Motor Imagery Classification: A Study on Healthy Subjects and ALS Patient. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 1996–1999. [Google Scholar]
- Lee, S.B.; Kim, H.J.; Kim, H.; Jeong, J.H.; Lee, S.W.; Kim, D.J. Comparative analysis of features extracted from EEG spatial, spectral and temporal domains for binary and multiclass motor imagery classification. Inf. Sci. 2019, 502, 190–200. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; L. Erlbaum Associates: New York, NY, USA, 1988. [Google Scholar]
- Lakens, D. Calculating and reporting effect sizes to facilitate cumulative science: A practical primer for t-tests and ANOVAs. Front. Psychol. 2013, 4, 863. [Google Scholar] [CrossRef] [Green Version]
- Wierzgala, P.; Zapala, D.; Wojcik, G.M.; Masiak, J. Most Popular Signal Processing Methods in Motor-Imagery BCI: A Review and Meta-Analysis. Front. Neuroinform. 2018, 12, 78. [Google Scholar] [CrossRef] [Green Version]
- Thomas, E.; Dyson, M.; Clerc, M. An analysis of performance evaluation for motor-imagery based BCI. J. Neural Eng. 2013, 10, 31001. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | FBCSP | EEGNet | Shallow ConvNet | Deep ConvNet | MD-CNN |
|---|---|---|---|---|---|
| S1 | 78.47 | 76.10 | 84.61 | 77.43 | 87.56 |
| S2 | 53.53 | 47.97 | 53.94 | 49.42 | 62.50 |
| S3 | 83.80 | 91.61 | 90.74 | 87.15 | 90.63 |
| S4 | 60.59 | 51.91 | 65.80 | 51.04 | 74.59 |
| S5 | 60.19 | 56.77 | 53.82 | 60.24 | 69.56 |
| S6 | 47.74 | 51.04 | 52.03 | 51.74 | 60.71 |
| S7 | 90.57 | 71.12 | 88.66 | 74.94 | 94.10 |
| S8 | 70.49 | 77.84 | 82.81 | 76.04 | 85.53 |
| S9 | 65.74 | 81.54 | 82.18 | 77.26 | 85.47 |
| mean (s.d.) | 67.90 (14.21) | 67.32 (15.74) | 72.73 (16.19) | 67.25 (14.17) | 78.96 (12.43) |
| Classifier | Dry Mean (s.d.) | Wet Mean (s.d.) | p-Value | Effect Size Cohen’s d |
|---|---|---|---|---|
| FBCSP | 44.74 (14.26) | 54.89 (9.37) | 0.10 | 0.5816 |
| EEGNet | 51.57 (10.70) | 55.44 (8.03) | 0.22 | 0.4132 |
| ShallowConvNet | 54.17 (10.66) | 56.66 (10.13) | 0.54 | 0.1940 |
| DeepConvNet | 54.20 (7.85) | 57.46 (8.22) | 0.09 | 0.6044 |
| MD-CNN | 58.44 (9.76) | 58.66 (9.76) | 0.93 | 0.0292 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, J.-H.; Choi, J.-H.; Kim, K.-T.; Lee, S.-J.; Kim, D.-J.; Kim, H.-M. Multi-Domain Convolutional Neural Networks for Lower-Limb Motor Imagery Using Dry vs. Wet Electrodes. Sensors 2021, 21, 6672. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196672
Jeong J-H, Choi J-H, Kim K-T, Lee S-J, Kim D-J, Kim H-M. Multi-Domain Convolutional Neural Networks for Lower-Limb Motor Imagery Using Dry vs. Wet Electrodes. Sensors. 2021; 21(19):6672. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196672
Chicago/Turabian StyleJeong, Ji-Hyeok, Jun-Hyuk Choi, Keun-Tae Kim, Song-Joo Lee, Dong-Joo Kim, and Hyung-Min Kim. 2021. "Multi-Domain Convolutional Neural Networks for Lower-Limb Motor Imagery Using Dry vs. Wet Electrodes" Sensors 21, no. 19: 6672. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196672