
Ultra-High Resolution Imaging Method for Distributed Small Satellite Spotlight MIMO-SAR Based on Sub-Aperture Image Fusion


Abstract
:1. Introduction
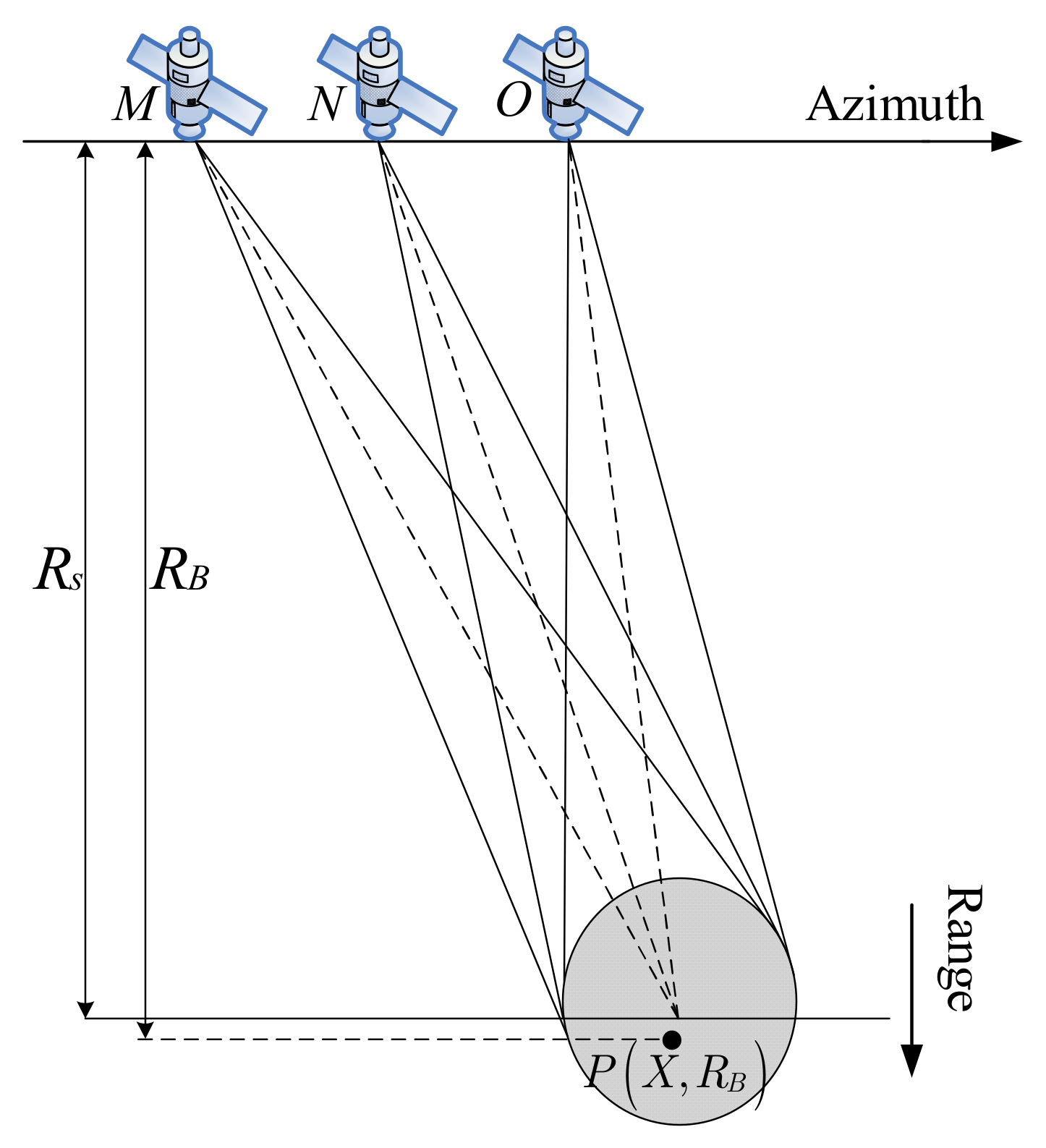
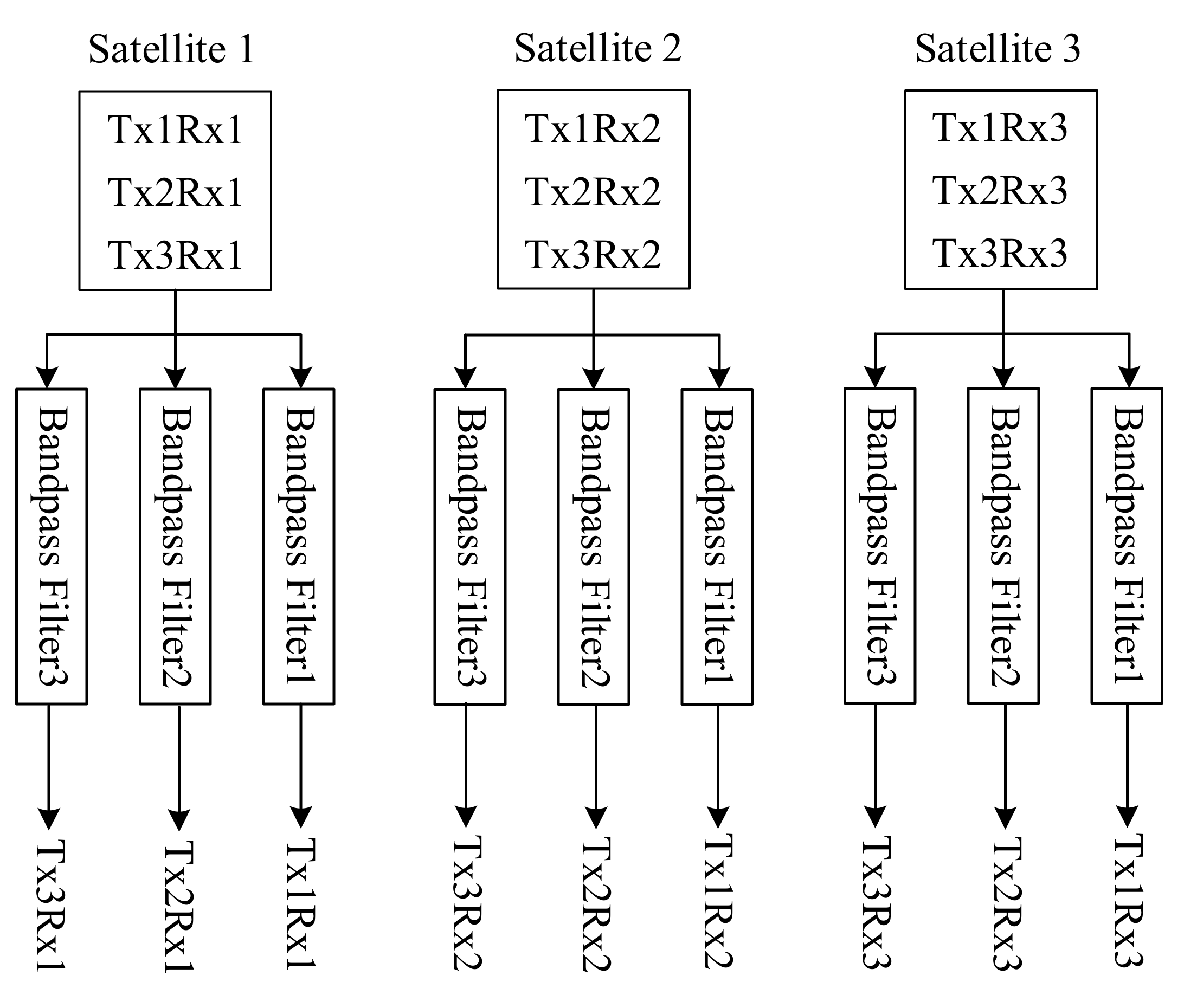
2. Working Mode and Signal Model of Distributed Small Satellite Spotlight MIMO-SAR
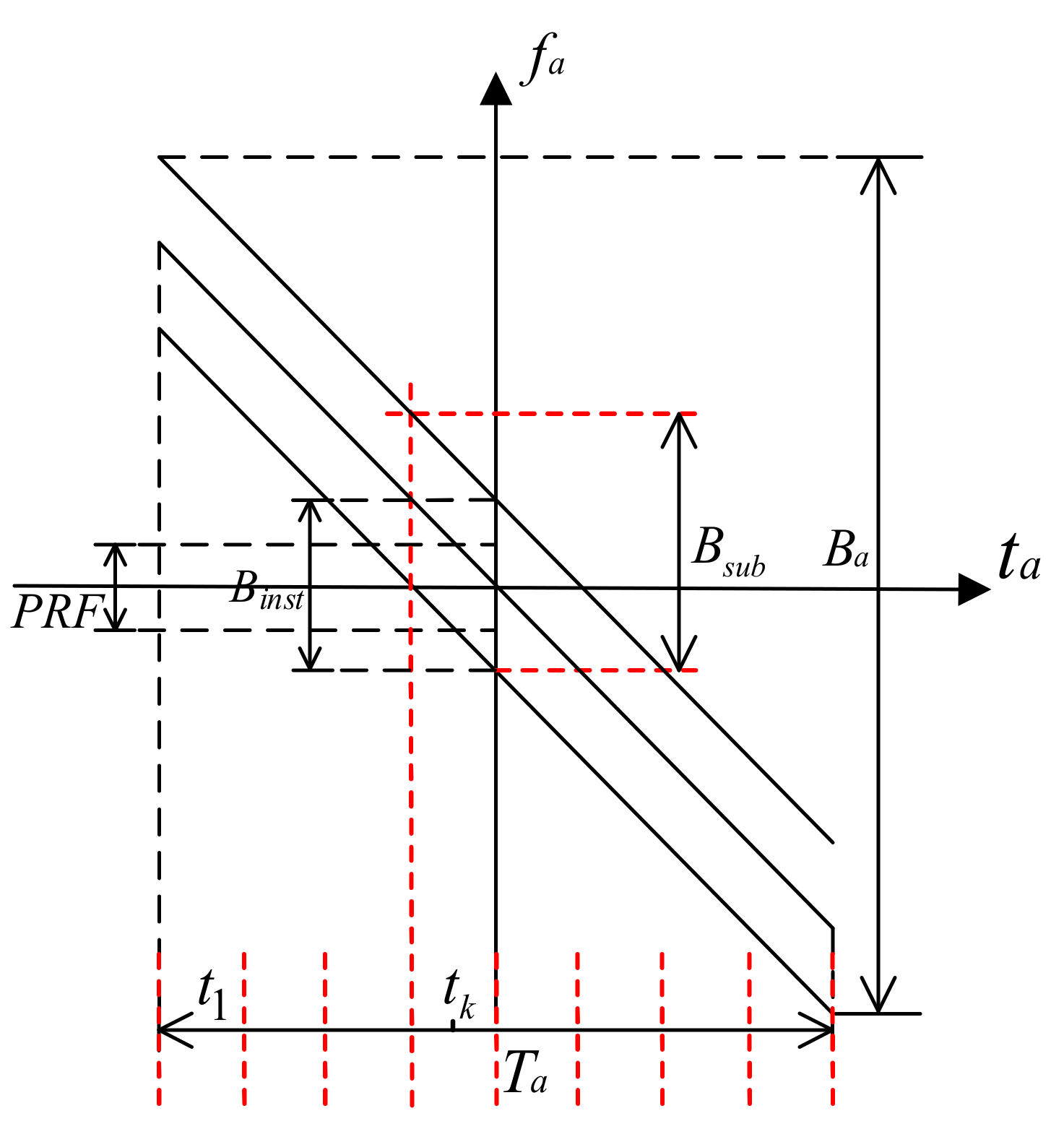
3. Analysis of Doppler Characteristics
4. Signal Processing Flow
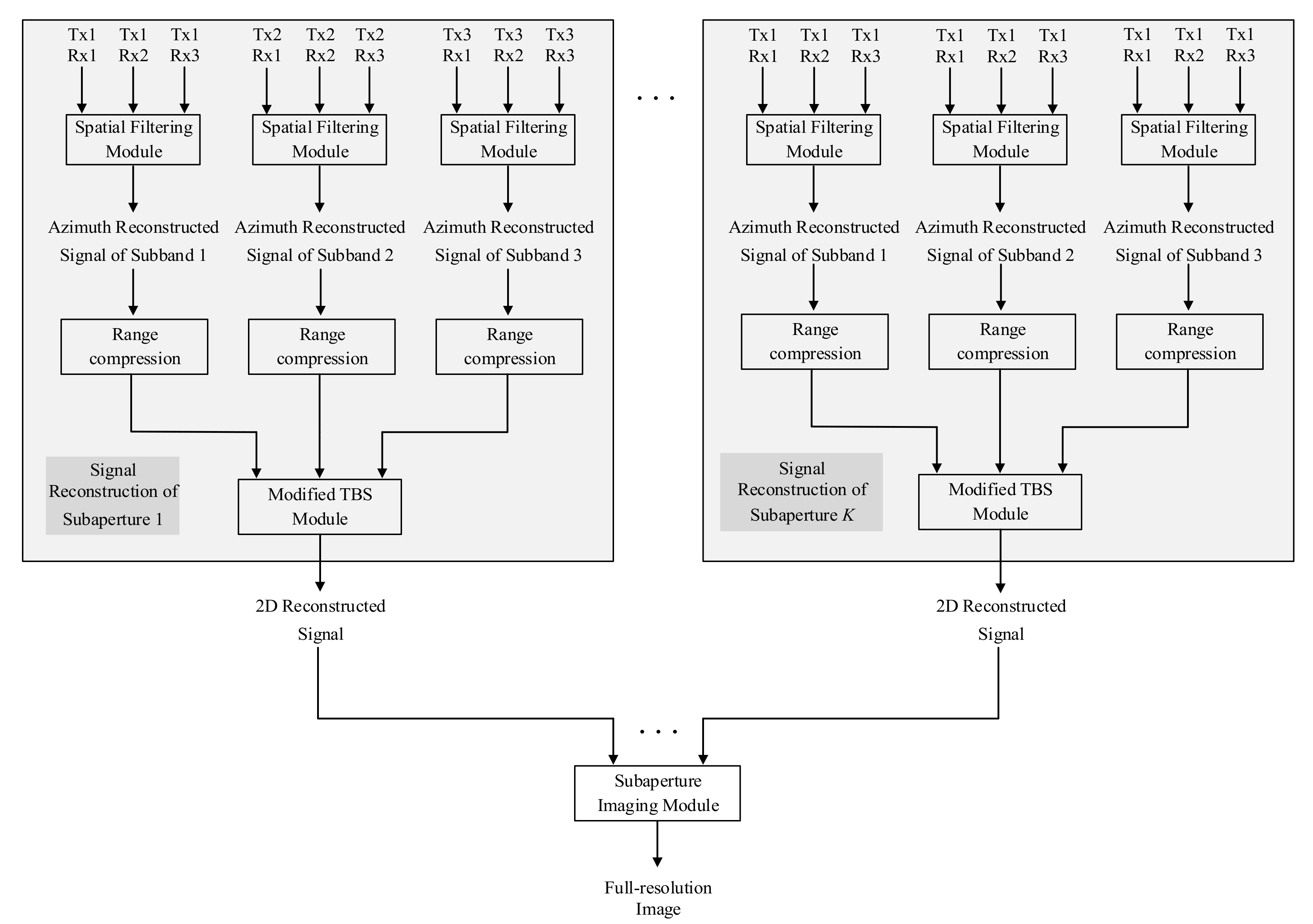
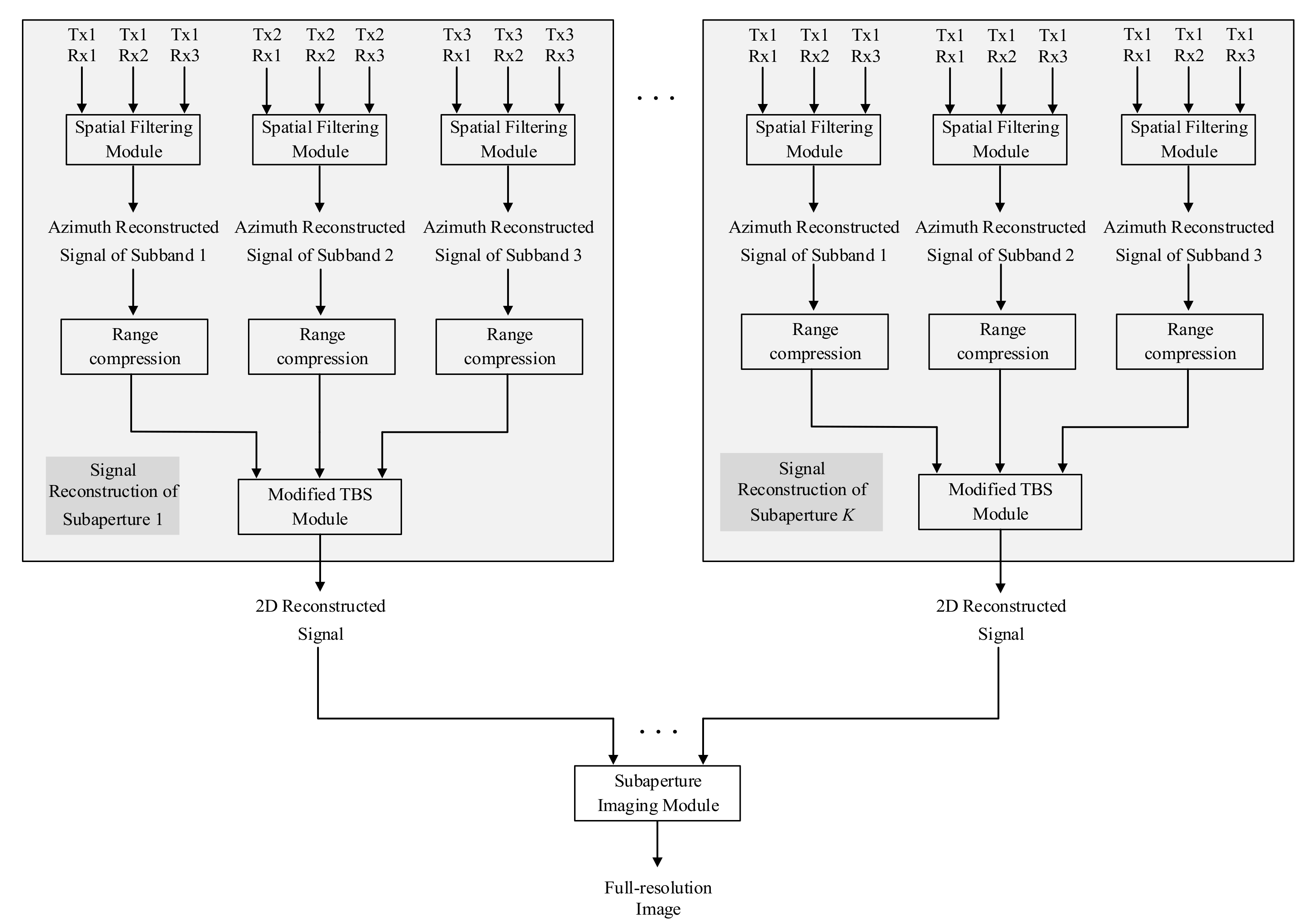
4.1. Azimuth Deblurring Processing Based on Spatial Filtering
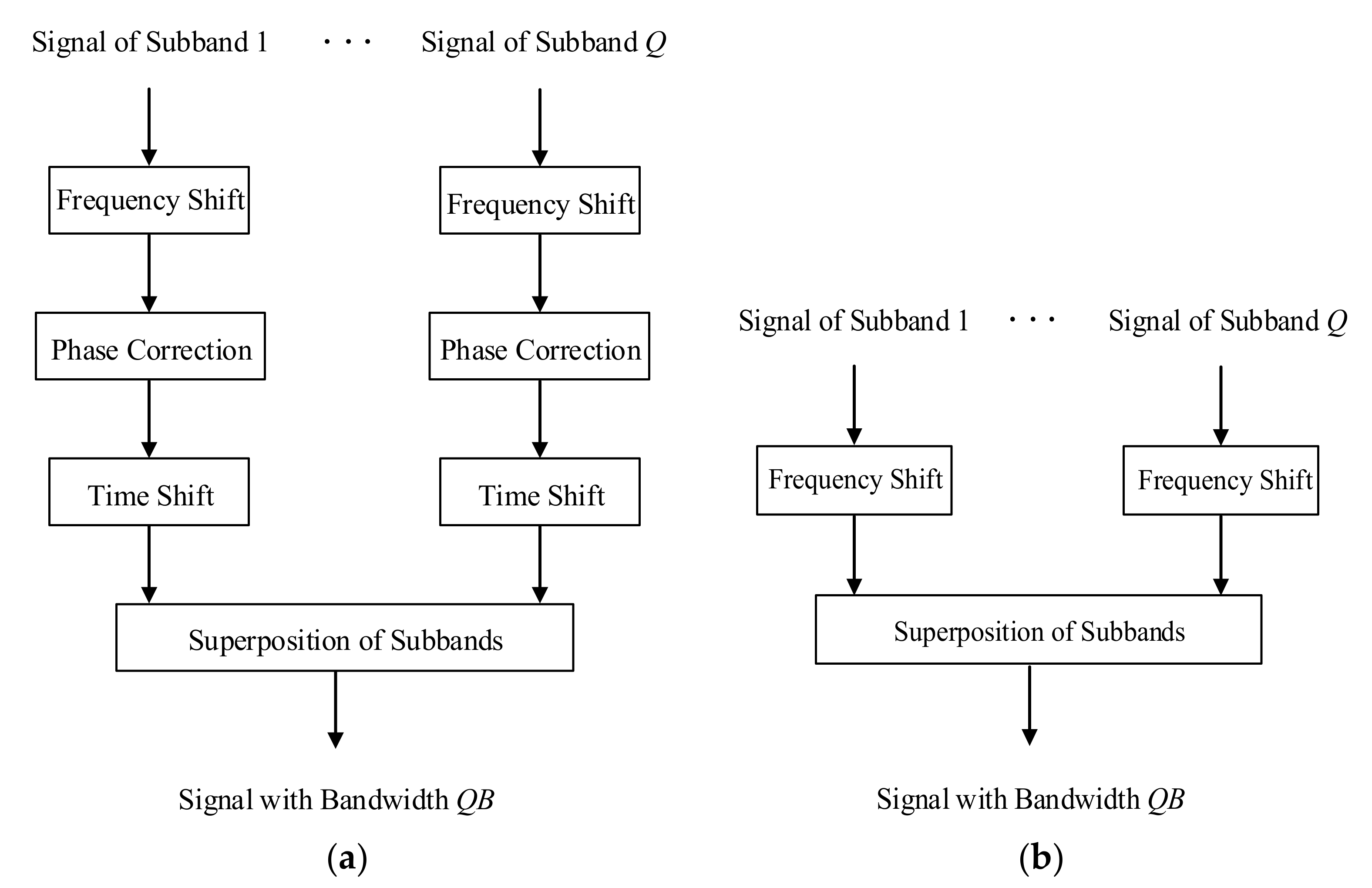
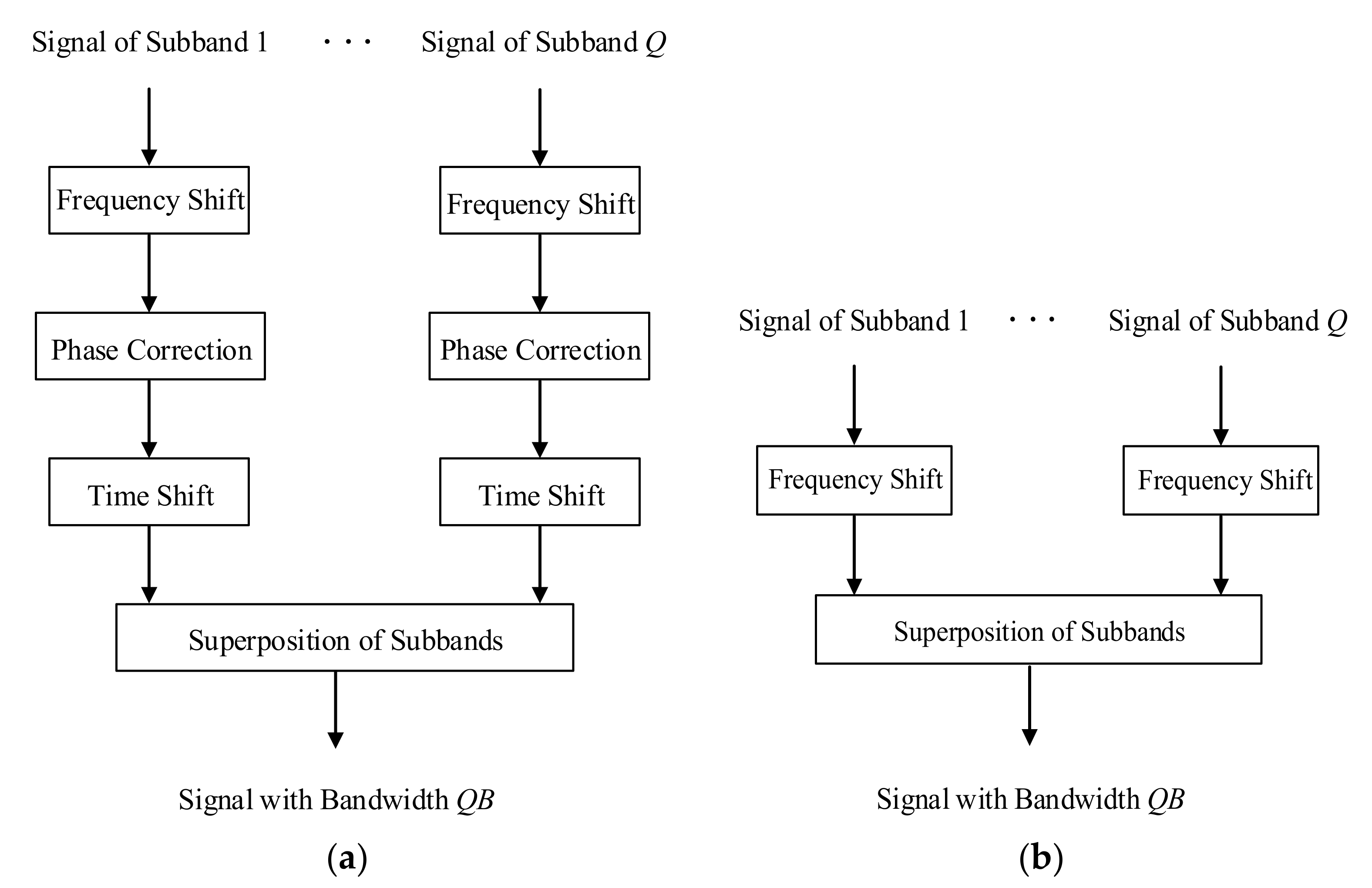
4.2. Improved TBS Method
4.3. Imaging Algorithm Based on Sub-Aperture Image Fusion
4.3.1. Two-Dimensional Focusing Processing Based on CS-Dechirp
4.3.2. Coherent Fusion of Sub-Aperture Complex Images
5. Simulation Experiment and Result Analysis
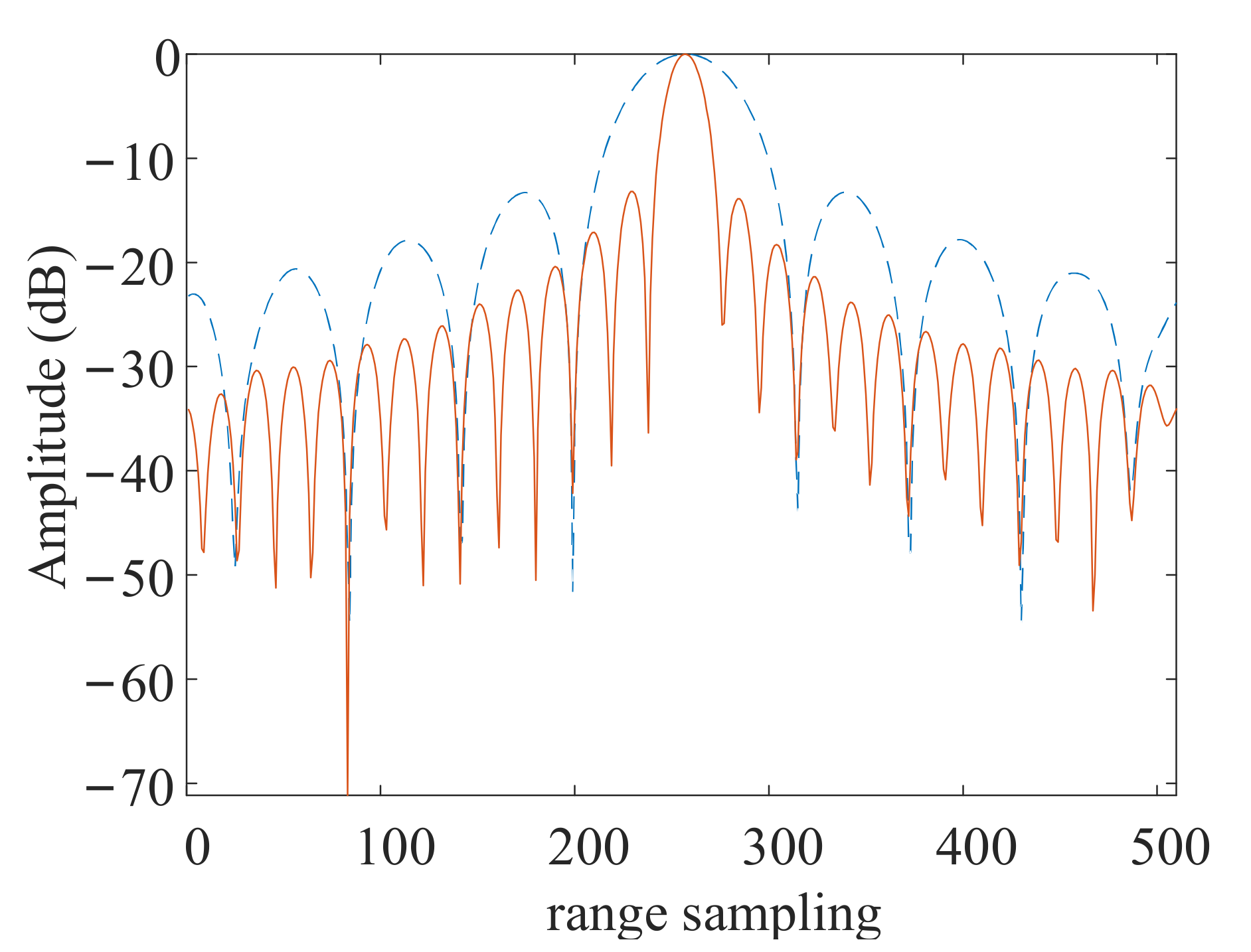
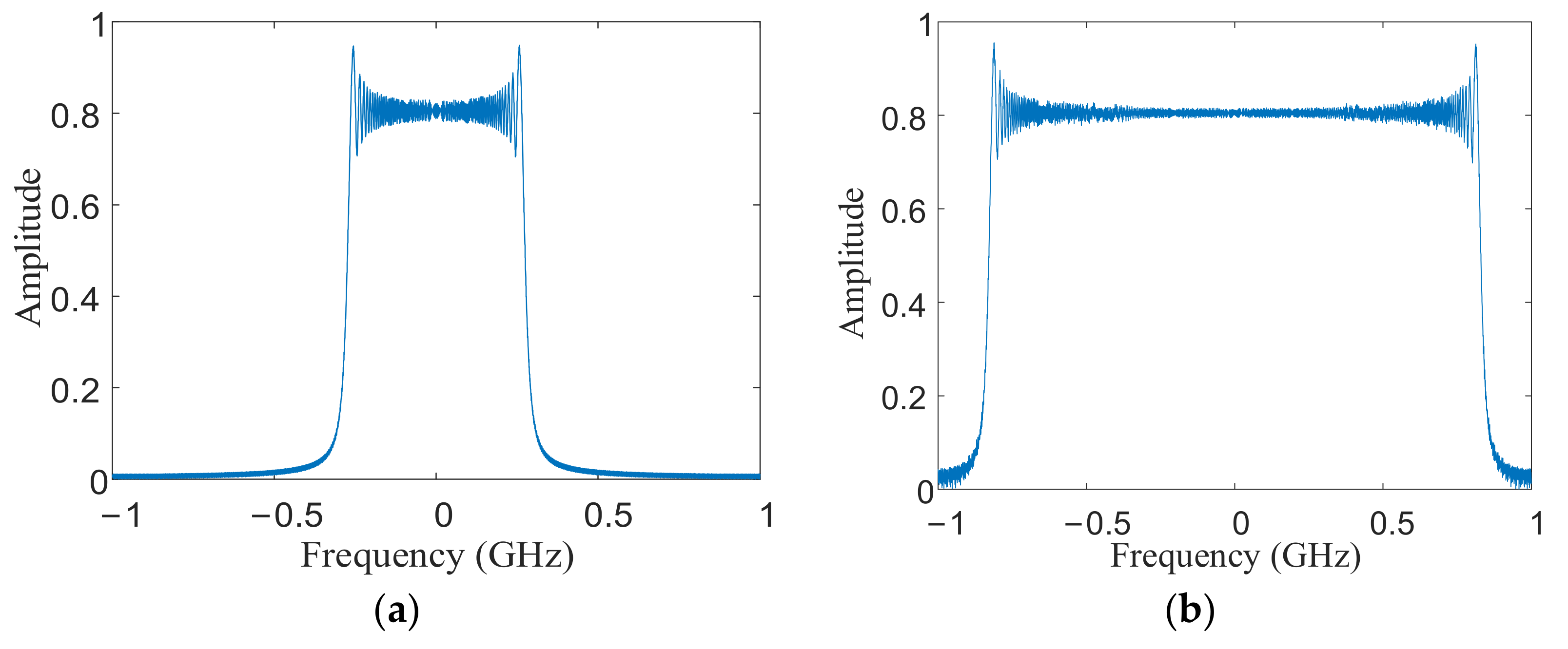
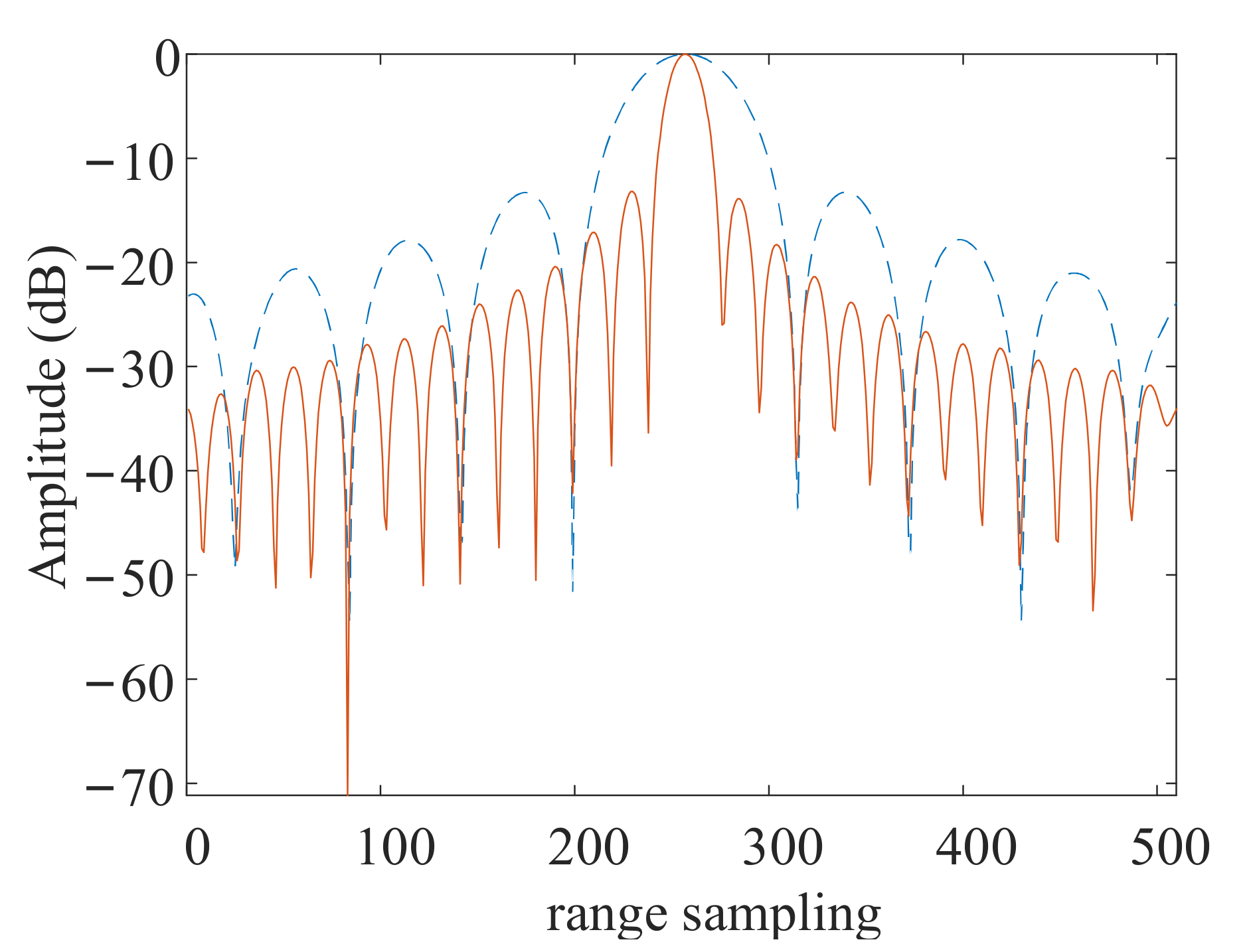
5.1. Bandwidth Synthesis Experiment
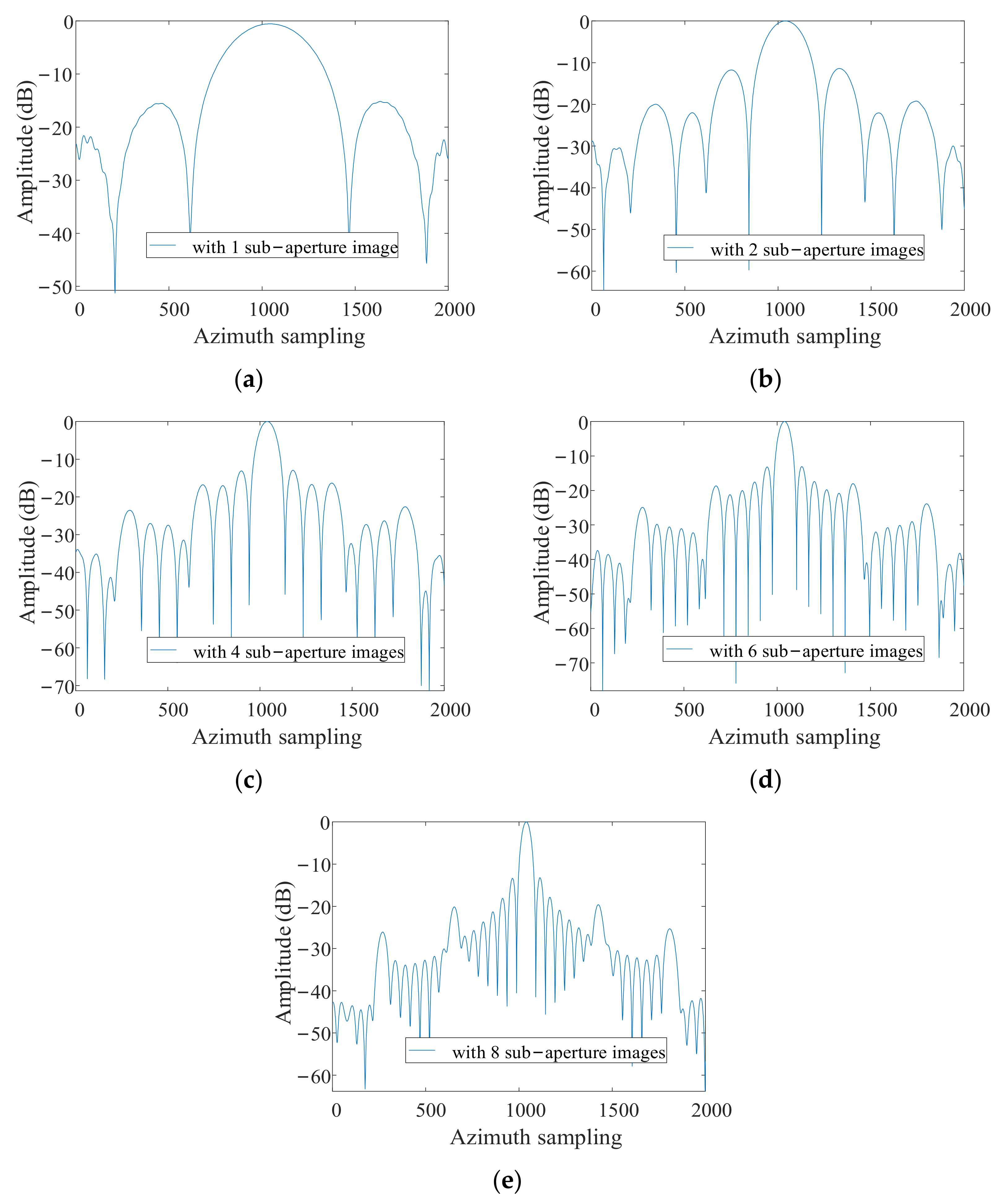
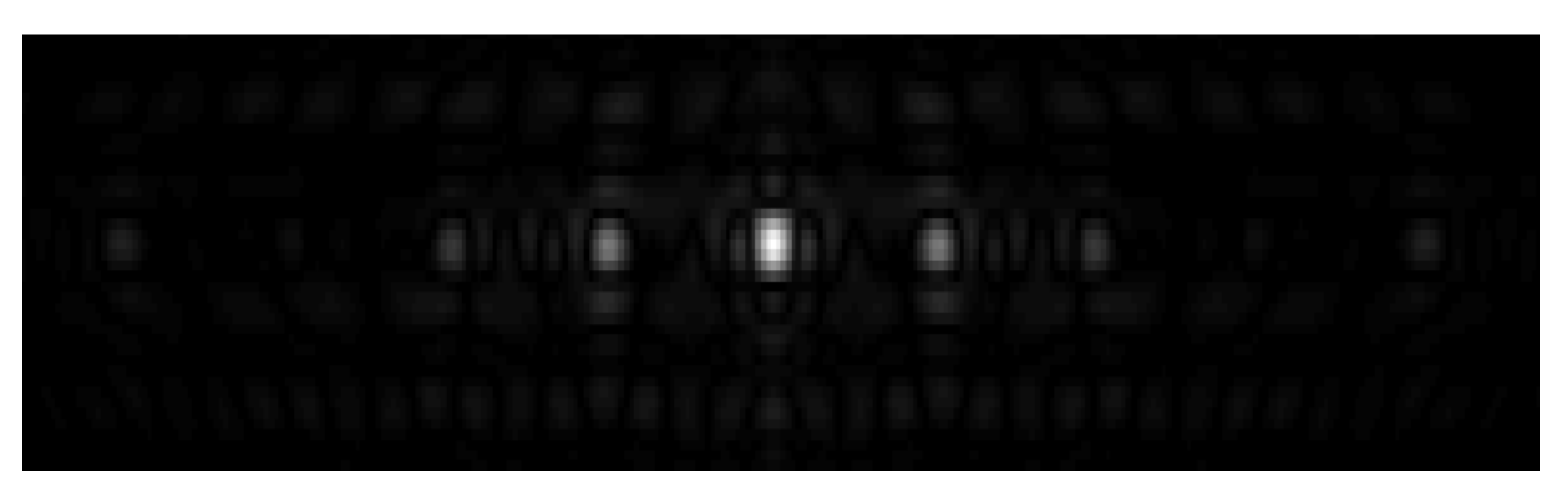
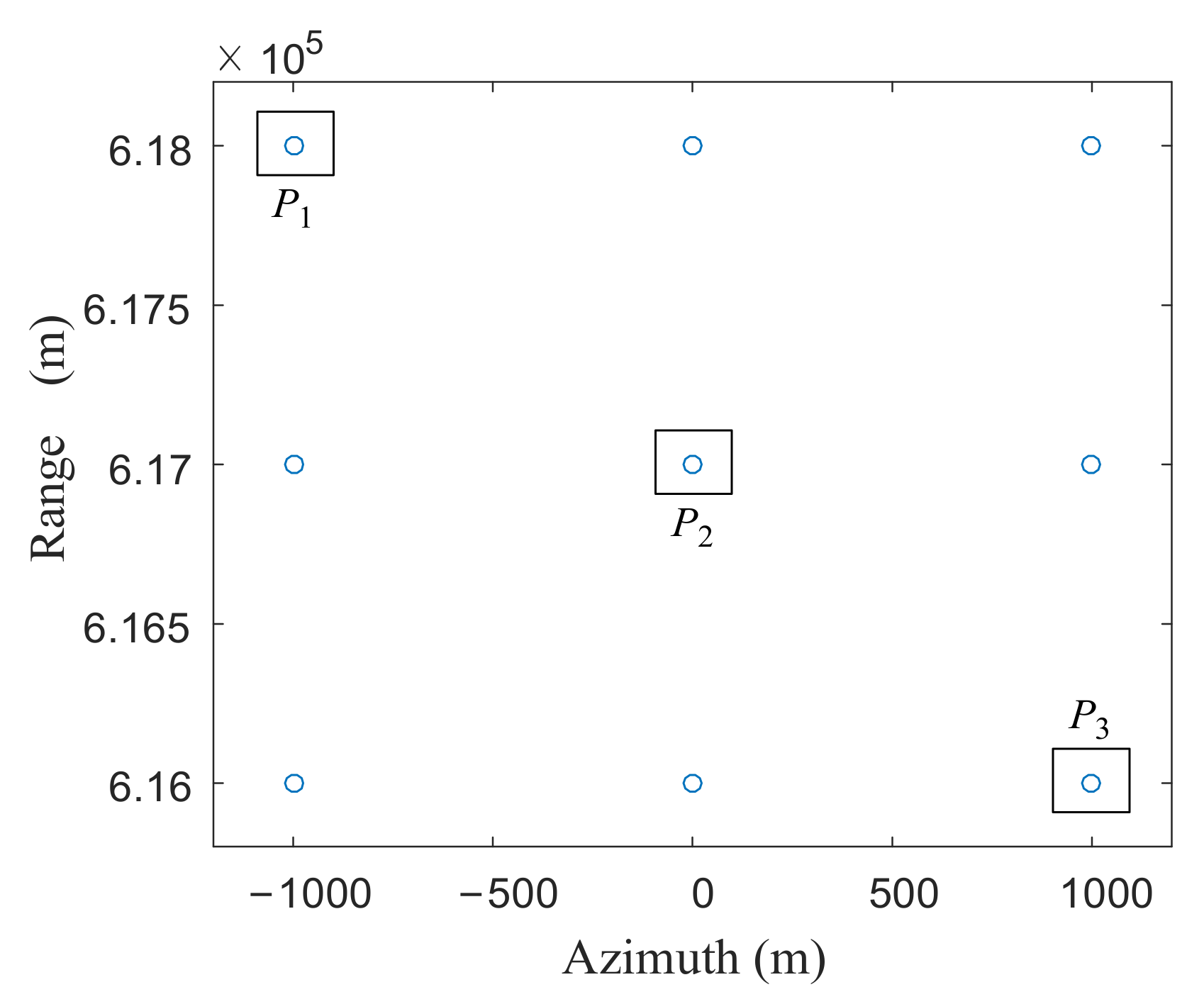
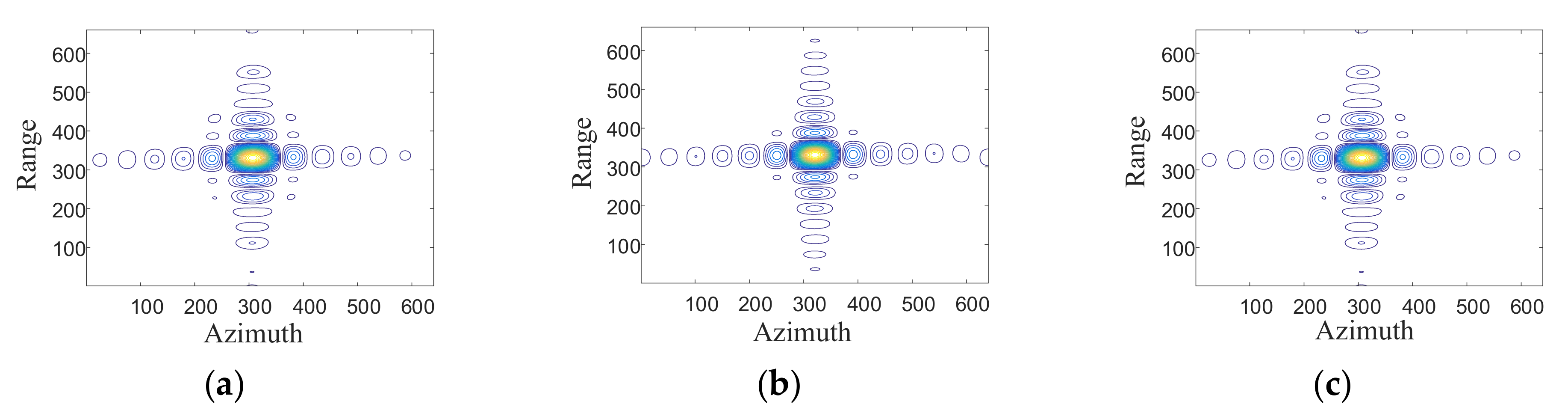
5.2. Simulation on Point Targets
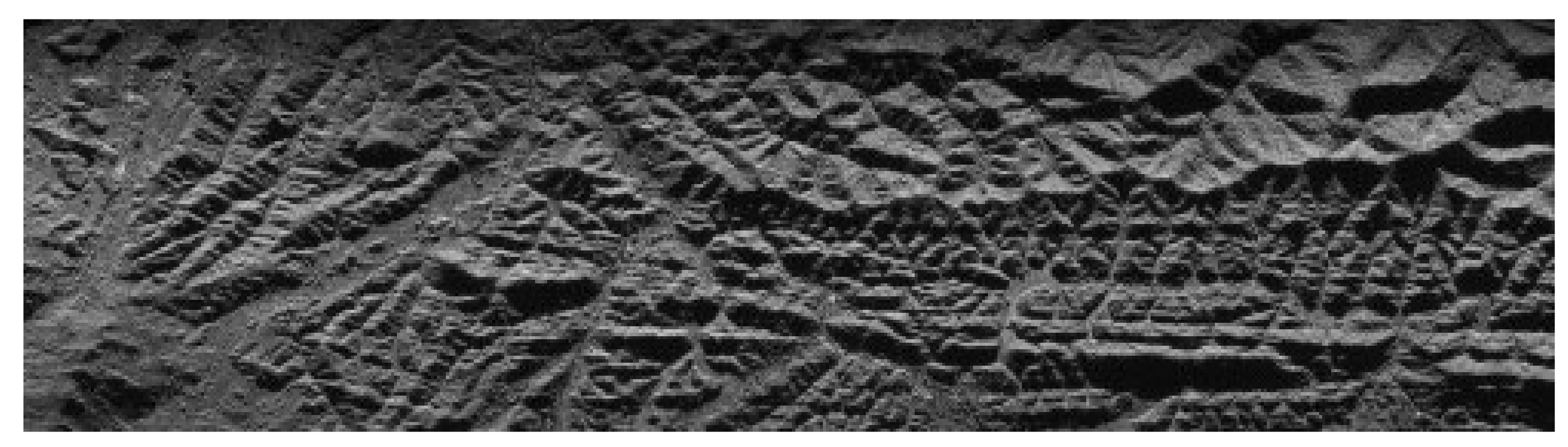
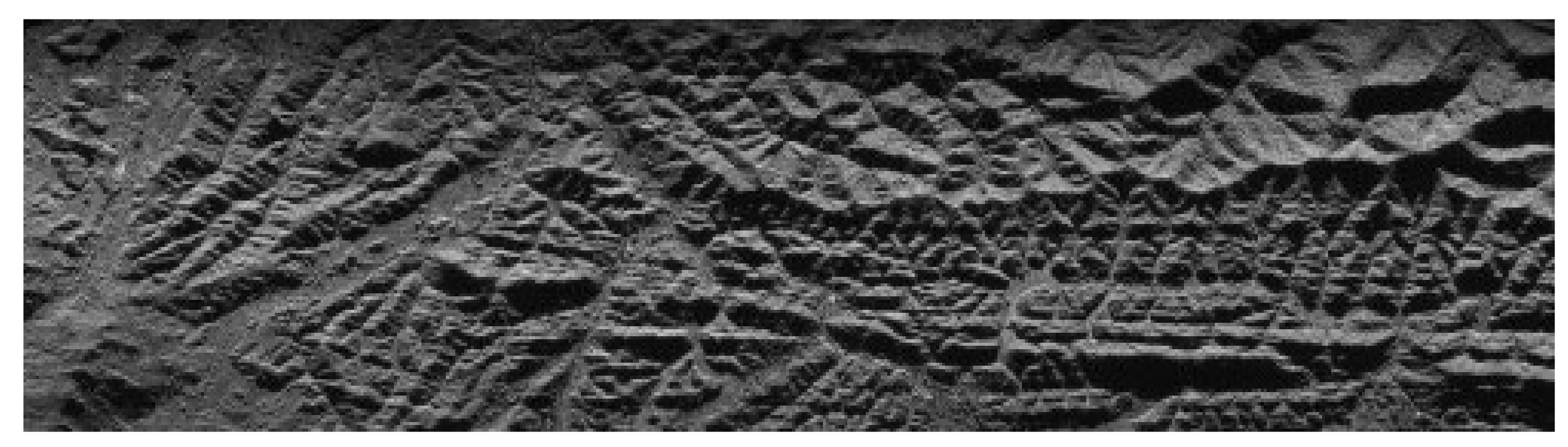
5.3. Simulation on Distributed Targets
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Freeman, A.; Johnson, W.T.K.; Huneycutt, B.; Jordan, R.; Hensley, S.; Siqueira, P.; Curlander, J. The myth of the minimum SAR antenna area constraint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 320–324. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.Y.; Huang, L.J.; Qiu, X.L.; Shang, M.; Han, B. An Improved Imaging Algorithm for High-Resolution Spotlight SAR with Continuous PRI Variation Based on Modified Sinc Interpolation. Sensors 2019, 19, 389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Y.Z.; Chen, L.Y.; Zhang, F.B.; Li, Y.; Wu, Y. A novel MIMO-SAR system based on simultaneous digital beam forming of both transceiver and receiver. Sensors 2020, 20, 6604. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhu, K.H.; Wang, L.N.; Liang, X.D.; Chen, L.Y. A novel orthogonal waveform separation scheme for airborne MIMO-SAR systems. Sensors 2018, 18, 3580. [Google Scholar] [CrossRef] [Green Version]
- Jin, G.D.; Deng, Y.K.; Wang, W.; Wang, R.; Zhang, Y.; Long, Y. Segmented phase code waveforms: A novel radar waveform for spaceborne MIMO-SAR. IEEE Trans. Geosci. Remote Sens. 2020, 1–16. [Google Scholar] [CrossRef]
- Hassanien, A.; Vorobyov, S.A. Phased-MIMO radar: A tradeoff between phased-array and MIMO radars. IEEE Trans. Signal Process. 2010, 58, 3137–3151. [Google Scholar] [CrossRef] [Green Version]
- Bu, X.X.; Zhang, Z.; Liang, X.D.; Chen, L.; Tang, H.; Zeng, Z.; Wang, J. A novel scheme for MIMO-SAR systems using rotational orbital angular momentum. Sensors 2018, 18, 3580. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.P.; Chang, X.Y.; Yao, F.; Li, L. Progress of small satellite of synthetic aperture radar. Space Elev. Tech. 2016, 1, 77–82. (In Chinese) [Google Scholar]
- Xu, H.; Liu, A.F.; Wang, F. Discussion on development of spaceborne light-SAR. Mod. Radar 2017, 39, 1–6. (In Chinese) [Google Scholar]
- Saito, H.; Hirokawa, J.; Tomura, T.; Akbar, P.R.; Pyne, B.; Tanaka, K.; Mita, M.; Kaneko, T.; Watanabe, H. Development of compact SAR systems for small satellite. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Pyne, B.; Saito, H.; Akbar, P.R.; Hirokawa, J.; Tomura, T.; Tanaka, K. Development and Performance Evaluation of Small SAR System for 100-kg Class Satellite. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3879–3891. [Google Scholar] [CrossRef]
- Yang, J.; Sun, G.C.; Wu, Y.F.; Sun, G. Range ambiguity suppression by azimuth phase coding in multichannel SAR. In Proceedings of the International Radar Conference 2013, Xi’an, China, 14–16 April 2013. [Google Scholar]
- Zhang, J.J.; Sun, G.C.; Zhou, F.; Xing, M.D.; Bao, Z. MIMO-SAR based on azimuth phase coding linear frequency modulation waveforms. Syst. Eng. Electron. 2014, 8, 1505–1510. [Google Scholar]
- Zhou, F.; Ai, J.Q.; Dong, Z.Y.; Zhang, J.J.; Xing, M.D. A Novel MIMO-SAR Solution Based on Azimuth Phase Coding Waveforms and Digital Beamforming. Sensors 2018, 18, 3374–3389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jing, W.; Wu, Q.S.; Xing, M.D.; Bao, Z. Image formation of wide-swath high resolution MIMO-SAR. J. Syst. Simul. 2008, 20, 4373–4378. (In Chinese) [Google Scholar]
- Wu, Q.S.; Xing, M.D.; Liu, B.C.; Bao, Z. Wide swath imaging with the plane-array MIMO-SAR system. Acta Electron. Sin. 2010, 38, 4. (In Chinese) [Google Scholar]
- Alshaya, M.; Yaghoobi, M.; Mulgrew, B. High-resolution wide-swath IRCI-free MIMO SAR. IEEE Trans. Geosci. Remote Sens. 2020, 58, 713–725. [Google Scholar] [CrossRef]
- Chen, Q.; Deng, Y.; Wang, R.; Liu, Y. Investigation of multichannel sliding spotlight SAR for ultrahigh-resolution and wide-swath imaging. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1339–1343. [Google Scholar] [CrossRef]
- Zhang, J.J.; Sun, G.C.; Xing, M.D.; Bao, Z.; Zhou, F. An efficient signal reconstruction algorithm for stepped frequency MIMO-SAR in the spotlight and sliding spotlight modes. Hindawi Int. J. Antenn. Propag. 2014, 2014, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.G.; Huang, X.T.; Jin, T.; Thompson, J.; Zhou, Z. Synthetic aperture radar imaging using stepped frequency waveform. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2026–2036. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, Q.Y.; Hu, J.M.; Li, C.; Shi, S.; Fang, G. An efficient algorithm based on CSA for THz stepped-frequency SAR imaging. IEEE Geosci. Remote Sens. Lett. 2020, 1–5. [Google Scholar] [CrossRef]
- Aubry, A.; Carotenuto, V.; Maio, A.D.; Pallotta, L. High range resolution profile estimation via a cognitive stepped frequency technique. IEEE Trans. Aero. Elec. Sys. 2018, 55, 444–458. [Google Scholar] [CrossRef]
- Berens, P. SAR with ultra-high range resolution using synthetic bandwidth. In Proceedings of the 1999 IEEE International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999. [Google Scholar]
- Wilkinson, A.J.; Lord, R.T.; Inggs, M.R. Stepped-frequency processing by reconstruction of target reflectivity spectrum. In Proceedings of the 1998 South African Symposium on Communications and Signal Processing, Rondebosch, South Africa, 8 September 1998. [Google Scholar]
- Zhou, F.; Sun, G.C.; Xia, X.G.; Xing, M.; Bao, Z. Stepped frequency synthetic preprocessing algorithm for inverse synthetic aperture radar imaging in fast moving target echo model. IET Radar Sonar Nav. 2014, 8, 864–874. [Google Scholar] [CrossRef]
- Luo, X.L.; Wang, R.; Deng, Y.K.; Xu, W. Influences of channel errors and interference on the OFDM-MIMO SAR. In Proceedings of the 2013 IEEE Radar Conference, Ottawa, ON, Canada, 29 April–3 May 2013. [Google Scholar]
- Jing, G.B.; Sun, G.C.; Xia, X.G.; Xing, M.-D.; Bao, Z. A novel two-step approach of error estimation for stepped-frequency MIMO-SAR. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2290–2294. [Google Scholar] [CrossRef]
- Jing, G.B.; Sun, G.C.; Xing, M.D.; Bao, Z.; Sheng, J.; Liu, Y. A unified error estimation method for multi-modes SF-SAR in bandwidth synthesis processing. In Proceedings of the 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018. [Google Scholar]
- Sun, G.C.; Liu, Y.B.; Xing, M.D.; Wang, S.; Guo, L.; Yang, J. A real-time imaging algorithm based on sub-aperture CS-Dechirp for GF3-SAR data. Sensors 2018, 18, 2562. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deng, Y.; Zheng, H.; Wang, R.; Feng, J.; Liu, Y. Internal calibration for stepped-frequency chirp SAR imaging. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1105–1109. [Google Scholar] [CrossRef]
- Rodriguez-Cassola, M.; Baumgartner, S.V.; Krieger, G.; Moreira, A. Bistatic TerraSAR-X/F-SAR spaceborne–airborne SAR experiment: Description, data processing, and results. IEEE Trans. Geosci. Remote 2010, 48, 781–794. [Google Scholar] [CrossRef] [Green Version]
- Meta, A.; Mittermayer, J.; Prats, P.; Scheiber, R.; Steinbrecher, U. TOPS imaging with TerraSAR-X: Mode design and performance analysis. IEEE Trans. Geosci. Remote 2010, 48, 759–769. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of satellites | 3 |
| Platform velocity | 7391 m/s |
| Center line distance | 617 km |
| Step frequency | 500 MHz |
| PRF | 5000 Hz |
| Signal bandwidth | 500 MHz |
| Synthetic aperture time | 13.04 s |
| Number of sub apertures | 8 |
| Center frequency of whole bandwidth | 9.6 GHz |
| Resolution | 0.1 m |
| Baseline distance | 500 m |
| Range Sampling Numbers | Azimuth Sampling Numbers | Average Running Time of 5 TBS Experiments (s) | Average Running Time of 5 Improved TBS Experiments (s) |
|---|---|---|---|
| 8192 | 65,536 | 17,961 | 11,164 |
| 4096 | 32,768 | 10,705 | 7203 |
| 4096 | 16,384 | 531 | 356 |
| 4096 | 8192 | 342 | 221 |
| Point Target | Range | Azimuth | ||
|---|---|---|---|---|
| PSLR (dB) | ISLR (dB) | PSLR (dB) | ISLR (dB) | |
| P1 | −13.60 | −10.35 | −13.23 | −9.87 |
| P2 | −13.61 | −10.37 | −13.23 | −9.77 |
| P3 | −13.33 | −9.75 | −13.88 | −10.71 |
| Algorithm | PRF (Hz) | Na |
|---|---|---|
| Full-aperture MIMO-SAR Algorithm | 89,000 | 1,160,560 |
| APC Algorithm | 30,000 | 391,200 |
| Proposed Algorithm | 5000 | 65,200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, F.; Yang, J.; Jia, L.; Yang, X.; Xing, M. Ultra-High Resolution Imaging Method for Distributed Small Satellite Spotlight MIMO-SAR Based on Sub-Aperture Image Fusion. Sensors 2021, 21, 1609. https://0-doi-org.brum.beds.ac.uk/10.3390/s21051609
Zhou F, Yang J, Jia L, Yang X, Xing M. Ultra-High Resolution Imaging Method for Distributed Small Satellite Spotlight MIMO-SAR Based on Sub-Aperture Image Fusion. Sensors. 2021; 21(5):1609. https://0-doi-org.brum.beds.ac.uk/10.3390/s21051609
Chicago/Turabian StyleZhou, Fang, Jun Yang, Lu Jia, Xingming Yang, and Mengdao Xing. 2021. "Ultra-High Resolution Imaging Method for Distributed Small Satellite Spotlight MIMO-SAR Based on Sub-Aperture Image Fusion" Sensors 21, no. 5: 1609. https://0-doi-org.brum.beds.ac.uk/10.3390/s21051609