
Probabilistic Seismic Response Prediction of Three-Dimensional Structures Based on Bayesian Convolutional Neural Network

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Framework of Bayesian Deep Learning Model
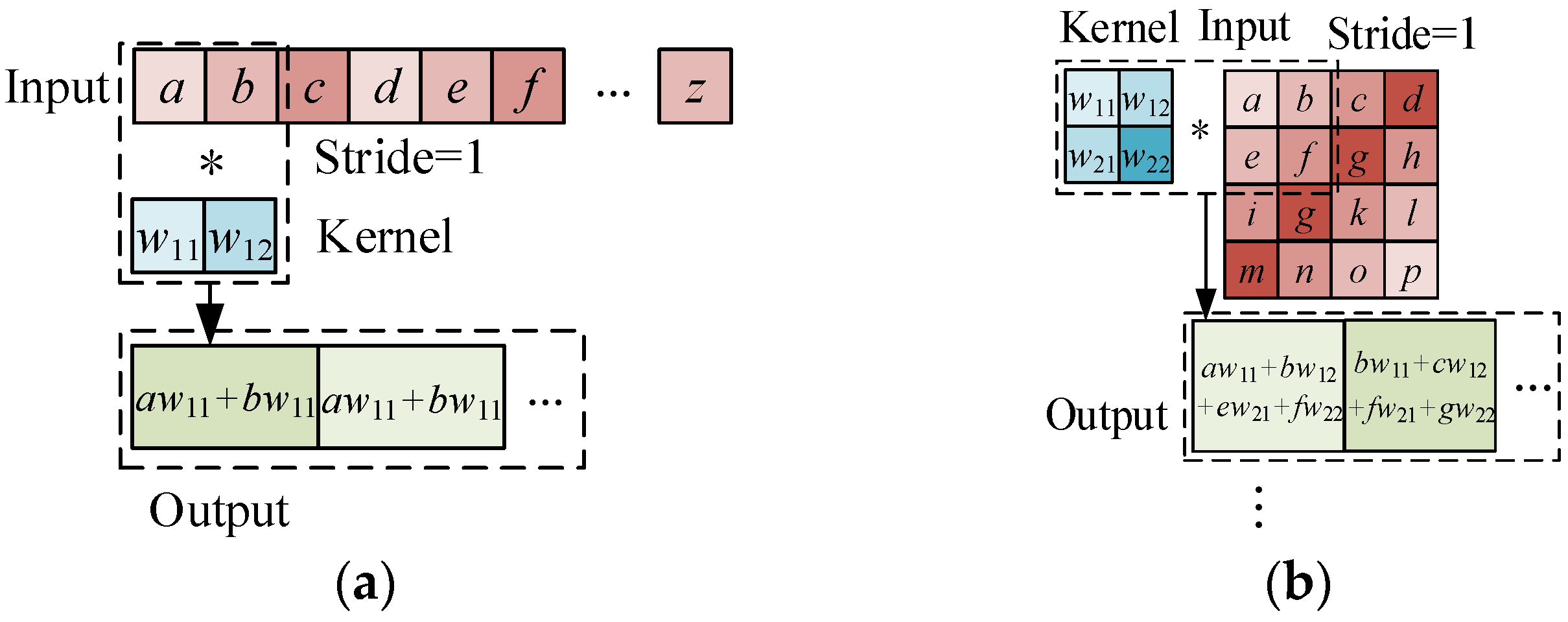
2.1. Convolutional Neural Network
2.2. Training of Bayesian Deep Learning Model
- (1)
- Variational inference
- (2)
- Bayes back propagation algorithm
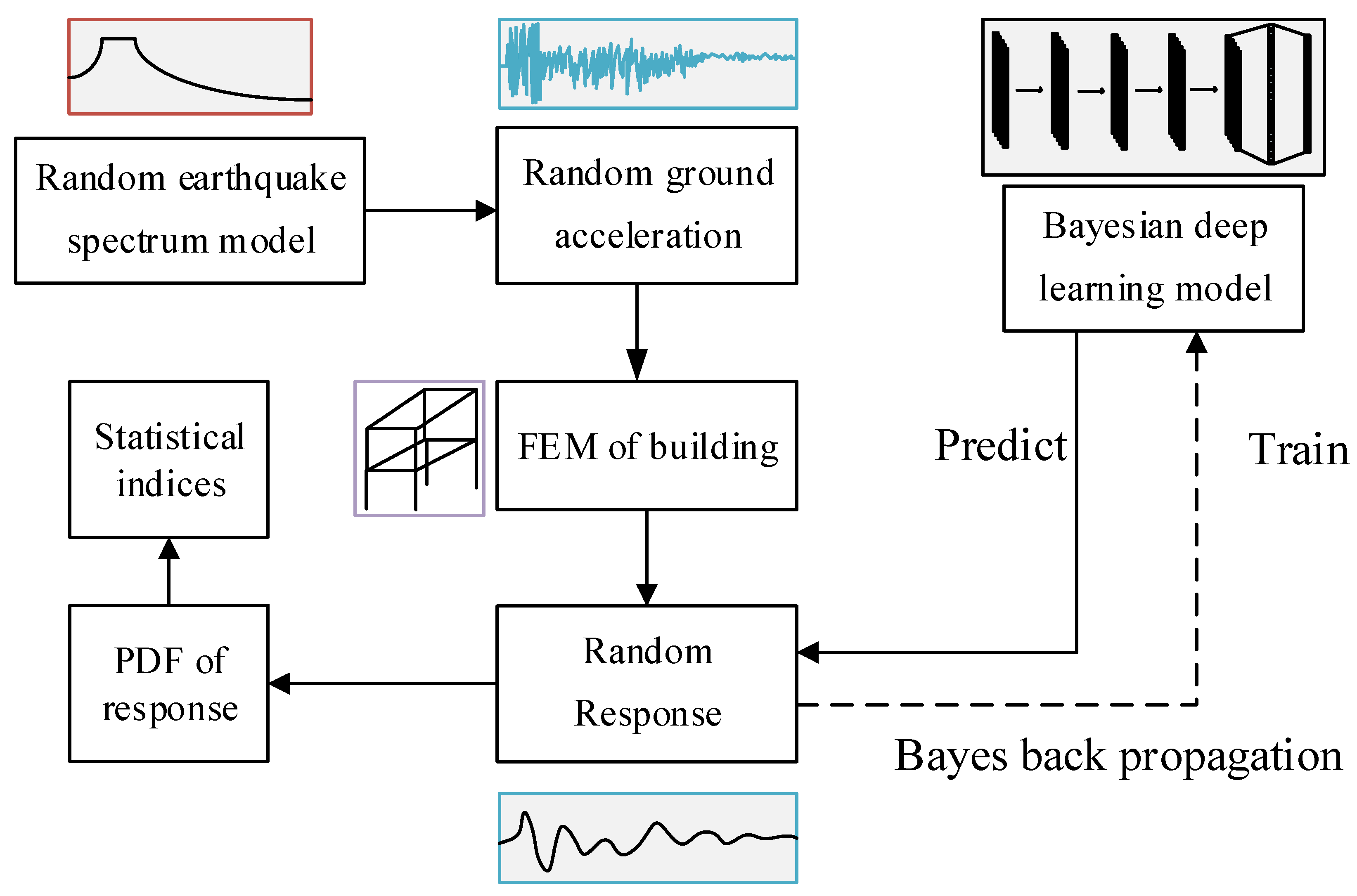
2.3. The Framework of Proposed Method
3. Three-Dimensional Random Building Structure
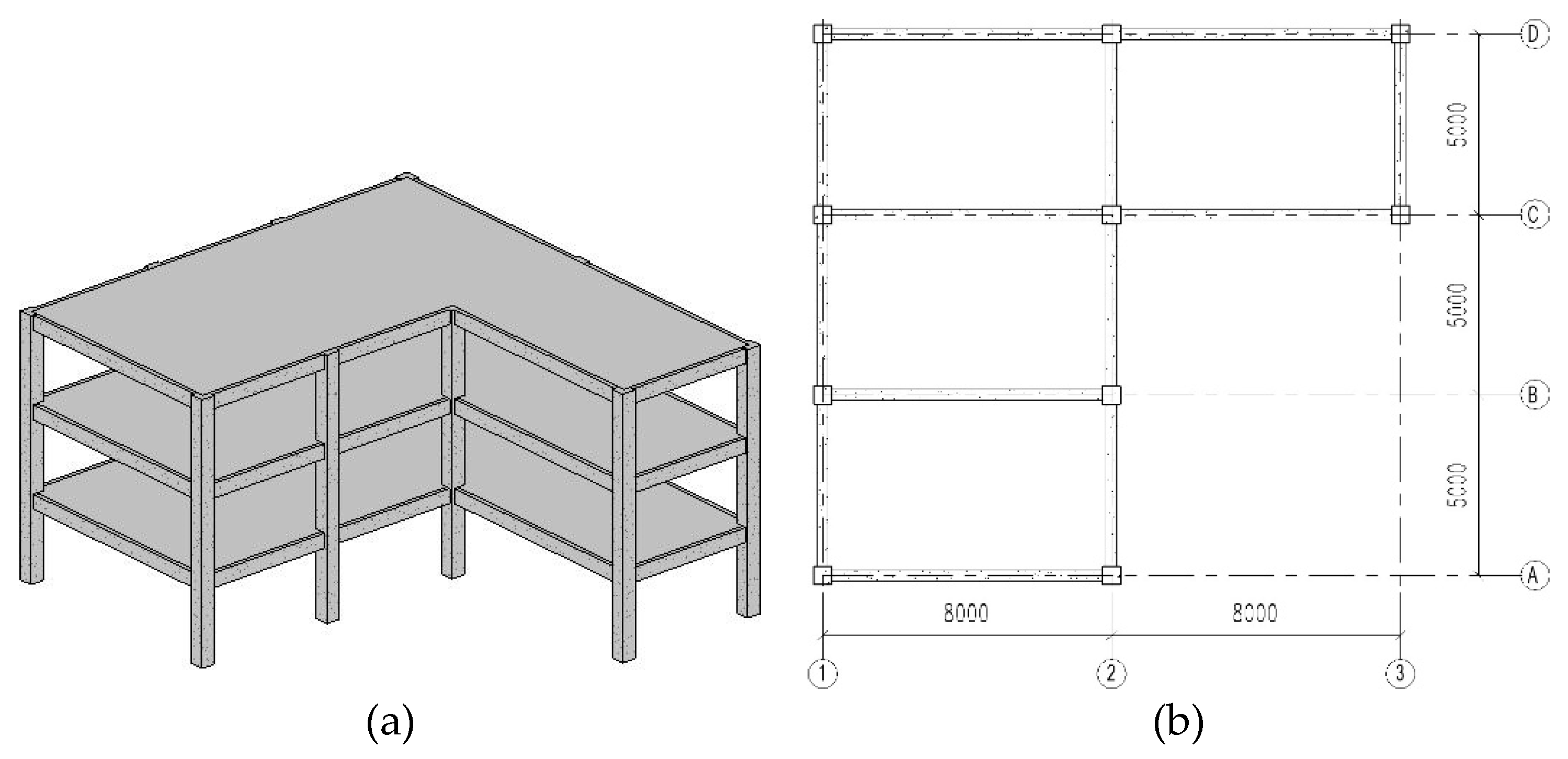
3.1. Three Dimensional Building with Random Characteristics
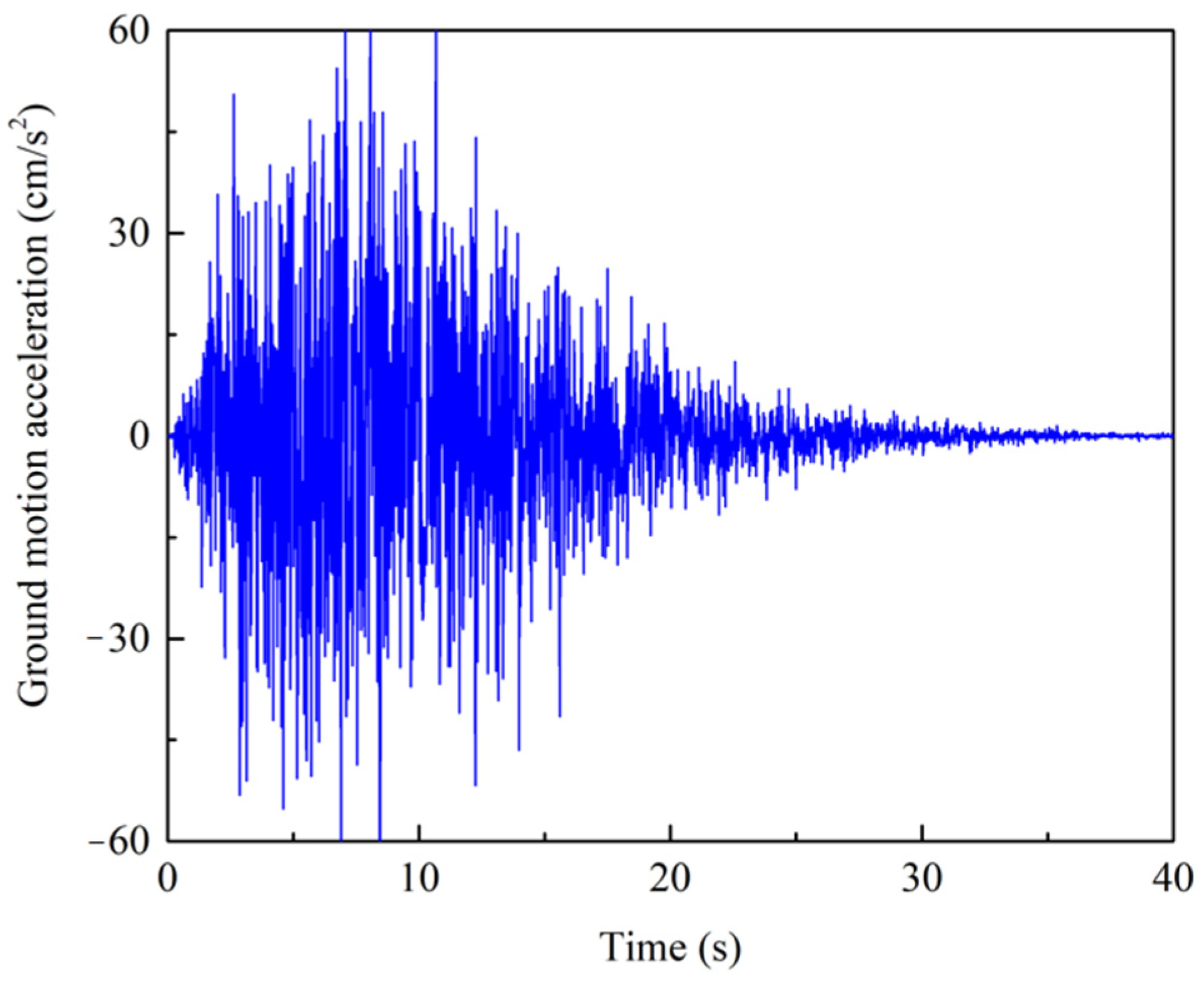
3.2. The Samples of Ground Motion Acceleration
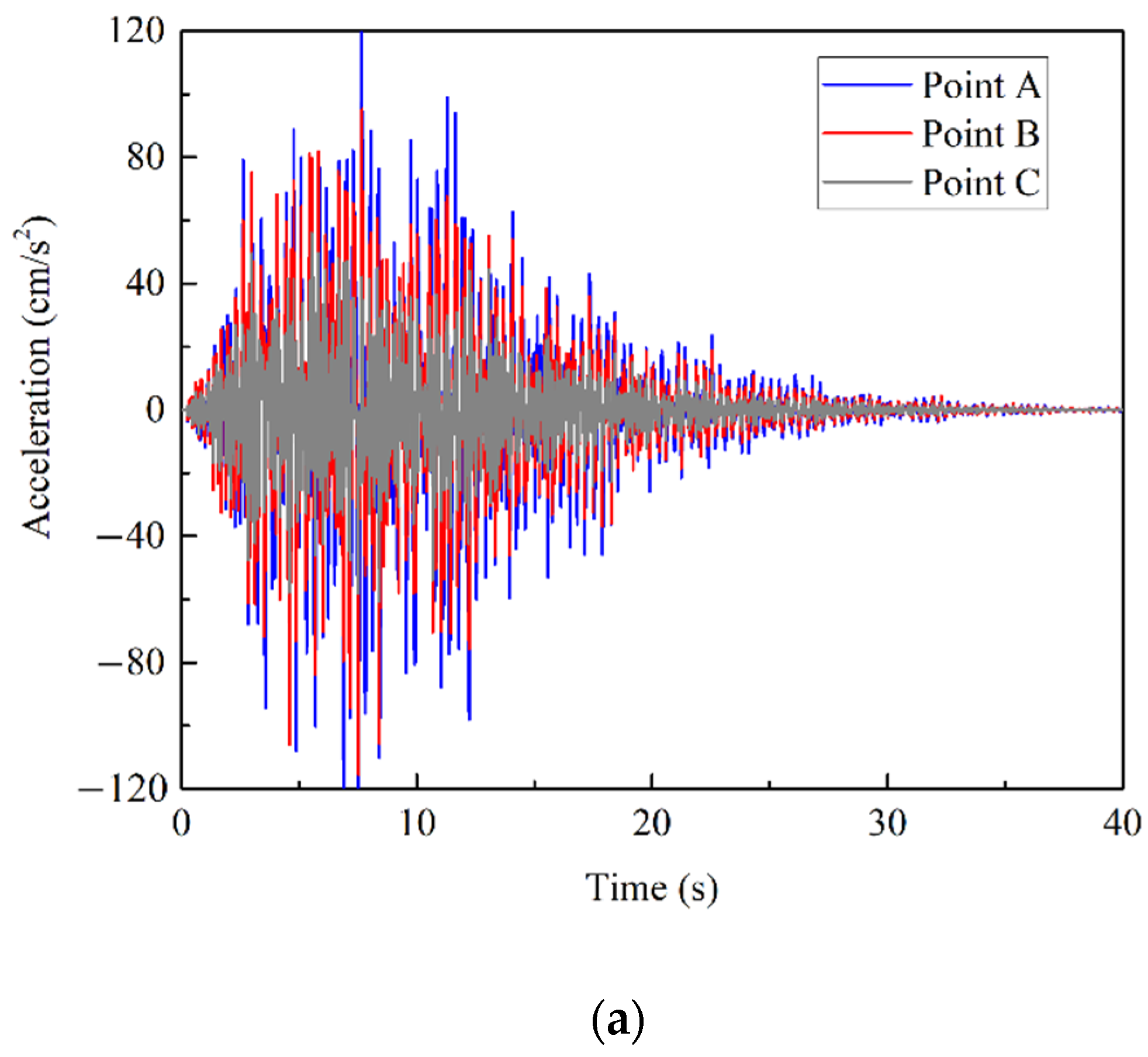
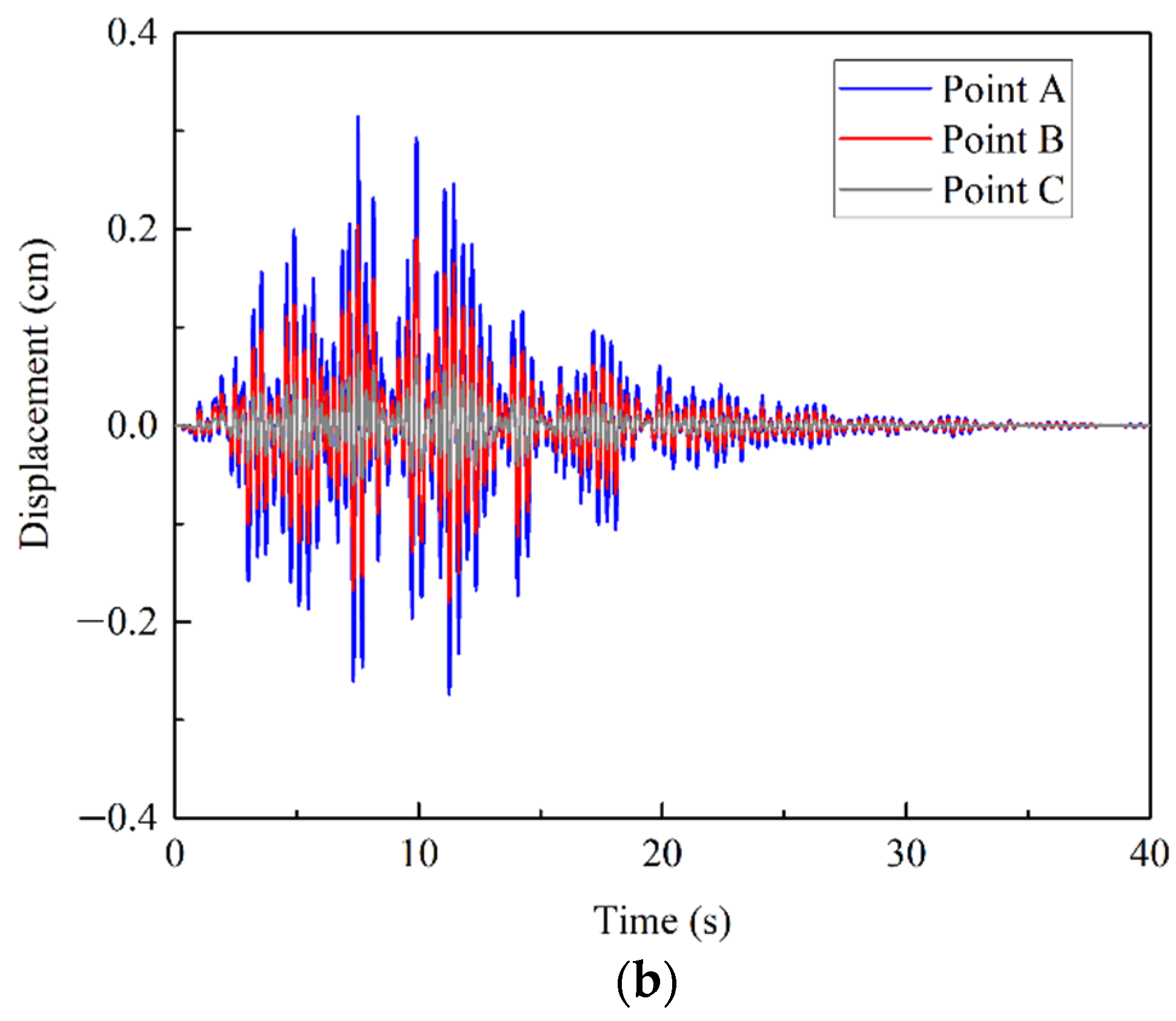
3.3. Modeling and Dynamic Response Analysis of 3D Building
4. Numerical Results
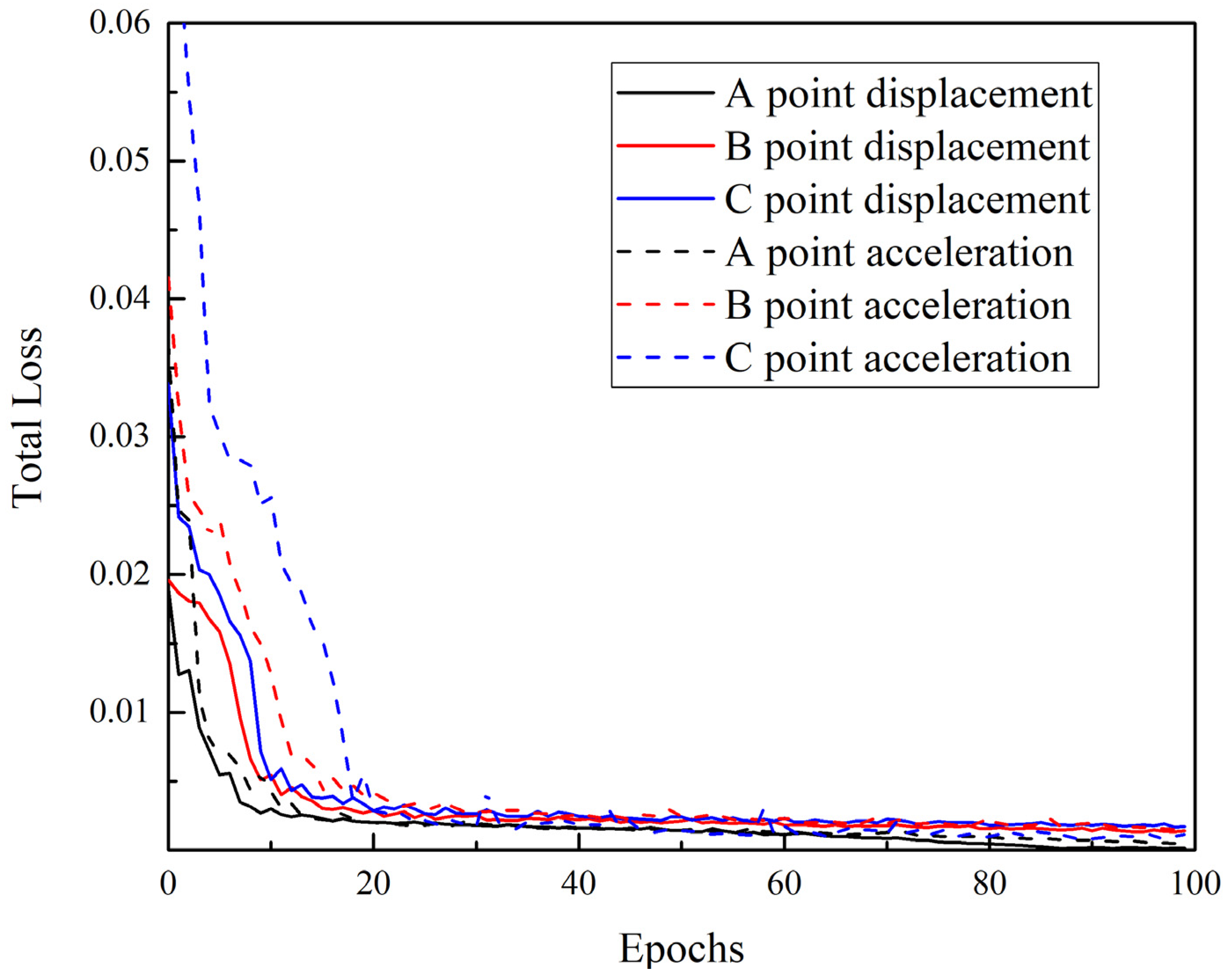
4.1. Model Training
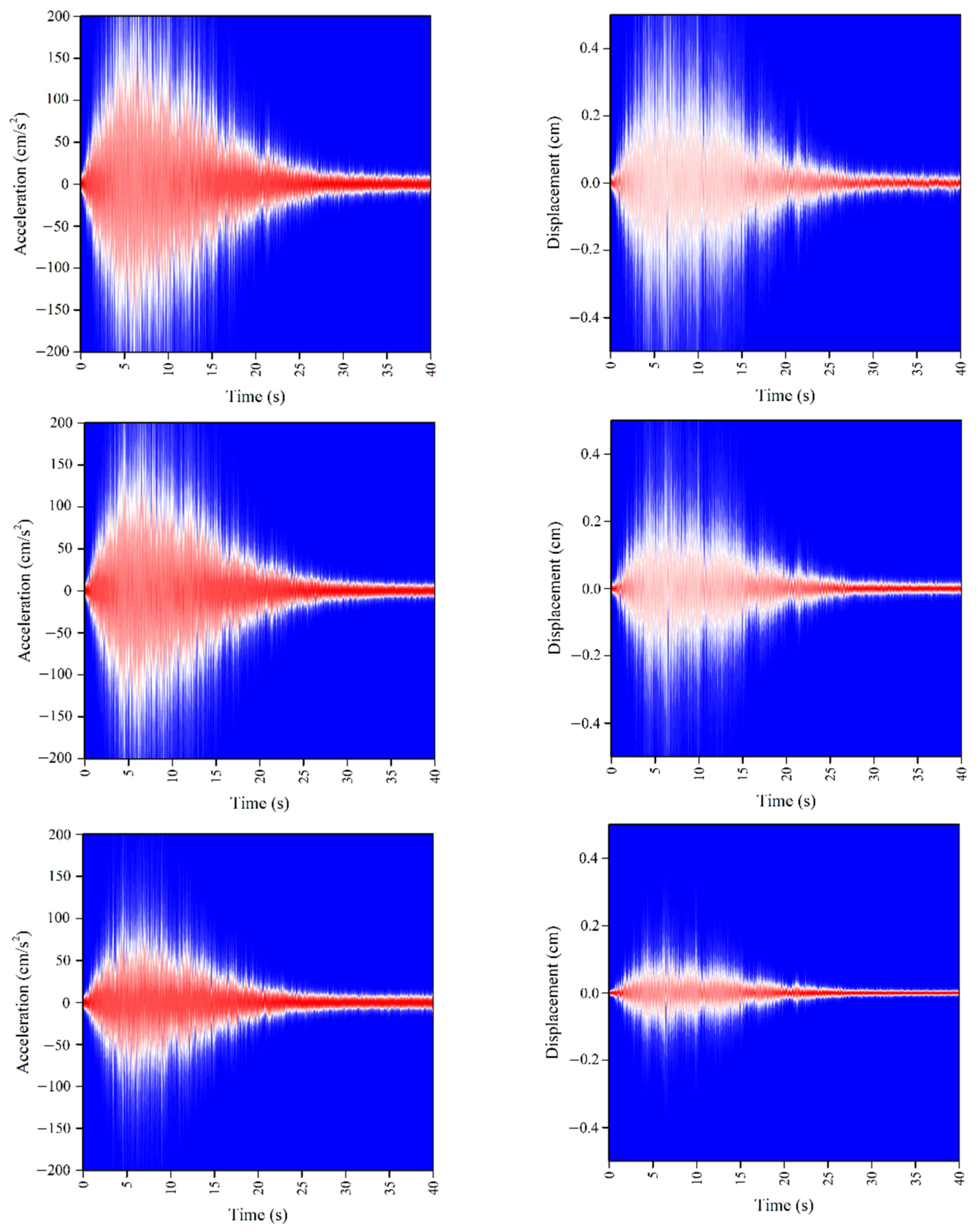
4.2. Response Prediction Results
5. Discussion
5.1. Influence of Parameter Randomness
5.2. Influence of Input Noise
6. Conclusions
- (1)
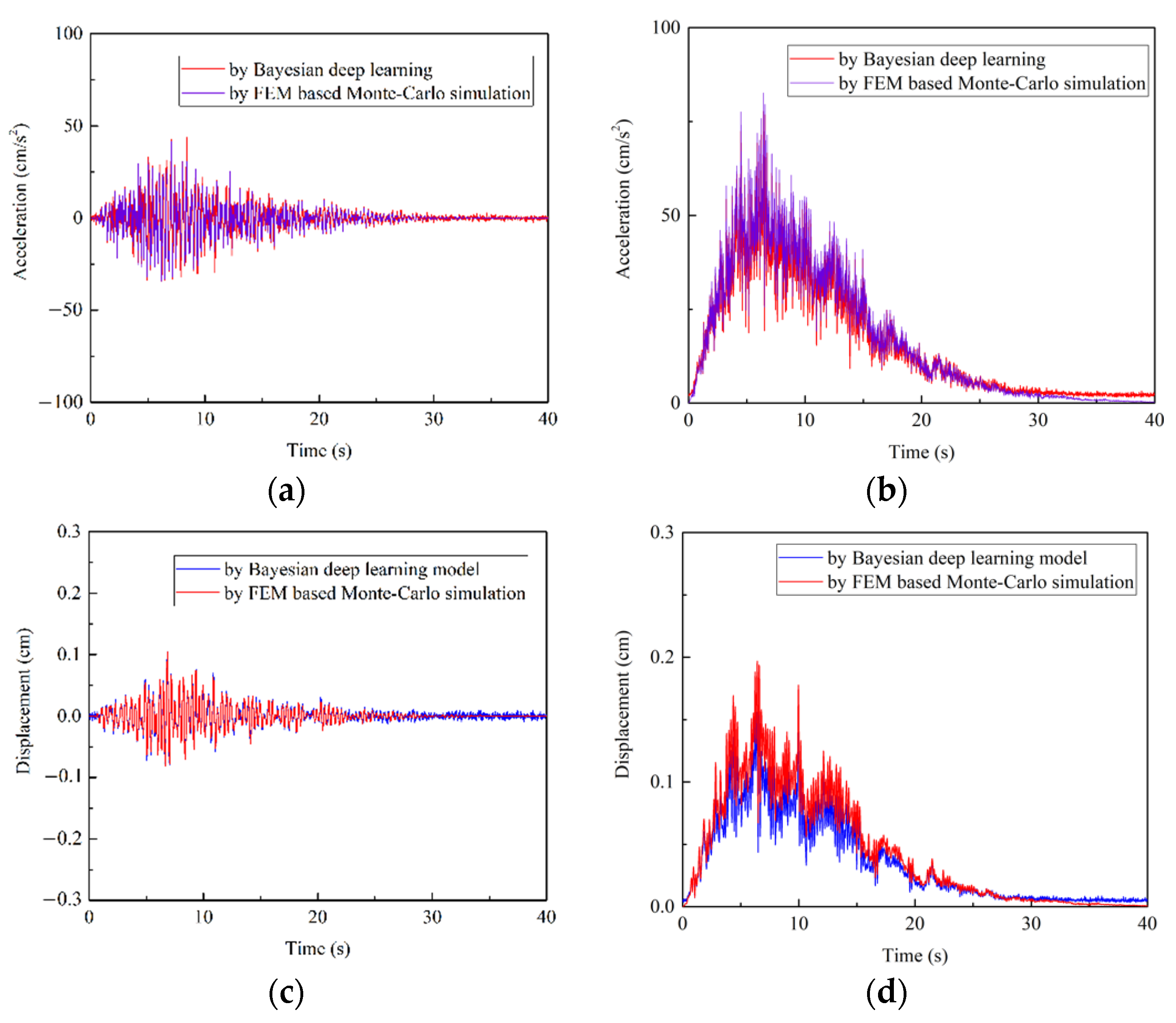
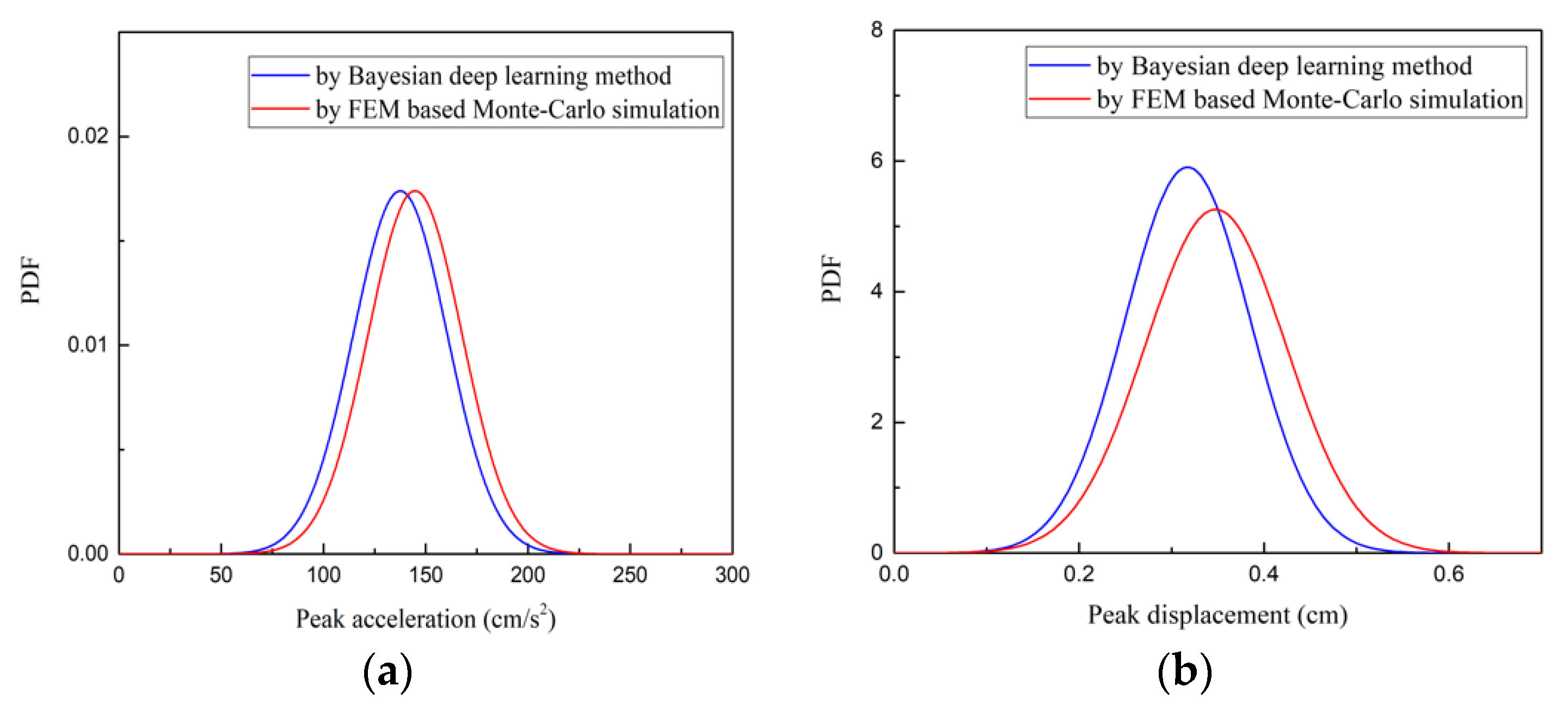
- The proposed Bayesian deep learning model can reliably predict the random response of a 3D building structure with random parameters and obtain the PDF of response. The prediction of mean value is better than the prediction of standard deviation because of the parameter randomness.
- (2)
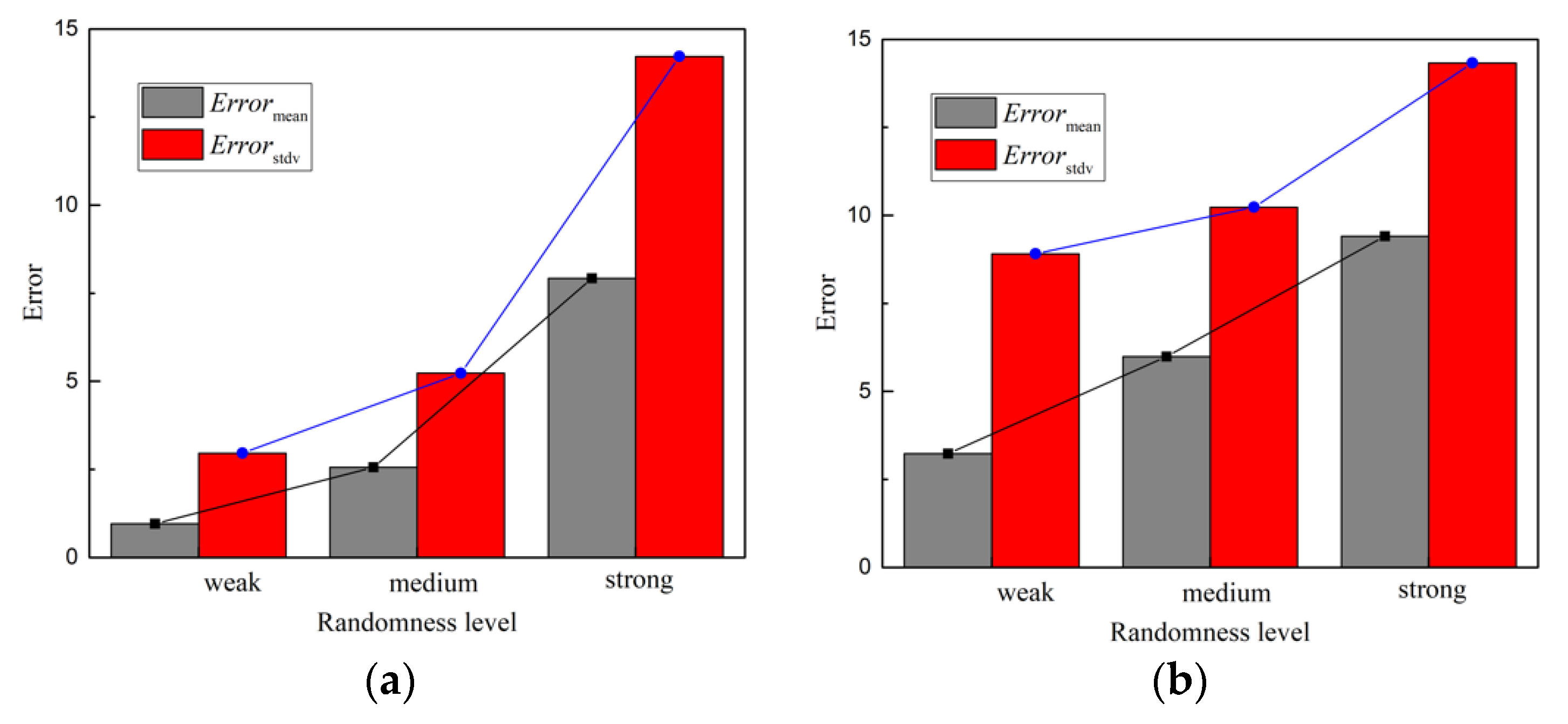
- As the parameter randomness increases, the effective performance of Bayesian deep learning model deteriorates. Compared with mean value prediction, the standard deviation prediction is more seriously affected by parameter randomness.
- (3)
- Input noises have very little influence on the proposed Bayesian deep learning model. The proposed model is robust and can work under a high noise level of 20%. Therefore, the proposed model has promising potential for practical applications in civil, mechanical, and aerospace engineering.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aslani, H.; Miranda, E. Probability-based seismic response analysis. Eng. Struct. 2005, 27, 1151–1163. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures; Pearson Education, Prentice Hall: Hoboken, NJ, USA, 2011. [Google Scholar]
- Ibrahim, R.A. Structural Dynamics with Parameter Uncertainties. ASME Appl. Mech. Rev. March 1987, 40, 309–328. [Google Scholar] [CrossRef]
- Desceliers, C.; Soize, C.; Cambier, S. Non-parametric–parametric model for random uncertainties in non-linear structural dynamics: Application to earthquake engineering. Earthq. Eng. Struct. Dyn. 2004, 33, 315–327. [Google Scholar] [CrossRef] [Green Version]
- Silik, A.; Noori, M.; Altabey, W.A.; Ghiasi, R. Selecting optimum levels of wavelet multi-resolution analysis for time-varying signals in structural health monitoring. Struct. Control Health Monit. 2021, 28, e2762. [Google Scholar] [CrossRef]
- Silik, A.; Noori, M.; Altabey, W.A.; Ghiasi, R.; Wu, Z. Comparative Analysis of Wavelet Transform for Time-Frequency Analysis and Transient Localization in Structural Health Monitoring. Struct. Durab. Health Monit. 2021, 15, 1–22. [Google Scholar] [CrossRef]
- Silik, A.; Noori, M.; Altabey, W.; Dang, J.; Ghiasi, R.; Wu, Z. Optimum wavelet selection for nonparametric analysis toward structural health monitoring for processing big data from sensor network: A comparative study. Struct. Health Monit. 2021, 21, 803–825. [Google Scholar] [CrossRef]
- Silik, A.; Noori, M.; Altabey, W.; Ghiasi, R.; Wu, Z. Analytic Wavelet Selection for Time–Frequency Analysis of Big Data Form Civil Structure Monitoring. Lect. Notes Civ. Eng. 2021, 156, 431–455. [Google Scholar] [CrossRef]
- Pradlwarter, H.J.; Schuëller, G.I. On advanced Monte Carlo simulation procedures in stochastic structural dynamics. Int. J. Non-Linear Mech. 1997, 32, 735–744. [Google Scholar] [CrossRef]
- Ibarra, L.; Krawinkler, H. Variance of collapse capacity of SDOF systems under earthquake excitations. Earthq. Eng. Struct. Dyn. 2011, 40, 1299–1314. [Google Scholar] [CrossRef]
- Liao, S.; Li, J. A stochastic approach to site-response component in seismic ground motion coherency model. Soil Dyn. Earthq. Eng. 2002, 22, 813–820. [Google Scholar] [CrossRef]
- Li, J.; Chen, J.; Sun, W.; Peng, Y. Advances of the probability density evolution method for nonlinear stochastic systems. Probabilistic Eng. Mech. 2012, 28, 132–142. [Google Scholar] [CrossRef]
- Huang, Y.; Xiong, M.; Zhou, H. Ground seismic response analysis based on the probability density evolution method. Eng. Geol. 2015, 198, 30–39. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Z.; Xu, Y. Probability density evolution analysis of a shear-wall structure under stochastic ground motions by shaking table test. Soil Dyn. Earthq. Eng. 2019, 122, 53–66. [Google Scholar]
- Liu, Z.; Ruan, X.; Liu, Z.; Lu, H. Probability density evolution analysis of stochastic nonlinear structure under non-stationary ground motions. Struct. Infrastruct. Eng. 2019, 15, 1049–1059. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Ghaboussi, J.; Joghataie, A. Active control of structures using neural networks. J. Eng. Mech. 1995, 121, 555–567. [Google Scholar] [CrossRef]
- Chen, H.M.; Qi, G.Z.; Yang, J.C.S.; Amini, F. Neural network for structural dynamic model identification. J. Eng. Mech. 1995, 121, 1377–1381. [Google Scholar] [CrossRef]
- Pei, J.S.; Smyth, A.W.; Kosmatopoulos, E.B. Analysis and modification of Volterra/Wiener neural networks for the adaptive identification of non-linear hysteretic dynamic systems. J. Sound Vib. 2004, 275, 693–718. [Google Scholar] [CrossRef]
- Lagaros, N.D.; Papadrakakis, M. Neural network based prediction schemes of the non-linear seismic response of 3D buildings. Adv. Eng. Softw. 2012, 44, 92–115. [Google Scholar] [CrossRef]
- Joghataie, A.; Farrokh, M. Dynamic analysis of nonlinear frames by Prandtl neural networks. J. Eng. Mech. 2008, 134, 961–969. [Google Scholar] [CrossRef]
- Xie, S.L.; Zhang, Y.H.; Chen, C.H.; Zhang, X.N. Identification of nonlinear hysteretic systems by artificial neural network. Mech. Syst. Signal Process. 2013, 34, 76–87. [Google Scholar] [CrossRef]
- Farrokh, M.; Dizaji, M.S.; Joghataie, A. Modeling hysteretic deteriorating behavior using generalized Prandtl neural network. J. Eng. Mech. 2015, 141, 04015024. [Google Scholar] [CrossRef]
- Wu, R.T.; Jahanshahi, M.R. Deep convolutional neural network for structural dynamic response estimation and system identification. J. Eng. Mech. 2019, 145, 04018125. [Google Scholar] [CrossRef]
- Kim, T.; Kwon, O.S.; Song, J. Response prediction of nonlinear hysteretic systems by deep neural networks. Neural Netw. 2019, 111, 1–10. [Google Scholar] [CrossRef]
- Zhang, R.; Liu, Y.; Sun, H. Physics-guided convolutional neural network (PhyCNN) for data-driven seismic response modeling. Eng. Struct. 2020, 215, 110704. [Google Scholar] [CrossRef]
- Zhang, R.; Chen, Z.; Chen, S.; Zheng, J.; Büyüköztürk, O.; Sun, H. Deep long short-term memory networks for nonlinear structural seismic response prediction. Comput. Struct. 2019, 220, 55–68. [Google Scholar] [CrossRef]
- Wang, C.; Xu, L.Y.; Fan, J.S. A general deep learning framework for history-dependent response prediction based on UA-Seq2Seq model. Comput. Methods Appl. Mech. Eng. 2020, 372, 113357. [Google Scholar] [CrossRef]
- Eshkevari, S.S.; Takáč, M.; Pakzad, S.N.; Jahani, M. DynNet: Physics-based neural architecture design for nonlinear structural response modeling and prediction. Eng. Struct. 2021, 229, 111582. [Google Scholar] [CrossRef]
- Peng, H.; Yan, J.; Yu, Y.; Luo, Y. Structural Surrogate Model and Dynamic Response Prediction with Consideration of Temporal and Spatial Evolution: An Encoder–Decoder ConvLSTM Network. Int. J. Struct. Stab. Dyn. 2021, 21, 2150140. [Google Scholar] [CrossRef]
- Wang, H.; Wu, T. Knowledge-enhanced deep learning for wind-induced nonlinear structural dynamic analysis. J. Struct. Eng. 2020, 146, 04020235. [Google Scholar] [CrossRef]
- Li, H.; Wang, T.; Wu, G. Dynamic response prediction of vehicle-bridge interaction system using feedforward neural network and deep long short-term memory network. Structures 2021, 34, 2415–2431. [Google Scholar] [CrossRef]
- Kim, T.; Song, J.; Kwon, O.S. Probabilistic evaluation of seismic responses using deep learning method. Struct. Saf. 2020, 84, 101913. [Google Scholar] [CrossRef]
- Li, H.; Wang, T.; Wu, G. A Bayesian deep learning approach for random vibration analysis of bridges subjected to vehicle dynamic interaction. Mech. Syst. Signal Process. 2022, 170, 108799. [Google Scholar] [CrossRef]
- Wang, T.; Li, H.; Noori, M. Response Prediction of Random Structure Based on Bayesian Neural Network. In Lecture Notes in Civil Engineering, Proceedings of the 7th International Conference on Architecture, Materials and Construction, Lisbon, Portugal, 27–29 October 2021; Springer-Nature: Berlin, Germany, 2021; pp. 19–25. ISBN 978-3-030-94513-8. [Google Scholar]
- Wang, H.; Yeung, D.Y. A survey on Bayesian deep learning. ACM Comput. Surv. CSUR 2020, 53, 1–37. [Google Scholar] [CrossRef]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar]
- Yuen, K.V. Bayesian Methods for Structural Dynamics and Civil Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Hershey, J.R.; Olsen, P.A. Approximating the Kullback Leibler divergence between Gaussian mixture models. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing, Honolulu, HI, USA, 15–20 April 2007; Volume 4, pp. 4–317. [Google Scholar]
- Graves, A. Practical variational inference for neural networks. In Proceedings of the 24th International Conference on Neural Information Processing Systems, Granada, Spain, 12–15 December 2011; pp. 2348–2356. [Google Scholar]
- Blundell, C.; Cornebise, J.; Kavukcuoglu, K.; Wierstra, D. Weight uncertainty in neural network. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 1613–1622. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Lin, Y.K.; Yong, Y. Evolutionary kanai-tajimi earthquake models. J. Eng. Mech. 1987, 113, 1119–1137. [Google Scholar] [CrossRef]
- Rofooei, F.R.; Mobarake, A.; Ahmadi, G. Generation of artificial earthquake records with a nonstationary Kanai–Tajimi model. Eng. Struct. 2001, 23, 827–837. [Google Scholar] [CrossRef]
- Guo, Y.; Kareem, A. System identification through nonstationary data using time–frequency blind source separation. J. Sound Vib. 2016, 371, 110–131. [Google Scholar] [CrossRef]
- Ministry of Housing and Urban-Rural Development of the People’s Republic of China. Code for Seismic Design of Building GB50011-2010 (2016 Edition); China Architecture and Building Press: Beijing, China, 2016. (In Chinese) [Google Scholar]
- Bai, G.; Zhu, L. Study on the parameters of Kanai-Tajimi model based on the code (GB50011-2001). World Earthq. Eng. 2004, 20, 114–118. (In Chinese) [Google Scholar]
- Zhu, X.Q.; Law, S. Orthogonal function in moving loads identification on a multi-span bridge. J. Sound Vib. 2001, 245, 329–345. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mean Value | Variable Coefficient | Type of Distribution |
|---|---|---|---|
| Density of concrete (kg/m3) | 2500 | 0.1 | Gaussian distribution |
| Density of steel bar (kg/m3) | 7600 | 0.1 | Gaussian distribution |
| Elastic of concrete (GPa) | 30.0 | 0.05 | Gaussian distribution |
| Elastic of steel bar (GPa) | 210 | 0.05 | Gaussian distribution |
| Damping ratio | 0.05 | 0.05 | Gaussian distribution |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Li, H.; Noori, M.; Ghiasi, R.; Kuok, S.-C.; Altabey, W.A. Probabilistic Seismic Response Prediction of Three-Dimensional Structures Based on Bayesian Convolutional Neural Network. Sensors 2022, 22, 3775. https://0-doi-org.brum.beds.ac.uk/10.3390/s22103775
Wang T, Li H, Noori M, Ghiasi R, Kuok S-C, Altabey WA. Probabilistic Seismic Response Prediction of Three-Dimensional Structures Based on Bayesian Convolutional Neural Network. Sensors. 2022; 22(10):3775. https://0-doi-org.brum.beds.ac.uk/10.3390/s22103775
Chicago/Turabian StyleWang, Tianyu, Huile Li, Mohammad Noori, Ramin Ghiasi, Sin-Chi Kuok, and Wael A. Altabey. 2022. "Probabilistic Seismic Response Prediction of Three-Dimensional Structures Based on Bayesian Convolutional Neural Network" Sensors 22, no. 10: 3775. https://0-doi-org.brum.beds.ac.uk/10.3390/s22103775