
Model-Based Correction of Temperature-Dependent Measurement Errors in Frequency Domain Electromagnetic Induction (FDEMI) Systems

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
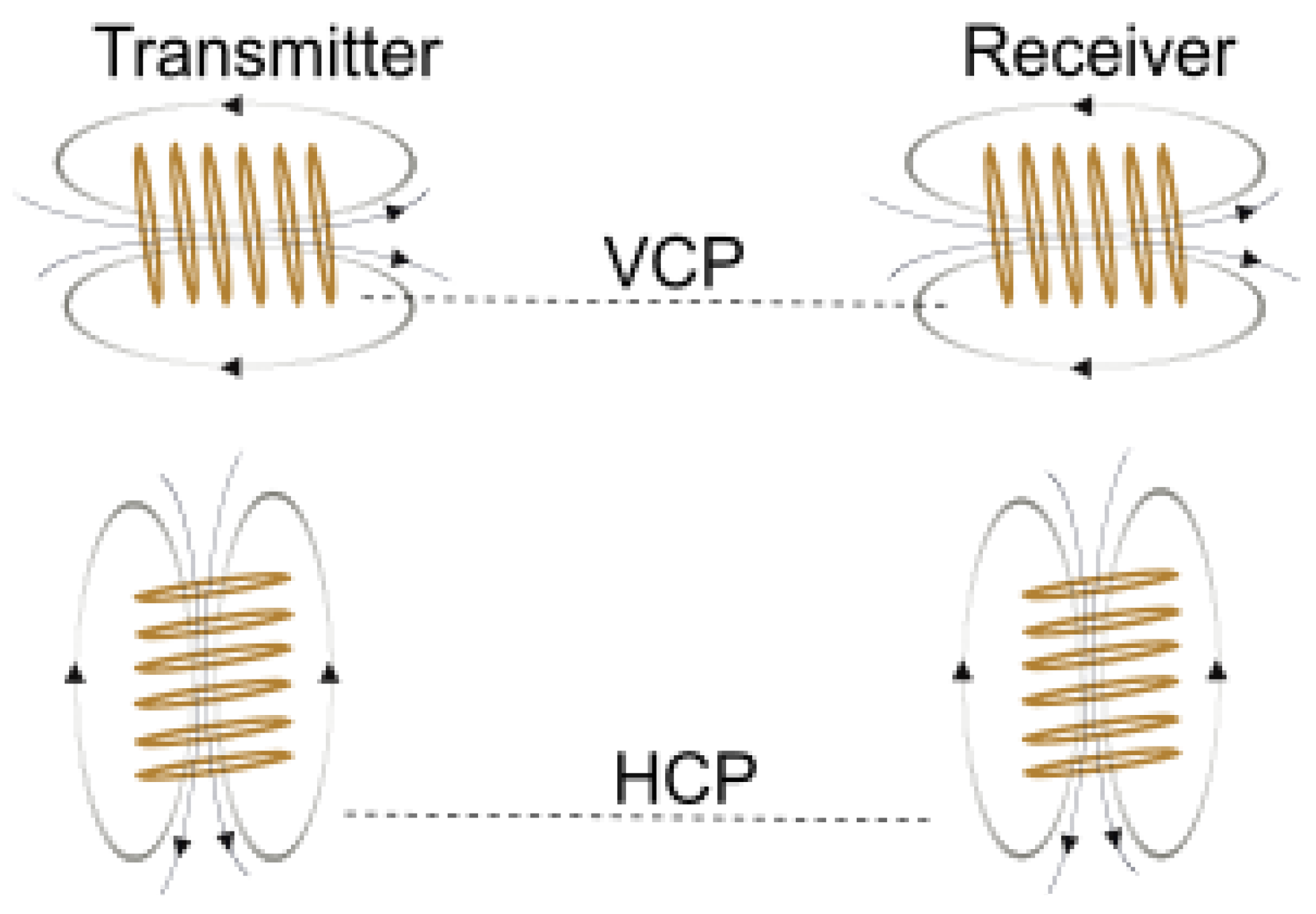
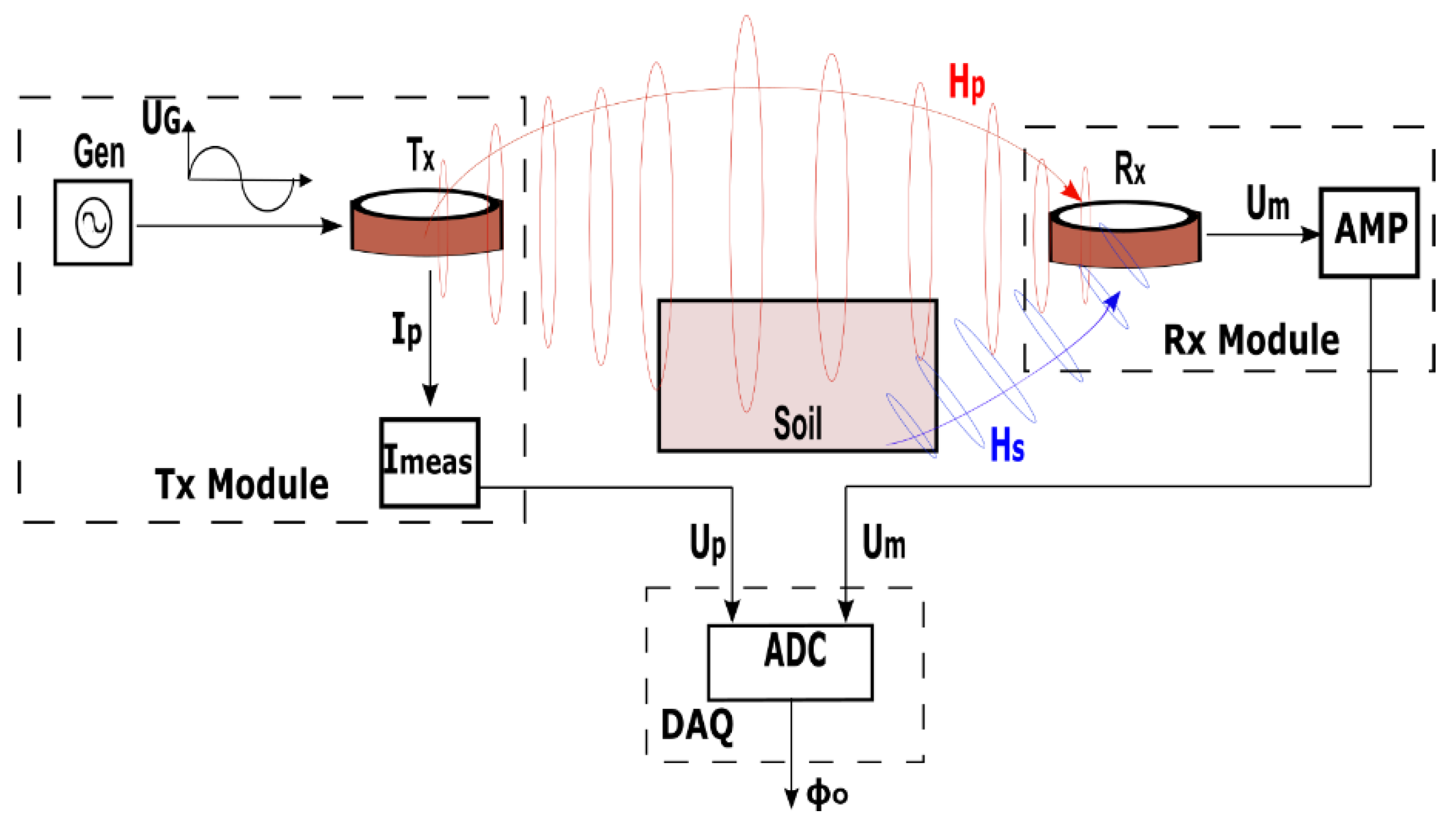
2.1. EMI Measurement System with Temperature Sensors
2.2. Phase Drift Model
2.2.1. Effective Temperature Variation
2.2.2. Low-Pass Filter
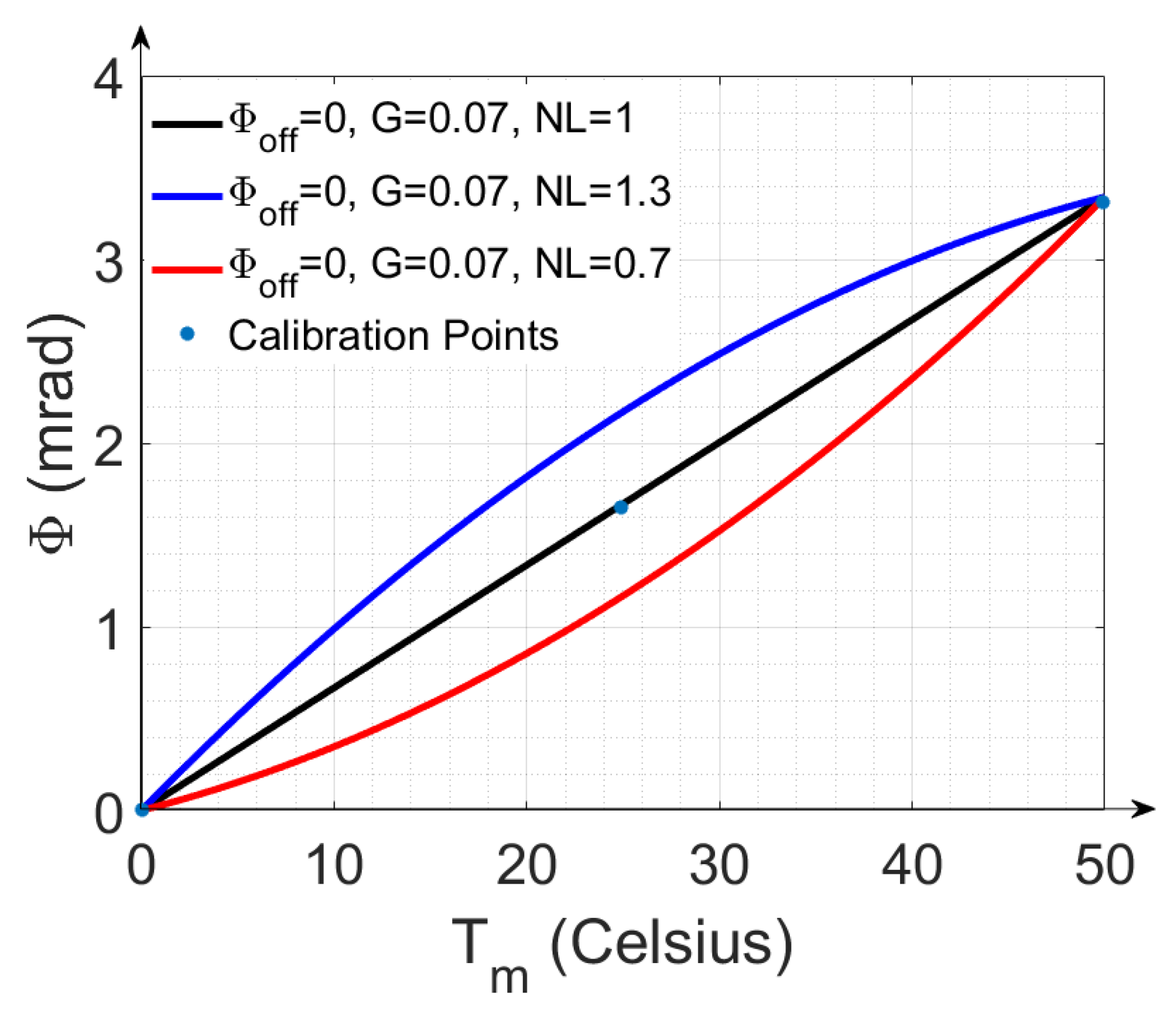
2.2.3. Phase Value Calculation and Correction
2.3. ECa Calculation
2.4. Drift Calibration Measurements
3. Results and Discussion
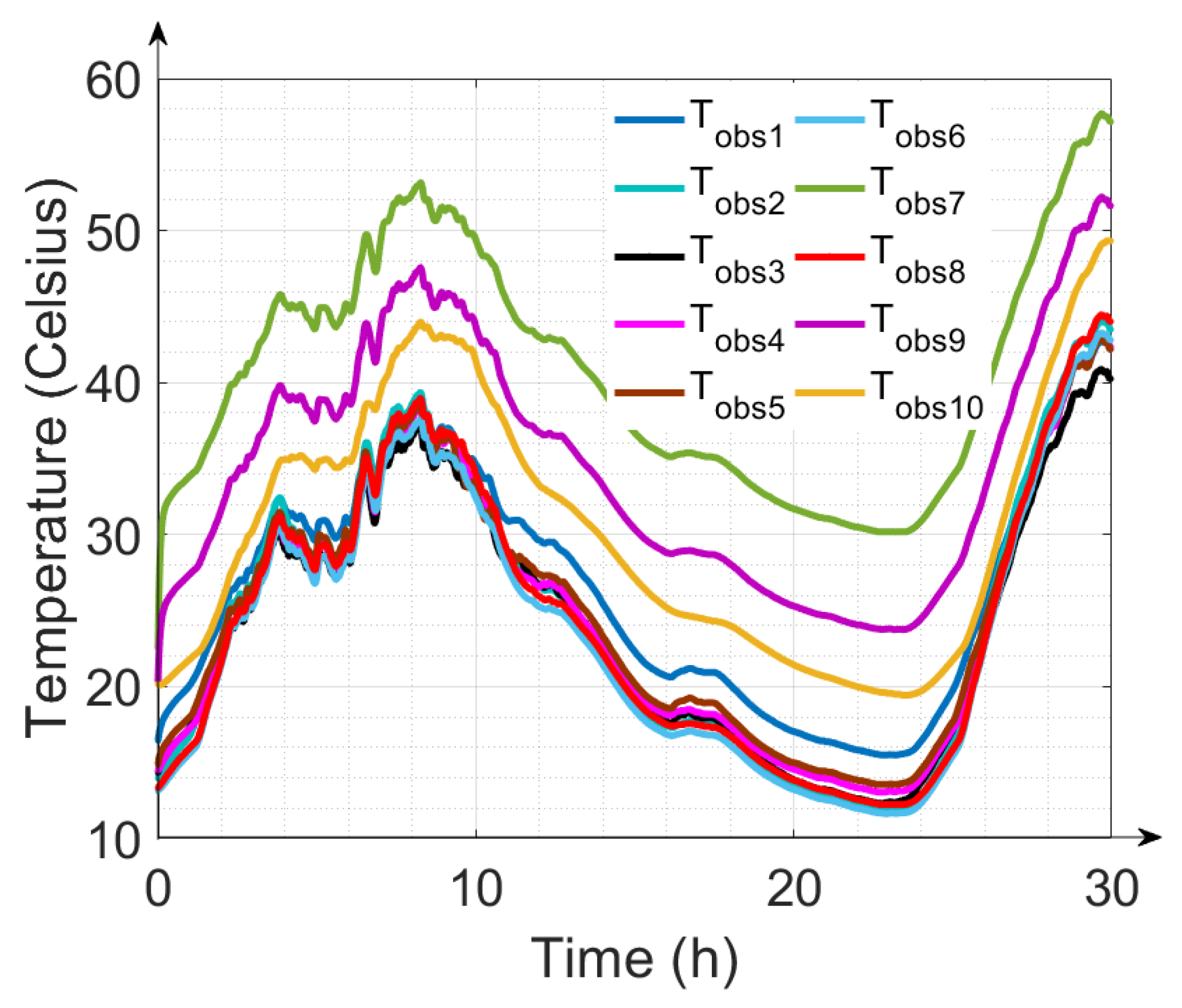
3.1. Measured Temperature Distribution
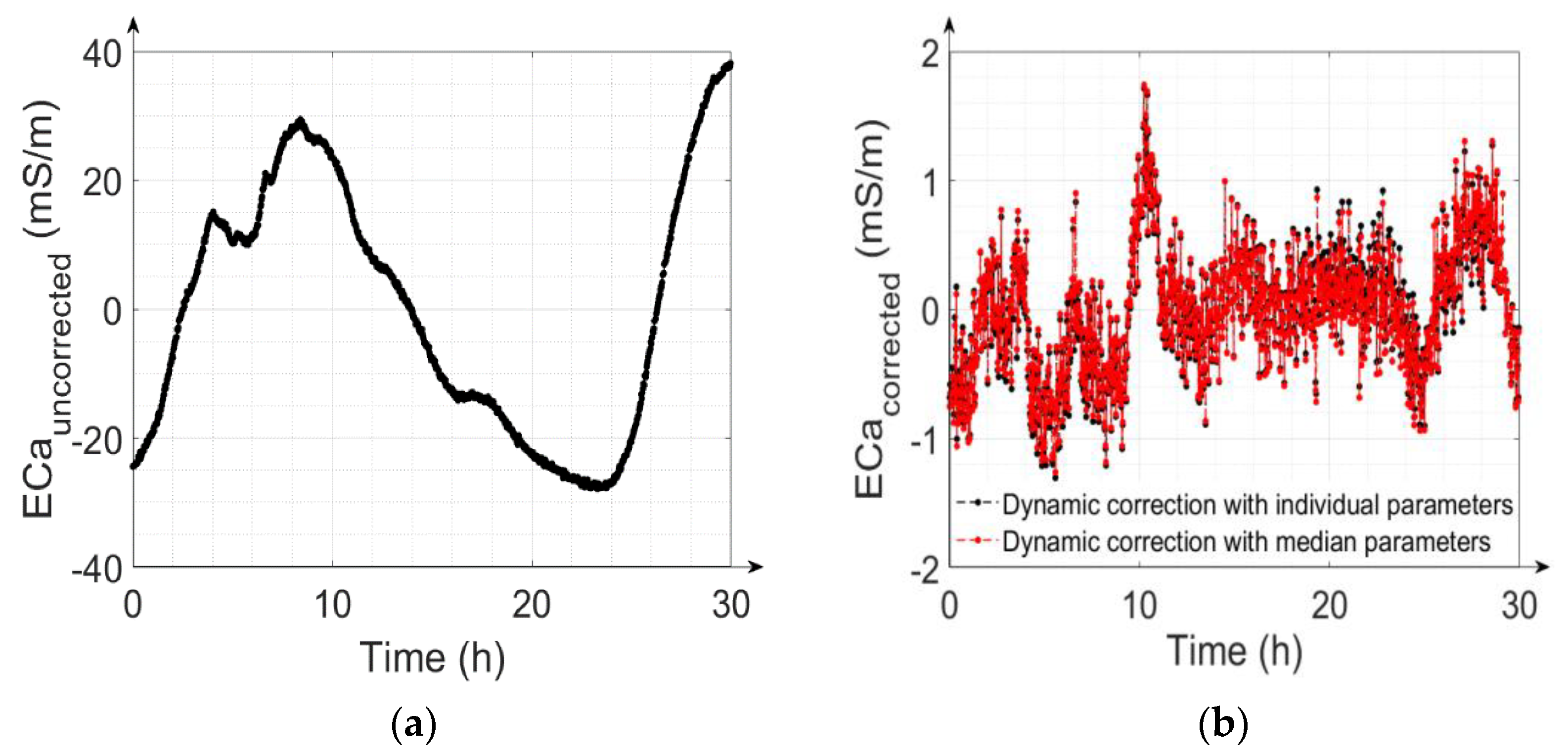
3.2. Performance of Calibration
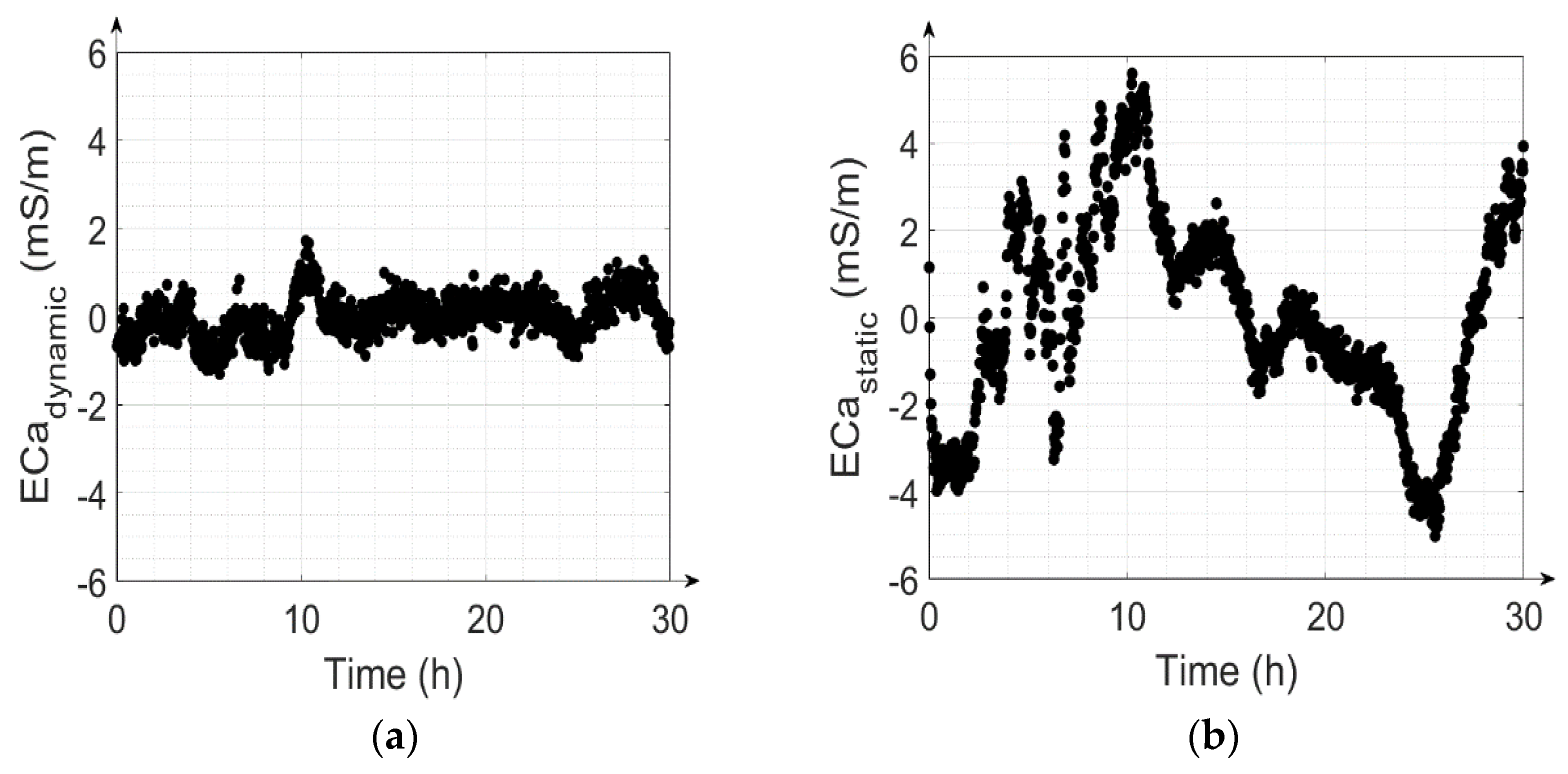
3.3. Advantage of Implementing the LPF in the Drift Correction Model
3.4. Effect of Soil Conductivity Changes on the Calibration
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Corwin, D.L.; Lesch, S.M. Application of Soil Electrical Conductivity to Precision Agriculture. Agron. J. 2003, 95, 455–471. [Google Scholar] [CrossRef]
- Doolittle, J.A.; Brevik, E.C.; Lincoln, N.; Doolittle, J.A.; Brevik, E.C. The use of electromagnetic induction techniques in soils studies. Geoderma 2014, 223–225, 33–45. [Google Scholar] [CrossRef] [Green Version]
- Heil, K.; Schmidhalter, U. Theory and Guidelines for the Application of the Geophysical Sensor EM38. Sensors 2019, 19, 4293. [Google Scholar] [CrossRef] [Green Version]
- Visconti, F.; De Paz, J.M. A semi-empirical model to predict the EM38 electromagnetic induction measurements of soils from basic ground properties. Eur. J. Soil Sci. 2020, 72, 720–738. [Google Scholar] [CrossRef]
- Cameron, D.; Read, D.; De Jong, E.; Oosterveld, M. Mapping salinity using resistivity and electromagnetic inductive techniques. Can. J. Soil Sci. 1981, 61, 67–78. [Google Scholar] [CrossRef]
- Visconti, F.; De Paz, J.M. Field Comparison of Electrical Resistance, Electromagnetic Induction, and Frequency Domain Reflectometry for Soil Salinity Appraisal. Soil Syst. 2020, 4, 61. [Google Scholar] [CrossRef]
- Corwin, D.L.; Rhoades, J.D. Measurement of Inverted Electrical Conductivity Profiles Using Electromagnetic Induction. Soil Sci. Soc. Am. J. 1984, 48, 288–291. [Google Scholar] [CrossRef]
- Badewa, E.; Unc, A.; Cheema, M.; Kavanagh, V.; Galagedara, L. Soil Moisture Mapping Using Multi-Frequency and Multi-Coil Electromagnetic Induction Sensors on Managed Podzols. Agronomy 2018, 8, 224. [Google Scholar] [CrossRef] [Green Version]
- Boaga, J. The use of FDEM in hydrogeophysics: A review. J. Appl. Geophys. 2017, 139, 36–46. [Google Scholar] [CrossRef]
- Altdorff, D.; Galagedara, L.; Nadeem, M.; Cheema, M.; Unc, A. Effect of agronomic treatments on the accuracy of soil moisture mapping by electromagnetic induction. Catena 2018, 164, 96–106. [Google Scholar] [CrossRef]
- Kachanoski, R.G.; Van Wesenbeeck, I.J.; Gregorich, E.G. Estimating spatial variations of soil water content using noncontacting electromagnetic inductive methods. Can. J. Soil Sci. 1988, 68, 715–722. [Google Scholar] [CrossRef]
- McNeill, J.D. Electromagnetic Terrain Conductivity Measurement at Low Induction Numbers; Technical Note TN-6; Geonics Pty Ltd.: Mississauga, ON, Canada, 1980. [Google Scholar]
- Schmäck, J.; Weihermüller, L.; Klotzsche, A.; Hebel, C.; Pätzold, S.; Welp, G.; Vereecken, H. Large-scale detection and quantification of harmful soil compaction in a post-mining landscape using multi-configuration electromagnetic induction. Soil Use Manag. 2021, 38, 212–228. [Google Scholar] [CrossRef]
- De Smedt, P.; Delefortrie, S.; Wyffels, F. Identifying and removing micro-drift in ground-based electromagnetic induction data. J. Appl. Geophys. 2016, 131, 14–22. [Google Scholar] [CrossRef]
- Altdorff, D.; Sadatcharam, K.; Unc, A.; Krishnapillai, M.; Galagedara, L. Comparison of Multi-Frequency and Multi-Coil Electromagnetic Induction (EMI) for Mapping Properties in Shallow Podsolic Soils. Sensors 2020, 20, 2330. [Google Scholar] [CrossRef] [Green Version]
- Saey, T.; De Smedt, P.; Islam, M.M.; Meerschman, E.; Van De Vijver, E.; Lehouck, A.; Van Meirvenne, M. Depth slicing of multi-receiver EMI measurements to enhance the delineation of contrasting subsoil features. Geoderma 2012, 189–190, 514–521. [Google Scholar] [CrossRef]
- Allred, B.J.; Ehsani, M.R.; Saraswat, D. The impact of temperature and shallow hydrologic conditions on the magnitude and spatial pattern consistency of electromagnetic induction measured soil electrical conductivity. Trans. ASAE 2005, 48, 2123–2135. [Google Scholar] [CrossRef]
- Mester, A.; van der Kruk, J.; Zimmermann, E.; Vereecken, H. Quantitative Two-Layer Conductivity Inversion of Multi-Configuration Electromagnetic Induction Measurements. Vadose Zone J. 2011, 10, 1319–1330. [Google Scholar] [CrossRef]
- von Hebel, C.; Rudolph, S.; Mester, A.; Huisman, J.A.; Kumbhar, P.; Vereecken, H.; van der Kruk, J. Three-dimensional imaging of subsurface structural patterns using quantitative large-scale multiconfiguration electromagnetic induction data. Water Resour. Res. 2014, 50, 2732–2748. [Google Scholar] [CrossRef] [Green Version]
- Abdu, H.; Robinson, D.; Jones, S. Comparing Bulk Soil Electrical Conductivity Determination Using the DUALEM-1S and EM38-DD Electromagnetic Induction Instruments. Soil Sci. Soc. Am. J. 2007, 71, 189–196. [Google Scholar] [CrossRef]
- Sudduth, K.; Drummond, S.; Kitchen, N. Accuracy issues in electromagnetic induction sensing of soil electrical conductivity for precision agriculture. Comput. Electron. Agric. 2001, 31, 239–264. [Google Scholar] [CrossRef]
- Huang, J.; Minasny, B.; Whelan, B.M.; McBratney, A.; Triantafilis, J. Temperature-dependent hysteresis effects on EM induction instruments: An example of single-frequency multi-coil array instruments. Comput. Electron. Agric. 2017, 132, 76–85. [Google Scholar] [CrossRef]
- Robinson, D.; Lebron, I.; Lesch, S.M.; Shouse, P. Minimizing Drift in Electrical Conductivity Measurements in High Temperature Environments using the EM-38. Soil Sci. Soc. Am. J. 2004, 68, 339–345. [Google Scholar] [CrossRef] [Green Version]
- Mester, A.; Zimmermann, E.; Van Der Kruk, J.; Vereecken, H.; Van Waasen, S. Development and drift-analysis of a modular electromagnetic induction system for shallow ground conductivity measurements. Meas. Sci. Technol. 2014, 25, 055801. [Google Scholar] [CrossRef]
- Hanssens, D.; Van De Vijver, E.; Waegeman, W.; Everett, M.E.; Moffat, I.; Sarris, A.; De Smedt, P. Ambient temperature and relative humidity–based drift correction in frequency domain electromagnetics using machine learning. Near Surf. Geophys. 2021, 19, 541–556. [Google Scholar] [CrossRef]
- Tan, X.; Mester, A.; Von Hebel, C.; Zimmermann, E.; Vereecken, H.; Van Waasen, S.; Van Der Kruk, J. Simultaneous calibration and inversion algorithm for multiconfiguration electromagnetic induction data acquired at multiple elevations. Geophysics 2019, 84, EN1–EN14. [Google Scholar] [CrossRef]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Rorabaugh, C.B. Digital Filter Designer’s Handbook: Featuring C Routines; McGraw-Hill: New York, NY, USA, 1993; pp. 93–108. [Google Scholar]
- Li, T. Digital Signal Processing Fundamentals and Applications; Elsevier Inc.: Decatur, GA, USA, 2008. [Google Scholar]
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | τ (s) | G (mSm−1K−1) | NL | RMSE1 (mSm−1K−1) | RMSE2 (mSm−1K−1) |
|---|---|---|---|---|---|
| 1 | 1201.10 | 2.27 | 1.17 | 0.36 | 0.37 |
| 2 | 1176.82 | 2.36 | 1.05 | 0.39 | 0.42 |
| 3 | 1038.07 | 2.25 | 1.18 | 0.40 | 0.47 |
| 4 | 968.33 | 2.23 | 1.22 | 0.40 | 0.64 |
| 5 | 1198.90 | 2.25 | 1.18 | 0.41 | 0.46 |
| 6 | 1076.17 | 2.25 | 1.19 | 0.31 | 0.32 |
| 7 | 1121.04 | 2.25 | 1.08 | 0.31 | 0.42 |
| 8 | 1038.55 | 2.24 | 1.24 | 0.44 | 0.59 |
| 9 | 1147.57 | 2.28 | 1.25 | 0.39 | 0.48 |
| 10 | 1154.75 | 2.26 | 1.16 | 0.56 | 0.61 |
| 11 | 1122.22 | 2.26 | 1.21 | 0.39 | 0.39 |
| 12 | 1041.29 | 2.26 | 1.22 | 0.37 | 0.47 |
| 13 | 1152.85 | 2.25 | 1.18 | 0.55 | 0.57 |
| 14 | 1007.87 | 2.29 | 1.25 | 0.37 | 0.41 |
| 15 | 1177.05 | 2.32 | 1.29 | 0.53 | 0.63 |
| 16 | 1104.52 | 2.26 | 1.20 | 0.48 | 0.49 |
| median | 1107.94 | 2.27 | 1.19 | ||
| std | 71.78 | 0.03 | 0.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tazifor, M.; Zimmermann, E.; Huisman, J.A.; Dick, M.; Mester, A.; Van Waasen, S. Model-Based Correction of Temperature-Dependent Measurement Errors in Frequency Domain Electromagnetic Induction (FDEMI) Systems. Sensors 2022, 22, 3882. https://0-doi-org.brum.beds.ac.uk/10.3390/s22103882
Tazifor M, Zimmermann E, Huisman JA, Dick M, Mester A, Van Waasen S. Model-Based Correction of Temperature-Dependent Measurement Errors in Frequency Domain Electromagnetic Induction (FDEMI) Systems. Sensors. 2022; 22(10):3882. https://0-doi-org.brum.beds.ac.uk/10.3390/s22103882
Chicago/Turabian StyleTazifor, Martial, Egon Zimmermann, Johan Alexander Huisman, Markus Dick, Achim Mester, and Stefan Van Waasen. 2022. "Model-Based Correction of Temperature-Dependent Measurement Errors in Frequency Domain Electromagnetic Induction (FDEMI) Systems" Sensors 22, no. 10: 3882. https://0-doi-org.brum.beds.ac.uk/10.3390/s22103882