1. Introduction
With the advent of the ubiquitous environment, new ubiquitous positioning systems have emerged. This is due to the fact that in wireless technologies and mobile computing environments, information from a sensor network is meaningful only when the physical location of the information source is determined [
1]. Ubiquitous positioning systems should be available not only for outdoor positioning but also indoor positioning environments. The drawbacks of the global positioning system (GPS), one of the most widely used positioning systems, are mispositioning in urban areas incorporating tall buildings [
2] and even worse performance in indoor environments. There have been many efforts made to enhance the system, especially for indoor environments, for example, augmentation with an inertial navigation system (INS) or [“pseudo-satellite”] system [
3,
4]. Radio frequency identification (RFID), one of the suitable technologies for those purposes, also has been used to augment the system [
5].
RFID technology uses electromagnetic energy as a medium for sending information; its two basic elements are a reader, which is connected to a host computer, and a tag. The basic concept is that the tag contains data that can be retrieved over the air by the interrogator [
6]. RFID tags can be categorized as either passive or active. A passive RFID tag can operate without a power supply by reflecting an RF signal transmitted to it from the reader. In contrast, an active RFID tag requires a power supply and transmits an RF signal. Generally, a passive tag is cheaper and structurally simpler than an active tag, but the active tag provides more detection range [
7]. RFID is a powerful technology, not only for automated inspection/identification of products, but also for augmenting conventional positioning systems [
8,
9]. If tags are attached at several known locations, an RFID reader can communicate with them, and the position of the reader, thereby, can be determined. However, the tag-installing space, which is affected mainly by the detection range of the conducted tag, is an important issue, having a decisive impact on both positioning accuracy and economy.
In an RFID-based positioning system, positions can be determined using the
k nearest neighbor (
k-NN) algorithm [
7,
10-
12]. The
k-NN algorithm has been applied also to other positioning systems such as wireless local area networks (WLAN) based positioning systems [
13,
14]. In
k-NN positioning, the location of a reader can be calculated with
k-detected reference tags the coordinates of which are known and contributed to the final value in the signal strength domain.
The objective of this study was to calculate the optimal detection range of an RFID-based positioning system in which the
k-NN algorithm is used to determine the position of a moving reader. In other words, the optimal interval of RFID distribution for
k-NN-based positioning was derived. However, for economical reasons, not all of the RFID tags produced are designed to provide signal strength information. Instead, they simply indicate whether a tag is detected or not within the given detection range. Moreover, the inconsistency of signal strength reception, caused by multipath and interference in the presence of obstacles, is a practical problem in
k-NN-based positioning [
7,
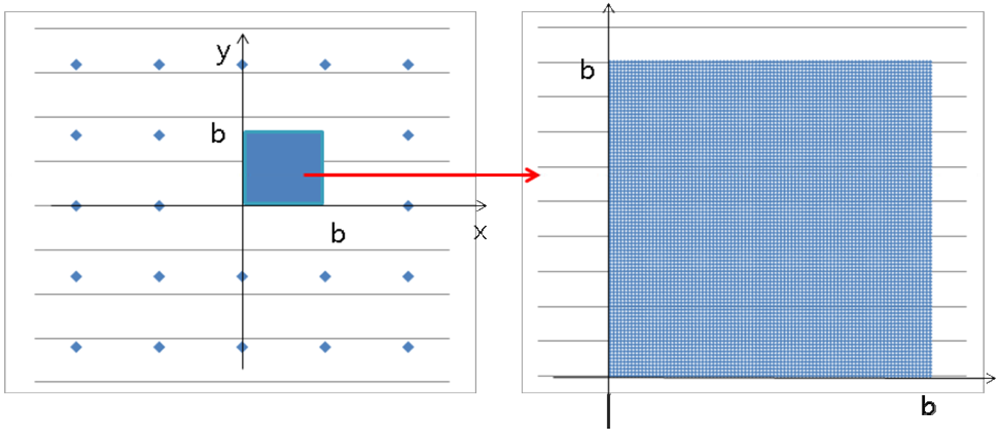
15]. Thus, in the present study, it was assumed that no signal strength information is given. Also, reference tags were assumed to be regularly distributed in 1-dimensional, 2-dimensional and 3-dimensional spaces corresponding to various environments in the real world.
4. Validation of Optimal Detection Range of RFID-based Positioning System
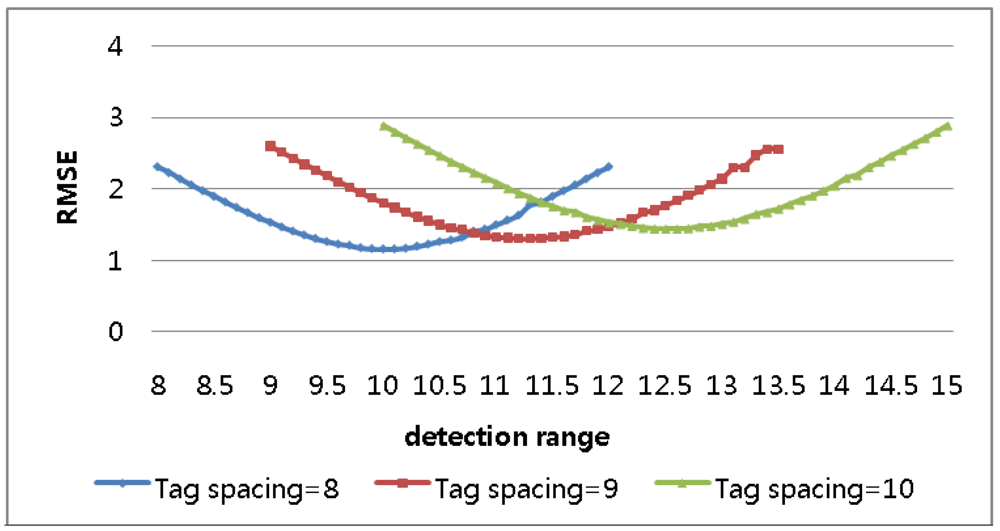
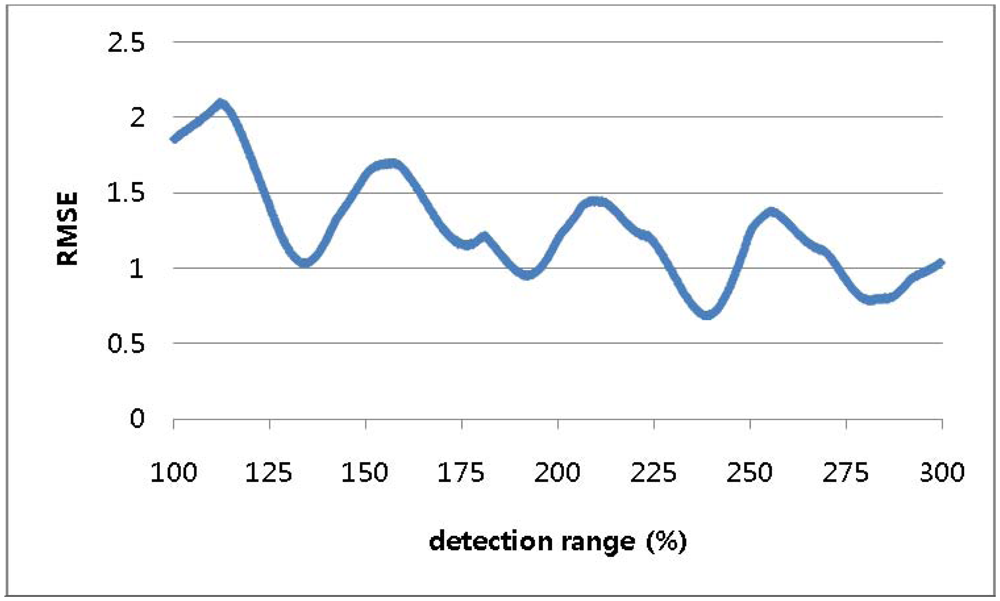
Table 5 shows the optimal detection ranges of the RFID-based positioning system. The range was 125% of the tag-spacing distance in 1-dimensional space, 134% in 2-dimensional space, and 143% in 3-dimensional space.
To verify these results, random routes with 1,000 points were generated in the 1-dimensional, 2-dimensional and 3-dimensional spaces and tag spacing was set to 10 in each case.
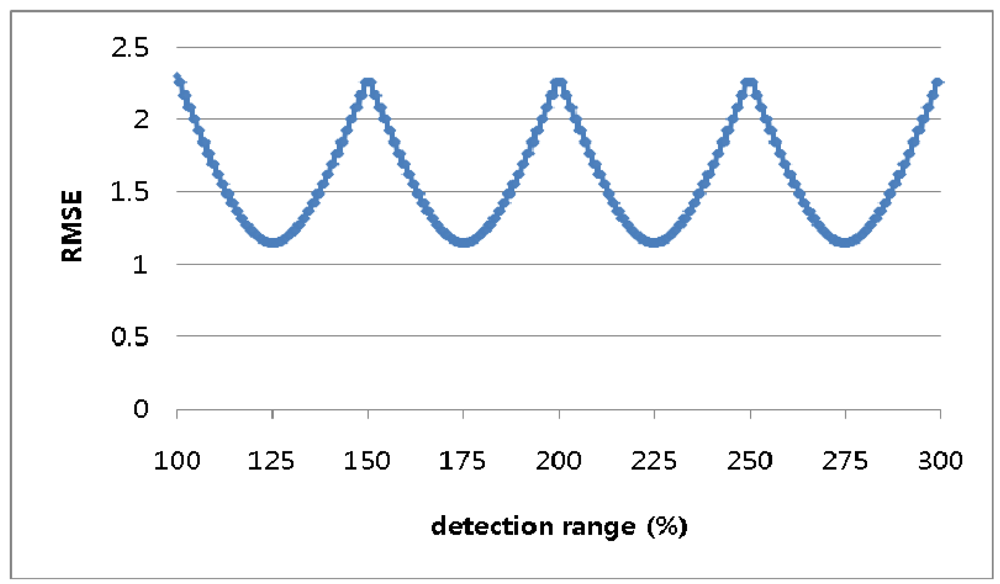
Figure 15 shows the random route in the 1-dimesional space, and
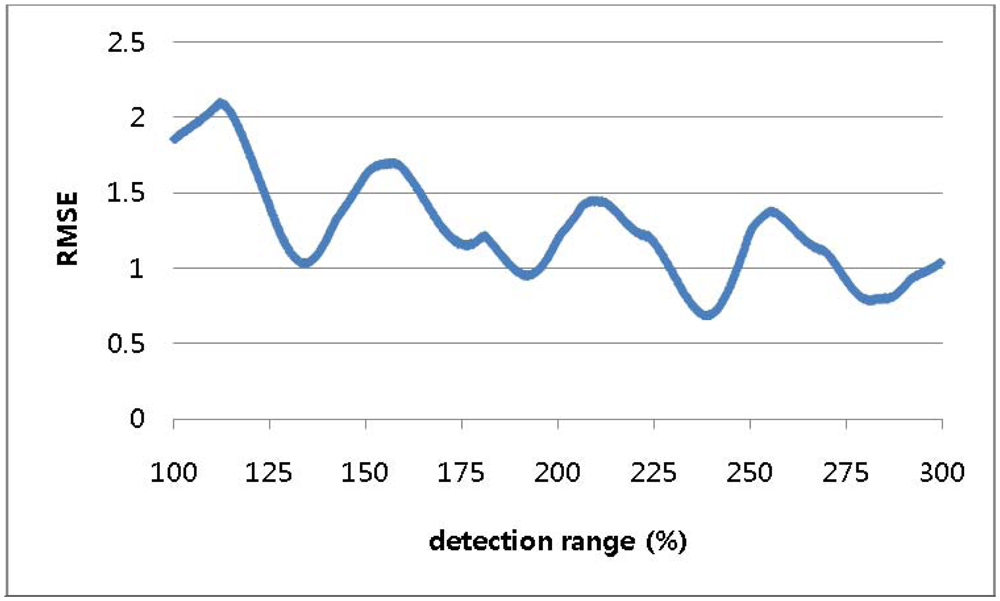
Figure 16 shows the optimal detection range for the random route in that space, which range was 125% of the tag-spacing distance.
Figures 17 and
19 show the random routes in the 2- and 3-dimensional spaces, and
Figures 18 and
20 show the optimal detection ranges, which were 134% of the tag-spacing distance in the 2-dimensional space and 143% in the 3-dimensional space, respectively. The results were consistent with those in the analytical and numerical approaches. So, the optimal detection range for each dimension was validated.
5. Conclusions and Future Study
With the advent of ubiquitous computing environments, positioning technology has become more and more important and essential, the RFID-based positioning system using the k-NN algorithm being one of the popular technologies. For the purposes of economy, the system was devised without provision for signal strength information. In the present study, the optimal detection ranges were determined for 1-dimensional, 2-dimensional and 3-dimensional spaces. The optimal detection range is 125% of the tag-spacing distance in 1-dimensional space, 134% in 2-dimensional space and 143% in 3-dimensional space. These results can be used as the basis for the design of RFID-based positioning systems and other applications using the k-NN algorithm. For example, supposing that the tag detection range is 15 m, the optimal tag interval would be 12 m in 1-dimensional space, 11 m in 2-dimensional space and 10 m in 3-dimensional space. However, in real applications, not even the distribution of tags will always be guaranteed under some conditions, as obstacles sometimes occupy the locations at which tags should be installed. Even for such cases, the present study offers a methodology for evaluating the performance of a positioning system by providing simulated RMSE between the true and estimated positions from the system.
There are additional factors to be considered, such as the detection rate for tags, the varying detection ranges of an RFID reader and signal strength information, before an accurate RFID-based positioning system design can be achieved. In future studies, tags will be installed on the basis of the findings in the present study, and will be minutely tuned and integrated with tracking simulations.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}