Development of a Prototype Miniature Silicon Microgyroscope

Abstract
:1. Introduction
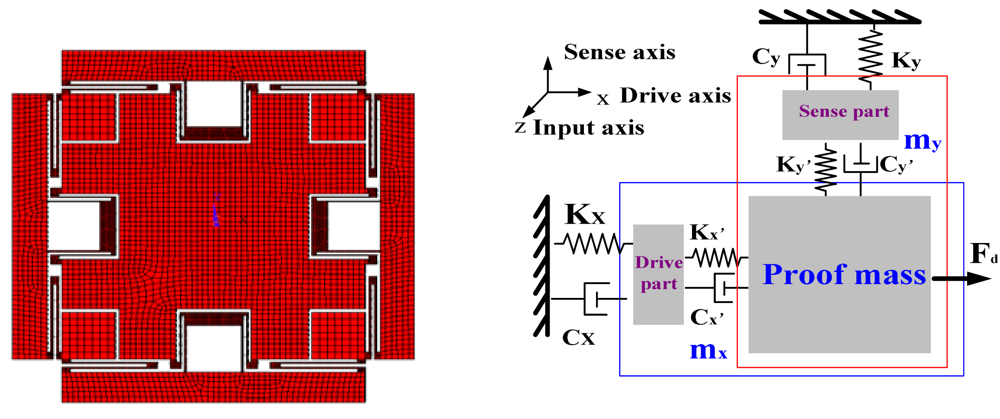
2. Design of the SMG Structure
- The drive component is driven as steadily as possible to ensure the drive frequency and vibrating amplitude are both stable and constant.
- Due to the Coriolis effect, the Coroilis force along the sense direction is generated when a rotation happens in the perpendicular direction.
- Because the vibratory amplitude in sense mode is in direct proportion to the outer angular rate, the gyroscope can detect the corresponding angular rate through detecting the vibratory amplitude.
3. Design Schemes of the SMG in Drive and Sense Modes
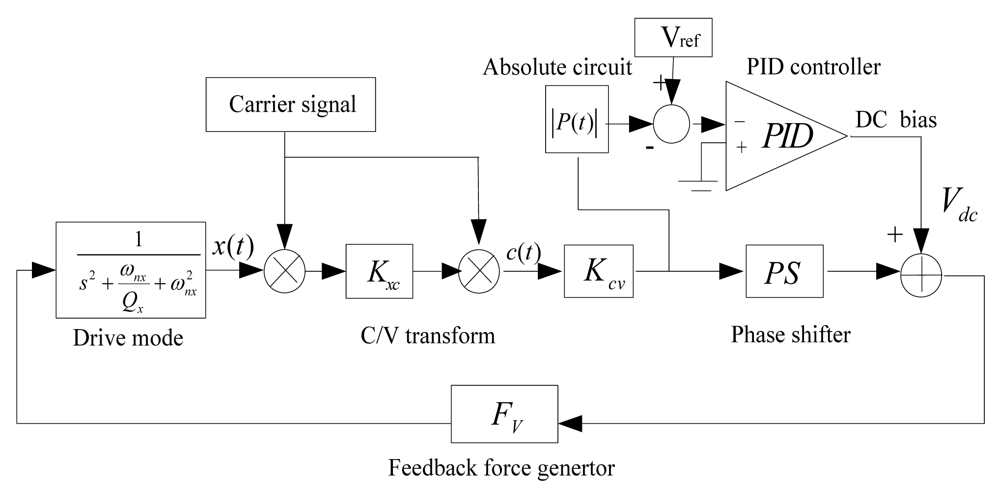
3.1. Self-Oscillating Scheme in Drive Mode
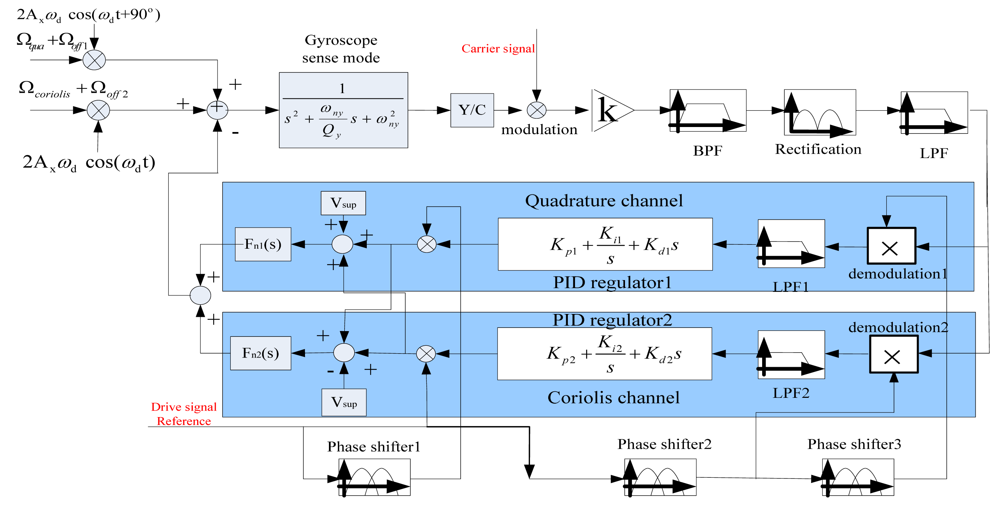
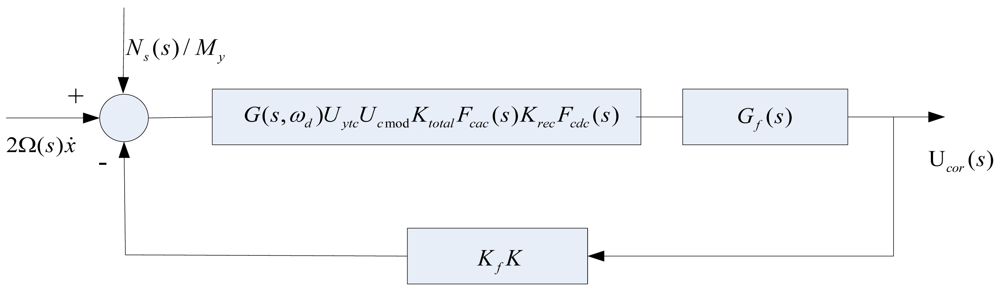
3.2. Dual-Channel Closed-Loop Detection of SMG
4. Digital Temperature Compensation
4.1. The Mechanism of the Temperature Effect
4.2. Establishment of the Compensation Model
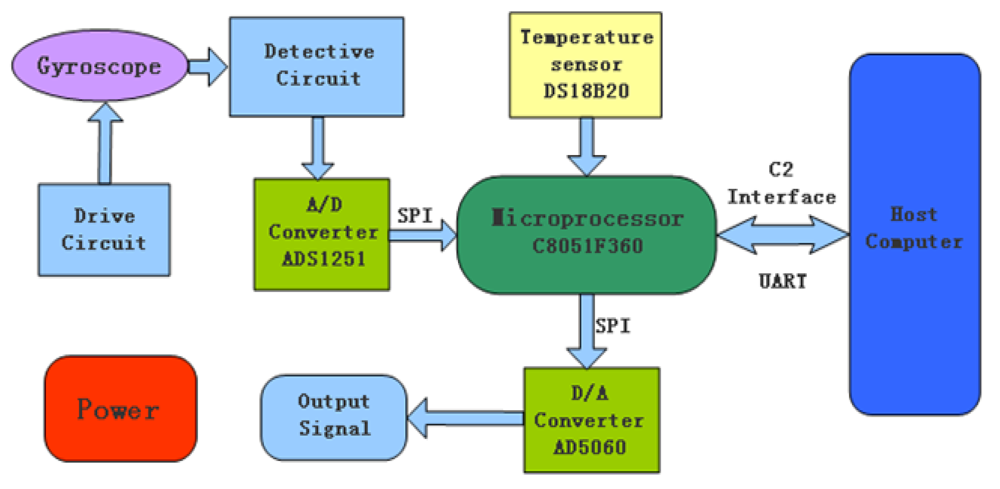
4.3. The Design of Temperature Compensation System
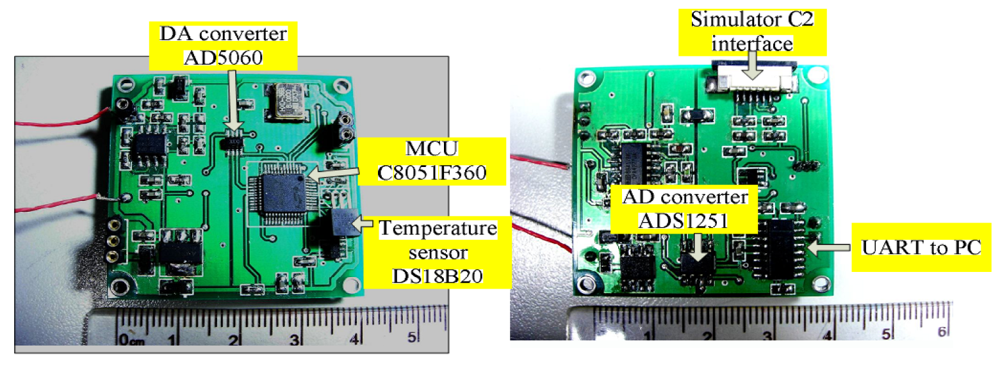
- DS18B20 is a kind of 1-wire digital temperature sensor, with a wide measuring range from -55 °C to +125 °C, 9 - 12 bit digital temperature readout, and accuracy of ±0.5 °C. In the design, 12 bit resolution is chosen, and 3.3 V power supply is applied. Data acquision (DQ) pin is connected to pin P1.6 of the C8051F360.
- Because the gyroscope signal is quite weak, a high-accuracy, wide dynamic range of 24-bit δ-Σ structure ADS1251 AD converter, which can achieve 19 bits of effective accuracy when its readout rate is up to 20 kHz, is ideal for this requirement. It is a single channel converter, with SO-8 seal, very small volume, and 2-wire serial interface, which can be directly connected to the microprocessor through a Serial Peripheral Interface (SPI).
- According to the analog output requirement of the system, after converted by A/D and then compensated in the microprocessor, the compensated digital signal should be transmitted out again through a D/A converter. In this design, AD5060 with a 3-wire serial interface, which can communicate with microprocessor by SPI, is used to achieve outputting gyroscope angular rate signal compensated. C8051F360 has only one SPI port, which has to be connected with both ADS1251 and AD5060. Apart from SCLK, different data pins of SPI are connected with each separate pin SDATA for data transmission respectively, even at the same time. Though ADS1251 and AD5060 use the same SPI interface of the microprocessor, there is no conflict between them because an optimal program will enable them to work orderly based on time-division-multiplexing. In addition, a special pin of AD5060 will be connected to the microprocessor, which is used to generate an interrupt request to inform that the data conversion is over. The AD5060 can achieve 16 bits of effective accuracy for D/A conversion.
- In order to facilitate the observation when debugging and recording data during the temperature experiments, the UART serial port is used to communicate with host computer in this design, port Tx and port Rx are configured respectively to the relevant pins of the microprocessor by using the overlapping switch function. The UC-5 debugging adapter (New Hualong Corporation) is connected to the debugging interface C2 of C8051F360 and an USB port connecter with the host computer is used to download the program to the internal flash memory of the C8051F360. A tiny-6 pin interface embedded in the printed circuit board (PCB) circuitry is connected to the standard 5 mm × 2 mm interface through a connector designed, which will realize not only downloading program conveniently in the debugging process, but also a reduction of area of the PCB and decreased volume in favor of miniaturization.
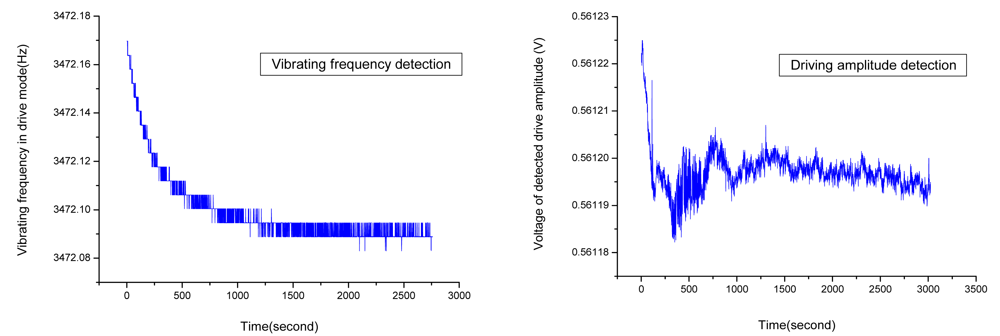
5. Experimental Results
6. Conclusions
Acknowledgments
References and Notes
- Sharma, A.; Zaman, M.F.; Ayazi, F. A 0.2°/hr micro-gyroscope with automatic CMOS mode matching. Proceedings of IEEE International Solid-State Circuits Conference, Digest of Technical Papers, San Francisco, CA, USA, December 2007; pp. 386–387.
- Kulygin, A.; Schmid, U.; Seidel, H. Characterization of a novel micromachined gyroscope under varying ambient pressure conditions. Sens. Actuat. A 2008, 145-146, 52–58. [Google Scholar]
- Li, Z.; Yang, Z.; Xiao, Z. A bulk micromachined vibratory lateral gyroscope fabricated with wafer bonding and deep trench etching. Sens. Actuat. 2000, 83, 24–29. [Google Scholar]
- Chang, B.S.; Kim, S.; Lee, J.G.; Kang, D.T.; Sung, W. Design and performance analysis of PLL based self oscillation loop in vibrating gyroscope. Proceedings of SPIE, San Jose, CA, USA, February 2005; pp. 1–6.
- Sharma, A.; Zaman, M.F.; Ayazi, F. A 104-dB dynamic range transimpedance-based CMOS ASIC for tuning fork microgyroscopes. IEEE J. Solid-State Circuits. 2007, 42, 1790–1802. [Google Scholar]
- Phani, A.S.; Seshia, A.A.; Palaniapan, M.; Howe, R.T.; Yasaitis, J.A. Modal coupling in micromechanical vibratory rate gyroscopes. IEEE Sensors J. 2006, 6, 1144–1152. [Google Scholar]
- Clark, W.A.; Howe, R.T. Surface micromachined Z-axis vibratory rate gyroscope. Proceedings of Solid-State Sensor and Actuator Workshop, Hilton Head Island, SC, USA, June 1996; pp. 283–287.
- Loveday, P.W.; Rogers, C.A. The influence of control system design on the performance of vibratory gyroscopes. J. Sound. Vib. 2002, 255, 417–432. [Google Scholar]
- Jiang, X. Capacitive position-sensing interface for micromachined inertial sensors. Ph.D. Dissertation, University of California, Berkeley, CA, USA, 2003. [Google Scholar]
- Petkov, V.P.; Boser, B.E. A fourth-order sigma-delta interface for micromachined inertial sensors. IEEE J. Solid-State Circuits 2005, 40, 1602–1609. [Google Scholar]
- Ezekwe, C.D.; Boser, B.E. A mode-matching ΣΔ closed-loop vibratory gyroscope readout interface with a 0.004 °/s/√Hz noise floor over a 50 Hz band. IEEE J. Solid-State Circuits 2008, 43, 3039–3048. [Google Scholar]
- Gaiβer, A.; Geiger, W.; Link, T.; Merz, J.; Steigmajer, S.; Hauser, A.; Sandmaier, H.; Lang, W.; Niklasch, N. New digital readout electronics for capacitive sensors by the example of micromachined gyroscopes. Sens. Actuat. A-Phys. 2002, 97-98, 557–562. [Google Scholar]
- Ferguson, M.I.; Keymenlen, D.; Peay, C; Yee, K. Effect of temperture on vibratory rate gyroscope. Proceedings of IEEE Aerospace Conference, Big Sky, MT, USA, March 2005; pp. 1–6.
- Shcheglov, K.; Evans, C.; Gutierrez, R.; Tang, T.K. Temperature dependent characteristics of the JPL silicon MEMS gyroscope. Proceedings of IEEE Aerospace Conference, Big Sky, MT, USA, March 2000; pp. 403–411.
- Geiger, W.; Butt, W.U.; Gaiβer, A.; French, J.; Braxmaier, M.; Link, T.; Kohne, A.; Nommensen, P.; Sandmaier, H.; Lang, W.; Sandmaier, H. Decoupled microgyros and the design principle DAVED. Sens. Actuat. A-Phys. 2002, 95, 239–249. [Google Scholar]
- Alper, S.E.; Emre, S.; Yuksel, T.; Tayfun, A. A compact angular rate sensor system using a fully decoupled silicon-on-glass MEMS gyroscope. J. Microelectromech. Syst. 2008, 17, 1418–1429. [Google Scholar]
- Park, S.; Horowitz, R. Adaptive control of the conventional mode of operation of MEMS gyroscopes. J. Microelectromech. Syst. 2003, 12, 101–108. [Google Scholar]
- Saukoski, M.; Aaltonen, L.; Halonen, K.A.I. Zero-rate output and quadrature compensation in vibratory MEMS gyroscopes. IEEE Sens. J. 2007, 7, 1639–1652. [Google Scholar]
- Yeh, B.Y.; Liang, Y.C. Mathematical modelling on the quadrature error of low-rate microgyroscope for aerospace applications. Analog. Integr. Circuit. Signal. 2001, 29, 85–94. [Google Scholar]
- Nguyen, C.T.-C.; Howe, R.T. An integrated CMOS micromechanical resonator high-Q oscillator. IEEE J. Solid-State Circuits 1999, 34, 440–455. [Google Scholar]
- M'Closkey, R.T.; Vakakis, A. Analysis of a microsensor automatic gain control loop. Proceedings of the American Control Conference, San Diego, CA, USA, June 1999; pp. 3307–3311.
- Sun, X.; Horowitz, R.; Komvopoulos, K. Stability and resolution analysis of a phase-locked loop natural frequency tracking system for MEMS fatigue testing. J. Dyn. Syst. Meas. Contr. 2002, 124, 599–605. [Google Scholar]
- Saukoski, M.; Aaltonen, L.; Salo, T.; Halonen, K. Integrated readout and control electronics for a microelectromechanical angular velocity sensor. Proceedings of the 32nd European Solid-State Circuits Conference, Montreux, Switzerland, September 2006; pp. 243–246.
- Xia, D.Z.; Zhou, B.L.; Wang, S.R. Design and testing analysis of double closed loop vacuum silicon microgyroscope. Chin. J. Sens. Actuat. 2008, 21, 241–243. [Google Scholar]
- Xia, D.Z.; Zhou, B.L. The design of silicon micromechanical Z–axis gyroscope closed-loop servo control System. Chin. J. Meas. Contr. Tech. 2007, 26, 1–6. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
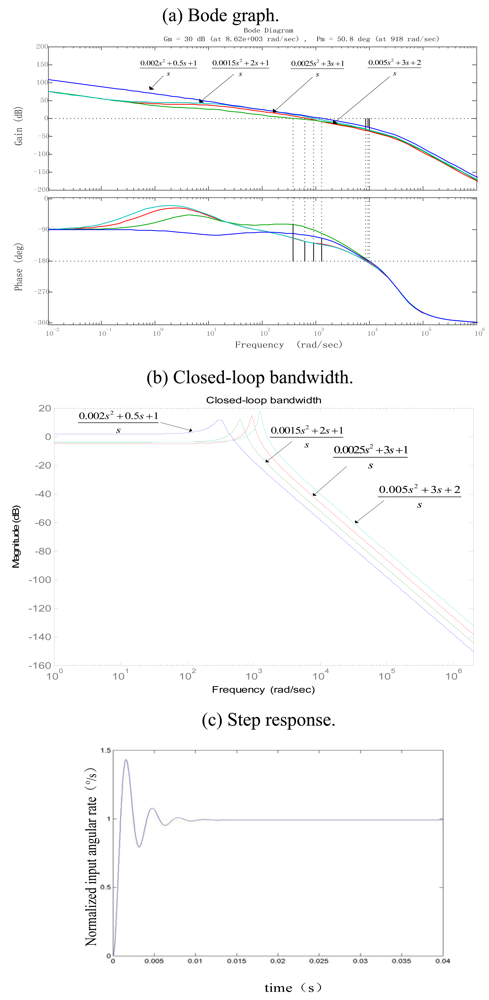
| PID compensator parameters | ||||
|---|---|---|---|---|
| Kp | 0.5 | 2 | 3 | 3 |
| Ti (s) | 0.5 | 2 | 0.3 | 1.5 |
| τ (s) | 0.004 | 0.0075 | 0.0025 | 0.0025 |
| Simulated bandwidth (Hz) | 60 | 99.8 | 146 | 205 |
| Technical data | Value | |
|---|---|---|
| Performance(+25 °C) | Scale factor | 9.6 mV/°/s |
| Bias stability | 15 °/h | |
| Noise | 0.0024°/s/√Hz | |
| Noise equivalent rate | 0.01°/s | |
| Dynamic range | ± 300°/s | |
| The minimum measurable angular rate | 0.02°/s | |
| Linearity | ≤ 400 ppm | |
| Bandwidth | > 80 Hz | |
| Power supply | Supply voltage | ± 5 V |
| Current dissipation | 20 mA | |
| Environment(-40 °C∼ + 80 °C) | Bias stability | 3°/s |
| Shock survival | 1000 g | |
| Temperature drift | < 0.03°/s/°C | |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Xia, D.; Chen, S.; Wang, S. Development of a Prototype Miniature Silicon Microgyroscope. Sensors 2009, 9, 4586-4605. https://0-doi-org.brum.beds.ac.uk/10.3390/s90604586
Xia D, Chen S, Wang S. Development of a Prototype Miniature Silicon Microgyroscope. Sensors. 2009; 9(6):4586-4605. https://0-doi-org.brum.beds.ac.uk/10.3390/s90604586
Chicago/Turabian StyleXia, Dunzhu, Shuling Chen, and Shourong Wang. 2009. "Development of a Prototype Miniature Silicon Microgyroscope" Sensors 9, no. 6: 4586-4605. https://0-doi-org.brum.beds.ac.uk/10.3390/s90604586