The Influence of Individual Differences on Diverging Behavior at the Weaving Sections of an Urban Expressway



Abstract
:1. Introduction
2. Literature Review
2.1. Risk Factors of Traffic Accidents at Weaving Sections
2.2. Characteristics of Driving Behavior at Weaving Sections
2.3. Classification of Driver Type
3. Methodology
3.1. Survey and Respondents
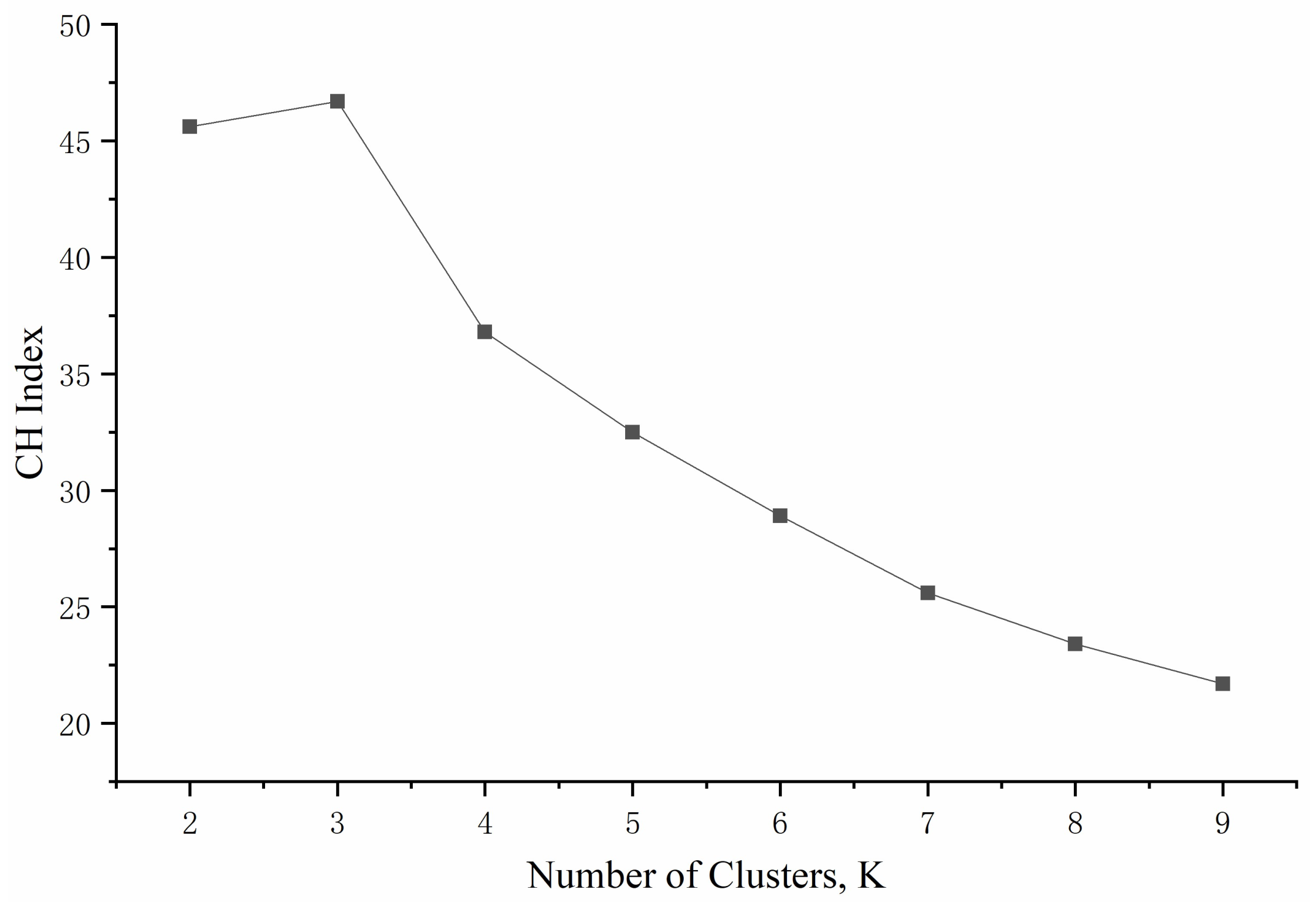
3.2. Factor Analysis and Cluster Analysis of Driver Classification
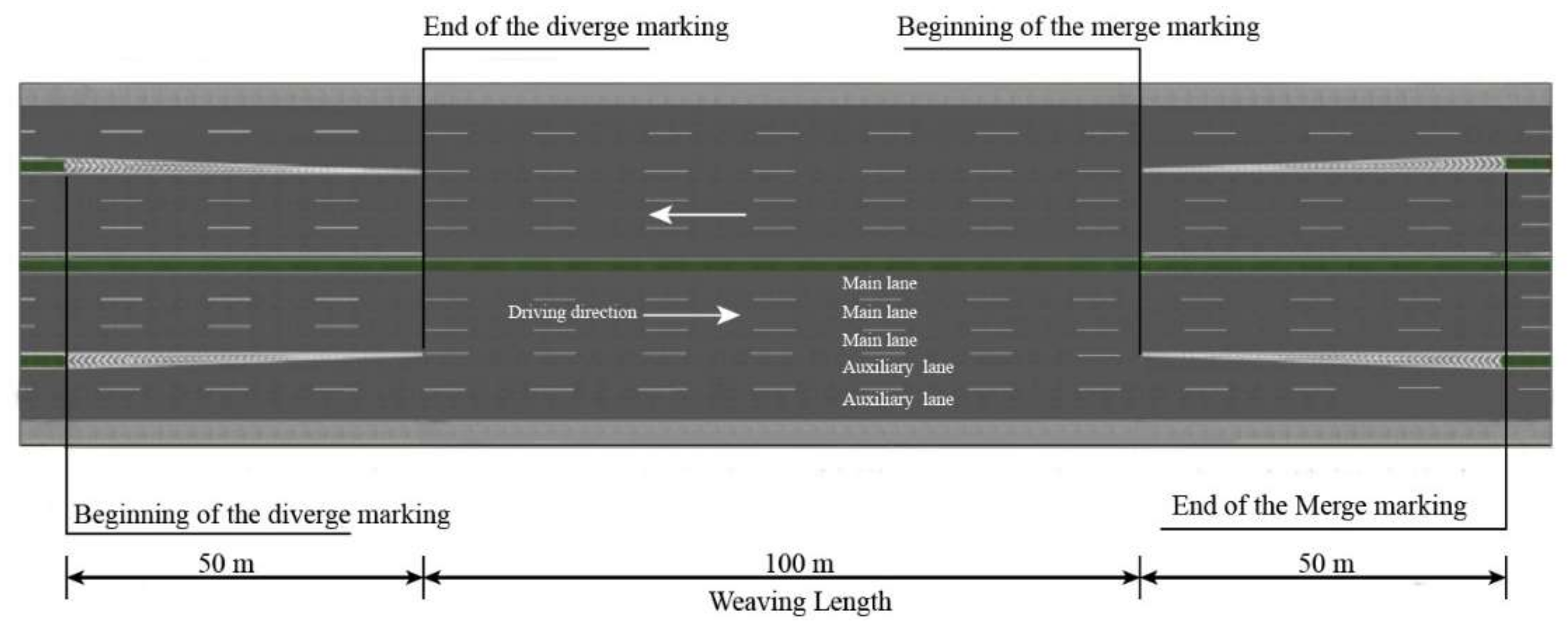
3.3. Experimental Scene Development
3.4. Participants and Experimental Procedure
4. Data Analysis and Result
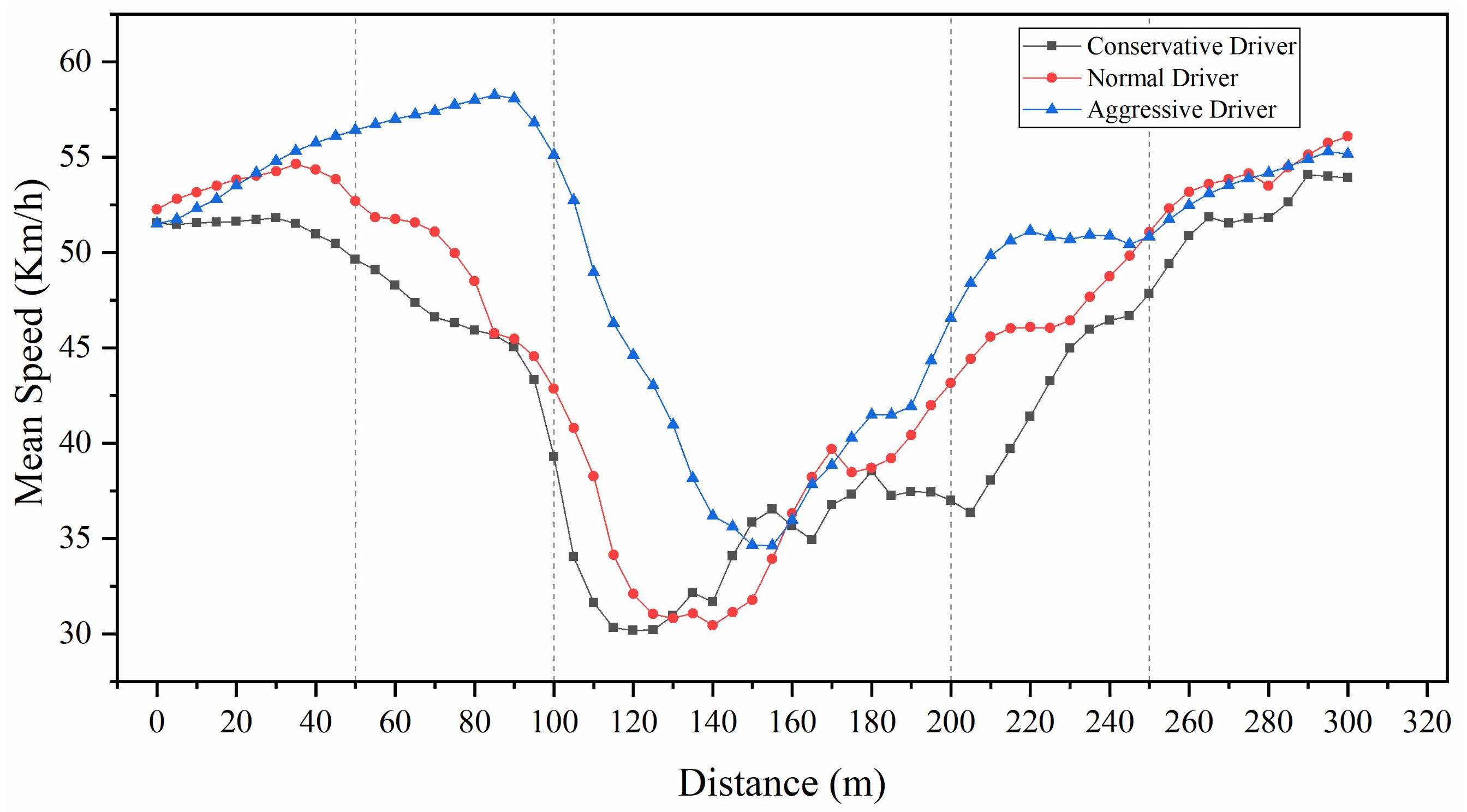
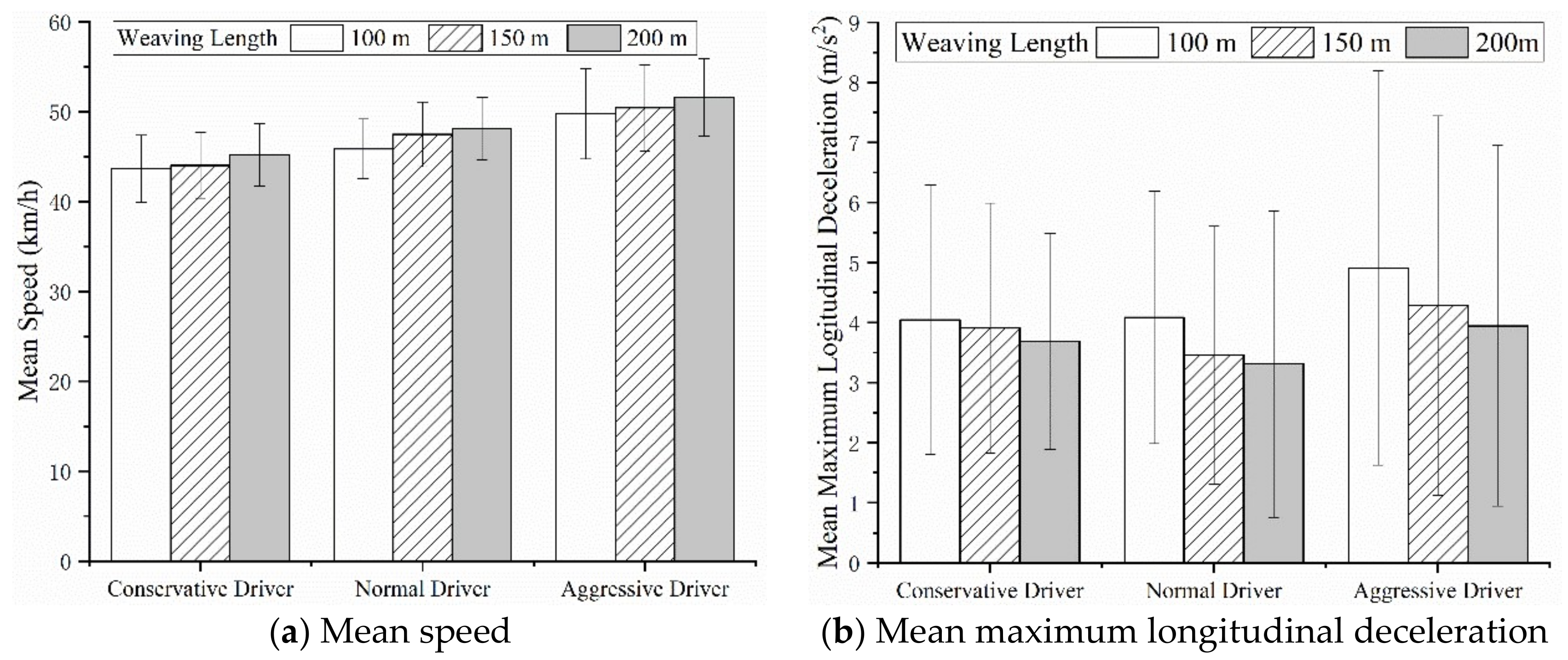
4.1. Mean Speed
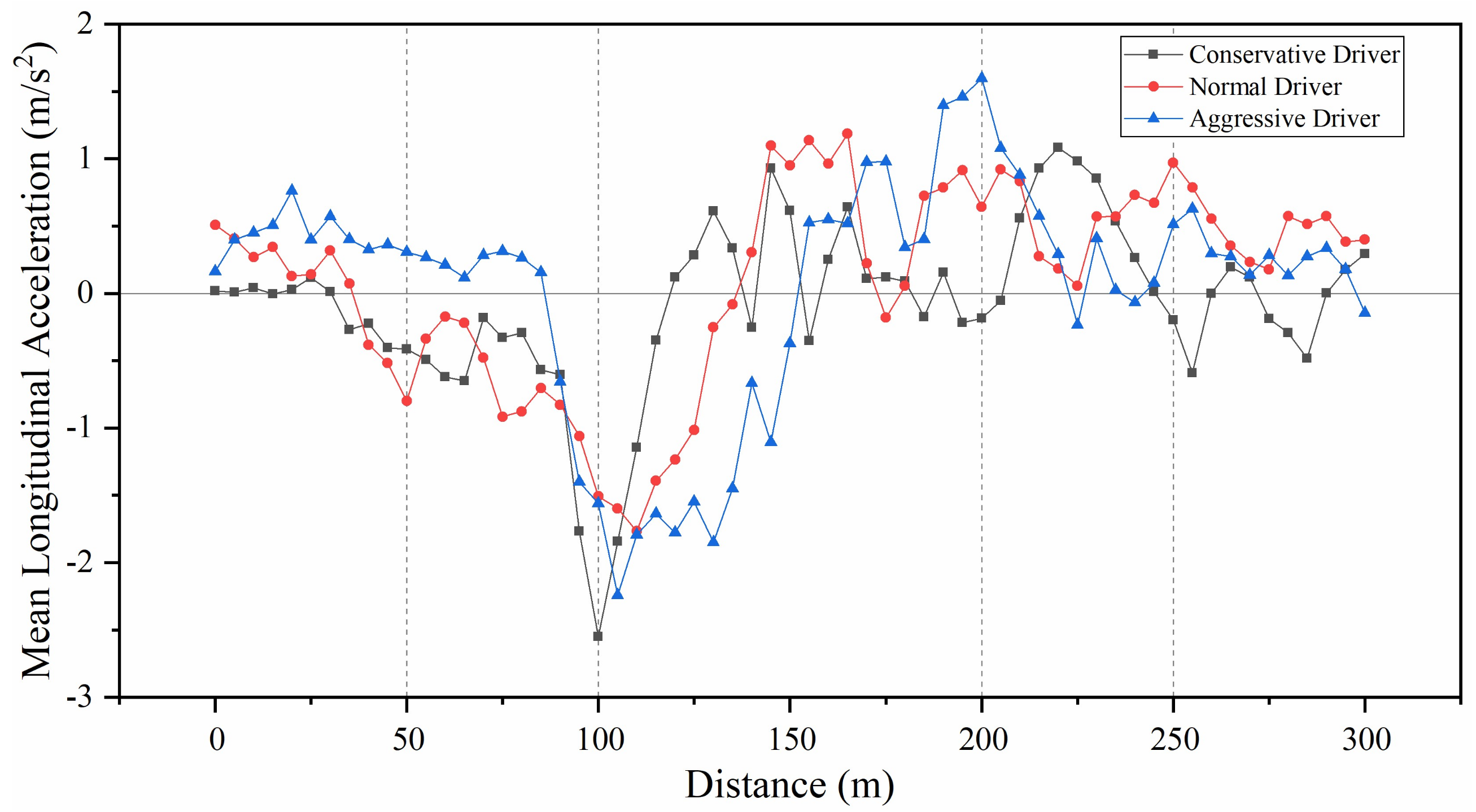
4.2. Mean Longitudinal Acceleration
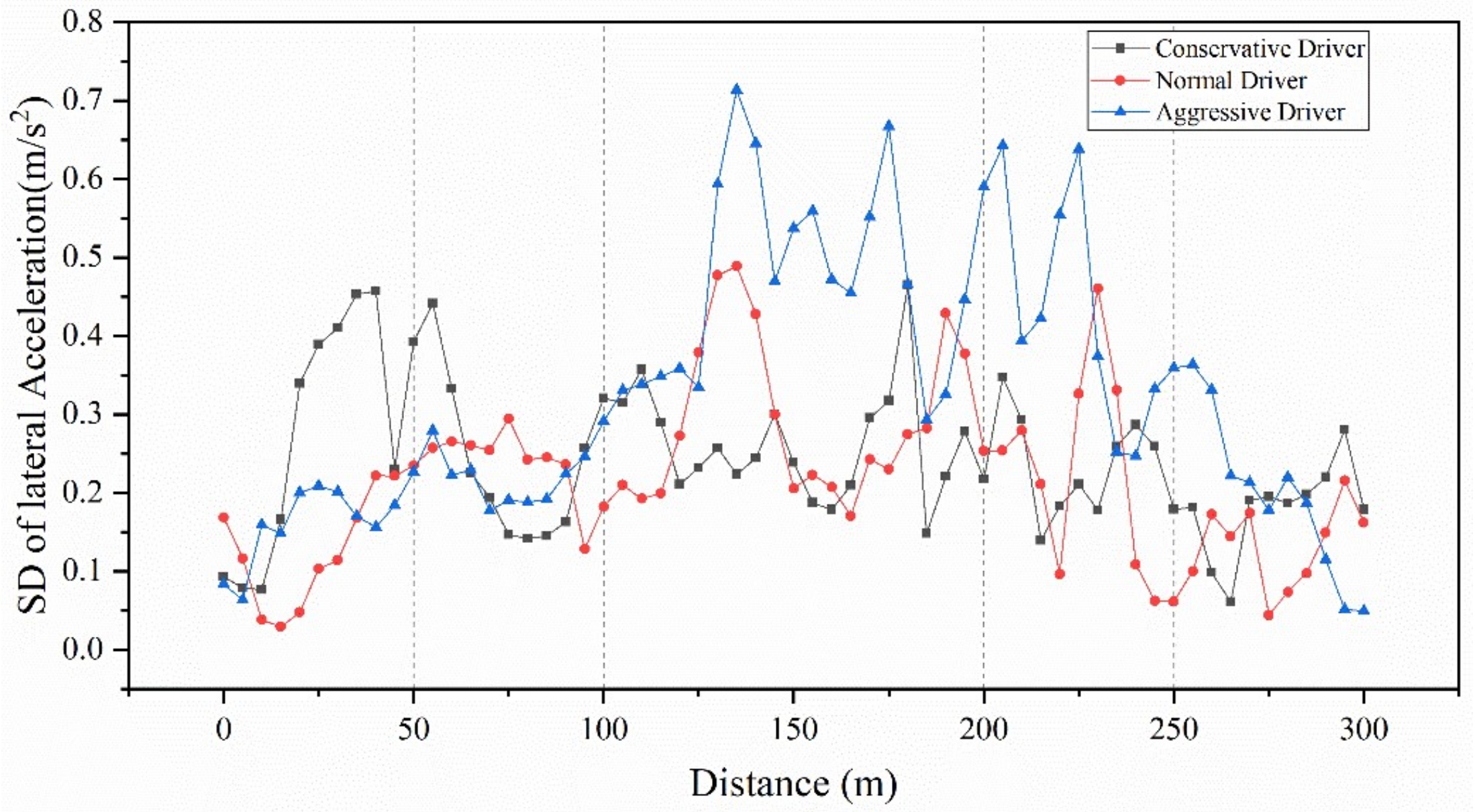
4.3. SD of Lateral Acceleration
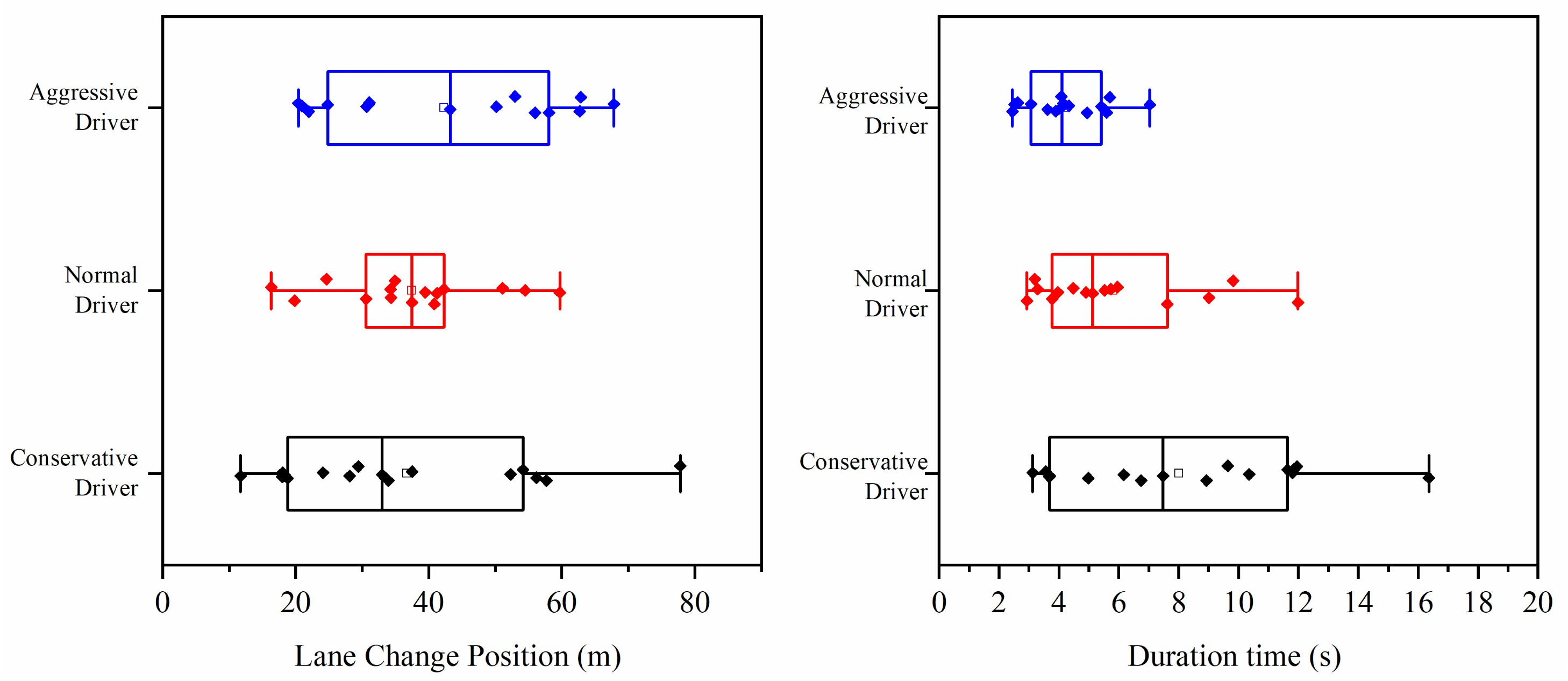
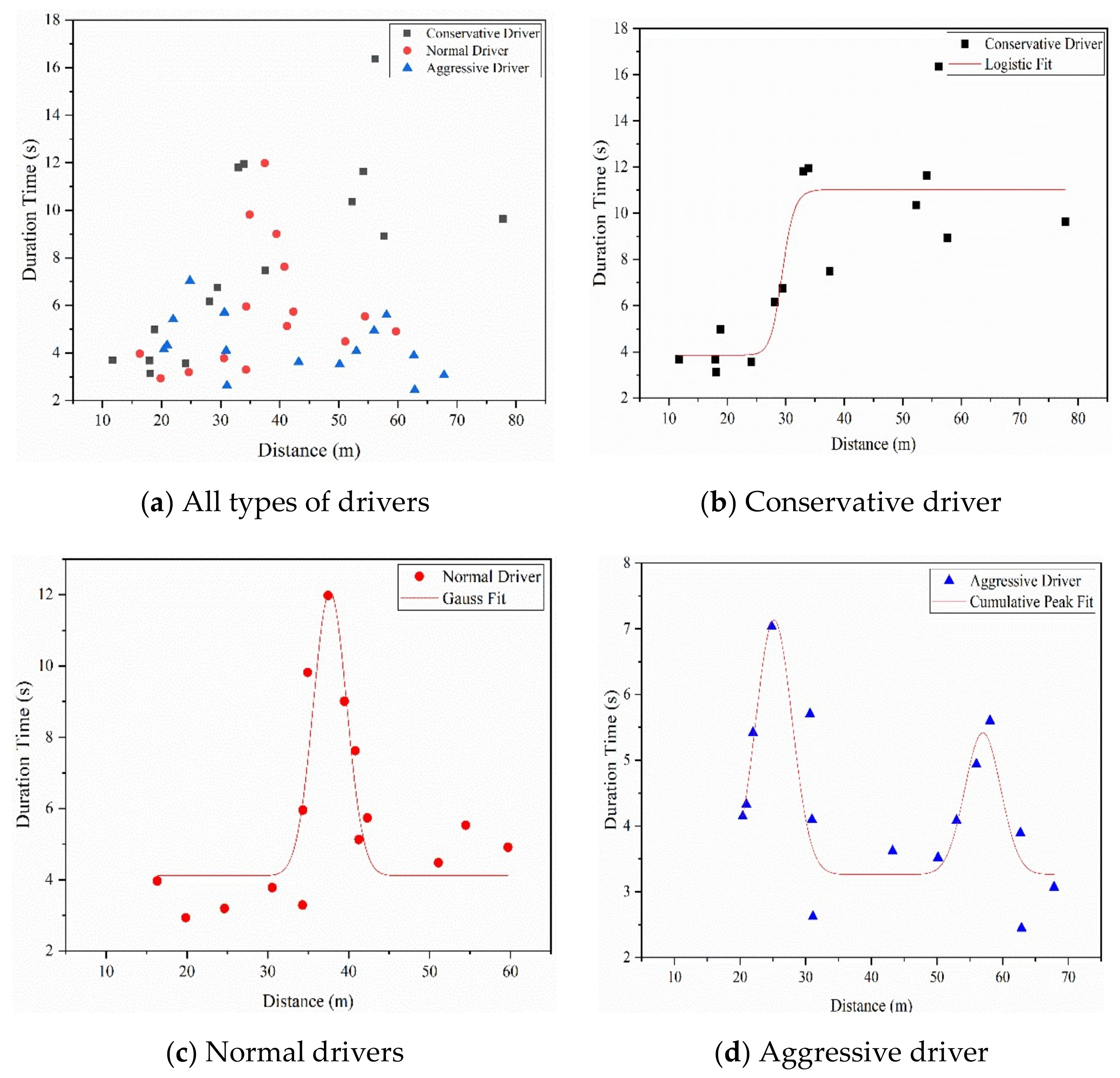
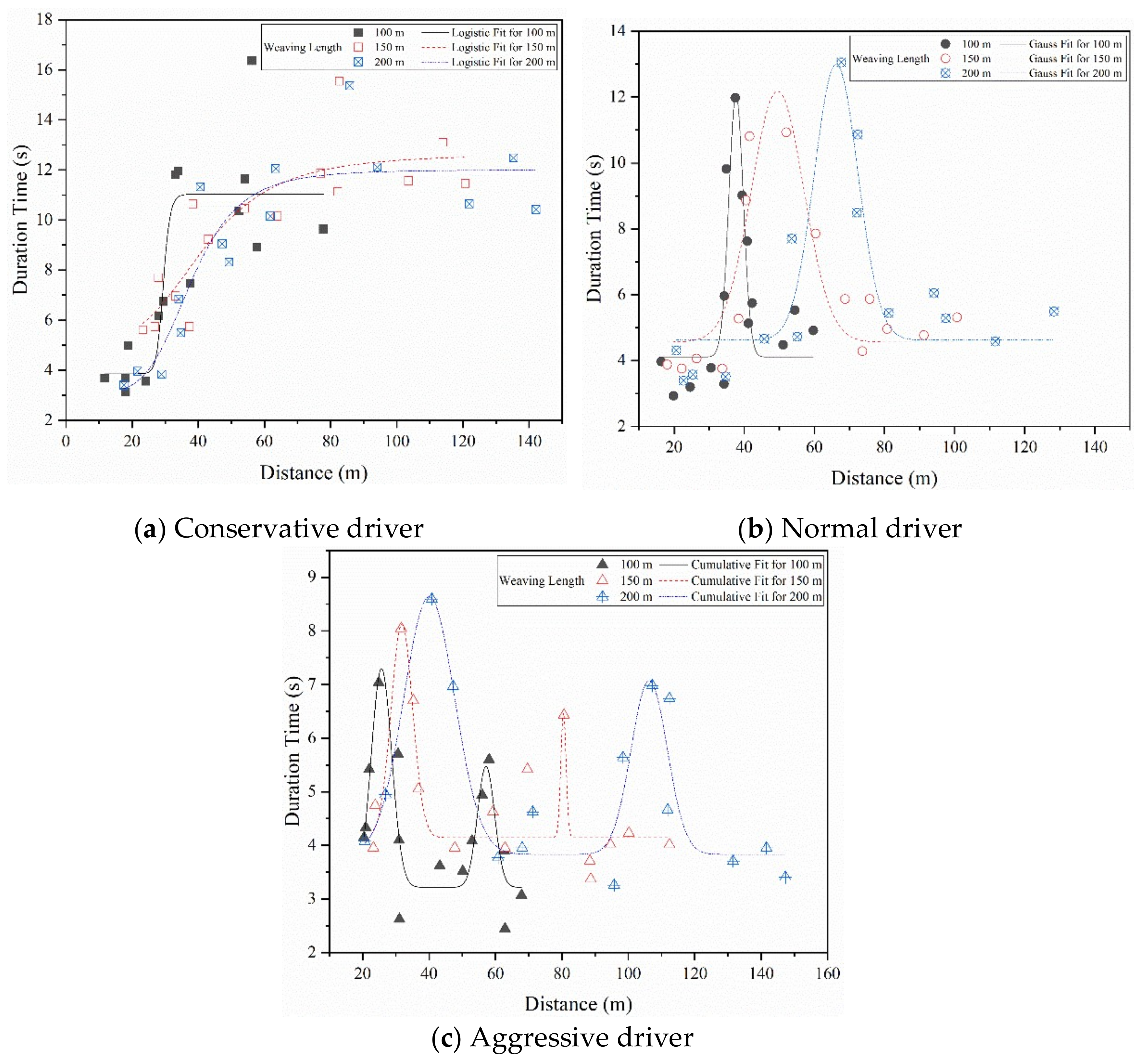
4.4. Lane-Change Position and Duration Time
5. Discussion
5.1. Mean Speed and Mean Maximum Longitudinal Deceleration
5.2. Lane Change Position and Duration
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Golob, T.F.; Recker, W.W.; Alvarez, V.M. Safety aspects of freeway weaving sections. Transp. Res. Part A Policy Pract. 2004, 38, 35–51. [Google Scholar] [CrossRef] [Green Version]
- Hidas, P. Modelling vehicle interactions in microscopic simulation of merging and weaving. Transp. Res. Part C Emerg. Technol. 2005, 13, 37–62. [Google Scholar] [CrossRef]
- Mao, X.; Yuan, C.; Gan, J.; Zhang, S. Risk factors affecting traffic accidents at urban weaving sections: Evidence from China. Int. J. Environ. Res. Public Health 2019, 16, 1542. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Z.; Chen, Y.; Chen, N.; Han, W. A Control Strategy of Urban Expressway under CVIS. Int. J. Simul. Syst. Sci. Technol. 2016, 17. [Google Scholar] [CrossRef]
- Ali, Y.; Haque, M.M.; Zheng, Z.; Washington, S.; Yildirimoglu, M. A hazard-based duration model to quantify the impact of connected driving environment on safety during mandatory lane-changing. Transp. Res. Part C Emerg. Technol. 2019, 106, 113–131. [Google Scholar] [CrossRef]
- Luo, J.; Zeng, X.; Chen, Y.; Sun, D.J. Determining acceleration lane length on expressway weaving area using microscopic traffic simulation. In International Symposium for Intelligent Transportation and Smart City; Springer: Singapore, May 2019; pp. 13–27. [Google Scholar]
- Hao, W.; Zhang, Z.; Gao, Z.; Yi, K.; Liu, L.; Wang, J. Research on mandatory lane-changing behavior in highway weaving sections. J. Adv. Transp. 2020. [Google Scholar] [CrossRef]
- Rong, J.; Mao, K.; Ma, J. Effects of individual differences on driving behavior and traffic flow characteristics. Transp. Res. Rec. 2011, 2248, 1–9. [Google Scholar] [CrossRef]
- Hill, C.; Elefteriadou, L.; Kondyli, A. Exploratory analysis of lane changing on freeways based on driver behavior. J. Transp. Eng. 2015, 141, 04014090. [Google Scholar] [CrossRef]
- Lyu, N.; Cao, Y.; Wu, C.; Xu, J.; Xie, L. The effect of gender, occupation and experience on behavior while driving on a freeway deceleration lane based on field operational test data. Accid. Anal. Prev. 2018, 121, 82–93. [Google Scholar] [CrossRef]
- Cirillo, J.A. The relationship of accidents to length of speed-change lanes and weaving areas on interstate highways. Highw. Res. Rec. 1970, 312, 17–32. [Google Scholar]
- Fazio, J.; Holden, J.; Rouphail, N.M. Use of freeway conflict rates as an alternative to crash rates in weaving section safety analyses. Transp. Res. Rec. 1993, 1401, 61. [Google Scholar]
- Glad, R.W. Weave Analysis and Performance: The Washington State Case Study; No. WA-RD 515.1; Washington State Department of Transportation: Olympia, WA, USA, 2001.
- Pulugurtha, S.S.; Bhatt, J. Evaluating the role of weaving section characteristics and traffic on crashes in weaving areas. Traffic Inj. Prev. 2010, 11, 104–113. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Abdel-Aty, M.; Shi, Q.; Park, J. Real-time crash prediction for expressway weaving segments. Transp. Res. Part C Emerg. Technol. 2015, 61, 1–10. [Google Scholar] [CrossRef]
- Penmetsa, P.; Pulugurtha, S.S. Modeling crash injury severity by road feature to improve safety. Traffic Inj. Prev. 2018, 19, 102–109. [Google Scholar] [CrossRef]
- Skabardonis, A.; Kim, A.M. Weaving Analysis, Evaluation and Refinement; No. UCB-ITS-PRR-2010-19; University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Du, Y.; Wu, G.; Boriboonsomsin, K.; Chan, C.Y. Empirical study of lane-changing behavior along different types of high-occupancy vehicle facilities in California. Transp. Res. Rec. 2013, 2396, 143–150. [Google Scholar] [CrossRef]
- Sarvi, M. Freeway weaving phenomena observed during congested traffic. Transp. A Transp. Sci. 2013, 9, 299–315. [Google Scholar] [CrossRef]
- Kusuma, A.; Liu, R.; Choudhury, C.; Montgomery, F. Lane-changing characteristics at weaving section. In Proceedings of the Transportation Research Board 94th Annual Meeting, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- De Blasiis, M.R.; Ferrante, C.; Santilli, A.; Veraldi, V. Driving behavior in weaving maneuver: A driving simulator study. In Advances in Human Aspects of Transportation; Springer: Cham, Switzerland, 2017; pp. 313–325. [Google Scholar]
- Van Beinum, A.; Farah, H.; Wegman, F.; Hoogendoorn, S. Driving behaviour at motorway ramps and weaving segments based on empirical trajectory data. Transp. Res. Part C Emerg. Technol. 2018, 92, 426–441. [Google Scholar] [CrossRef]
- Yuan, J.; Abdel-Aty, M.; Cai, Q.; Lee, J. Investigating drivers’ mandatory lane change behavior on the weaving section of freeway with managed lanes: A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 11–32. [Google Scholar] [CrossRef]
- Aljaafreh, A.; Alshabatat, N.; Al-Din, M.S.N. Driving style recognition using fuzzy logic. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES 2012), Istanbul, Turkey, 24–27 July 2012; pp. 460–463. [Google Scholar]
- Vaitkus, V.; Lengvenis, P.; Žylius, G. Driving style classification using long-term accelerometer information. In Proceedings of the 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 2–5 September 2014; pp. 641–644. [Google Scholar]
- Sun, D.; Elefteriadou, L. Information categorization based on driver behavior for urban lane-changing maneuvers. Transp. Res. Rec. 2011, 2249, 86–94. [Google Scholar] [CrossRef]
- Sun, D.; Elefteriadou, L. A driver behavior-based lane-changing model for urban arterial streets. Transp. Sci. 2014, 48, 184–205. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, Y.H.; Roetting, M.; Wang, Y.; Wei, H. Driver’s views and behaviors about safety in China—What do they NOT know about driving? Accid. Anal. Prev. 2006, 38, 22–27. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Shi, J. Driving Behavior and Influential Factors Study in Beijing. J. Transp. Inf. Saf. 2010, 28, 114–119. [Google Scholar]
- Ulleberg, P.; Rundmo, T. Personality, attitudes and risk perception as predictors of risky driving behaviour among young drivers. Saf. Sci. 2003, 41, 427–443. [Google Scholar] [CrossRef]
- Xu, J.; Liu, J.; Sun, X.; Zhang, K.; Qu, W.; Ge, Y. The relationship between driving skill and driving behavior: Psychometric adaptation of the Driver Skill Inventory in China. Accid. Anal. Prev. 2018, 120, 92–100. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Tian, D.; Wang, Z. Study on relationships between driving behavior of private car drivers and their personality traits. China Saf. Sci. J. 2019, 1, 3. [Google Scholar]
- Zheng, J.; Zhou, Y.; Yu, R.; Zhao, D.; Lu, Z.; Zhang, P. Survival rate of China passenger vehicles: A data-driven approach. Energy Policy 2019, 129, 587–597. [Google Scholar] [CrossRef]
- Sun, S.; Duan, Z. Modeling passengers’ loyalty to public transit in a two-dimensional framework: A case study in Xiamen, China. Transp. Res. Part A Policy Pract. 2019, 124, 295–309. [Google Scholar] [CrossRef]
- Gao, J.; Xu, Z.; Gao, X. Control Strategy for PHEB Based on Actual Driving Cycle with Driving Style Characteristic. J. Control Sci. Eng. 2019, 2019. [Google Scholar] [CrossRef] [Green Version]
- Ariën, C.; Jongen, E.M.; Brijs, K.; Brijs, T.; Daniels, S.; Wets, G. A simulator study on the impact of traffic calming measures in urban areas on driving behavior and workload. Accid. Anal. Prev. 2013, 61, 43–53. [Google Scholar] [CrossRef]
- Reinolsmann, N.; Alhajyaseen, W.; Brijs, T.; Pirdavani, A.; Hussain, Q.; Brijs, K. Investigating the impact of dynamic merge control strategies on driving behavior on rural and urban expressways–A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 469–484. [Google Scholar] [CrossRef] [Green Version]
- Toledo, T.; Zohar, D. Modeling duration of lane changes. Transp. Res. Rec. 2007, 1999, 71–78. [Google Scholar] [CrossRef]
- Zheng, Z.; Du, Z.; Yan, Q.; Xiang, Q.; Chen, G. The impact of rhythm-based visual reference system in long highway tunnels. Saf. Sci. 2017, 95, 75–82. [Google Scholar] [CrossRef]
- Fuller, R. Towards a general theory of driver behaviour. Accid. Anal. Prev. 2005, 37, 461–472. [Google Scholar] [CrossRef] [PubMed]
- Sagberg, F.; Selpi; Bianchi Piccinini, G.F.; Engström, J. A review of research on driving styles and road safety. Hum. Factors 2015, 57, 1248–1275. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Tang, K.; Chen, S.; Khattak, A.J.; Pan, Y. On-line aggressive driving identification based on in-vehicle kinematic parameters under naturalistic driving conditions. Transp. Res. Part C Emerg. Technol. 2020, 114, 554–571. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, C.; Zhang, J.; Fang, S.; You, J.; Guo, J. Modeling lane-changing behavior in freeway off-ramp areas from the shanghai naturalistic driving study. J. Adv. Transp. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Liu, M. Impact of driving style on freeway lane changing behaviors: A driving simulator-based study. J. Southeast Univ. (Nat. Sci. Ed.) 2017, 47, 1037–1041. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driver Information | N | Percent (%) | |
|---|---|---|---|
| Gender | Male | 457 | 78.3 |
| Female | 126 | 21.6 | |
| Age | 18~30 | 219 | 37.6 |
| 31~40 | 205 | 35.2 | |
| 41~50 | 107 | 18.4 | |
| >50 | 52 | 8.9 | |
| Working as a driver | Yes | 154 | 26.4 |
| No | 429 | 73.6 | |
| Whether a vehicle commuter or not | Yes | 340 | 58.3 |
| No | 243 | 41.7 | |
| Annual mileage (km) | ≤10,000 | 79 | 13.6 |
| 10,001~50,000 | 92 | 15.8 | |
| 50,001~100,000 | 107 | 18.4 | |
| 100,001~300,000 | 161 | 27.6 | |
| >300,000 | 144 | 24.7 | |
| Driving years | ≤3 | 121 | 20.8 |
| 4~5 | 106 | 18.2 | |
| 6~10 | 186 | 31.9 | |
| 11~15 | 88 | 15.1 | |
| >15 | 82 | 14.1 | |
| Vehicle type | Passenger Car | 402 | 69.00 |
| SUV | 99 | 17.00 | |
| MPV | 10 | 1.70 | |
| Other | 72 | 12.30 | |
| Ran a red light within last 3 years | 0 | 254 | 43.6 |
| 1~2 | 234 | 40.1 | |
| 3~4 | 71 | 12.2 | |
| ≥5 | 24 | 4.2 | |
| Whether accidents happened within the last 3 years | Yes | 169 | 29.0 |
| No | 414 | 71.0 | |
| Whether anyone was injured in an accident within the last 3 years | Yes | 26 | 4.5 |
| No | 557 | 95.5 | |
| Factor | Cronbach’s α | KMO | Bartlett’s Spherical Test, Sig Level = 0.05 |
|---|---|---|---|
| Driving behavior at weaving sections | 0.866 | 0.816 | 0.000 |
| Driving attitude | 0.859 | 0.793 | 0.000 |
| Driving Skill | 0.942 | 0.842 | 0.000 |
| Personality | 0.837 | 0.708 | 0.000 |
| Category | Factor | Question No. Group |
|---|---|---|
| 1 | Emotional factor | A11, A10, A16, A15, A18 |
| Speeding factor | A8, A7, A3, A17 | |
| Negligence factor | A4, A5, A1, A2 | |
| Wrong driving factor | A4, A14, A13 | |
| Risk factor | A12, A9, A6 | |
| 2 | Ignore speed factor | B5, B7, B1, B6 |
| Ignore rule factor | B11, B2, B3, B4 | |
| Entertainment factor | B8, B9, B10 | |
| 3 | Normal operating attitude factor | C7, C8, C6, C9, C11, C3, C2, C12, C10, C1 |
| Special operating attitude factor | C4, C5 | |
| 4 | Irritability factor | D7, D6, D8, D5 |
| Environmental adaptability factor | D4, D3, D2, D1 | |
| Pursuit stimulus factor | D10, D9 |
| Parameters | Type A | Type B | Type C |
|---|---|---|---|
| N | 160 | 186 | 237 |
| Percent (%) | 27.4 | 31.9 | 40.7 |
| Mean score in questionnaire | 145.6 | 118.9 | 131.1 |
| Median score in questionnaire | 145 | 121 | 129 |
| Define the driving style | Aggressive | Conservative | Normal |
| No. of accidents | 73 | 39 | 57 |
| No. of accidents with injured person | 18 | 3 | 5 |
| Logistic Fitting | A1 | A2 | x0 | p | Adj. R2 | |
| Conservative drivers | 3.862 | 11.036 | 29.425 | 28.633 | 0.6876 | |
| Gauss Fitting | A | w | xc | y0 | Adj. R2 | |
| Normal driver | 40.988 | 4.103 | 37.690 | 4.112 | 0.714 | |
| Aggressive drivers | Peak1 | 31.506 | 6.162 | 25.671 | 3.217 | 0.539 |
| Peak2 | 14.609 | 5.167 | 57.148 | 3.217 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Z.; Xiang, Q.; Gu, X.; Ma, Y.; Zheng, K. The Influence of Individual Differences on Diverging Behavior at the Weaving Sections of an Urban Expressway. Int. J. Environ. Res. Public Health 2021, 18, 25. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18010025
Zheng Z, Xiang Q, Gu X, Ma Y, Zheng K. The Influence of Individual Differences on Diverging Behavior at the Weaving Sections of an Urban Expressway. International Journal of Environmental Research and Public Health. 2021; 18(1):25. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18010025
Chicago/Turabian StyleZheng, Zhanji, Qiaojun Xiang, Xin Gu, Yongfeng Ma, and Kangkang Zheng. 2021. "The Influence of Individual Differences on Diverging Behavior at the Weaving Sections of an Urban Expressway" International Journal of Environmental Research and Public Health 18, no. 1: 25. https://0-doi-org.brum.beds.ac.uk/10.3390/ijerph18010025