
Unified Power Converter Based on a Dual-Stator Permanent Magnet Synchronous Machine for Motor Drive and Battery Charging of Electric Vehicles




Abstract
:1. Introduction
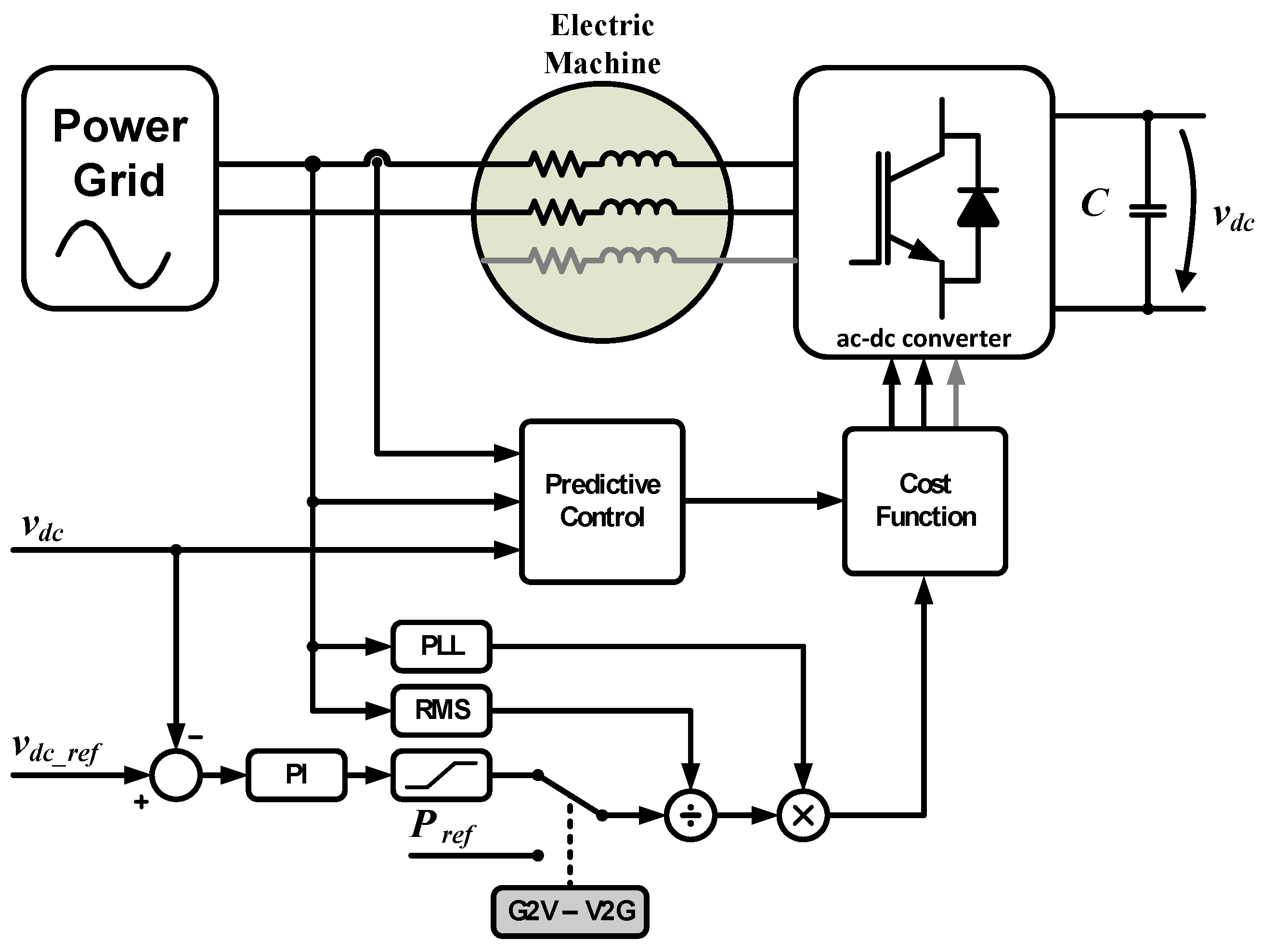
2. Proposed Unified Power Converter
3. Control Algorithms for the Unified Power Converter
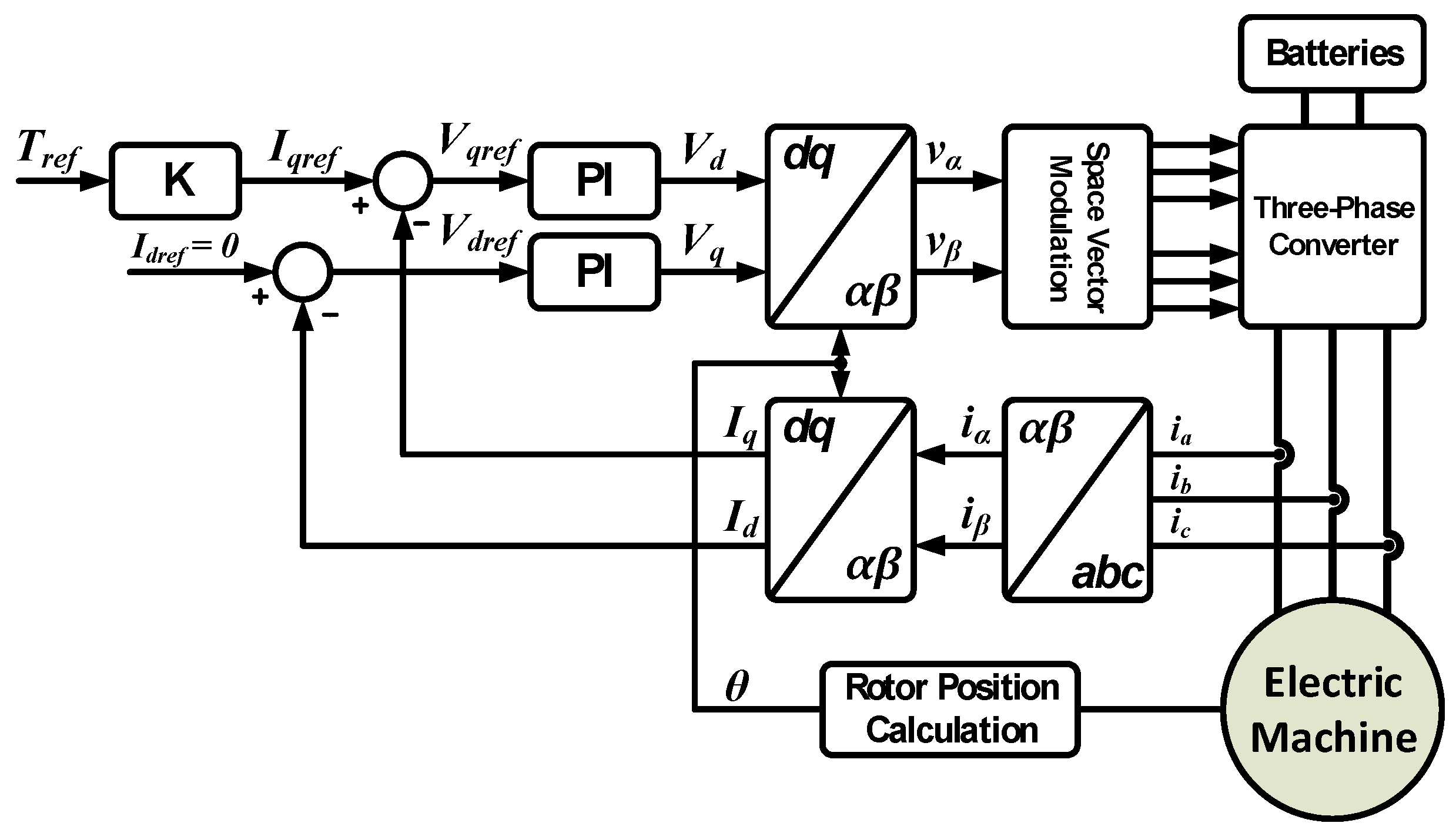
3.1. Operation in Traction Mode
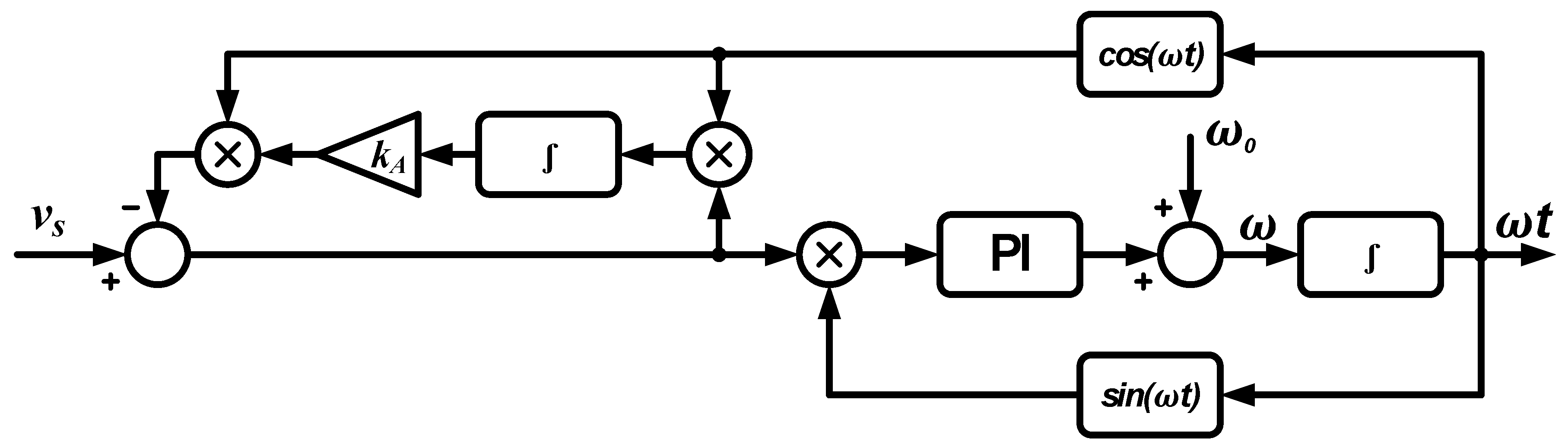
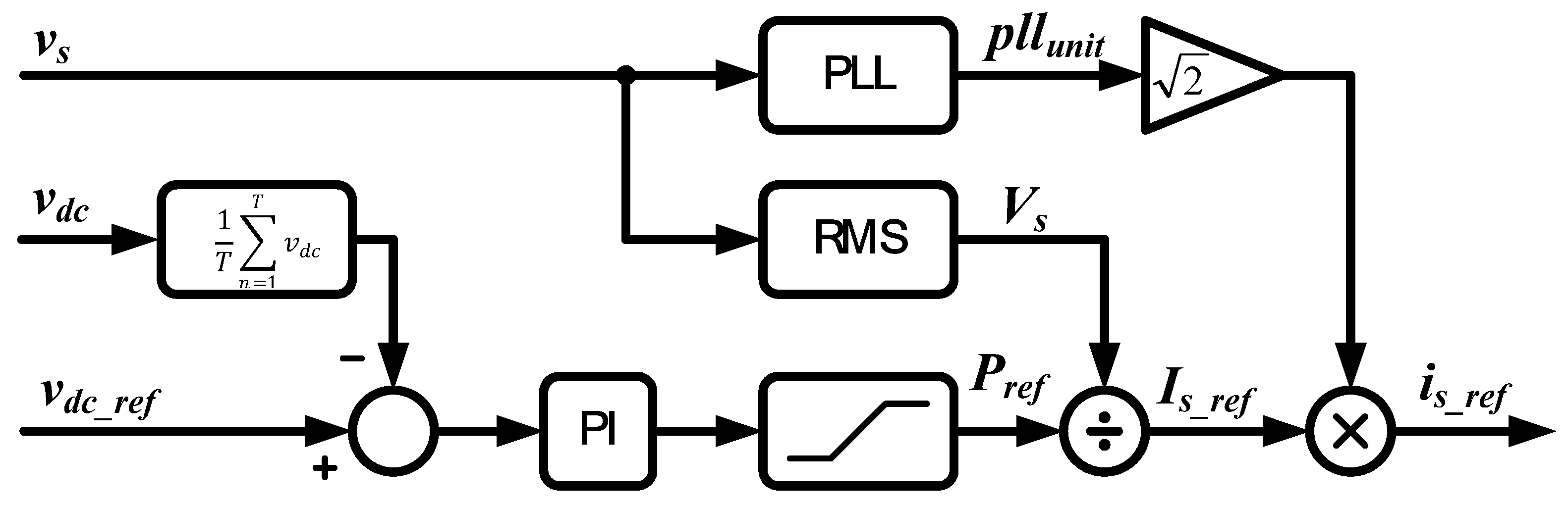
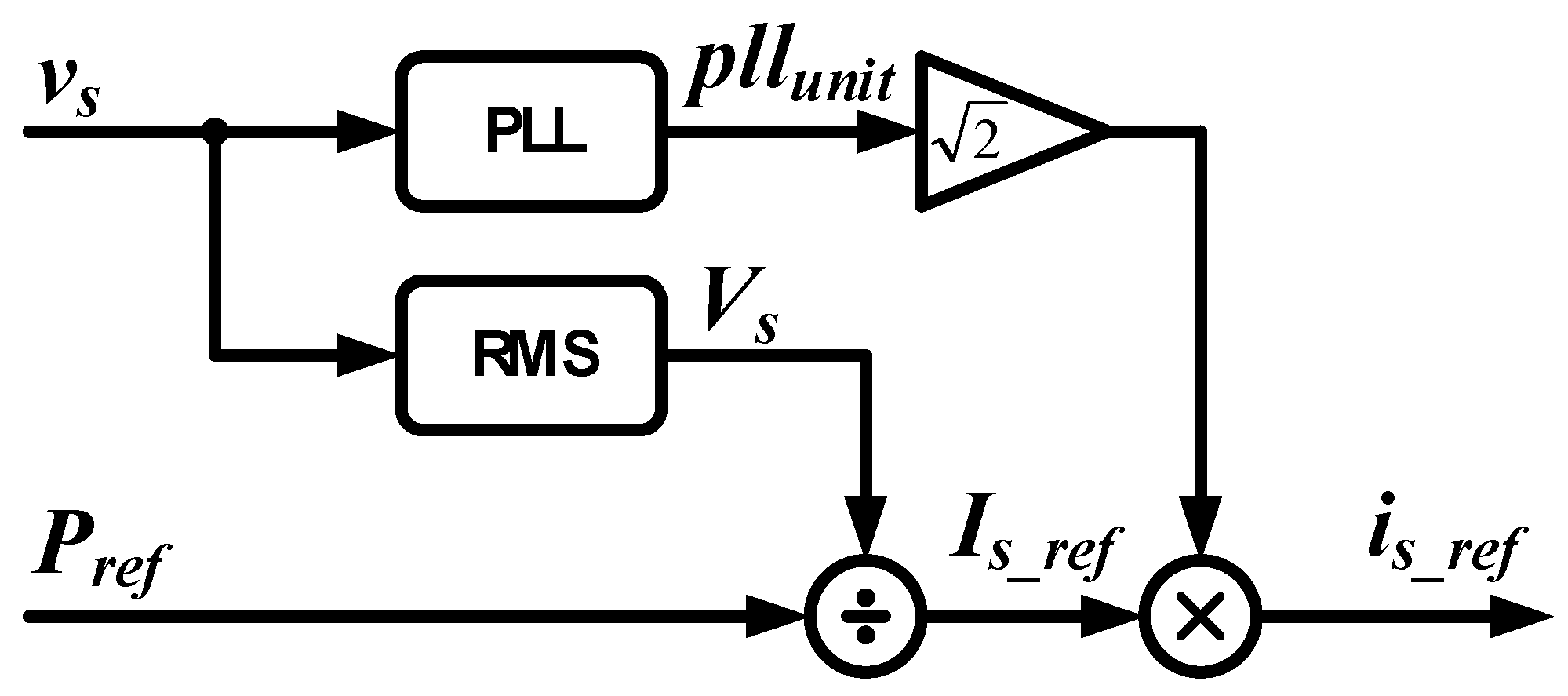
3.2. Operation in Battery-Charging Mode
4. Simulation Results
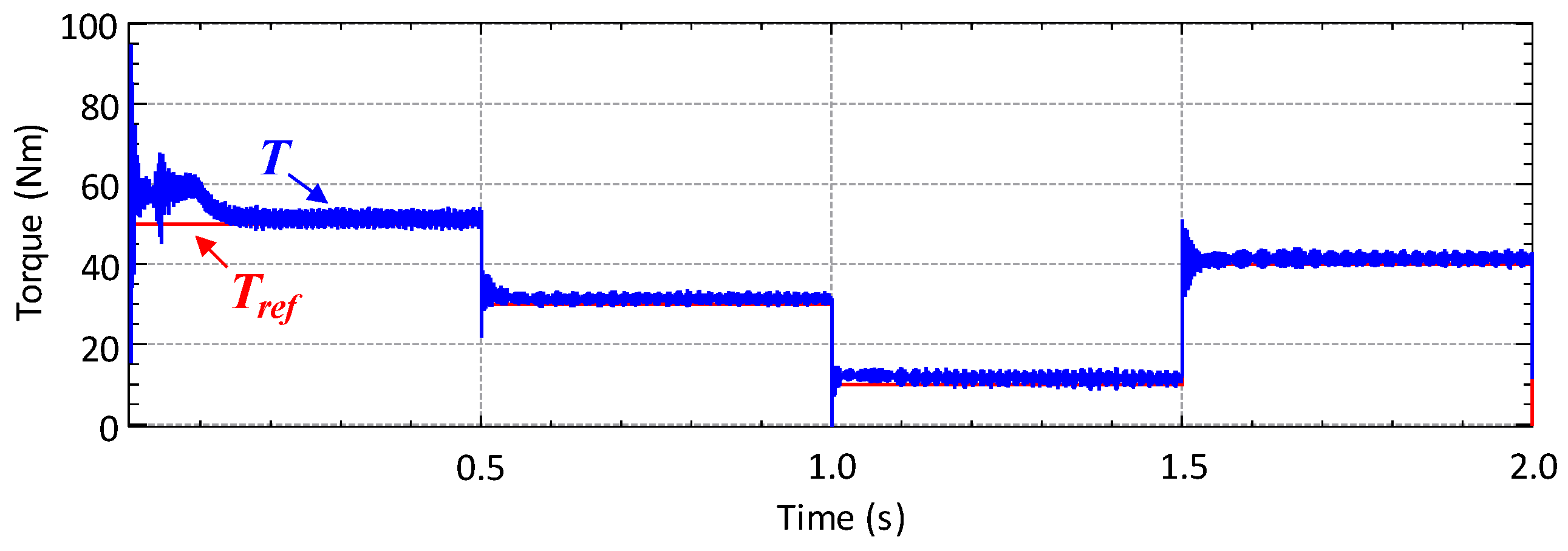
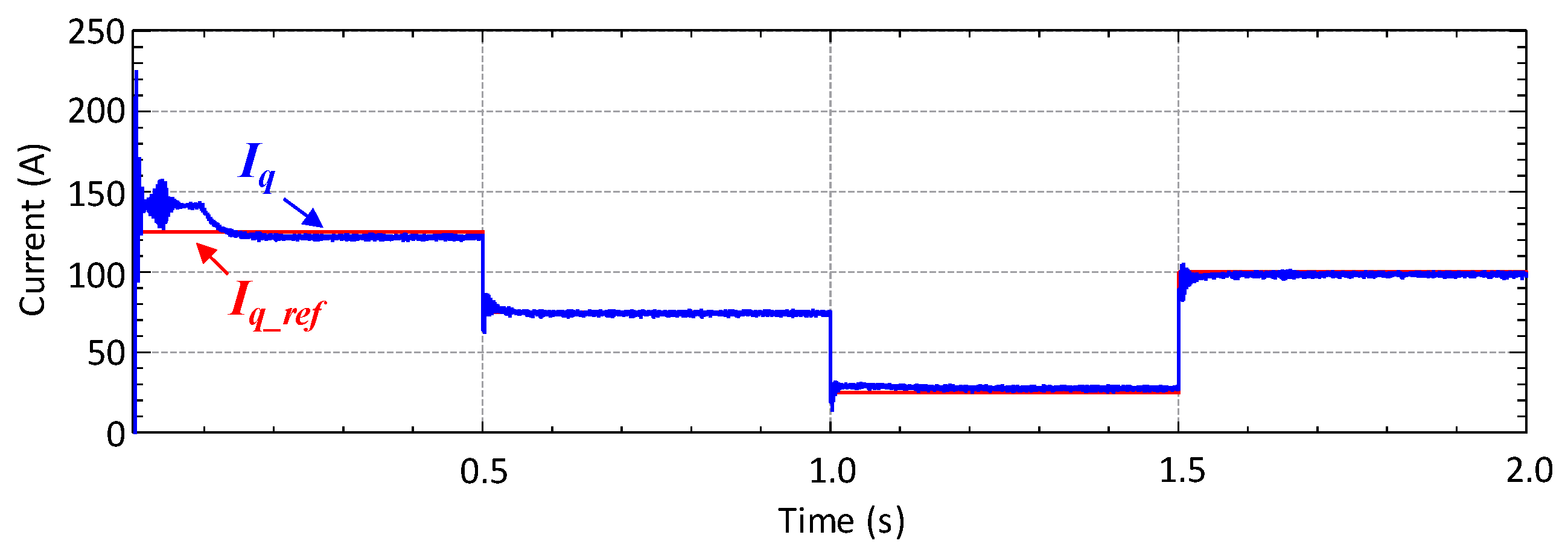
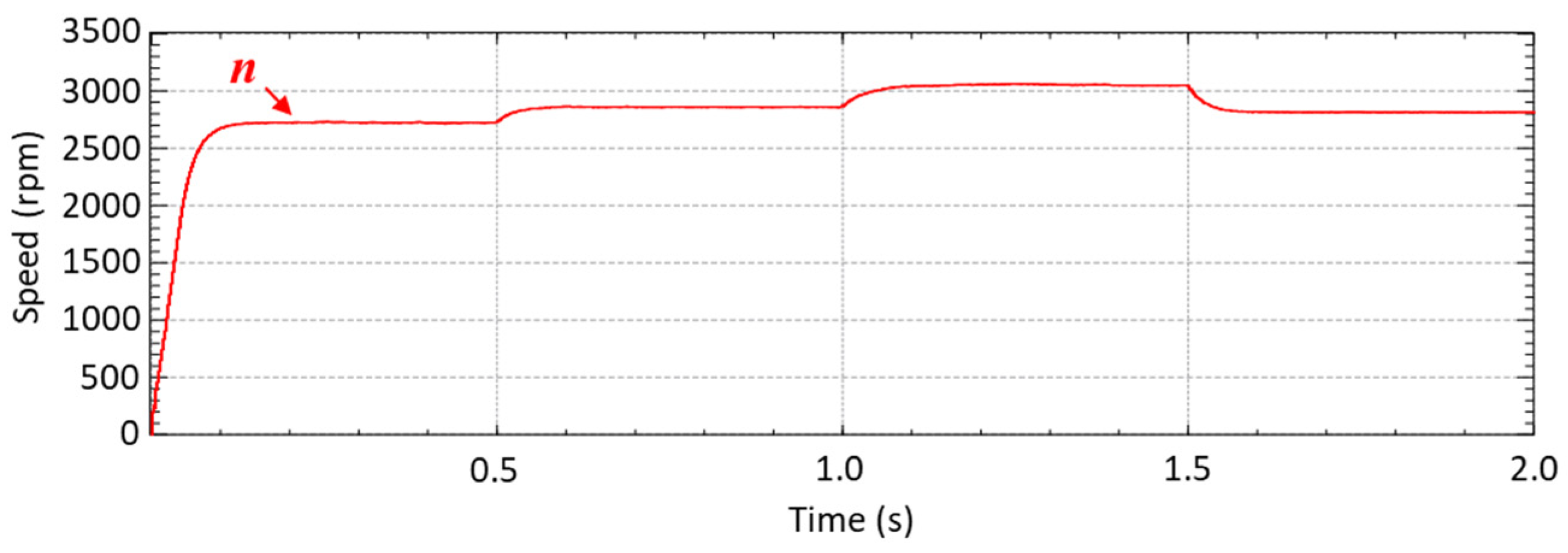
4.1. Operation in Traction Mode
4.2. Operation in Battery-Charging Mode
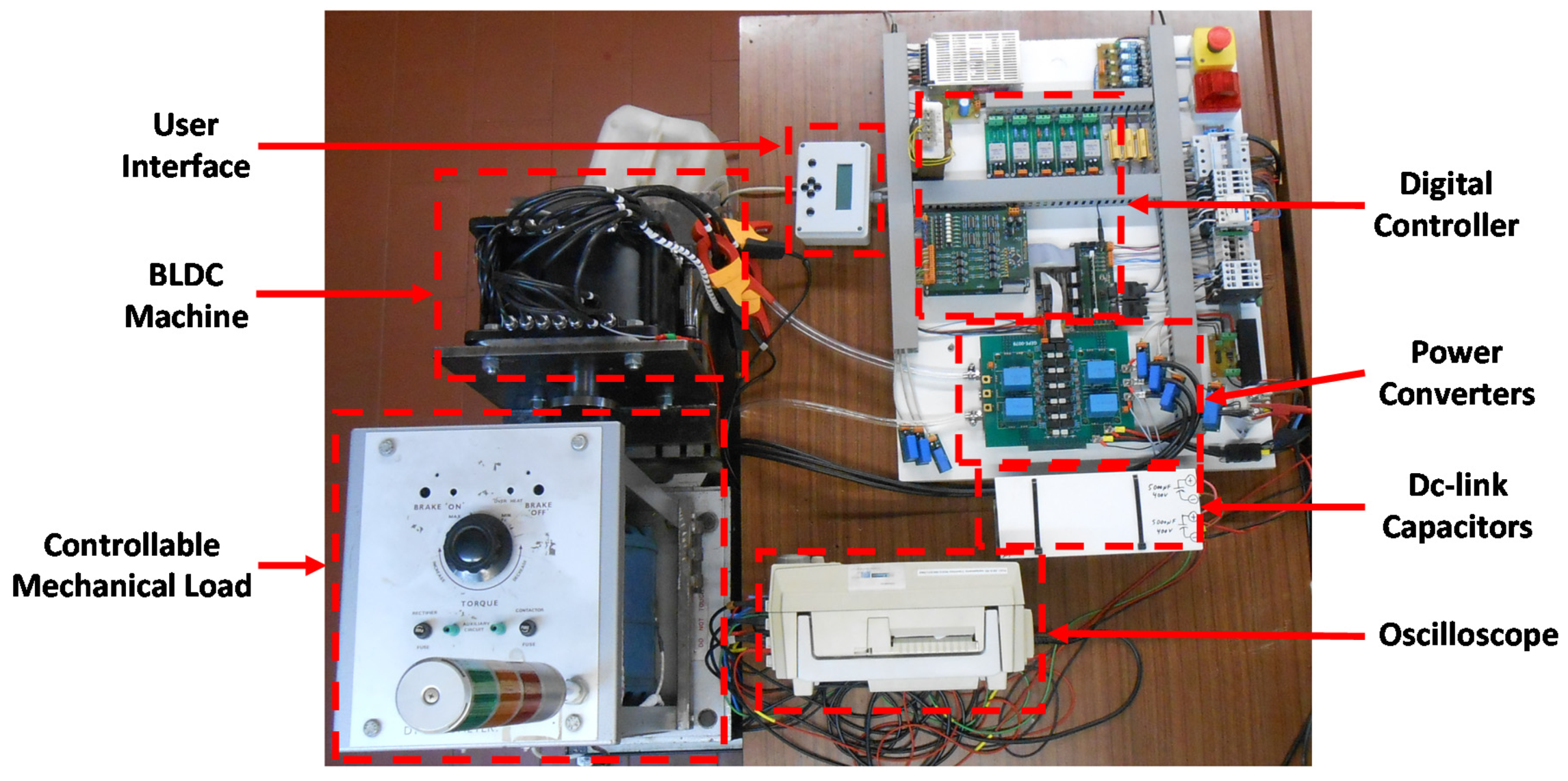
5. Experimental Validation
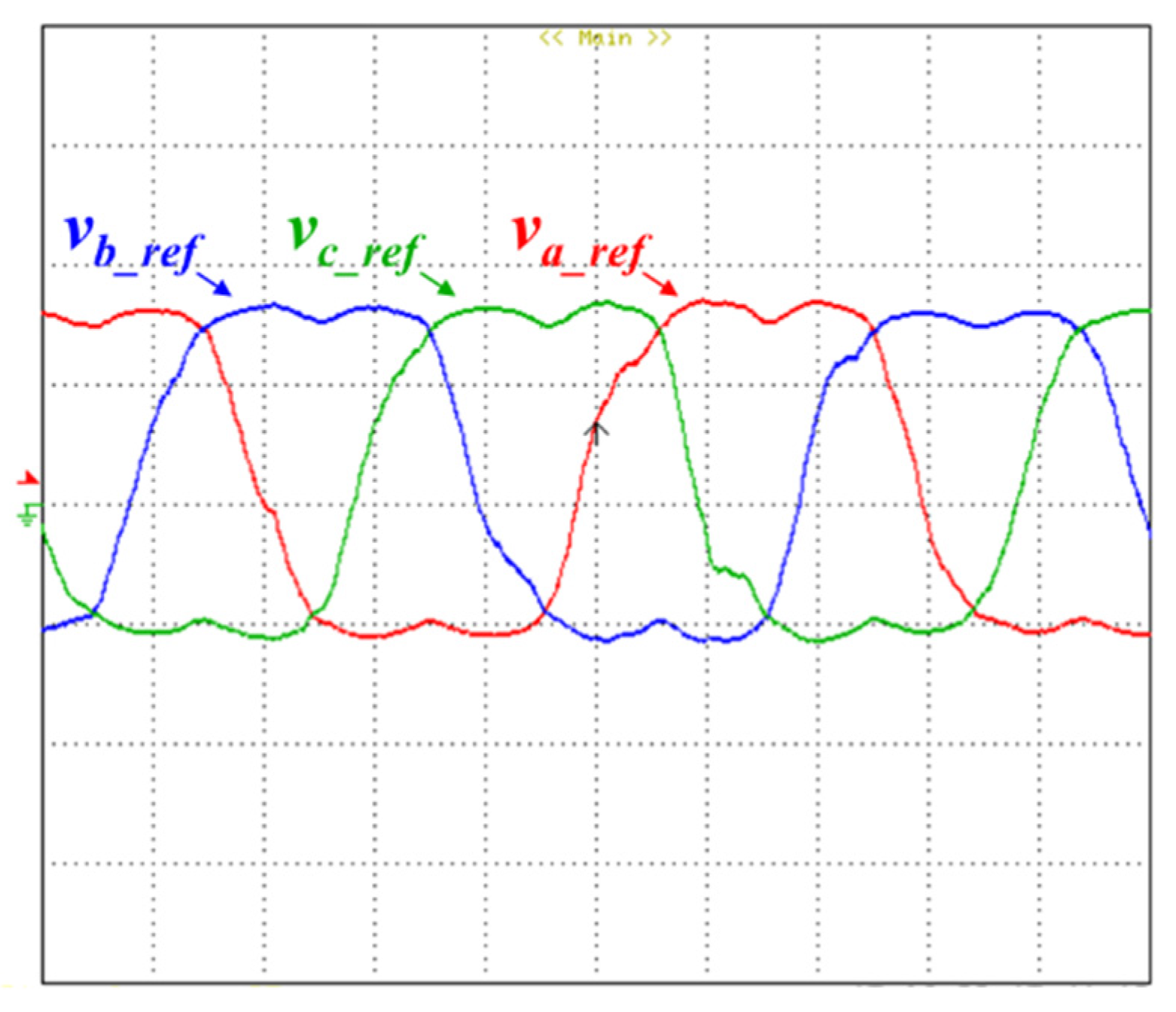
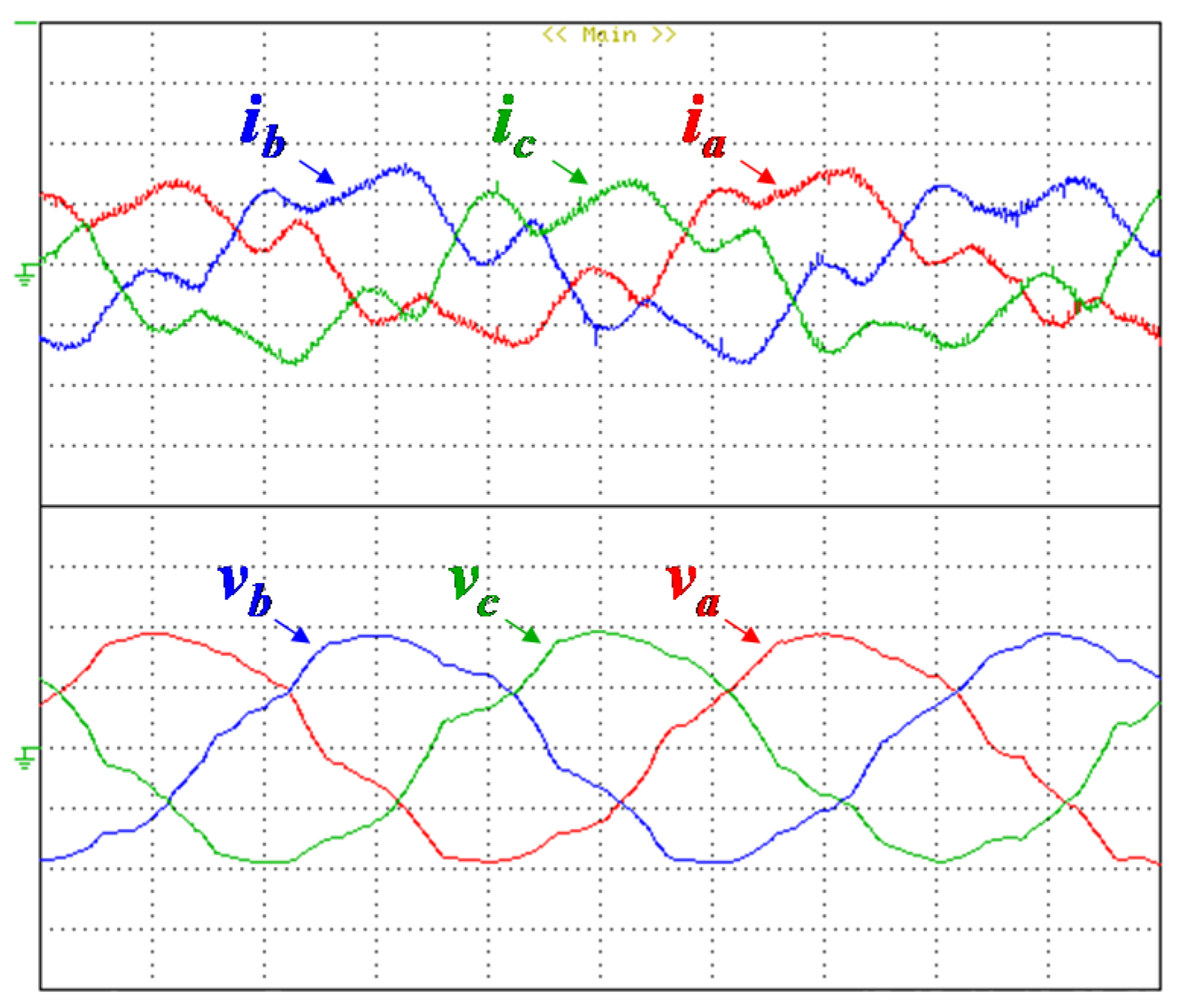
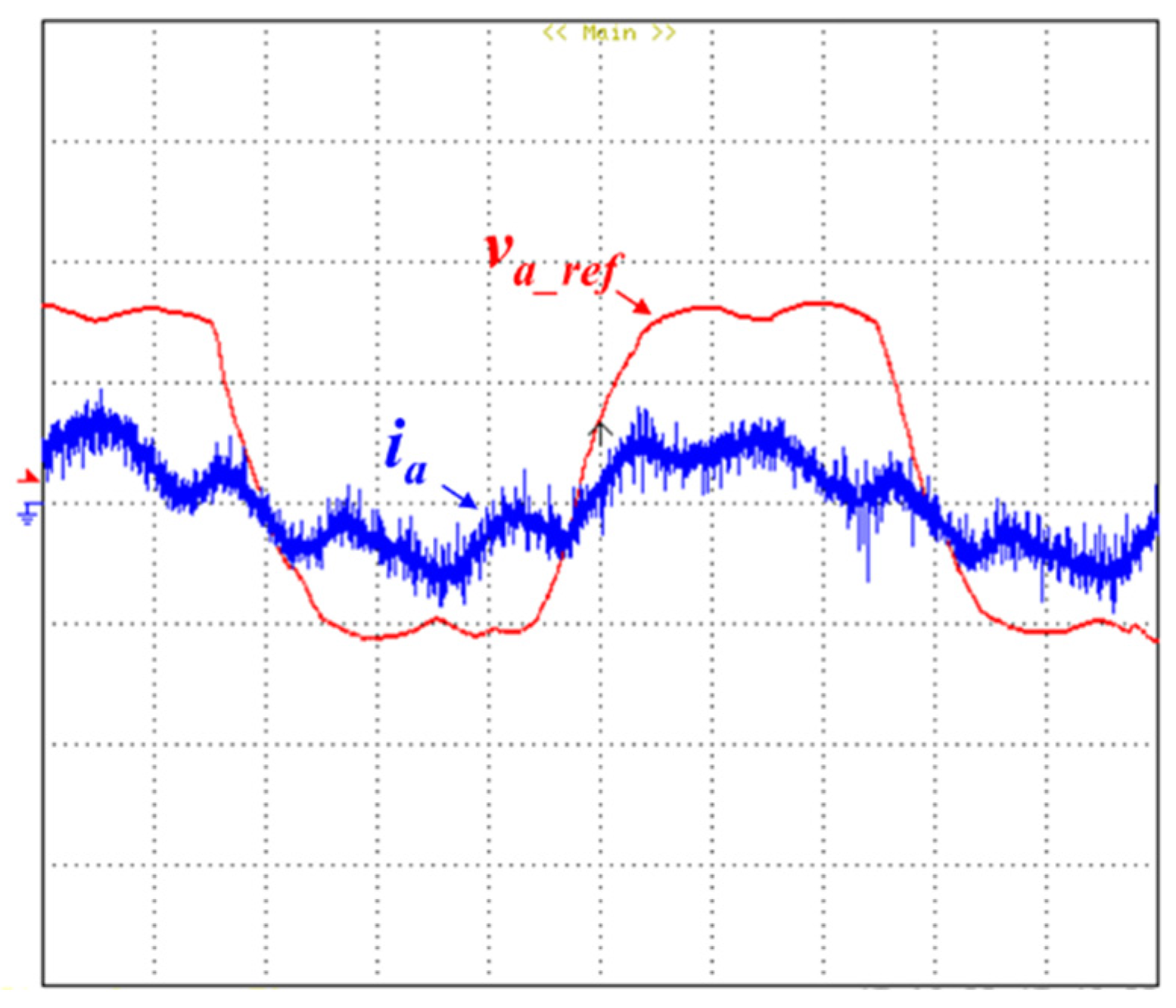
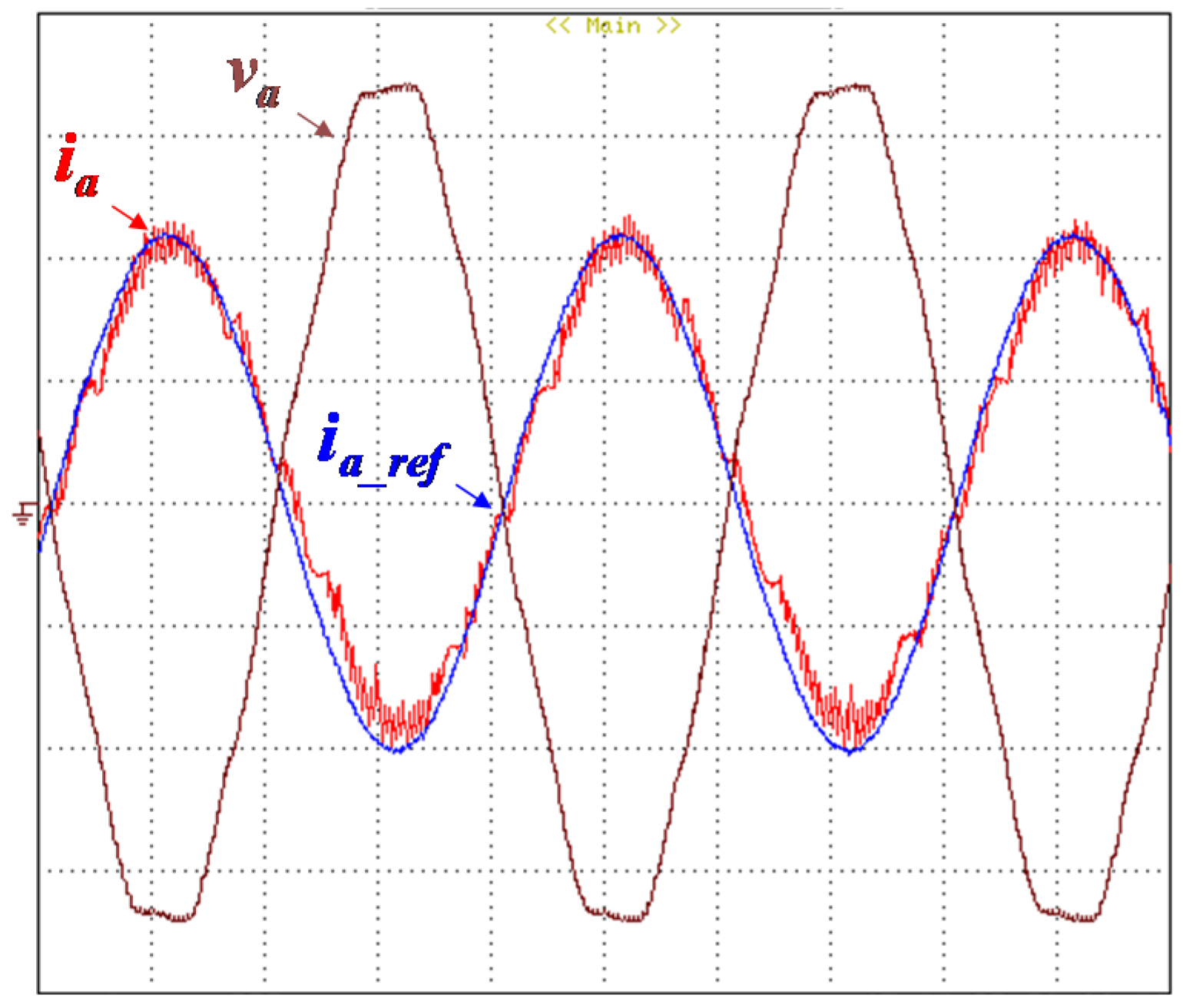
5.1. Operation in Traction Mode
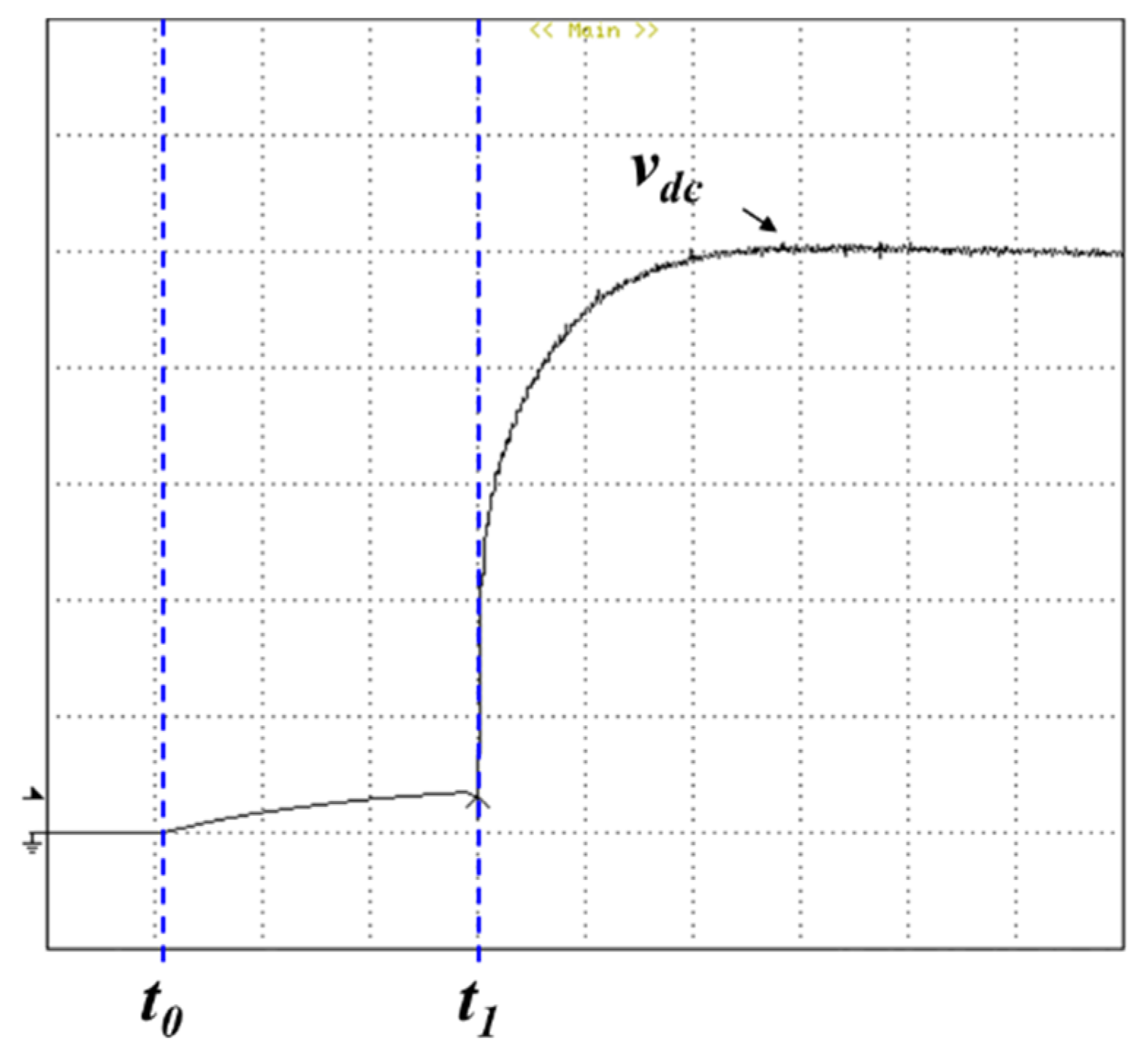
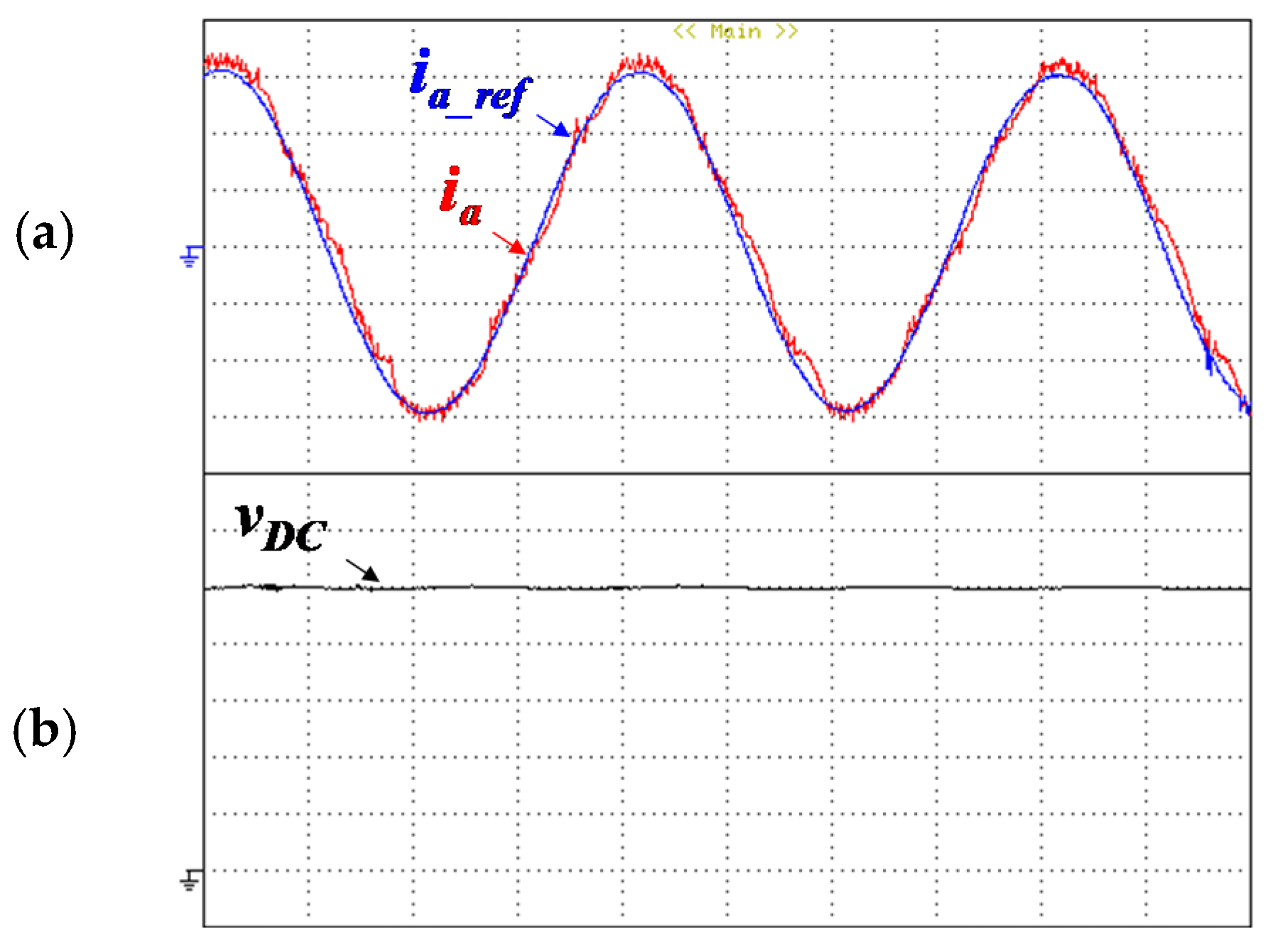
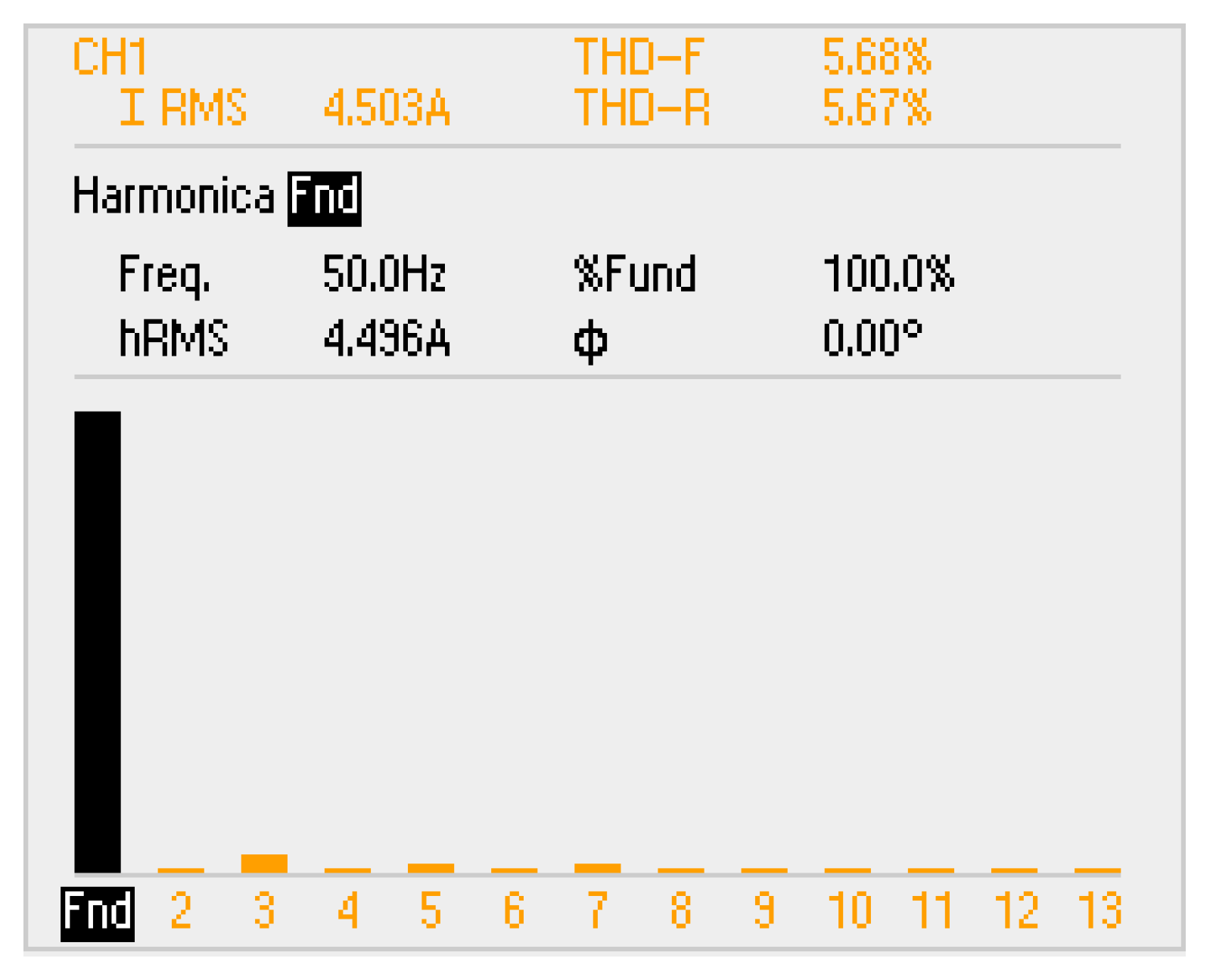
5.2. Operation in Battery-Charging Mode
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Woo, D.-G.; Kim, Y.-S.; Lee, B.-K. Effect of PWM schemes on integrated battery charger for plug-in hybrid electric vehicles: Performance, power factor, and efficiency. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–24 March 2014; pp. 3243–3248. [Google Scholar]
- Haghbin, S.; Lundmark, S.; Alakula, M.; Carlson, O. Grid-Connected Integrated Battery Chargers in Vehicle Applications: Review and New Solution. IEEE Trans. Ind. Electron. 2012, 60, 459–473. [Google Scholar] [CrossRef]
- Afonso, J.L.; Cardoso, L.A.L.; Pedrosa, D.; Sousa, T.J.C.; Machado, L.; Tanta, M.; Monteiro, V. A Review on Power Electronics Technologies for Electric Mobility. Energies 2020, 13, 6343. [Google Scholar] [CrossRef]
- Monteiro, V.; Afonso, J.A.; Ferreira, J.C.; Afonso, J.L. Vehicle Electrification: New Challenges and Opportunities for Smart Grids. Energies 2019, 12, 118. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Monteiro, V.; Afonso, J.A.; Sousa, T.J.; Cardoso, L.A.L.; Pinto, J.G.; Afonso, J.L. Vehicle Electrification: Technologies, Challenges, and a Global Perspective for Smart Grids. In Innovation in Energy Systems—New Technologies for Changing Paradigms; IntechOpen: London, UK, 2019. [Google Scholar]
- Thimmesch, D. An SCR Inverter with an Integral Battery Charger for Electric Vehicles. IEEE Trans. Ind. Appl. 1985, IA-21, 1023–1029. [Google Scholar] [CrossRef]
- Rippel, W.E.; Cocconi, A.G. Integrated Motor Drive and Recharge System. U.S. Patent 5,099,186, 24 March 1992. [Google Scholar]
- Chang, H.-C.; Liaw, C.-M. Development of a Compact Switched-Reluctance Motor Drive for EV Propulsion with Voltage-Boosting and PFC Charging Capabilities. IEEE Trans. Veh. Technol. 2009, 58, 3198–3215. [Google Scholar] [CrossRef]
- Lacroix, S.; Laboure, E.; Hilairet, M. An integrated fast battery charger for Electric Vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Subotic, I.; Bodo, N.; Levi, E. An EV Drive-Train with Integrated Fast Charging Capability. IEEE Trans. Power Electron. 2016, 31, 1461–1471. [Google Scholar] [CrossRef] [Green Version]
- V, V.; Kaarthik, R.S. Modeling and Control of an Integrated Battery Charger with Split-Phase Machine. IEEE Trans. Ind. Appl. 2021, 57, 1588–1597. [Google Scholar] [CrossRef]
- Haghbin, S.; Guillen, I.S. Integrated motor drive and non-isolated battery charger based on the torque cancelation in the motor. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–23 April 2013; pp. 824–829. [Google Scholar]
- Haghbin, S.; Thiringer, T.; Carlson, O. An integrated split-phase dual-inverter permanent magnet motor drive and battery charger for grid-connected electric or hybrid vehicles. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1941–1947. [Google Scholar]
- Subotic, I.; Bodo, N.; Levi, E. Single-Phase On-Board Integrated Battery Chargers for EVs Based on Multiphase Machines. IEEE Trans. Power Electron. 2016, 31, 6511–6523. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Majeed, M.S.; Eldeeb, H.M.; Metwly, M.Y.; Abdel-Khalik, A.S.; Hamad, M.; Hamdy, R.A.; Ahmed, S. Post-fault Operation of Onboard Integrated battery Charger via a Nine-Phase EV-Drive Train. IEEE Trans. Ind. Electron. 2020, 68, 1. [Google Scholar] [CrossRef]
- Hoevenaars, E.; Hiller, M. Conceptualization and Efficiency Review of Integrated Chargers Using Six-Phase Machines. IEEE Trans. Transp. Electrification 2021, 1. [Google Scholar] [CrossRef]
- Dusmez, S.; Khaligh, A. Cost effective solutions to level 3 on-board battery chargers. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 2121–2127. [Google Scholar]
- Su, G.-J.; Tang, L. Current source inverter based traction drive for EV battery charging applications. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Haghbin, S.; Khan, K.; Lundmark, S.; Alakula, M.; Carlson, O.; Leksell, M.; Wallmark, O. Integrated chargers for EV’s and PHEV’s: Examples and new solutions. In Proceedings of the The XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Haghbin, S.; Ghorbani, R.; Bermejo, A.; Guillen, I.S. An Integrated Motor Drive and Battery Fast Charger Station for Plug-in Vehicles. In Proceedings of the 13th Spanish Portuguese Conference on Electrical Engineering (13CHLIE), Valencia, Spain, 3–5 July 2013. [Google Scholar]
- De Sousa, L.; Silvestre, B.; Bouchez, B. A combined multiphase electric drive and fast battery charger for Electric Vehicles. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Hegazy, O.; Van Mierlo, J.; Lataire, P. Design and control of bidirectional DC/AC and DC/DC converters for plug-in hybrid electric vehicles. In Proceedings of the 2011 International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 11–13 March 2011; pp. 1–7. [Google Scholar]
- Cocconi, A.G. Combined Motor Drive and Battery Charge System. U.S. Patent 5,341,075, 23 August 1994. [Google Scholar]
- Haghbin, S. Integrated Motor Drives and Battery Chargers for Electric or Plug-in Hybrid Electric Vehicles; Chalmers University of Technology: Gothenburg, Sweden, 2013; ISSN 0346-718X. ISBN 978-91-7385-811-3. [Google Scholar]
- Subotic, I.; Levi, E. A review of single-phase on-board integrated battery charging topologies for electric vehicles. In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Turin, Italy, 26–27 March 2015; pp. 136–145. [Google Scholar]
- Surada, R.; Khaligh, A. A novel approach towards integration of propulsion machine inverter with energy storage charger in plug-in hybrid electric vehicles. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, CA, USA, 7–10 November 2010; pp. 2493–2498. [Google Scholar]
- Wang, L.; Liang, J.; Xu, G.; Xu, K.; Song, Z. A novel battery charger for plug-in hybrid electric vehicles. In Proceedings of the 2012 IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012; pp. 168–173. [Google Scholar]
- Rashidi, A.; Namazi, M.M.; Saghaian-Nezhad, S.M.; Lee, D.H.; Ahn, J.W. An optimized simple current sharing function of SRM with intrgrated battery charger for EV drive. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Busan, Korea, 1–4 June 2016; pp. 1–5. [Google Scholar]
- Harib, K.H.; Abu Khousa, E.; Ismail, A. Field oriented motion control of a 3-phase permanent magnet synchronous motor. In Proceedings of the 2011 2nd International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, United Arab Emirates, 15–17 November 2011; pp. 1–7. [Google Scholar]
- Pedrosa, D.; Carvalho, J.; Gonçalves, H.; Monteiro, V.; Fernandes, A.; Afonso, J.L. Field oriented control of an axial flux permanent magnet synchronous motor for traction solutions. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 1466–1472. [Google Scholar]
- Li, Y.; Gerling, D.; Ma, J.; Liu, J.; Yu, Q. The Comparison of Control Strategies for the Interior PMSM Drive used in the Electric Vehicle. World Electr. Veh. J. 2010, 4, 648–654. [Google Scholar] [CrossRef] [Green Version]
- Ilioudis, V.C.; Margaris, N.I. PMSM sensorless speed estimation based on sliding mode observers. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 2838–2843. [Google Scholar]
- Wang, J.; Liu, H. Novel intelligent sensorless control of permanent magnet synchronous motor drive. In Proceedings of the 2009 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 2–953. [Google Scholar]
- Paulus, D.; Stumper, J.-F.; Kennel, R. Sensorless Control of Synchronous Machines Based on Direct Speed and Position Estimation in Polar Stator-Current Coordinates. IEEE Trans. Power Electron. 2013, 28, 2503–2513. [Google Scholar] [CrossRef]
- Amezquita-Brooks, L.; Liceaga-Castro, J.; Liceaga-Castro, E. Speed and Position Controllers Using Indirect Field-Oriented Control: A Classical Control Approach. IEEE Trans. Ind. Electron. 2014, 61, 1928–1943. [Google Scholar] [CrossRef]
- PMSM Vector Control with Single-Shunt Current-Sensing Using MC56F8013/23—Design Reference Manual. Available online: https://www.nxp.com/docs/en/reference-manual/DRM102.pdf (accessed on 6 May 2021).
- Rodríguez, P.; Luna, A.; Aguilar, R.S.M.; Etxeberria-Otadui, I.; Teodorescu, R.; Blaabjerg, F. A Stationary Reference Frame Grid Synchronization System for Three-Phase Grid-Connected Power Converters under Adverse Grid Conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F.D.; Guerrero, J.M. Design and Tuning of a Modified Power-Based PLL for Single-Phase Grid-Connected Power Conditioning Systems. IEEE Trans. Power Electron. 2012, 27, 3639–3650. [Google Scholar] [CrossRef] [Green Version]
- Thacker, T.; Boroyevich, D.; Burgos, R.; Wang, F. Phase-Locked Loop Noise Reduction via Phase Detector Implementation for Single-Phase Systems. IEEE Trans. Ind. Electron. 2011, 58, 2482–2490. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Iravani, M. A new phase-locked loop (PLL) system. In Proceedings of the 44th IEEE 2001 Midwest Symposium on Circuits and Systems, Dayton, OH, USA, 14–17 August 2002; Volume 1, pp. 421–424. [Google Scholar]
- Karimi-Ghartemani, M.; Iravani, M. A nonlinear adaptive filter for online signal analysis in power systems: Applications. IEEE Trans. Power Deliv. 2002, 17, 617–622. [Google Scholar] [CrossRef]
- Wang, J.; Nademi, H.; Norum, L. Control of input current harmonics and output voltage of three-phase voltage source PWM rectifier using Model Predictive Control. Int. Symp. Ind. Electron. 2013, 1–6. [Google Scholar] [CrossRef]
- Cortés, P.; Rodriguez, J.; Antoniewicz, P.; Kazmierkowski, M. Direct Power Control of an AFE Using Predictive Control. IEEE Trans. Power Electron. 2008, 23, 2516–2523. [Google Scholar] [CrossRef]
- Parvez, M.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. Model predictive control of a bidirectional AC-DC converter for V2G and G2V applications in electric vehicle battery charger. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6. [Google Scholar]
- Xingwu, Y.; Hongchao, J.; Wei, G. Model predictive control of single phase grid-connected inverter. In Proceedings of the 2014 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Hong Kong, China, 7–10 December 2014; pp. 1–4. [Google Scholar]
- Pinto, J.G.; Monteiro, V.; Goncalves, H.; Exposto, B.; Pedrosa, D.; Couto, C.; Afonso, J.L. Bidirectional battery charger with Grid-to-Vehicle, Vehicle-to-Grid and Vehicle-to-Home technologies. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 5934–5939. [Google Scholar]
- Pedrosa, D.D.R.; Pereira, R.; Gonçalves, H.; Exposto, B.F.; Monteiro, V.D.F.; Pinto, J.; Afonso, J.L. Development of a digital controller with data acquisition to a test bench for eletric motors. In Proceedings of the Annual Seminar on Automation, Industrial Electronics and Instrumentation, Guimarães, Portugal, 11–13 July 2012; pp. 458–463. [Google Scholar]







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Special Machine | Power Grid Connection | Hardware Reconfiguration | External Inductors | Bidirectional Operation |
|---|---|---|---|---|---|
| [9] | No | 1-ph | No | No | No |
| [14] | Yes | 1-ph | No | No | Yes |
| [23] | No | 1-ph | No | Yes | Yes |
| [24] | No | 1-ph | Yes | No | Yes |
| [27] | No | 1-ph | Yes | Yes | Yes |
| [28] | Yes | 1-ph | No | No | No |
| Proposed | Yes | 1-ph/3-ph | No | No | Yes |
| Parameter | Value |
|---|---|
| Stator resistance—R | 117.8 mΩ |
| Stator self-inductance—L | 421.3 μH |
| Stator mutual inductance—M | 168.5 μH |
| Peak line-to-line back emf constant—Vpk/krpm | 72.7 Vpk/krpm |
| Rms line-to-line back emf constant—Vrms/krpm | 52.5 Vpk/krpm |
| Number of poles—P | 8 |
| Moment of inertia—J | 4 × 10−3 kgm2 |
| Shaft time constant—B | 0.8 s |
| Parameter | Value |
|---|---|
| Single-phase power grid voltage | 230 V |
| Power grid frequency | 50 Hz |
| dc-Link capacitor | 5 mF |
| Charging power | 1.5 kW |
| Sampling frequency | 40 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pedrosa, D.; Monteiro, V.; Sousa, T.J.C.; Machado, L.; Afonso, J.L. Unified Power Converter Based on a Dual-Stator Permanent Magnet Synchronous Machine for Motor Drive and Battery Charging of Electric Vehicles. Energies 2021, 14, 3344. https://0-doi-org.brum.beds.ac.uk/10.3390/en14113344
Pedrosa D, Monteiro V, Sousa TJC, Machado L, Afonso JL. Unified Power Converter Based on a Dual-Stator Permanent Magnet Synchronous Machine for Motor Drive and Battery Charging of Electric Vehicles. Energies. 2021; 14(11):3344. https://0-doi-org.brum.beds.ac.uk/10.3390/en14113344
Chicago/Turabian StylePedrosa, Delfim, Vitor Monteiro, Tiago J. C. Sousa, Luis Machado, and Joao L. Afonso. 2021. "Unified Power Converter Based on a Dual-Stator Permanent Magnet Synchronous Machine for Motor Drive and Battery Charging of Electric Vehicles" Energies 14, no. 11: 3344. https://0-doi-org.brum.beds.ac.uk/10.3390/en14113344