2.1. Traditional Automation
To highlight the benefits associated with the LS approach, a brief description of the technique currently in use for the protection of MV grids is made in this paragraph [
16].
The MV line represented in
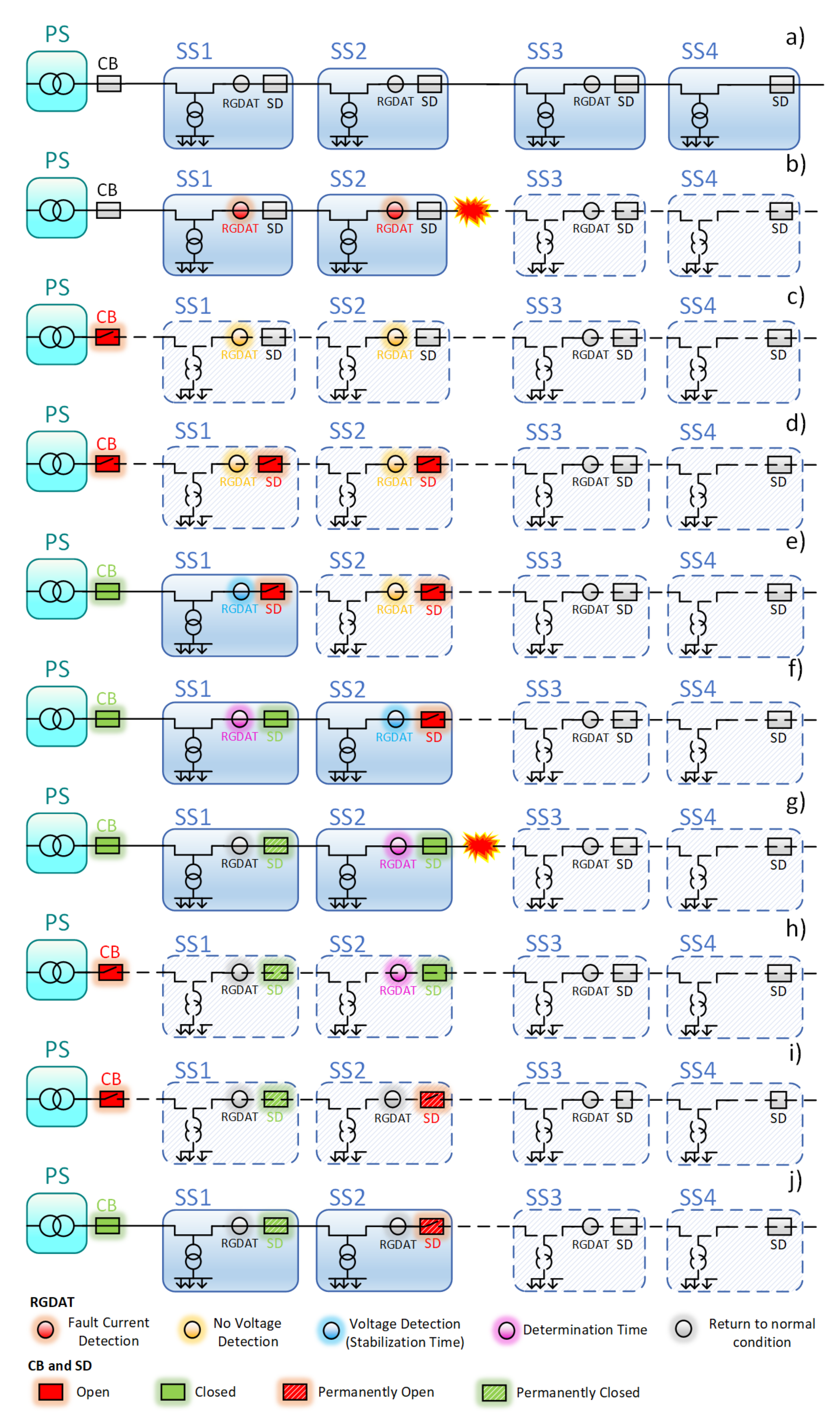
Figure 1a is considered. It is powered by the primary substation PS, which exhibits a circuit breaker (CB) at its output to protect the entire line. The PS node is equipped with a panel to perform the protective functions. Automation processes use these functions (identified by their ANSI code): 51 (to detect overcurrent and short-circuit events), 67 (to detect grounded fault events), 79 (to perform short and long reclosures). The line supplies four secondary substations, indicated as SS1, SS2, SS3 and SS4, which serve both MV and LV consumers. In order to enable the line automation, the SSs must be equipped with a Remote Terminal Unit (RTU), a motorized Switch-Disconnector (SD), a device named Directional Fault and Voltage Absence Detector (RGDAT), which allows one to replicate the 51 and 67 functions as the PS panels and to detect the presence/absence of voltage on the SS’s busbar. The maximum number of automated SSs is three and in
Figure 1 the automated sustations are SS1, SS2, and SS3.
There are different techniques of automation depending on the type of fault and the type of connection of the neutral conductor. Here, we consider the method called Fault Search Function (FRG), which is used in the event of a short-circuit fault and grounded fault on lines with both isolated neutral and compensated neutral. Similar conclusions, however, can also be drawn for the other types of automation.
When a fault current is detected, the PS breaker opens the circuit and, after a short waiting time, a Rapid Re-closing (RR) is applied to eliminate any self-extinguishing transient faults. If at the end of the RR the fault persists, the Slow Re-closing (SR) functions begin to be applied in order to locate the fault; the number and duration of SRs are based on the type of line considered.
Each automated node in the SS is programmed to perform the following steps:
If the RGDAT does not detect any voltage (upstream of the MV line with respect to the point where it is installed) for a certain period of time and has previously detected the presence of a fault current, the RTU automatically commands the opening of the SD;
When the SD is opened and a voltage is detected (the line upstream is powered again), the RTU waits for a programmed stabilization time and then sends a closing command to the SD; at this time, a timer for measuring a programmed determination time starts;
If the voltage is present for the duration of the determination time, the RTU leaves the SD closed and inhibits its opening in the successive steps. Otherwise, if no voltage is detected during the determination time, the RTU opens the SD permanently. This information is sent to the Operations Center.
Assuming that the fault occurs between the secondary substations SS2 and SS3, both the RGDATs in SS1 and in SS2 sense the fault current, as shown in
Figure 1b. The circuit breaker CB in PS opens to protect the line, tries the RR and, if the fault persists, opens again. The RGDATs of all the secondary substations detect the absence of voltage (
Figure 1c). Therefore, the nodes in SS1 and SS2 perform step 1 and command the opening of the respective SDs, as shown in
Figure 1d. Instead, in the substations downstream of the fault (SS3 and SS4) if the fault current has not been detected, the absence of voltage does not cause any procedure. After the programmed time of 30 s, the recloser in the PS feeds the line again. The node in SS1 enters step 2 (
Figure 1e); when the stabilization time elapses, the RTU closes the SD, starts the timer of the determination time and enters step 3, as shown in
Figure 1f. As can be seen in the figure, SS2 also enters step 2 since it detects the power supply voltage. The localization procedure is correctly carried out if the SD of SS2 cannot be closed until the SS1 determination time has elapsed; therefore, the stabilization time must be suitably sized, always coordinating the closure of an SD with the determination time of the upstream substations. When the determination time elapses, SS1 does not detect fault currents; therefore, it keeps its SD closed and inhibits its opening in subsequent operations (
Figure 1g). The RTU in SS2, which is performing step 2, closes the SD, starts the timer for the determination time and enters step 3. In this case, the closure of the SD causes the powering of the fault and the breaker CB in PS opens the circuit again, as shown in
Figure 1h. The RTU in SS2 then permanently opens the SD and sends the related message to the Operations Center, because the absence of voltage has been experienced during the determination time (
Figure 1i). Finally, after a time interval ranging from 70 to 120 s, the line is powered again by the recloser. This time the fault was correctly located and isolated as noticeable in
Figure 1j. The consumers connected to the substations SS1 and SS2, upstream of the faulty section, are powered; they have experienced an interruption of less than 180 s, which is classified by the authority as a short interruption. Users powered by the substations downstream of the fault are disconnected and experience a long interruption until the line is restored.
2.2. Logic Selectivity and Smart Fault Selection
In the FRG automation technique, the localization and isolation of the fault are achieved by means of nodes working locally, independently from the other nodes in the grid [
17]. The only transmitted message is the notification to the Operations Center of an SD that is permanently open (that of SS2 in the example). This guarantees independence on the communication carrier but there is strong dependence on the time of selection. However the automation process is also completed when communication carrier is down.
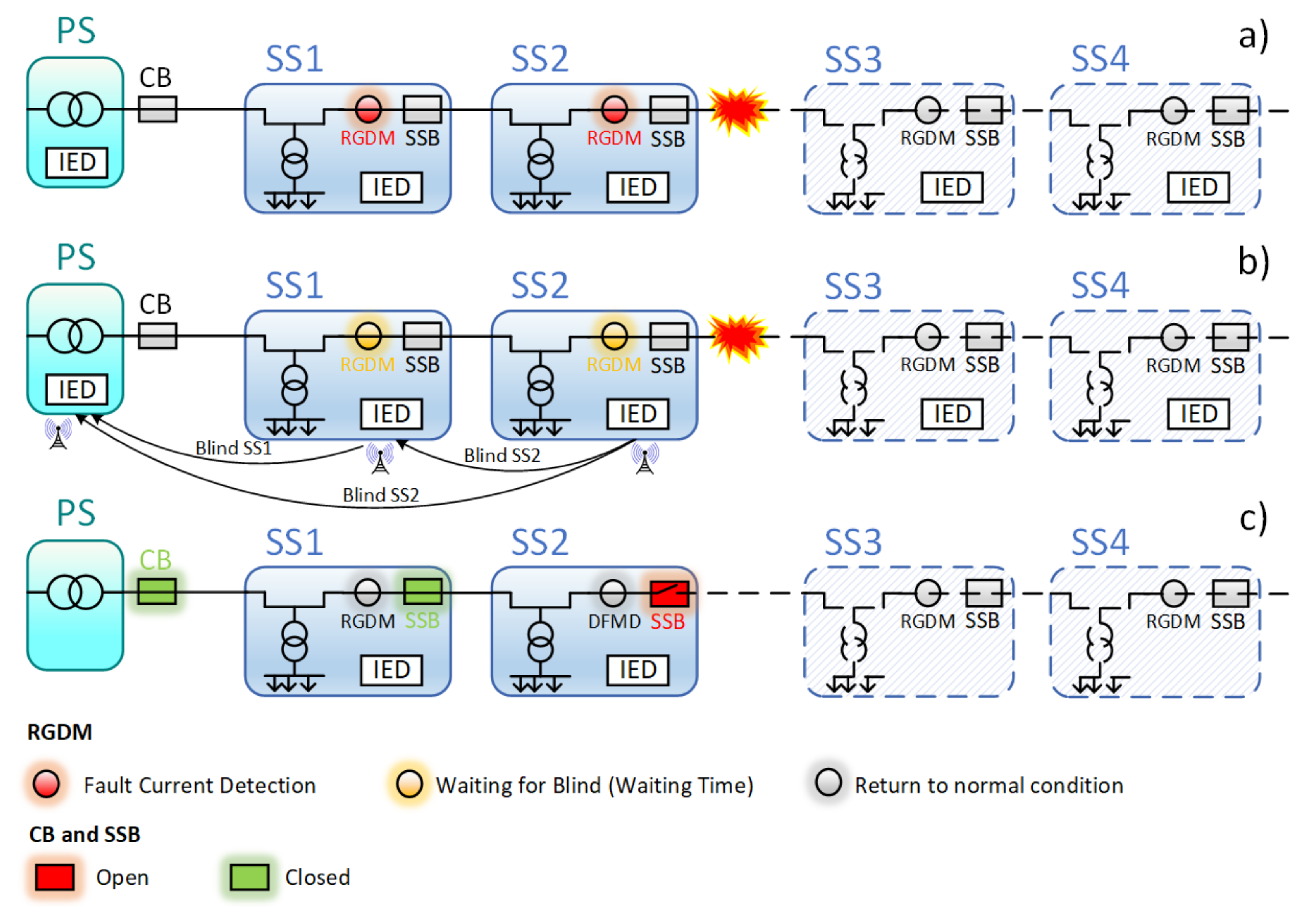
The Logic Selectivity (LS) approach takes advantage of the possibility of making the substations communicate in real time with each other in order to locate the fault in a much faster time. According to this approach, in each automated substation the SD has to be replaced by a motorized Secondary Substation Breaker (SSB), capable of interrupting the fault currents and characterized by trip time suitable for the automation technique (70 ms), whereas the SD is characterized by a trip time of about 4 s. Moreover, the RGDAT is replaced by a Directional Fault and Measure Detector (RGDM) that has to sense fault currents and constantly measures the voltage and line current. The automation process is controlled by the IED, which has the ability to communicate with the other IEDs via a fast communication medium (LTE, optical fiber).
The Smart Fault Selection (SFS) is an improved LS approach, where each node that detects the fault current performs two steps:
It transmits a block signal, called Blind, to the other IEDs installed on the grid; then it starts a timer to measure a programmed waiting time;
If it receive a Blind message from a downstream node during the waiting time, it leaves the breaker SSB closed; otherwise, it commands opening of the SSB.
The contents of the Blind message also contain the topological position (namely, tag) of the IED that has transmitted the message; this allows each IED to determine whether the information received has been sent by an IED installed electrically upstream or downstream on the line.
Referring to
Figure 2, again the case of a short-circuit fault between the substations SS2 and SS3 is considered. The fault current is detected by the PS, SS1 and SS2, as indicated in
Figure 2a. In
Figure 2b, the transmitted messages are highlighted. Substations SS1 and SS2 transmit the Blind message. The IED in the PS receives both the SS1 Blind signals; since at least a Blind signal from a downstream node has been received, the IED in PS inhibits the opening of its breaker. Similarly, SS1, which receives the Blind message from SS2 before the waiting time has expired, inhibits the opening of its breaker. Since the nodes downstream of the fault have not detected the fault current, they do not transmit the Blind message. So, SS2 does not receive any message and, at the end of the programmed waiting time, commands the opening of the SSB.
Additionally, in this case, the final configuration, shown in
Figure 2c, ensures that the substations SS1 and SS2 are powered upstream of the faulty line section, while the users connected to the substations downstream of the fault will experience a long interruption. However, advantages can be highlighted with respect to the traditional approach: the time within which the fault is isolated is independent of the number of automated substations but depends only on the implemented transmission technology. The waiting time for opening the SSB is set based on the time required for the transmission/reception of the Blind signal (typically a few milliseconds), resulting in a stress reduction in the conductors.
Actually, no advantage is perceived by switching from a traditional protection technique to the SFS approach for consumers connected to the substations SS3 and SS4. A notable improvement is obtained when the SFS allows the isolation only the section of line affected by the fault and to power the substations that are downstream of the fault through connection with another primary substation.
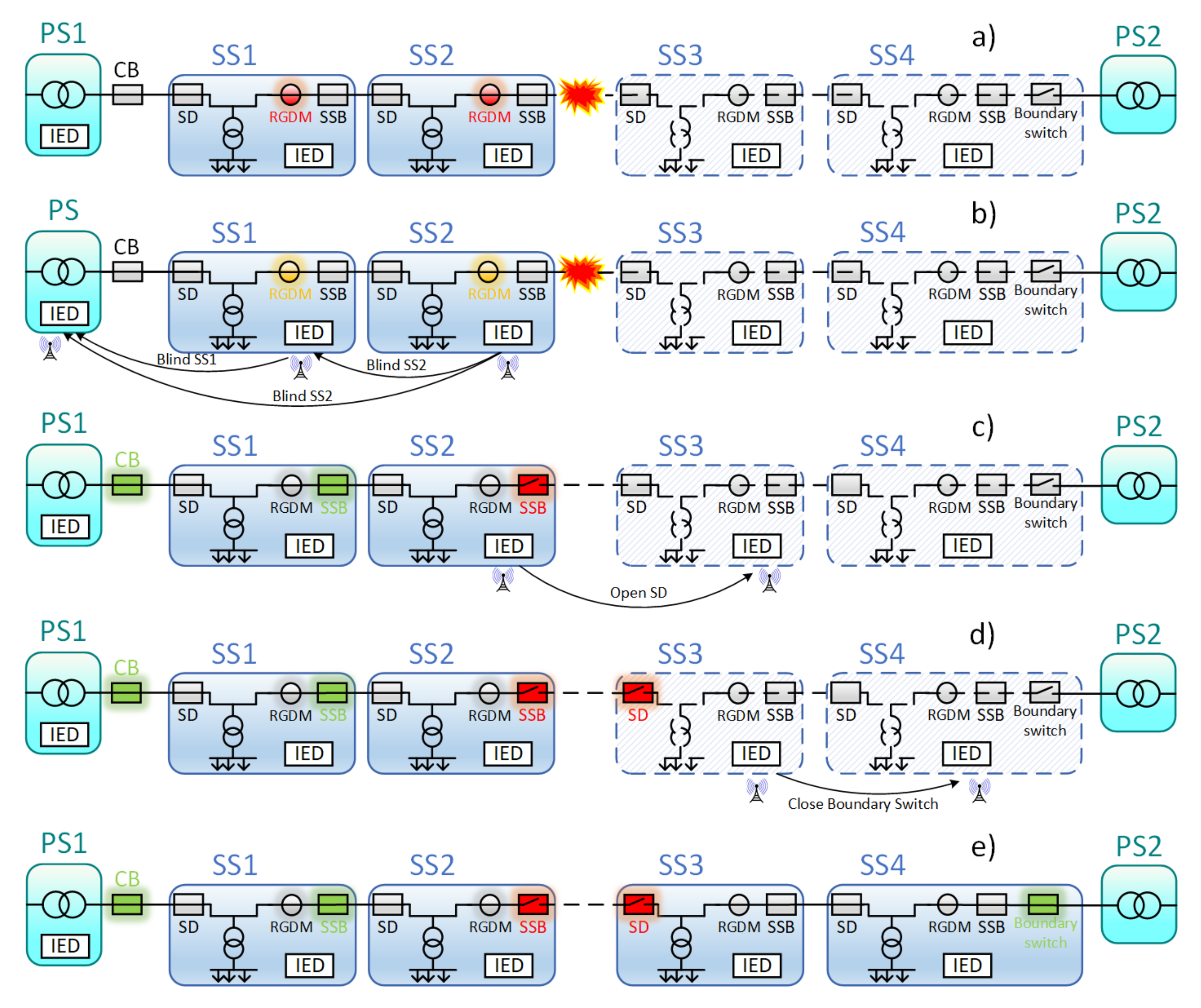
To enable the re-powering of the line, each substation has to also be equipped with an SD controlled by the IED at the substation input, in addition to the breaker SSB at the substations output, as shown in
Figure 3. Moreover, along the MV line there is a boundary substation (SS4 in the figure) that includes another node, called the boundary switch, which is normally open, but it can be closed to connect the MV line to another primary substation (PS2). Considering a fault between SS2 and SS3, the fault is localized according to the same steps previously described.
The difference is that when the IED in SS2 opens the SSB, it successively sends an Open message to the IED of the substation SS3 (
Figure 3c), which opens the SD at the substation input. In this configuration, the faulty section has been isolated and it is possible to supply the MV line from the right side. The IED in SS2 then transmits a Close message to the boundary substation (
Figure 3d), which closes the boundary switch and the substations SS3 and SS4 are powered by the primary substation PS2, as shown in
Figure 3e.
If the line can be re-powered within one second from the start of the fault, costumers connected to the SS3 and SS4 will experience only a transient interruption, with a significant increase in the quality of service indicators.
It is worth noting that the re-powering from another primary substation can be carried out also by the traditional FRG approach described in
Section 2.1. However, it is necessary to open the SD at the input of SS3. Therefore, in SS3, the presence of a device with a communication interface that can receive messages to command the opening of the input SD must be provided or it is necessary to send an intervention team to carry out the necessary operations. In any case, substations SS3 and SS4 would be out of power for a longer time and connected costumers would experience a short or long interruption.
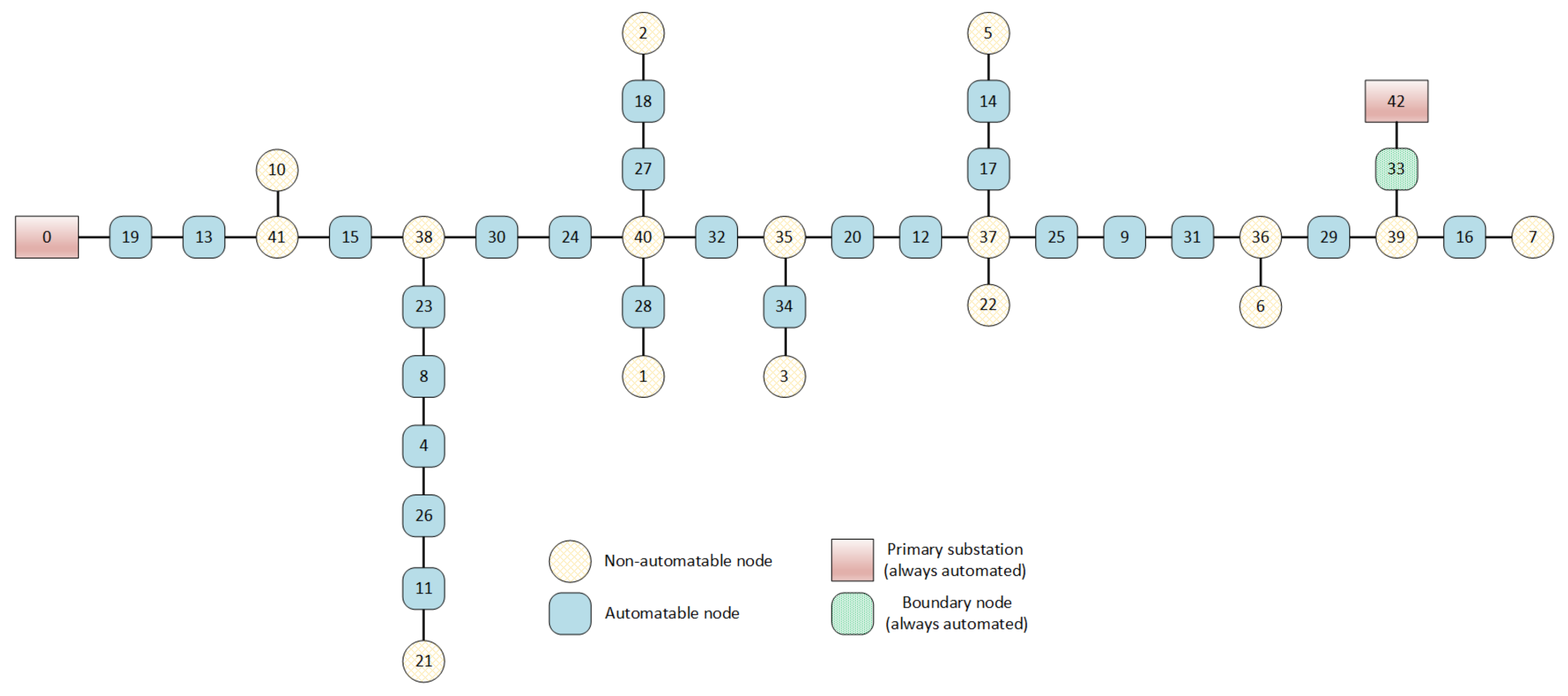
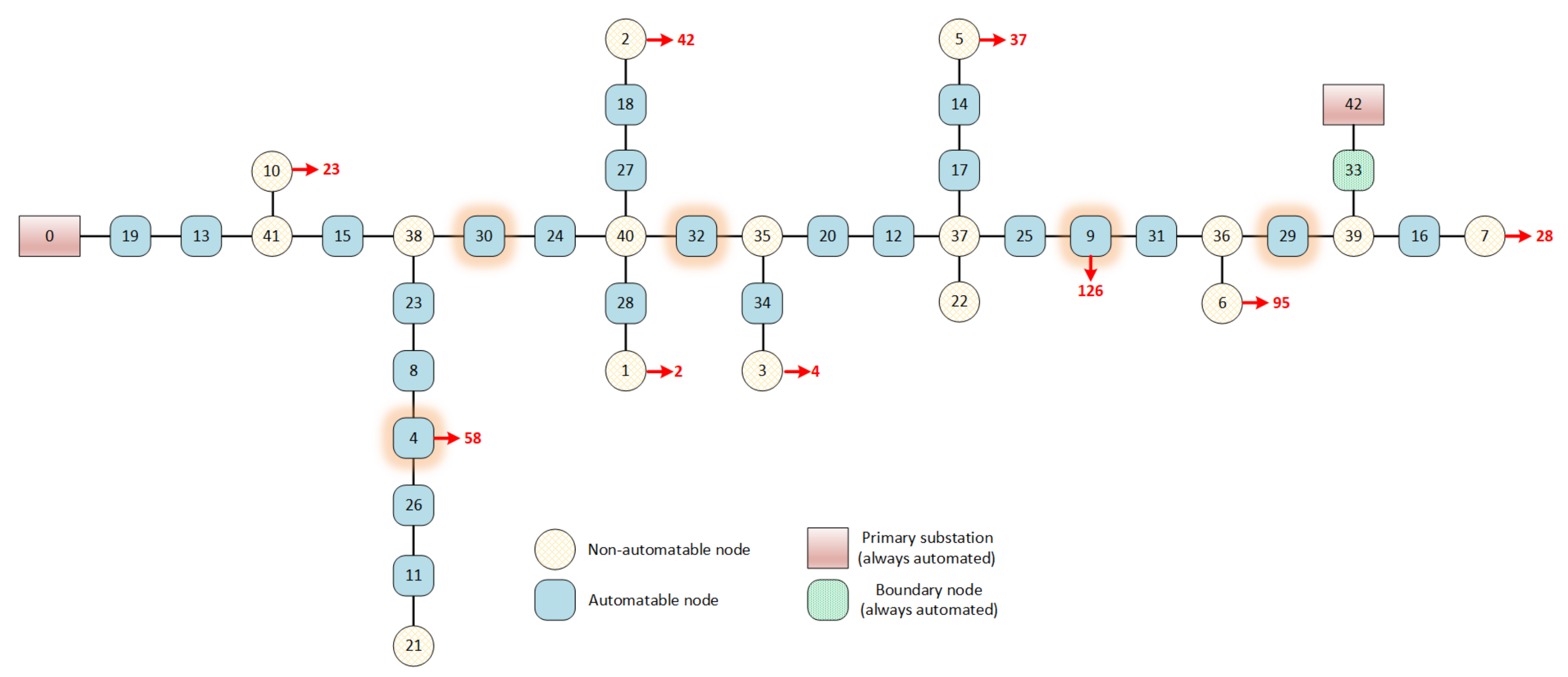
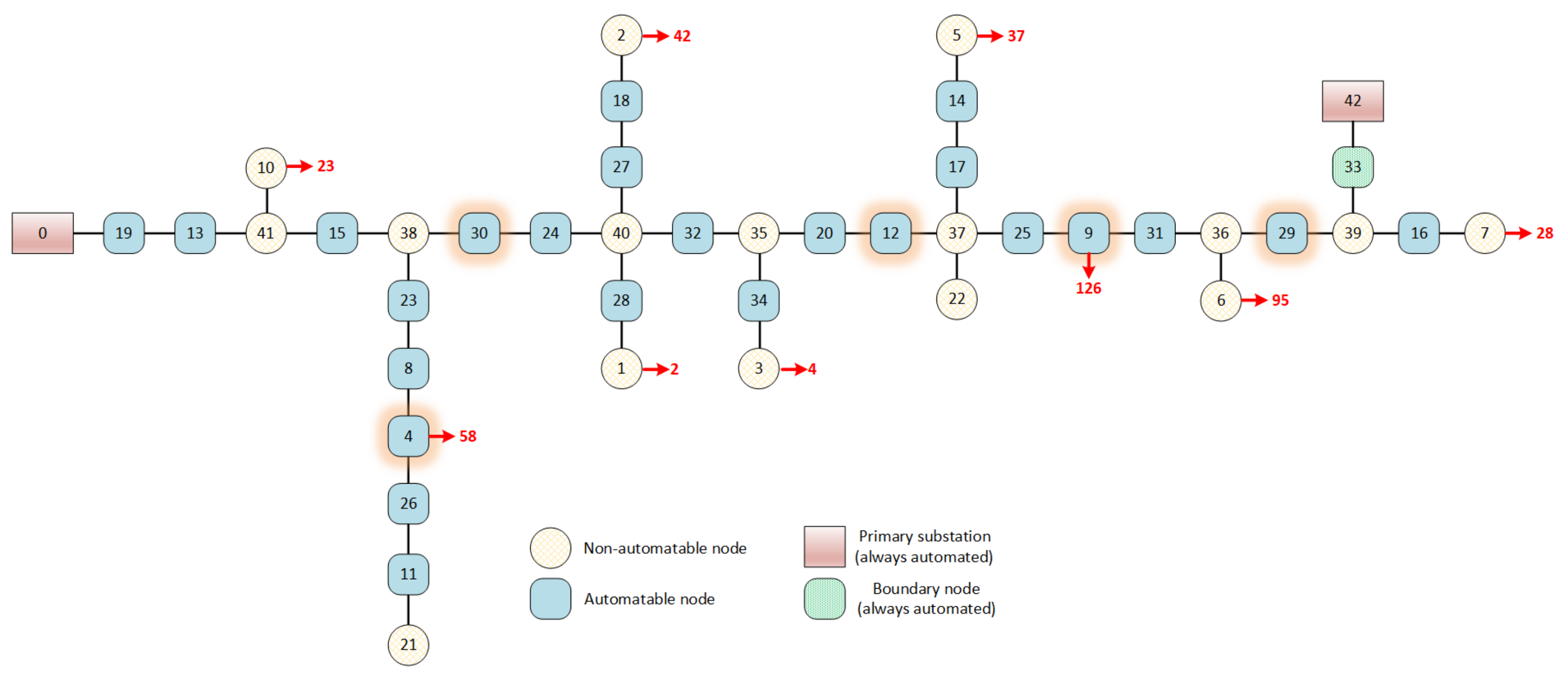
In the considered example, it was assumed that all the substations were automated in accordance with an SFS approach. It is understood that enabling SFS automation for all the nodes of the grid would represent an unsustainable expense for the electricity distributor. Moreover, the greater the number of IEDs in the line, the higher the number of exchanged messages during a fault; the technological limits of the transmission medium impose a maximum number of IEDs that can be installed. A feasible solution involves automating only some nodes of the network.
In
Figure 4, the same line of
Figure 3 has been considered, with the same fault, but only substations SS1 and SS4 are automated. In this case, the IED in SS1 senses the fault current and sends the Blind message to PS. After the waiting time has elapsed, the IED in SS1 has not received any Blind message (because SS2 is not automated) and commands the opening of the output breaker SSB. At the same time, the IED in SS1 transmits the Open message to the nearest automated substation downstream of the fault, i.e., SS4, which opens its input SD. Then the closure of the border switch for the re-powering is also commanded. In the current configuration, substations SS1 and SS4 are powered, while SS2 and SS3 are not powered.
In general, after a fault, the entire section between the two automated substations upstream and downstream of the fault remains disconnected. In the section between the two automated substations SS1 and SS4, the localization of the fault is carried out by commanding the SDs from the Operating Center or through the manual operation of the maintenance team, according to an algorithm based on dichotomy similar to that executed in FRG technique. The final result is the same—all users are powered and the section between SS2 and SS3, where the fault has occurred, is isolated. However, in this case, consumers powered by SS2 and SS3 experience a longer interruption, with a worsening of the quality of service indicators.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}