2.1. Design Return Period
High-magnitude earthquakes have low probability of occurrence but high-risk events for offshore wind farms, given their increasing role in developing renewable power generation and energy supply. Typical return periods of large earthquakes may be greater than 500 years. Offshore wind turbines are currently designed for a lifespan up to 30 years [
17]. Therefore, it is necessary to assess and manage the seismic risk within the design life of the structure.
Most existing standard of practices for ordinary structures use a 475-year return period. The design return period corresponds to a 10% probability of exceedance in 50 years [
17], where the assumed lifespan of a typical structure is taken as 50 years. The 475-year return period has an approximately 5% probability of exceedance when the time window of 50 years is shortened to 25 years.
Depending on the requirements, such as lower OPEX cost, several limit states need to be verified [
18]. It is worth noting that owing to the high costs in repairing and/or replacing the components of offshore wind turbines, the seismic design needs to ensure the structural integrity and functionality of the structure and other critical components, notably blades, gear boxes, etc.
Codes of practice often consider the economic impact through the possible consequences of failure. For example, Eurocode 8 [Part 1] [
19] recommends two different levels, namely: ultimate limit state (ULS) and serviceability limit state (SLS) (a) ULS-no collapse representing 10% exceedance probability in 50 years (i.e., 475-year return period); (b) damage limitation—10% exceedance probability in 10 years (i.e., 95-year return period).
In designing ordinary structures, if a particular seismic code is adopted, it is assumed that the structure will be subjected to some form of damage during its lifetime to enable some dissipation of energy while allowing the safe evacuation of its occupants as offshore wind turbines are most of the time unmanned, the limit states used for ordinary and manned structures may lead to an overly conservative design and excessive costs. Therefore, customized requirements for offshore wind farms may be necessary and should be agreed in the contract.
Table 2 provides a few examples of typical requirements. However, the list is by no means exhaustive, and further work is underway to describe these and bring out criteria for seismic design. When both the probability of exceedance and the lifetime of the structure are defined, it is possible to calculate the return period to be used in the seismic hazard analysis (SHA).
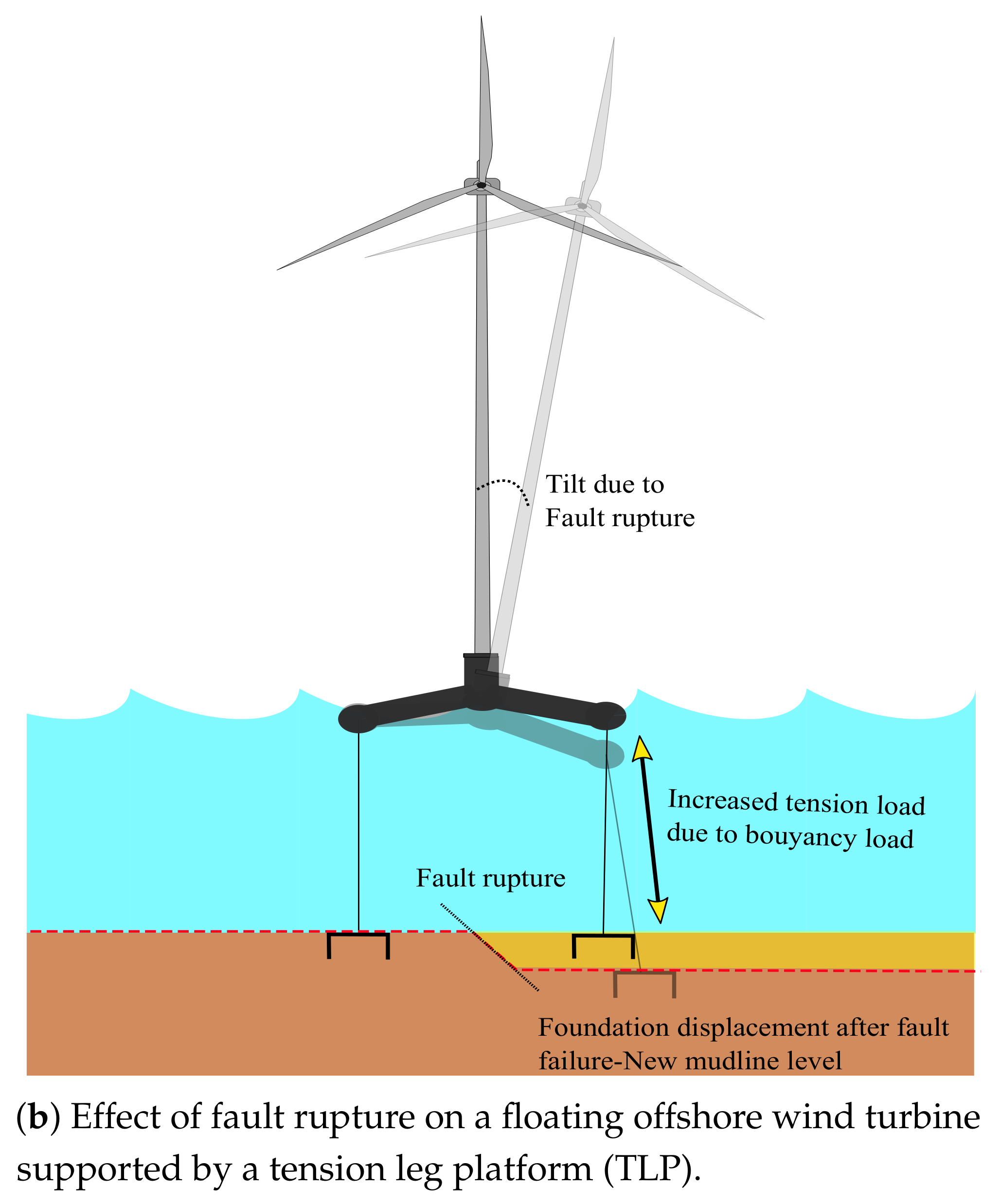
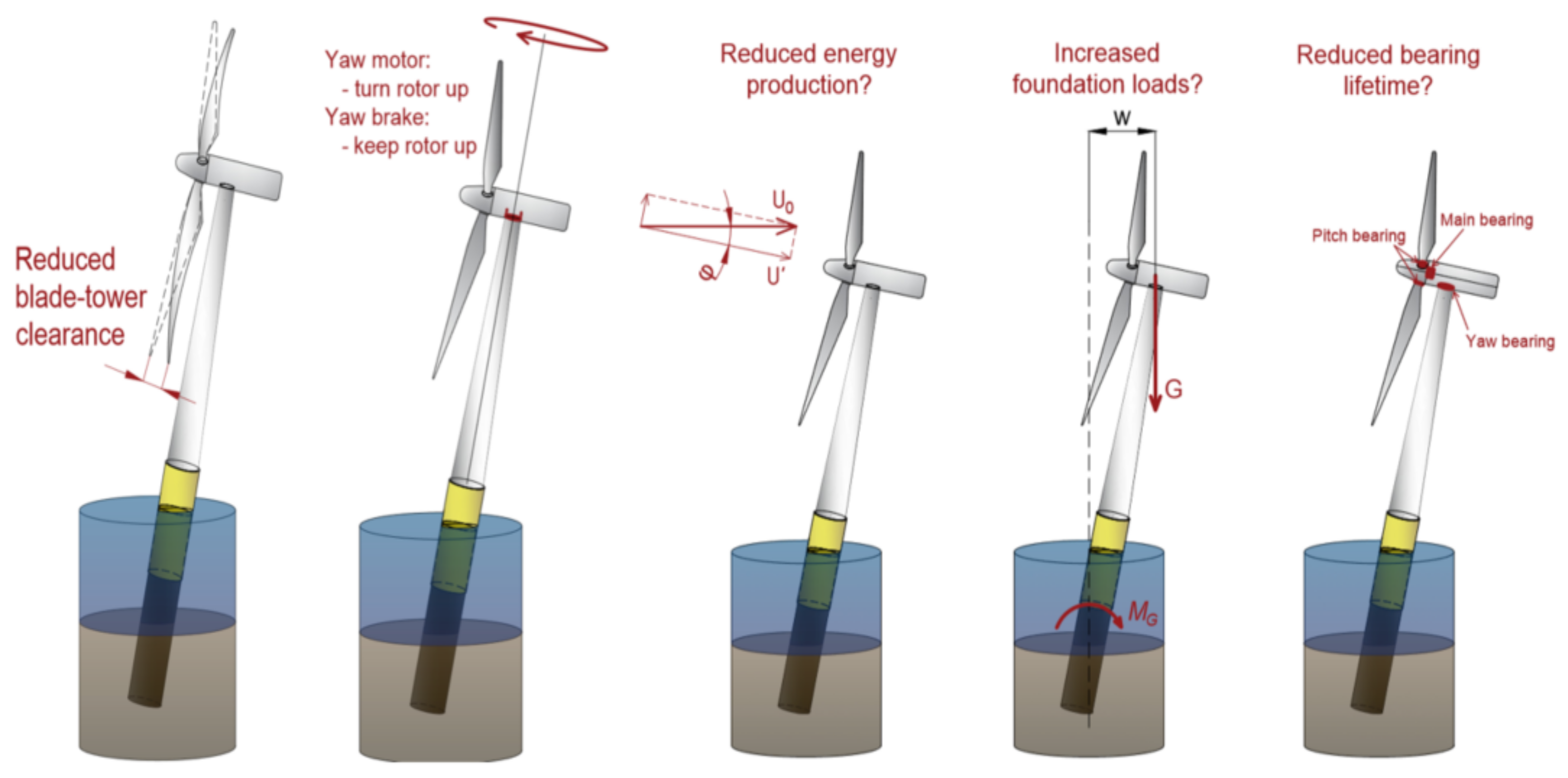
As most offshore wind turbine foundations consist of a large diameter steel pile, referred to as monopile, it is important to discuss the SLS criteria for this particular foundation type. One of the important design aspects of monopiles for offshore wind turbines is the allowable tilt permitted. The current allowable tilt is 0.5 to 0.75 degrees, and even post-seismic, this requirement must also be adhered to. It is of interest to highlight the possible reasons for stricter SLS and is shown schematically in
Figure 8, and the readers are referred to Chapter 3 of the book [
3] for further details. A larger tilt may reduce blade–tower collision, increased wear and tear of bearings and increased loads transmitted to the foundation.
2.2. Seismic Hazard Assessment
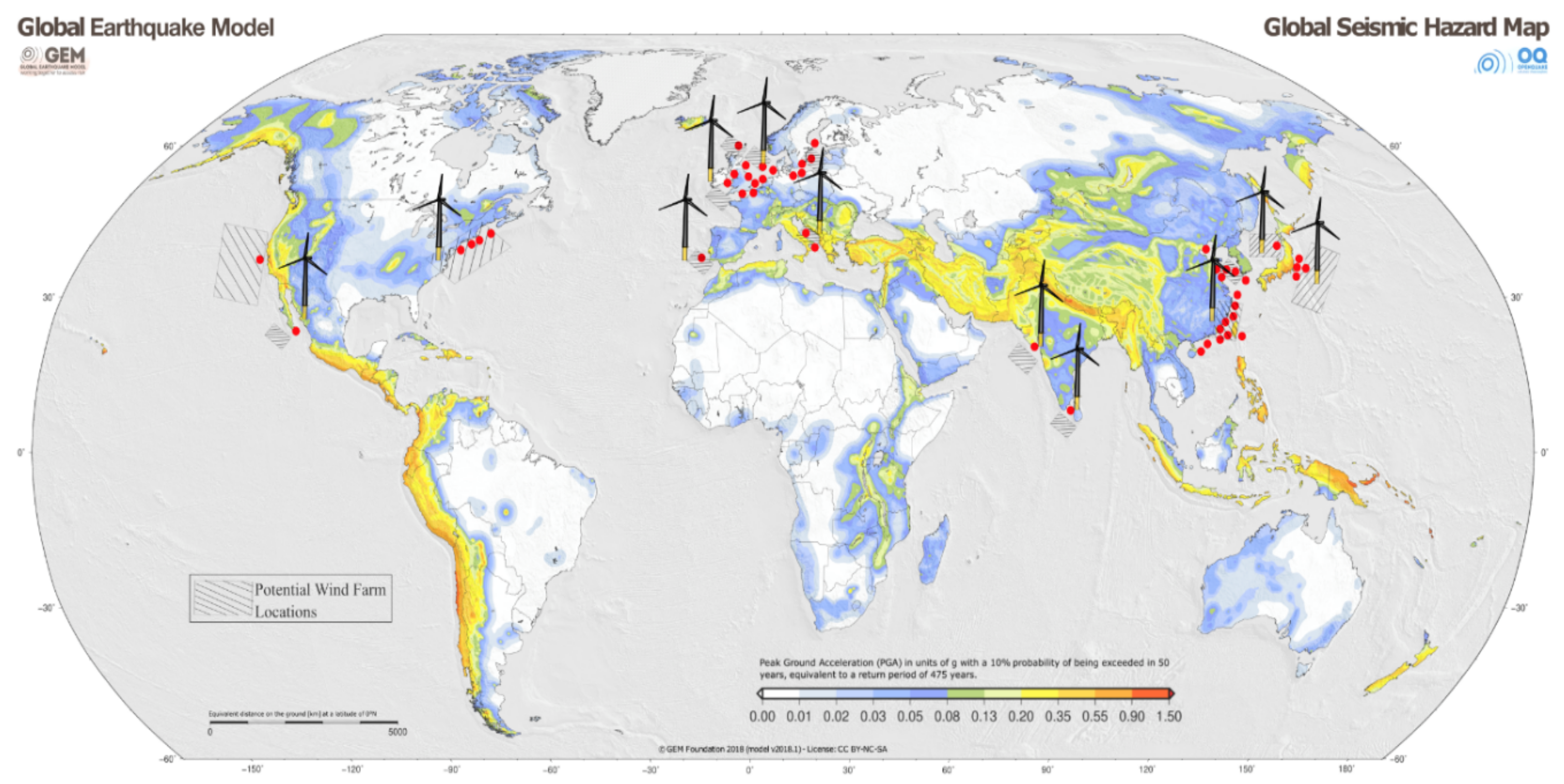
Seismic hazard assessment (SHA) determines the probability of exceedance of ground motion intensity parameter, often expressed in terms of peak-ground acceleration (PGA) or spectral acceleration (SA). Seismic hazard assessments can be classified into two categories: (i) probabilistic seismic hazard analysis (PSHA) and (ii) deterministic seismic hazard assessment (DSHA). Both procedures require similar inputs, i.e., compilation of seismic catalog, the definition of seismic source and ground motion models. These hazards also differ in some fundamental aspects, most importantly in the treatment of uncertainties and the characterization.
Figure 9 shows the main steps of a typical PSHA; these are briefly discussed hereafter:
Step 1—Definition of seismic source model: this step consists of compiling an earthquake catalog that lists all known historical and instrumented earthquakes in the study region. The catalog is used to build the seismic source model that defines the spatial distribution of all the seismic sources that contribute to the hazard at the site.
Step 2—Definition of earthquake recurrence law: this defines the rate of earthquake occurrence for each seismic source. The Gutenberg–Richter (GR) recurrence law is often adopted for recurrence models. As the GR law may produce an unrealistically large earthquake, it is often truncated to the maximum possible magnitude that the seismic source can produce.
Step 3—Definition of ground-motion model: it consists of quantifying the earthquake’s intensity in terms of parameters of engineering interest, such as peak ground acceleration (PGA), spectral accelerations, etc. These are computed based on empirical ground-motion prediction equations (GMPEs), which are evaluated from regression analysis of a large set of records. Although different GMPEs have been developed and are available for regions of different seismicity, all provide the distribution of the ground motion parameter as a function of several independent variables such as earthquake size (e.g., magnitude), source to site distance, type of faulting and possibly geotechnical parameters that characterize the soil conditions at the site. Owing to the inherent randomness of the seismic process and epistemic uncertainty in the models, multiple GMPEs are normally used in a logic tree with appropriate weights.
Outputs—A typical PSHA is often presented through a suite of curves, known as seismic hazard curves, which represent the average annual rate of exceedance of a given ground motion intensity measure for different response periods. Since the earthquake occurrence is modeled as a Poisson process, the average annual rate,
, can be expressed in terms of the probability of exceedance,
P, and time period,
t, such that
from which it follows that a probability of exceedance of 10% (
P = 0.1) in 50 years (T = 50) corresponds to an average annual rate of 0.002 or return period (which is its inverse, i.e., 1/
) of approximately 500 years.
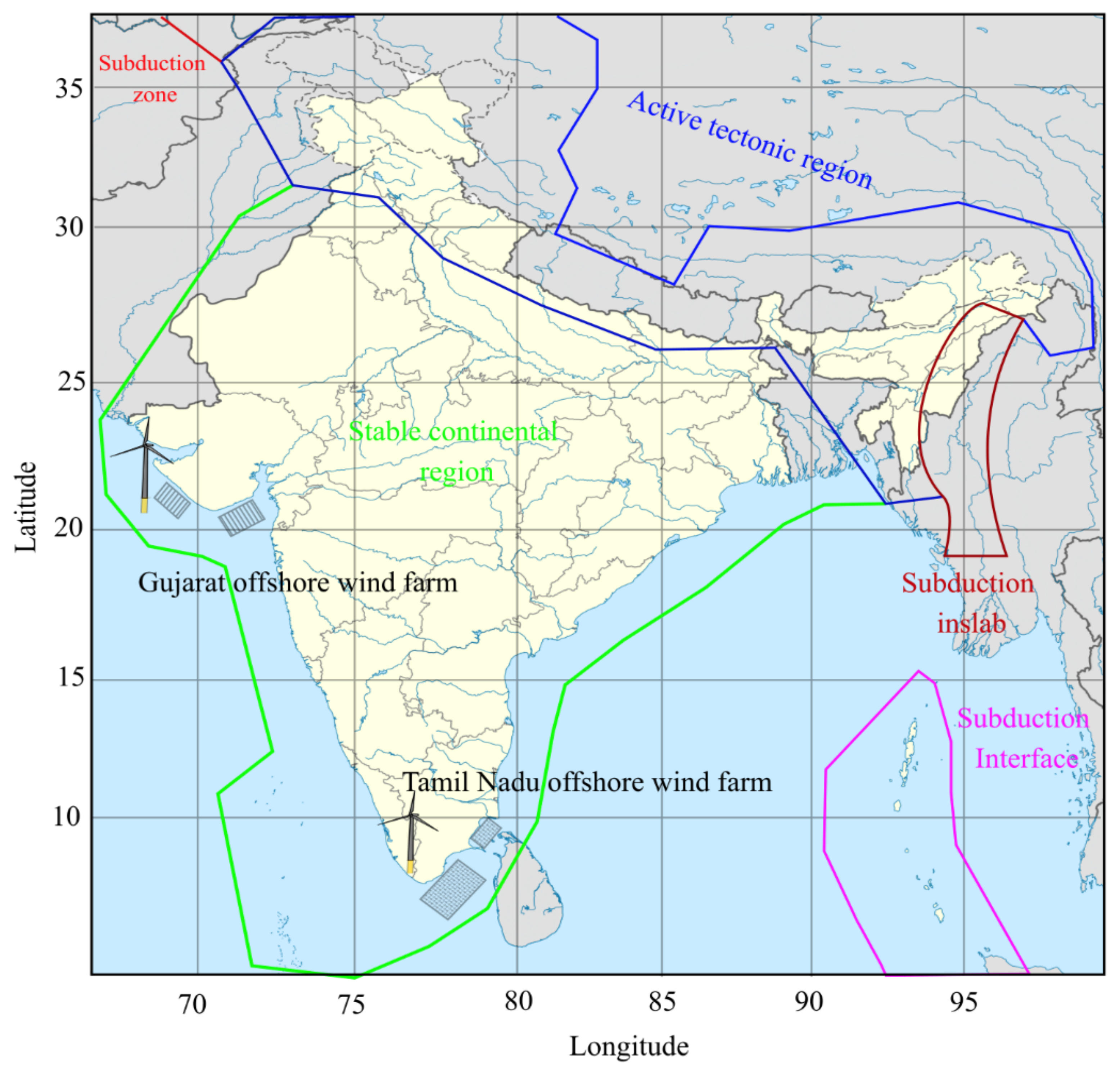
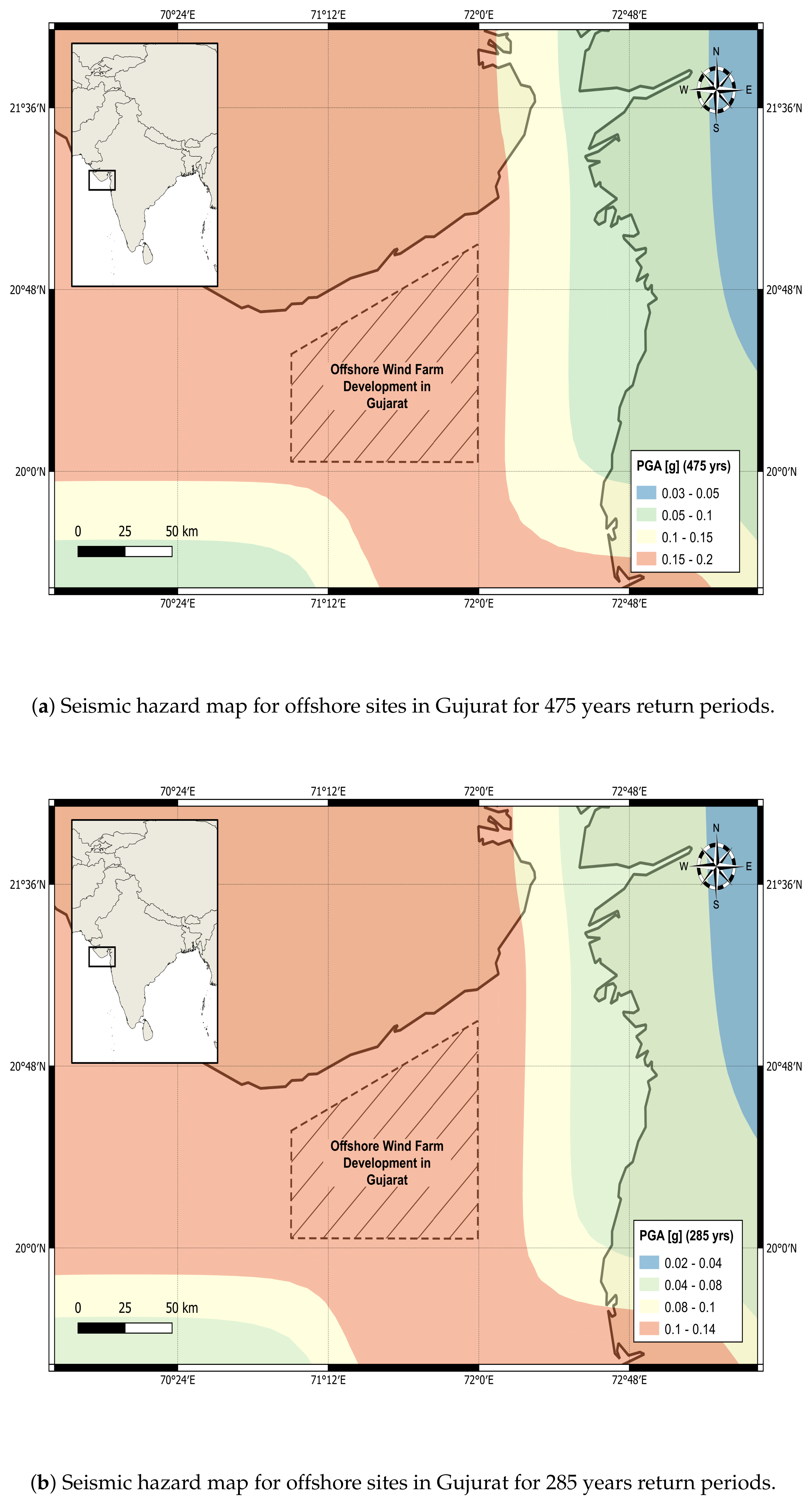
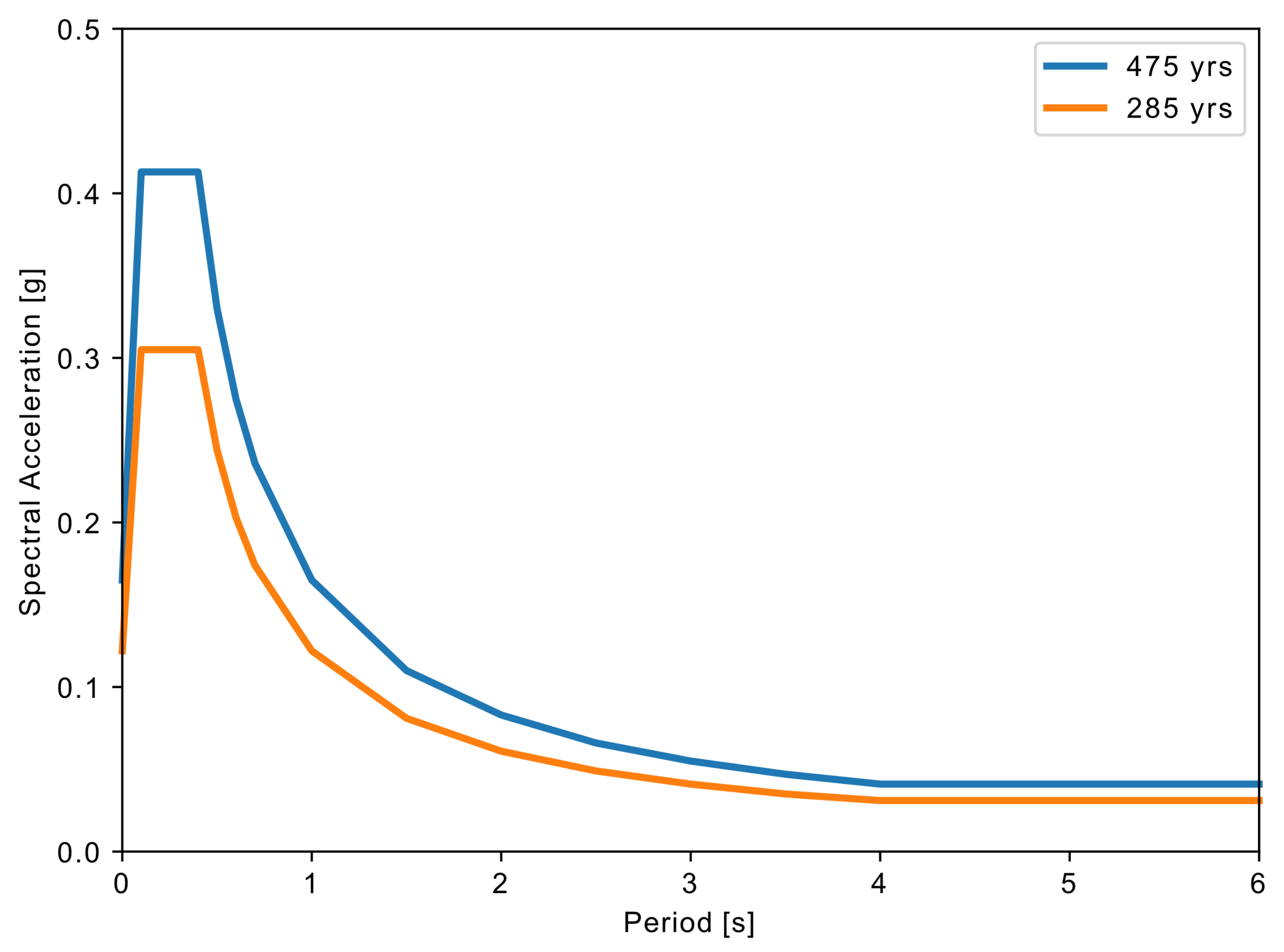
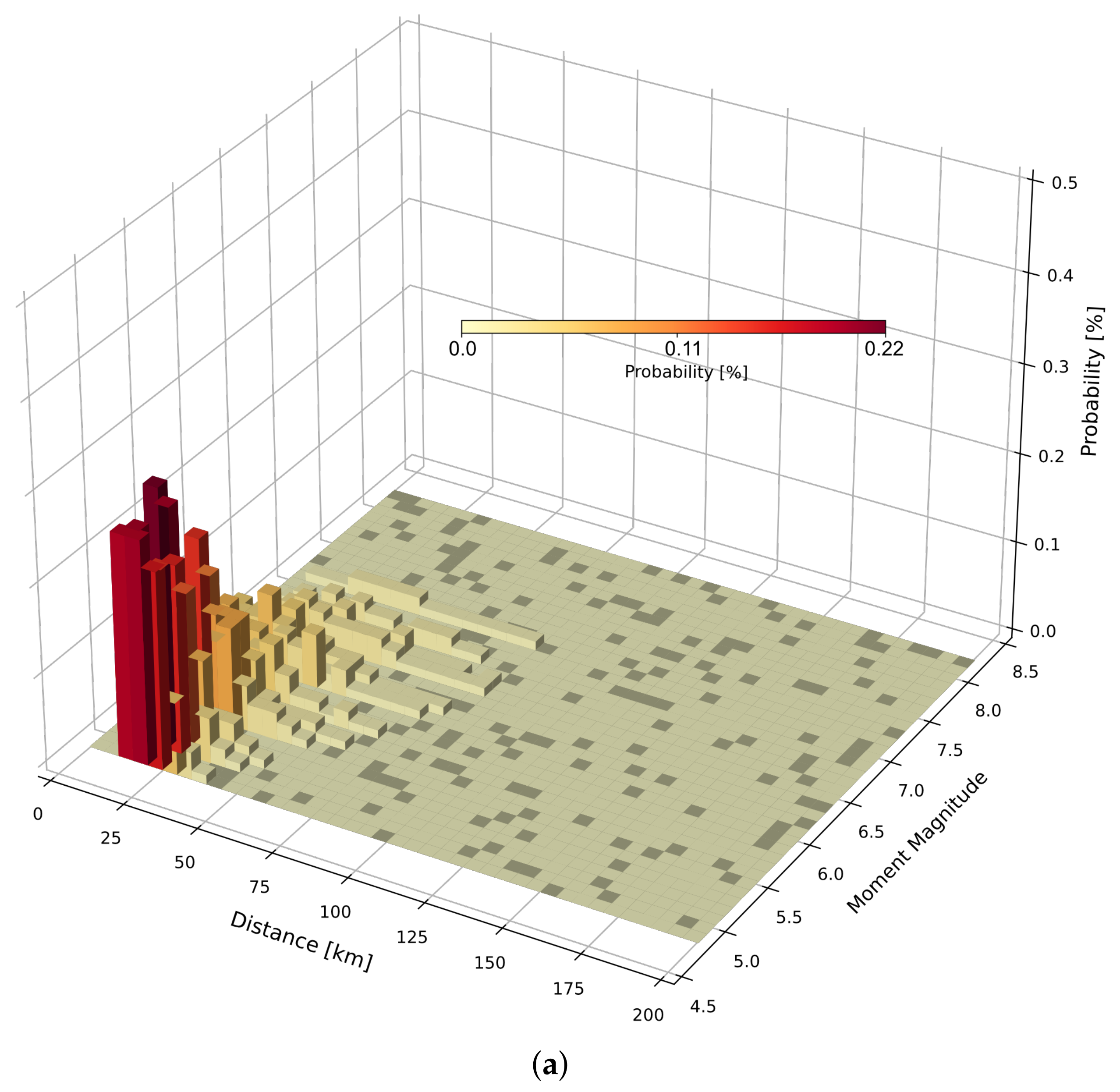
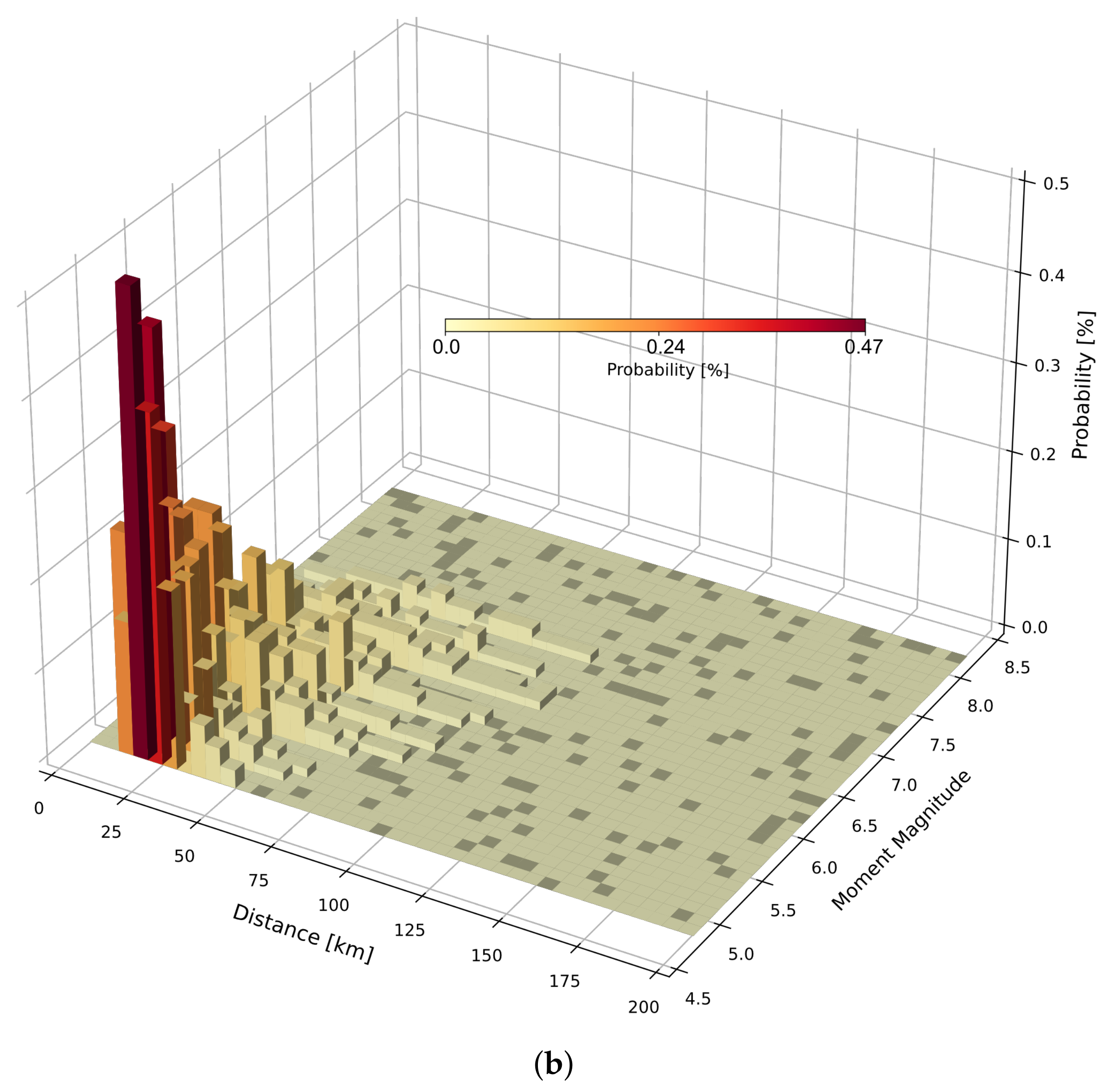
The main findings from a PSHA can be used to determine the spatial distribution of the hazard or compute the so-called uniform hazard spectrum (UHS). Since the PSHA “aggregates” various earthquake scenarios, the resulting hazard cannot be related with any real earthquake. The disaggregation analysis provides an artificial seismic scenario, expressed in terms of magnitude–distance–residual, which contributes the most to the hazard. Once the worst-case scenario is defined, it can be used in the selection of compatible ground-motion records required as input in time–response analyses. An example of PSHA analysis for an offshore site in India is provided in
Appendix A.
The deterministic seismic hazard approach (DSHA) can be considered as a special case of the probabilistic seismic hazard assessment (PSHA). Specifically, in the DSHA the most damaging scenario is considered, the so-called the worst-case scenario, which is defined in terms of magnitude and source-to-site distance regardless of its frequency of occurrence. It is worth noting that both methodologies present limitations based on the simplifying assumptions they rely upon and the degree of subjectivity involved in the process.
Due to its simplicity when compared to the PSHA, the DSHA can be performed in the early stages of the project for feasibility studies and preliminary designs. From the collection of historic seismic events, it is possible to find the maximum magnitude and the minimum distance of the wind farm from active seismic faults. Subsequently, using ground motion prediction equations (GMPEs) suitable for the specific case study, the average expected intensity measurements and their variability can be ascertained. It is important to state that PSHA in low-to-moderate seismic regions may be challenging due to the paucity of strong motion data, especially offshore, and more detailed studies may have resulted in lower cost–benefit ratios.
2.4. Ground-Motion Selection for Time–History Analyses
Earthquake scenarios are defined by the seismotectonic features such as magnitude, distance, local site conditions and the type of fault mechanisms (e.g., strike-slip and normal fault). These parameters tend to affect the spectral content of the ground motion records. Two potential approaches are possible for scenario-based selection. If DSHA is used, it is required to define a design critical earthquake scenario for a given site considering the characteristics of the earthquake rupture of the identified fault. On the other hand, if PSHA analysis is performed, it must utilize the seismic disaggregation results from the PSHA. If multiple scenarios have high contributions to the hazard, multiple scenarios should be taken into consideration [
22].
On the other hand, response spectrum matching methods aim to match both the ground motion intensity and frequency content of the accelerograms to the target spectrum. For spectrum matching, the target response spectrum is often the design code spectrum [
23]. This selection method is based on the comparison of a candidate response spectrum with the target response spectrum. The matching is usually calculated using as a reference the differences between the spectral ordinates of the reference spectrum and the spectrum of the candidate ground motion. Such a difference is usually evaluated over a vibration period range. This period range should ideally cover the relevant vibration periods of the offshore wind turbine structure under scrutiny. In this regard, Eurocode 8 [
19] suggest a range of 0.2 times to 2 times the first vibration period. Furthermore, EC8 suggests that the average spectrum of seven records needs to be larger than 90% of the target spectrum, which avoids underestimation. A further upper-bound criterion can also be implemented to avoid dispersion of the results.
Ideally, the target spectrum should be site-specific, and, therefore, the uniform hazard spectrum is desirable. It may be noted that different parts of the uniform hazard spectrum are governed by different earthquake scenarios. For example, moderate events at short distances tend to be dominant at shorter vibration periods, whereas large events at far distances tend to be more important for longer vibration periods. Furthermore, when UHS is used as the target spectrum, candidate records having similar spectral ordinates for the entire period range tend to be extreme.
A different approach for spectrum matching is the conditional mean spectrum (CMS) approach [
24] which is a combination of scenario-based and spectral-matching methods. In this method, only the spectral acceleration for a given period is provided. All the results coming from the disaggregation are obtained from the conditional mean spectrum and used as a reference for spectral matching. To control the dispersion, confidence intervals are generally adopted around the conditional mean spectrum.
Practically, it is hard to find natural records that can match a specific target spectrum. There are a couple of possible solutions in such cases: (a) Natural records from real events can be scaled to reach the matching. This scaling factor should not be excessively high. Otherwise, unrealistic combinations of amplitude and frequency contents may be obtained; (b) time histories can be simulated to obtain stochastic ground motions matching the hazard spectrum.
2.5. Combination of Seismic Actions
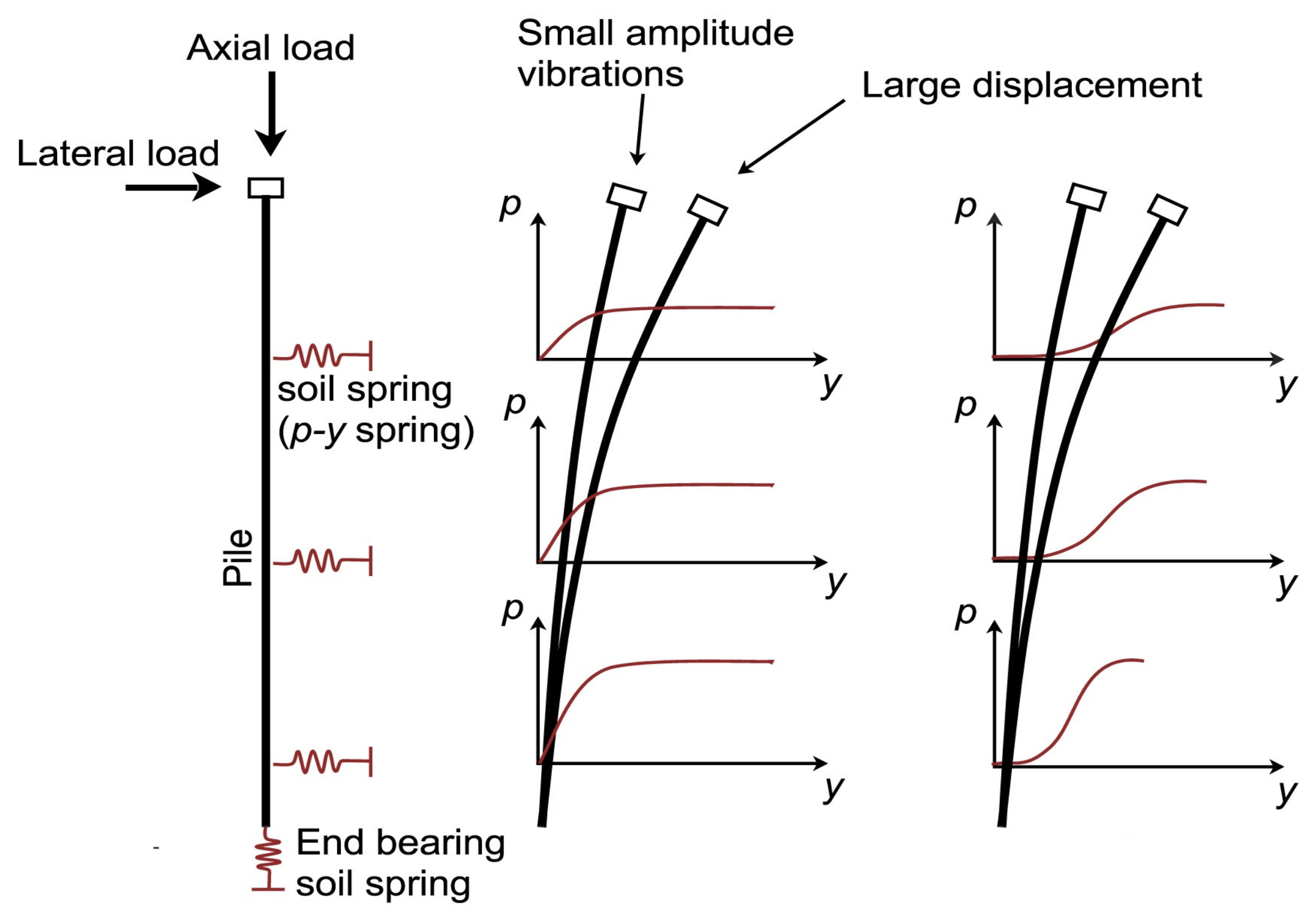
In practice, the beam on non-linear Winkler foundations (BNWF), also known as the p-y approach, is applied to model soil–structure interaction effect under seismic loading. Depending on the application of the earthquake input motion, two different types of analyses are possible. These are briefly discussed below.
2.5.1. Spatial Analysis
For spatial analysis, the ideal approach is to select seven earthquake events (i.e., 14 records comprising 7 pairs of strong motion recorded in two main directions of the instrument record station). These recorded data are applied to the structure along with the interchanging directions; hence, 14 separate analyses are possible. If the number of chosen events is larger or equal to seven, then the mean effects on the structure can also be considered; however, if the number is lower than seven, just the maximum effects should be considered (i.e., the envelope). If the record selection is not compliant with the bi-directional approach mentioned above (i.e., two-directional motions are not available), then similar data may be used identically in both directions, and suitable scaling factors may be adopted. Normally, there is no scaling in one direction, while the other direction is subjected to 30% of input motion. It is worth noting that this approach has an important as it ignores a possible phase difference of the ground motions in the two directions.
2.5.2. Planar Analysis (1-D Analysis)
In the planar model, two approaches may be used:
The strong seismic motion may be applied to the principal direction of OWT (i.e., along the direction of the predominant wind). It must also be assumed that wind and wave are collinear. The seismic motion may be scaled 1.4 times, which is essentially a square root of 2 considering two directions.
The strong seismic motion will be applied to the major principal direction of OWT (i.e., along the direction of the predominant wind). In a separate analysis, an additional component scaled to 30% may be applied in the minor principal direction. The response can be algebraically added. However, these methods are based on the superposition principle, which is strictly valid under the assumption of linearity.


 ,
, 






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}