
Dynamical Operation Based Robust Nonlinear Control of DC Microgrid Considering Renewable Energy Integration

 , , , and
, , , and
Abstract
:1. Introduction
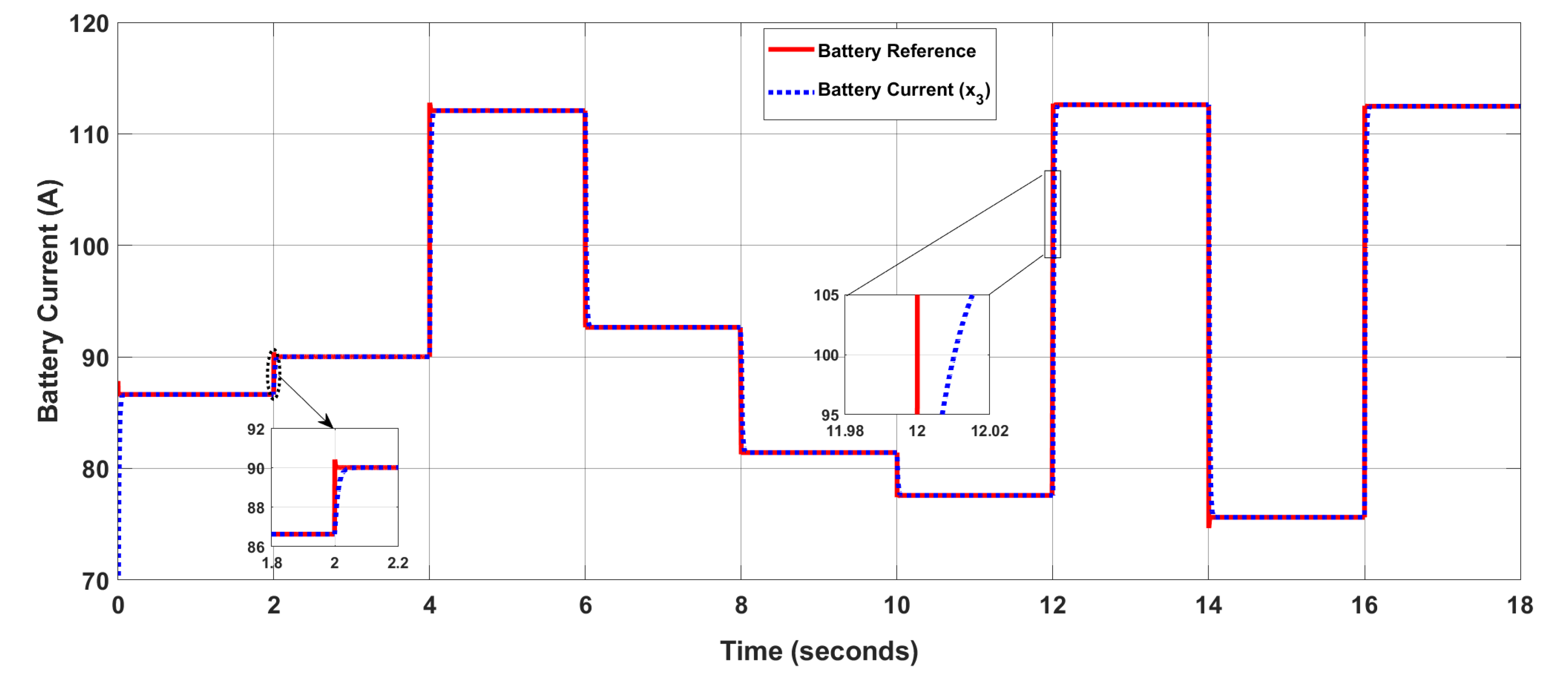
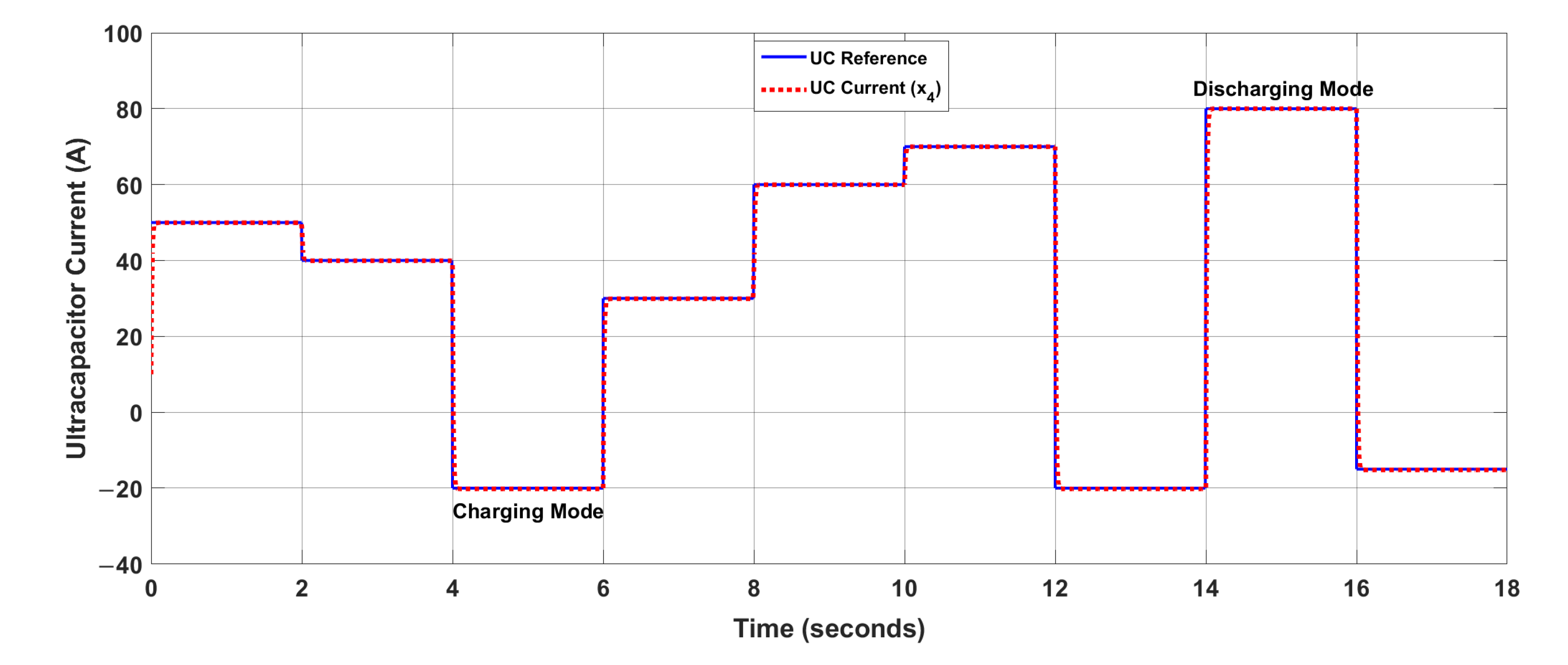
- Output voltage regulation at DC link and regulated charging and discharging profile for the primary and secondary sources irrespective of the variation in load demand and renewable energy source.
- Ensuring asymptotic stability of the DC microgrid under different operating conditions.
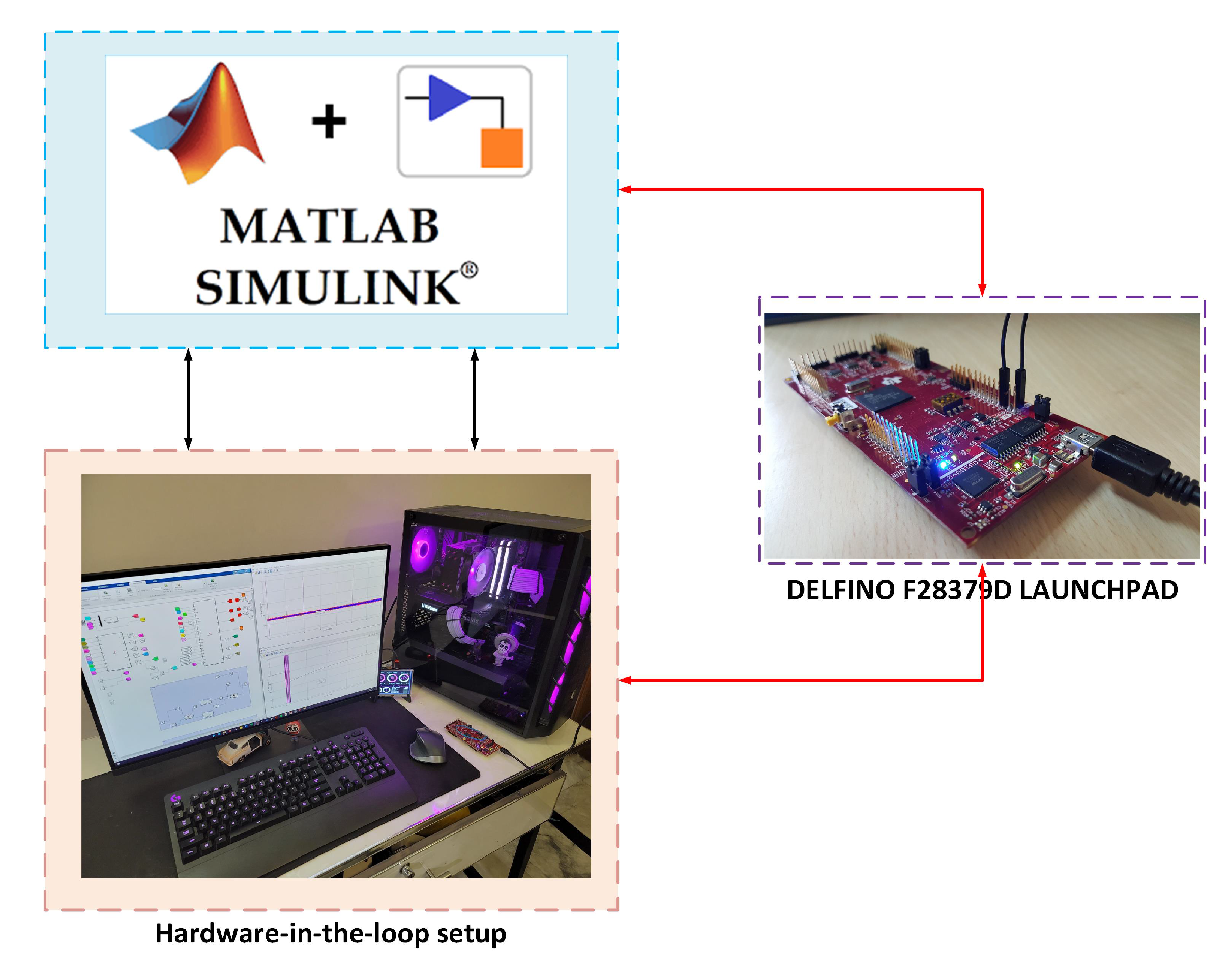
- Validate the effectiveness of the proposed system using controller hardware-in-the-loop setup.
- Estimation of the gains using a genetic algorithm for the optimal approximation of the controller gains.
2. Mathematical Representaion of DC Microgrid
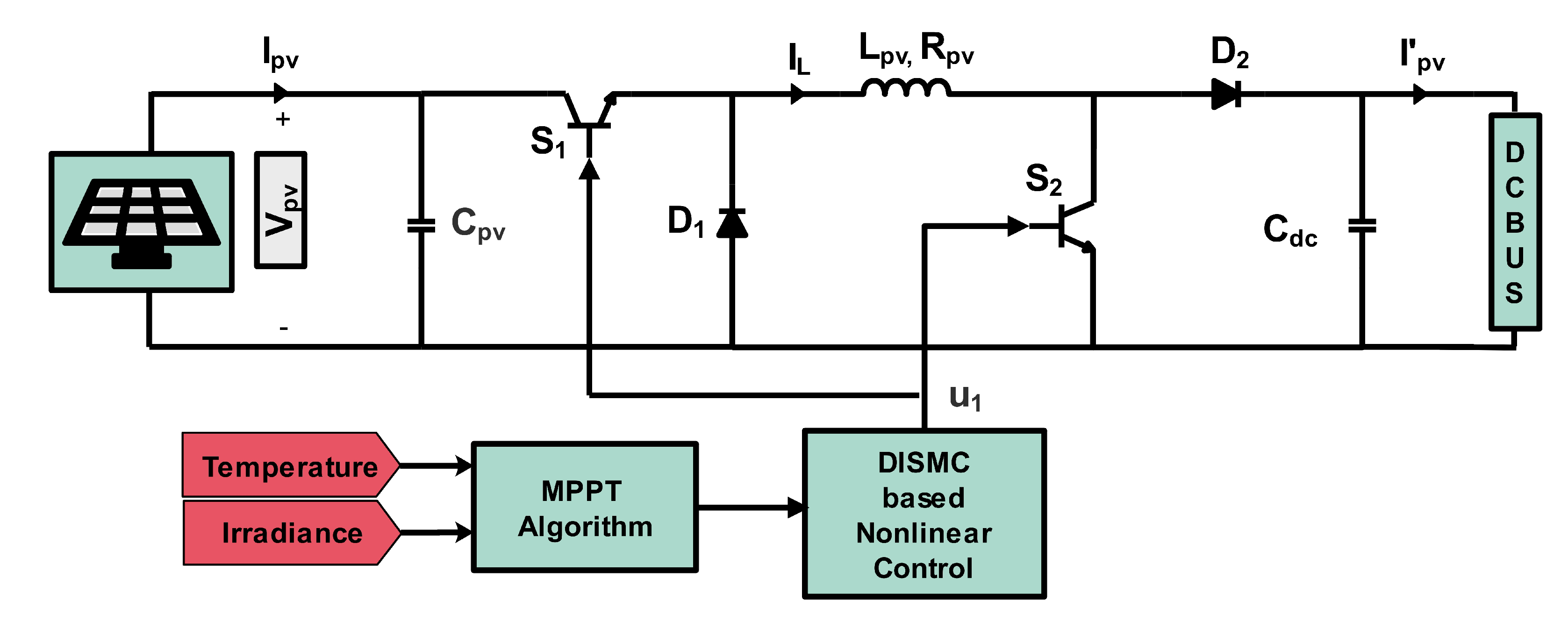
2.1. Modelling of PV Based Energy Generation System
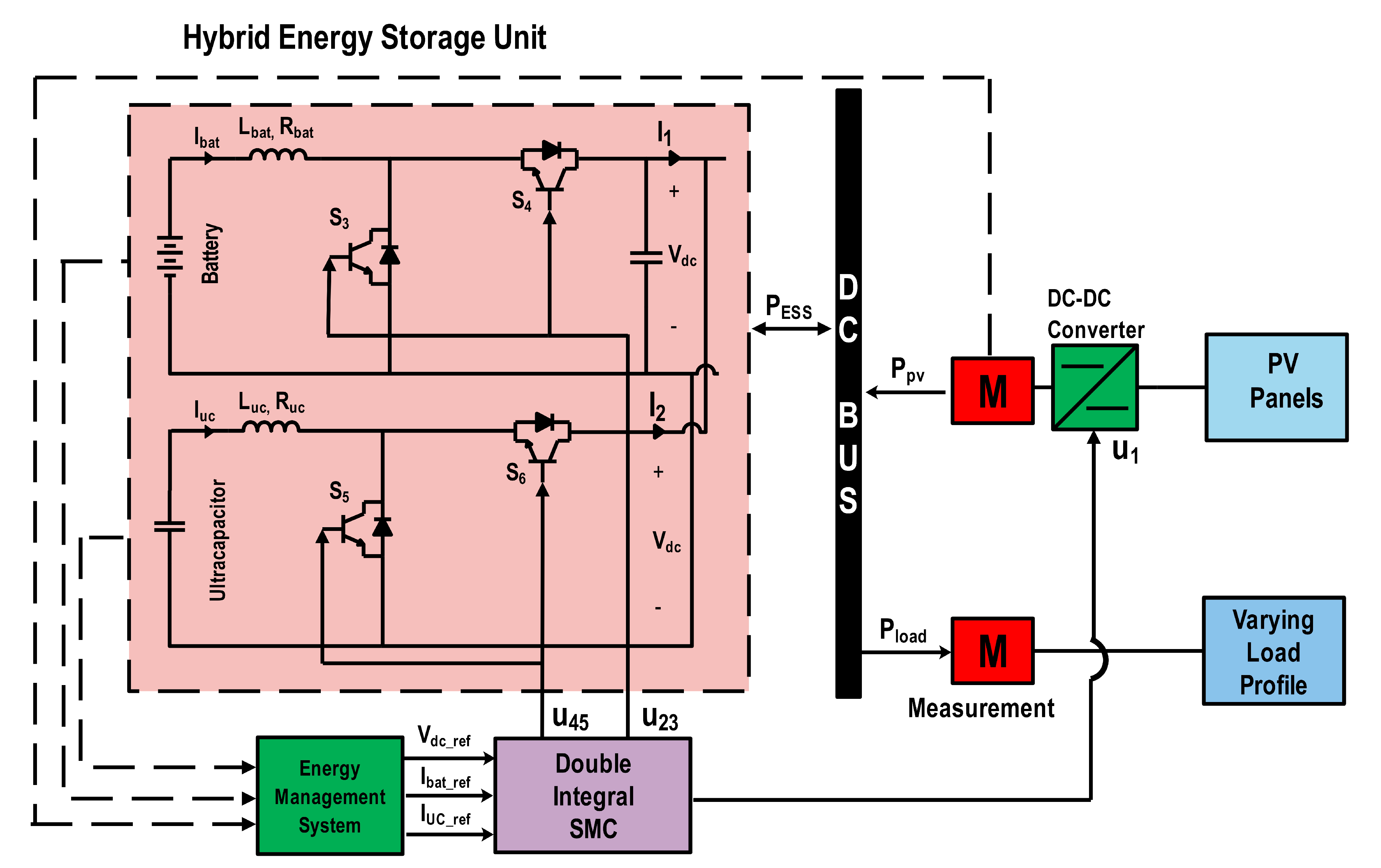
2.2. State Representation of Hybrid Energy Storage System
2.3. Global State Dynamical Model of DC Microgrid System
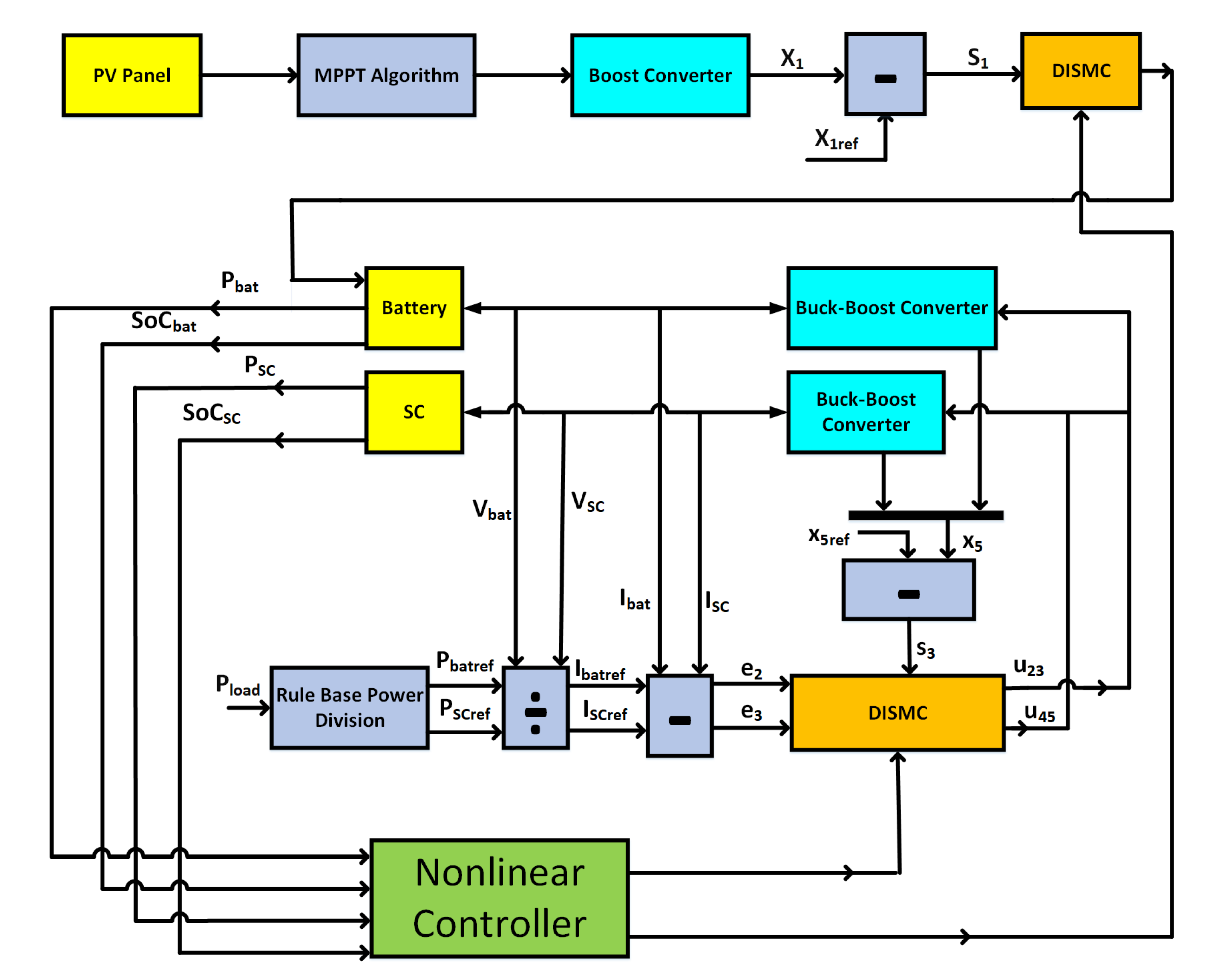
3. Nonlinear Double-Integral SMC-Based Controller
3.1. Controller Design of DC–DC Converter for Renewable Energy Source
3.2. Nonlinear Controller Design of DC–DC Converters for Hybrid Energy Storage System
3.3. Invariance and Stability Analysis
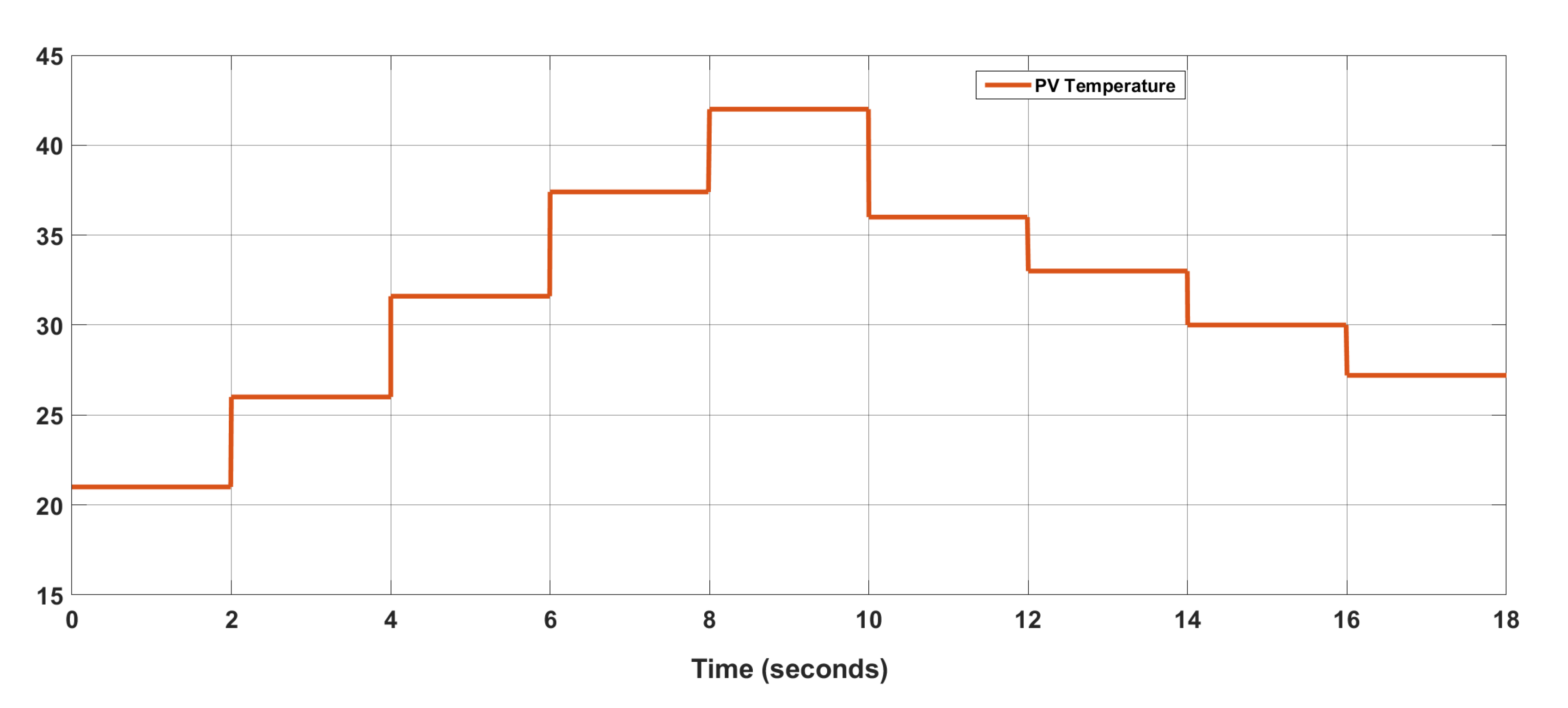
4. Simulation Results and Analysis
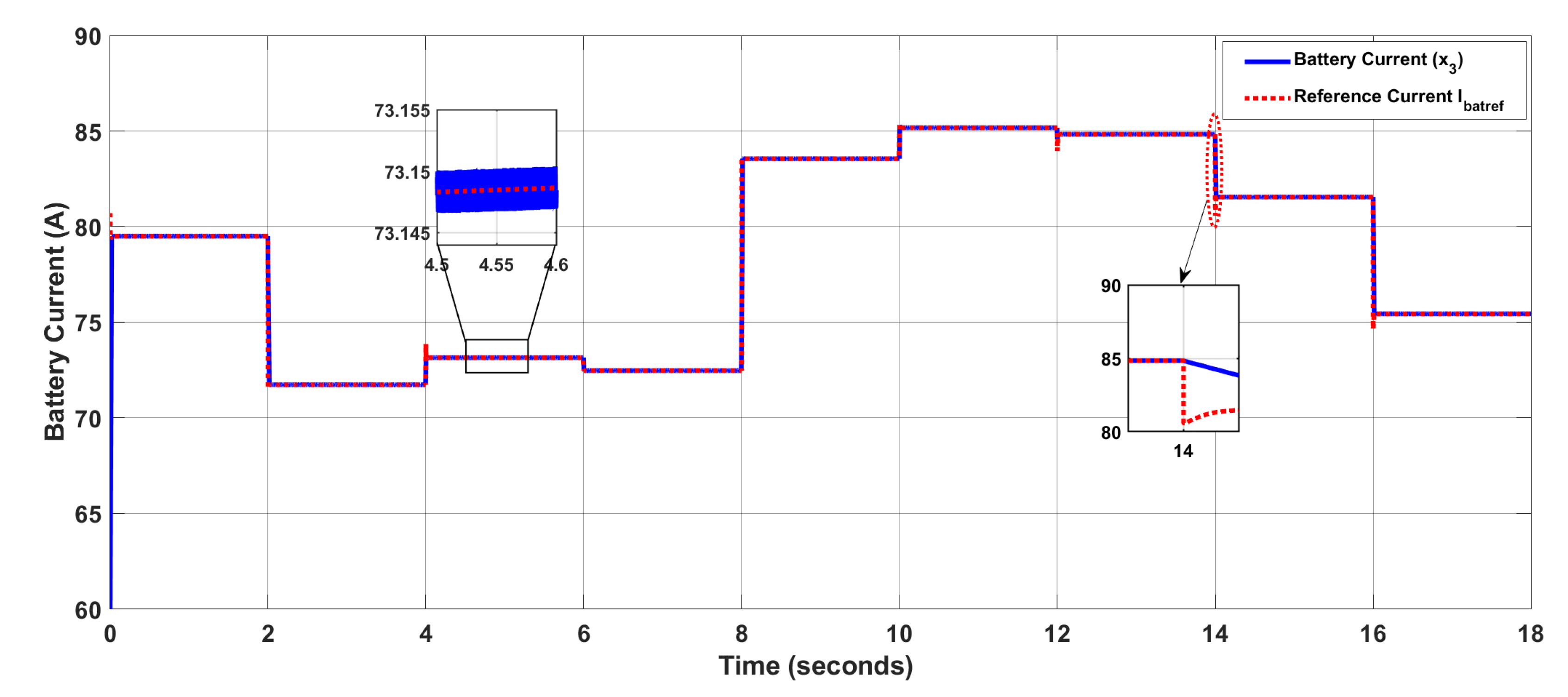
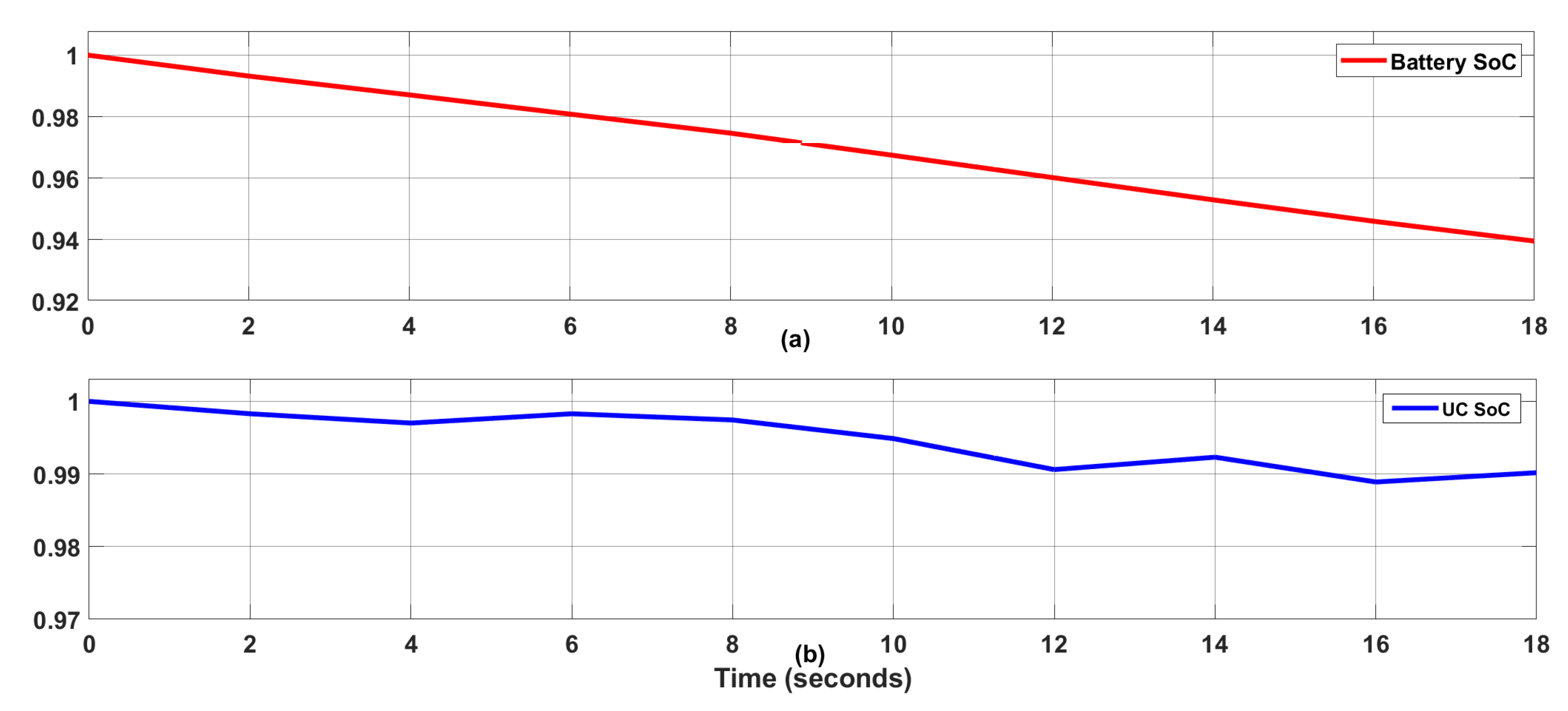
4.1. Results for Nonlinear Control of a Hybrid Energy Storage System
4.1.1. Case-I (Constant Load)
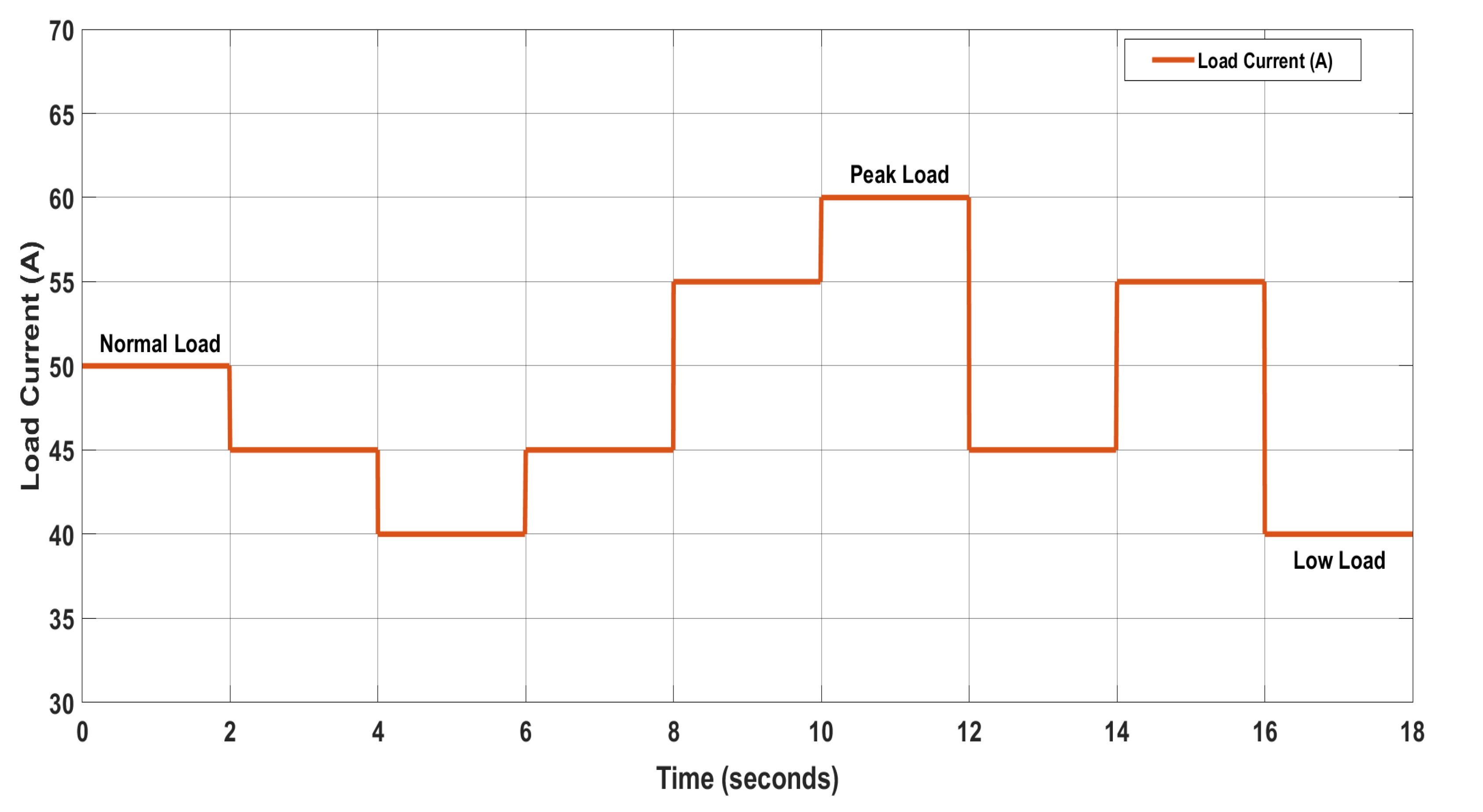
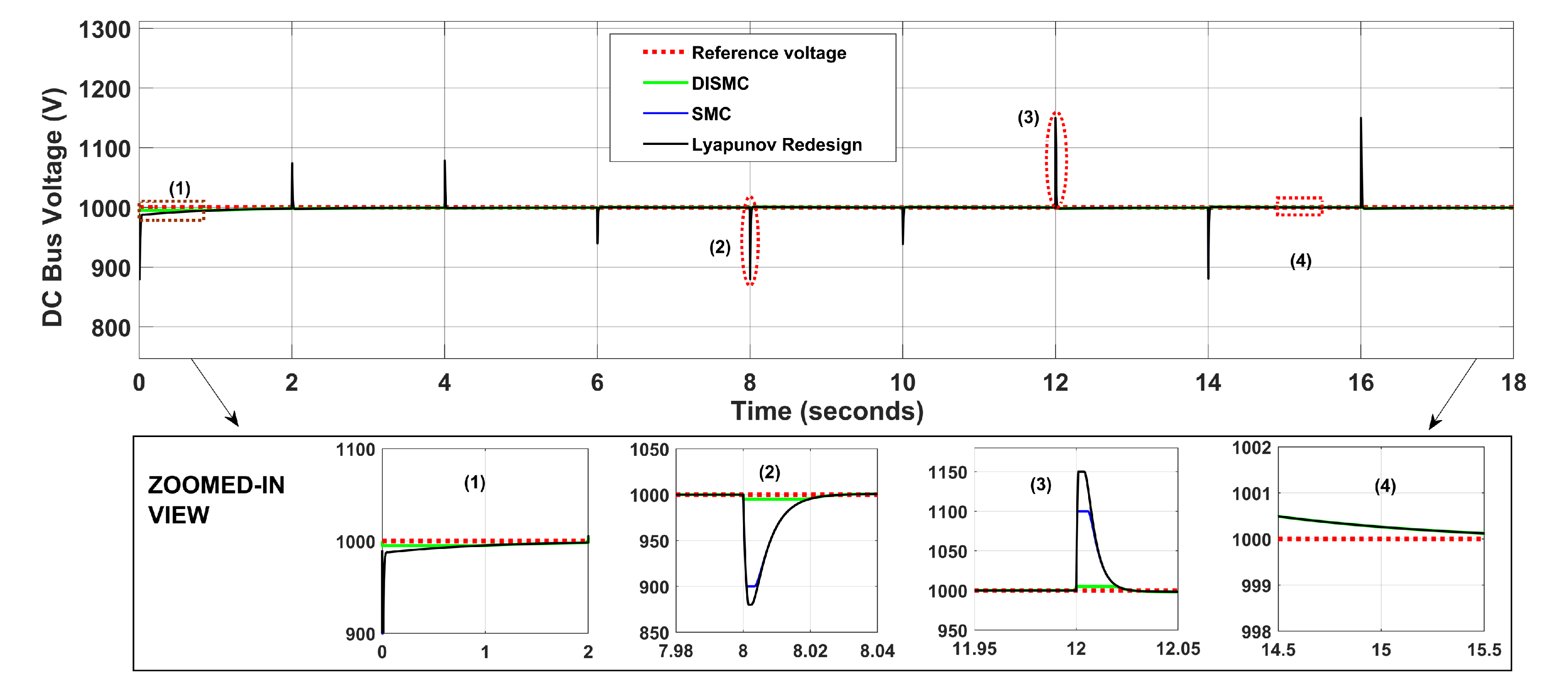
4.1.2. Case-II (Varying Load)
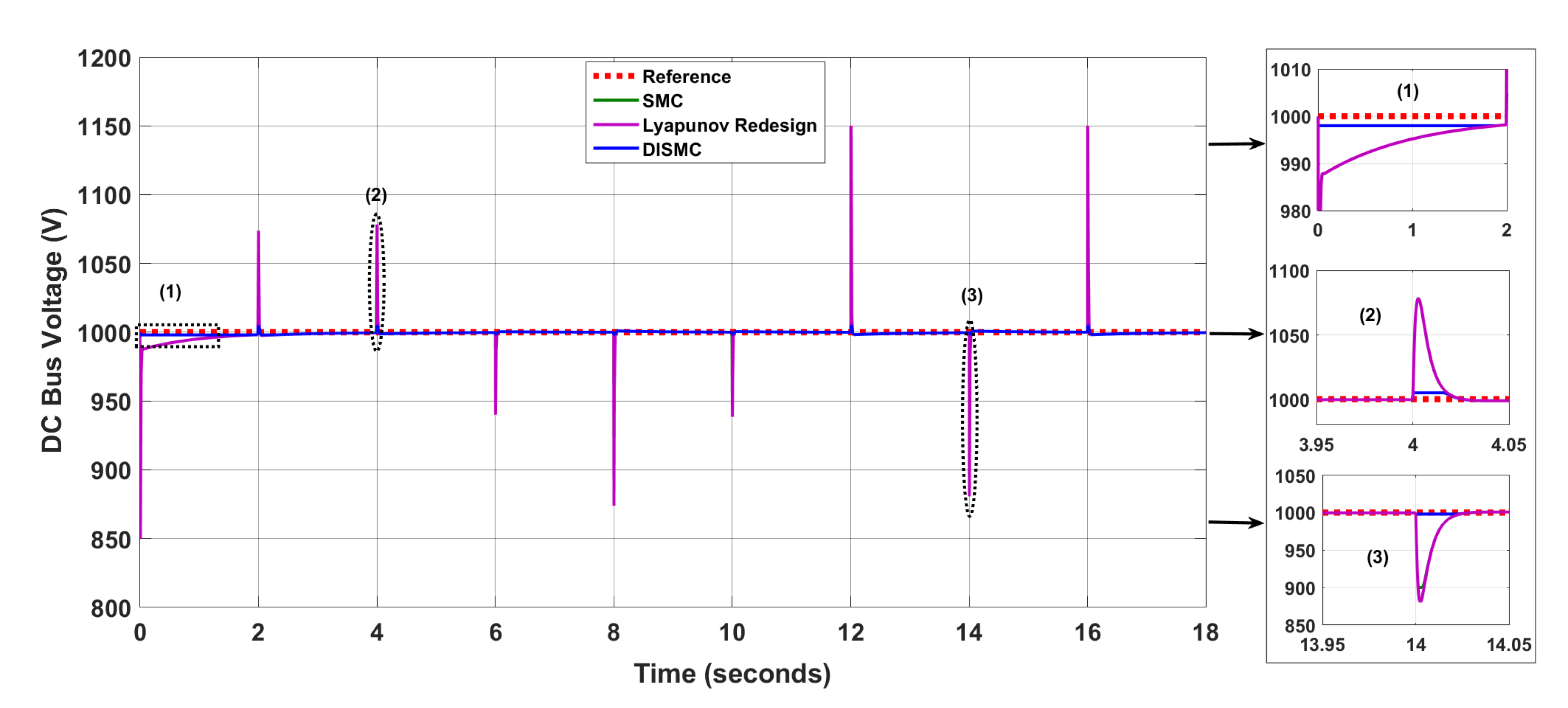
4.1.3. Controller Performance Comparison
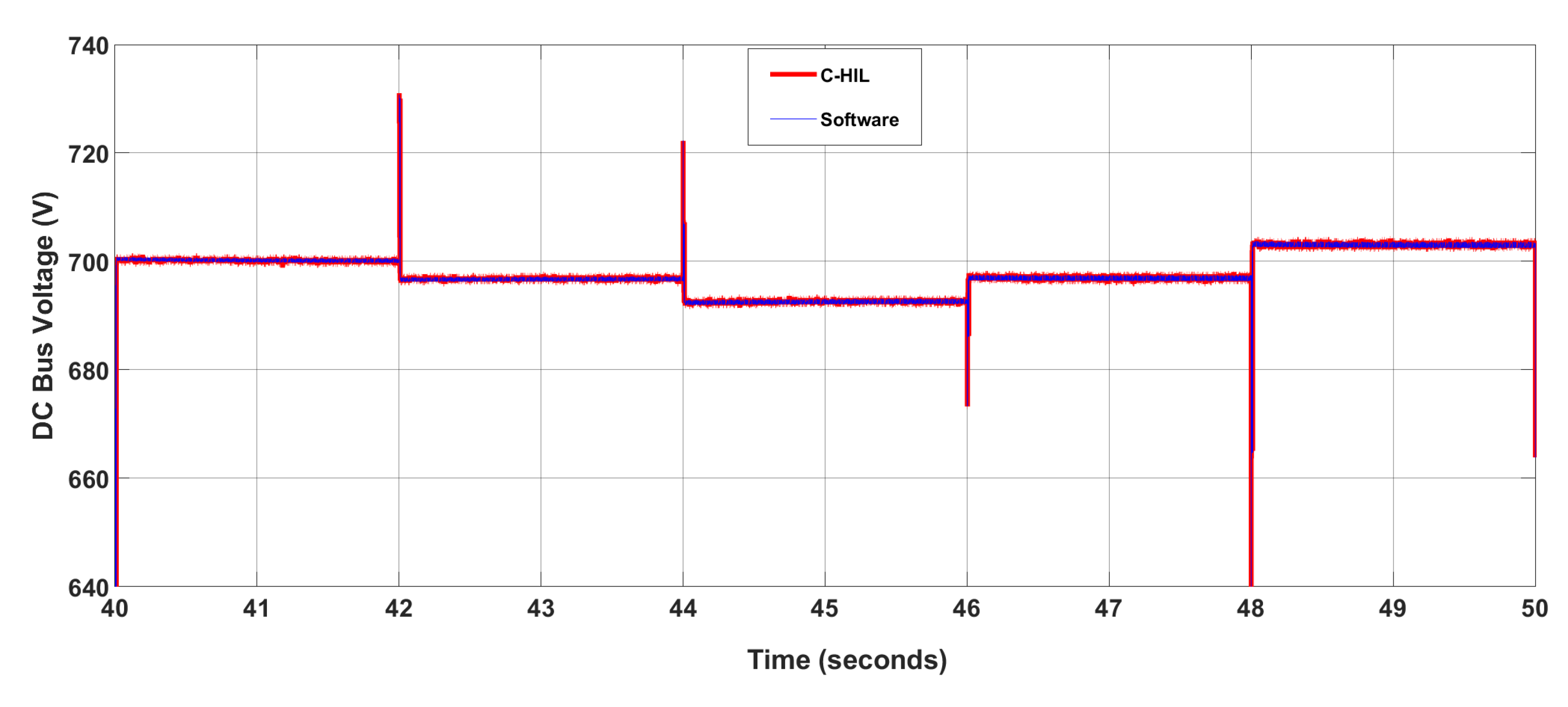
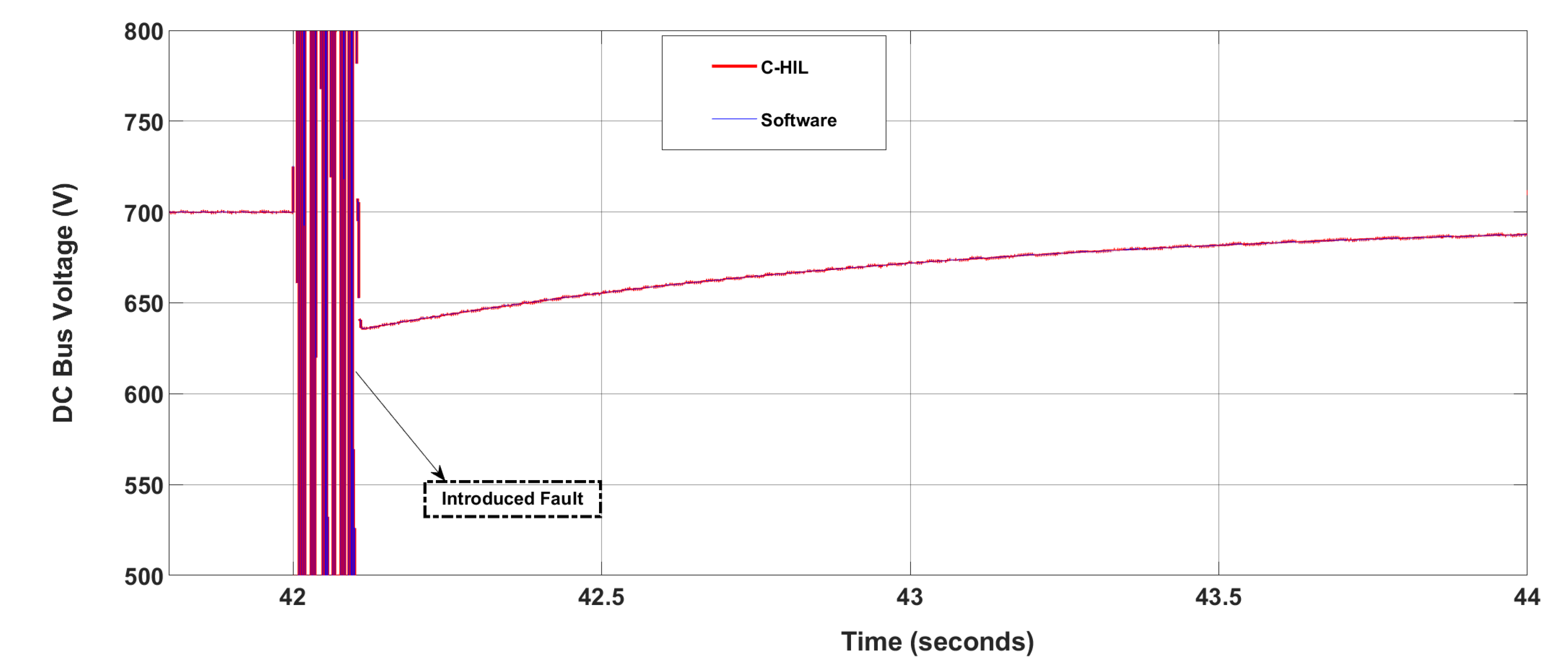
5. Experimental Validation (Hardware in the Loop)
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gejguš, M.; Aschbacher, C.; Sablik, J. Comparison of the Total Costs of Renewable and Conventional Energy Sources; Research Papers Faculty of Materials Science and Technology Slovak University of Technology: Trnava, Slovakia, 2016; Volume 24, pp. 99–104. [Google Scholar]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Desideri, U.; Yan, J. Clean Energy Technologies and Systems for a Sustainable World; Applied Energy: Perugia, Italy, 2012. [Google Scholar]
- Wu, T.; Ye, F.; Su, Y.; Wang, Y.; Riffat, S. Coordinated control strategy of dc microgrid with hybrid energy storage system to smooth power output fluctuation. Int. J. -Low-Carbon Technol. 2020, 15, 46–54. [Google Scholar] [CrossRef] [Green Version]
- Armghan, H.; Yang, M.; Armghan, A.; Ali, N. Double integral action based sliding mode controller design for the back-to-back converters in grid-connected hybrid wind-pv system. Int. J. Electr. Power Energy Syst. 2021, 127, 106655. [Google Scholar] [CrossRef]
- Armghan, H.; Yang, M.; Wang, M.; Ali, N.; Armghan, A. Nonlinear integral backstepping based control of a dc microgrid with renewable generation and energy storage systems. Int. J. Electr. Power Energy Syst. 2020, 117, 105613. [Google Scholar] [CrossRef]
- Aneke, M.; Wang, M. Energy storage technologies and real life applications—A state of the art review. Appl. Energy 2016, 179, 350–377. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Hou, J.; Hofmann, H.; Li, J.; Ouyang, M. Sliding-mode and lyapunov function-based control for battery/supercapacitor hybrid energy storage system used in electric vehicles. Energy 2017, 122, 601–612. [Google Scholar] [CrossRef]
- Bai, Z.; Yan, Z.; Wu, X.; Xu, J.; Cao, B. H control for battery/supercapacitor hybrid energy storage system used in electric vehicles. Int. J. Automot. Technol. 2019, 20, 1287–1296. [Google Scholar] [CrossRef]
- Alanazi, A.; Lotfi, H.; Khodaei, A. Coordinated ac/dc microgrid optimal scheduling. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar]
- Jia, H.; Mu, Y.; Qi, Y. A statistical model to determine the capacity of battery–supercapacitor hybrid energy storage system in autonomous microgrid. Int. J. Electr. Power Energy Syst. 2014, 54, 516–524. [Google Scholar] [CrossRef]
- Zhang, L.; Xiao, Y.; Zhu, Y. Voltage Segment Control of Wind/PV Hybrid Islanded DC Microgrid with Multiple Energy Storages; IET: Shanghai, China, 2019. [Google Scholar]
- Armghan, H.; Yang, M.; Armghan, A.; Ali, N.; Wang, M.; Ahmad, I. Design of integral terminal sliding mode controller for the hybrid ac/dc microgrids involving renewables and energy storage systems. Int. J. Electr. Power Energy Syst. 2020, 119, 105857. [Google Scholar] [CrossRef]
- Mahdavi, M.S.; Gharehpetian, G.; Ranjbaran, P.; Azizi, H. Frequencycregulation of AUT microgrid using modified fuzzy pi controller for flywheel energy storage system. In Proceedings of the 2018 9th Annual Power Electronics, Drives Systems and Technologies Conference (PEDSTC), Tehran, Iran, 13–15 February 2018; pp. 426–431. [Google Scholar]
- Villalón, A.; Rivera, M.; Salgueiro, Y.; Muñoz, J.; Dragičević, T.; Blaabjerg, F. Predictive control for microgrid applications: A review study. Energies 2020, 13, 2454. [Google Scholar] [CrossRef]
- Mehdi, H.; Salmasi, F.R. Robust optimal power management system for a hybrid AC/DC micro-grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar]
- Teimour, H.; Kebriaei, H.; Salmasi, F.R. Decentralised robust TS fuzzy controller for a parallel islanded AC microgrid. IET Gener. Transm. Distrib. 2019, 13, 1589–1598. [Google Scholar]
- Wu, X.; Xu, Y.; He, J.; Wang, X.; Vasquez, J.C.; Guerrero, J.M. Pinning-based hierarchical and distributed cooperative control for ac microgrid clusters. IEEE Trans. Power Electron. 2019, 35, 9867–9887. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S.; Guler, N. Indirect sliding mode control for dc–dc sepic converters. IEEE Trans. Ind. Inform. 2019, 16, 4099–4108. [Google Scholar] [CrossRef]
- Ravada, B.R.; Tummuru, N.R.; Ande, B.N.L. Photovoltaic-wind and hybrid energy storage integrated multi-source converter configuration for dc microgrid applications. IEEE Trans. Sustain. Energy 2020, 12, 83–91. [Google Scholar] [CrossRef]
- Yin, C.; Wu, H.; Locment, F.; Sechilariu, M. Energy management of dc microgrid based on photovoltaic combined with diesel generator and supercapacitor. Energy Convers. Manag. 2017, 132, 14–27. [Google Scholar] [CrossRef]
- Murdianto, F.D.; Nansur, A.R.; Hermawan, A.S.L.; Purwanto, E.; Jaya, A.; Rifadil, M.M. Modeling and simulation of mppt sepic-buck converter series using flower pollination algorithm (fpa)-pi controller in dc microgrid isolated system. In Proceedings of the 2018 International Electrical Engineering Congress (iEECON), Krabi, Thailand, 7–9 March 2018; pp. 1–4. [Google Scholar]
- Suresh, V.; Pachauri, N.; Vigneysh, T. Decentralized control strategy for fuel cell/pv/bess based microgrid using modified fractional order pi controller. Int. J. Hydrogen Energy 2021, 46, 4417–4436. [Google Scholar] [CrossRef]
- Zaheeruddin; Singh, K. Intelligent fractional-order-based centralized frequency controller for microgrid. IETE J. Res. 2020, 66, 1–15. [Google Scholar] [CrossRef]
- Sedhom, B.E.; El-Saadawi, M.M.; Elhosseini, M.A.; Saeed, M.A.; Abd-Raboh, E.E. A harmony search-based h-infinity control method for islanded microgrid. ISA Trans. 2020, 99, 252–269. [Google Scholar] [CrossRef] [PubMed]
- Sedhom, B.E.; El-Saadawi, M.M.; Hatata, A.Y.; Abd-Raboh, E.E. A multistage h-infinity–based controller for adjusting voltage and frequency and improving power quality in islanded microgrids. Int. Trans. Electr. Energy Syst. 2020, 30, e12143. [Google Scholar] [CrossRef]
- Matayoshi, H.; Kinjo, M.; Rangarajan, S.S.; Ramanathan, G.G.; Hemeida, A.M.; Senjyu, T. Islanding operation scheme for dc microgrid utilizing pseudo droop control of photovoltaic system. Energy Sustain. Dev. 2020, 55, 95–104. [Google Scholar] [CrossRef]
- Wang, S.; Lu, L.; Han, X.; Ouyang, M.; Feng, X. Virtual-battery based droop control and energy storage system size optimization of a dc microgrid for electric vehicle fast charging station. Appl. Energy 2020, 259, 114146. [Google Scholar] [CrossRef]
- Azeem, M.K.; Armghan, H.; Ahmad, I.; Hassan, M. Multistage adaptive nonlinear control of battery-ultracapacitor based plugin hybrid electric vehicles. J. Energy Storage 2020, 32, 101813. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Double integral sliding mode MPPT control of a photovoltaic system. IEEE Trans. Control Syst. Technol. 2015, 24, 285–292. [Google Scholar] [CrossRef]
- Chen, Z.X.; Wang, J.; Ge, L.S.; Jiang, T.; Liu, Y.F.; Liu, Y.F. Double integral sliding mode control of paralleled dc/dc converters. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015. [Google Scholar]
- Li, P.; Guo, T.; Zhou, F.; Yang, J.; Liu, Y. Nonlinear coordinated control of parallel bidirectional power converters in an ac/dc hybrid microgrid. Int. J. Electr. Power Energy Syst. 2020, 122, 106208. [Google Scholar] [CrossRef]
- Yousefizadeh, S.; Bendtsen, J.D.; Vafamand, N.; Khooban, M.H.; Blaab-jerg, F.; Dragicevic, T. Tracking control for a dc microgrid feeding uncertain loads in more electric aircraft: Adaptive backstepping approach. IEEE Trans. Ind. Electron. 2018, 66, 5644–5652. [Google Scholar] [CrossRef] [Green Version]
- Davari, M.; Aghababa, M.P.; Blaabjerg, F.; Saif, M. A modular adaptive robust nonlinear control for resilient integration of vsis into emerging modernized microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 2907–2925. [Google Scholar] [CrossRef]
- Ahmadi, H.; Kazemi, A. The lyapunov-based stability analysis of reduced order micro-grid via uncertain lmi condition. Int. J. Electr. Power Energy Syst. 2020, 117, 105585. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, M.; Chen, Y.; Chen, X.; Wen, J.; He, H. A novel secondary optimal control for multiple battery energy storages in a dc microgrid. IEEE Trans. Smart Grid 2020, 11, 3716–3725. [Google Scholar] [CrossRef]
- Tani, A.; Camara, M.B.; Dakyo, B. Energy management in the decentralized generation systems based on renewable energy—Ultracapacitors and battery to compensate the wind/load power fluctuations. IEEE Trans. Ind. Appl. 2014, 51, 1817–1827. [Google Scholar] [CrossRef]
- Babazadeh, M.; Karimi, H. A robust two-degree-of-freedom control strategy for an islanded microgrid. IEEE Trans. Power Deliv. 2013, 28, 1339–1347. [Google Scholar] [CrossRef]
- Iftikhar, R.; Ahmad, I.; Arsalan, M.; Naz, N.; Ali, N.; Armghan, H. Mppt for photovoltaic system using nonlinear controller. Int. J. Photo Energy 2018, 2018, 6979723. [Google Scholar] [CrossRef] [Green Version]
- Rahman, A.U.; Ahmad, I.; Malik, A.S. Variable structure-based control of fuel cell-supercapacitor-battery based hybrid electric vehicle. J. Energy Storage 2020, 29, 101365. [Google Scholar] [CrossRef]
- Zhang, Q.Q.; Wai, R.J. Robust Power Sharing and Voltage Stabilization Control Structure via Sliding-Mode Technique in Islanded Micro-Grid. Energies 2021, 14, 883. [Google Scholar] [CrossRef]
- Han, Y.; Ma, R.; Cui, J. Adaptive higher-order sliding mode control for islanding and grid-connected operation of a microgrid. Energies 2018, 11, 1459. [Google Scholar] [CrossRef] [Green Version]
- Mehdi, H.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar]
- Tummuru, N.R.; Mishra, M.K.; Srinivas, S. Dynamic energy management of renewable grid integrated hybrid energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 7728–7737. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Unit Specifications | |
|---|---|
| Open loop voltage | 166 V |
| Close loop voltage | 17.5 V |
| Maximum power point voltage () | 300 V |
| Maximum power point current () | 15.2 A |
| Nominal power ouptput capacity | 1500 W |
| Battery Parameters | |
|---|---|
| Battery type | Lithium-Ion (Li-Ion) |
| Terminal voltage | 190–230 V |
| Rated current capacity | 13.9 Ah |
| Capacity per cell | 1.4 Ah |
| Battery array | parallel: 25, series: 64 |
| Supercapacitor Parameters | |
| Nominal voltage | 205 V |
| Total capacitance | 2700 F |
| Initial SoC | 1 |
| Current threshold | −80–80 A |
| Supercapacitor array | parallel: 20, series: 20 |
| Circuit Parameters | |
|---|---|
| Inductances , , | 495 H, 1 mH, 1 mH |
| Capacitances , | 95 nF, 70 mF |
| Resistances ,, | 0.5 m, 10 m, 10 m |
| Switching frequency | 100 KHz |
| Controller Parameters | |
| , , , | 9000, 900, 1000, 7700 |
| , , , , , | 0.1, 0.1, 0.1, 0.2, 0.2, |
| , , | 0.3, 0.3, 0.5 |
| , , , | 0.96, 0.97, 0.98, 0.94 |
| , , , | 0.03, 0.03, 0.02, 0.06 |
| Parameters of the Genetic Algorithm | |
|---|---|
| Size of population | 100 |
| Maximum generations | 50 |
| Crossover probability | 0.8 |
| Mutation probability | 0.02 |
| Controller/ Performance | Rise Time | Settling Time | Percentage Overshoot | Steady State Error |
|---|---|---|---|---|
| Indices | (s) | (s) | (%) | (SSE) (%) |
| Lyapunov Redesign | 0.0026 | 0.1 | 11.4 | 0.02 |
| SMC | 0.04 | 0.0002 | 9.9 | 0.007 |
| DISMC | 0.0015 | 0.00007 | Nil | 0.0003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Armghan, A.; Azeem, M.K.; Armghan, H.; Yang, M.; Alenezi, F.; Hassan, M. Dynamical Operation Based Robust Nonlinear Control of DC Microgrid Considering Renewable Energy Integration. Energies 2021, 14, 3988. https://0-doi-org.brum.beds.ac.uk/10.3390/en14133988
Armghan A, Azeem MK, Armghan H, Yang M, Alenezi F, Hassan M. Dynamical Operation Based Robust Nonlinear Control of DC Microgrid Considering Renewable Energy Integration. Energies. 2021; 14(13):3988. https://0-doi-org.brum.beds.ac.uk/10.3390/en14133988
Chicago/Turabian StyleArmghan, Ammar, Muhammad Kashif Azeem, Hammad Armghan, Ming Yang, Fayadh Alenezi, and Mudasser Hassan. 2021. "Dynamical Operation Based Robust Nonlinear Control of DC Microgrid Considering Renewable Energy Integration" Energies 14, no. 13: 3988. https://0-doi-org.brum.beds.ac.uk/10.3390/en14133988