
Model-Based Control System Design of Brushless Doubly Fed Reluctance Machines Using an Unscented Kalman Filter

 ,
,  ,
, 
 and
and
Abstract
:1. Introduction
1.1. Literature Review
1.2. Paper Subject and Outline
2. The Dynamic Model of the BDFRM
3. Control System Design
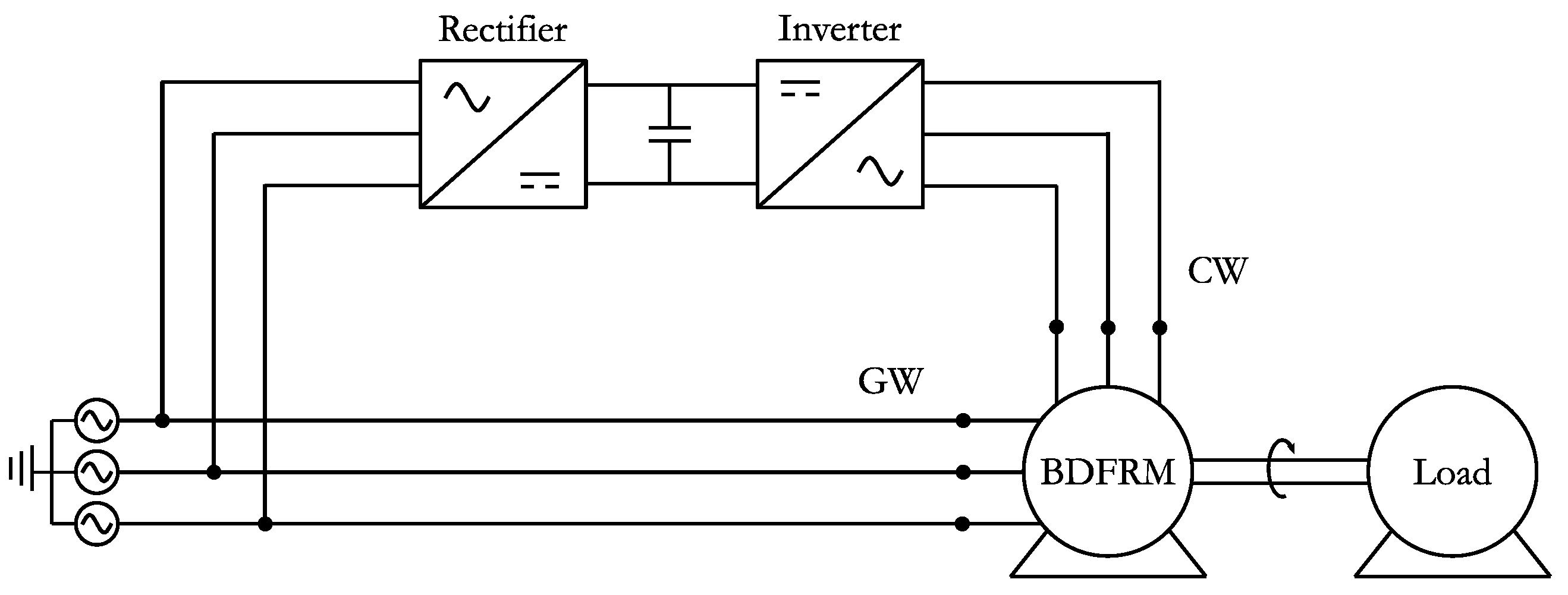
3.1. System Description and Control Requirements
3.2. Cascade Control
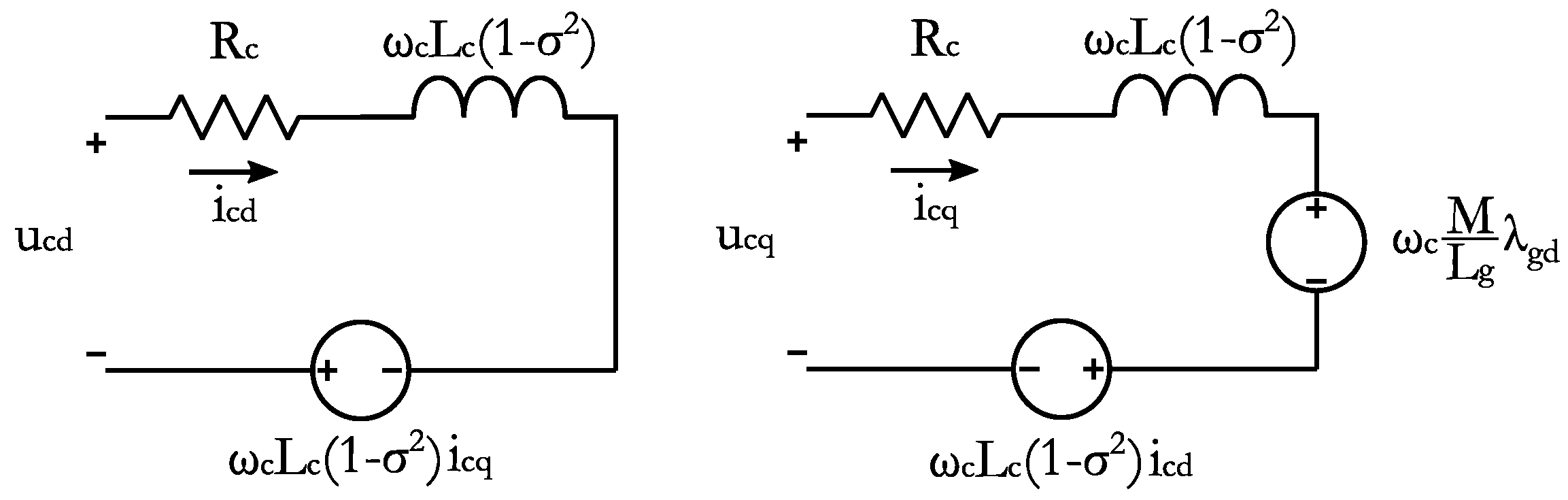
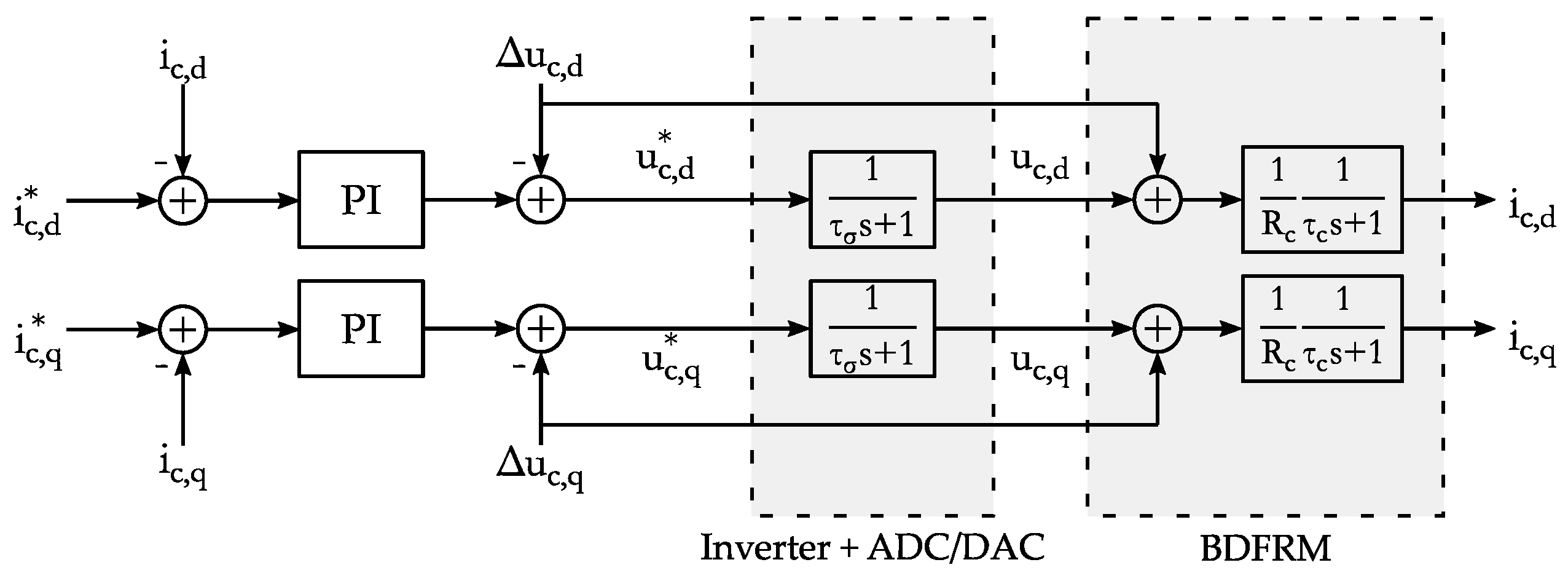
3.2.1. Control Winding Current Control
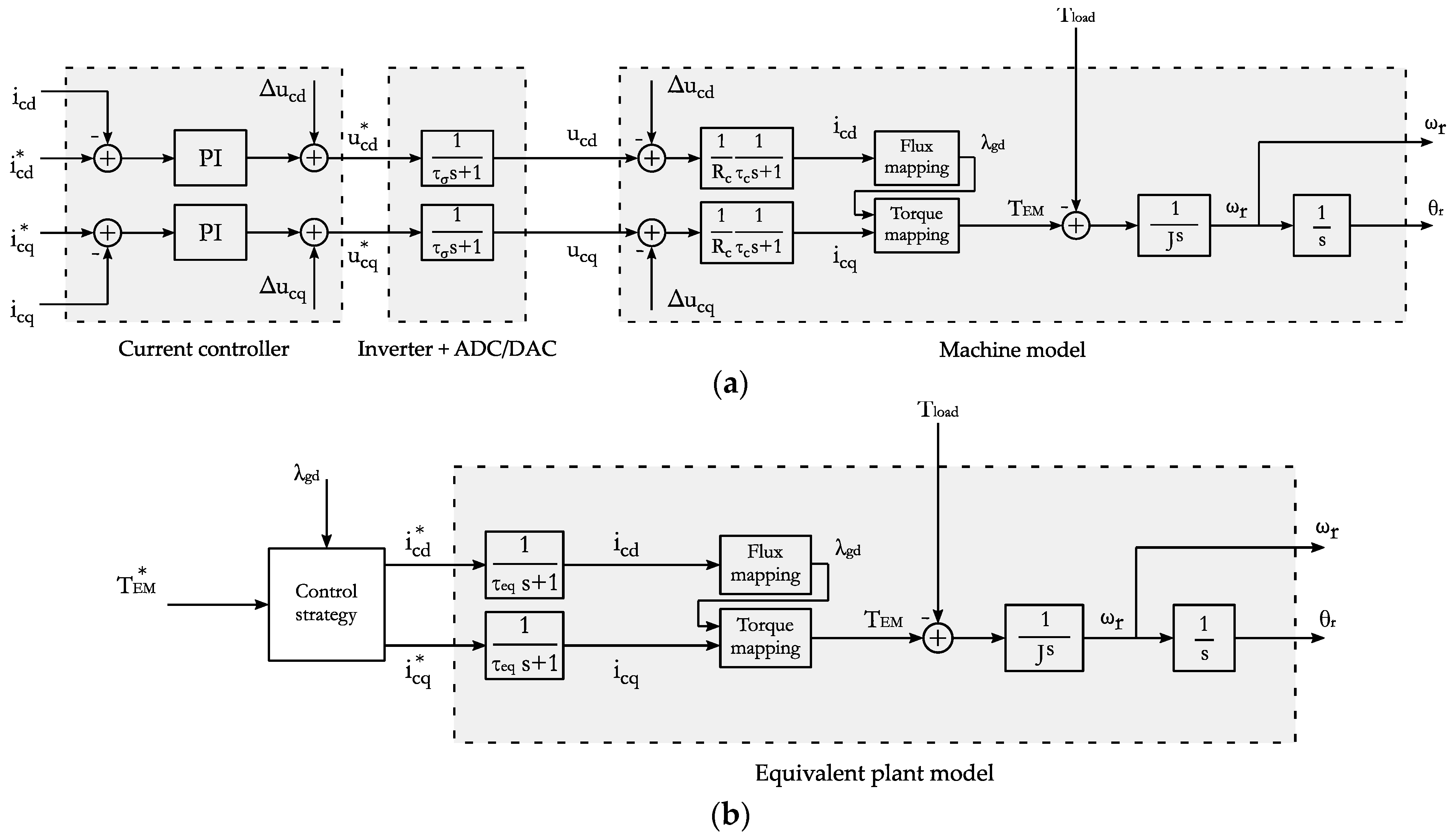
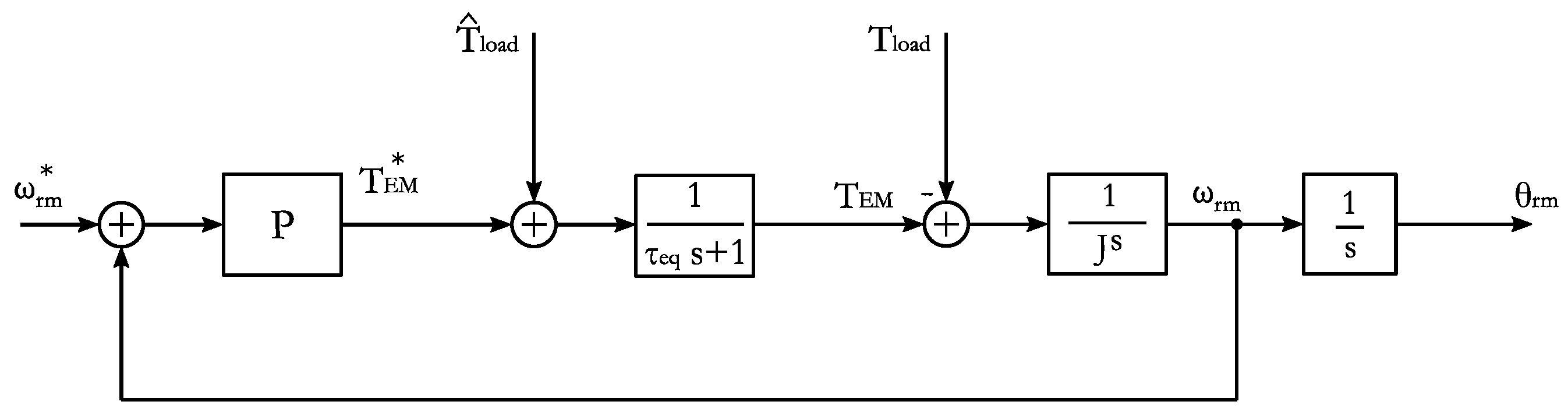
3.2.2. Speed Control
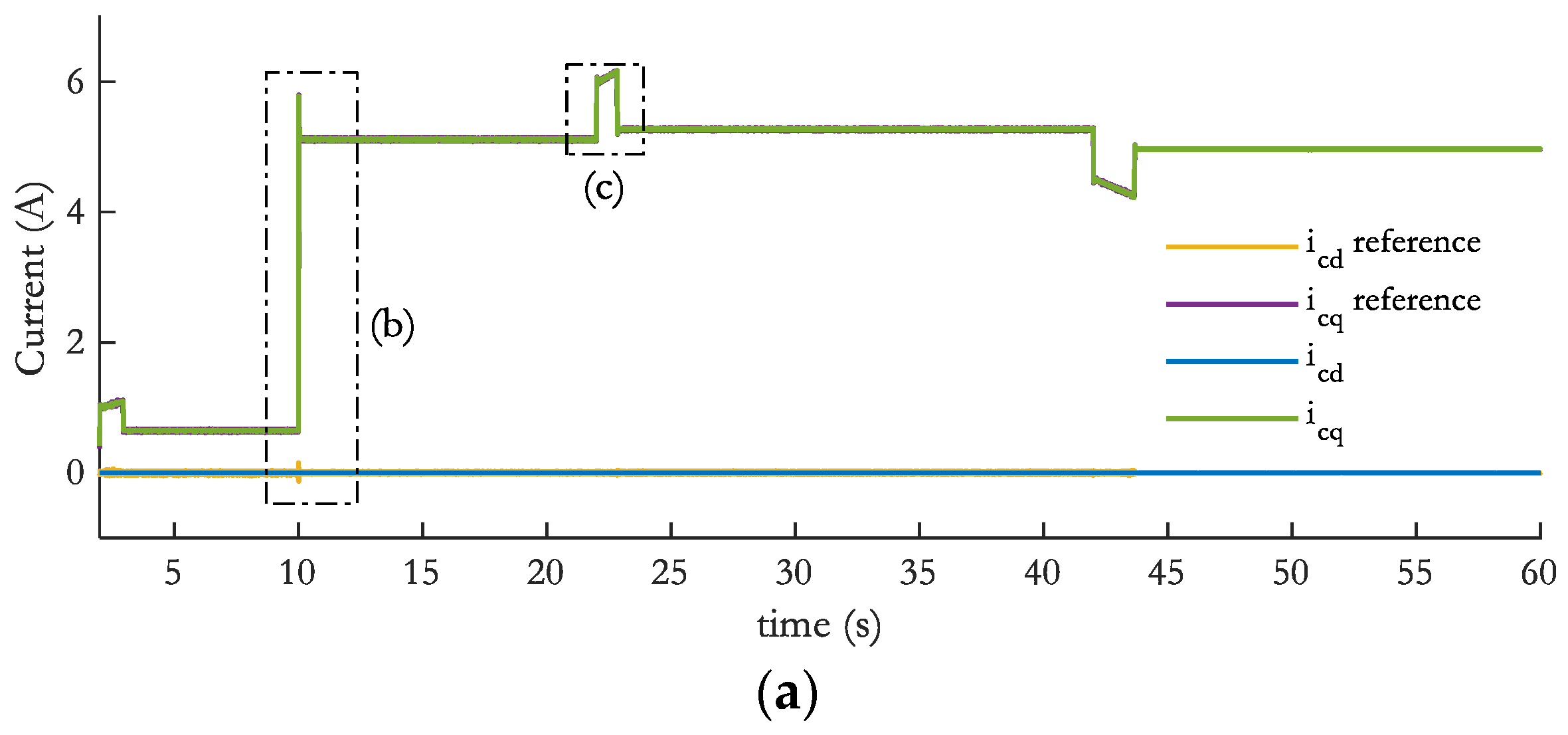
3.2.3. Simulation Results
4. Kalman Filtering
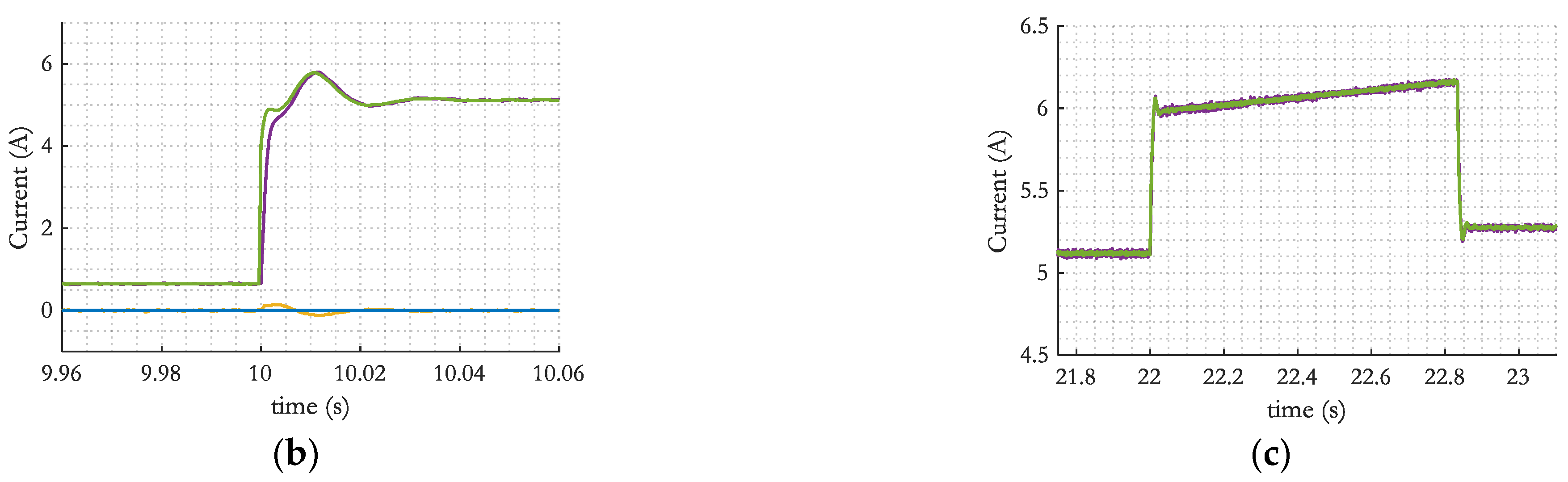
4.1. The Unscented Kalman Filter
4.2. Model Description
4.3. Simulation Results
5. Experimental Results
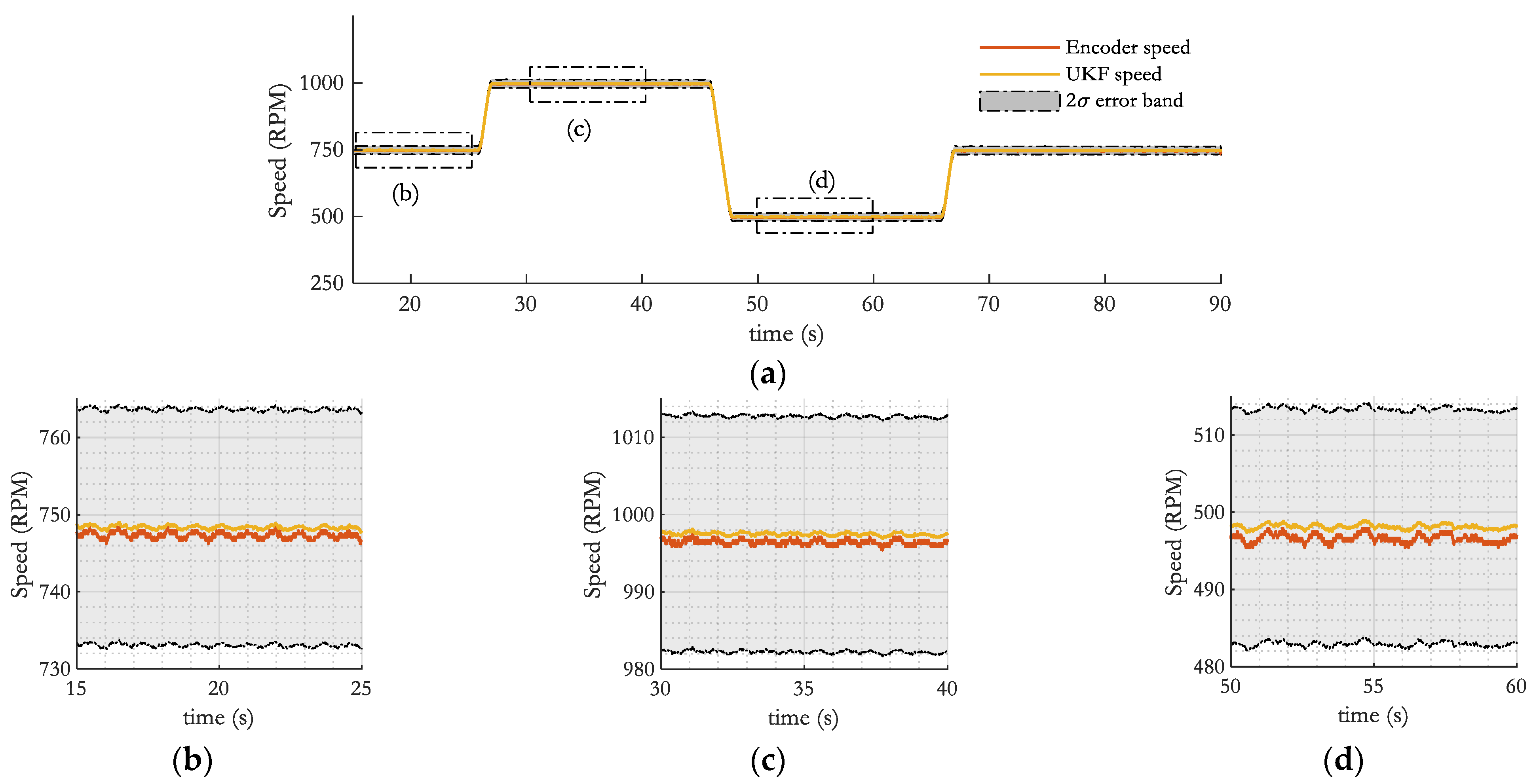
5.1. UKF Speed Filtering
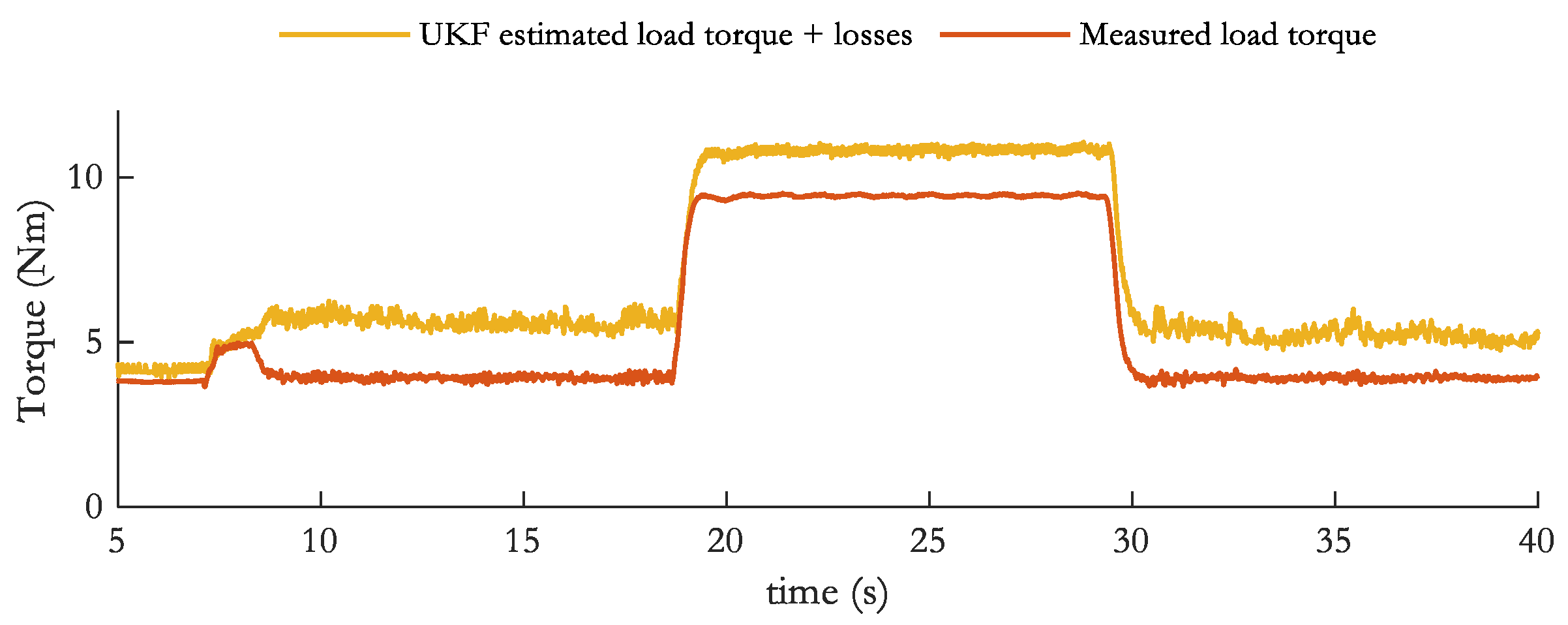
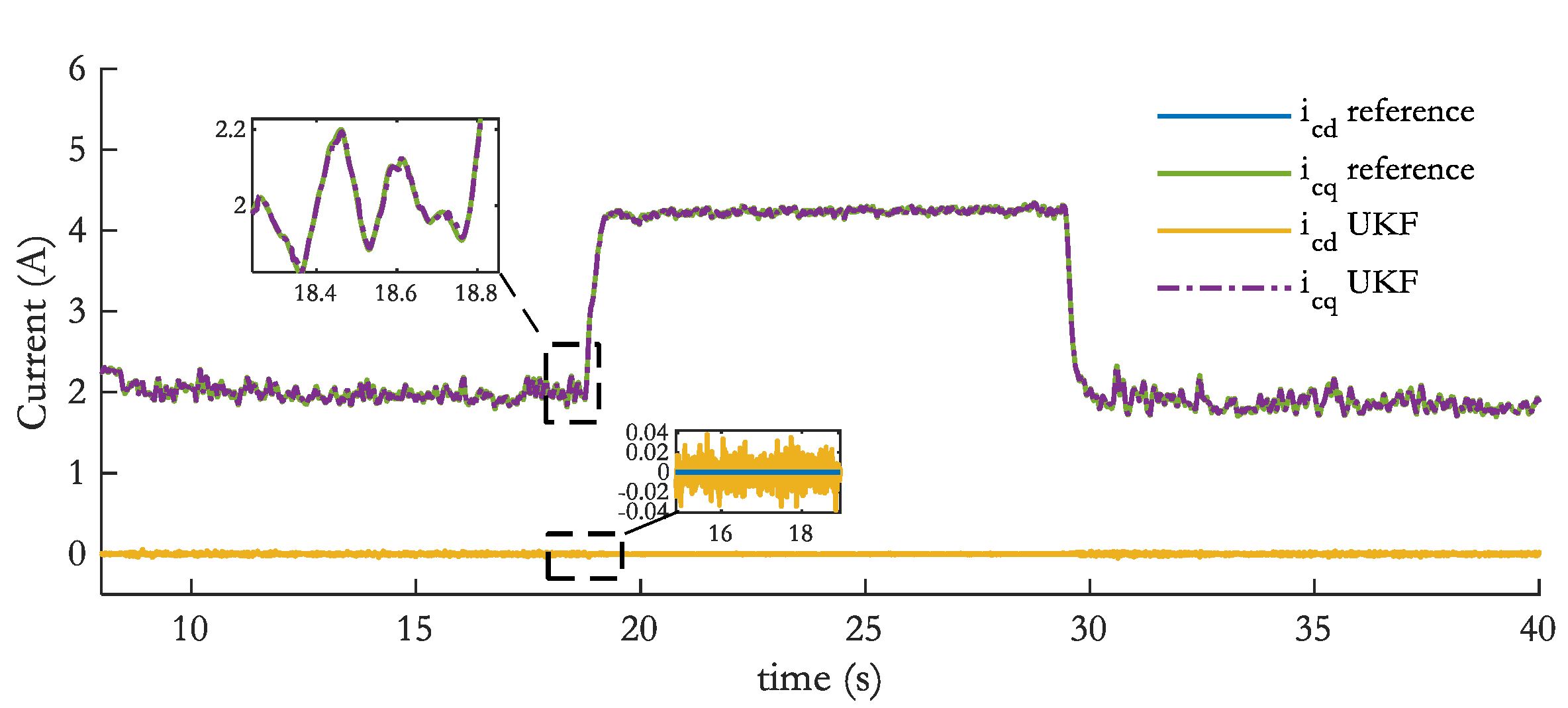
5.2. Load Rejection
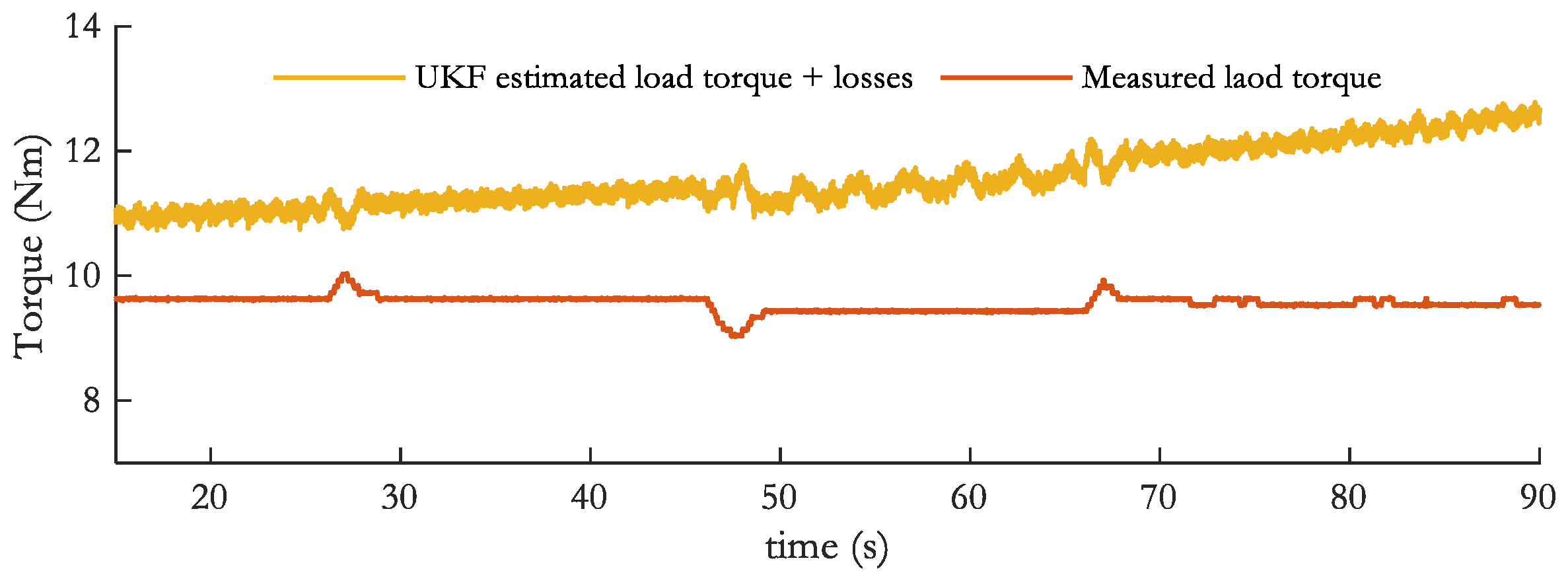
5.3. Variable Speed Operation
5.4. Tuning of the UKF
5.5. Encoderless Speed Estimation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Broadway, A.R.W. Cageless induction machine. Proc. Inst. Electr. Eng. 1971, 118, 1593. [Google Scholar] [CrossRef]
- Wang, X.; McMahon, R.A.; Tavner, P.J. Design of the Brushless Doubly-Fed (Induction) Machine. In Proceedings of the IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007. [Google Scholar]
- Han, P.; Cheng, M.; Ademi, S.; Jovanovic, M.G. Brushless doubly-fed machines: Opportunities and challenges. Chin. J. Electr. Eng. 2018, 4, 1–17. [Google Scholar] [CrossRef]
- Benômar, Y.; Croonen, J.; Verrelst, B.; Mierlo, J.V.; Hegazy, O. On Analytical Modeling of the Air Gap Field Modulation in the Brushless Doubly Fed Reluctance Machine. Energies 2021, 14, 2388. [Google Scholar] [CrossRef]
- Han, P.; Zhang, J.; Cheng, M. Theoretical and Experimental Investigation of the Brushless Doubly-Fed Machine with a Multi-Barrier Rotor. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018. [Google Scholar]
- Liang, F.; Xu, L.; Lipo, T.A. d-q analysis of a variable speed doubly ac excited reluctance motor. Electr. Mach. Power Syst. 1991, 19, 125–138. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, F.; Xu, L. Parameter and performance comparison of doubly fed brushless machine with cage and reluctance rotors. IEEE Trans. Ind. Appl. 2002, 38, 1237–1243. [Google Scholar] [CrossRef]
- Jovanovic, M.G.; Betz, R.E.; Yu, J. The use of doubly fed reluctance machines for large pumps and wind turbines. IEEE Trans. Ind. Appl. 2002, 38, 1508–1516. [Google Scholar] [CrossRef]
- Jovanovic, M.; Betz, R. Power factor control using brushless doubly fed reluctance machines. In Proceedings of the Conference Record of the 2000 IEEE Industry Applications Conference, Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No. 00CH37129), Rome, Italy, 8–12 October 2000; pp. 523–530. [Google Scholar]
- Xu, L.; Wang, F. Comparative study of magnetic coupling for a doubly fed brushless machine with reluctance and cage rotors. In Proceedings of the IAS’97. Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual Meeting, New Orleans, LA, USA, 5–9 October 1997; pp. 326–332. [Google Scholar]
- Xu, L.; Zhen, L.; Kim, E.-H. Field orientation control of a doubly excited brushless reluctance machine. In Proceedings of IAS’96. Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; pp. 319–325. [Google Scholar]
- Dorrell, D.G.; Jovanovic, M. On the Possibilities of Using a Brushless Doubly-Fed Reluctance Generator in a 2 MW Wind Turbine. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–8. [Google Scholar]
- Protsenko, K.; Xu, D. Modeling and Control of Brushless Doubly-Fed Induction Generators in Wind Energy Applications. In Proceedings of the APEC 07—Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 25 Febuary–1 March 2007; pp. 529–535. [Google Scholar]
- Gorti, B.; Zhou, D.; Spée, R.; Alexander, G.; Wallace, A. Development of a brushless doubly-fed machine for a limited-speed pump drive in a waste-water treatment plant. In Proceedings of the 1994 IEEE Industry Applications Society Annual Meeting, Denver, CO, USA, 2–6 October 1994; pp. 523–529. [Google Scholar]
- Xu, L.; Tang, Y. A novel wind-power generating system using field orientation controlled doubly-excited brushless reluctance machine. In Proceedings of the Conference Record of the 1992 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 4 October 1992; pp. 408–413. [Google Scholar]
- Agrawal, S.; Province, A.; Banerjee, A. An Approach to Maximize Torque Density in a Brushless Doubly Fed Reluctance Machine. IEEE Trans. Ind. Appl. 2020, 56, 4829–4838. [Google Scholar] [CrossRef]
- Jovanovic, M.G.; Betz, R.E.; Yu, J.; Levi, E. Aspects of vector and scalar control of brushless doubly fed reluctance machines. In Proceedings of the 4th IEEE International Conference on Power Electronics and Drive Systems, IEEE PEDS 2001-Indonesia. Proceedings (Cat. No. 01TH8594), Denpasar, Indonesia, 25 October 2001; pp. 461–467. [Google Scholar]
- Hassan, M.; Jovanovic, M. Improved scalar control using flexible DC-Link voltage in brushless doubly-fed reluctance machines for wind applications. In Proceedings of the 2012 2nd International Symposium on Environment Friendly Energies and Applications, Newcastle upon Tyne, UK, 25–27 June 2012; pp. 482–487. [Google Scholar]
- Taluo, T.; Ristić, L.; Jovanović, M. Performance Analysis of Brushless Doubly Fed Reluctance Machines. In Proceedings of the 2019 20th International Symposium on Power Electronics (Ee), Novi Sad, Serbia, 23–26 October 2019; pp. 1–6. [Google Scholar]
- Ademi, S.; Jovanović, M.G. Vector Control Methods for Brushless Doubly Fed Reluctance Machines. IEEE Trans. Ind. Electron. 2015, 62, 96–104. [Google Scholar] [CrossRef]
- Jovanovic, M.; Yu, J.; Levi, E. Direct Torque Control of Brushless Doubly Fed Reluctance Machines. Electr. Power Compon. Syst. 2004, 32, 941–958. [Google Scholar] [CrossRef]
- Jovanovic, M. Control of brushless doubly-fed reluctance motors. In Proceedings of the IEEE International Symposium on Industrial Electronics, 2005. ISIE 2005, Dubrovnik, Croatia, 20–23 June 2005; pp. 1667–1672. [Google Scholar]
- Jovanovic, M.; Yu, J.; Levi, E. A doubly-fed reluctance motor drive with sensorless direct torque control. In Proceedings of the IEEE International Electric Machines and Drives Conference, 2003. IEMDC’03, Madison, WI, USA, 1–4 June 2003; pp. 1518–1524. [Google Scholar]
- Kiran, K.; Das, S.; Singh, D. Model predictive field oriented speed control of brushless doubly-fed reluctance motor drive. In Proceedings of the 2018 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 18–20 January 2018; pp. 1–6. [Google Scholar]
- Kiran, K.; Das, S. Variable speed operation of brushless doubly fed reluctance machine drive using model predictive current control technique. IEEE Trans. Power Electron. 2020, 35, 8396–8404. [Google Scholar] [CrossRef]
- Jovanovic, M.G.; Dorrell, D.G. Sensorless control of brushless doubly-fed reluctance machines using an angular velocity observer. In Proceedings of the 2007 7th International Conference on Power Electronics and Drive Systems, Bangkok, Thailand, 27–30 November 2007; pp. 717–724. [Google Scholar]
- Ademi, S.; Jovanović, M.G.; Chaal, H.; Cao, W. A new sensorless speed control scheme for doubly fed reluctance generators. IEEE Trans. Energy Convers. 2016, 31, 993–1001. [Google Scholar] [CrossRef]
- Kiran, K.; Das, S. Implementation of reactive power-based MRAS for sensorless speed control of brushless doubly fed reluctance motor drive. IET Power Electron. 2017, 11, 192–201. [Google Scholar] [CrossRef]
- Kiran, K.; Das, S.; Kumar, M.; Sahu, A. Sensorless Speed Control of Brushless Doubly-Fed Reluctance Motor Drive using Secondary Flux based MRAS. Electr. Power Compon. Syst. 2018, 46, 701–715. [Google Scholar] [CrossRef]
- Kiran, K.; Das, S.; Sahu, A. Sensorless speed estimation and control of brushless doubly-fed reluctance machine drive using model reference adaptive system. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Thiruvananthapuram, India, 14–17 December 2016; pp. 1–6. [Google Scholar]
- Jovanovic, M. Sensored and sensorless speed control methods for brushless doubly fed reluctance motors. IET Electr. Power Appl. 2009, 3, 503–513. [Google Scholar] [CrossRef]
- Betz, R.E.; Jovanović, M.G. Introduction to the Space Vector Modeling of the Brushless Doubly Fed Reluctance Machine. Electr. Power Compon. Syst. 2003, 31, 729–755. [Google Scholar] [CrossRef]
- Quang, N.P.; Dittrich, J.-A. Vector Control of Three-Phase AC Machines; Springer: Berlin/Heidelberg, Germany, 2008; Volume 2, Available online: https://0-link-springer-com.brum.beds.ac.uk/book/10.1007/978-3-662-46915-6 (accessed on 6 December 2021).
- Takahashi, I.; Noguchi, T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Song, W.K.; Dorrell, D.G. Implementation of improved direct torque control method of brushless doubly-fed reluctance machines for wind turbine. In Proceedings of the 2014 IEEE International Conference on Industrial Technology (ICIT), Busan, Korea, 26 February–1 March 2014; pp. 509–513. [Google Scholar]
- Chaal, H.; Jovanovic, M. Improved Direct Torque Control Using Kalman Filter: Application to a Doubly-Fed Machine. 2009. Available online: https://www.semanticscholar.org/paper/Improved-direct-torque-control-using-Kalman-filter%3A-Chaal-Jovanovi%C4%87/e159a090d3dc9c627698a9e126c8ff93e9459dff#citing-papers (accessed on 29 November 2021).
- Kumar, M.; Das, S.; Kiran, K. Sensorless Speed Estimation of Brushless Doubly-Fed Reluctance Generator Using Active Power Based MRAS. IEEE Trans. Power Electron. 2019, 34, 7878–7886. [Google Scholar] [CrossRef]
- Betz, R.E.; Jovanovic, M. Introduction to Brushless Doubly Fed Reluctance Machines—The Basic Equations; Aalborg University: Aalborg, Denmark, 1998. [Google Scholar] [CrossRef]
- Betz, R.E.; Jovanovic, M.G. Brushless Doubly Fed Reluctance Machines—A Tutorial. 2003. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.565.8777&rep=rep1&type=pdf (accessed on 29 November 2021).
- Terorde, G. Electrical Drives and Control Techniques; ACCO: Leuven, Belgium, 2004. [Google Scholar]
- Umland, J.W.; Safiuddin, M. Magnitude and symmetric optimum criterion for the design of linear control systems: What is it and how does it compare with the others? IEEE Trans. Ind. Appl. 1990, 26, 489–497. [Google Scholar] [CrossRef]
- Papadopoulos, K.G. PID Controller Tuning Using the Magnitude Optimum Criterion; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Maybeck, P.S. Stochastic Models, Estimation, and Control; Academic Press: Cambridge, MA, USA, 1979. [Google Scholar]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: Chelmsfors, MA, USA, 2012. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Signal Processing, Sensor Fusion, and Target Recognition VI; International Society for Optics and Photonics: Bellingham, WA, USA, 1997; pp. 182–193. [Google Scholar]
- Alonge, F.; Cangemi, T.; D’Ippolito, F.; Fagiolini, A.; Sferlazza, A. Convergence analysis of extended Kalman filter for sensorless control of induction motor. IEEE Trans. Ind. Electron. 2014, 62, 2341–2352. [Google Scholar] [CrossRef]
- Yildiz, R.; Barut, M.; Demir, R. Extended Kalman filter based estimations for improving speed-sensored control performance of induction motors. IET Electr. Power Appl. 2020, 14, 2471–2479. [Google Scholar] [CrossRef]
- Niedermayr, P.; Alberti, L.; Bolognani, S.; Abl, R. Implementation and experimental validation of ultra-high speed PMSM sensor-less control by means of extended Kalman filter. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 1. [Google Scholar] [CrossRef]
- Shi, K.; Chan, T.; Wong, Y.; Ho, S.L. Speed estimation of an induction motor drive using an optimized extended Kalman filter. IEEE Trans. Ind. Electron. 2002, 49, 124–133. [Google Scholar] [CrossRef] [Green Version]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No. 00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Giannitrapani, A.; Ceccarelli, N.; Scortecci, F.; Garulli, A. Comparison of EKF and UKF for spacecraft localization via angle measurements. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 75–84. [Google Scholar] [CrossRef]
- He, H.; Qin, H.; Sun, X.; Shui, Y. Comparison Study on the Battery SoC Estimation with EKF and UKF Algorithms. Energies 2013, 6, 5088–5100. [Google Scholar] [CrossRef]
- Kurt-Yavuz, Z.; Yavuz, S. A comparison of EKF, UKF, FastSLAM2. 0, and UKF-based FastSLAM algorithms. In Proceedings of 2012 IEEE 16th International Conference on Intelligent Engineering Systems (INES), Lisabon, Portugal, 13–15 June 2012; pp. 37–43. [Google Scholar]
- Van Der Merwe, R.; Wan, E.A. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing, Proceedings (Cat. No. 01CH37221), Salt Lake City, UT, USA, 7–11 May 2001; pp. 3461–3464. [Google Scholar]
- Åkesson, B.M.; Jørgensen, J.B.; Poulsen, N.K.; Jørgensen, S.B. A generalized autocovariance least-squares method for Kalman filter tuning. J. Process Control 2008, 18, 769–779. [Google Scholar] [CrossRef]
- Loebis, D.; Sutton, R.; Chudley, J.; Naeem, W. Adaptive tuning of a Kalman filter via fuzzy logic for an intelligent AUV navigation system. Control Eng. Pract. 2004, 12, 1531–1539. [Google Scholar] [CrossRef]
- Åkesson, B.M.; Jørgensen, J.B.; Poulsen, N.K.; Jørgensen, S.B. A tool for kalman filter tuning. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2007; Volume 24, pp. 859–864. [Google Scholar]
- Li, H. A Brief Tutorial On Recursive Estimation: Examples From Intelligent Vehicle Applications (Part III). 2014. Available online: https://hal.archives-ouvertes.fr/hal-01020546v1 (accessed on 29 November 2021).
- Betz, R.E.; Jovanovic, M.G. Theoretical analysis of control properties for the brushless doubly fed reluctance machine. IEEE Trans. Energy Convers. 2002, 17, 332–339. [Google Scholar] [CrossRef]
- Ghahremani, E.; Kamwa, I. Dynamic State Estimation in Power System by Applying the Extended Kalman Filter With Unknown Inputs to Phasor Measurements. IEEE Trans. Power Syst. 2011, 26, 2556–2566. [Google Scholar] [CrossRef]
- Terejanu, G.A. Unscented Kalman Filter Tutorial; Univerity of Buffalo: Buffalo, NY, USA, 2011. [Google Scholar]
- Dash, P.K.; Jena, R.; Panda, G.; Routray, A. An extended complex Kalman filter for frequency measurement of distorted signals. IEEE Trans. Instrum. Meas. 2000, 49, 746–753. [Google Scholar] [CrossRef] [Green Version]
- Dash, P.; Pradhan, A.; Panda, G. Frequency estimation of distorted power system signals using extended complex Kalman filter. IEEE Trans. Power Deliv. 1999, 14, 761–766. [Google Scholar] [CrossRef] [Green Version]
- Nanda, S.; Dash, P.K. A Gauss–Newton ADALINE for dynamic phasor estimation of power signals and its FPGA implementation. IEEE Trans. Instrum. Meas. 2016, 67, 45–56. [Google Scholar] [CrossRef]
- Halbwachs, D.; Wira, P.; Mercklé, J. Adaline-based approaches for time-varying frequency estimation in power systems. IFAC Proc. Vol. 2009, 42, 31–36. [Google Scholar] [CrossRef]
- Dash, P.; Swain, D.; Routray, A.; Liew, A. An adaptive neural network approach for the estimation of power system frequency. Electr. Power Syst. Res. 1997, 41, 203–210. [Google Scholar] [CrossRef]
- Schneider, R.; Georgakis, C. How To NOT Make the Extended Kalman Filter Fail. Ind. Eng. Chem. Res. 2013, 52, 3354–3362. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| pr/pg/pc | 6/2/4 | Ig (Arms) | 5.0 |
| Lg (mH) | 73.2 | Ic (Arms) | 2.5 |
| Lc (mH) | 156.3 | T (Nm) | 9.5 |
| M (mH) | 62.6 | J (kg m2) | 0.034 |
| Rg () | 10.0 | B (Nm s/rad) | 0.008 |
| Rc () | 15.0 | 145.8 | |
| Ugn (Vrms) | 120 | Kn,current | 171.4 |
| Udc (Vdc) | 540 | Kn,speed | 13.4 |
| fswitch (kHz) | 5 |
| Parameter | Value |
|---|---|
| 145.8 | |
| Kn current | 171.4 |
| Kn speed | 0.48 |
| Q | |
| R |
| Parameter | Value |
|---|---|
| 128.7 | |
| Kn,current | 171.4 |
| Kn,speed | 0.15 |
| Q | |
| R |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benômar, Y.; Croonen, J.; Verrelst, B.; Van Mierlo, J.; Hegazy, O. Model-Based Control System Design of Brushless Doubly Fed Reluctance Machines Using an Unscented Kalman Filter. Energies 2021, 14, 8222. https://0-doi-org.brum.beds.ac.uk/10.3390/en14248222
Benômar Y, Croonen J, Verrelst B, Van Mierlo J, Hegazy O. Model-Based Control System Design of Brushless Doubly Fed Reluctance Machines Using an Unscented Kalman Filter. Energies. 2021; 14(24):8222. https://0-doi-org.brum.beds.ac.uk/10.3390/en14248222
Chicago/Turabian StyleBenômar, Yassine, Julien Croonen, Björn Verrelst, Joeri Van Mierlo, and Omar Hegazy. 2021. "Model-Based Control System Design of Brushless Doubly Fed Reluctance Machines Using an Unscented Kalman Filter" Energies 14, no. 24: 8222. https://0-doi-org.brum.beds.ac.uk/10.3390/en14248222