
Improving the Maximum Power Extraction from Wind Turbines Using a Second-Generation CRONE Controller

 ,
,  ,
, 
 , ,
, , 
Abstract
:1. Introduction
2. Mathematical Model of the Wind Energy Conversion System
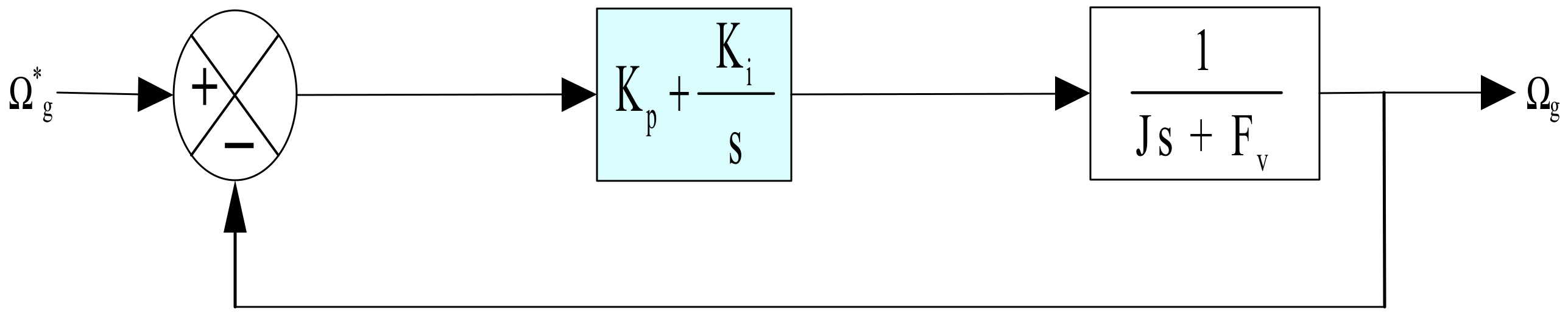
3. MPPT Strategy with Speed Control
3.1. CRONE Controller
- ▪
- The first generation of CRONE is used in cases where only the gain variations of the studied nominal model are to be controlled.
- ▪
- The second CRONE control strategy is used when there are both variations for the gain and the transitional frequencies of the controlled model.
- ▪
3.1.1. The First-Generation CRONE Method
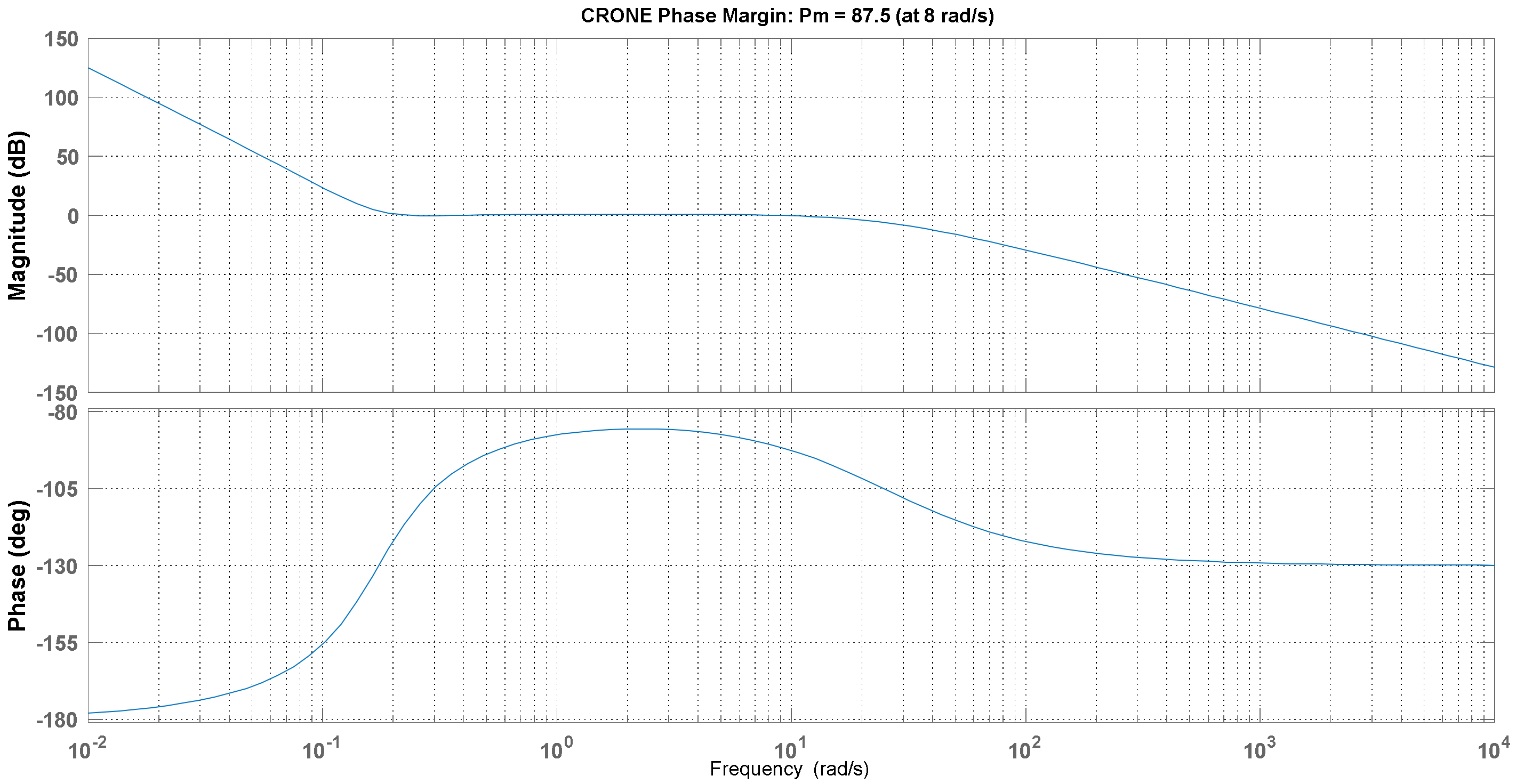
3.1.2. The Second-Generation CRONE Method
- A constant phase margin,
- A resonant peak Mr,
- A modulus margin, which is the minimal distance between the critical point and the open-loop Nyquist locus,
- The damping ratio of the closed-loop system.
3.1.3. The Third Generation CRONE Method
- “a” is the real order which determines the Nichols locus phase placement is called the generalized template.
- “b” is the imaginary order which determines the Nichols locus angle with respect to the vertical.
3.1.4. CRONE Method Design for Wind Turbine MPPT
3.2. PI Controller
3.3. Nonlinear Backstepping (BS) Controller
3.4. Sliding Mode Controller (SMC)
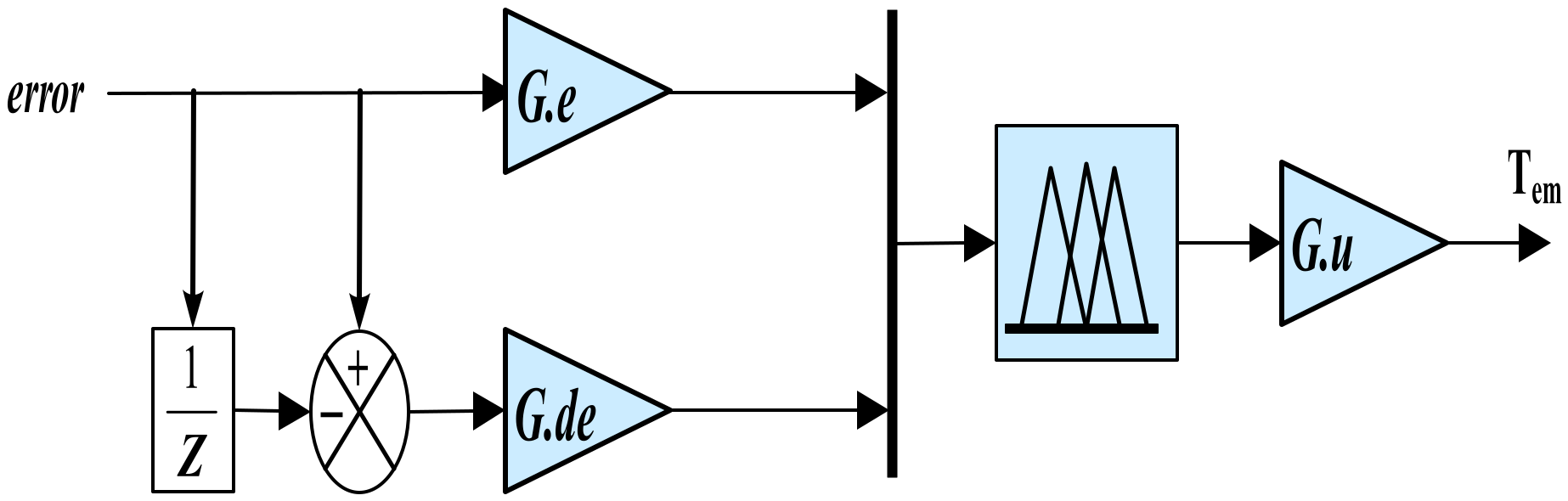
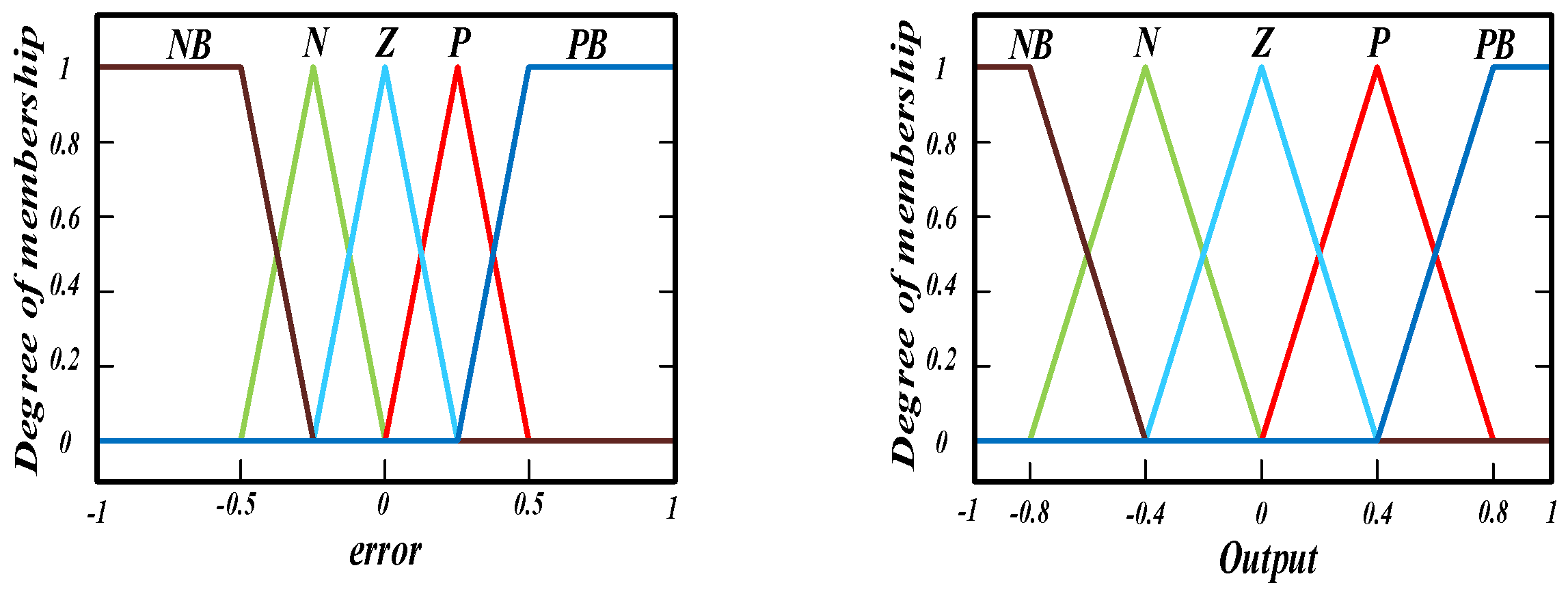
3.5. Fuzzy Logic Controller (FLC)
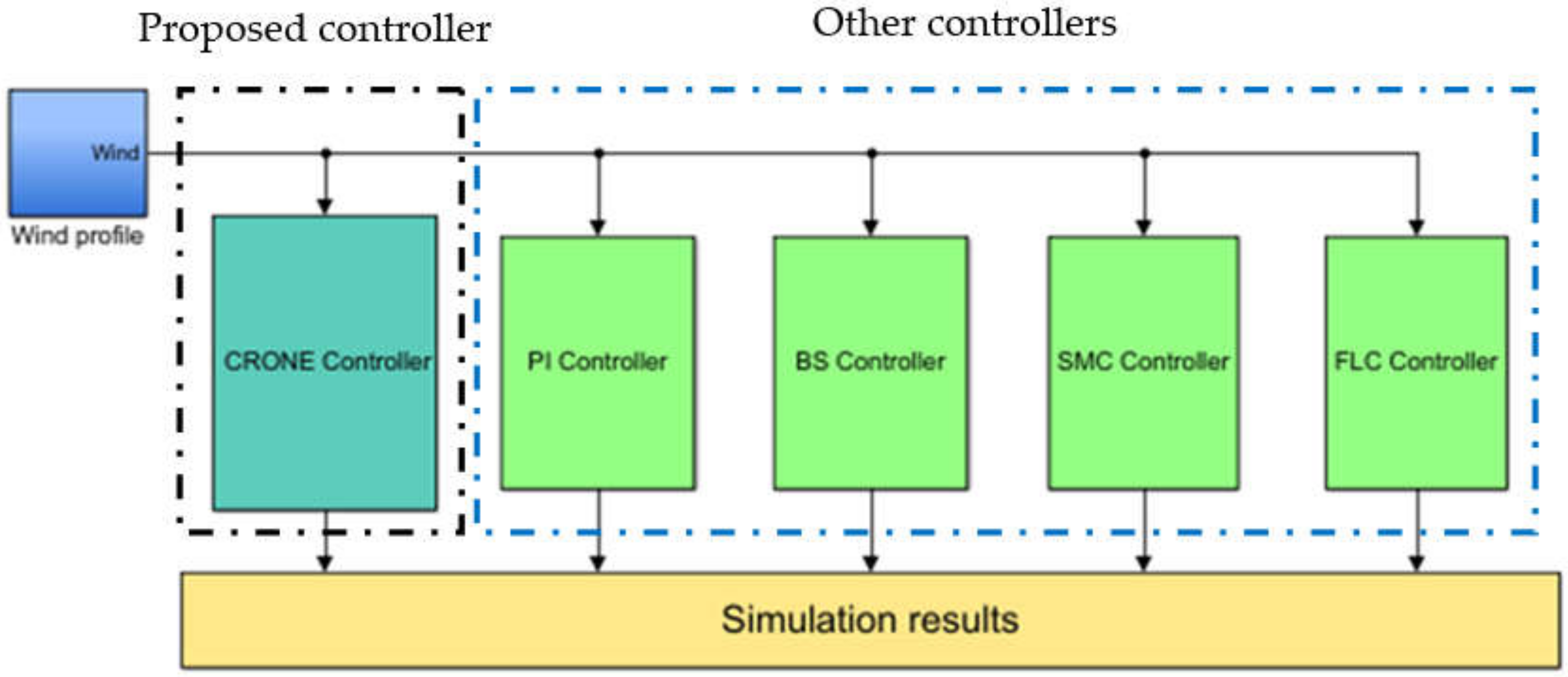
4. Results
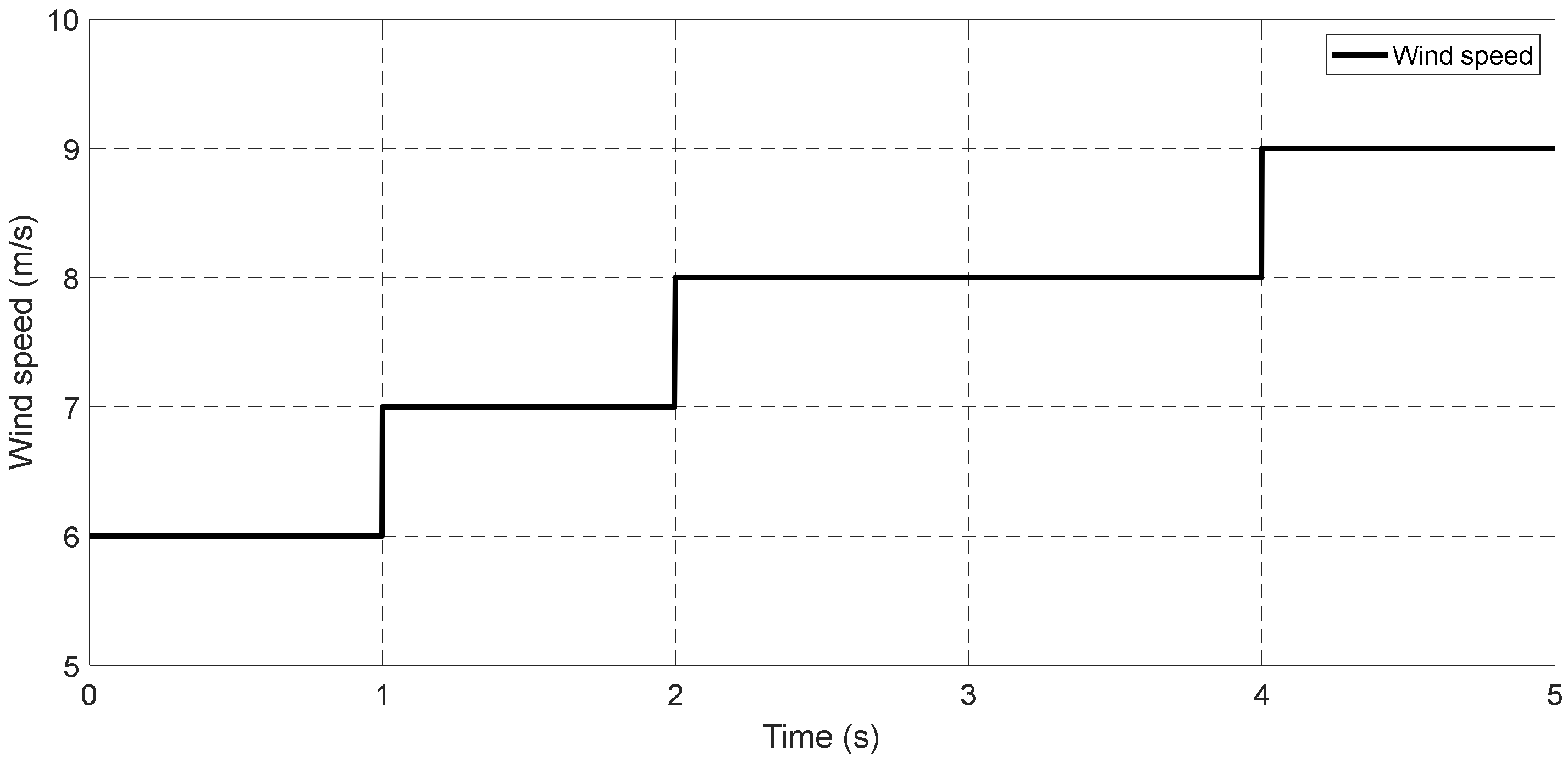
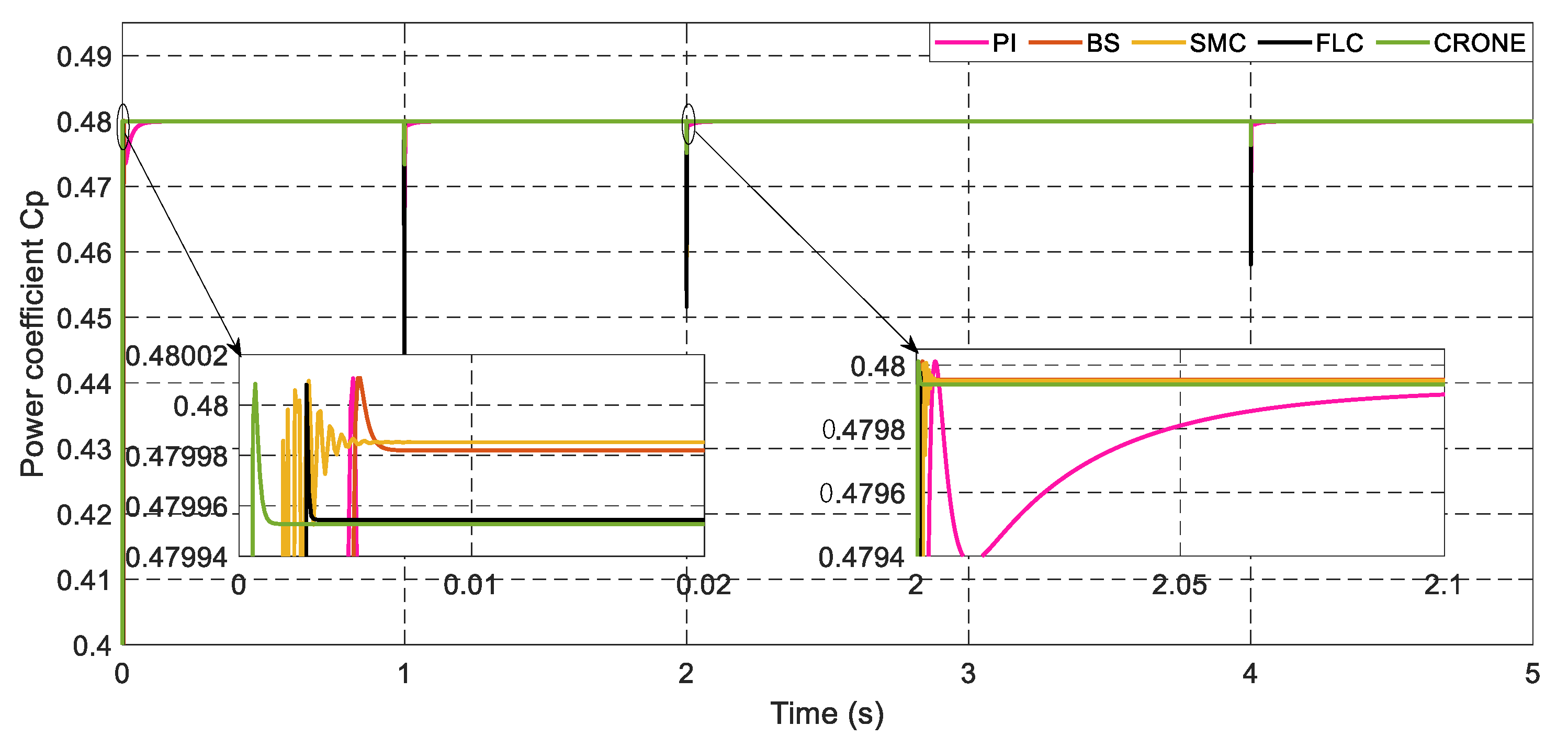
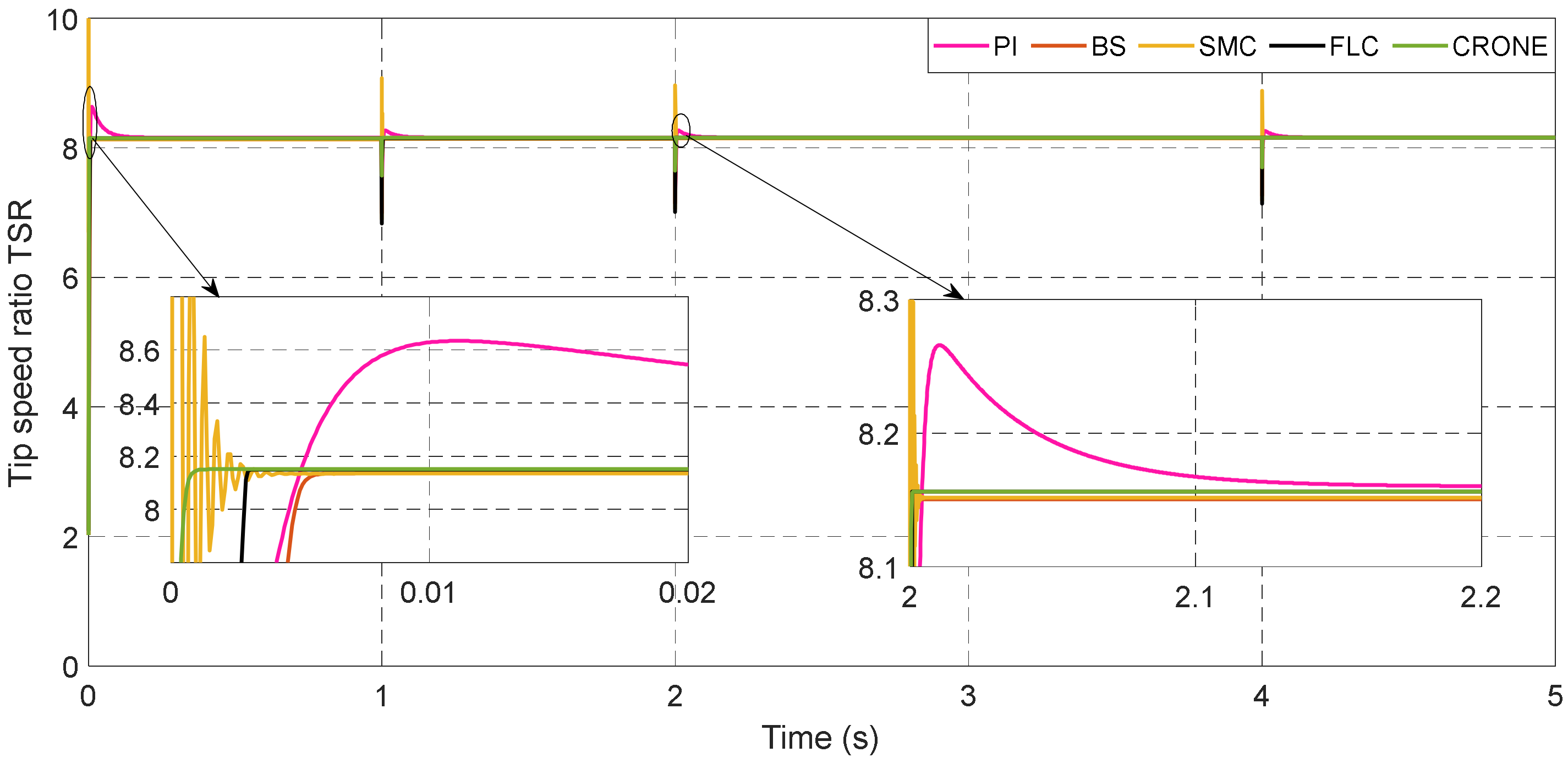
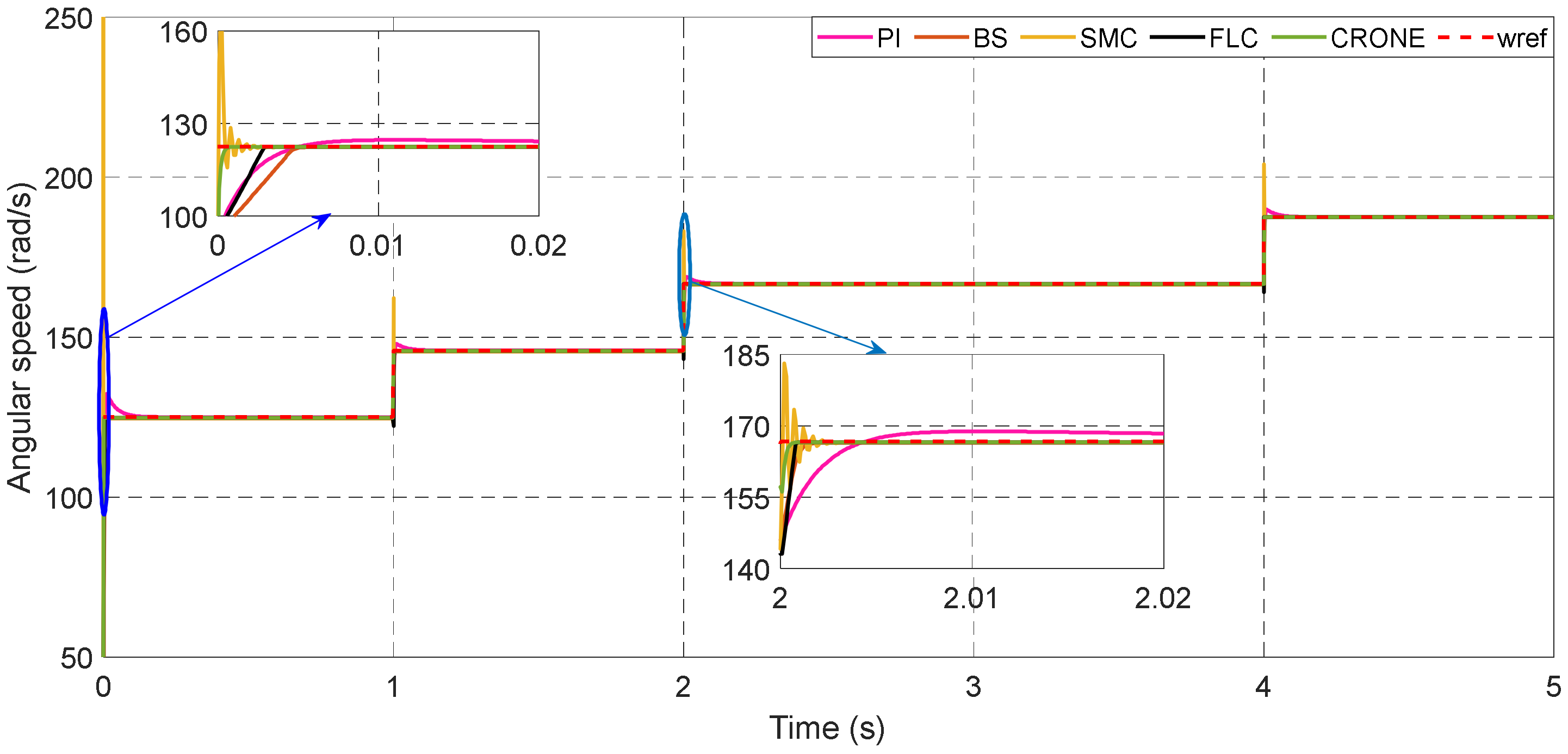
4.1. Tracking Test with Speed Step Profile
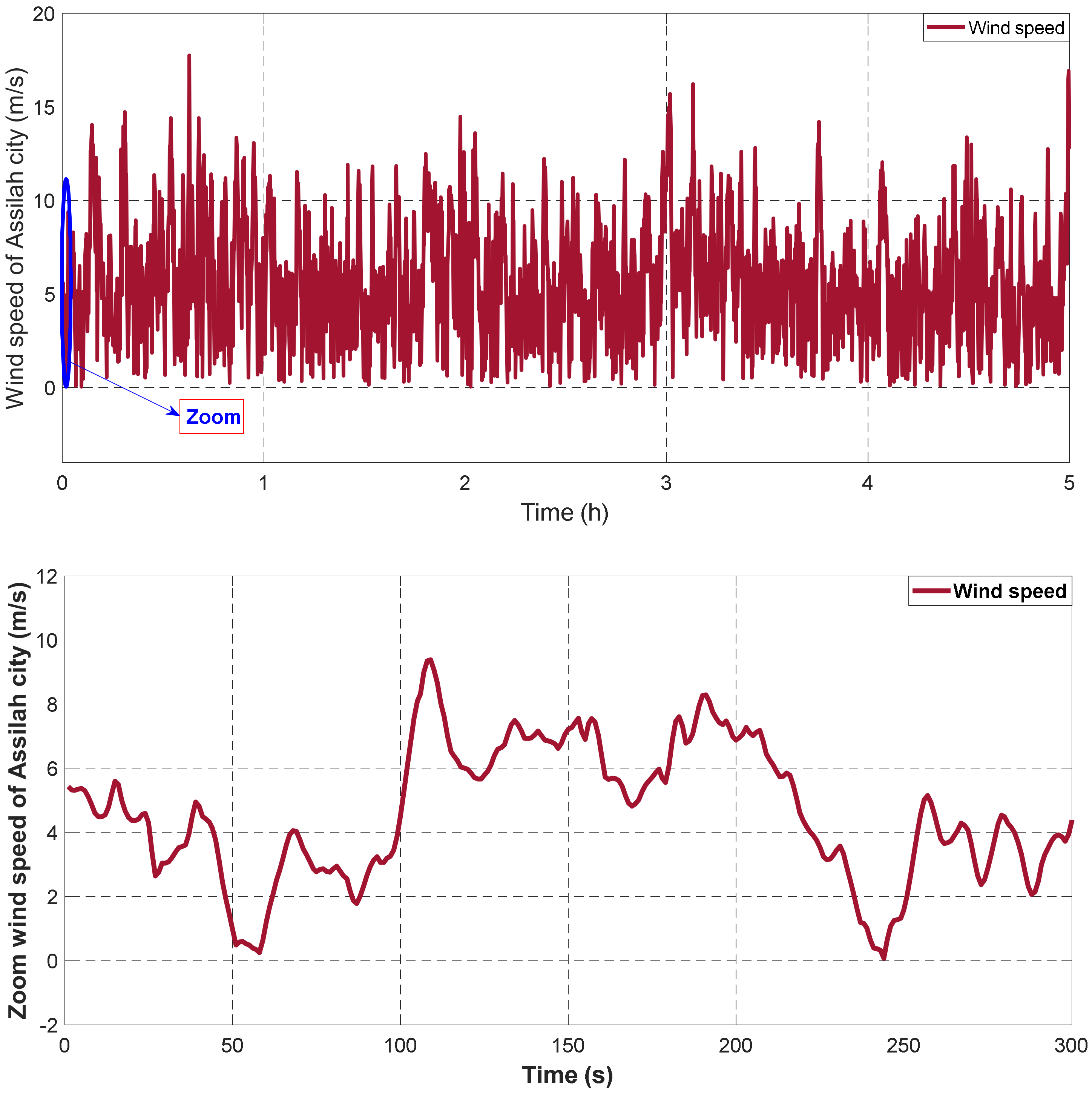
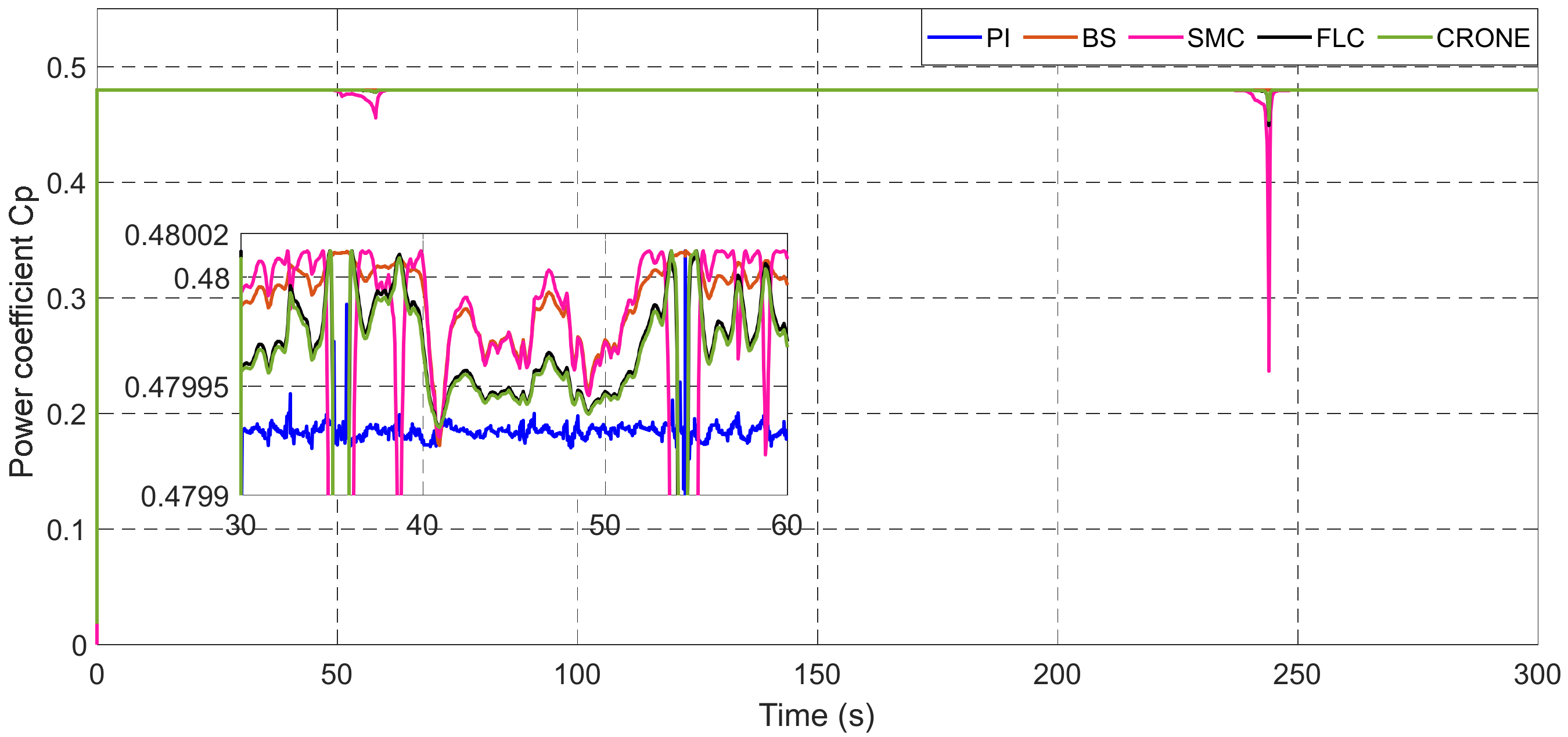
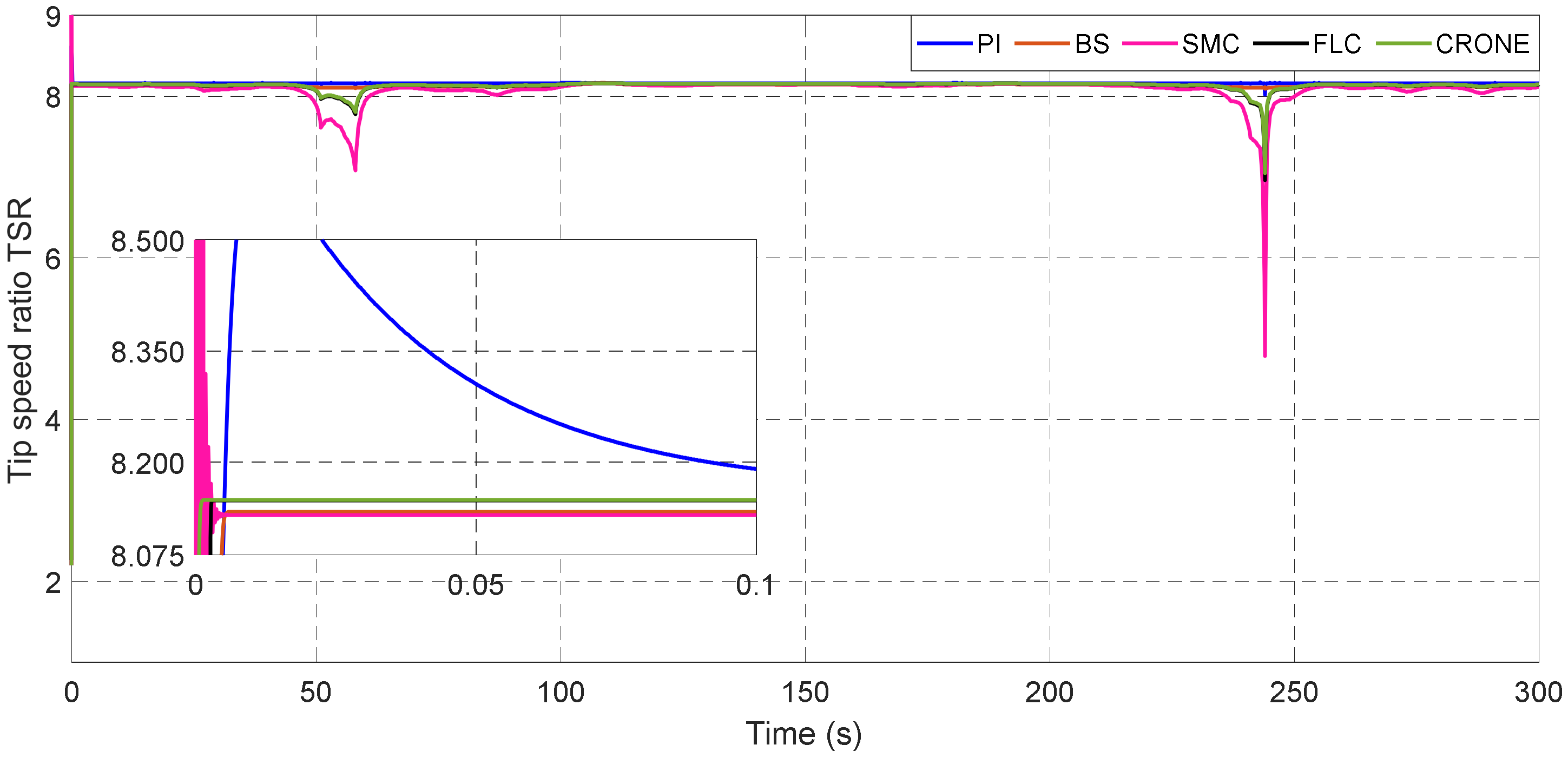
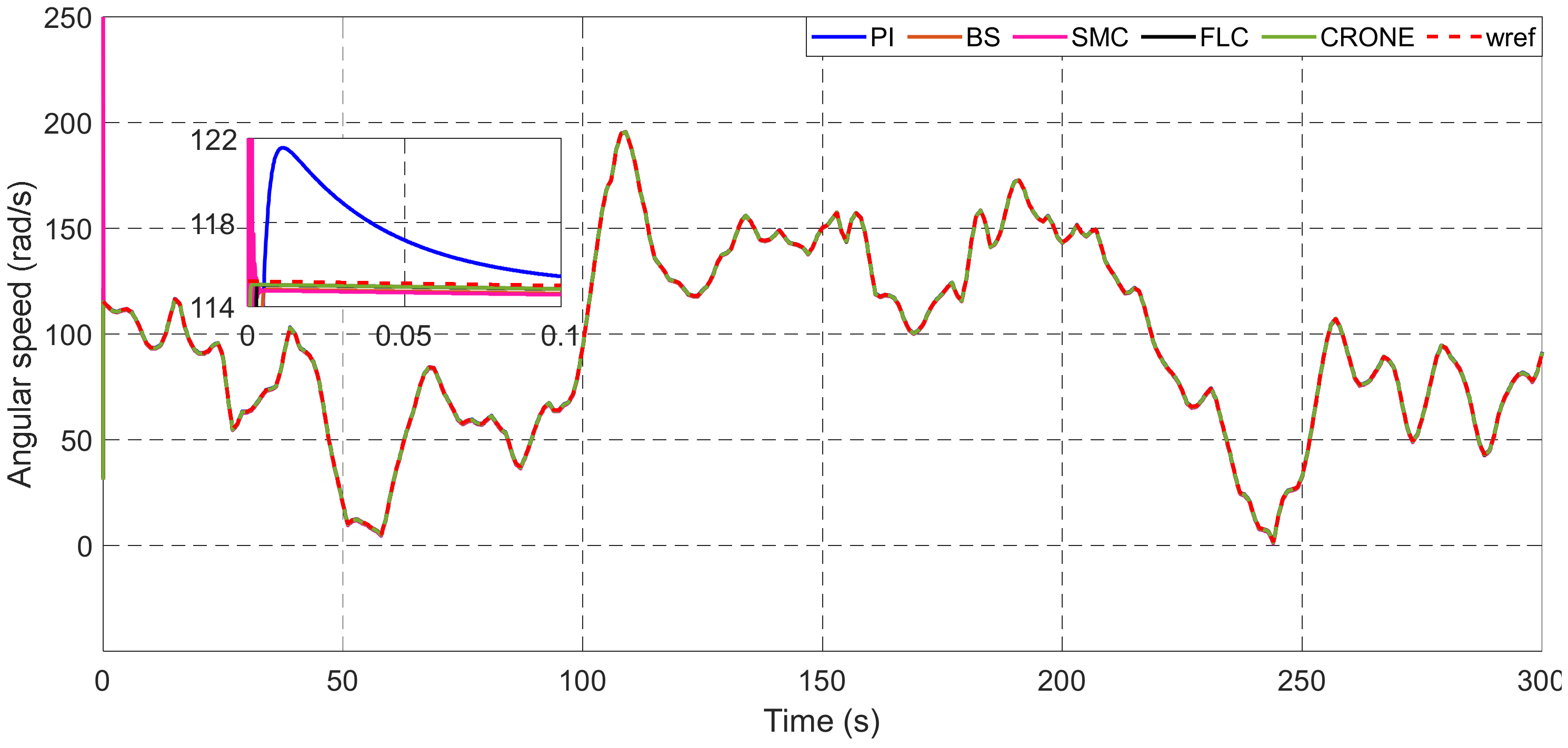
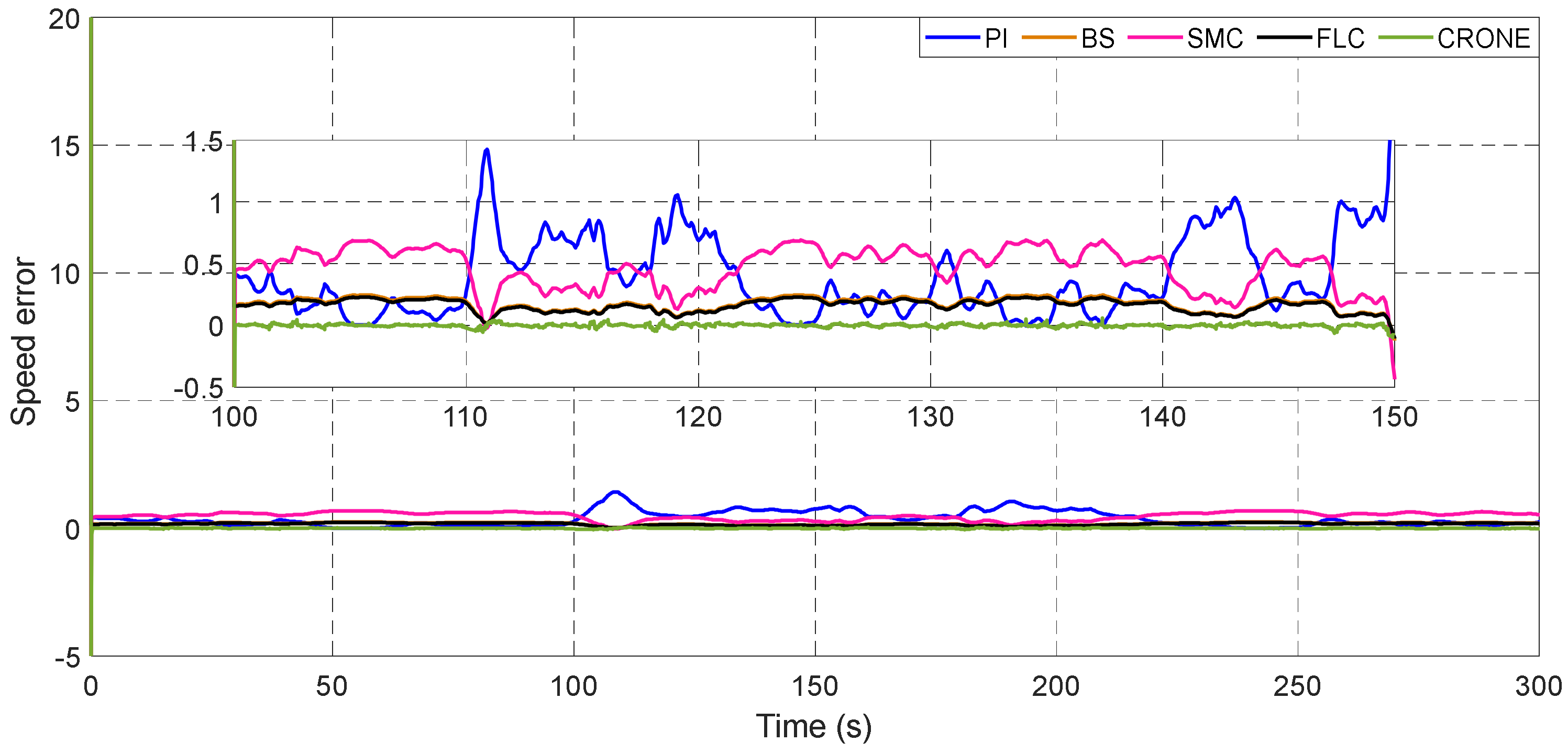
4.2. Tracking Test with Variable Real Wind Speed Profile
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yessef, M.; Bossoufi, B.; Taoussi, M.; Lagrioui, A.; Chojaa, H. Improved Hybrid Control Strategy of the Doubly-Fed Induction Generator Under a Real Wind Profile. In Digital Technologies and Applications; ICDTA 2021. Lecture Notes in Networks and Systems; Motahhir, S., Bossoufi, B., Eds.; Springer: Cham, Switzerland, 2021; Volume 211. [Google Scholar] [CrossRef]
- Hannachi, M.; Elbeji, O.; Benhamed, M.; Sbita, L. Optimal tuning of the proportional–integral controller using particle swarm optimization algorithm for control of permanent magnet synchronous generator based wind turbine with tip speed ratio for maximum power point tracking. Wind. Eng. 2021, 45, 400–412. [Google Scholar] [CrossRef]
- Bekiroglu, E.; Yazar, M.D. MPPT Control of Grid Connected DFIG at Variable Wind Speed. Energies 2022, 15, 3146. [Google Scholar] [CrossRef]
- Chhipa, A.A.; Kumar, V.; Joshi, R.R.; Chakrabarti, P.; Jasinski, M.; Burgio, A.; Leonowicz, Z.; Jasinska, E.; Soni, R.; Chakrabarti, T. Adaptive Neuro-Fuzzy Inference System-Based Maximum Power Tracking Controller for Variable Speed WECS. Energies 2021, 14, 6275. [Google Scholar] [CrossRef]
- Pan, L.; Zhu, Z.; Xiong, Y.; Shao, J. Integral Sliding Mode Control for Maximum Power Point Tracking in DFIG Based Floating Offshore Wind Turbine and Power to Gas. Processes 2021, 9, 1016. [Google Scholar] [CrossRef]
- Song, D.; Tu, Y.; Wang, L.; Jin, F.; Li, Z.; Huang, C.; Xia, E.; Rizk-Allah, R.M.; Yang, J.; Su, M.; et al. Coordinated optimization on energy capture and torque fluctuation of wind turbines via variable weight NMPC with fuzzy regulator. Appl. Energy 2022, 312, 118821. [Google Scholar] [CrossRef]
- Chen, Z.; Yin, M.; Zou, Y.; Meng, K.; Dong, Z.Y. Maximum Wind Energy Extraction for Variable Speed Wind Turbines with Slow Dynamic Behavior. IEEE Trans. Power Syst. 2017, 32, 3321–3322. [Google Scholar] [CrossRef]
- Rodríguez-Amenedo, J.L.; Arnaltes, S.; Rodríguez, M.A. Operation and Coordinated Control of Fixed and Variable Speed Wind Farms. Renew. Energy 2008, 33, 406–414. [Google Scholar]
- Yessef, M.; Bossoufi, B.; Taoussi, M.; Lagrioui, A.; El Mahfoud, M. Evaluation of Adaptive Backstepping Control Applied to DFIG Wind System Used on the Real Wind Profile of the Dakhla-Morocco City. In WITS 2020. Lecture Notes in Electrical Engineering; Bennani, S., Lakhrissi, Y., Khaissidi, G., Mansouri, A., Khamlichi, Y., Eds.; Springer: Singapore, 2022; Volume 745. [Google Scholar] [CrossRef]
- Bossoufi, B.; Karim, M.; Taoussi, M.; Aroussi, H.A.; Bouderbala, M.; Motahhir, S.; Camara, M.B. DSPACE-based implementation for observer backstepping power control of DFIG wind turbine. IET Electr. Power Appl. 2020, 14, 2395–2403. [Google Scholar] [CrossRef]
- Taoussi, M.; Bossoufi, B.; Bouderbala, M.; Motahhir, S.; Alkhammash, E.H.; Masud, M.; Zinelaabidine, N.; Karim, M. Implementation and Validation of Hybrid Control for a DFIG Wind Turbine Using an FPGA Controller Board. Electronics 2021, 10, 3154. [Google Scholar] [CrossRef]
- Zhou, F.; Liu, J. A Robust Control Strategy Research on PMSG-Based WECS Considering the Uncertainties. IEEE Access 2018, 6, 51951–51963. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Yatim, A.H.M.; Tan, C.W.; Saidur, R. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- Kumar, D.; Chatterjee, K. A Review of Conventional and Advanced MPPT Algorithms for Wind Energy Systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Elbeji, O.; Hannachi, M.; Benhamed, M.; Sbita, L. Maximum power point tracking control of wind energy conversion system driving a permanent magnet synchronous generator: Comparative study. Wind. Eng. 2021, 45, 1072–1081. [Google Scholar] [CrossRef]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. Modeling, analysis and comparison of TSR and OTC methods for MPPT and power smoothing in permanent magnet synchronous generator-based wind turbines. Energy Convers. Manag. 2014, 86, 892–900. [Google Scholar] [CrossRef]
- Hannachi, M.; Elbeji, O.; Benhamed, M.; Sbita, L. Comparative study of four MPPT for a wind power system. Wind. Eng. 2021, 45, 1613–1622. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Yatim, A.H.M.; Tan, C.W. An Online Optimum-Relation-Based Maximum Power Point Tracking Algorithm for Wind Energy Conversion System. In Proceedings of the 2014 Australasian Universities Power Engineering Conference, AUPEC 2014—Proceedings, Perth, WA, Australia, 28 September–1 October 2014. [Google Scholar]
- Lalouni, S.; Rekioua, D.; Idjdarene, K.; Tounzi, A. Maximum Power Point Tracking Based Hybrid Hill-Climb Search Method Applied to Wind Energy Conversion System. Electr. Power Compon. Syst. 2015, 43, 1028–1038. [Google Scholar] [CrossRef]
- Hosseini, S.H.; Farakhor, A.; Haghighian, S.K. Novel Algorithm of Maximum Power Point Tracking (MPPT) for Variable SpeedPMSG Wind Generation Systems through Model Predictive Control. In Proceedings of the ELECO 2013—8th International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 28–30 November 2013; pp. 243–247. [Google Scholar]
- Hohm, D.P.; Ropp, M.E. Comparative Study of Maximum Power Point Tracking Algorithms. Prog. Photovolt. Res. Appl. 2003, 11, 47–62. [Google Scholar] [CrossRef]
- Cheng, M.; Zhu, Y. The State of the Art of Wind Energy Conversion Systems and Technologies: A Review. Energy Convers. Manag. 2014, 88, 332–347. [Google Scholar] [CrossRef]
- Pagnini, L.C.; Burlando, M.; Repetto, M.P. Experimental Power Curve of Small-Size Wind Turbines in Turbulent Urban Environment. Appl. Energy 2015, 154, 112–121. [Google Scholar] [CrossRef]
- Apata, O.; Oyedokun, D.T.O. An Overview of Control Techniques for Wind Turbine Systems. Sci. Afr. 2020, 10, e00566. [Google Scholar] [CrossRef]
- Ata, R. Artificial Neural Networks Applications in Wind Energy Systems: A Review. Renew. Sustain. Energy Rev. 2015, 49, 534–562. [Google Scholar] [CrossRef]
- Thongam, J.S.; Bouchard, P.; Ezzaidi, H.; Ouhrouche, M. Artificial Neural Network-Based Maximum Power Point Tracking Control for Variable Speed Wind Energy Conversion Systems. In Proceedings of the IEEE International Conference on Control Applications, St. Petersburg, Russia, 8–10 July 2009; pp. 1667–1671. [Google Scholar]
- Song, D.; Li, Z.; Wang, L.; Jin, F.; Huang, C.; Xia, E.; Rizk-Allah, R.M.; Yang, J.; Su, M.; Joo, Y.H. Energy capture efficiency enhancement of wind turbines via stochastic model predictive yaw control based on intelligent scenarios generation. Appl. Energy 2022, 312, 118773. [Google Scholar] [CrossRef]
- Moradi, H.; Vossoughi, G. Robust control of the variable-speed wind turbines in the presence of uncertainties: Acomparison between H∞ and PID controllers. Energy 2015, 90, 1508–1521. [Google Scholar] [CrossRef]
- Mseddi, A.; Le Ballois, S.; Aloui, H.; Vido, L. Robust control of a wind conversion system based on a hybrid excitation synchronous generator: A comparison between H∞ and CRONE controllers. Math. Comput. Simul. 2019, 158, 453–476. [Google Scholar] [CrossRef]
- Benine-Neto, X.; Moreau, P. Lanusse, Robust control for an electro-mechanical anti-lock braking system: The CRONE approach. IFAC-PapersOnLine 2017, 50, 12575–12581. [Google Scholar] [CrossRef]
- Bouvin, J.L.; Moreau, X.; Benine-Neto, A.; Oustaloup, A.; Serrier, P.; Hernette, V. CRONE control of a pneumatic self-leveling suspension system. IFAC-PapersOnLine 2017, 50, 13816–13821. [Google Scholar] [CrossRef]
- Hannachi, M.; Elbeji, O.; Benhamed, M.; Sbita, L. Optimal torque maximum power point technique for wind turbine: Proportional–integral controller tuning based on particle swarm optimization. Wind. Eng. 2021, 45, 337–350. [Google Scholar] [CrossRef]
- Lanusse, P.; Sabatier, J.; Nelson Gruel, D.; Oustaloup, A. Second and Third Generation CRONE Control-System Design. In Fractional Order Differentiation and Robust Control Design. Intelligent Systems, Control and Automation: Science and Engineering; Springer: Dordrecht, The Netherlands, 2015; Volume 77. [Google Scholar] [CrossRef]
- Oustaloup, A. Systèmes Asservis Linéaires D’ordre Fractionnaire; Masson: Paris, France, 1983. [Google Scholar]
- Oustaloup, A. La Commande CRONE; Hermes Editor: Paris, France, 1991. [Google Scholar]
- Oustaloup, A.; Mathieu, B.; Lanusse, P. The CRONE control of resonant plants: Application to a flexible transmission. Eur. J. Control. 1995, 1, 113–121. [Google Scholar] [CrossRef]
- Lanusse, P. De la Commande CRONE de Première Génération à la Commande CRONE de Troisième Generation. Ph.D. Thesis, University Bordeaux I, Bordeaux, France, 1994. [Google Scholar]
- Åström, K.J. Model Uncertainty and Robust Control Design; COSY Workshop, ESF Course: Valencia, Spain, 1999. [Google Scholar]
- Lanusse, P.; Oustaloup, A.; Sabatier, J. Step-by-step presentation of a 3rd generation CRONE controller design with an anti-windup system. In Proceedings of the Fifth EUROMECH Nonlinear Dynamics Conference, Eindhoven, The Netherlands, 7–12 August 2005. [Google Scholar]
- Lanusse, P.; Oustaloup, A.; Sutter, D. Multi-scalar CRONE control of multivariable plants. In Proceedings of the WAC’96-ISIAC Symphosia, Montpellier, France, 27–30 May 1996. [Google Scholar]
- Lanusse, P.; Malti, R.; Melchior, P. CRONE control system design toolbox for the control engineering community: Tutorial and case study. Philos. Trans. R. Soc. A 2012, 371, 0149. [Google Scholar] [CrossRef] [Green Version]
- Bode, H.W. Network Analysis and Feedback Amplifier Design; Van Nostrand: New York, NY, USA, 1945. [Google Scholar]
- CRONE Toolbox. Available online: http://cronetoolbox.ims-bordeaux.fr (accessed on 21 April 2022.).
- Xiao, F.; Zhang, Z.; Yin, X. Fault Current Characteristics of the DFIG under Asymmetrical Fault Conditions. Energies 2015, 8, 10971–10992. [Google Scholar] [CrossRef] [Green Version]
- Bossoufi, B.; Karim, M.; Taoussi, M.; Aroussi, H.A.; Bouderbala, M.; Deblecker, O.; Motahhir, S.; Nayyar, A.; Alzain, M.A. Rooted Tree Optimization for the Backstepping Power Control of a Doubly Fed Induction Generator Wind Turbine: dSPACE Implementation. IEEE Access 2021, 9, 26512–26522. [Google Scholar] [CrossRef]
- Taoussi, M.; Karim, M.; Bossoufi, B.; Hammoumi, D.; El Bakkali, C.; Derouich, A.; El Ouanjli, N. Low-Speed Sensorless Control for Wind Turbine System. WSEAS Trans. Syst. Control. 2017, 12, 405–417. [Google Scholar]
- Yessef, M.; Bossoufi, B.; Taoussi, M.; Lagrioui, A. Enhancement of the direct power control by using backstepping approach for a doubly fed induction generator. Wind. Eng. 2022. [Google Scholar] [CrossRef]
- Yessef, M.; Bossoufi, B.; Taoussi, M.; Lagrioui, A.; Chojaa, H.; Majout, B.; El Alami, H. Robust Control of a Wind Conversion System Based on a Doubly Fed Induction Generator: A Comparison Between Adaptive Backstepping and Integral Sliding Mode Controllers. In Digital Technologies and Applications; ICDTA 2022. Lecture Notes in Networks and Systems; Motahhir, S., Bossoufi, B., Eds.; Springer: Cham, Switzerland, 2022; Volume 454. [Google Scholar] [CrossRef]
- Chojaa, H.; Derouich, A.; Chehaidia, S.E.; Zamzoum, O.; Taoussi, M.; Elouatouat, H. Integral sliding mode control for DFIG based WECS with MPPT based on artificial neural network under a real wind profile. Energy Rep. 2021, 7, 4809–4824. [Google Scholar] [CrossRef]
- Li, P.; Xiong, L.; Wu, F.; Ma, M.; Wang, J. Sliding mode controller based on feedback linearization for damping of sub-synchronous control interaction in DFIG-based wind power plants. Int. J. Electr. Power Energy Syst. 2019, 107, 239–250. [Google Scholar] [CrossRef]
- Chojaa, H.; Derouich, A.; Taoussi, M.; Zamzoum, O.; Yessef, M. Optimization of DFIG Wind Turbine Power Quality Through Adaptive Fuzzy Control. In Digital Technologies and Applications; ICDTA 2021. Lecture Notes in Networks and Systems; Motahhir, S., Bossoufi, B., Eds.; Springer: Cham, Switzerland, 2021; Volume 211. [Google Scholar] [CrossRef]
- Aissaoui, H.E.; Ougli, A.E.; Tidhaf, B. Neural Networks and Fuzzy Logic Based Maximum Power Point Tracking Control for Wind Energy Conversion System. Adv. Sci. Technol. Eng. Syst. J. 2021, 6, 586–592. [Google Scholar] [CrossRef]
- Tiwari, R.; Babu, N.R. Fuzzy logic based MPPT for permanent magnet synchronous generator in wind energy conversion system. IFAC 2016, 49, 462–467. [Google Scholar] [CrossRef]
- Nadour, M.; Essadki, A.; Nasser, T. Comparative analysis between PI & backstepping control strategies of DFIG driven by wind turbine. Int. J. Renew. Energy Resour. 2017, 7, 1307–1316. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output | de(t) | |||||
|---|---|---|---|---|---|---|
| NB | N | Z | P | PB | ||
| e(t) | NB | NB | NB | N | N | Z |
| N | NB | N | N | Z | P | |
| Z | NB | N | Z | P | P | |
| P | N | Z | P | P | PB | |
| PB | Z | P | P | PB | PB | |
| Parameters | Value |
|---|---|
| Number of blades | 3 |
| Blade radius R | 35.25 m |
| Gearbox gain G | 90 |
| Friction coefficient (Fv) | 2.4·10−3 N.m.s/rad |
| Moment of inertia (J) | 1000 kg.m2 |
| Performance | PI | BS | SMC | FLC | CRONE |
|---|---|---|---|---|---|
| Response time (ms) | 200 | 5.2 | 3.5 | 4 | 1.2 |
| Static errors (%) | 4.3 | 2.1 | 3.5 | 0.9 | 0.3 |
| Set-point tracking | Good | Good | Good | Very good | Very good |
| Precision | Medium | Medium | High | Very high | Very high |
| Performance | PI | BS | SMC | FLC | CRONE |
|---|---|---|---|---|---|
| Response time (ms) | 255 | 6.4 | 5.5 | 4 | 2.1 |
| Dynamic errors (%) | 8.3 | 4.1 | 6.1 | 0.9 | 0.45 |
| Set-point tracking | Good | Good | Good | Very good | Very good |
| Precision | Medium | Medium | High | Very high | Very high |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yessef, M.; Bossoufi, B.; Taoussi, M.; Motahhir, S.; Lagrioui, A.; Chojaa, H.; Lee, S.; Kang, B.-G.; Abouhawwash, M. Improving the Maximum Power Extraction from Wind Turbines Using a Second-Generation CRONE Controller. Energies 2022, 15, 3644. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103644
Yessef M, Bossoufi B, Taoussi M, Motahhir S, Lagrioui A, Chojaa H, Lee S, Kang B-G, Abouhawwash M. Improving the Maximum Power Extraction from Wind Turbines Using a Second-Generation CRONE Controller. Energies. 2022; 15(10):3644. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103644
Chicago/Turabian StyleYessef, Mourad, Badre Bossoufi, Mohammed Taoussi, Saad Motahhir, Ahmed Lagrioui, Hamid Chojaa, Sanghun Lee, Byeong-Gwon Kang, and Mohamed Abouhawwash. 2022. "Improving the Maximum Power Extraction from Wind Turbines Using a Second-Generation CRONE Controller" Energies 15, no. 10: 3644. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103644