
Battery-Conscious, Economic, and Prioritization-Based Electric Vehicle Residential Scheduling



1
Center of Excellence in Energy and Power Systems, Federal University of Santa Maria, Santa Maria 97105-900, Brazil
2
Center for Research on Microgrids, Aalborg Universitet, 9000 Aalborg, Denmark
*
Author to whom correspondence should be addressed.
Energies 2022, 15(10), 3714; https://0-doi-org.brum.beds.ac.uk/10.3390/en15103714
Submission received: 24 March 2022
/
Revised: 6 May 2022
/
Accepted: 13 May 2022
/
Published: 19 May 2022
(This article belongs to the Special Issue Electric Vehicle Charging: Social and Technical Issues)
Abstract
:Advances in communication technologies and protocols among vehicles, charging stations, and controllers have enabled the application of scheduling techniques to prioritize EV fleet charging. From the perspective of users, residential EV charging must particularly address cost-effective solutions to use energy more efficiently and preserve the lifetime of the battery—the most expensive element of an EV. Considering this matter, this research addresses a residential EV charging scheduling model including battery degradation aspects when discharging. Due to the non-linear characteristics of charging and battery degradation, we consider a mixed integer non-linearly constrained formulation with the aim of scheduling the charging and discharging of EVs to satisfy the following goals: prioritizing charging, reducing charging costs and battery degradation, and limiting the power demand requested to the distribution transformer. The results shows that, when EVs are discharged before charging up within a specific state-of-charge range, degradation can be reduced by 5.3%. All charging requests are completed before the next-day departure time, with 16.35% cost reduction achieved by scheduling charging during lower tariff prices, in addition to prevention of overloading of the distribution transformer.
1. Introduction
Advances and improvements in rechargeable battery technology encourage electric mobility, which is expected to bring profound changes in energy consumption in the near future, especially when considering the large-scale dissemination of this emerging technology. Studies have suggested that private chargers are the main choices of users for electric vehicle (EV) charging, due to the convenience of residential charging [1,2,3]. To alleviate the technical and economic disadvantages created by increasing demand, extensive surveys have focused on taking advantage of controllable recharging rates and charging scheduling. Several coordinated schemes have been proposed in the literature to level, delay, and regulate EV charging, in order to not compromise the stability of power systems, increase revenue for fleet operators, or reduce user costs [4]. Thus, a proper coordination and control architecture is necessary, which requires good communication infrastructure for effective source/load management.
From the perspective of EV dis/charging optimization, the most widespread strategies in the literature contemplate reducing charging costs [5], minimizing peak loads [6], energy costs [7], frequency regulation [8], and power losses and voltage variation [9]. The potential for improving battery life by optimizing the charging strategy has been investigated in [10], where it was shown that reasonable planning of the charging strategy can double the battery life.
In electricity markets, owners of battery energy storage systems, such as electric vehicles, must bid in such a way that their revenues will at least cover their true operating costs. A piecewise linear cost function for modeling battery cycle aging to assess the actual operating profitability of batteries, in order to maximize the operating profit in electricity markets, has been introduced in [11].
In this work, the considered perspective is not to submit offers and bids to participate in electricity markets but, instead, to increase the amount of energy available for charging EVs in a community at lower cost while preserving battery lifetime. Furthermore, this strategy must not harm the user neither the grid, such that the scheduling is executed according to user preferences regarding the desired SoC level at departure time.
User profit maximization can be achieved using heuristic algorithms accounting for battery degradation, as well as variable electricity costs and incentives, in a large distribution system [12]. A house energy management system strategy was proposed in [13] to coordinate the operations associated with the household load demand, including charging and discharging. A fixed charging rate and fixed battery degradation cost were considered for all SoC levels, in order to reduce the daily energy cost and peak-to-average ratio, as well as alleviating distribution transformer stresses.
However, they did not comprehensively interpret the non-linear SoC function and battery degradation, which are both affected by charging and discharging. A routing problem for EVs has been formulated as an integer programming model, based on a non-linear charging model and practical battery wear model, in [14]. A piecewise linear approximation of the CC–CV charging process was presented, but each segment of the regression was considered to have a fixed charging rate, making it uncontrollable.
The battery charge rate used in this study is no longer a constant value, but a function related to the current state of the battery at each time step and the charging needs. The charging time depends not only on the battery status of the vehicle when it arrives at the charging station and the vehicle’s subsequent departure time, but also the trade-off between the tariff cost for charging and battery wear, meaning that the charging rate is the decision variable of the problem.
The proposed battery wear model application takes into account the specific charging rate that determines the amount of power delivered to each electric vehicle as, in real-world applications, the charging power is not constant. This strategy provides a close relationship between dis/charging rates and the actual degradation cost. Furthermore, it introduces customized battery wear functions, as the wear incurred by cycling the battery may vary depending on the characteristics of each EV model. In addition, the existing literature has not systematically and deeply studied a complete optimization model and its solution algorithm for a residential charging strategy to benefit the EV community. This study is motivated by optimal scheduling, which aims to reduce the operational costs of charging, with respect to the cost of charging, charging time, and battery degradation, while considering the power limitations of the distribution transformer.
The remainder of this article is structured as follows: Section 2 presents the related research on EV charging strategies, as well as communication and control aspects. Section 3 deals with the theoretical background of modeling characteristics for charging infrastructure use, which are used as input data for the optimization problem. Section 4 presents the battery degradation model. Section 5 introduces the energy management system mathematical modeling process, comprising the optimization problem. Section 6 describes the diagnosis of EV energy requirements and provides the optimization results. Section 7 evaluates the obtained results in the context of improvements on previous methodologies. Finally, our conclusions are presented in Section 8.
2. EV Dis/Charging Management
This section aims to subsidize the development of an energy management system within the framework of a low-voltage residential distribution system. In this context, general requirements, in terms of equipment and communication aspects between the vehicle, charging station, and controller are addressed, in order to enable the computational application of prioritization techniques and EV dis/charging scheduling, allowing for development of the proposed optimization problem. Information related to energy needs must be available to enable intelligent charging, which can be studied from various perspectives, usually involving the following key factors:
- Charging duration;
- Mobility/parking pattern;
- Battery State of Charge (SoC);
- Charging method;
- Type and number of simultaneously charging vehicles.
The literature has demonstrated that such information is essential for scheduling dis/charging processes [9]. The term intelligence relates to the extensive use of information from system elements to program processes used to increase the overall efficiency. The controller manages optimal dis/charging of multiple EVs, in addition to evenly distribute the load and provide flexibility when there is an increase in the number of vehicles.
However, to make the dis/charging coordination scheme effective, a good communication structure is needed. In this sense, there are four sets of main standards regarding EVs: plugs, communication, charging topology, and security [15]. In the first level, the ISO/IEC 15118 standard is used for communication between EVs and charging stations, while the IEC 61850 standard is used for communication between charging stations in a successive level [15]. The intelligent charging mechanism covered by the ISO/IEC 15118 makes it possible to combine network capacity with the demand of connected EVs, as treated in this study.
Management system controls may be in the cloud or on a specific server with internet access, and can communicate with routers that control chargers through a local area network (LAN) using an Ethernet, Wi-Fi, or cellular network (e.g., 3G, 4G, or 5G) connection [16]. The charger communicates with the EV through a cable, while vehicle and user IDs can be communicated from a device with internet access, such as a smartphone.
It is assumed that some information will be collected by the controller a priori, as well as information regarding the base demand of the distribution transformer. More specifically, connection and disconnection times and power demand are critical constraints making the optimal scheduling of dis/charging significant. This premise is assumed as, in an intelligent control system for EV charging, the controller must obtain basic information to make decisions and fulfill the required tasks.
Thus, although the physical application of a management system is outside the proposed scope, by delimiting it to a computational implementation, the characteristics and general requirements to analyze the possible effects of an optimal scheduling algorithm are presented. Practical implementation of the obtained results depends on the features and functionalities of the smart grid.
The increase in demand due to the inclusion of EVs in the grid may compromise the system reliability and require reinforcements in the transmission and distribution of energy [17]. Charging control schemes have been well-disseminated in literature [4]. Prevention against overloads can be assured by means of intelligent control due to minimization of demand peaks, as in [18]. In this case, a mixed integer linear programming problem is solved to coordinate the charging of EVs in an unbalanced distribution system.
In general, users perform daily charging, even when there is still enough energy left to cover the next day’s journey. This practice has been called range anxiety, which reduces battery life due to an increase in dis/charging cycles, as has been highlighted by [19]. Different battery life preservation strategies can be found in the literature. Rest periods by a pulse trajectory during charging has been considered as a strategy to reduce degradation [20]. A weight/rank factor has been proposed to prioritize charging in a parking lot, considering battery aging to calculate charging priorities and maximize the SoC [14]. A day-ahead tariff has been used to optimize charging by considering battery lifetime in favor of SoC maximization [20].
An EV charging management system in a commercial building based on a battery degradation cost model has been introduced in [21]. Although the cost reduction does not arise from an optimization scheme, a battery degradation cost is directly generated from a wear density function, making it easier to use in EV charging optimization schemes by providing a practical measure of wearing cost. This strategy is adopted in the present research, as it can be easily customized for each type of battery because it incorporates a generalized form of life cycle data. This way, SoC or its derivatives (e.g., DoD) are used as parameters for battery degradation cost index formulation.
3. Demand Estimation
EV users have multiple options in terms of charging duration, which can be described by different levels of final SoC, according to their preference. The charging service provider is interested in the hourly demand profile for charging the fleet (referred to as the charging profile or charging schedule), as it should account for grid limitations. In a centralized framework, the fleet operator defines charging profiles according to constraints determined by the following information:
- The instant at which the EV is connected for charging;
- The instant when the EV should be disconnected;
- The total amount of energy required in this period;
- The total amount of energy available for discharging;
- Operational and grid limitations.
This information can be derived from the charging option chosen, which reconciles driver and controller perspectives. In short, the user must inform the charging option based on two variables: Desired SoC and time available for scheduling. Demand estimation for consumer units connected to the transformer, as well as charging infrastructure usage, should serve as guidelines in scheduling system design. In this sense, information regarding arrival and departure times denote the period in which the EV will remain parked, as well as the possibility to start charging or discharging. In terms of the fleet, this information also indicates the number of EVs connected in a given period, whose aggregate demand must be below certain limits in favor of energy quality.
Information on EV demand is generally presented in the form of SoC at connection time. The amount of energy remaining in an EV battery, together with battery capacity, indicate the amount of energy that must be delivered to the EV before its departure. Thus, estimation of the parking pattern and EV demand define the available time window for scheduling of each participant, as well as transformer energy requirements.
To address uncertainties, such as the unanticipated use of charging infrastructure and the respective associated demand, statistical, stochastic, or deterministic approaches may be adopted. Due to the scarcity of real data, some authors have made use of parametric distributions to estimate the EV demand pattern, of which the most common are Normal and Poisson distributions. While a Poisson distribution has been adopted by [22], from urban traffic data collection, to estimate the connection time, normal distributions were adopted to estimate the disconnection time and initial SoC of EVs.
While some authors have modeled user behavior exclusively in a random manner, such as [17,18], statistical data based on urban mobility pattern have been used, by [23], to estimate the impact that EV demand exerts on a residential distribution network. In this case, a probabilistic model based on Monte Carlo simulation (MCS) demonstrated that charging execution times are more in line with reality than the adoption of a parametric distribution based on a single mean value.
The probabilistic model proposed in [23] considers different types, models, battery capacities, initial SoC, charging power, and EV energy consumption in order to model energy demand, as well as when charging activities will occur. In this case, the mobility pattern of Brazilians was analyzed, based on frequency, purpose, distance traveled, and time and duration of trips, derived in a statistical manner from survey data [24].
The probable connection time window, as well as the energy demand required for charging, can be estimated based on the usage patterns of vehicles powered by internal combustion engines, due to greater data availability. Thus, a strategy similar which segregates users into two categories—regular and irregular—has been adopted in order to contemplate both deterministic and stochastic use characteristics of charging infrastructure at the same time [25]. In this case, the approaches are divided in equal proportions and informed a priori to the central controller.
3.1. Regular Users
Characteristics of different pure EVs and plug-in hybrids models, as well as an urban mobility pattern survey, were used as input data to an algorithm that aims to estimate EV power demand [23]. Implemented in MATLAB®, an MCS-based algorithm performed the following steps:
- EV characteristics: the proposed algorithm randomly draws 10 EV models, uniformly distributed, in order to consider important characteristics such as battery capacity and maximum permissible charging power;
- Travel frequency: the frequency of EV use is estimated using a probability distribution based on [24]. This distribution divides trip frequency occurrence into: Daily, 3 to 4 days, 1 to 2 days, and rarely or never;
As each reason for travel is associated with certain times, the remaining state of charge () in each EV battery can be calculated—considering the consumption () given in kWh/km, the distance travelled () in km, frequency (f), and battery capacity () in kWh—individually for each EV n in relation to a total of N EVs, as expressed in Equation (1).
Thus, it is possible to make use of this information to estimate the EV connection and disconnection pattern from the probabilities of occurrences. These probabilities are described by random numbers from MCS, as described for the aforementioned algorithm proposed by [23].
3.2. Irregular Users
Although most drivers follow a certain pattern of mobility on most days, the dis/charging management system must be able to handle a stochastic EV demand characteristic. In this case, user irregularity is treated exclusively in a random manner, as in [20,26]. The stochastic characteristics of arrivals/departures, initial SoC, as well as type and model of EVs are estimated from a uniform random distribution modeled within the interval [0, 1].
3.3. Distribution Transformer Load Curve
Typical consumer behavior data extracted from a measurement campaign was used to estimate the load curve of the distribution transformer, as in [23]. Consumers are divided into monthly energy consumption classes, each one represented by a typical consumption curve, as detailed in Table 2. The load curve for each consumption class is shown in Figure 2a, represented in yellow, green, brown, blue, and red, respectively for 0–100 kWh, 101–220 kWh, 221–500 kWh, 501–1000 kWh and >1000 kWh of monthly energy consumption.
To estimate EV charging and transformer loading, the model adopted is based on MCS, as in [23]. Therefore, the variables of interest are considered as random values defined by probability density functions.
4. Battery Degradation Cost Model
In this study, we deal with the problem of managing EV charging and discharging in a low-voltage residential distribution system, treated here together as dis/charging. Previous studies that have not considered the battery degradation burden of vehicle owners were subject to inaccurate results, due to degradation effects and the consequent associated costs. Therefore, battery degradation should provide guidelines for optimization applications. In some specific cases, strategies involving V2G can even extend battery life through the use of appropriate optimization schemes [27].
Most studies have suggested that battery capacity fading occurs due to charging cycles, where the magnitude of loss is dependent on the cycle number and depth of discharge (DoD) [28,29]. In summary, the effects of high DoDs intensify volumetric expansion and stress the battery electrodes, resulting in severe changes in structure and volume that cause capacity and power loss [27]. The reasons for this are the constant stripping and re-depositing of the solid electrodes [30].
Usually, battery life cycle data are available in terms of manufacturer’s achievable cycle counts (ACC), which are based on the state of charge (SoC). However, battery usage occurs at various DoD levels, so the use of these types of data are limited to rough estimation of the battery life cycle. To address these issues, [28] have suggested a practical battery degradation cost model to provide PV power for the grid with the aid of V2G. The developed model is based on [27], which proposed a battery degradation model as a function of DoD and temperature to assess the feasibility of V2G in ancillary services, based on the achievable cycle count at a specific DoD. The advantage of this approach is that the data on DoD–ACC cycles are provided by the battery manufacturers, and experiments or other information needed to convert degradation into a monetary cost for battery usage are not required.
In the present study, the proposed application of the battery wear model takes into account not only specifications regarding the battery capacity and maximum accepted power of each vehicle, but also the specific charging rate that determines the amount of power delivered at each time step. It is well-known that, in real-world applications, the power during charging is not constant. As the charging and discharging rates are the decision variables of the proposed optimization problem, the volatility during dis/charging can affect battery wear cost, providing a close relationship between them and the actual degradation cost.
A single charging/discharging cycle per day and a constant battery replacement cost are not suitable for reality, nor is a fixed lifespan. These assumptions are not valid if the battery is cycled more than once per day, as more frequent cycling increases the rate at which the battery cells degrade and hasten the time at which they need to be replaced [29].
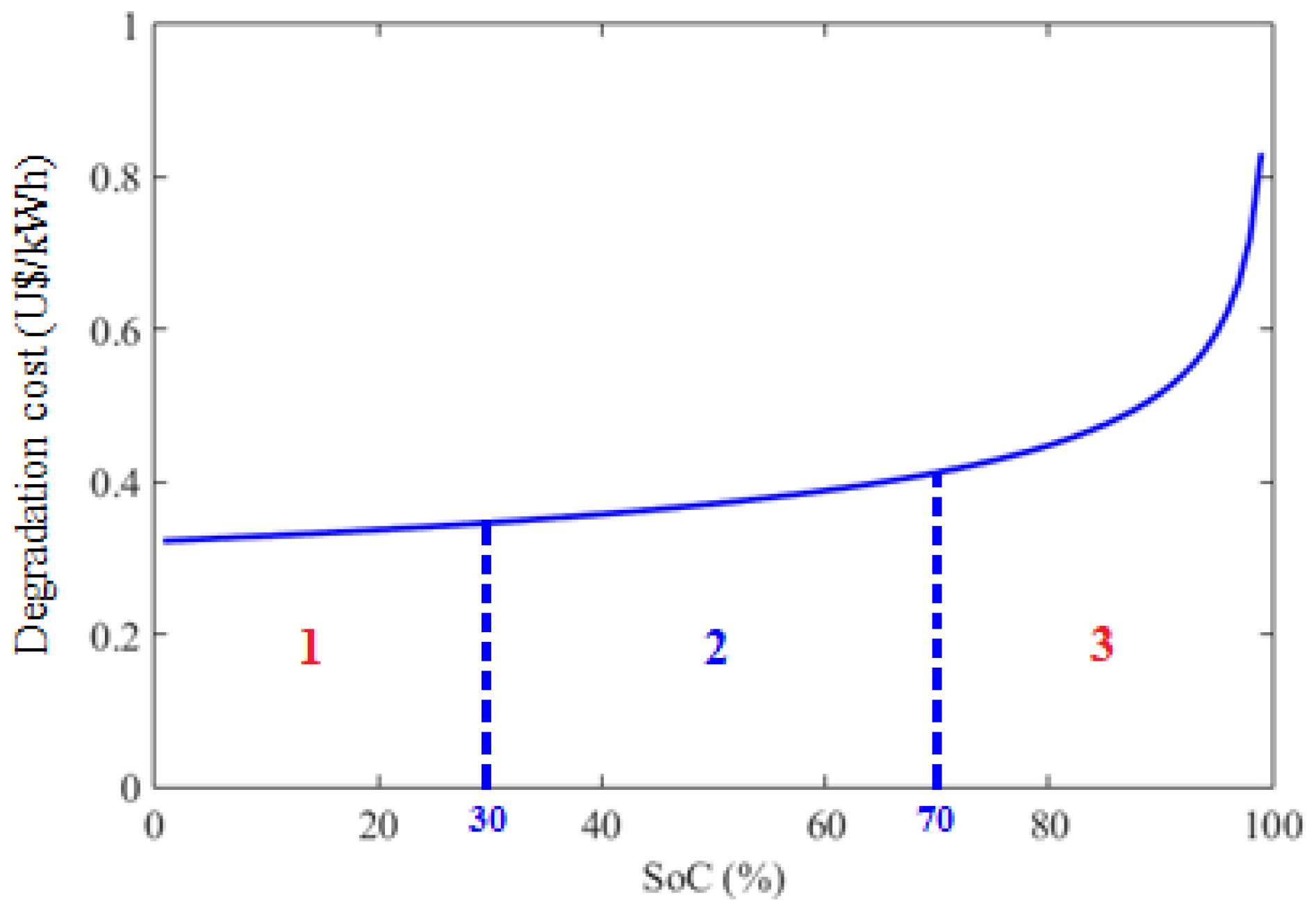
Figure 3 explains the degradation cost evolution, which indicates that the higher it is, the higher the preference for discharging, which tends to be reduced with DoD increment. Conversely, the lower the degradation cost, the higher the preference to start charging.
This strategy aims at preventing deep discharge (i.e., area 1), as well as avoiding cycling at high SoC levels (i.e., area 3), which refer to high degradation costs. Thus, battery degradation cost preference index formulation aims to start charging at SoC levels where the degradation cost is lowest (i.e., area 2), but not across deep discharging area 1. With increased DoD, the battery degradation will increase; thus, if the DoD does not exceed 60%, the battery lifetime may be increased considerably [28]. On the other hand, deep discharge results in several side-effects, such as a risk of internal short-circuiting, which can lead to more serious consequences due to the deposition of materials on the battery electrodes [31].
Furthermore, the proposed method introduces customized battery wear functions, as the wear incurred by cycling the battery may vary depending on the characteristics of each EV model. In addition, the battery degradation models used in previous works consider the degradation curve—translated to a cost or not—as a function of full charging only, thus disregarding the cases where the charging is terminated prior to full charge. Therefore, the present strategy contemplates all possible cases, through the use of a non-linear model updated at each time step.
5. Problem Formulation
Charging can basically be described as the variation in stored energy as a function of time, the duration of which depends on vehicle and charger parameters, as well as the charging strategy according to user preferences. Meanwhile, scheduling can be described as the decision to charge, starting at a certain time, to a specific SoC, in order to be available at a certain time [32]. In this sense, we aimed to design an intelligent algorithm to coordinate dis/charging scheduling between all chargers connected to a distribution transformer.
The concept of an intelligent controller is addressed, with the term intelligent being used to denote an algorithm which is designed to optimize dis/charging scheduling; that is, execution times and prioritization according to user preferences, in order to satisfy charging needs with cost reduction while preserving the distribution transformer power limitations. When considering discharging, battery degradation should be used to address the wear cost of discharging. In this work, a battery degradation cost model is considered as a mechanism to better utilize the power capability of energy transactions between vehicles without compromising distribution transformer loading and battery lifetime.
It is assumed that the arrival time and initial SoC of batteries are collected a priori and the driver informs the system of their needs, in terms of desired final SoC and departure time. In order to charge the EV as soon as possible and the right to charge can be passed to other EVs, the objective function aims to maximize dis/charging rates, without exceeding the distribution transformer power limitations. A formal description of this optimization requires definition of the following parameters and variables, as summarized in Table 3.
As the right to charge is passed on to other EVs, more participants can finish charging in less time. Operational cost reduction is achieved by tariff signals, the analysis of which aims to formulate an index of preference for dis/charging, similarly to that proposed by Yao, Lim, and Tsai [5]. However, the charging strategy depends not only on scheduling but also on the trade-offs of multiple costs. If the influence of battery characteristics on the charging strategy is not fully considered, the charging scheme may be inconsistent with reality, and may even lead to higher battery degradation. In addition to meeting charging needs at reduced cost, the system is designed to reduce battery degradation, based on the presented battery wear cost model.
The objective function aims to maximize individual EV dis/charging rates with respect to three coefficients of the objective function: (1) dis/charging priorities; (2) preference for energy prices; and (3) preference for battery degradation cost. The definition of priorities based on user preferences guarantees the satisfaction of charging requirements prior to departure time in the following day, and provides a fair scheduling preference based on the specific needs of each user. The scheduling is also based on tariff signals, in order to prioritize energy purchases in periods of favorable pricing and incentivizing discharging to other EVs during higher tariffs in favor of cost reduction. Finally, dis/charging priorities based on battery degradation costs serve to increase battery lifetimes.
An optimization scheme is used to coordinate optimal dis/charging scheduling. The problem is addressed with respect to a time window, such that the total available period is evenly distributed in intervals. When an EV is connected, an auxiliary binary variable indicates the charger connection/availability status. Thus, between connection and disconnection time, a binary parameter computes the occupation of each charger.
In addition to the connection status of each charging point, a data acquisition mechanism must compute the maximum permissible charging power for each connected EV. Such properties are conditioned by one of two factors: EV limitations, whose characteristics are related to type, model, and manufacturer; or charging station limitations, whose characteristics are related to the type of charger and available charging level. In practical terms, if the maximum power permitted by the EV is greater than the nominal power of the charging station, the charging power is equal to the latter. Otherwise, the power limitation is determined according to the EV capacity.
Thus, when the auxiliary binary variable indicates the connection of an EV, a data acquisition system computes relevant information, such as battery capacity, SoC, maximum permissible charging and discharging powers, and connection and disconnection times.
The decision variables in the optimization problem are the charging and discharging rates, which should be maximized at each moment of time. They must respect the limitations imposed by each vehicle’s individual maximum power and the distribution transformer for the set of vehicles, in association with the base demand of consumer units.
The variables of the problem can be formulated as follows:
5.1. Dis/Charging Priority
In order to satisfy the dis/charging requirements for each EV connected, the controller prioritizes dis/charging activities, such that the EVs with the greatest needs—in terms of energy and with shortest parking time—have preference for charging. Accordingly, two weights are defined to denote charging and discharging priorities, considering dis/charging capacities and the remaining connection time, according to Equations (2) and (3). Considering the current SoC, dis/charging capacities are obtained according to the amount of SoC required to reach the SoC desired by the user, battery capacity, and maximum admissible power of the EV. The remaining time is given as the decrement between the departure time and current time, as in Equation (4).
The numerator in Equation (2) and the denominator in Equation (3) represent the capacity required to satisfy the SoC desired by the user at the end of parking period; that is, the charging and discharging priorities imply the maximum energy that can be demanded or provided by the EV at each instant of time. Both equations assume that the lower an EV’s SoC, the higher its priority for charging. In contrast, the higher the SoC, the higher priority is given to discharging. In the same way, EVs with shorter parking time have more urgent needs for charging, while those with more available time can discharge their batteries and make energy available to other EVs before charging.
5.2. Preference for Energy Prices
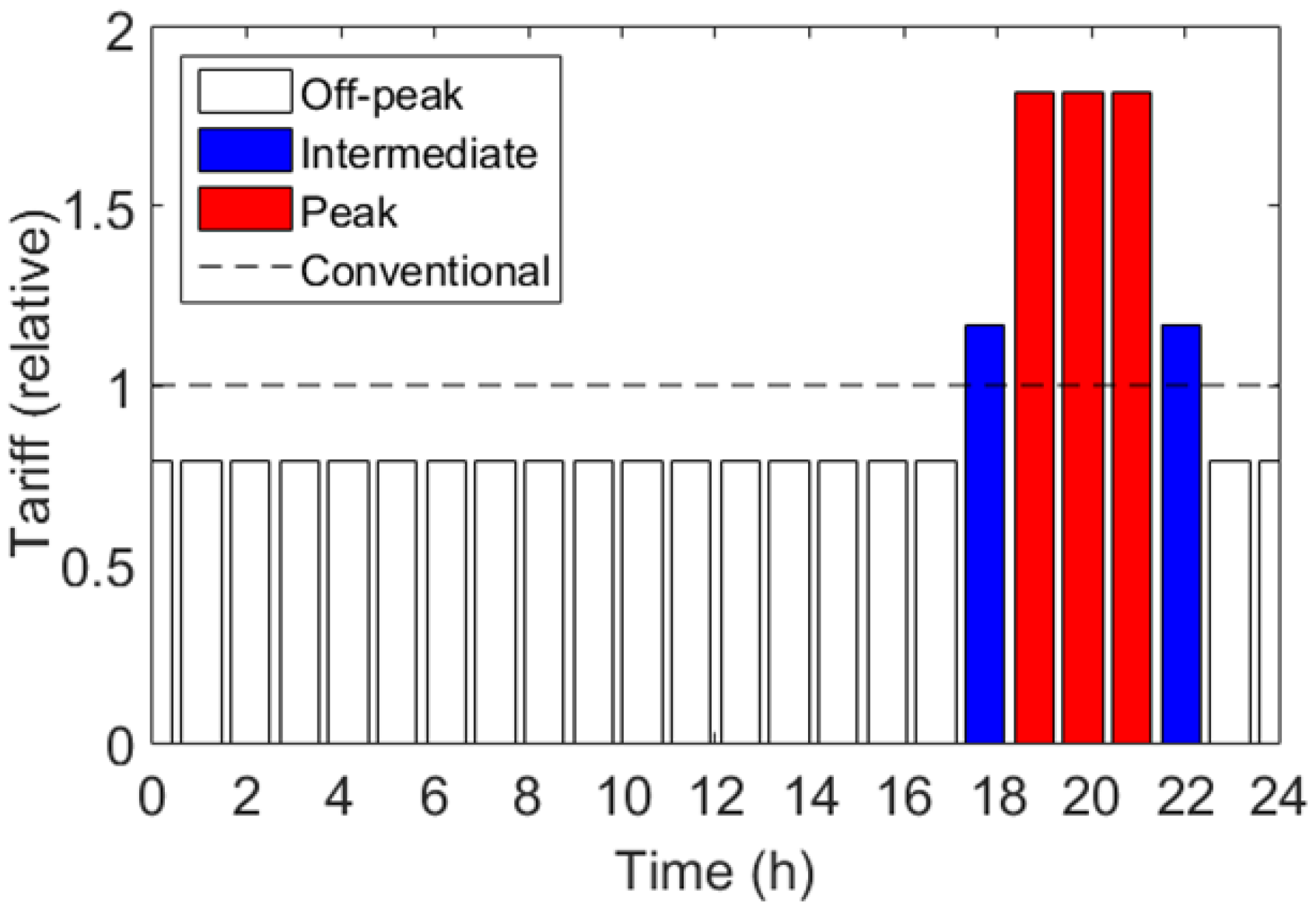
Dictated by economic motivations, in addition to completing all charging requirements in the shortest time possible through prioritization and manipulation of dis/charging rates, the proposed algorithm benefits from the variability of time of use tariff prices, in order to minimize operational costs. Figure 4 shows a time of use tariff current available for Brazilian residential consumers. In general, more EVs should be scheduled to charge during the off-peak tariff, while the use of energy stored on their batteries is encouraged in peak tariff periods.
In this sense, two auxiliary parameters are used to quantify the preference level for charging and discharging the connected EVs as a function of current tariff price, according to Equations (5) and (6), respectively. Such parameters denote the maximum and minimum tariff values, in addition to the current tariff cost, in order to coordinate energy dispatching. While Equation (5) expresses a higher preference value for lower values of the current tariff, motivating charging, Equation (6) presents a higher preference value for more expensive tariff values, prioritizing discharging from the surplus energy stored in EV batteries.
5.3. Preference for Degradation Cost
The energy management system was designed to determine the preference between dis/charging through an auxiliary parameter, called the battery degradation cost preference index. This preference is quantified from the battery degradation cost, based on an EV’s current DoD, as there is an optimal point at which the battery can be cycled to minimize degradation.
A typical Li-ion battery degradation curve based on a wear density function, proposed by [27] and improved by [28], was used to obtain the minimum, maximum, and current battery degradation costs, according to Equations (7) and (8). Consequently, the discharge preference index aims to prioritize discharging until an optimal DoD point is reached, usually associated with a constraint against deep discharge. This specific DoD range indicates the minimum degradation cost and, so, the index gives preference for discharging before starting charging, with respect to the lowest degradation cost.
As the DoD increases, the charging preference becomes more pronounced, as denoted by the charging preference parameter, in order to reduce battery impacts and preserve its lifetime. Thus, when the minimum degradation cost is reached, the charging preference is maximum, effectively reducing costs.
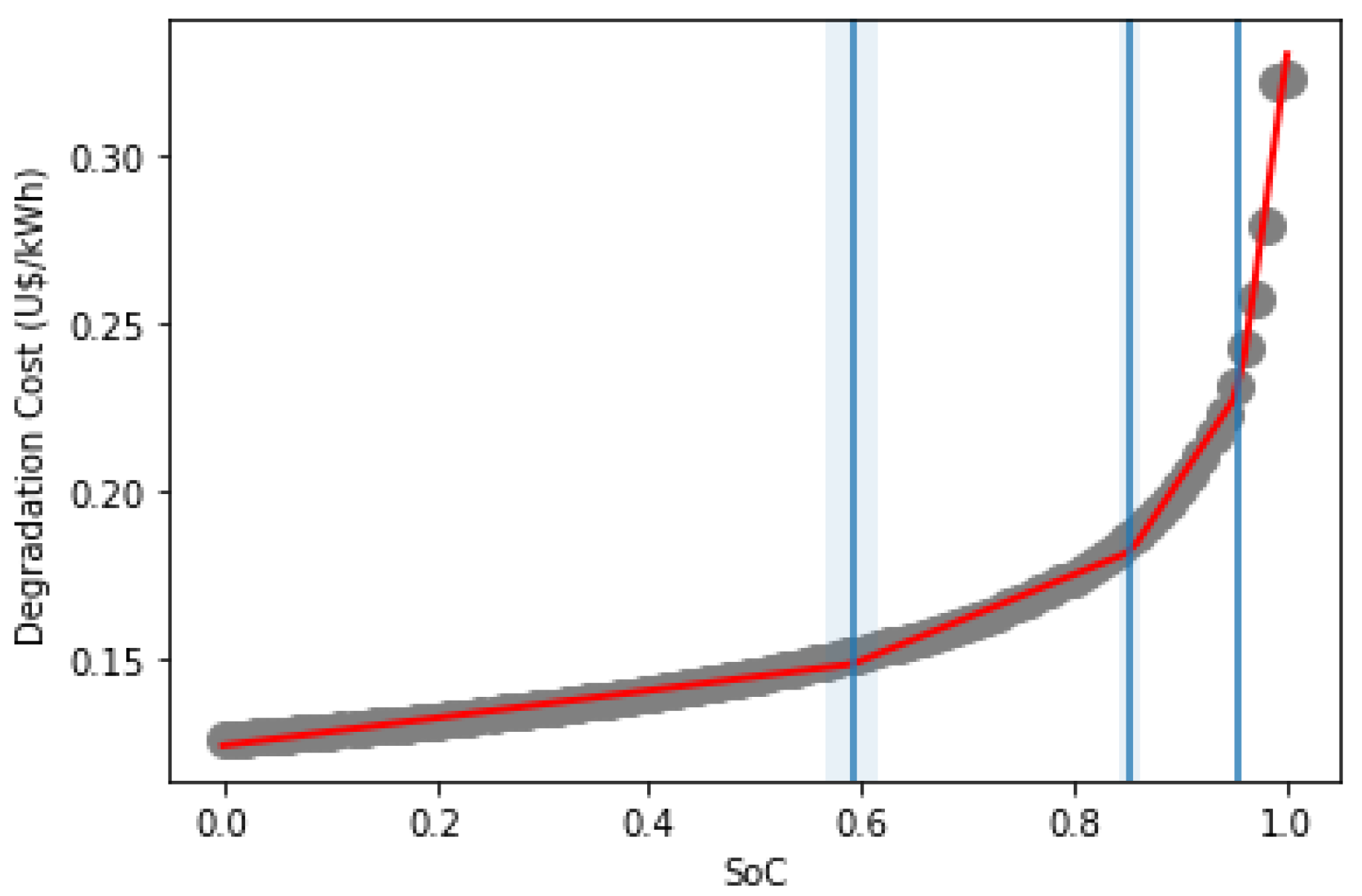
The formulation of Equations (7) and (8), in association with the constraint against deep discharge, prevents charging in extreme SoC values, instead lying close to the optimal point (i.e., near 30% of DoD). As the battery wear cost model is non-linear, piecewise linearization [33] was used as a benchmark. In this way, it was possible to compare the non-linear proposed method with a linear model having four segments, as shown in Figure 5.
5.4. Objective Function
The objective function aims to maximize the charging and discharging rates of connected EVs, according to Equation (9). Individual programming of when each EV will charge or discharge is defined by dis/charging priority indices, as well as preferences for energy prices and battery degradation cost, without violating their respective constraints. This formulation guarantees the satisfaction of charging needs, as the objective function maximizes dis/charging rates for each EV at each instant of time.
The controller maximizes the charging rate, especially during time intervals with high priority, low tariff, and reduced battery degradation cost, such that the EVs can be fully charged as soon as possible and the right to charge can be passed to other connected EVs. This practice follows the priorities calculated at each time step.
The goal of maximizing the individual charging rate of each connected EV at time k is formulated as the product of charging priorities, preference for energy prices for charging, preference for battery degradation cost, and maximum power capacity that each EV can be charged to at the end of the day. The same goes for maximization of the discharging rate, following the respective discharging priorities.
In this sense, due to the fact that the objective function is maximization, the largest result of the multiplication between these coefficients determines when the EV charges or discharges its battery, as well as defining the rate of dis/charge (i.e., power level) imposed on each EV, while respecting the constraints of the optimization problem detailed below.
5.5. Constraints
The optimization problem constraints include: (a) the transformer power limit, (b) EV power, (c) EV SoC, and (d) battery degradation cost. The maximum power requested from the transformer is limited in order to prevent overload, according to Equation (10). Thus, by summing the base demands of dwellings and EVs, resulting from the multiplication between charging rate and maximum permissible power for each EV, the result must be less than or equal to the nominal power of distribution transformer plus discharging power of EVs.
This constraint can be fixed or variable in time, in order to limit the purchasing of energy in periods of higher pricing, depending on the tariff structure addressed. In this case, it was considered a fixed value, as the time of use tariff adopted considers only the amount of energy and not the power. During the scheduling process, dis/charging power must be manipulated without violating the maximum permissible power per EV. A power exchange logic was implemented to prevent the simultaneous charging and discharging of EVs, as in Equations (11) and (12).
The controller must receive information to execute the scheduling. Among these, at connection time, the initial SoC is computed for each EV n, as in Equation (13). The current SoC of each EV connected at any instant of time can be obtained considering the battery SoC in the previous time step, accounting for the increase or decrease of SoC as a result of charging or discharging, as denoted by Equation (14). This is a non-linear SoC function, as it depends on the decision variable (i.e., the dis/charging rate), which, in real-world applications, is not a constant.
The SoC should be restricted within its extreme limits for battery life preservation. Lithium-ion batteries connected in series are prone to overcharging, and deep discharging results in several side-effects, such as capacity degradation and risk of short internal circuit [31]. In this way, the upper and lower limits for the SoC were established, in order to avoid overload and deep discharge, respectively, as indicated by Equation (15).
The charging of any EV must guarantee a minimum requirement for the next trip. The user can establish such a requirement by informing the desired SoC at connection time, together with the desired departure time. Thus, the minimum departure SoC at the end of parking period was defined, according to Equation (16).
The initial degradation cost modeling was calculated as a function of the EV’s maximum permissible power, battery capacity, time sample, and battery DoD. The latter was calculated as a function of the initial SoC, as denoted by Equation (17). The current degradation cost of each connected EV, denoted by Equation (18), can be obtained by considering the incremental degradation cost due to charging, considering the volatility of dis/charging rates.
In this case, the current degradation cost is the total cost, which may change depending on dis/charging rates, which consequently leads to changes in SoC. This formulation ensures that the total degradation cost is reduced as the DoD increases, until it reaches the constraint that prevents deep discharge.
The following mixed integer non-linearly constrained formulation represents the scheduling algorithm:
6. Simulation Results
In order to test the effectiveness of the proposed charging prioritization strategy, some assumptions were made for optimization. We adopted a discretization of 5 min, such that there were 288 possibilities for scheduling during the day and a time sample of 0.083 h. A charging efficiency equivalent to 85% was considered for both charging and discharging. The minimum and maximum SoC were defined as 30% and 100%, in order to prevent deep discharging and overcharging, respectively.
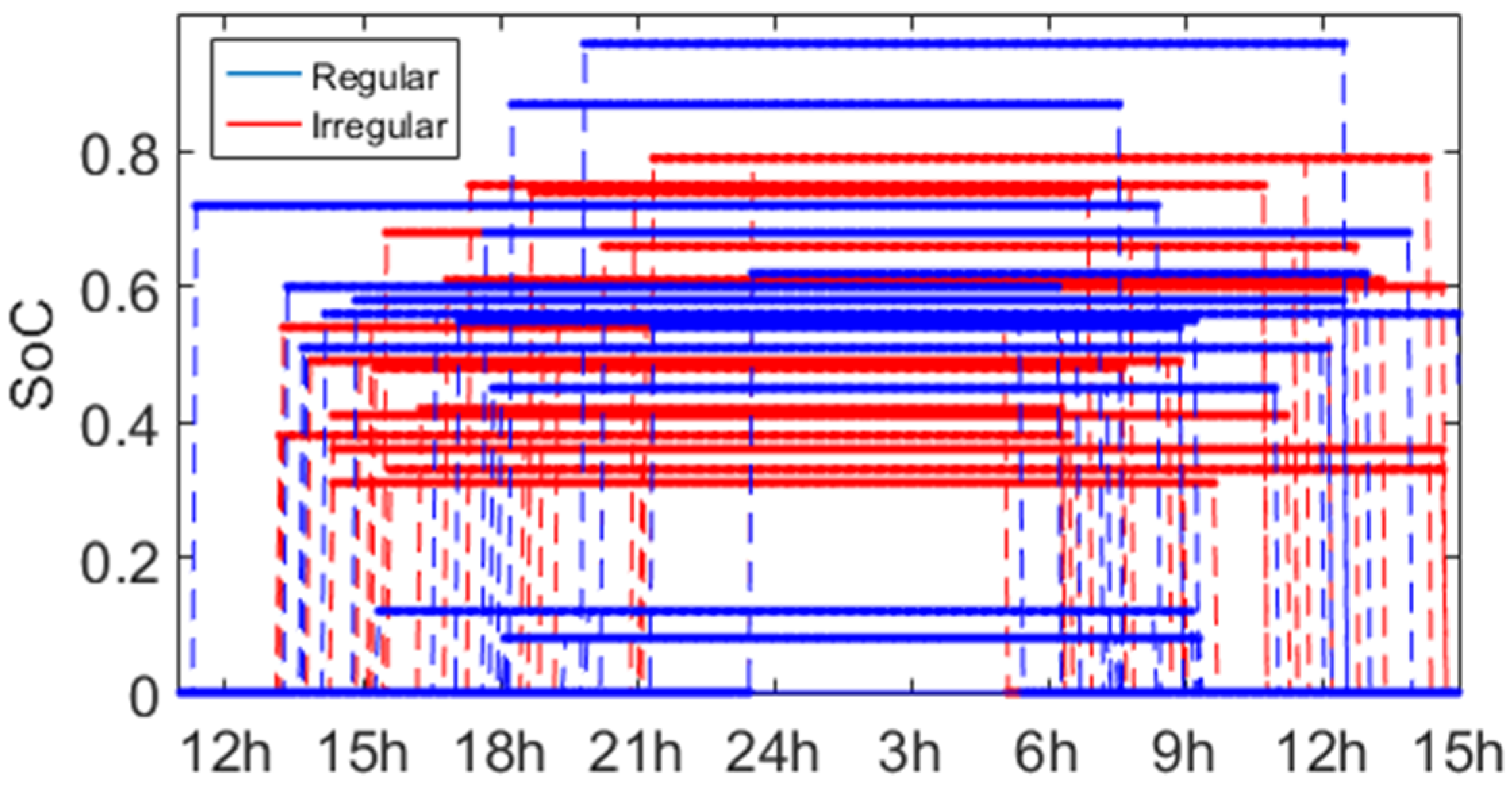
The segregation of regular and irregular users was carried out to comprehend both deterministic and random cases for initial connection time, disconnection time, and EV battery level (i.e., SoC). In Figure 6, it is possible to observe the time window in which each EV can be programmed to execute dis/charging, as well as the respective SoC. This indicates the opportunity to apply the proposed optimal strategy, as most EVs remain parked for a longer time than needed to complete charging.
We considered 50 vehicles, as this is the average number of consumer units connected to the most common transformer of a given distributor located in southern Brazil, indicating one EV per household.
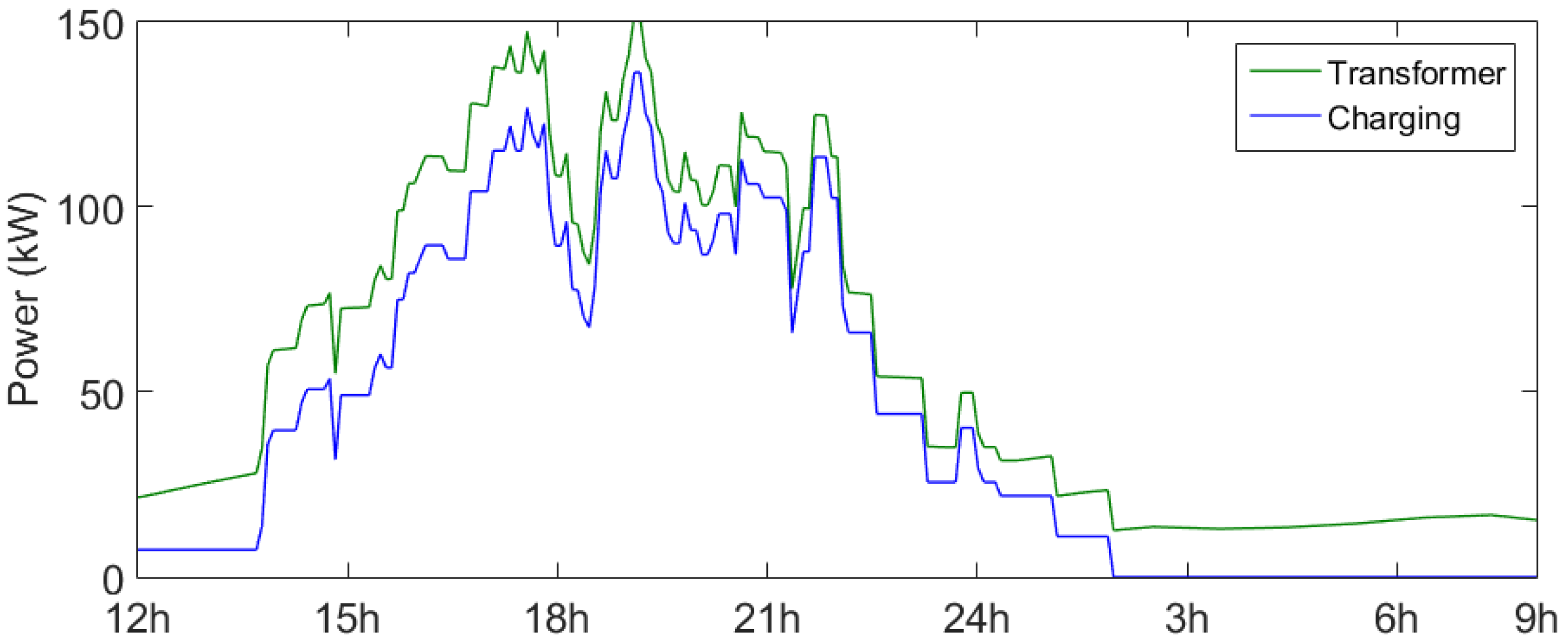
Based on the direct charging approach, Figure 7 shows the power profile for complete charging with maximum power (ranging from 3.7 for hybrids up to 11 kW for BEVs, depending on the EV model), in addition to the 75 kVA transformer demand. It is important to note that this corresponds to a direct charging strategy, in which charging begins at the moment of connection.
Although the base demand of 50 consumers connected to the transformer is relatively low, compared to EV demand, as they come from typical curves based on average values, the demand of the EVs considerably exceeded the nominal power of 75 kW, considering a unitary power factor. In this case, the transformer load resulted in a peak greater than 150 kW near 7 p.m., clearly indicating an overload situation.
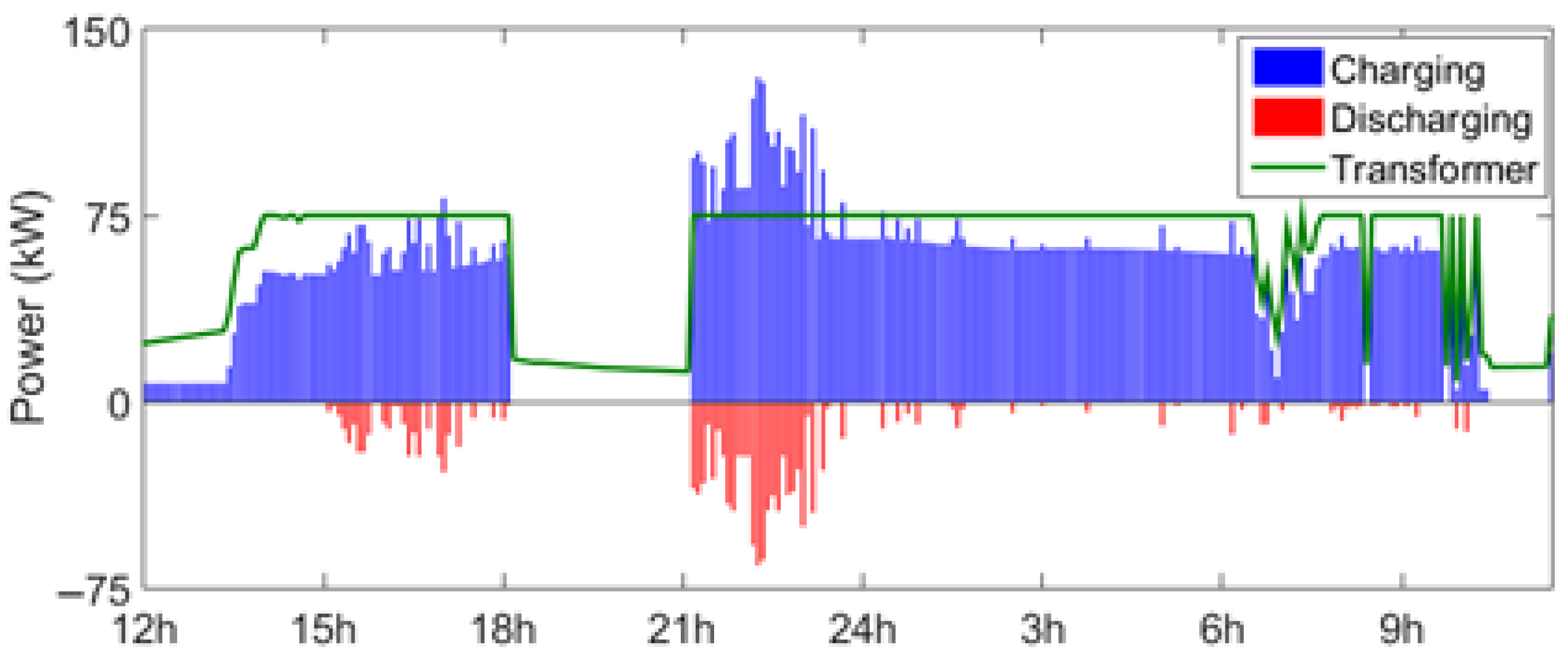
As a solution, the proposed optimization algorithm was implemented in the AMPL language, the results of which are presented in Figure 8. The problem was solved using an MINOS solver available on the NEOS server [34] by a globally convergent linearly constrained Lagrangian method, which is basically a sequence of major iterations that solves a linearly constrained sub-problem. The sub-problem objective was an augmented Lagrangian, and the sub-problem constraints were linearizations of the non-linear constraints at the current point [35].
The gains of this optimization technique—designed with respect to the objective function coefficients—were three-fold. All charging requests were completed before the next-day departure time, ordered by prioritization index. Charging only occurred during the off-peak tariff, in order to reduce charging costs. Finally, the degradation costs were reduced by discharging before charging up to the optimal point, such that degradation was reduced. The weight of all three indices are the same, making the optimization balanced between them.
As discharging was limited behind the transformer, it did not occur during the off-peak tariff; selling energy to the grid is beyond the scope of this paper. Discharging was used as a mechanism to provide additional power to other EVs without exceeding the transformer power limitations.
7. Discussion
The direct charging strategy was used as a reference to demonstrate the effectiveness of proposed method, as shown in Table 4. The objective function coefficients were evaluated in order to illustrate the dis/charging prioritization behavior, energy price preference, and battery degradation cost preference indices. From the results, the importance of considering all three proposed indices can be observed.
The amount of energy consumed over 24 h remained practically the same for all cases, as would be expected, given that the household consumption and EV demands remained unchanged. However, the energy purchase price was reduced, due to the effectiveness of using the tariff preference index. This situation was clearer with the proposed method, related to higher economy due to off-peak charging. However, the best results for battery degradation cost reduction did not occur when associated with the tariff preference index, as the degradation index received a higher weight when only two indices were considered, instead of all three, in the proposed method. When ignoring tariff prices, EVs discharged at higher rates, increasing the DoD even more before charging and, thus, reducing degradation costs; however, they charged faster during peak tariff prices, with higher charging rates, increasing energy purchase cost.
Even without considering the battery degradation index, a reduction in degradation costs was achieved by discharging energy between EVs to support transformer power limitations, increasing the DoD of some vehicles and, thus, decreasing degradation. However, the result was not as efficient as that achieved by the proposed method. This outcome can lead to more consumers having confidence in accepting discharging once the strategy is degradation-conscious. A small performance loss was verified with piecewise linearization, but the difference in iteration number led to no significant difference in convergence time.
A cost analysis between the implementation of this strategy and replacing the distribution transformer with a higher capacity one was not addressed, as the problem of the increased grid power draw would not be solved by replacing the transformer, in addition to the economy of the energy purchase or battery degradation cost reduction achieved by the proposed method.
8. Conclusions
In this study, we presented the model for the evaluation of the EV parking pattern and energy requirements, which uses user preferences and EV characteristics to establish guidelines for the optimal scheduling of dis/charging. In addition to meeting charging needs at the lowest cost before the required next-day departure time, the battery degradation cost is reduced. Furthermore, overloading and consequent premature replacement of the distribution transformer can be prevented. Therefore, the perspective presented herein aims to benefit network operators and users concomitantly, with special attention paid to battery degradation.
The evolution of optimization algorithms and the increase in communication between power system elements allow EV dis/charging to be controlled, providing various benefits to both network operators and consumers, in order to reduce the technical disadvantages of simultaneous charging and to take advantage of discharging capabilities. In addition to the technical benefits, economic advantages related to the variability of time of use tariff prices can be obtained through effective mathematical modeling of the variables that comprise charging optimization schemes.
When discharging, EVs may be prone to increased battery degradation if not properly managed. In this regard, based on modeling and evaluation of the parking pattern and energy requirements of EVs in a low-voltage residential distribution system, a diagnosis of user preferences and energy consumption characteristics was carried out, in order to establish guidelines for the optimal scheduling of EV dis/charging. The designed algorithm can schedule and prioritize dis/charging according to user preferences, in order to satisfy their charging requirements at reduced cost, while preserving battery lifetime and distribution transformer power limits.
The prioritization scheme was shown to be effective, as all charging requirements were met prior to the departure times, according to user preferences. We observed considerable cost reductions, both in energy purchase price and battery degradation costs, when using the proposed method. EV discharging serves as a power support beyond the distribution transformer capacity, such that more power can be allocated for charging other EVs without compromising the lifetime of the equipment due to overcharging. Furthermore, with discharging support, charging requirements can be completed in less time, as there is more power available for charging, even though some vehicles are discharged prior to charging in order to increase battery lifetime.
The strategy presented in this research was applied to the deterministic estimation of dwelling and EV energy consumption, in which charging scheduling is dependent on this information. The objective was successfully achieved by effectively reducing costs for a day-ahead situation, while also proving that is possible to reduce battery degradation costs by discharging energy to other EVs before charging. However, as future work for real-time operations, another timeframe optimization method must be designed to update the scheduling dynamically. In this way, the stochastic nature of loads and uncertainty may be addressed.
In addition, special attention to cable limitations should be considered, as the EV power draw may exceed the maximum transformer load, leading to the possibility of exceeding the maximum admissible current of cables, as well as phase unbalancing in the case of a three-phase transformer.
Author Contributions
Conceptualization, J.P.S. and A.R.A.; methodology, J.P.S.; software, J.P.S.; validation, J.P.S., J.M.G. and J.C.V.; formal analysis, A.R.A.; investigation, J.P.S.; resources, J.P.S.; data curation, J.P.S.; writing—original draft preparation, J.P.S.; writing—review and editing, A.R.A.; visualization, J.P.S.; supervision, A.R.A., J.C.V. and J.M.G.; project administration, A.R.A.; funding acquisition, A.R.A. All authors have read and agreed to the published version of the manuscript.
Funding
The authors thank the technical and financial support from Companhia Estadual de Energia Elétrica and Grupo Equatorial Energia (R&D Program of ANEEL through the project CEEE/EQUATORIAL/UFSM n° 5000004061), Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq), Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES/PROEX—Finance Code 001), and Universidade Federal de Santa Maria (UFSM), Brazilian Institutions.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- IEA, International Energy Agency. Global EV Outlook 2020; IEA: Paris, France, 2020. [Google Scholar]
- European Court of Auditors. Infrastructure for Charging Electric Vehicles: More Charging Stations but Uneven Deployment Makes Travel across the EU Complicated; European Court of Auditors: Luxembourg, 2021; pp. 8–10. [Google Scholar]
- INL, Idaho National Laboratory. Plugged in: How Americans Charge Their Electric Vehicles; INL: Idaho Falls, ID, USA, 2015; pp. 1–24.
- Amjad, M.; Ahmad, A.; Rehmani, M.H.; Umer, T. A review of EVs charging: From the perspective of energy optimization, optimization approaches, and charging techniques. Transp. Res. Part D 2018, 62, 386–417. [Google Scholar] [CrossRef]
- Yao, L.; Lim, W.H.; Tsai, T.S. A Real-Time Charging Scheme for Demand Response in Electric Vehicle Parking Station. IEEE Trans. Smart Grid 2017, 8, 52–62. [Google Scholar] [CrossRef]
- Xu, Z.; Hua, Z.; Song, Y.; Zhao, W.; Zhang, Y. Coordination of PEVs charging across multiple aggregators. Appl. Energy 2014, 136, 582–589. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Le, L.B. Joint Optimization of Electric Vehicle and Home Energy Scheduling Considering User Comfort Preference. IEEE Trans. Smart Grid 2014, 5, 188–199. [Google Scholar] [CrossRef]
- Meng, J.; Mua, Y.; Jia, H.; Wub, J.; Yu, X.; Qua, B. Dynamic frequency response from electric vehicles considering travelling behavior in the Great Britain power system. Appl. Energy 2016, 162, 966–979. [Google Scholar] [CrossRef]
- Babic, J.; Carvalho, A.; Ketter, W.; Podobnik, V. Evaluating Policies for Parking Lots Handling Electric Vehicles. IEEE Access 2017, 6, 944–961. [Google Scholar] [CrossRef]
- Schoch, J.; Gaerttner, J.; Schuller, A.; Setzer, T. Enhancing electric vehicle sustainability through battery life optimal charging. Transp. Res. Part B Methodol. 2018, 112, 1–18. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, J.; Zheng, T.; Litvinov, E.; Kirschen, D. Factoring the Cycle Aging Cost of Batteries Participating in Electricity Markets. IEEE Trans. Power Syst. 2018, 33, 2248–2259. [Google Scholar] [CrossRef] [Green Version]
- Dogan, A.; Alci, M. Heuristic Optimization of EV Charging Schedule Considering Battery Degradation Cost. Elektron. ElektroTech. 2018, 24, 15–20. [Google Scholar] [CrossRef] [Green Version]
- Abdelaal, G.; Gilany, M.I.; Elshahed, M.; Sharaf, H.M. Integration of Electric Vehicles in Home Energy Management Considering Urgent Charging and Battery Degradation. IEEE Access 2021, 9, 47713–47730. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, J.; Huang, Z.; Huang, W. Simultaneous charging station location-routing problem for electric vehicles: Effect of nonlinear partial charging and battery degradation. Energy 2022, 250, 123724. [Google Scholar] [CrossRef]
- Vadi, S.; Bayindir, R.; Colak, A.M.; Hossain, E. A Review on Communication Standards and Charging Topologies of V2G and V2H Operation Strategies. Energies 2019, 12, 3748–3775. [Google Scholar] [CrossRef] [Green Version]
- Chynoweth, J.; Chung, C.; Qiu, C.; Chu, P.; Gadh, R. Smart electric vehicle charging infrastructure overview. In Proceedings of the 2014 IEEE PES Innovative Smart Grid Technologies (ISGT), Istanbul, Turkey, 12–15 October 2014. [Google Scholar]
- Paterakis, N.G.; Gibescu, M. A methodology to generate power profiles of electric vehicle parking lots under different operational strategies. Appl. Energy 2016, 173, 111–123. [Google Scholar] [CrossRef] [Green Version]
- Franco, J.F.; Rider, M.J.; Romero, R. A Mixed-Integer Linear Programming Model for the Electric Vehicle Charging Coordination Problem in Unbalanced Electrical Distribution Systems. IEEE Trans. Smart Grid 2015, 6, 2200–2210. [Google Scholar] [CrossRef]
- Bonges, A.H.; Lusk, A.C. Addressing electric vehicle (EV) sales and range anxiety through parking layout, policy and regulation. Transp. Res. Part A Policy Pract. 2016, 83, 63–73. [Google Scholar] [CrossRef] [Green Version]
- Al-karakchi, A.A.A.; Lacey, G.; Putrus, G. A Method of Electric Vehicle Charging to Improve Battery Life. In Proceedings of the 50th International Universities Power Engineering Conference (UPEC), Stroke-On-Trent, UK, 1–4 September 2015. [Google Scholar]
- Nefedov, E.; Sierla, S.; Vyatkin, V. Internet of Energy Approach for Sustainable Use of Electric Vehicles as Energy Storage of Prosumer Buildings. Energies 2018, 11, 2165–2173. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Li, Y.; Cai, L. Intelligent parking garage EV charging scheduling considering battery charging characteristic. IEEE Trans. Ind. Electron. 2018, 65, 2806–2816. [Google Scholar] [CrossRef]
- Sausen, J.P.; Abaide, A.R.; Adeyanju, O.M.; Paixão, J.L. EV Demand Forecasting Model Based on Travel Survey: A Brazilian Case Study. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Gramado, Brazil, 15–18 September 2019. [Google Scholar]
- CNT, Confederação Nacional do Transporte; NTU, Associação Nacional das Empresas de Transportes Urbanos. Urban Population Mobility Survey 2017; CNT/NTU: Brasília, Brazil, 2017. [Google Scholar]
- Kuran, M.S.; Iannone, L.; Viana, A.C. A smart parking lot management system for scheduling the recharging of electric vehicles. IEEE Trans. Smart Grid 2015, 6, 2942–2953. [Google Scholar] [CrossRef]
- Turan, M.T.; Ates, Y.; Erdnic, O.; Gokalp, E.; Catalão, J.P.S. Electrical Power and Energy Systems Effect of electric vehicle parking lots equipped with roof mounted photovoltaic panels on the distribution network. Electr. Power Energy Syst. 2019, 109, 283–289. [Google Scholar] [CrossRef]
- Zhou, C.; Qian, K.; Allan, M.; Zhou, W. Modeling of the Cost of EV Battery Wear due to V2G Application in Power Systems. IEEE Trans. Energy Convers. 2011, 26, 1041–1050. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Aki, H. A practical battery wear model for electric vehicle charging applications. Appl. Energy 2014, 113, 1100–1108. [Google Scholar] [CrossRef]
- Schmalstieg, J.; Käbitz, S.; Ecker, M.; Sauer, D.U. A holistic aging model for Li(NiMnCo)O2 based 18650 lithium-ion batteries. J. Power Sources 2014, 257, 325–334. [Google Scholar] [CrossRef]
- Ali Ahmadian, A.; Sedghi, M.; Elkamel, A.; Fowler, M.; Golkar, M.A. Plug-in electric vehicle batteries degradation modeling for smart grid studies: Review, assessment and conceptual framework. Renew. Sustain. Energy Rev. 2018, 81, 2609–2624. [Google Scholar] [CrossRef]
- Guo, R.; Lu, L.; Ouyang, M.; Feng, X. Mechanism of the entire overdischarge process and overdischarge-induced internal short circuit in lithium-ion batteries. Nat. Sci. Rep. 2016, 6, 30248. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daina, N.; Sivakumar, A.; Polak, J.W. Electric vehicle charging choices: Modelling and implications for smart charging services. Transp. Res. Part C 2017, 81, 36–56. [Google Scholar] [CrossRef]
- Pilgrim, C. Piecewise-regression (aka segmented regression) in Python. J. Open Source Softw. 2021, 6, 3859. [Google Scholar] [CrossRef]
- Czyzyk, J.; Mesnier, M.P.; Moré, J.J. The NEOS Server. IEEE J. Comp. Sci. Eng. 1998, 5, 68–75. [Google Scholar] [CrossRef]
- Friedlander, M.P.; Saunders, M.A. A globally convergent linearly constrained lagrangian method for nonlinear optimization. SIAM J. Optim. 2005, 15, 863–897. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Trip occurrence time probabilities [23].
Figure 1.
Trip occurrence time probabilities [23].

Figure 2.
(a) Residential monthly typical consumption curves; and (b) transformer base load.

Figure 3.
Battery degradation cost model [28].
Figure 3.
Battery degradation cost model [28].

Figure 4.
Time of use tariff.

Figure 5.
Piecewise linearization of battery degradation cost.

Figure 6.
Initial SoC and available time for scheduling.

Figure 7.
Direct charging power profile.

Figure 8.
Scheduled dis/charging power profile.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Mobility pattern information [23].
Table 1.
Mobility pattern information [23].
| Reason | PDF (%) | Average Distance (km) | Average Duration (min) |
|---|---|---|---|
| Work | 56.69 | 26.60 | 37.70 |
| Shopping | 14.54 | 16.80 | 31.10 |
| Study | 10.30 | 19.00 | 33.40 |
| Healthcare | 9.55 | 22.80 | 38.70 |
| Others | 8.92 | 16.80 | 31.10 |
Table 2.
Residential typical consumption [23].
Table 2.
Residential typical consumption [23].
| Energy (kWh/month) | PDF (%) | CDF (%) | Random Numbers From–To |
|---|---|---|---|
| 0–100 | 23.69 | 23.69 | 0.0000–0.2368 |
| 101–220 | 47.44 | 71.13 | 0.2369–0.7112 |
| 221–500 | 25.91 | 97.04 | 0.7113–0.9704 |
| 501–1000 | 2.56 | 99.60 | 0.9705–0.9959 |
| >1000 | 0.40 | 100.00 | 0.9960–0.9999 |
Table 3.
Notation for the optimization problem.
| Sets: | |
| J | set of time intervals ) |
| N | set of vehicles |
| Parameters: | |
| time sample | |
| arrival time of vehicle n | |
| departure time of vehicle n | |
| maximum admissible charging power by vehicle n | |
| maximum admissible discharging power by vehicle n | |
| battery capacity of vehicle n | |
| initial battery SoC of vehicle n | |
| final desired battery SoC of vehicle n | |
| maximum SoC of vehicle n | |
| minimum SoC of vehicle n | |
| dis/charging efficiency | |
| current tariff price in time step j | |
| maximum energy tariff price | |
| minimum energy tariff price | |
| transformer power limit | |
| base demand of consumer units | |
| Variables: | |
| binary variable, taking a value of 1 if vehicle n is connected in time step j and 0 otherwise | |
| binary variable, taking a value of 1 if vehicle n is charging in time step j and 0 if discharging | |
| charging rate of vehicle n in time step j | |
| discharging rate of vehicle n in time step j | |
| remaining connection time of vehicle n in time step j | |
| current battery SoC of vehicle n in time step j | |
| current battery degradation cost of vehicle n in time step j | |
| maximum battery degradation cost of vehicle n | |
| minimum battery degradation cost of vehicle n | |
| charging priority index of vehicle n in time step j | |
| discharging priority index of vehicle n in time step j | |
| tariff preference index for charging vehicle n in time step j | |
| tariff preference index for discharging vehicle n in time step j | |
| battery degradation cost preference index for charging vehicle n in time step j | |
| battery degradation cost preference index for discharging vehicle n in time step j |
Table 4.
Results comparison.
| Direct Charging | Proposed Method | Piecewise Linearization | w/o Degradation | w/o Tariff | w/o Tariff and Degradation | |
|---|---|---|---|---|---|---|
| Energy (kWh) | 1422.16 | 1424.20 | 1419.92 | 1425.07 | 1418.99 | 1422.20 |
| - | 0.14% | −0.16% | 0.20% | −0.22% | 0.00% | |
| Energy Price (USD) | $935.45 | $782.51 | $826.29 | $823.58 | $881.06 | $879.75 |
| - | −16.35% | −11.67% | −11.96% | −5.81% | −5.95% | |
| Degradation Cost | $7.42100 | $7.02747 | $7.15404 | $7.28260 | $6.87264 | $7.28626 |
| (USD/kWh) | - | −5.30% | −3.60% | −1.86% | −7.39% | −1.82% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sausen, J.P.; Abaide, A.R.; Vasquez, J.C.; Guerrero, J.M. Battery-Conscious, Economic, and Prioritization-Based Electric Vehicle Residential Scheduling. Energies 2022, 15, 3714. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103714
AMA Style
Sausen JP, Abaide AR, Vasquez JC, Guerrero JM. Battery-Conscious, Economic, and Prioritization-Based Electric Vehicle Residential Scheduling. Energies. 2022; 15(10):3714. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103714
Chicago/Turabian StyleSausen, Jordan P., Alzenira R. Abaide, Juan C. Vasquez, and Josep M. Guerrero. 2022. "Battery-Conscious, Economic, and Prioritization-Based Electric Vehicle Residential Scheduling" Energies 15, no. 10: 3714. https://0-doi-org.brum.beds.ac.uk/10.3390/en15103714
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.