Application of Coordinated SOFC and SMES Robust Control for Stabilizing Tie-Line Power

Abstract
:
1. Introduction
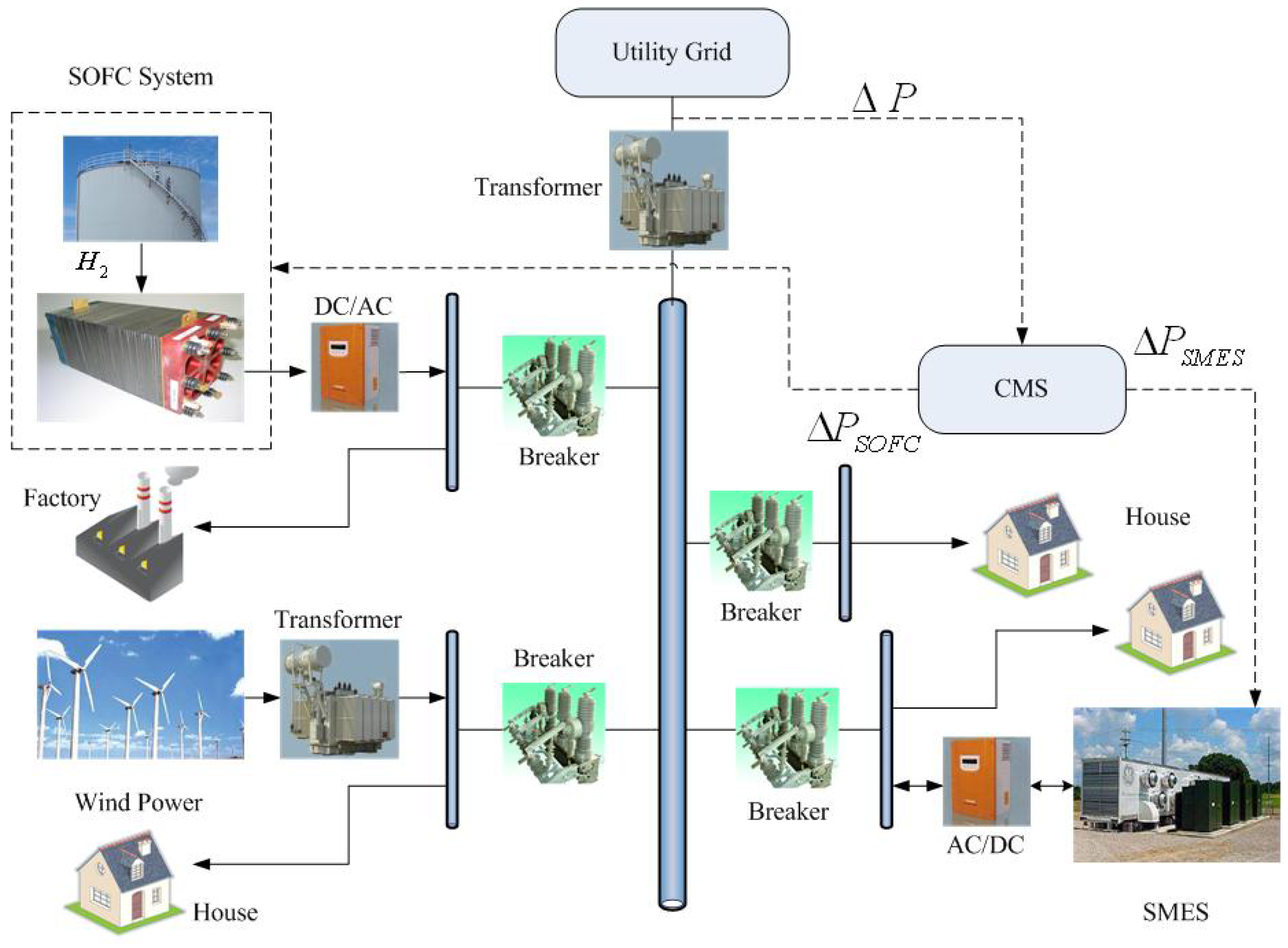
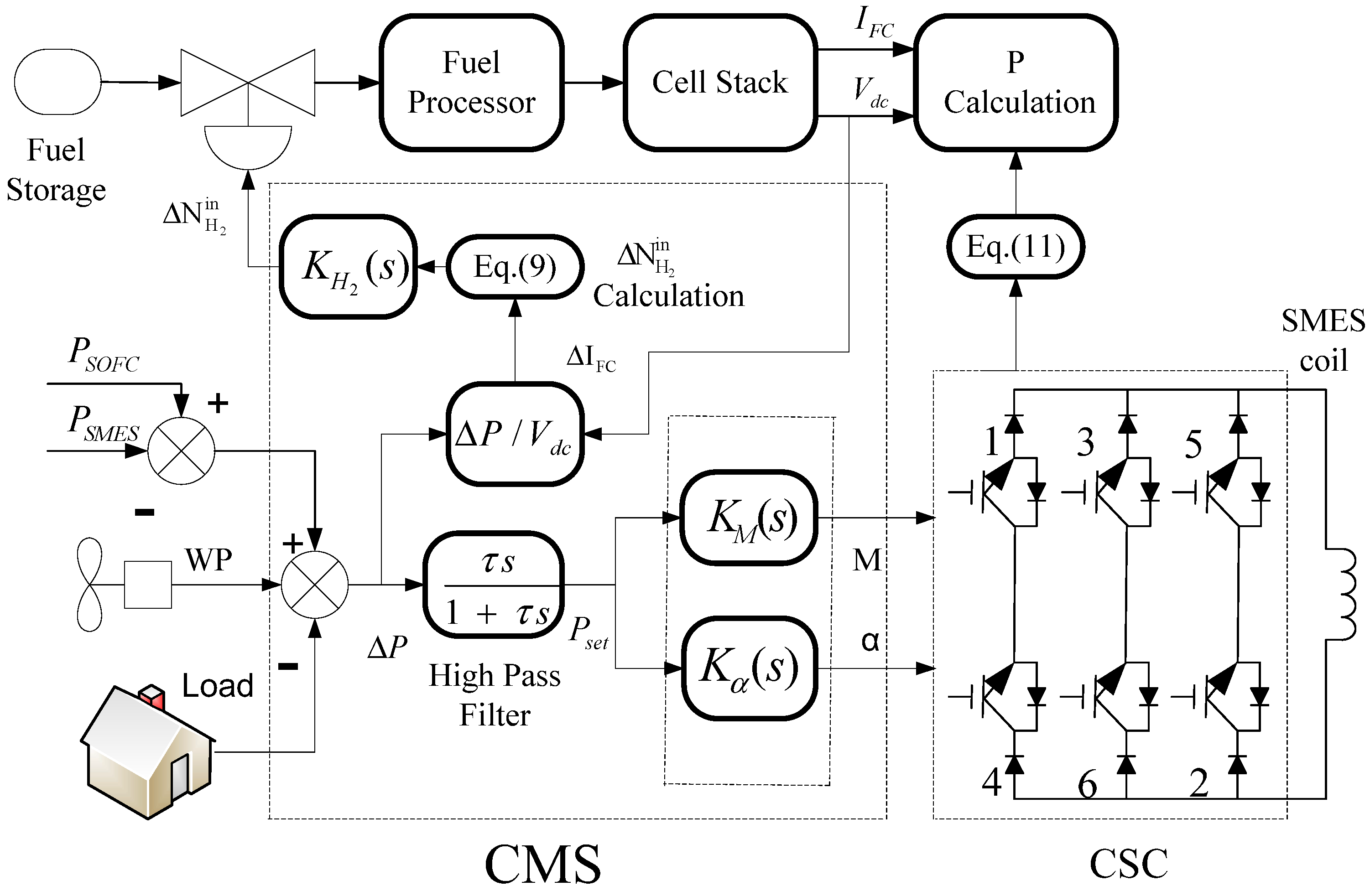
2. Microgrid Model
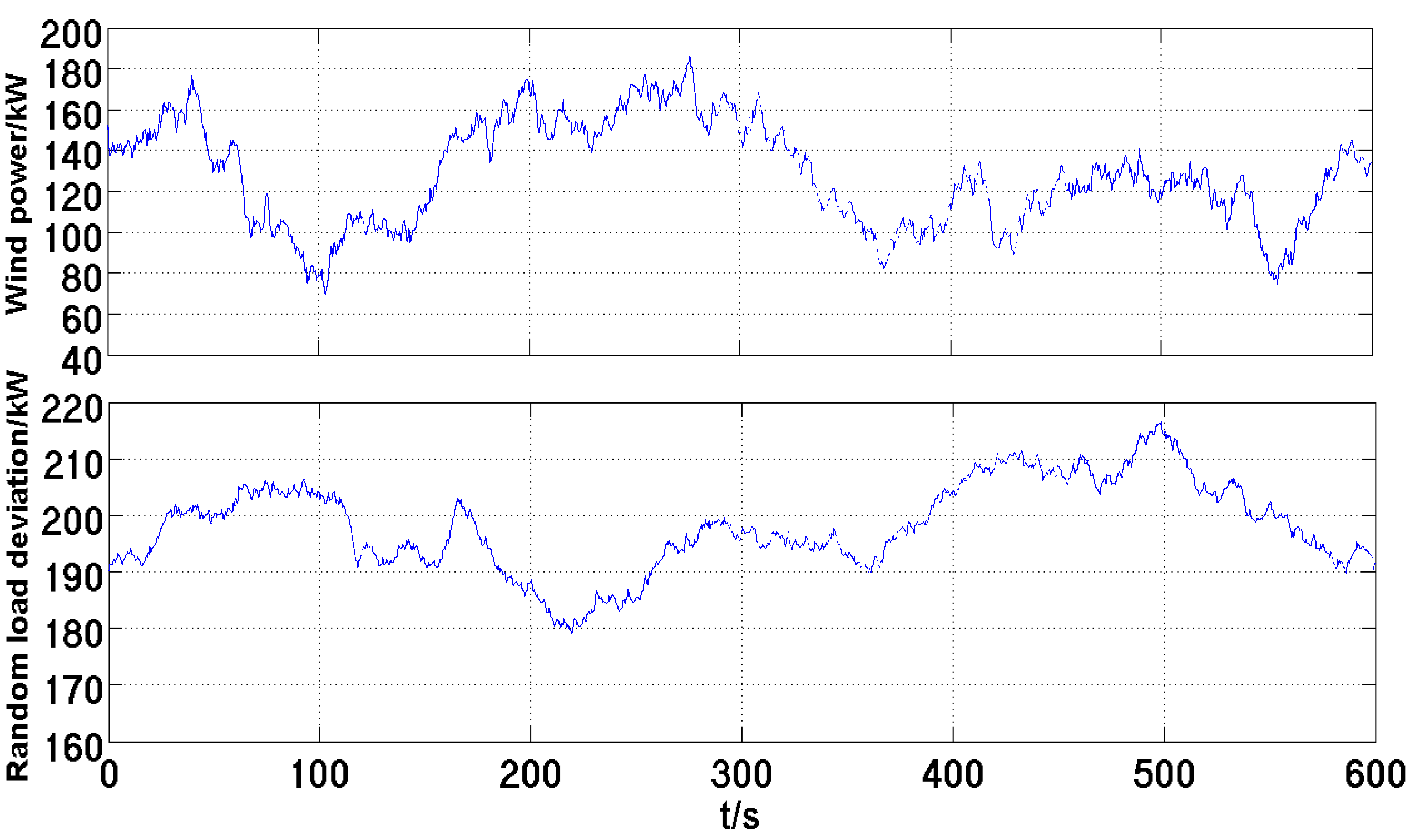
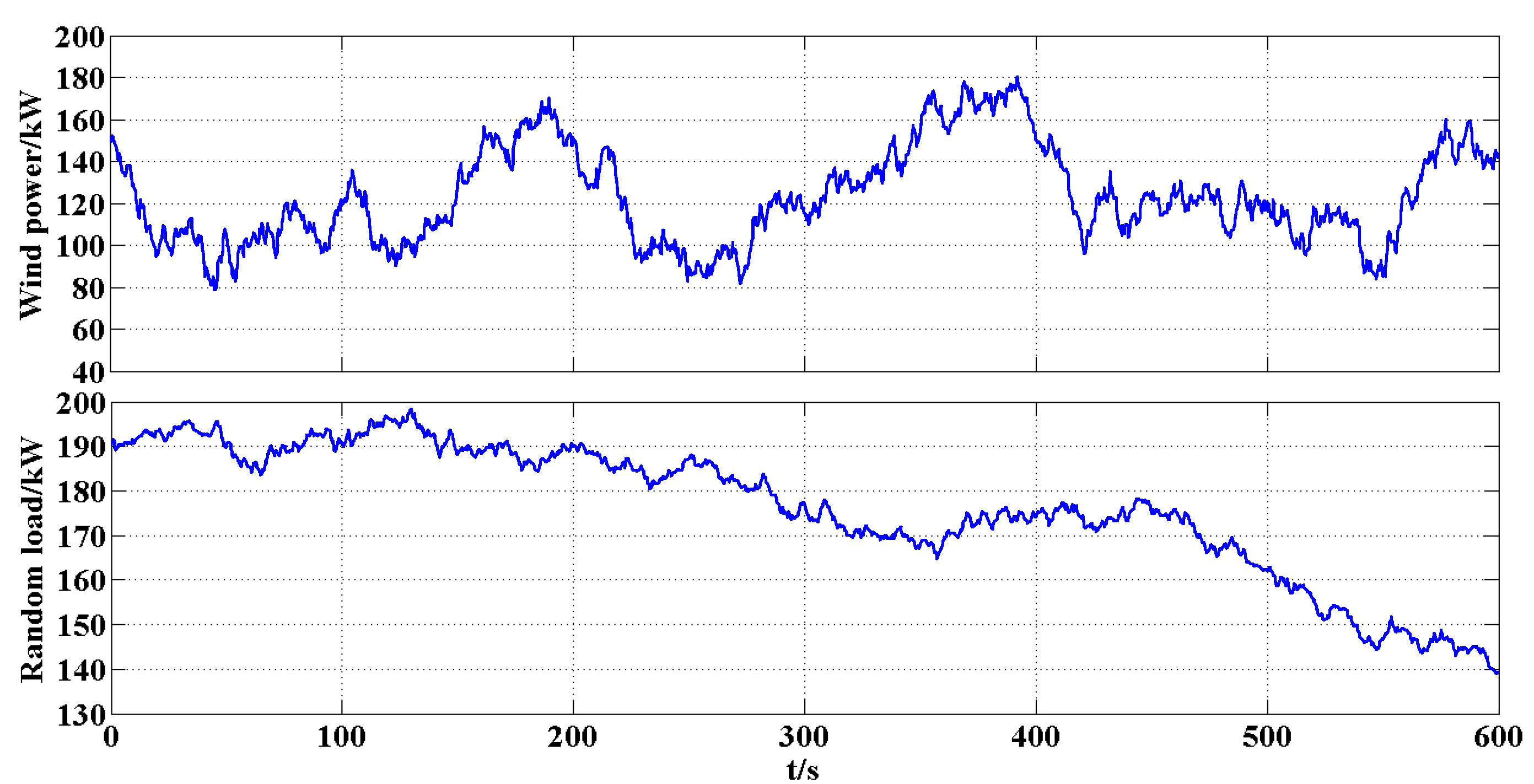
2.1. Wind Power and Load Models


2.2. SOFC Models
2.3. SMES Models
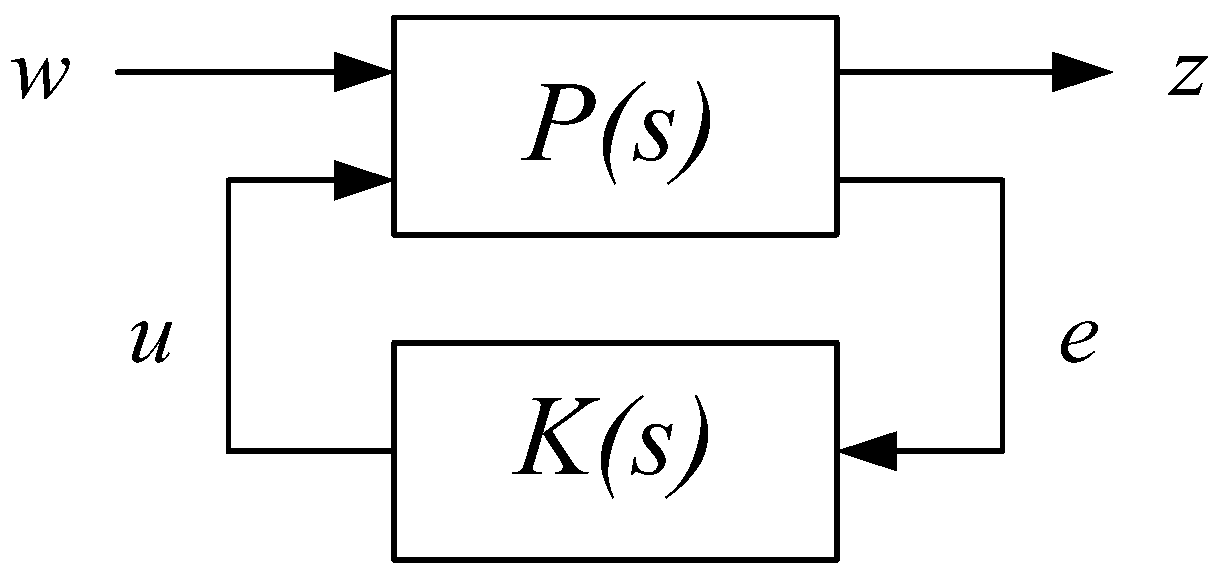
3. H∞ Optimal Control
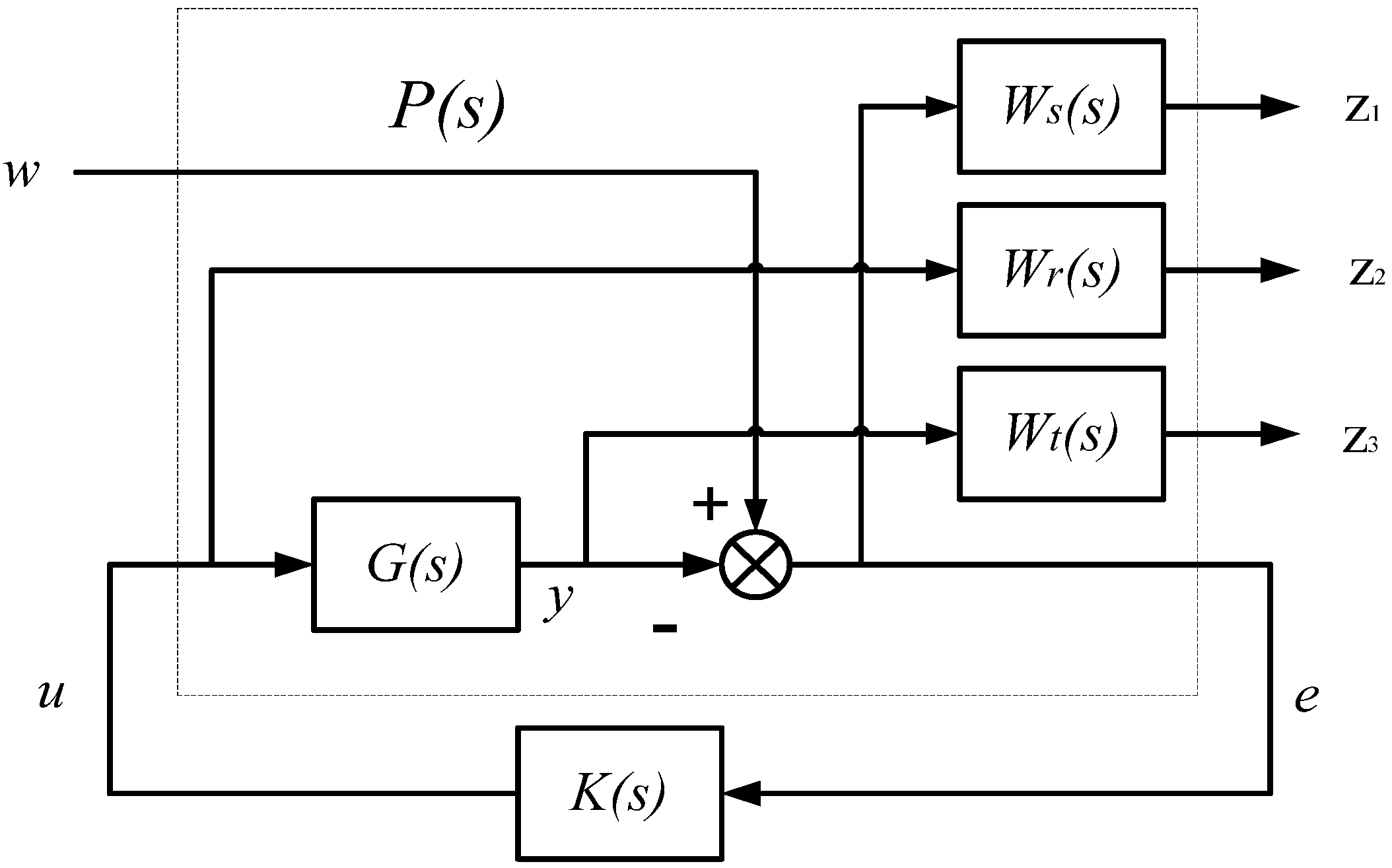
3.1. H∞ Mixed-Sensitivity Problem


3.2. Design Methodology of the Weighting Functions [23,24]
- (1)
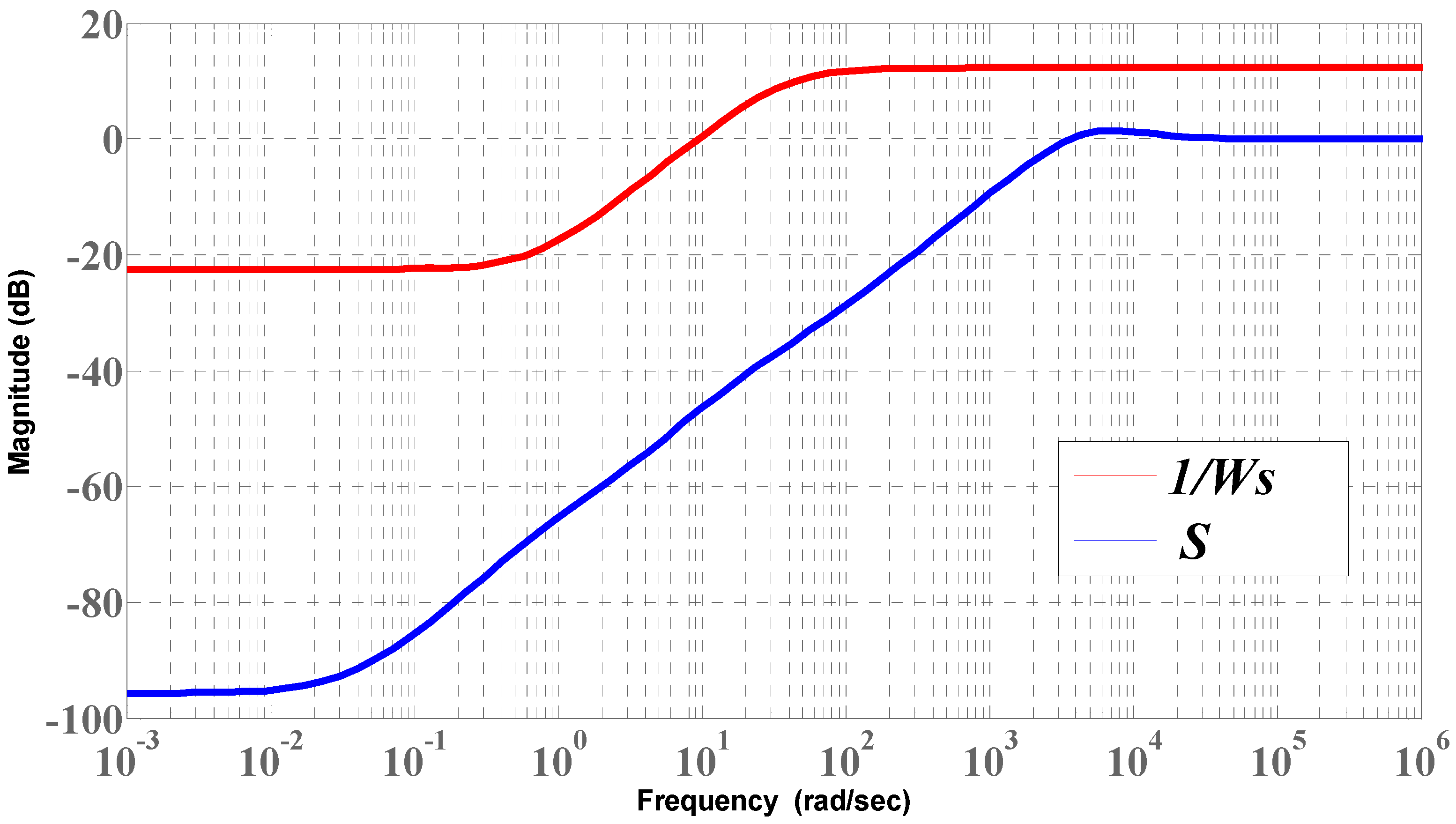
- The desirable Ws(s) has low-pass characteristics that ensure the tracking performance and disturbance attenuation. The maximum singular value of the sensitivity function S(s) should be less than the maximum singular value of 1/Ws(s) in all frequency domains:
- (2)
- (3)
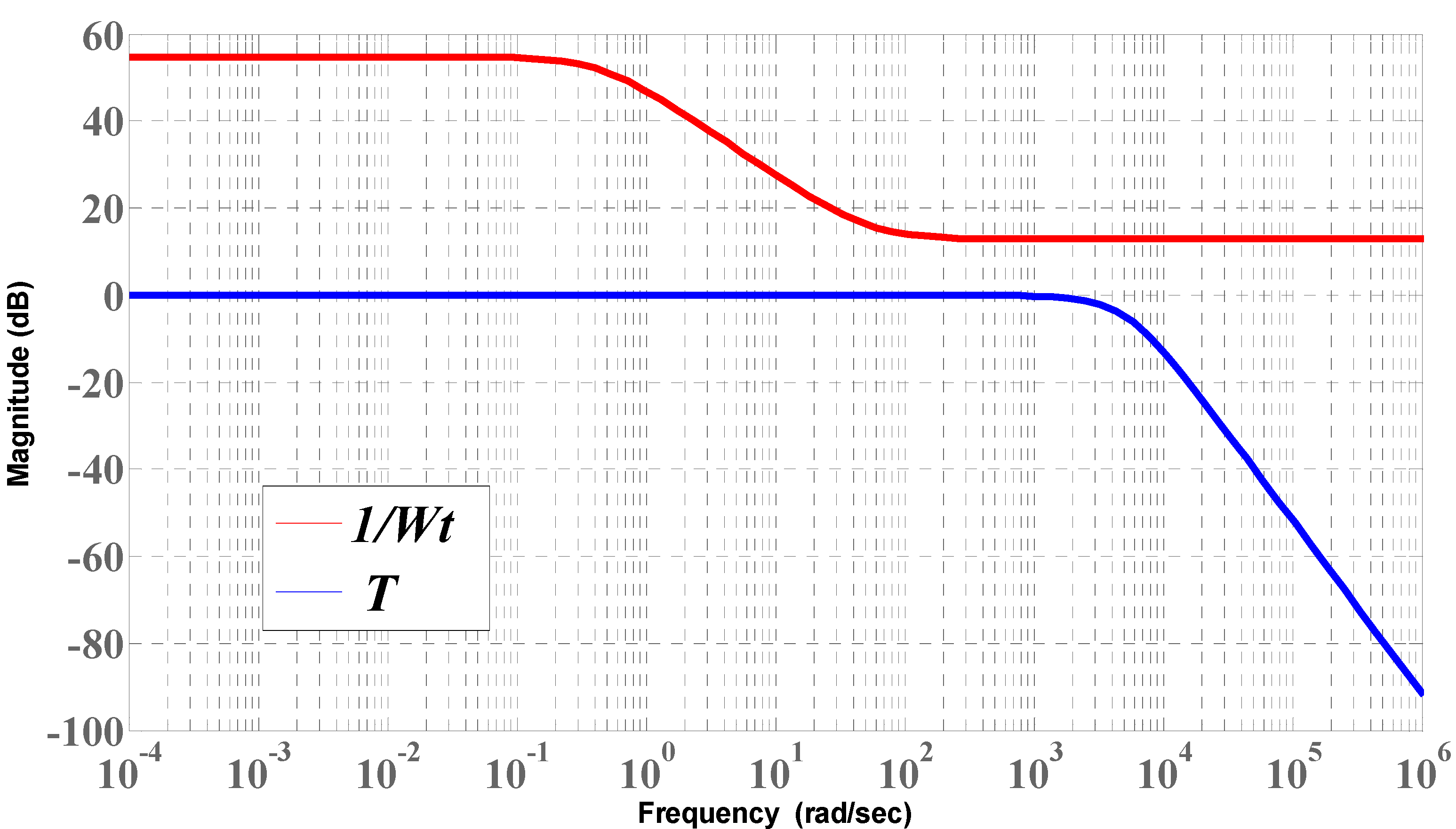
- Wt(s) restricts the robust boundary of the system. The maximum singular value of sensitivity function T(s) should be less than the maximum singular value of 1/Wt(s) in all frequency domains:
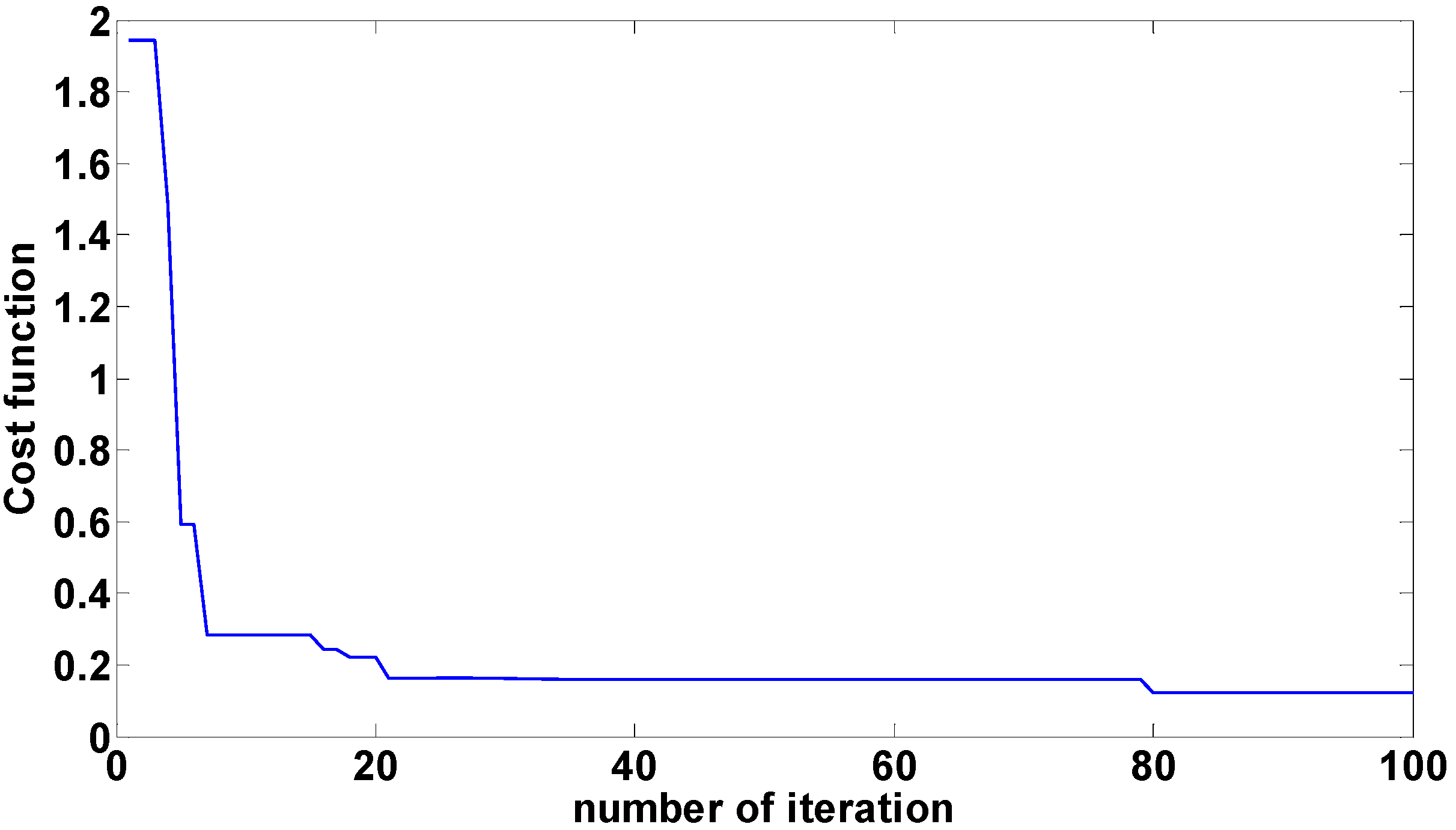
3.3. PSO-Based Controller Design
- (1)
- Specify the parameters of PSO. Initialize the population of the particles with random positions and velocities within the upper and lower bound values.
- (2)
- Get the generalized plant P(s) of the present parameters and calculate the optimal controllers. Evaluate the cost function for each particle using Equation (30).
- (3)
- Compare the fitness value of each particle with the pbest and gbest.
- (4)
- Update the velocity and position of the particle using Equations (31) and (32).
- (5)
- Check the particle position and velocity and initialize them if they cross the boundaries. Otherwise, increase the iteration by a step.
- (6)
- When the maximum number of iterations is achieved, stop the process. Otherwise, go to step 2).



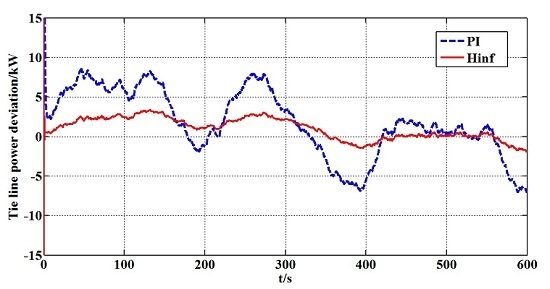
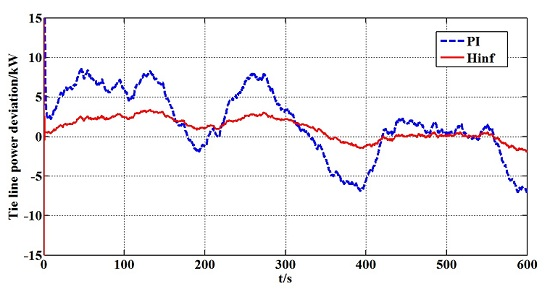
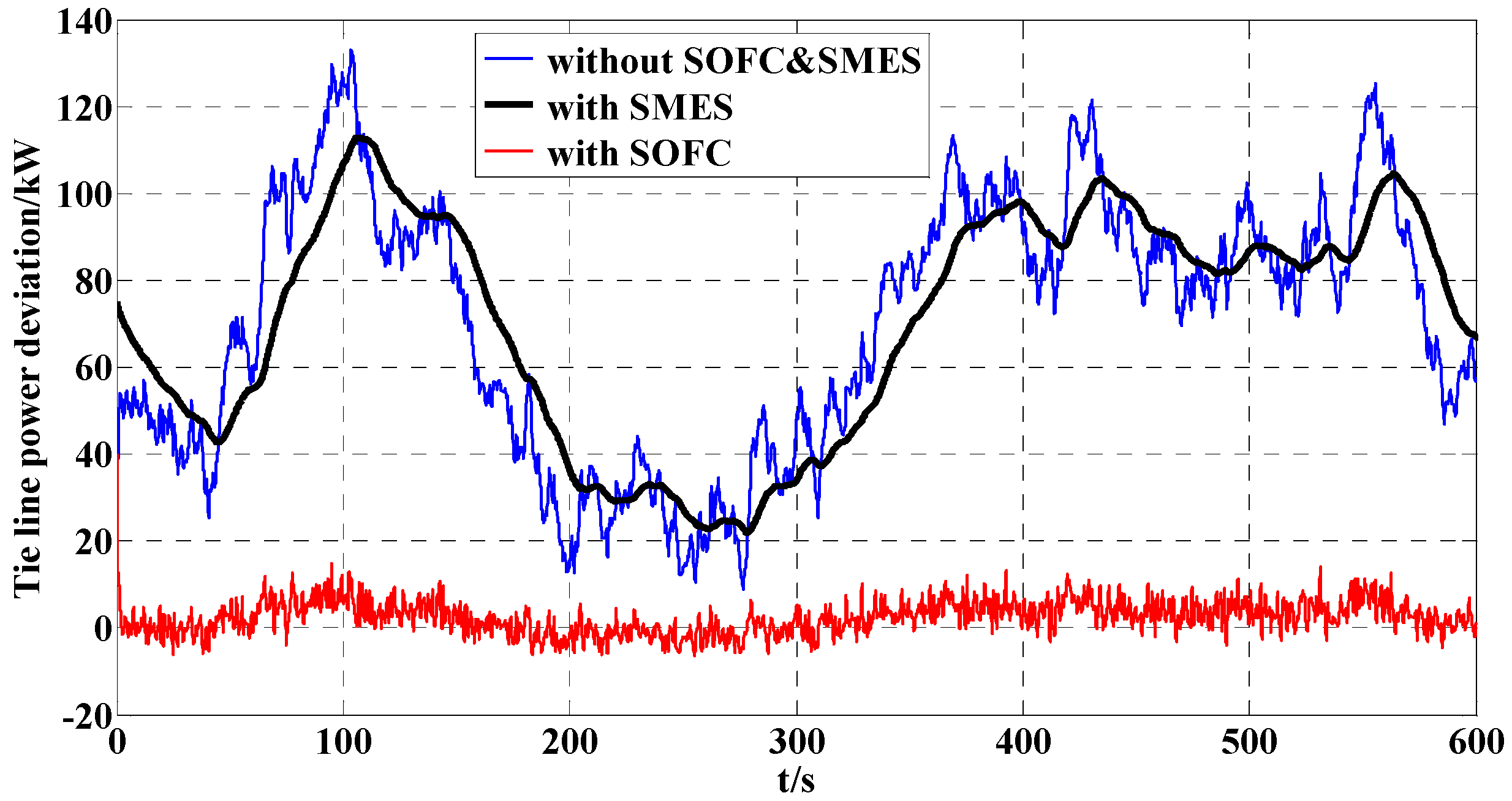
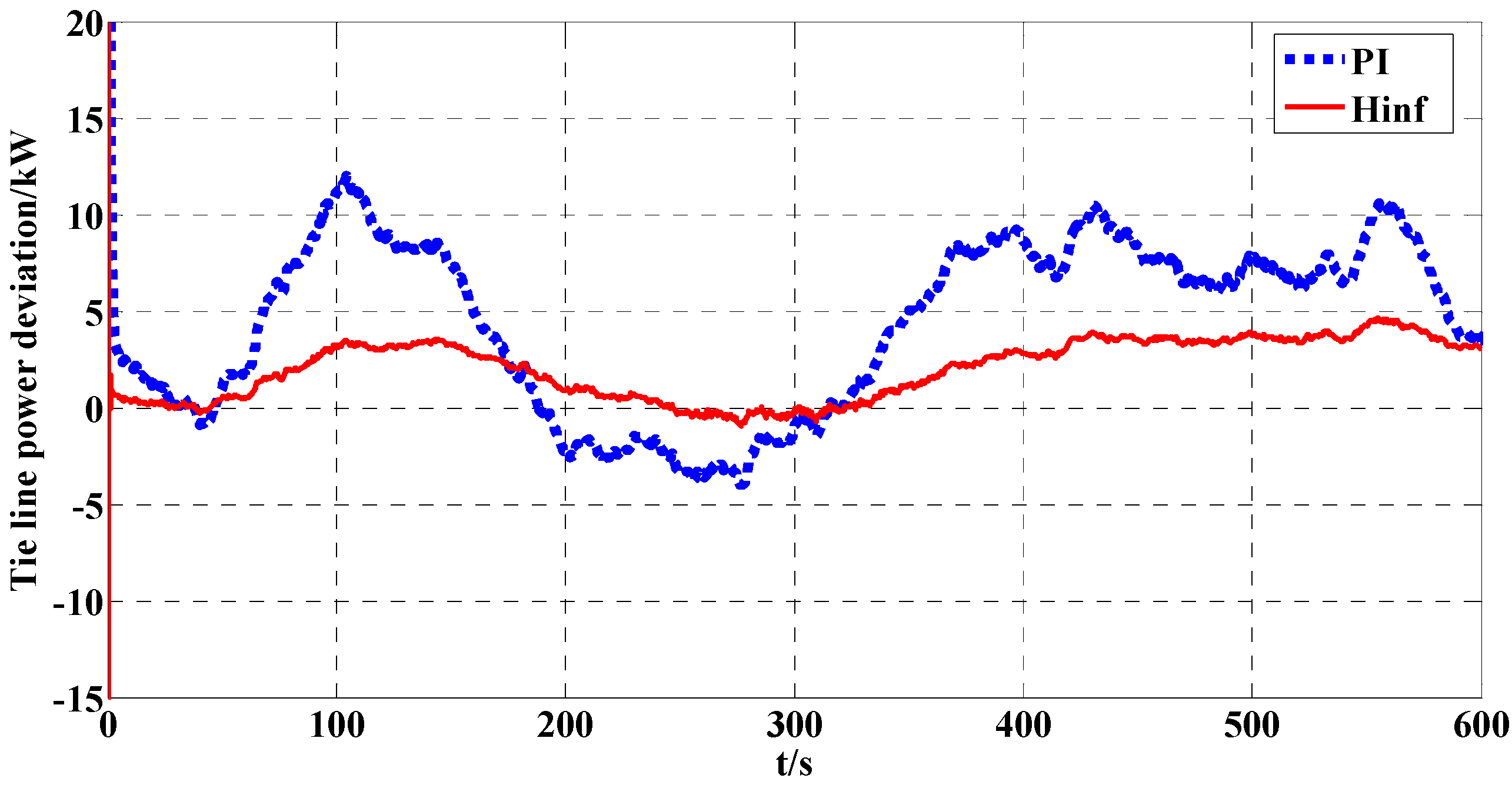
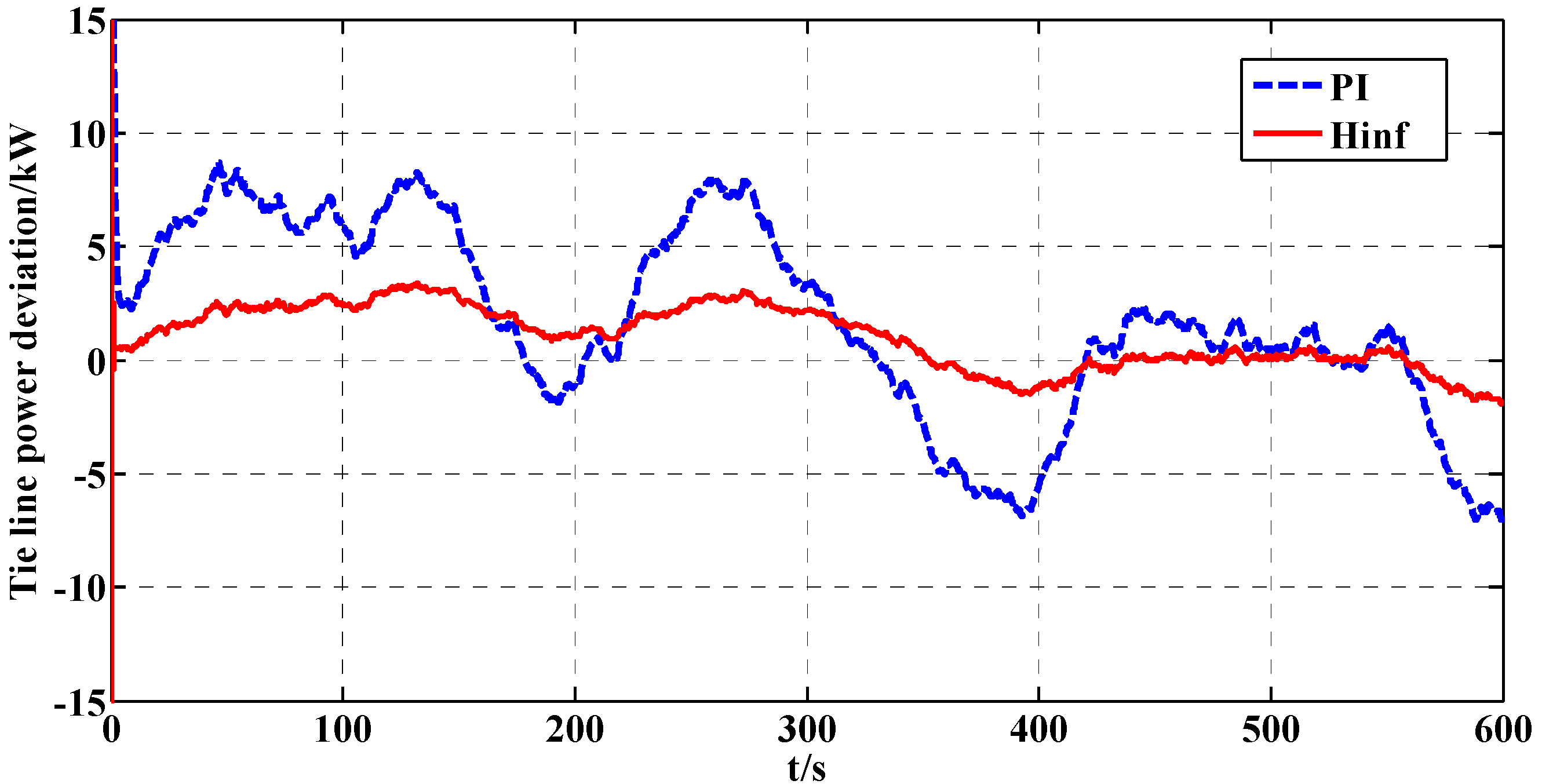
4. Simulation Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





5. Conclusions
Acknowledgments
References
- Suvire, G.O.; Mercado, P.E.; Ontiveros, L.J. Comparative Analysis of Energy Storage Technologies to Compensate Wind Power Short-Term Fluctuations. In Proceedings of IEEE/PES Transmission and Distribution Conference and Exposition, Sao Paulo, Brazil, 8–10 November 2010; pp. 522–528.
- Juan, Y. An integrated-controlled AC/DC interface for microscale wind power generation systems. IEEE Trans. Power Electron. 2011, 26, 1377–1384. [Google Scholar]
- Blaabjerg, F.; Chen, Z.; Kjaer, S.B. Power electronics as efficient interface in dispersed power generation systems. IEEE Trans. Power Electron. 2004, 19, 1184–1194. [Google Scholar]
- Kim, H.M.; Lim, Y.; Kinoshita, T. An intelligent multiagent system for autonomous microgrid operation. Energies 2012, 5, 3347–3362. [Google Scholar]
- Kim, H.M.; Kinoshita, T.; Shin, M.C. A Multiagent system for autonomous operation of islanded microgrids based on a power market environment. Energies 2010, 3, 1972–1990. [Google Scholar]
- Vachirasriciriku, S.; Ngamroo, I.; Kaitwanidvilaib, S. Application of electrolyzer system to enhance frequency stabilization effect of microturbine in a microgrid system. Int. J. Hydrog. Energy 2009, 34, 7131–7142. [Google Scholar]
- Li, X.; Song, Y.J.; Han, S.B. Study on Power Quality Control in Multiple Renewable Energy Hybrid Microgrid System. In Proceedings of the 2007 IEEE Power Technology, Lausanne, Switzerland, 1–5 July 2007; pp. 2000–2005.
- Li, X.; Song, Y.J.; Han, S.B. Frequency control in micro-grid power system combined with electrolyzer system and fuzzy pi controller. J. Power Sources 2008, 18, 468–475. [Google Scholar]
- Denver, F.C. Integration of a solid oxide fuel cell into a 10 mw gas turbine power plant. Energies 2010, 3, 754–769. [Google Scholar]
- Padullés, J.; Ault, G.W.; McDonald, J.R. An integrated SOFC plant dynamic model for power systems simulation. J. Power Sources 2000, 86, 495–500. [Google Scholar]
- Torgeir, S.; Alan, F.; Murat, K.; Farshid, Z. Macro level modeling of a tubular solid oxide fuel cell. Sustainability 2010, 2, 3549–3560. [Google Scholar]
- Buckles, W.; Hassenzahl, W.V. Superconducting magnetic energy storage. IEEE Power Eng. Rev. 2000, 20, 16–20. [Google Scholar]
- Saejia, M.; Ngamroo, I. Alleviation of power fluctuation in interconnected power systems with wind farm by SMES with optimal coil size. IEEE Trans. Appl. Supercond. 2012, 22, 571504. [Google Scholar]
- Ali, M.H.; Bin, W.; Dougal, R.A. An overview of SMES applications in power and energy systems. IEEE Trans. Sustain Energy 2010, 1, 38–47. [Google Scholar]
- Imaie, K.; Tsukamoto, O.; Nagai, Y. Control strategies for multiple parallel current-source converters of SMES system. IEEE Trans. Power Electron. 2000, 15, 377–385. [Google Scholar]
- Guan, T.Q.; Mei, S.W.; Lu, Q. Robust control design for power system including superconducting magnetic energy storage devices. Autom. Electr. Power Syst. 2001, 25, 1–6. [Google Scholar]
- Ngamroo, I.; Supriyadi, A.N.C.; Dechanupaprittha, S.; Mitani, Y. Stabilization of Tie-Line Power Oscillations by Robust SMES in Interconnected Power System with Large Wind Farms. In Proceedings of IEEE Transmission and Distribution Conference and Exposition, Seoul, Korea, 26–30 October 2009; pp. 1–4.
- Ngamroo, I. Simultaneous optimization of smes coil size and control parameters for robust power system stabilization. IEEE Trans. Appl. Supercond. 2011, 21, 1358–1361. [Google Scholar]
- Doyle, J.C.; Francis, B.A.; Tannenbaum, A.R. Feedback Control Theory; MacMillan: Toronto, ON, Canada, 1992. [Google Scholar]
- Zhou, K.M.; Doyle, J.C. Essentials of Robust Control. Englewood Cliffs; Prentice-Hall: Englewood Cliffs, NJ, USA, 1998. [Google Scholar]
- Oloomi, H.; Hossein, M. Weight Selection in Mixed Sensitivity Robust Control for Improving the Sinusoidal Tracking Performance. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December, 2003; pp. 300–305.
- Ortega, M.G.; Vargas, M.; Castaño, F. Improved design of the weighting matrices for the S/KS/T mixed sensitivity problem—Application to a multivariable thermodynamic system. IEEE Trans. Control Syst. Technol. 2006, 14, 82–90. [Google Scholar]
- Cifdaloz, O.; Rodriguez, A.A. H∞ Mixed-Sensitivity Optimization for Infinite Dimensional Plants Subject to Convex Constraints. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 866–871.
- Corcuera, A.D.; Pujana-Arrese, A.; Ezquerra, J.M.; Segurola, E.; Landaluze, J. H∞ based control for load mitigation in wind turbines. Energies 2012, 5, 938–967. [Google Scholar]
- Shi, Y.H.; Eberhart, R.C. Empirical Study of Particle Swarm Optimization. In Proceedings of the 1999 Congress on Evolutionary Computation, Washington, DC, USA, 6–9 July 1999; pp. 1945–1950.
- Duan, P.; Xie, K.G.; Gao, T.T.; Huang, X.G. Short-term load forecasting for electric power systems using the PSO-SVR and FCM clustering techniques. Energies 2011, 4, 173–184. [Google Scholar]
- Kennedy, J.; Eberhart, R.C. Particle Swarm Optimization. In Proceedings of IEEE Internet Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948.
- Gaing, Z.L. A particle swarm optimization approach for optimum design of PID controller in AVR system. IEEE Trans. Energy Convers. 2004, 19, 384–391. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zhang, N.; Gu, W.; Yu, H.; Liu, W. Application of Coordinated SOFC and SMES Robust Control for Stabilizing Tie-Line Power. Energies 2013, 6, 1902-1917. https://0-doi-org.brum.beds.ac.uk/10.3390/en6041902
Zhang N, Gu W, Yu H, Liu W. Application of Coordinated SOFC and SMES Robust Control for Stabilizing Tie-Line Power. Energies. 2013; 6(4):1902-1917. https://0-doi-org.brum.beds.ac.uk/10.3390/en6041902
Chicago/Turabian StyleZhang, Ning, Wei Gu, Haojun Yu, and Wei Liu. 2013. "Application of Coordinated SOFC and SMES Robust Control for Stabilizing Tie-Line Power" Energies 6, no. 4: 1902-1917. https://0-doi-org.brum.beds.ac.uk/10.3390/en6041902