1. Introduction
Over the period 1990–2010, fossil fuels (e.g., oil, coal, gas) contributed 83% of the growth in energy. Due to the crisis of exhausting fossil fuels and considering the green-house effect, it is predicted that over the next twenty years, fossil fuels contribute 64% of the growth in energy. Renewables (e.g., wind, solar, hydro, wave, biofuels) account for 18% of the growth in energy to 2030. The rate at which renewables penetrate the global energy market is similar to the emergence of nuclear power in the 1970s and 1980s [
1]. Among the renewable sources, wind energy is one of the most rapidly growing renewable power source [
2]. Wherever the wind speed exceeds approximately 6 m/s there are possibilities for exploiting it economically, depending on the costs of competing power sources [
3].
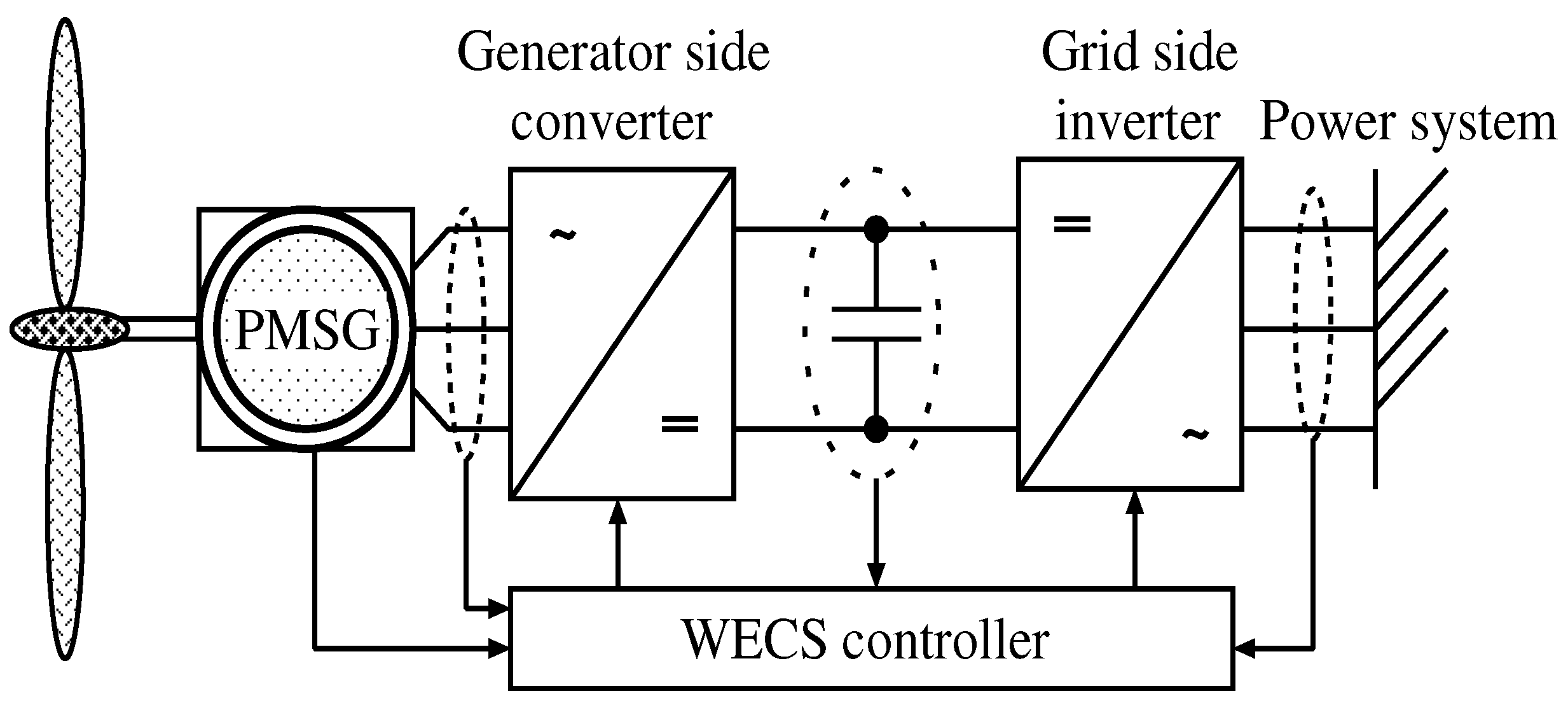
Variable speed wind turbines (VSWTs) can utilize the wind energy proficiently. VSWTs are equipped with the doubly fed induction generators (DFIGs) or the permanent magnet synchronous generators (PMSGs). The popularity of the PMSG based wind energy conversion system (WECS) has been increased because of the simple structure, availability, and efficient power producing capability [
4]. However, wind velocity is a highly stochastic component which can diverge very quickly. So, the control of the WECS at different places with different wind velocities is a very challenging task. Various control synthesis methods have been applied in response to the WECS control problems, such as PI control [
4,
5,
6,
7,
8,
9], LQG control [
10,
11], or fuzzy control [
12,
13]. Most of the researches [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13], provided controllers are designed around an operating point and are valid only for a particular range of operation which are not covered the whole operating region. Most of the cases, wind velocities are chosen within variations ±1 m/s or ±2 m/s of the rated wind velocity, or below the rated wind velocity, and simulation results are provided within single range of wind velocities. Therefore, closed-loop stabilities are guaranteed only for the small-range of parameters deviation. Moreover, these control methods are not robust. During the high wind turbulence, PI controller is not ideal. The adaptive controllers such as fuzzy and LQG, the parameters adjustment of these controllers are computationally expensive [
3]. Therefore, taking into account of the power producing capacity of the modern WECS (2–5 MW), the high turbulence wind velocities, and the parameter uncertainties, the researchers have prompted to interest in the robust control concepts (e.g.,
or
controllers). In particular, the robust
controller formulation for the WECS is adopted in [
3,
14,
15,
16,
17], to improve the performance at the high turbulence wind velocities, or parameter uncertainties.
In [
3,
14,
15], the
control systems design for the DFIGs. The control performance evaluates in a few parameters within the rated wind speed and some short variations of the rated wind speed. There aren’t comparisons with other conventional methods. In [
16,
17], the
control system design for the drive-train of the WECS and there are simulation analyses only for the wind speed and rotational speed of the generator. There aren’t descriptions about the generated power and other WECS parameters. On the other hand, continuous signals based
controllers (
i.e., continuous
controllers) are designed in all the previous researches. Usually, a
control theory is very complex to design for a particular system. So, it is very complicated to implement a continuous
controller in the real-world systems. The digital
controller can be implemented for a system through the micro-controller. Also, a computer software can handle some complex parts of the controller. Nowadays micro-controller is inexpensive, under $5 for many micro-controllers. It can easy to configure and reconfigure through a software. It is highly adaptable, parameters of the program can change with anytime. Digital computers are much less prone to environmental conditions than capacitors, inductors,
etc. To consider these factors, it is very important to design a digital
controller based system. But there isn’t research on the digital
controller based WECS.
This paper presents a digital
controller based grid connected WECS. A sub-optimal
discrete-time loop shaping design procedure (DLSDP) is applied in this paper [
18]. Described herein is a comprehensive and systematic way of implementing a new methodology of
control design algorithm for a 2 MW PMSG based WECS in a power system. The mechanical dynamics are controlled by PI based pitch angle control system while generator-side converter and grid-side inverter are regulated via the digital
controller. The proposed method is compared with the conventional PI controller method and the fuzzy controller method. Operational stabilities, reduced shaft stress, and improved voltage and power qualities are verified by the MATLAB/SIMULINK
® environment with the
Linear Matrix Inequality (LMI) technique.
3. Power Converter Control System of WECS
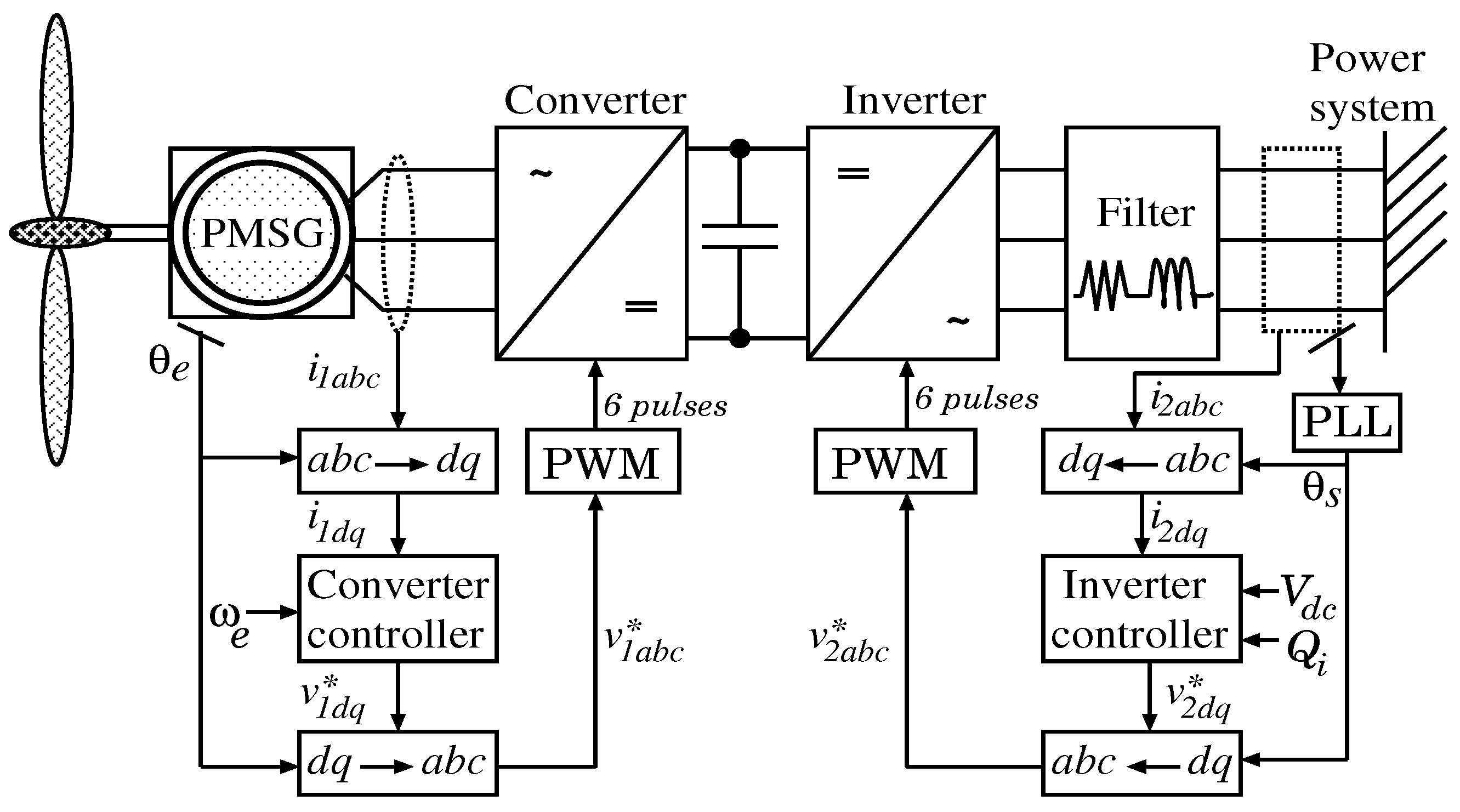
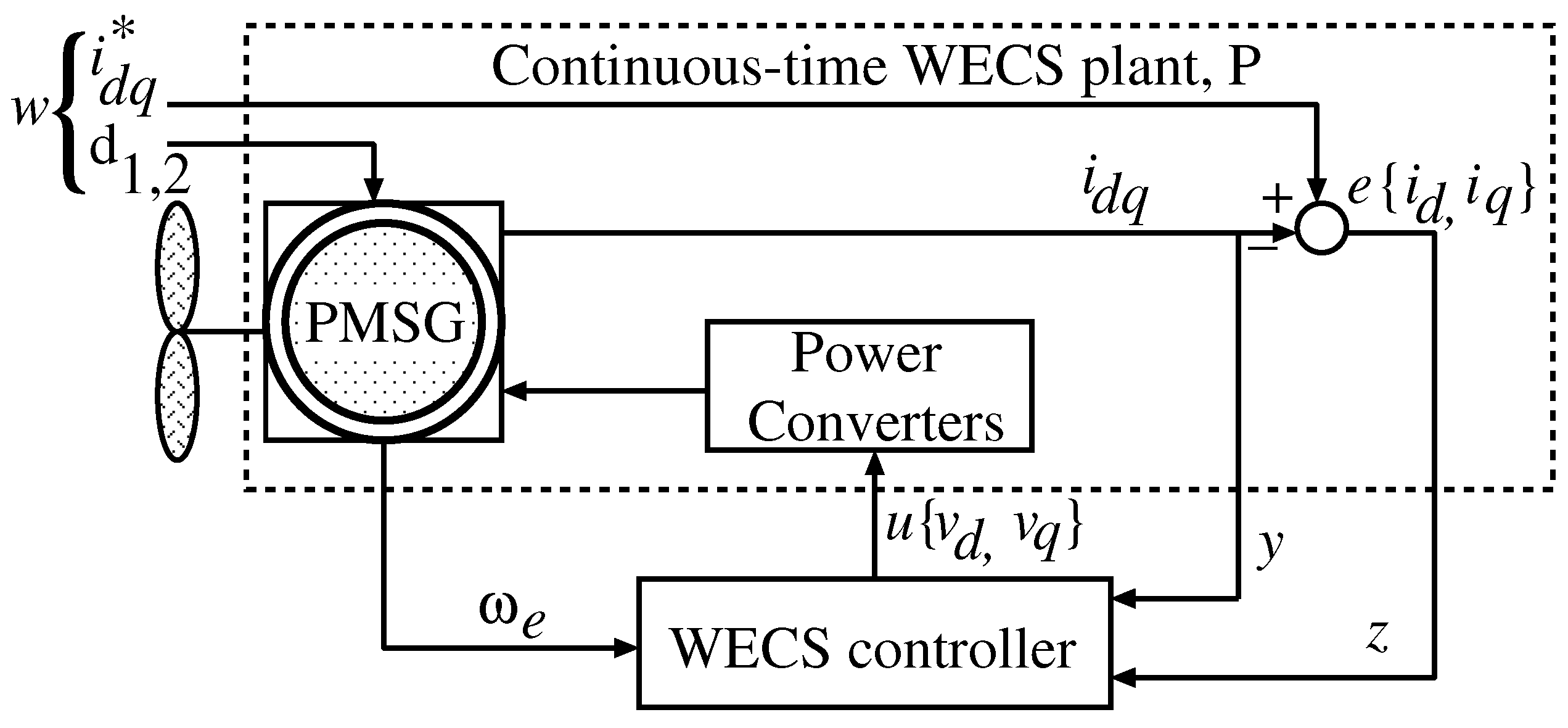
The WECS adopts an AC-DC-AC power converter method with voltage source converters (VSCs). The PMSG is connected to the grid through two PWM VSCs: a generator-side converter and a grid-side inverter. The generator-side converter controls the generator torque of the PMSG, while the grid-side inverter controls the DC-link voltage and the grid voltage, respectively. The power converter control system is shown in
Figure 5. Each of the four quadrant power converters is a standard 3-phase two-level unit, composed of six insulated gate bipolar transistors (IGBTs) and controlled by the triangular-wave (10 kHz) PWM law. Each of the configurations of the control system is described below.
Figure 5.
Power converter control system.
Figure 5.
Power converter control system.
3.1. Conventional PI Control System
3.1.1. Generator-Side Converter
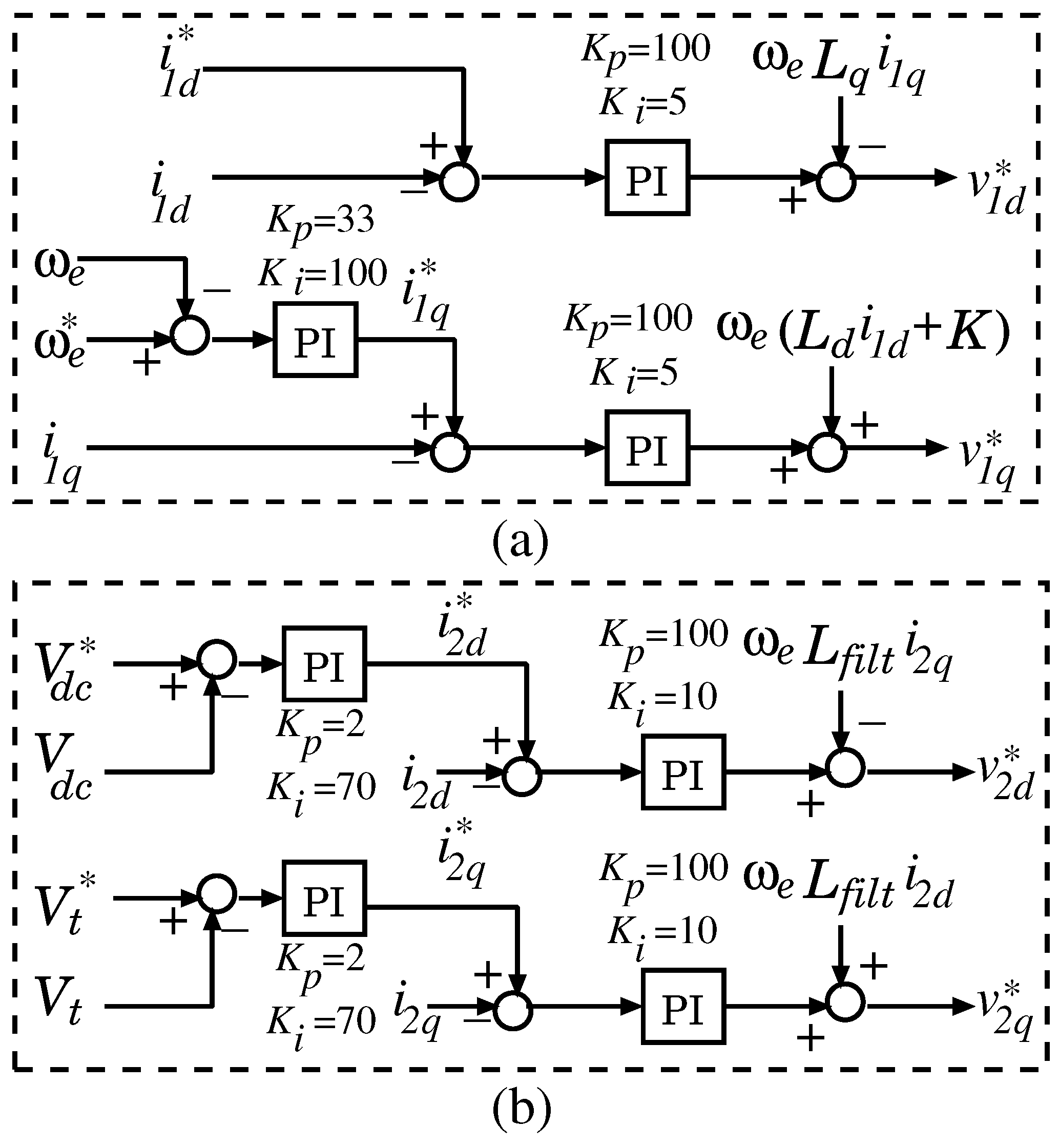
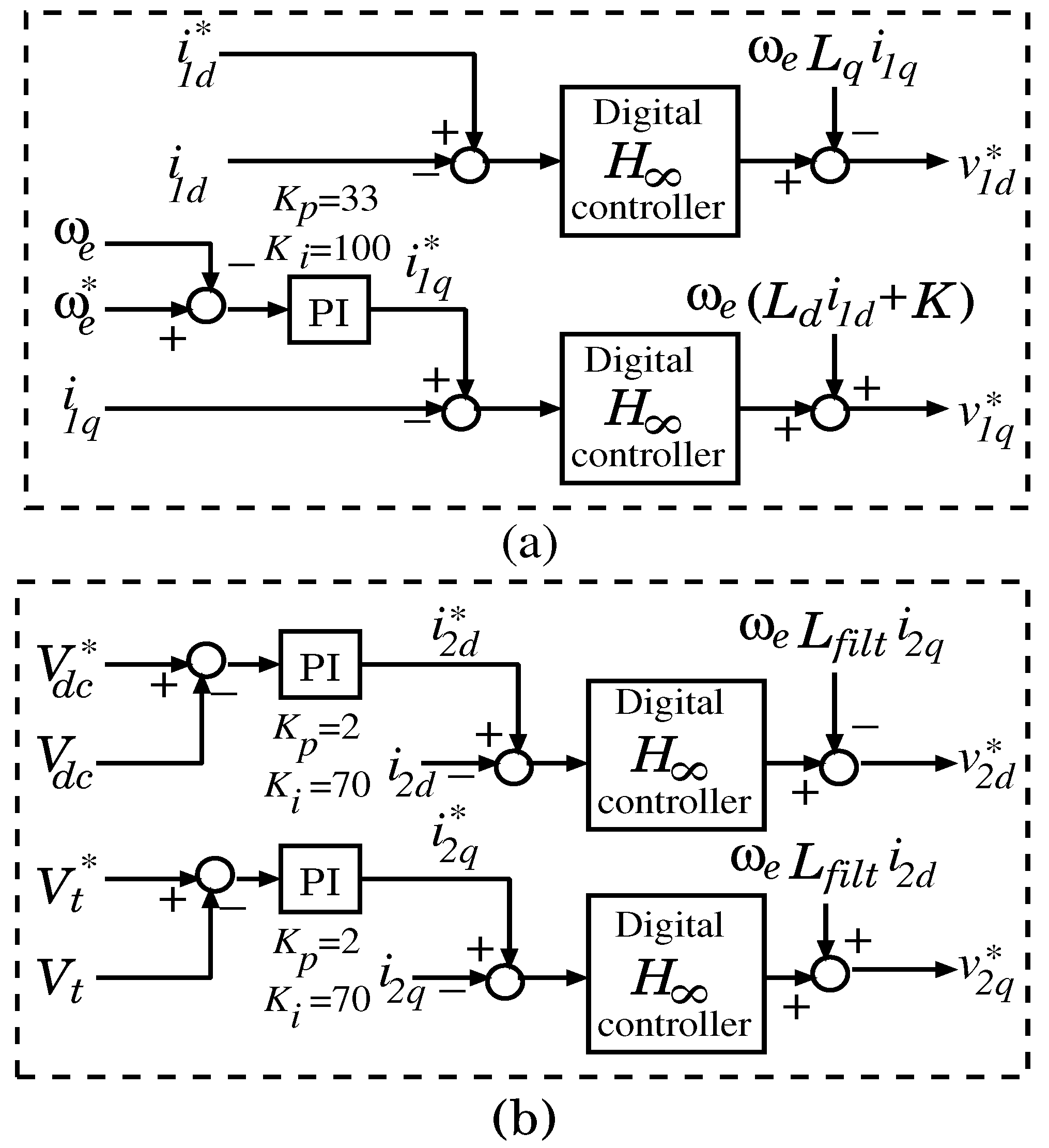
The generator-side converter controls the rotational speed of the PMSG. The vector control scheme is shown in
Figure 6a,b. Output of the speed controller is generated the
q-axis stator current command
. The
d-axis stator current
, is set to zero. The current controller outputs generate the
-axis voltage commands
and
after decoupling. In this figure,
is the PMSG’s electrical speed,
and
are the
-axis inductances, and
K is the permanent magnet flux.
3.1.2. Grid-Side Inverter
The grid-side inverter controls the DC-link voltage
and the grid voltage
. The DC-link capacitor value is chosen to be 15,000 µF. The control system for the grid-side inverter is shown in
Figure 6a. The
d-axis current can control the DC-link voltage
, and the
q-axis current can control the grid voltage
. The
and
are the DC-link voltage command and the grid voltage command, respectively. The controller outputs are
-axis voltage commands
and
. The angle
is detected by the phase-locked loop (PLL) for the Park transformation.
The PI controllers gains are shown in each figure. Usually PI controller tuning is a difficult problem due to the limitations of PI controller. The PI controller gains are adjusted by the manual methods for loop tuning.
Figure 6.
(a) Generator-side converter control system; (b) Grid-side inverter control system.
Figure 6.
(a) Generator-side converter control system; (b) Grid-side inverter control system.
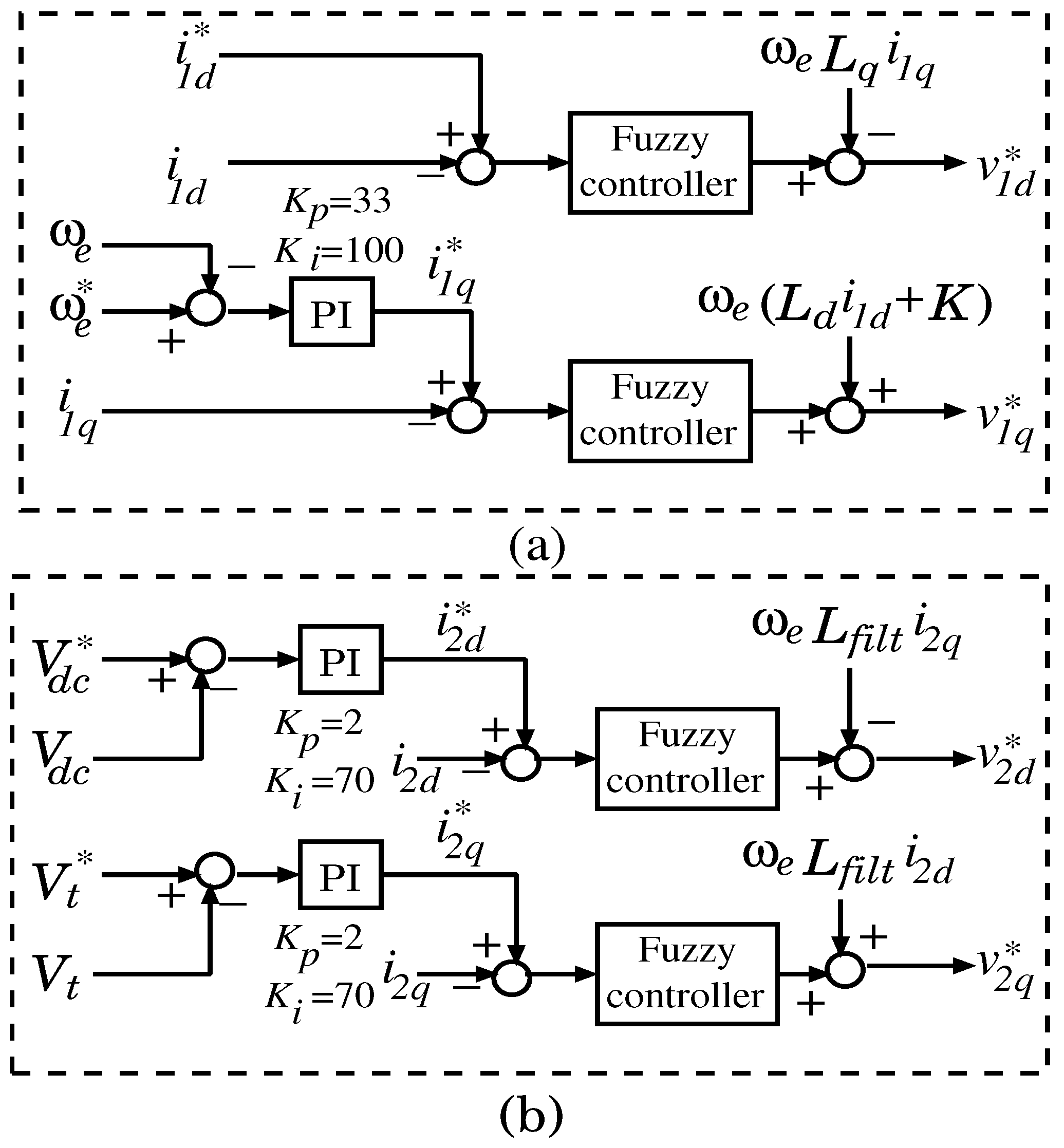
3.2. Fuzzy Control System
Due to the non-linear behavior of the power system and the linearization problems, the control of the variable speed WECS is difficult by using the conventional PI controller methods. The fuzzy controller is a rule based non-linear control technique. The fuzzy controller presents some advantages as compared with the PI controller. It can obtain variable gains depending on the errors and overcomes the problems which are affected by an uncertain model. The detail analyses of the inverter and converter control systems for the WECS are given in previous section. The fuzzy controller based converter control system and inverter control system are shown in
Figure 7a,b respectively. From these figures, the conventional PI controllers are replaced by the fuzzy controllers.
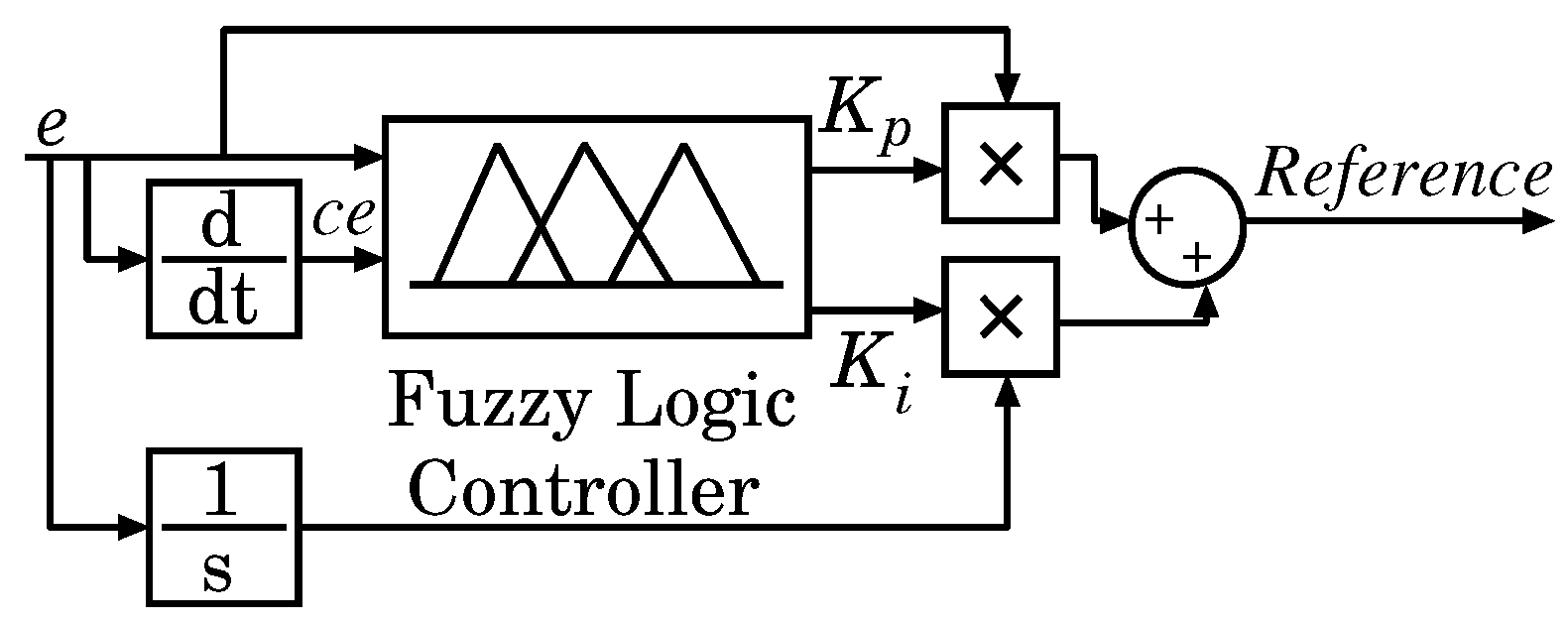
Figure 8 shows the detail of the fuzzy based PI control system. It is a multi input−multi output (MIMO) based fuzzy control system. There are two inputs of fuzzy controller such as the system error,
e and the change of error
and two outputs of fuzzy controller that are the proportional gain
and the integral gain
. Depend on error and the change of error, the fuzzy controller delivers the proportional gain
and the integral gain
for the PI controller, and generates a reference signal.
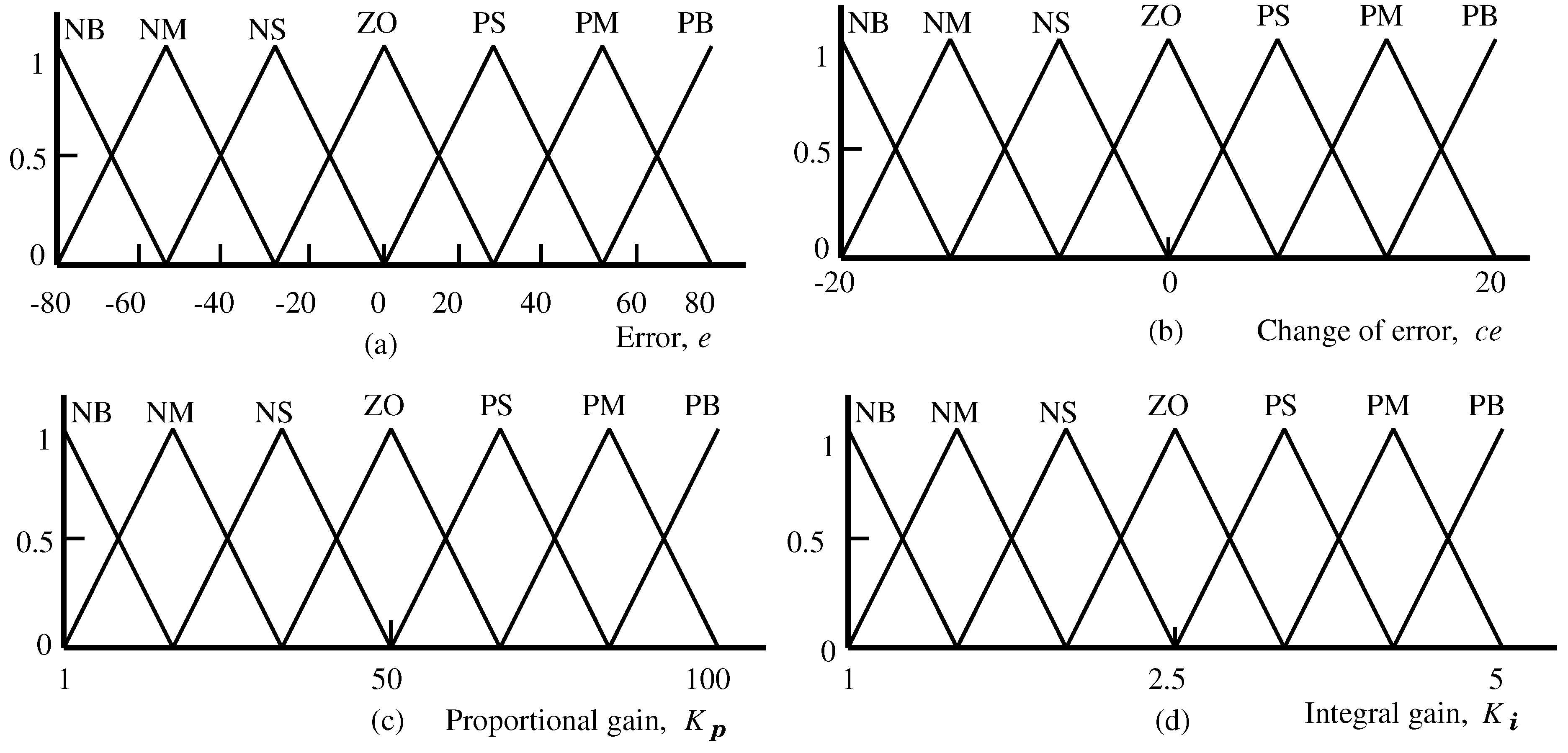
Figure 9a,b shows the fuzzy input membership functions (
i.e., error and change of error), and
Figure 9c,d shows the output membership functions (
i.e., proportional gain
and integral gain
) of the fuzzy controller. The fuzzy controller rules are given in
Table 1 in which the linguistic variables are represented by negative big (NB); negative medium (NM); negative small (NS); zero (ZO); positive big (PB); positive medium (PM); and Positive small (PS).
Figure 7.
(a) Generator-side converter control system; (b) Grid-side inverter control system.
Figure 7.
(a) Generator-side converter control system; (b) Grid-side inverter control system.
Figure 8.
Fuzzy controller based PI control system.
Figure 8.
Fuzzy controller based PI control system.
Figure 9.
Fuzzy membership functions (a) input members; error e (b) input members; change of error (c) output members; proportional gain (d) output members, integral gain .
Figure 9.
Fuzzy membership functions (a) input members; error e (b) input members; change of error (c) output members; proportional gain (d) output members, integral gain .
Table 1.
Fuzzy membership functions.
Table 1.
Fuzzy membership functions.
| Kp & Ki | e |
| NB | NM | NS | ZO | PS | PM | PB |
| ce | NB | NB | NB | NB | NB | NM | NS | ZO |
| NM | NB | NB | NM | NM | NS | ZO | PM |
| NS | NB | NM | NS | NM | ZO | PS | PM |
| ZO | NB | NM | NS | ZO | PS | PM | PB |
| PS | NM | NS | ZO | PS | PS | PM | PB |
| PM | NM | ZO | PS | PM | PM | PB | PB |
| PB | ZO | PS | PM | PB | PB | PB | PB |
The fuzzy rules and membership functions are determined by the trail-and-error process. Various methods have been proposed for tuning the fuzzy controller, such as selftuning algorithm based on an experimental planning method, where the scaling factors of optimal parameters can be determined efficiently according to the desired performance indexes, Taguchi tuning method, and tuning the membership functions. However, in this paper, the selection of scaling factors is based on the trial-and-error method.
5. Simulation Results
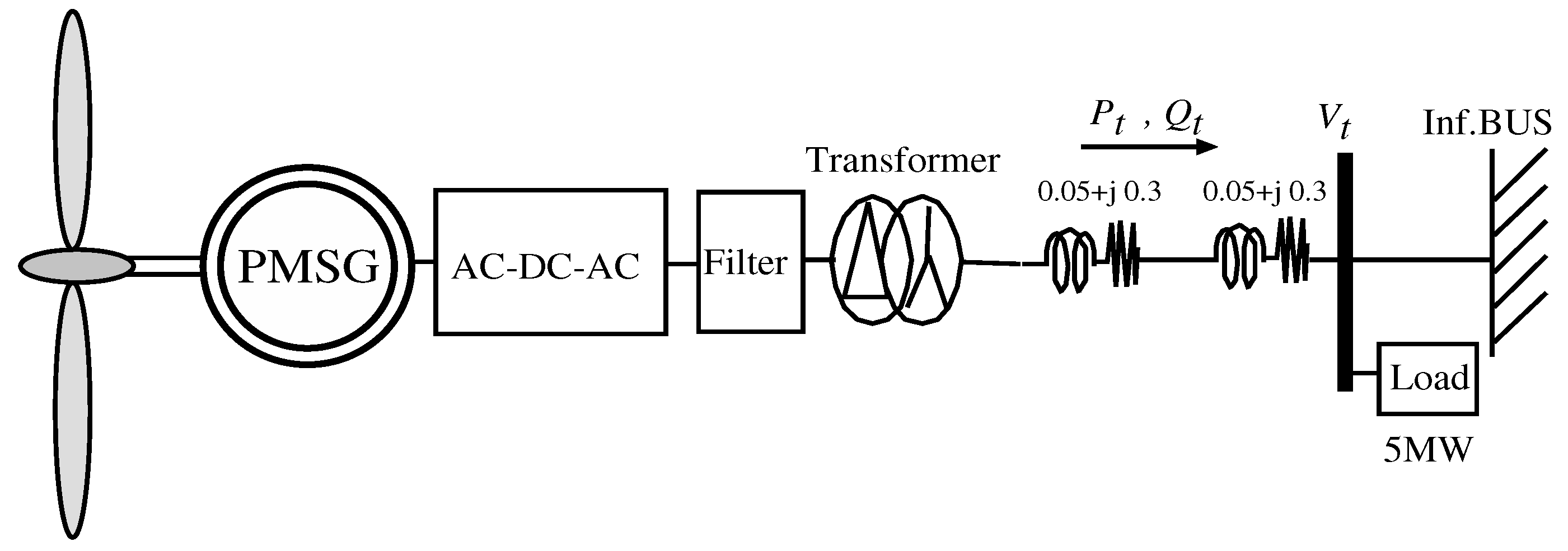
The overall power system for the numerical simulation is shown in
Figure 13. In this figure, the grid-side inverter is connected to an infinite bus and a local load through a
-filter, transformer and transmission line. The parameters of the wind turbine, PMSG and power converters are given in
APPENDIX. To evaluate effectiveness of the proposed method, WECS operations are verified under two different types of the wind velocities which are confirmed the robust stabilities. The simulation results are compared among the conventional method (
i.e., PI controller method), the fuzzy controller method, and the proposed method (
i.e., digital
controller method).
Figure 13.
Power system model.
Figure 13.
Power system model.
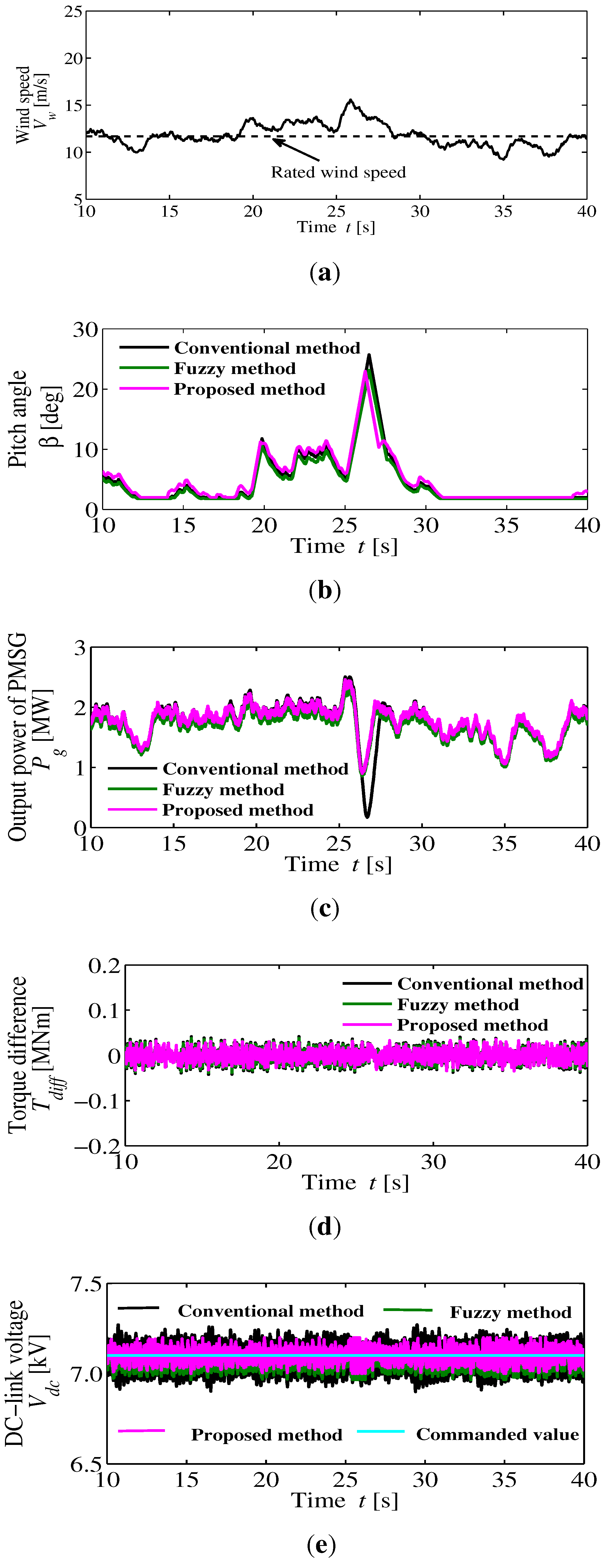
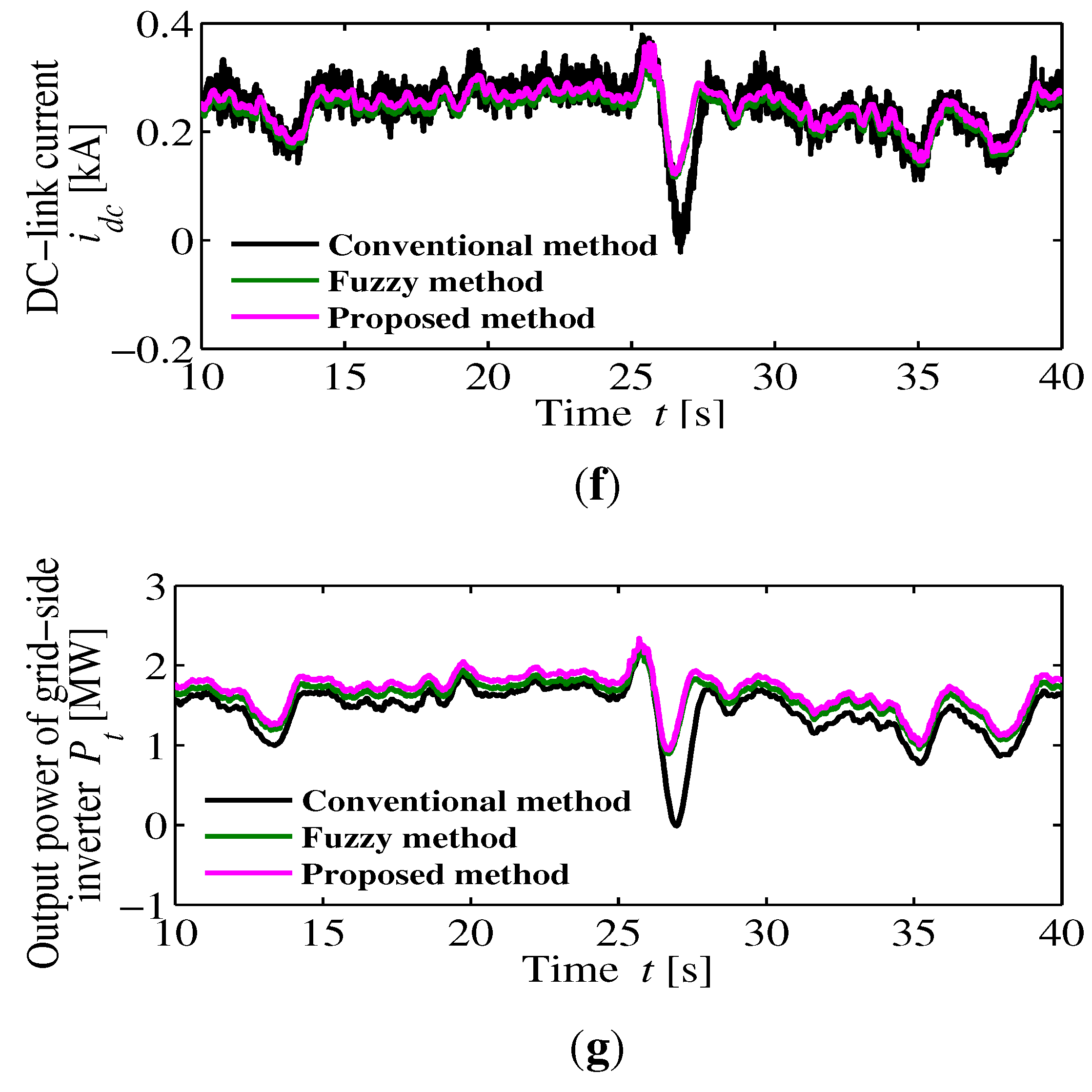
5.1. Low Turbulence Wind Velocity
Figure 14 shows the simulation results at the low turbulence wind speed. The wind speed is shown in
Figure 14a. The rated wind speed is 12 m/s (dashed line) and wind speed is varied from 9 m/s to 15 m/s. The pitch angle (
Figure 14b) activates with respect to the wind speed to control the rated power of the PMSG (2 MW). At simulation time (25–30 s), wind speed is high and the pitch angle is also high in this period. The output power of the PMSG is shown in
Figure 14c. From this figure, the proposed method and the fuzzy controller method can generate more stable output power as compared with the conventional PI controller method. At simulation time (25–30 s), output power of the conventional method becomes unstable due to the high fluctuation of wind speed. In
Figure 14d, the torque difference (
i.e., difference between input torque and output torque of the PMSG) is reduced by the proposed method as compared with the fuzzy controller method and conventional method. Therefore, the proposed method can reduce the shaft stress of the WECS. From
Figure 14e,f, the high frequency components of the DC-link voltage and current are reduced by the proposed method. So, it can reduce the size and stress of the DC-link capacitor. The proposed method can inject an efficient output power to the power grid as compared with the conventional method and the fuzzy controller method which is confirmed in
Figure 14g. But the fuzzy controller method can deliver an almost similar power as the proposed method and shows a good performance as compared with the conventional method. From this figure, power loss of the proposed method is lower than that of the conventional method because the proposed method can improve qualities of the torque difference, DC-link current and voltage.
Figure 14.
Simulation Results (Low turbulence wind speed). (a) Wind speed; (b) Pitch angle; (c) Output power of PMSG; (d) Torque difference; (e) DC-link voltage; (f) DC-link current; (g) Output power of grid-side inverter.
Figure 14.
Simulation Results (Low turbulence wind speed). (a) Wind speed; (b) Pitch angle; (c) Output power of PMSG; (d) Torque difference; (e) DC-link voltage; (f) DC-link current; (g) Output power of grid-side inverter.
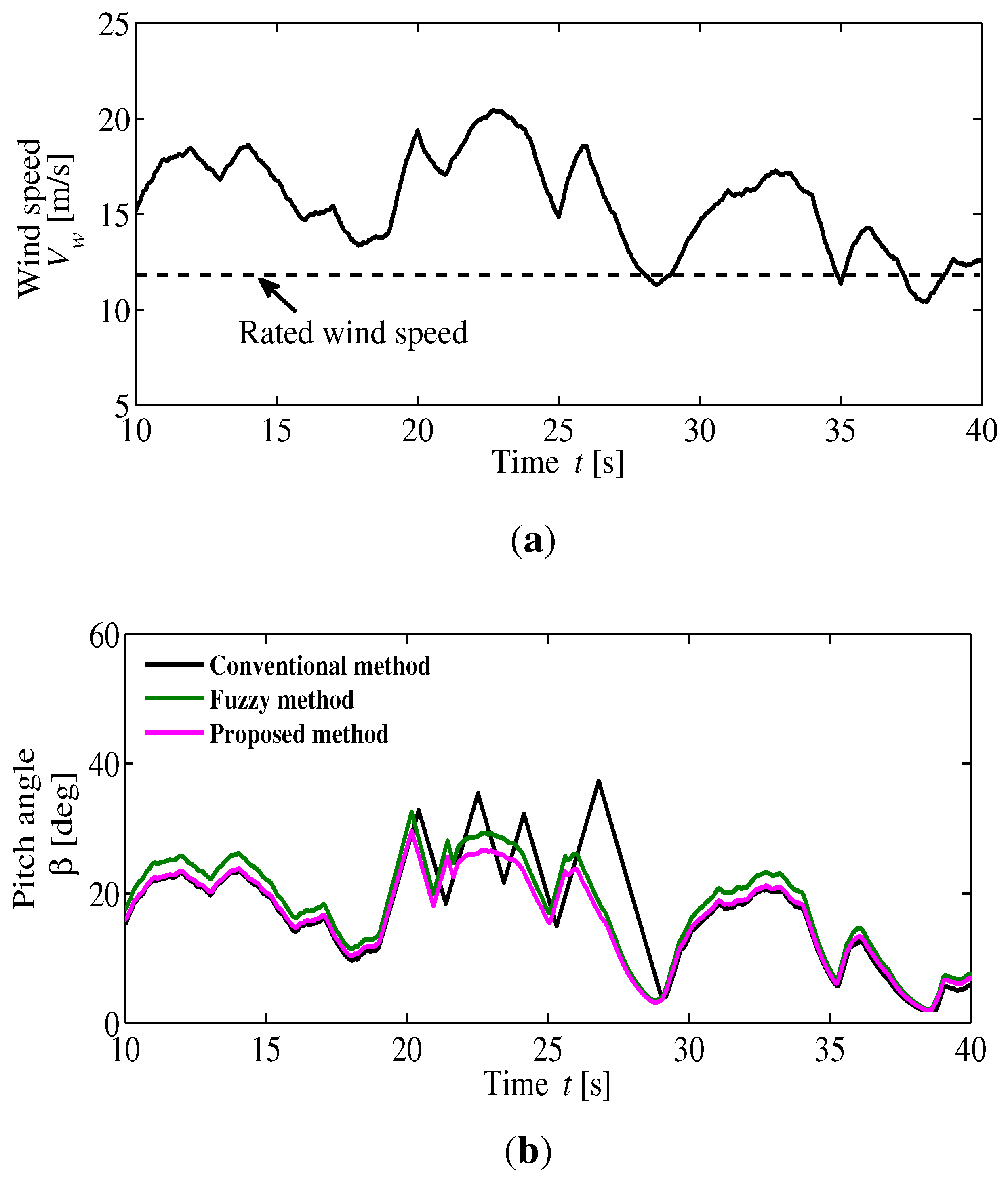
5.2. High Turbulence Wind Velocity
Figure 15 shows the simulation results for another pattern of the wind velocity. It considers as the high turbulence wind speed. The wind speed is received by the WECS which is shown in
Figure 15a. It is higher than the rated wind speed. The pitch angle is shown in
Figure 15b.
Figure 15c,d reflects the final outcomes (
i.e.,
and
) of three different methods. In
Figure 15c, the
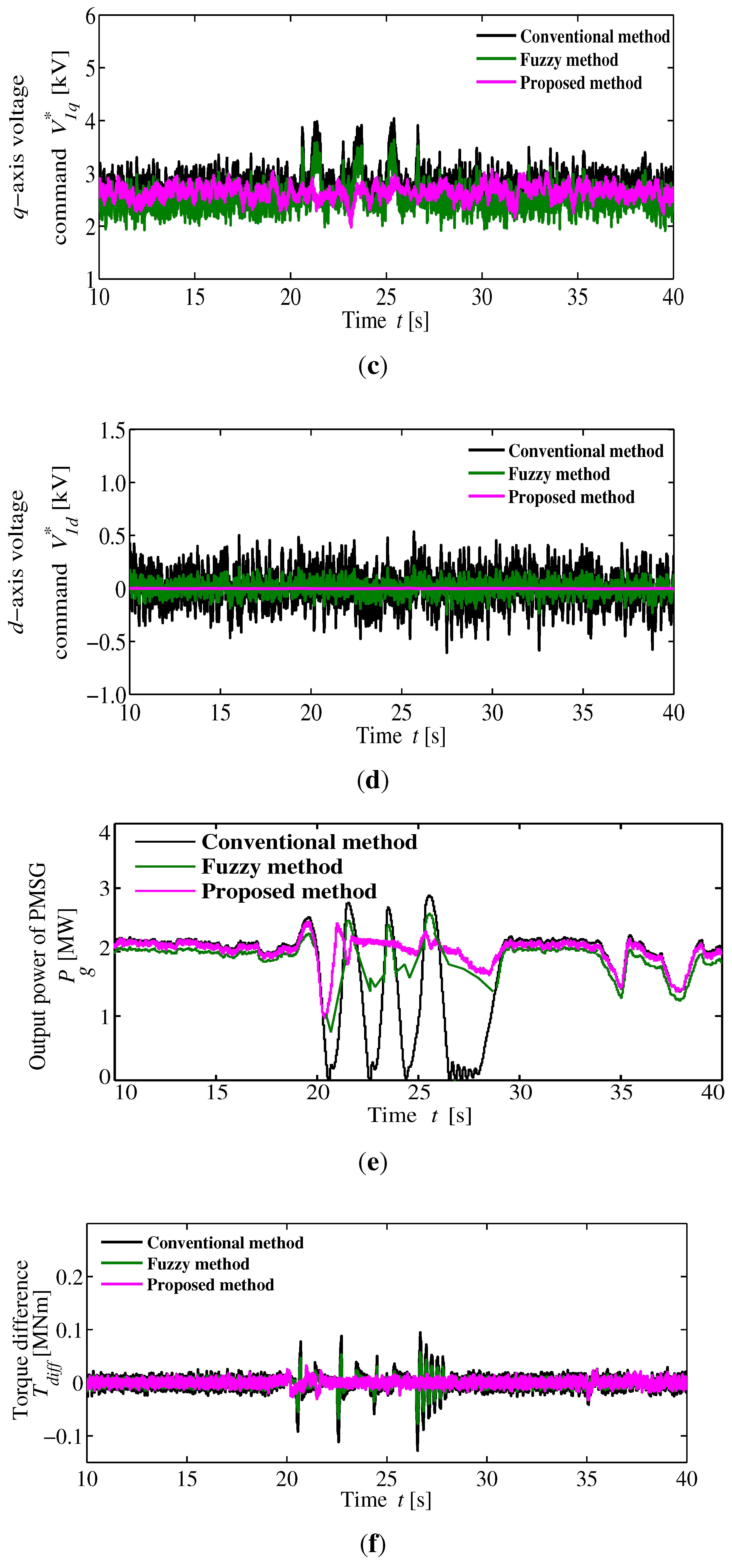
q-axis commanded voltage is fluctuated widely by the conventional method and the fuzzy controller method (especially at simulation time 20–30 s) as compared with the proposed method. From
Figure 15d, the
d-axis commanded voltage is controlled precisely by the proposed method. Usually, the PI controller gains (proportional and integral) adjustment depend on the wind speed. For different set of wind speeds, the PI controller gains are different and required additional adjustments. If the PI controller gains regulate for the low turbulence wind velocities, these may not perfect for the high turbulence wind velocities or vice versa. On the other hand, the fuzzy controller method can show the similar behavior as the proposed in low turbulence wind speed (in
Figure 14) but in high turbulence wind velocity the proposed method shows a superior performance as compared with the fuzzy controller method. The tuning of fuzzy controllers (gains and rules) is perfect in the low turbulence wind speed but in high turbulence wind speed, the fuzzy controller requires additional tuning to improve the performance. But in both cases, the fuzzy controller method can improve the performance as compared with the conventional PI controller method. In case of the proposed control method, it can apply at different wind speeds without additional adjustments.
Figure 15e shows a comparison of the generated power of the PMSG. From this figure, generated power of the conventional method becomes unstable due to the high turbulence wind velocity. The proposed method can generate stable output power as compared with the conventional method. The fuzzy controller method can generate a stable power as compared with the conventional method but the output power is more fluctuate than the proposed method. In
Figure 15f, the torque difference of the PMSG can be reduced significantly by the proposed method as compared with the conventional method and the fuzzy controller method. The torque difference is much higher than the previous case as shown in
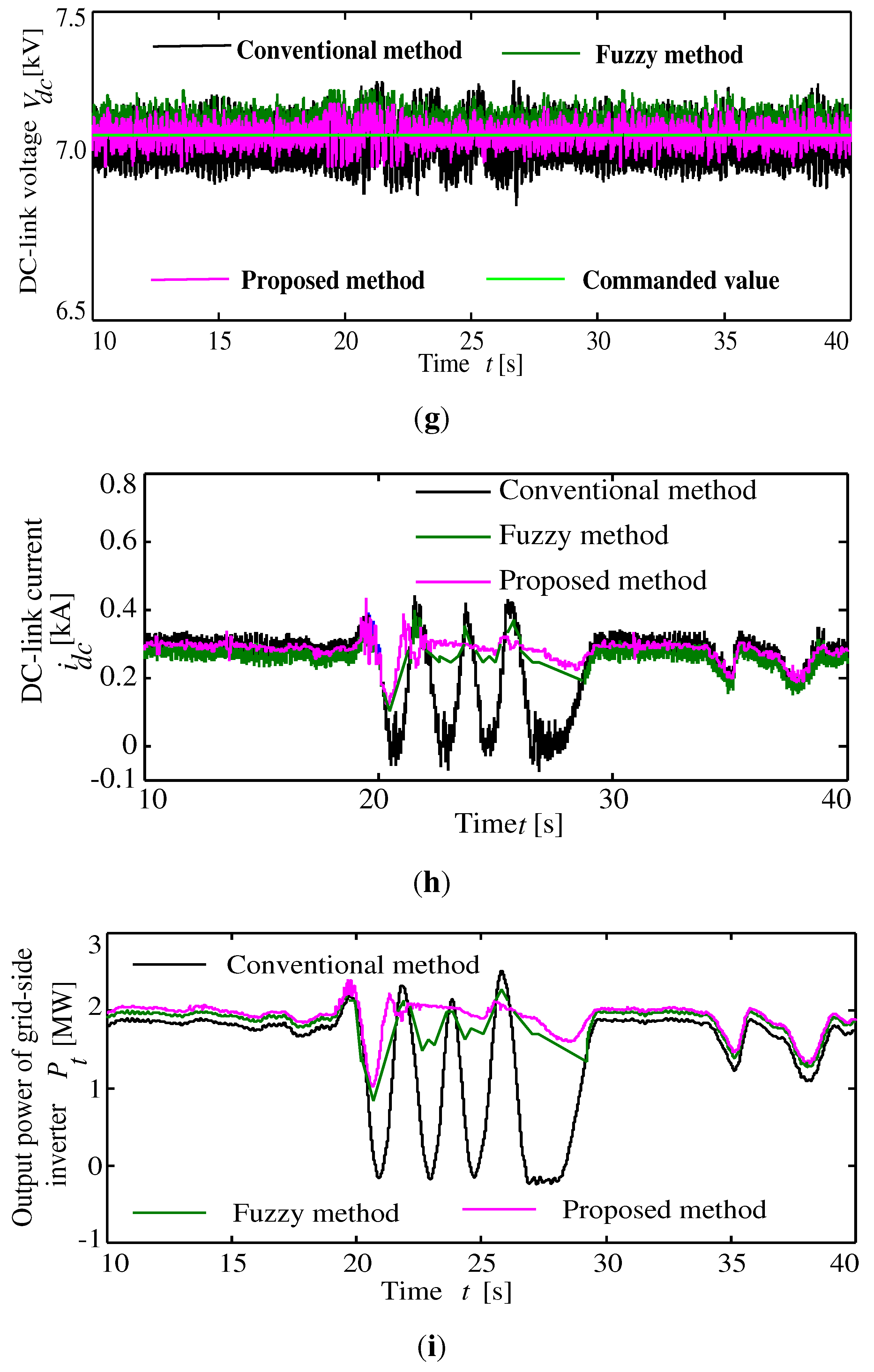
Figure 14d. As a result, the proposed method can prevent the shaft stress and the damage of the WECS. High frequency components of the DC-link voltage and current are decreased extensively by the proposed method (
Figure 15g,h). So, it can reduce size and stress of the DC-link capacitor. As a consequent, it can increase the life time of the capacitor. The output power of the grid-side inverter is depicted in
Figure 15i. From this figure, the proposed method ensures the system power stability and delivers an efficient output power to the power grid. The proposed shows the better performance as compared with another two methods. The fuzzy controller method can generate more stable power as compared with the conventional PI controller method but worse than the proposed method.
Figure 15.
Simulation Results (high turbulence wind speed). (a) Wind speed; (b) Pitch angle; (c) q-axis voltage command; (d) d-axis voltage command; (e) Output power of PMSG; (f) Torque difference; (g) DC-link voltage; (h) DC-link current; (i) Output power of grid-side inverter.
Figure 15.
Simulation Results (high turbulence wind speed). (a) Wind speed; (b) Pitch angle; (c) q-axis voltage command; (d) d-axis voltage command; (e) Output power of PMSG; (f) Torque difference; (g) DC-link voltage; (h) DC-link current; (i) Output power of grid-side inverter.
5.3. Robustness of the Proposed Controller
The external inputs (current references) and disturbances (decoupling components),
w are may vary during the applications. To prove the robustness of the proposed
controller, these inputs are measured under 10% error of estimation. The simulation results are shown in
Figure 16.
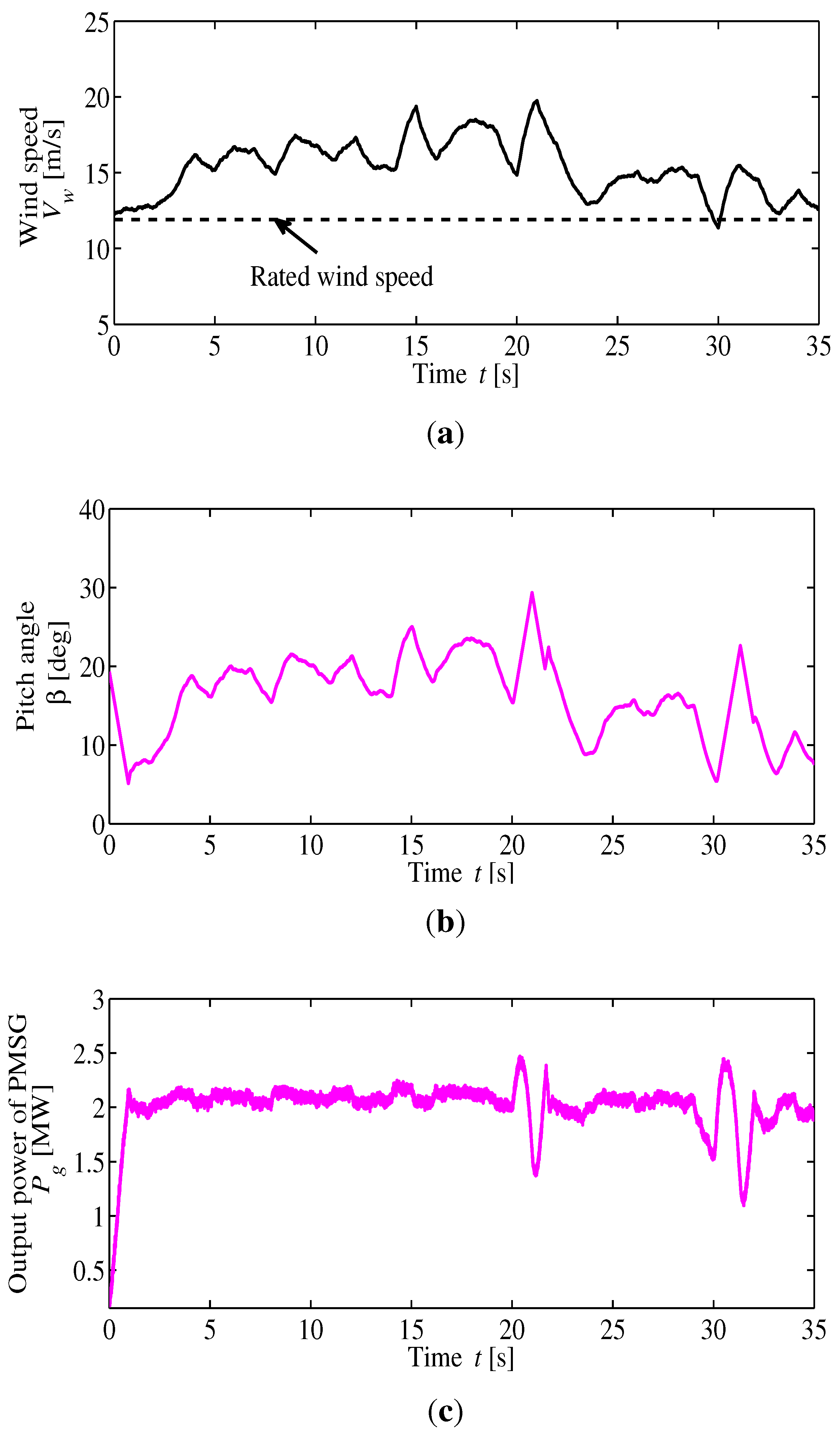
Figure 16a shows the wind speed. It is also a high turbulence wind speed. The pitch angle of the WECS is shown in
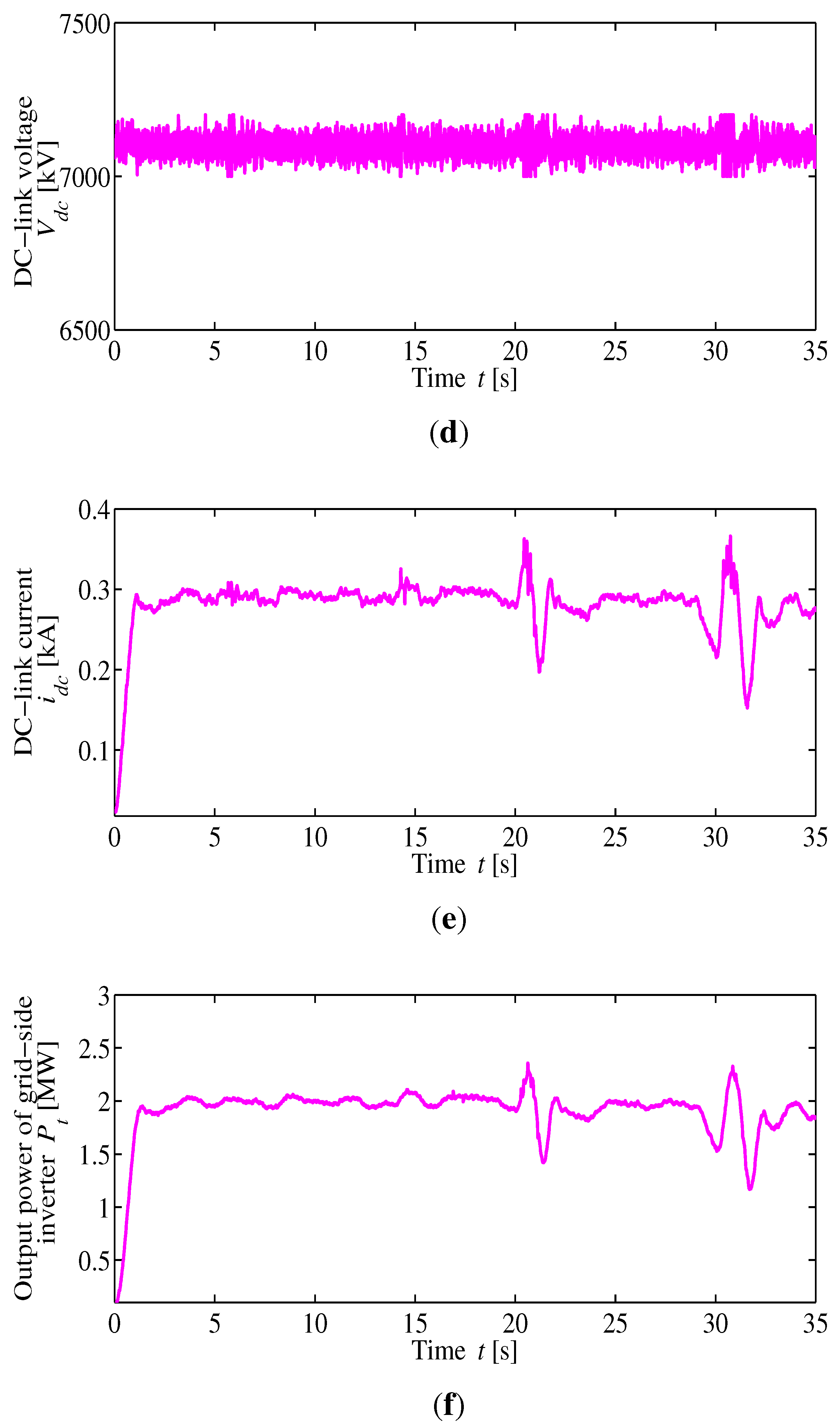
Figure 16b. The output power of the PMSG, DC-link voltage and DC-link current are shown in
Figure 16c–e respectively. All simulation results show a good behavior. The output power of the grid-side inverter is shown in
Figure 16f which also shows good behavior. On the other hand, simulation results show from the time 0s which includes the transient region of the wind turbine generation system. From the simulation results, the controller performances at transient regions are perfect.
Figure 16.
Simulation Results (Robustness of the proposed system). (a) Wind speed; (b) Pitch angle; (c) Output power of PMSG; (d) DC-link voltage; (e) DC-link current; (f) Output power of grid-side inverter.
Figure 16.
Simulation Results (Robustness of the proposed system). (a) Wind speed; (b) Pitch angle; (c) Output power of PMSG; (d) DC-link voltage; (e) DC-link current; (f) Output power of grid-side inverter.
From the above three different analyses, it is confirmed that when the wind speed becomes much higher than the rated speed, the conventional PI controller cannot control the large current and voltage accurately. The fuzzy controller requires additional adjustment for different levels of wind speeds. But the fuzzy controller method can improve performances as compared with the conventional PI controller method. The proposed digital robust controller can control the WECS perfectly any types of wind speeds.


 and
and 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










