
Study of Rolling Motion of Ships in Random Beam Seas with Nonlinear Restoring Moment and Damping Effects Using Neuroevolutionary Technique

 ,
,  , , and
, , and
Abstract
:1. Introduction
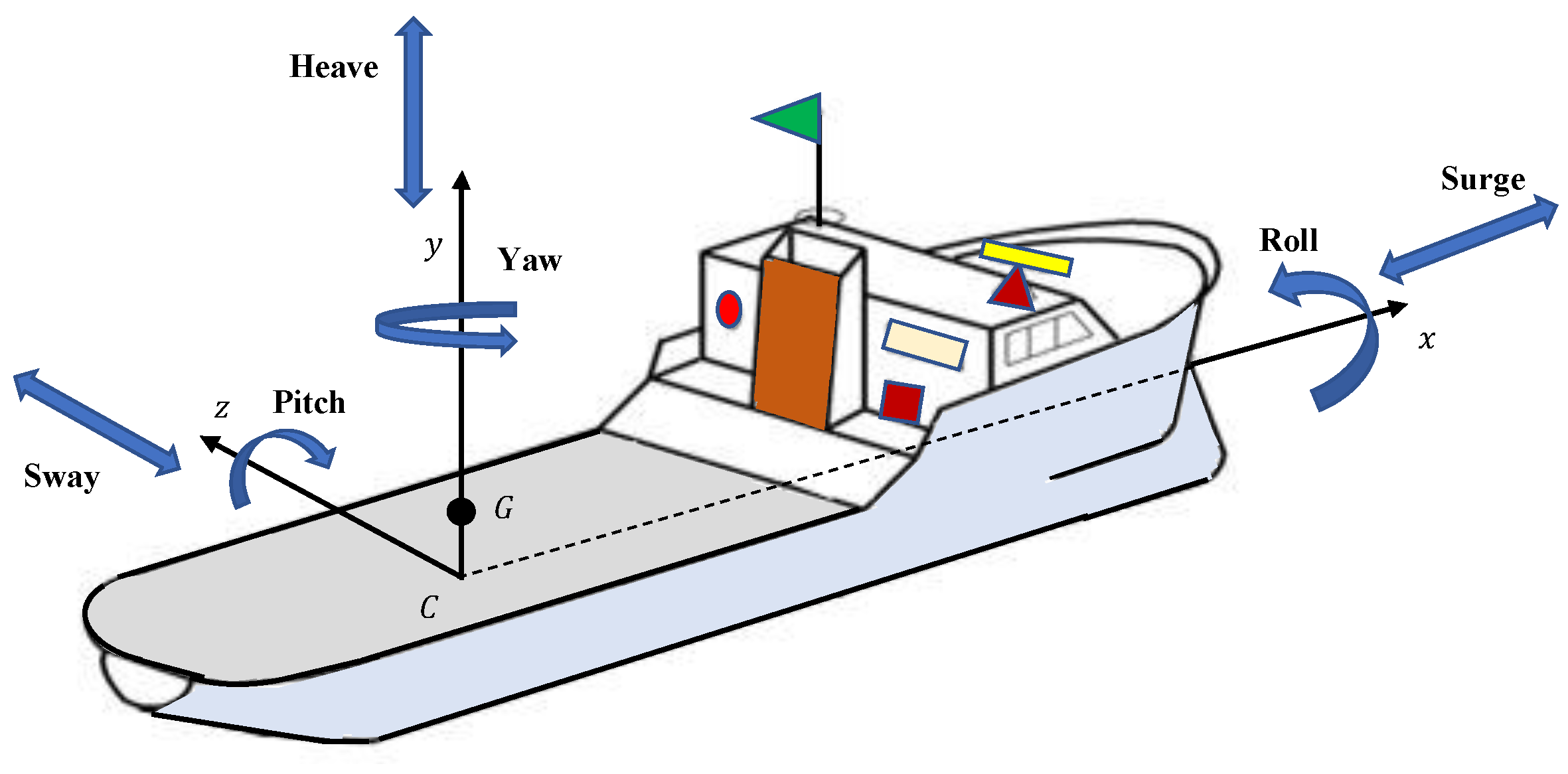
- The formulation of a mathematical model for the rolling motion of ships in random beam seas will have been investigated;
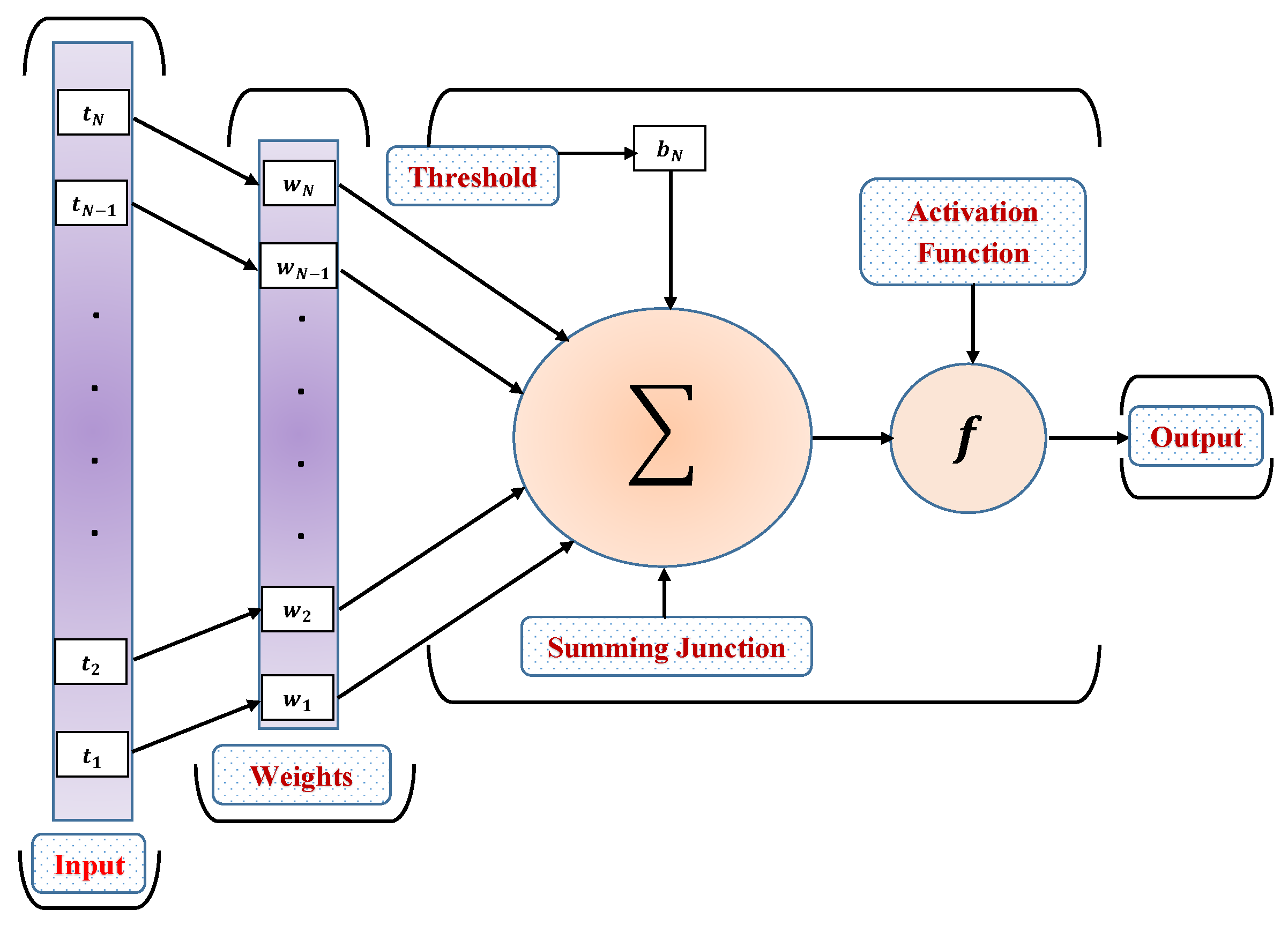
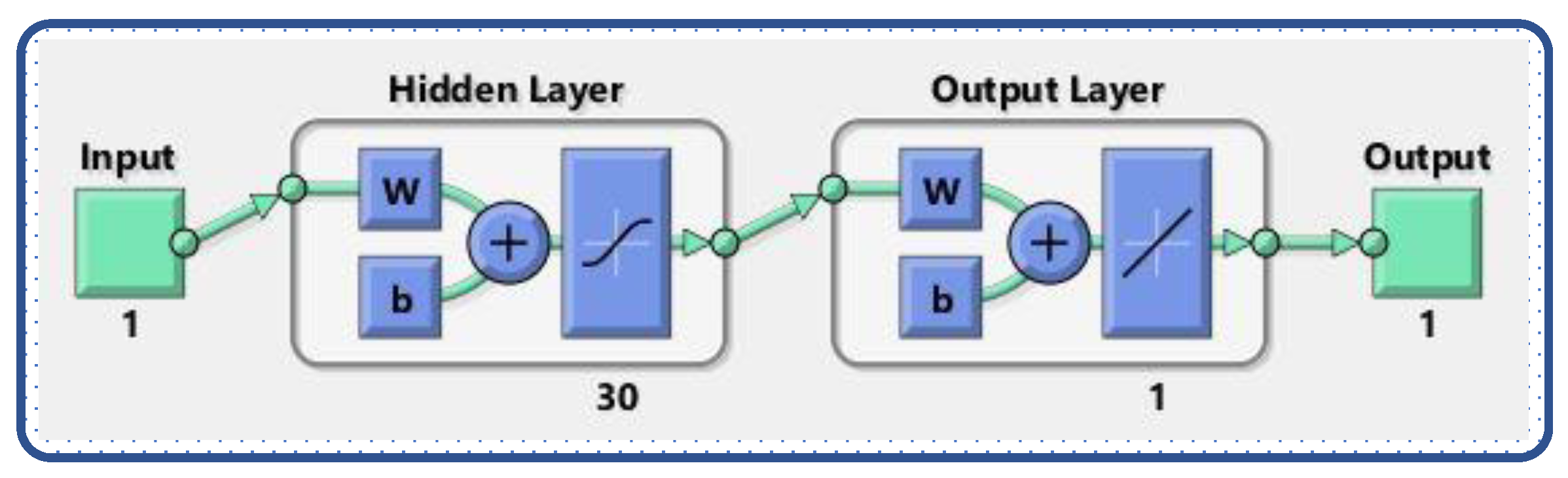
- The novel, integrated design of a computing paradigm based on the two-layer structure of the Levenberg-Marquardt (LM) algorithm and neural networks (LM-NNs) is presented to examine the rolling motions;
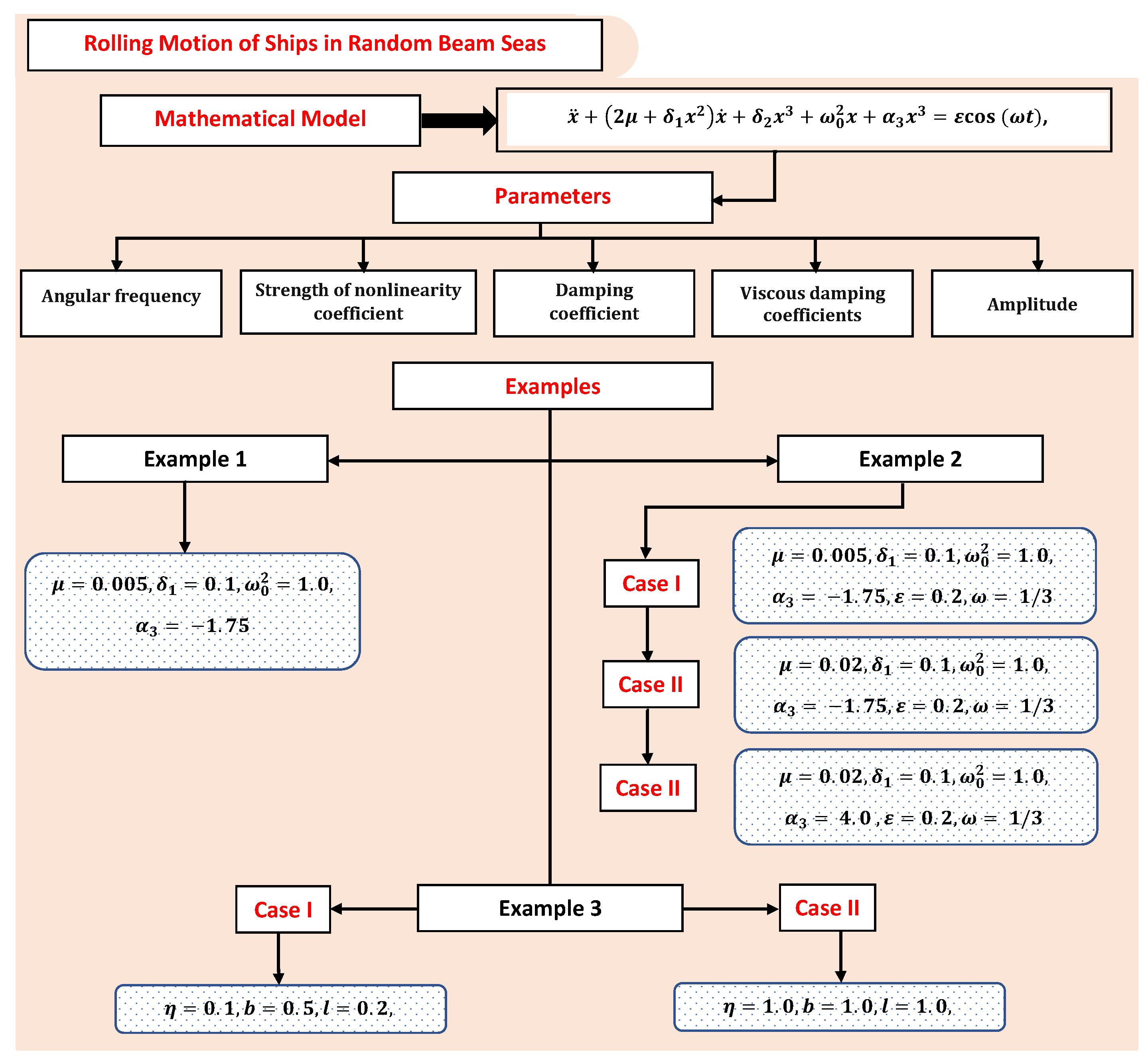
- The model is briefly analyzed by considering certain examples depending on variations in angular frequency , damping coefficient , frequency , amplitude , and strength of nonlinearity coefficient ;
- A merit function based on the mean square error is effectively developed for the computational analysis of LM-NNs by taking reference solutions of different examples generated by the RK-4 method;
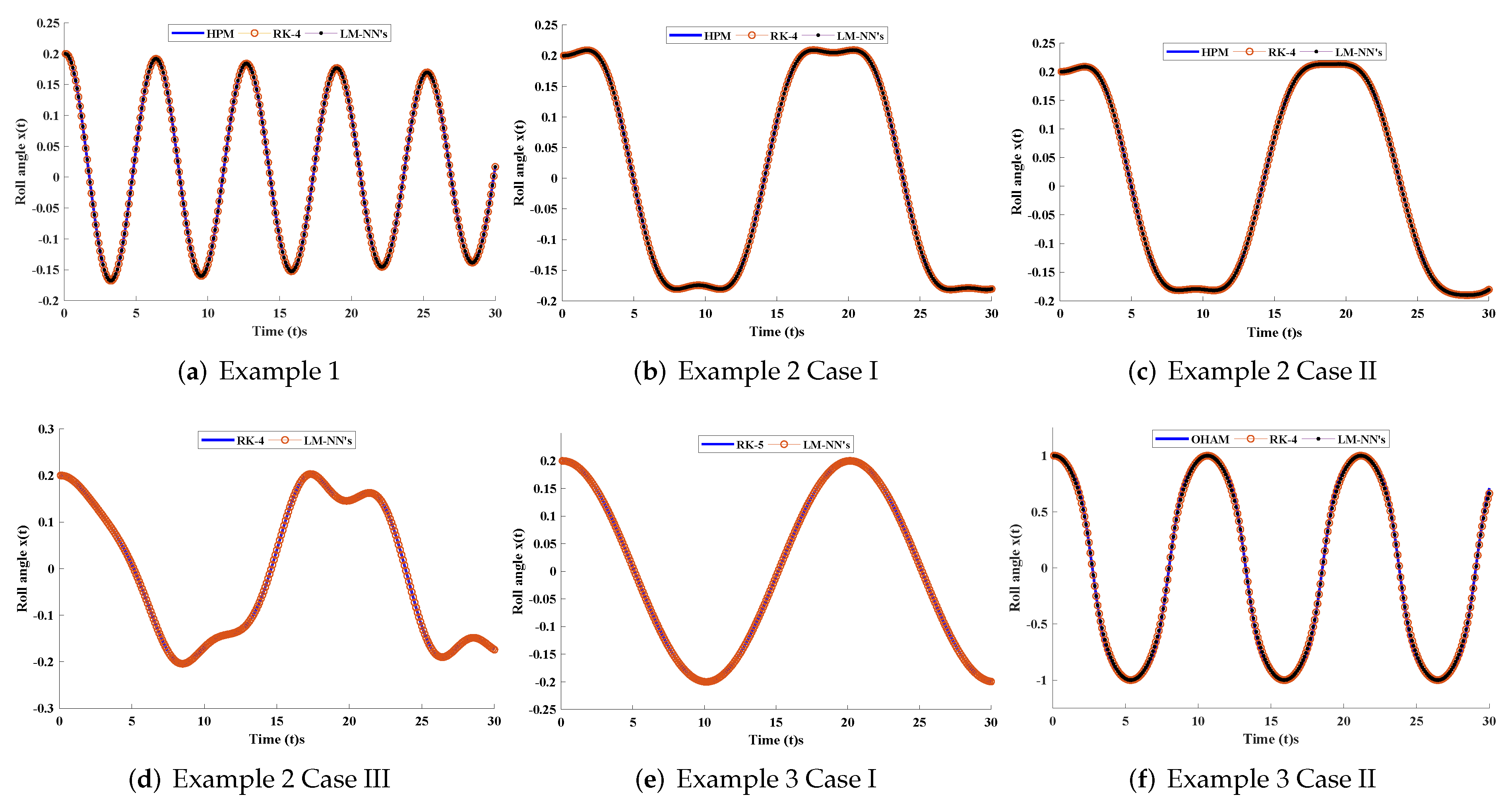
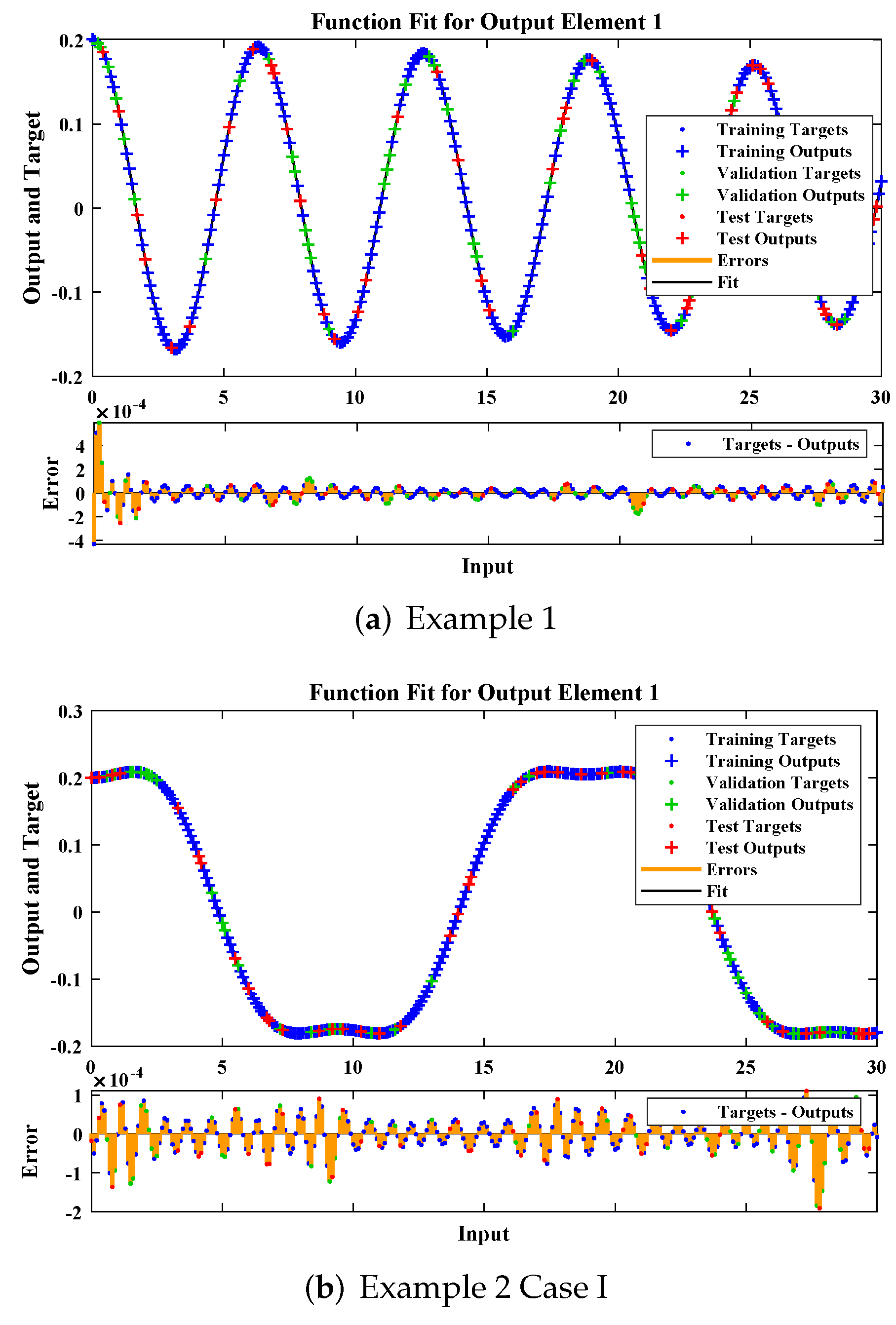
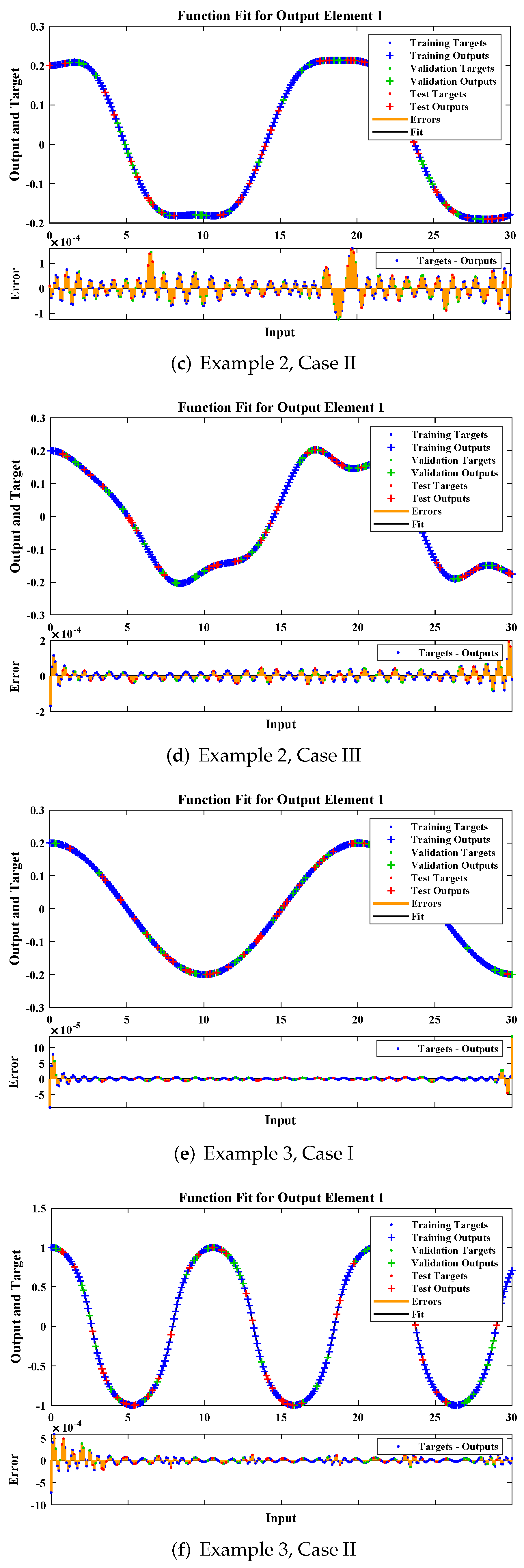
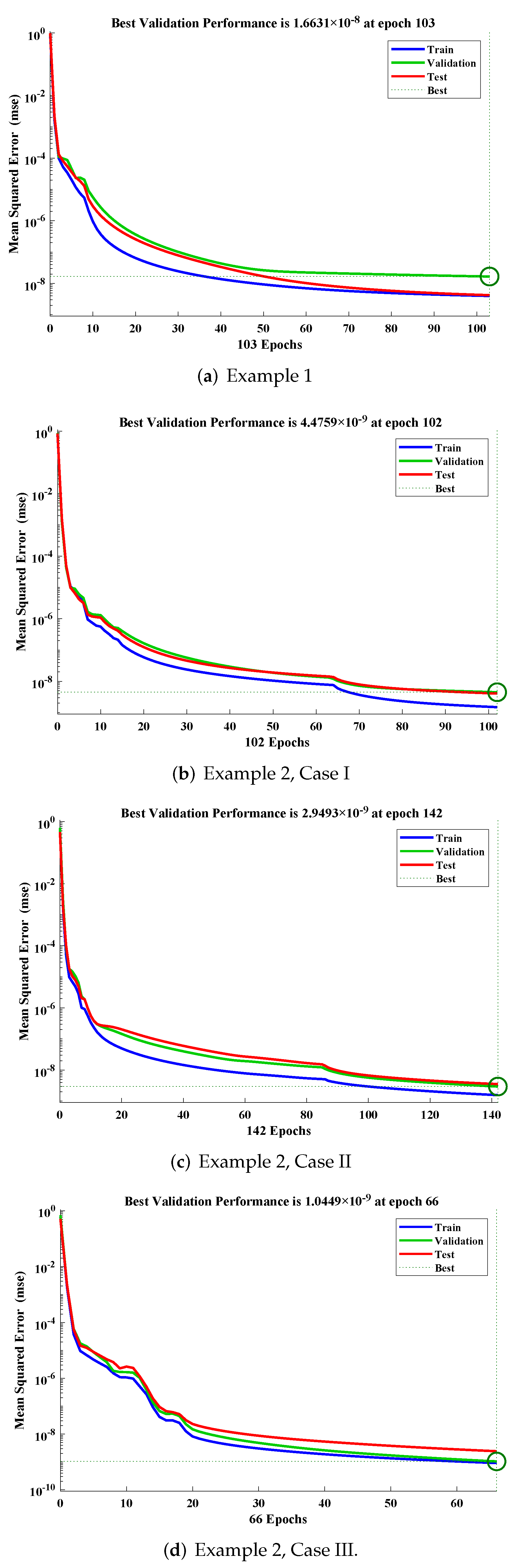
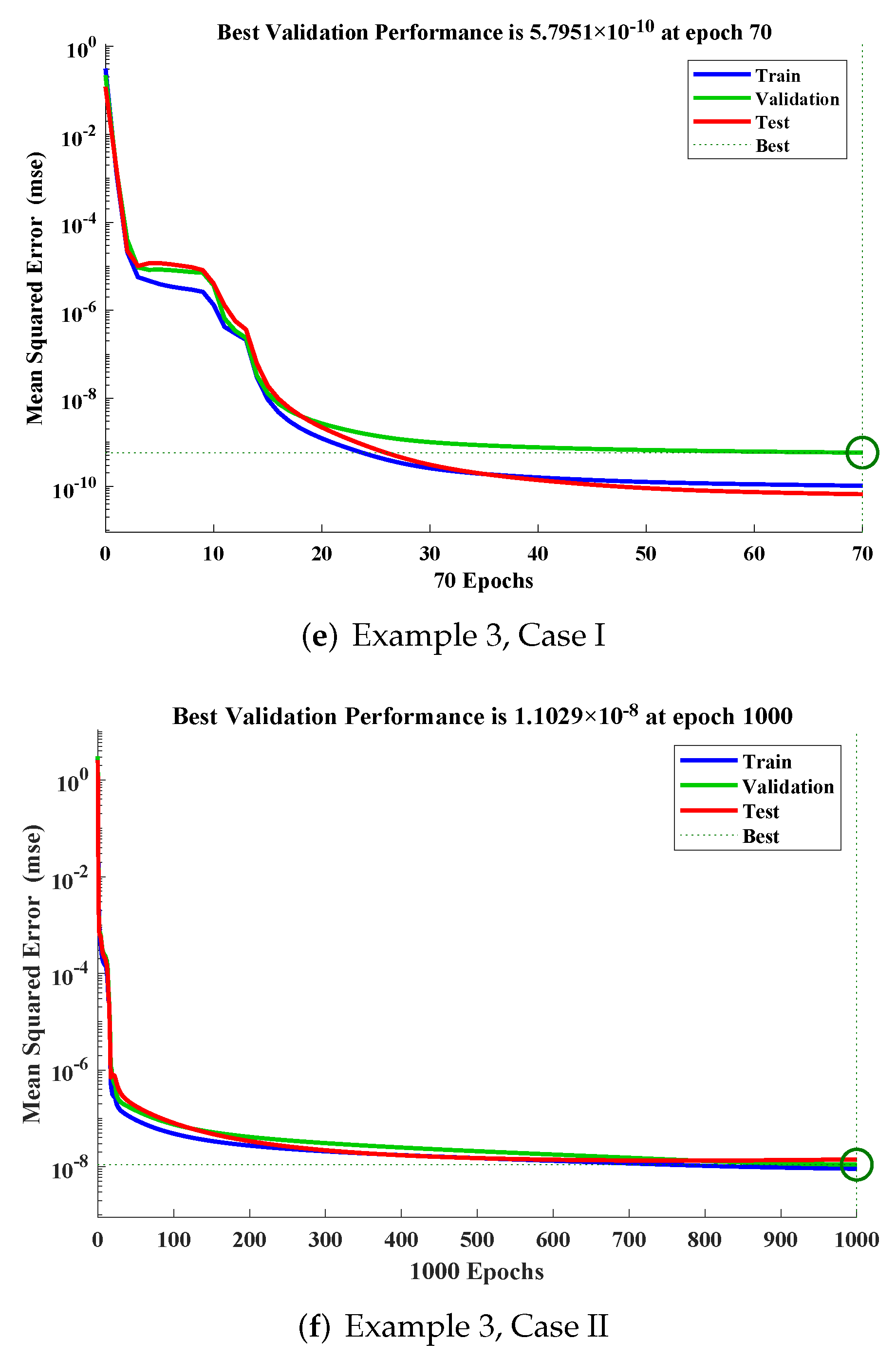
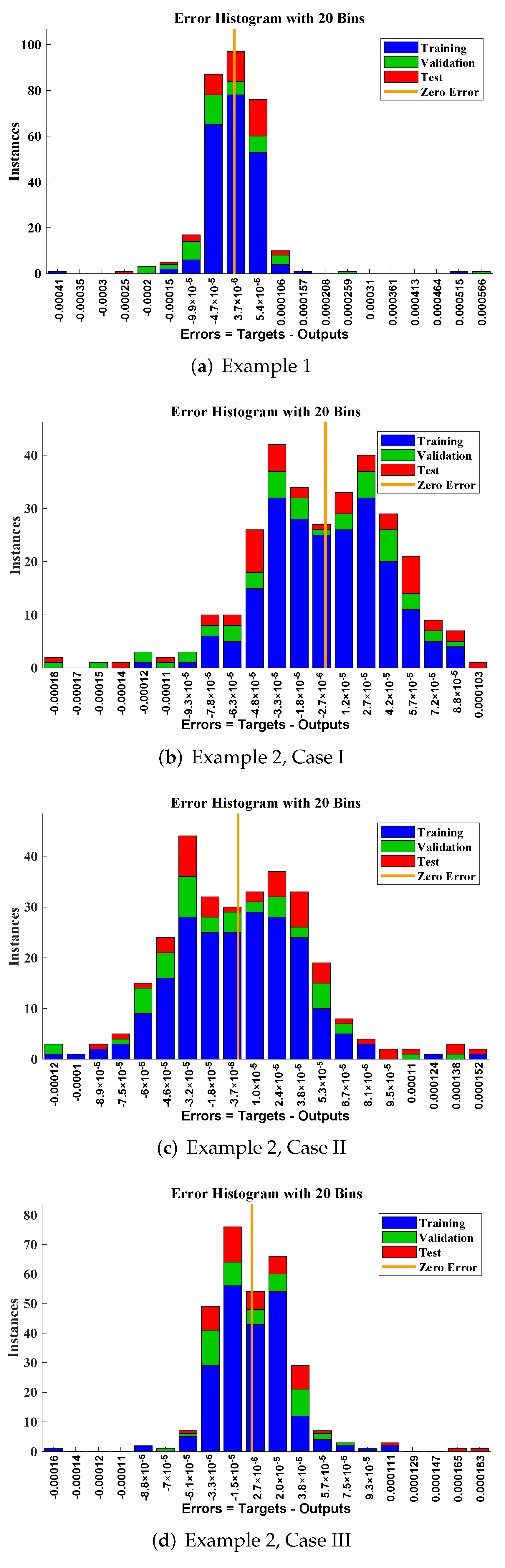
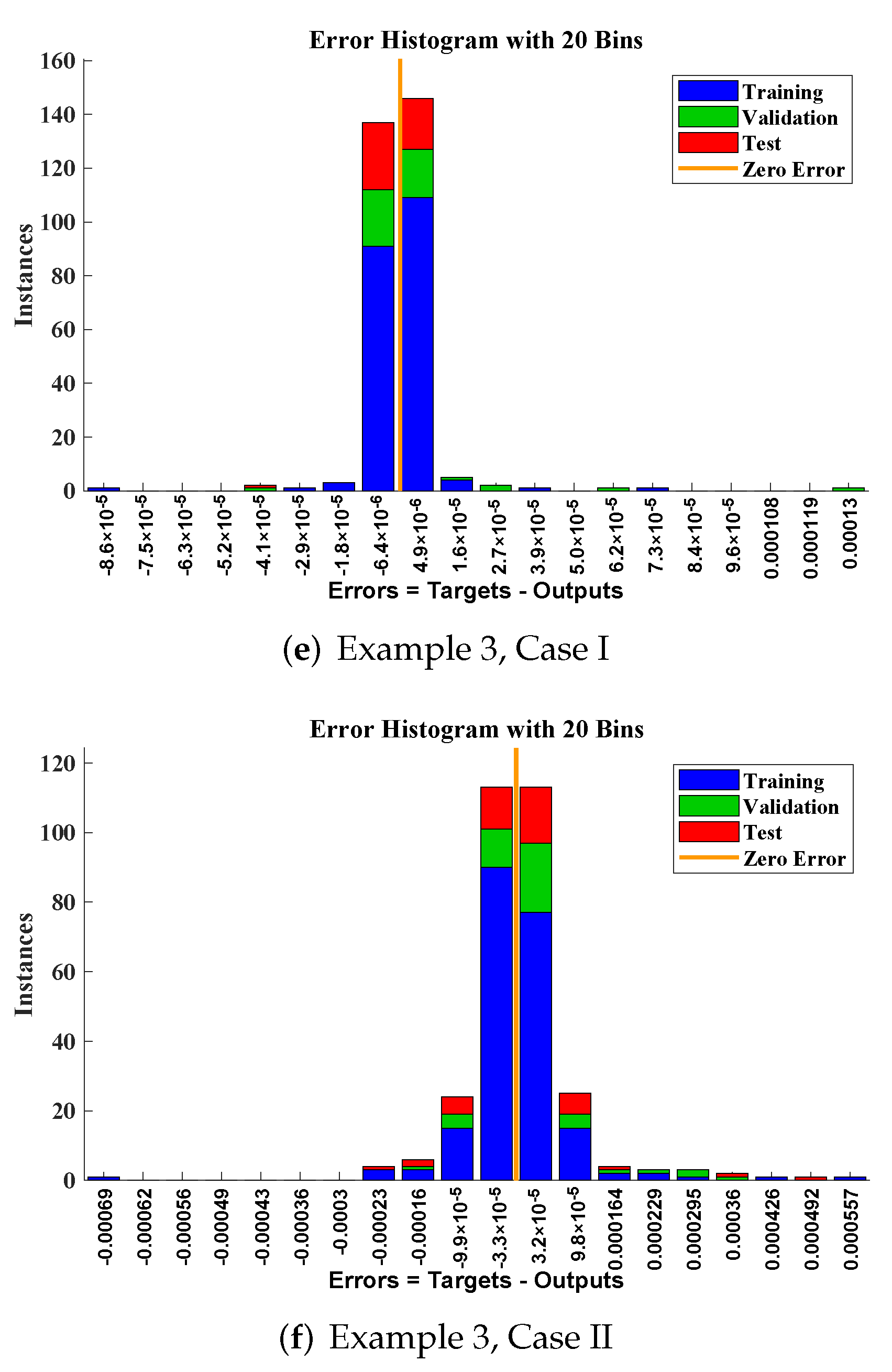
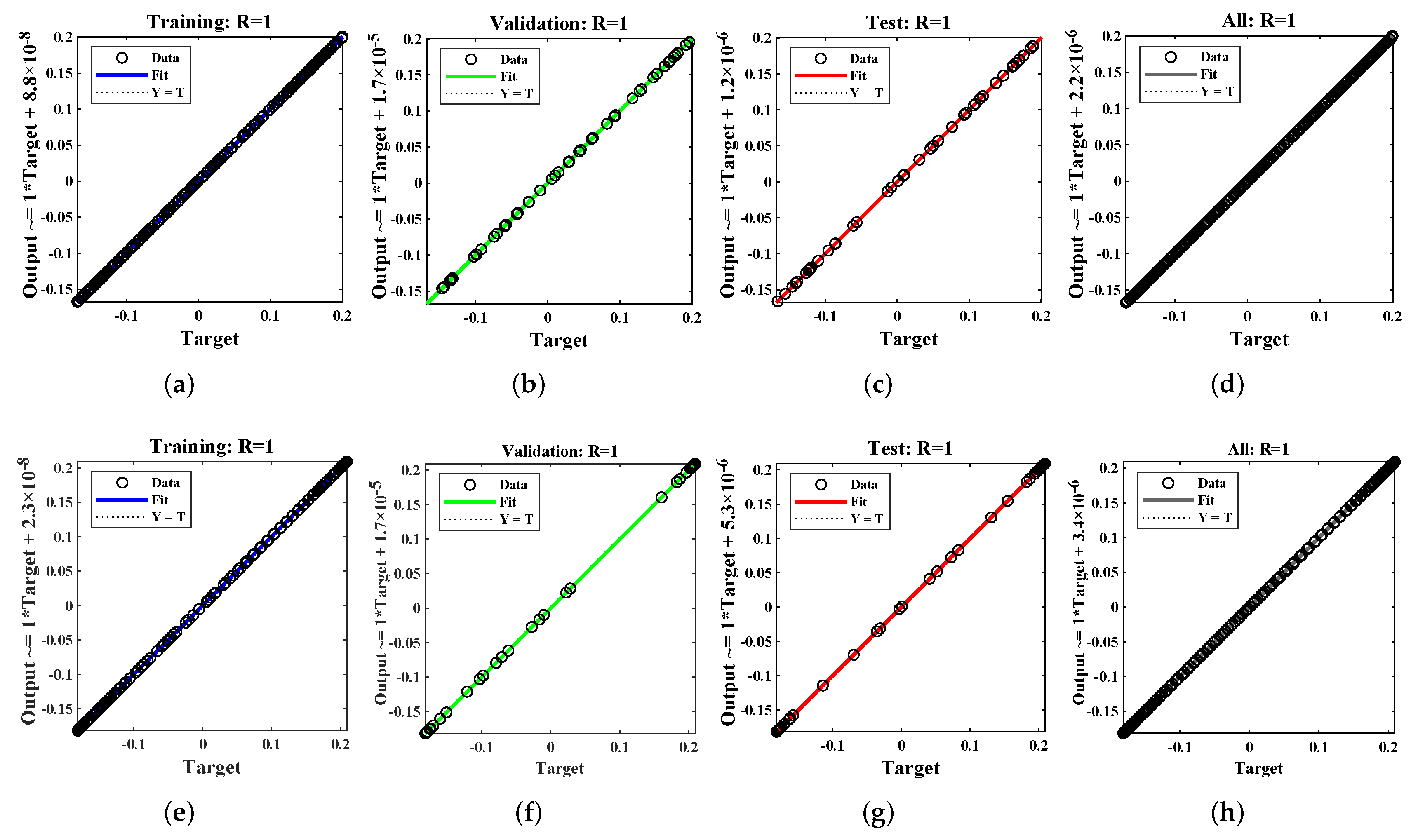
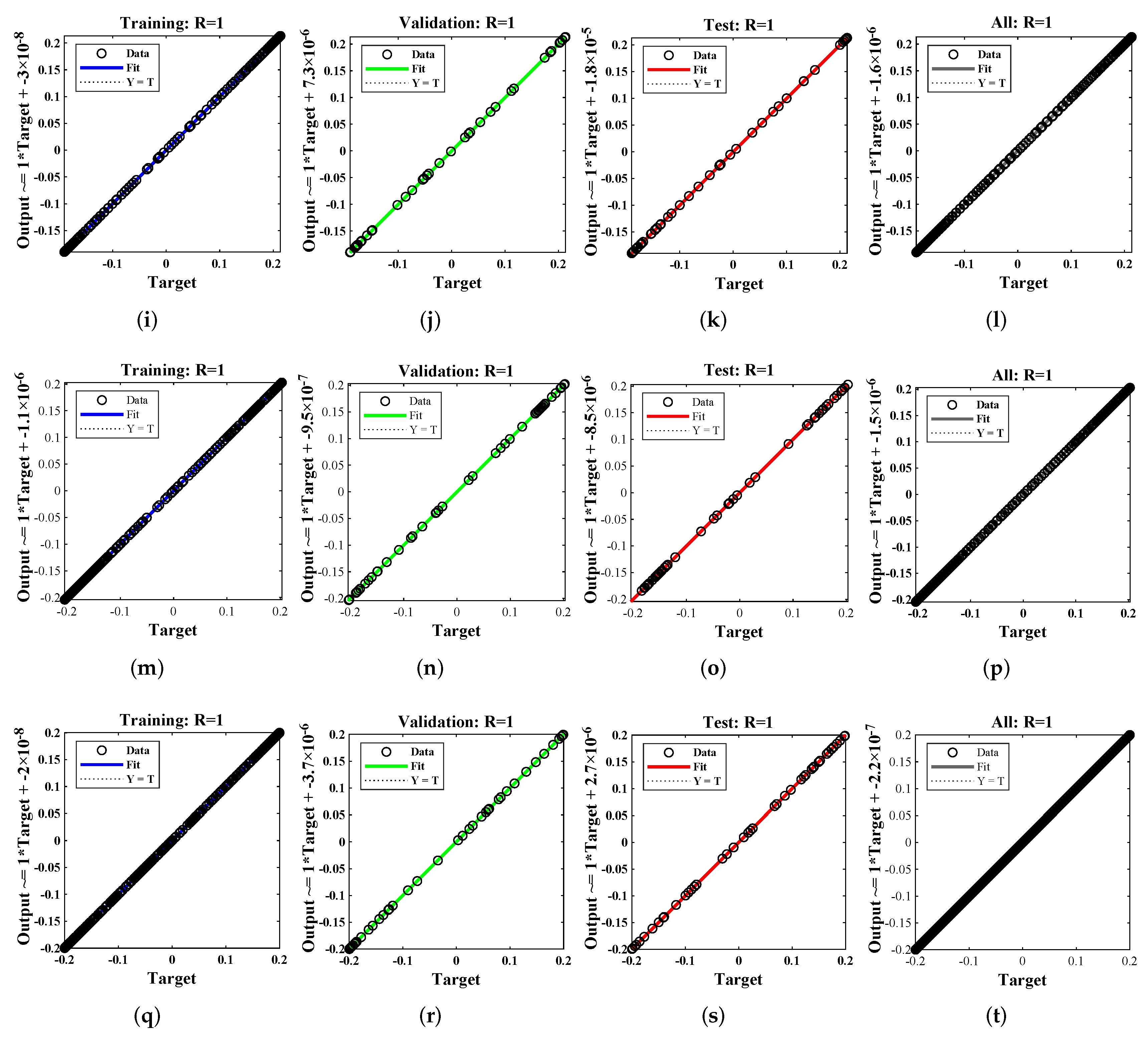
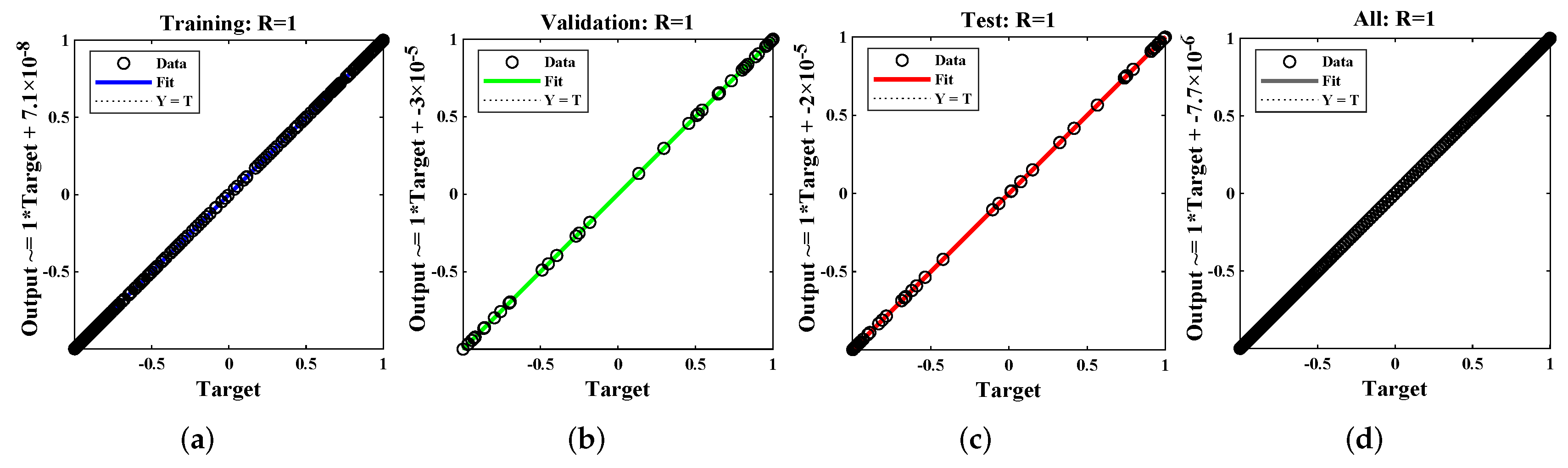
- The training, testing, and validation process of LM-NNs are utilized to study the performance of approximate solutions by graphically illustrating regressions, absolute errors, and error histograms. The results of LM-NNs are compared with those of the HPM and RK-4 methods, which shows the dominance of the technique;
- An advantage of the proposed design is that it does not require any initial parameter settings. Its implementation is simple and smooth, with exhaustive applicability and stability.
2. Problem Formulation
3. Proposed Methodology and Performance Indices
3.1. Structure of Artificial Neural Networks
3.2. Learning Procedure
4. Numerical Experimentation
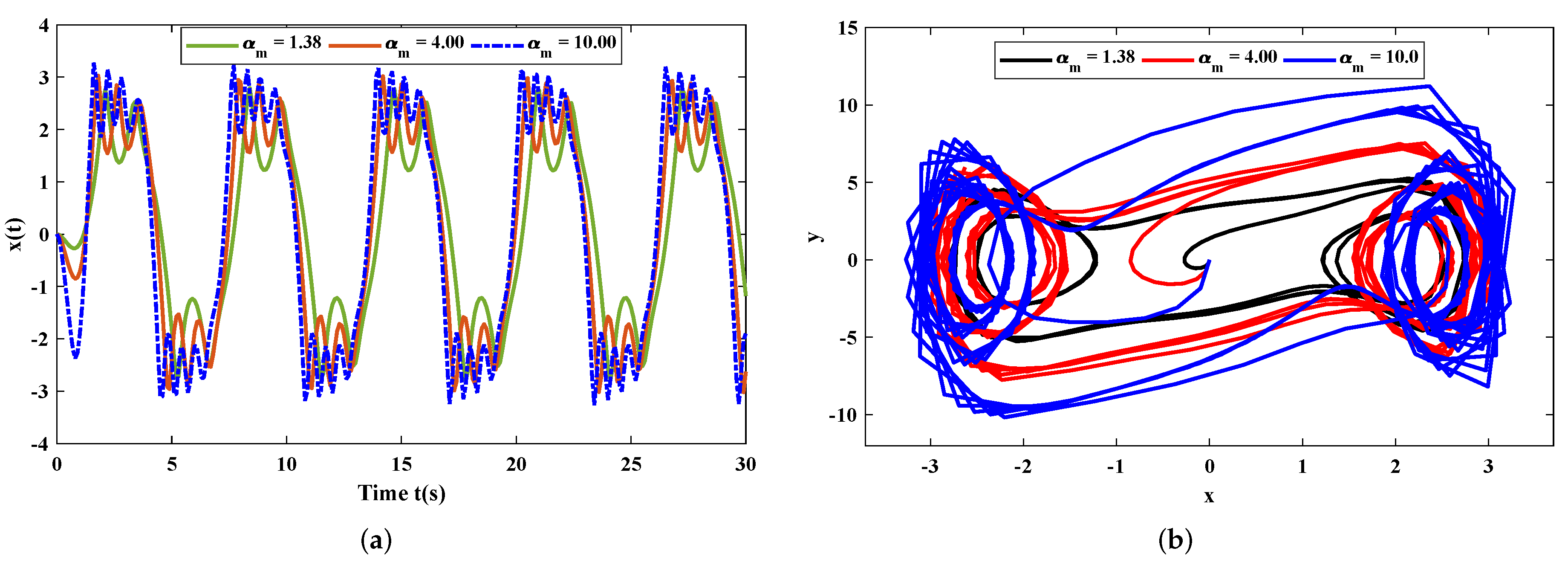
Chaos Phenomena of Ship Nonlinear Rolling Motion
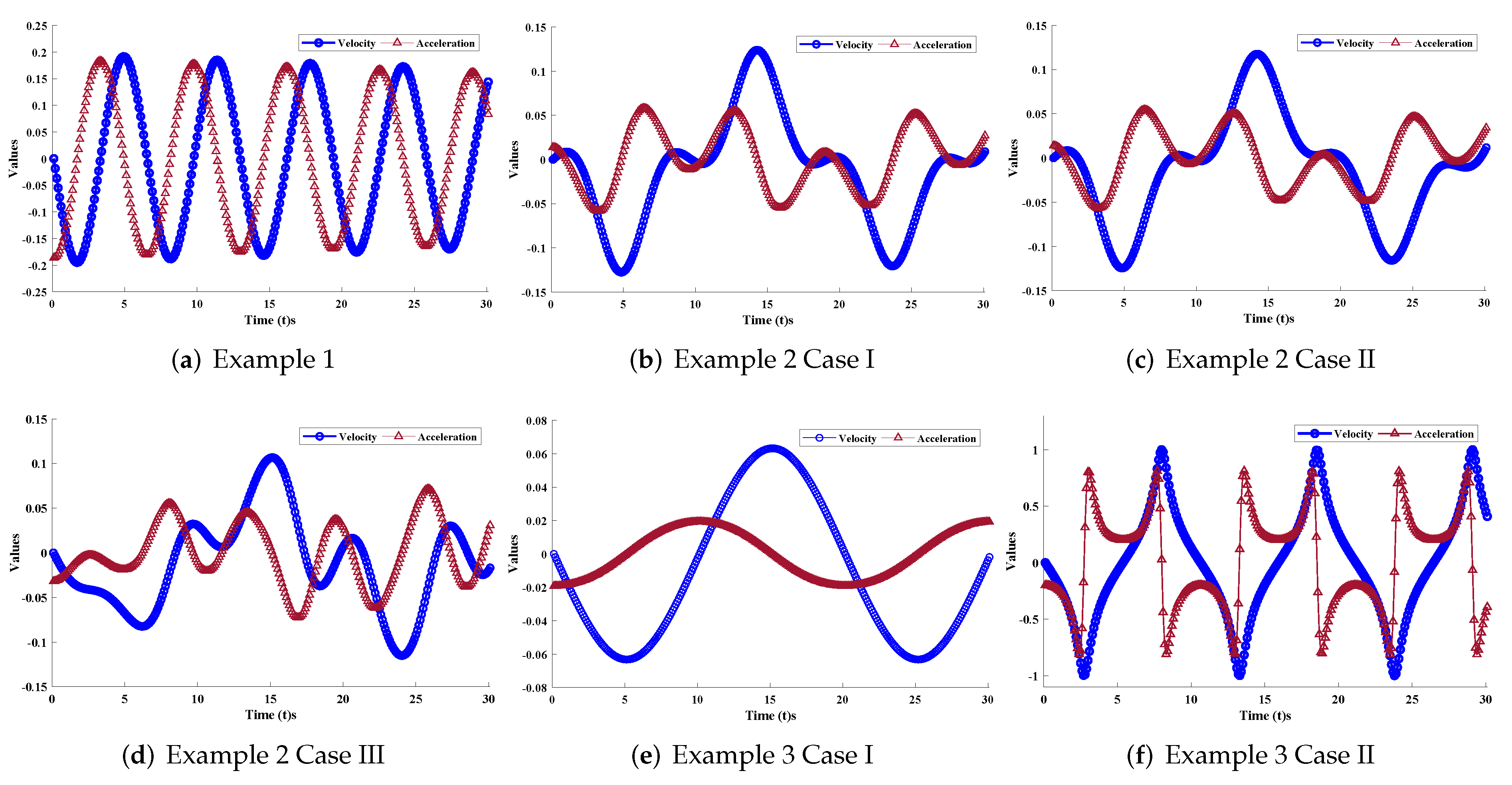
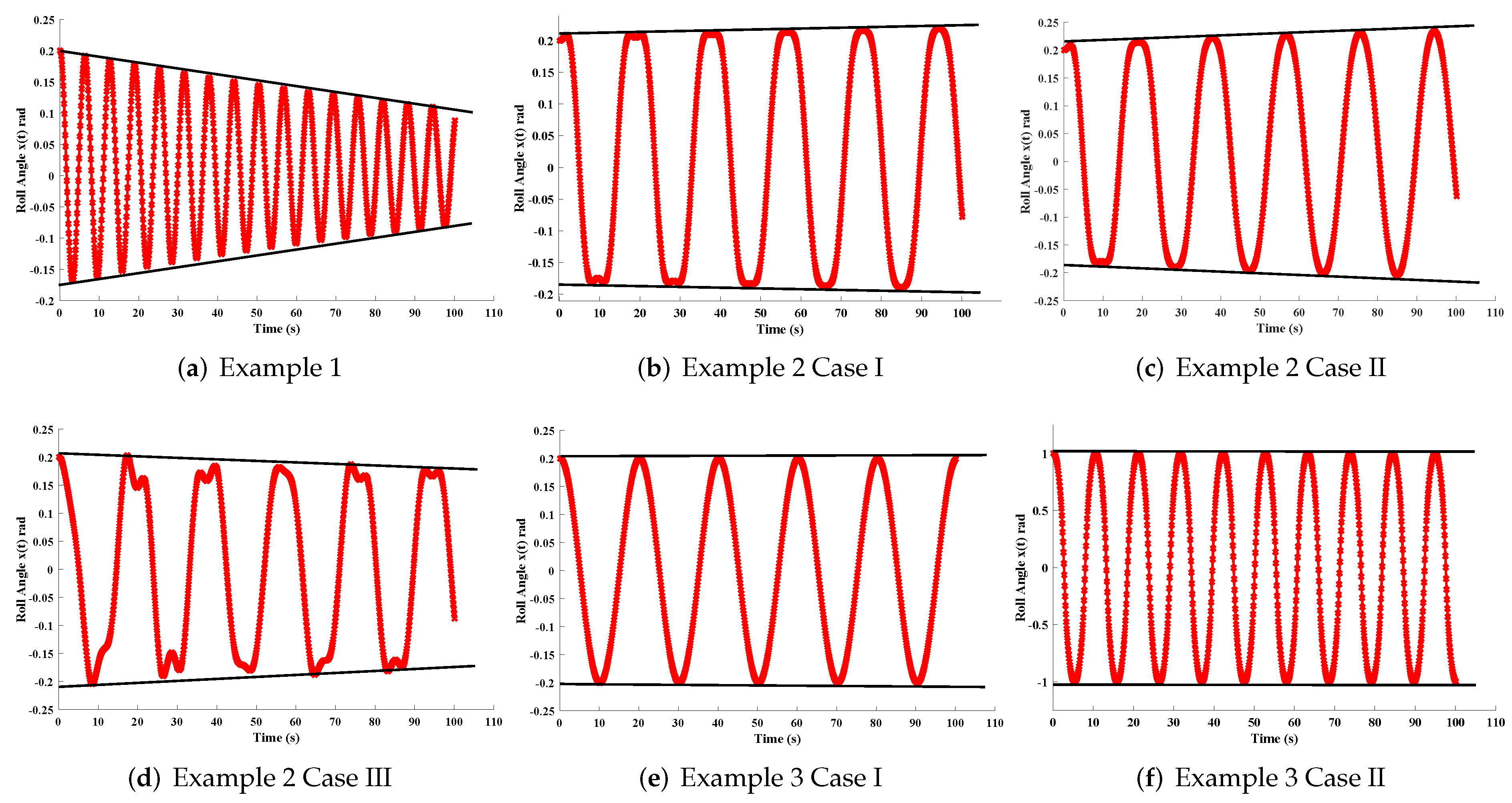
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tanaka, N. A Study on the Bilge Keels. J. Zosen Kiokai 1961, 1961, 205–212. [Google Scholar] [CrossRef] [Green Version]
- Himeno, Y. Prediction of Ship Roll Damping—A State of the Art 1981. Available online: https://deepblue.lib.umich.edu/handle/2027.42/91699 (accessed on 20 June 2021).
- Ikeda, Y.; Ali, B.; Yoshida, H. A roll damping prediction method for a FPSO with steady drift motion. In Proceedings of the Fourteenth International Offshore and Polar Engineering Conference, Toulon, France, 23–28 May 2004. [Google Scholar]
- Yeung, R.; Cermelli, C.; Liao, S. Vorticity fields due to rolling bodies in a free surface—Experiment and theory. In Proceedings of the 21st Symposium on Naval Hydrodynamics, Trondheim, Norway, 24–28 June 1996. [Google Scholar]
- Bassler, C.C.; Carneal, J.B.; Atsavapranee, P. Experimental investigation of hydrodynamic coefficients of a wave-piercing tumblehome hull form. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; Volume 42703, pp. 537–548. [Google Scholar]
- De Oliveira, A.C.; Fernandes, A.C. An empirical nonlinear model to estimate FPSO with extended bilge keel roll linear equivalent damping in extreme seas. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; Volume 44915, pp. 413–428. [Google Scholar]
- Aloisio, G.; Felice, F. PIV analysis around the bilge keel of a ship model in free roll decay. Convegno Naz. AI VE LA 2006, 14, 1–11. [Google Scholar]
- Lihua, L.; Peng, Z.; Songtao, Z.; Ming, J.; Jia, Y. Simulation analysis of fin stabilizer on ship roll control during turning motion. Ocean. Eng. 2018, 164, 733–748. [Google Scholar] [CrossRef]
- De Oliveira, A.C.; Carlos Fernandes, A. The nonlinear roll damping of a FPSO hull. J. Offshore Mech. Arct. Eng. 2014, 136, 011106. [Google Scholar] [CrossRef]
- Agarwal, D. A Study on the Feasibility of Using Fractional Differential Equations for Roll Damping Models. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2015. [Google Scholar]
- Comini, G.; Del Guidice, S.; Lewis, R.; Zienkiewicz, O. Finite element solution of non-linear heat conduction problems with special reference to phase change. Int. J. Numer. Methods Eng. 1974, 8, 613–624. [Google Scholar] [CrossRef]
- Chen, C.; Liu, Y. Solution of two-point boundary-value problems using the differential transformation method. J. Optim. Theory Appl. 1998, 99, 23–35. [Google Scholar] [CrossRef]
- Liao, S. Homotopy analysis method: A new analytical technique for nonlinear problems. Commun. Nonlinear Sci. Numer. Simul. 1997, 2, 95–100. [Google Scholar] [CrossRef]
- Liao, S.J.; Chwang, A. Application of homotopy analysis method in nonlinear oscillations. J. Appl. Mech. 1998, 65, 914–922. [Google Scholar] [CrossRef]
- Liao, S. On the homotopy analysis method for nonlinear problems. Appl. Math. Comput. 2004, 147, 499–513. [Google Scholar] [CrossRef]
- Lu, J. Variational iteration method for solving a nonlinear system of second-order boundary value problems. Comput. Math. Appl. 2007, 54, 1133–1138. [Google Scholar] [CrossRef] [Green Version]
- Abukhaled, M. Variational iteration method for nonlinear singular two-point boundary value problems arising in human physiology. J. Math. 2013, 2013, 1–4. [Google Scholar] [CrossRef] [Green Version]
- He, J. Comput Methods Appl. Mech. Engrg. 1999, 178, 257. [Google Scholar]
- Selvi, M.S.M.; Rajendran, L.; Abukhaled, M. Estimation of Rolling Motion of Ship in Random Beam Seas by Efficient Analytical and Numerical Approaches. J. Mar. Sci. Appl. 2021, 20, 1–12. [Google Scholar] [CrossRef]
- Abukhaled, M.; Khuri, S. A semi-analytical solution of amperometric enzymatic reactions based on Green’s functions and fixed point iterative schemes. J. Electroanal. Chem. 2017, 792, 66–71. [Google Scholar] [CrossRef]
- Salomi, R.J.; Sylvia, S.V.; Rajendran, L.; Abukhaled, M. Electric potential and surface oxygen ion density for planar, spherical and cylindrical metal oxide grains. Sens. Actuators B Chem. 2020, 321, 128576. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Kumam, P.; Aljohani, A.J. A new soft computing approach for studying the wire coating dynamics with Oldroyd 8-constant fluid. Phys. Fluids 2021, 33, 036117. [Google Scholar] [CrossRef]
- Ali, A.; Qadri, S.; Khan Mashwani, W.; Kumam, W.; Kumam, P.; Naeem, S.; Goktas, A.; Jamal, F.; Chesneau, C.; Anam, S.; et al. Machine learning based automated segmentation and hybrid feature analysis for diabetic retinopathy classification using fundus image. Entropy 2020, 22, 567. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Aljohani, A.J.; Kumam, P.; Alrabaiah, H. Analysis of Multi-Phase Flow Through Porous Media for Imbibition Phenomena by Using the LeNN-WOA-NM Algorithm. IEEE Access 2020, 8, 196425–196458. [Google Scholar] [CrossRef]
- Khan, N.A.; Khalaf, O.I.; Romero, C.A.T.; Sulaiman, M.; Bakar, M.A. Application of Euler Neural Networks with Soft Computing Paradigm to Solve Nonlinear Problems Arising in Heat Transfer. Entropy 2021, 23, 1053. [Google Scholar] [CrossRef]
- Ahmad, A.; Sulaiman, M.; Alhindi, A.; Aljohani, A.J. Analysis of temperature profiles in longitudinal fin designs by a novel neuroevolutionary approach. IEEE Access 2020, 8, 113285–113308. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Kumam, P.; Bakar, M.A. Thermal analysis of conductive-convective-radiative heat exchangers with temperature dependent thermal conductivity. IEEE Access 2021, 9, 138876–138902. [Google Scholar] [CrossRef]
- Huang, W.; Jiang, T.; Zhang, X.; Khan, N.A.; Sulaiman, M. Analysis of Beam-Column Designs by Varying Axial Load with Internal Forces and Bending Rigidity Using a New Soft Computing Technique. Complexity 2021, 2021. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Tavera Romero, C.A.; Alarfaj, F.K. Theoretical Analysis on Absorption of Carbon Dioxide (CO2) into Solutions of Phenyl Glycidyl Ether (PGE) Using Nonlinear Autoregressive Exogenous Neural Networks. Molecules 2021, 26, 6041. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Aljohani, A.J.; Bakar, M.A.; Miftahuddine. Mathematical models of CBSC over wireless channels and their analysis by using the LeNN-WOA-NM algorithm. Eng. Appl. Artif. Intell. 2022, 107, 104537. [Google Scholar] [CrossRef]
- Khan, N.A.; Alshammari, F.S.; Romero, C.A.T.; Sulaiman, M.; Laouini, G. Mathematical Analysis of Reaction–Diffusion Equations Modeling the Michaelis–Menten Kinetics in a Micro-Disk Biosensor. Molecules 2021, 26, 7310. [Google Scholar] [CrossRef]
- Waseem, W.; Sulaiman, M.; Alhindi, A.; Alhakami, H. A soft computing approach based on fractional order DPSO algorithm designed to solve the corneal model for eye surgery. IEEE Access 2020, 8, 61576–61592. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Tavera Romero, C.A.; Alarfaj, F.K. Numerical Analysis of Electrohydrodynamic Flow in a Circular Cylindrical Conduit by Using Neuro Evolutionary Technique. Energies 2021, 14, 7774. [Google Scholar] [CrossRef]
- Cardo, A.; Francescutto, A.; Nabergoj, R. Ultraharmonics and subharmonics in the rolling motion of a ship: Steady-state solution. Int. Shipbuild. Prog. 1981, 28, 234–251. [Google Scholar] [CrossRef]
- Hasni, A.; Sehli, A.; Draoui, B.; Bassou, A.; Amieur, B. Estimating global solar radiation using artificial neural network and climate data in the south-western region of Algeria. Energy Procedia 2012, 18, 531–537. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, A.S.; Hassan, M.Y.; Abdullah, M.P.; Rahman, H.A.; Hussin, F.; Abdullah, H.; Saidur, R. A review on applications of ANN and SVM for building electrical energy consumption forecasting. Renew. Sustain. Energy Rev. 2014, 33, 102–109. [Google Scholar] [CrossRef]
- Ebrahim, O.S.; Badr, M.A.; Elgendy, A.S.; Jain, P.K. ANN-based optimal energy control of induction motor drive in pumping applications. IEEE Trans. Energy Convers. 2010, 25, 652–660. [Google Scholar] [CrossRef]
- Available online: https://www.mathworks.com/help/deeplearning/gs/fit-data-with-a-neural-network.html (accessed on 3 August 2021).
- Marinca, V.; Herişanu, N. Determination of periodic solutions for the motion of a particle on a rotating parabola by means of the optimal homotopy asymptotic method. J. Sound Vib. 2010, 329, 1450–1459. [Google Scholar] [CrossRef]
- Nayfeh, A.; Sanchez, N. Stability and complicated rolling responses of ships in regular beam seas. Int. Shipbuild. Prog. 1990, 37, 177–198. [Google Scholar]
- Pu, J.Y.; Liu, H.; Wu, X.J.; Chen, X.H. Experimental study in nonlinear rolling motion of a flooded ship. J. Ship Mech. 2011, 5, 2537–2553. [Google Scholar]
- Yu, Y.; Shenoi, R.A.; Zhu, H.; Xia, L. Using wavelet transforms to analyze nonlinear ship rolling and heave-roll coupling. Ocean. Eng. 2006, 33, 912–926. [Google Scholar] [CrossRef]
- Llibre, J.; Rodrigues, A. A non-autonomous kind of Duffing equation. Appl. Math. Comput. 2015, 251, 669–674. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |||||||
|---|---|---|---|---|---|---|---|
| Values | 3.24 | −4.525 | 0.878 | 0.35 | 0.0222 | 0.504 | −4.6656 |
| Example 1 | Example 2 | Example 3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Case I | Case II | Case III | Case I | Case II | |||||
| t | MHPM | Anaytical | LM-NN’s | OHAM | LM-NN’s | ||||
| 0 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 1 | 1 |
| 3 | −0.166120 | −0.191740 | −0.191730 | 0.176480 | 0.176568 | 0.109021 | 0.118817 | −0.338480 | −0.334040 |
| 6 | 0.184868 | 0.174917 | 0.174914 | −0.142790 | −0.136060 | −0.075050 | −0.061160 | −0.941280 | −0.945690 |
| 9 | −0.144550 | −0.150800 | −0.150820 | −0.205370 | −0.209320 | −0.196250 | −0.189810 | 0.775350 | 0.737937 |
| 12 | 0.157559 | 0.120891 | 0.120810 | −0.191980 | −0.190840 | −0.137690 | −0.163790 | 0.798647 | 0.767593 |
| 15 | −0.112290 | −0.086840 | −0.086850 | 0.097787 | 0.091824 | 0.050338 | −0.003150 | −0.931210 | −0.932550 |
| 18 | 0.121196 | 0.050406 | 0.050406 | 0.210881 | 0.210487 | 0.188166 | 0.160140 | −0.398350 | −0.395290 |
| 21 | −0.072730 | −0.013330 | −0.013320 | 0.202523 | 0.207454 | 0.160958 | 0.191669 | 0.999319 | 0.999335 |
| 24 | 0.079358 | −0.022720 | −0.022720 | −0.050090 | −0.050840 | −0.027350 | 0.067115 | −0.27570 | −0.267520 |
| 27 | −0.029550 | 0.056298 | 0.056296 | −0.210560 | −0.203030 | −0.179030 | −0.113730 | −0.950850 | −0.957320 |
| 30 | 0.035768 | −0.086160 | −0.086160 | −0.211550 | −0.221450 | −0.175970 | −0.199900 | 0.749124 | 0.705858 |
| Example 1 | Example 2 | Example 3 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case I | Case II | Case III | Case I | Case II | ||||||||
| t | ||||||||||||
| 3 | −0.04120 | 0.17996 | −0.05802 | −0.05804 | −0.05705 | −0.05641 | −0.04287 | −0.00438 | −0.05052 | −0.01202 | −0.78374 | 0.79843 |
| 9 | −0.11206 | 0.14617 | 0.00643 | −0.00788 | 0.00253 | −0.00484 | 0.02417 | 0.02742 | −0.01958 | 0.01839 | 0.37855 | −0.36528 |
| 18 | 0.17082 | −0.05193 | −0.00528 | −0.00236 | 0.00324 | −0.00228 | −0.03384 | −0.02131 | 0.03741 | −0.01583 | 0.72057 | 0.74845 |
| 27 | −0.16067 | −0.05433 | −0.00085 | 0.01201 | −0.00809 | 0.00652 | 0.02764 | 0.01857 | −0.05169 | 0.01152 | 0.13380 | 0.80846 |
| Mean Square Error | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
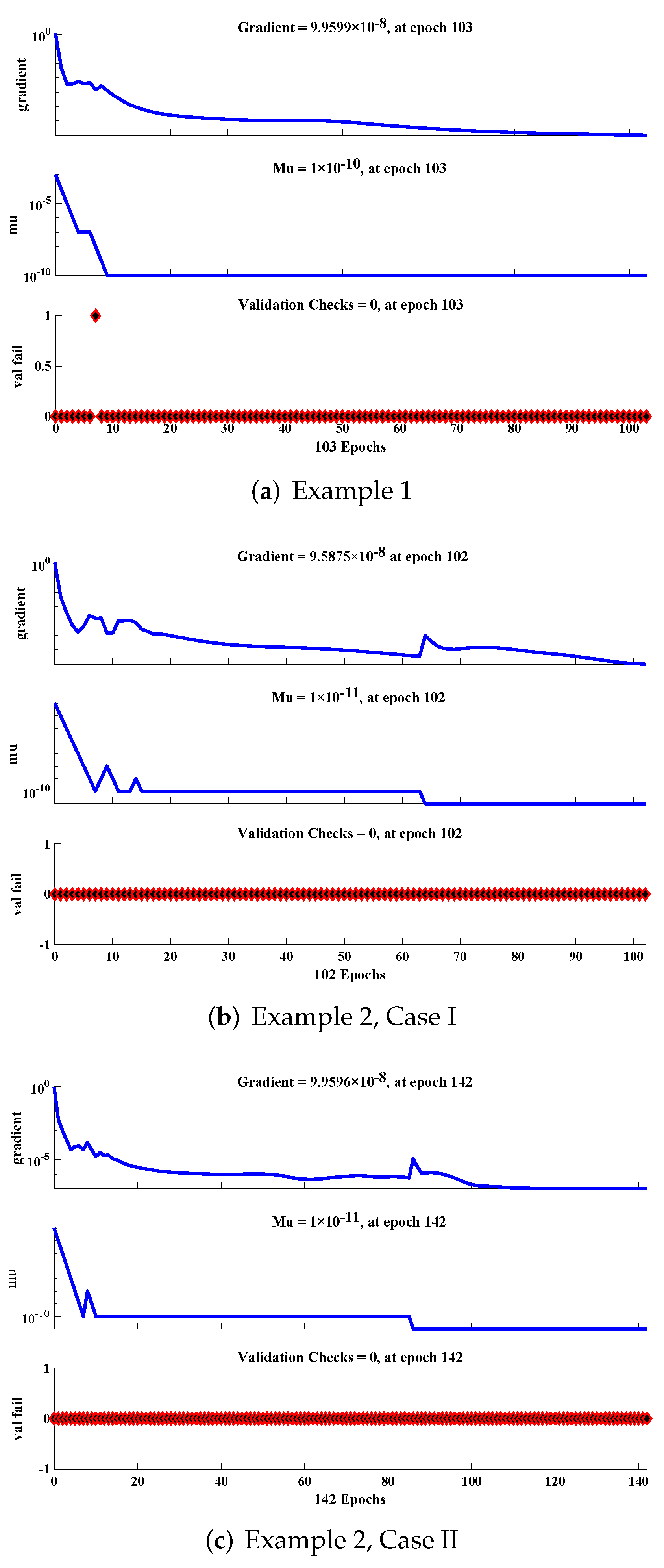
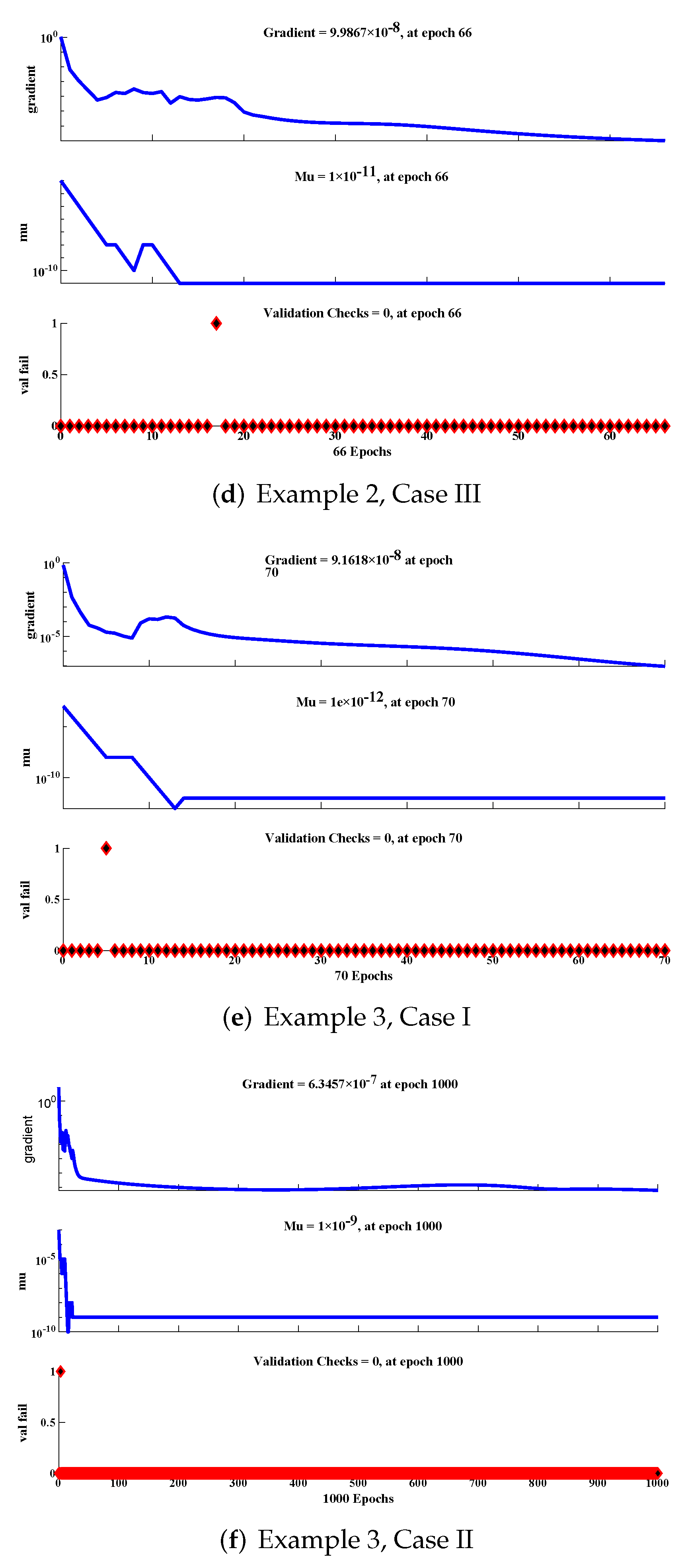
| Example | Case | Hidden Neurons | Training | Testing | Validation | Gradient | Mu | Epochs | Regression | Time (s) |
| 1 | 30 | 103 | 1 | <1 s | ||||||
| 2 | I | 30 | 102 | 1 | <1 s | |||||
| 2 | II | 30 | 142 | 1 | <1 s | |||||
| 2 | III | 30 | 66 | 1 | <1 s | |||||
| 3 | I | 30 | 70 | 1 | <1 s | |||||
| 3 | II | 30 | 1000 | 1 | 1 s | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, N.A.; Sulaiman, M.; Tavera Romero, C.A.; Laouini, G.; Alshammari, F.S. Study of Rolling Motion of Ships in Random Beam Seas with Nonlinear Restoring Moment and Damping Effects Using Neuroevolutionary Technique. Materials 2022, 15, 674. https://0-doi-org.brum.beds.ac.uk/10.3390/ma15020674
Khan NA, Sulaiman M, Tavera Romero CA, Laouini G, Alshammari FS. Study of Rolling Motion of Ships in Random Beam Seas with Nonlinear Restoring Moment and Damping Effects Using Neuroevolutionary Technique. Materials. 2022; 15(2):674. https://0-doi-org.brum.beds.ac.uk/10.3390/ma15020674
Chicago/Turabian StyleKhan, Naveed Ahmad, Muhammad Sulaiman, Carlos Andrés Tavera Romero, Ghaylen Laouini, and Fahad Sameer Alshammari. 2022. "Study of Rolling Motion of Ships in Random Beam Seas with Nonlinear Restoring Moment and Damping Effects Using Neuroevolutionary Technique" Materials 15, no. 2: 674. https://0-doi-org.brum.beds.ac.uk/10.3390/ma15020674