Kalman Filter-Based Online Identification of the Electric Power Characteristic of Solid Oxide Fuel Cells Aiming at Maximum Power Point Tracking


Abstract
:1. Introduction
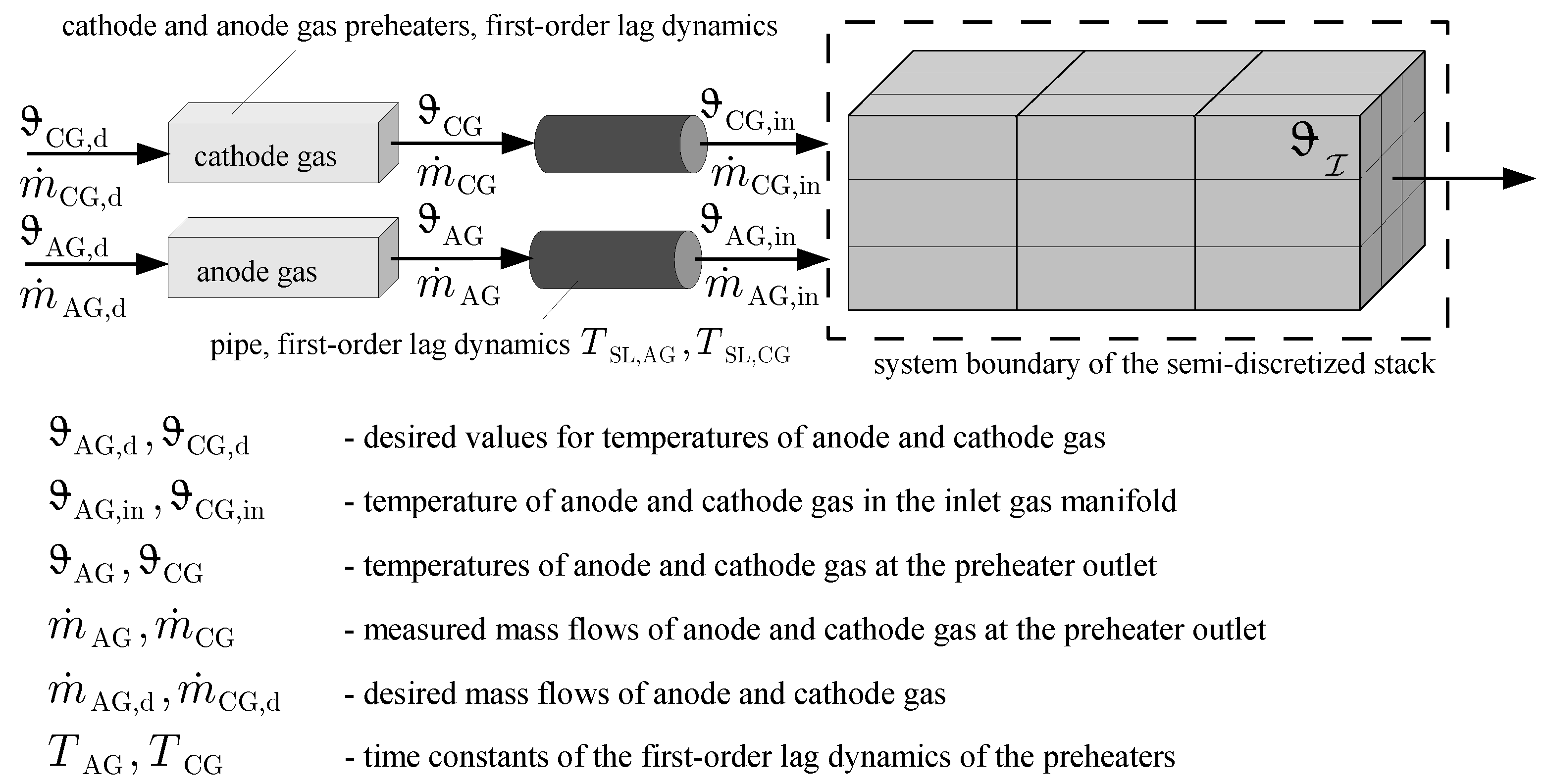
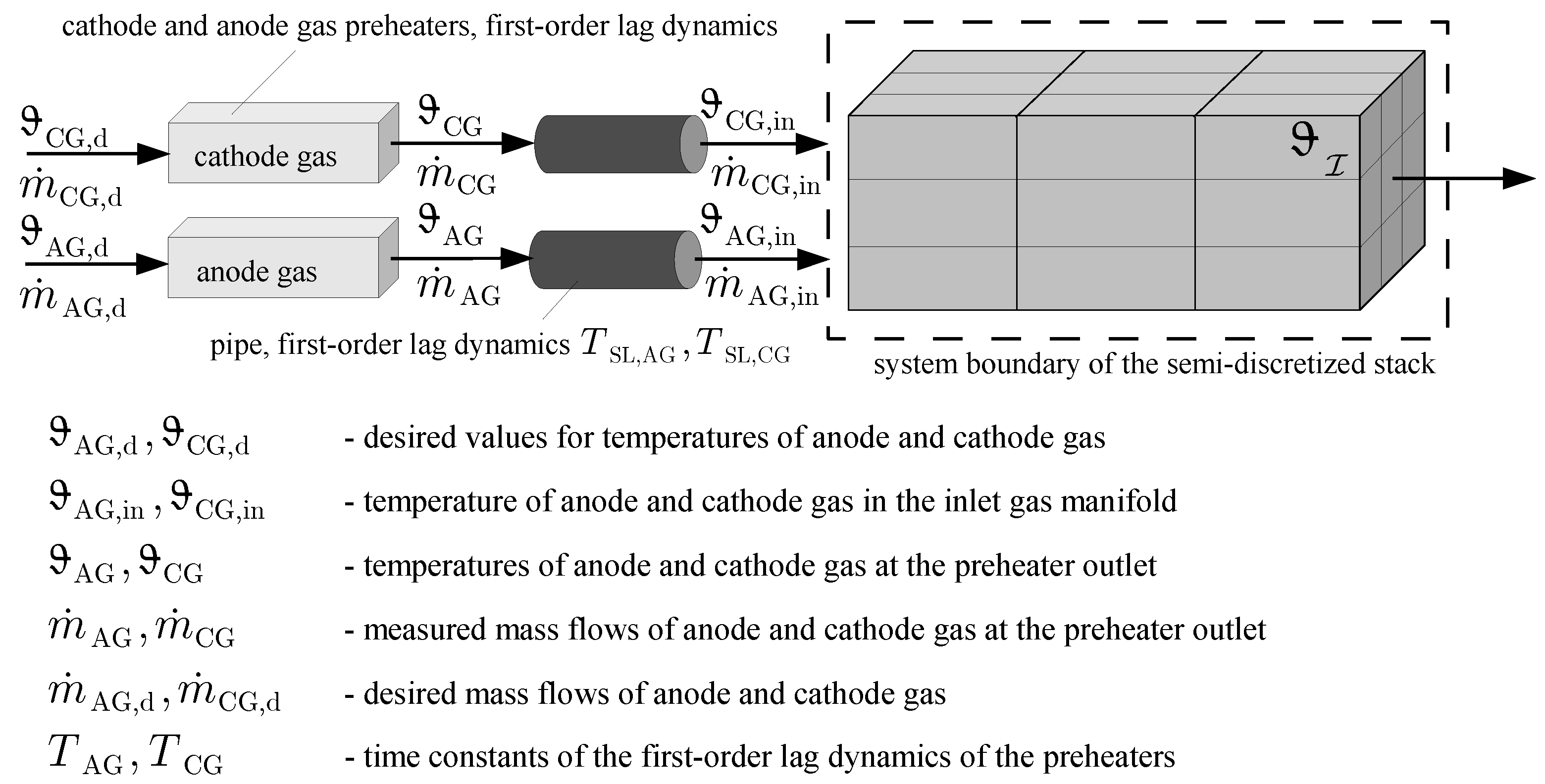
- variations of the composition and temperature of the supplied anode gas, especially if the hydrogen supply is implemented by gas reformation of hydro-carbonates;
- imperfect temperature control of the fuel cell stack by means of the cathode gas enthalpy flow as well as variations of the stack’s internal temperature distribution due to exothermic reaction enthalpies;
- rapid variations of the electric current and electric power taken from the SOFC module, leading to an instationary temperature distribution in the stack module; and
- aging of fuel cell components, etc.
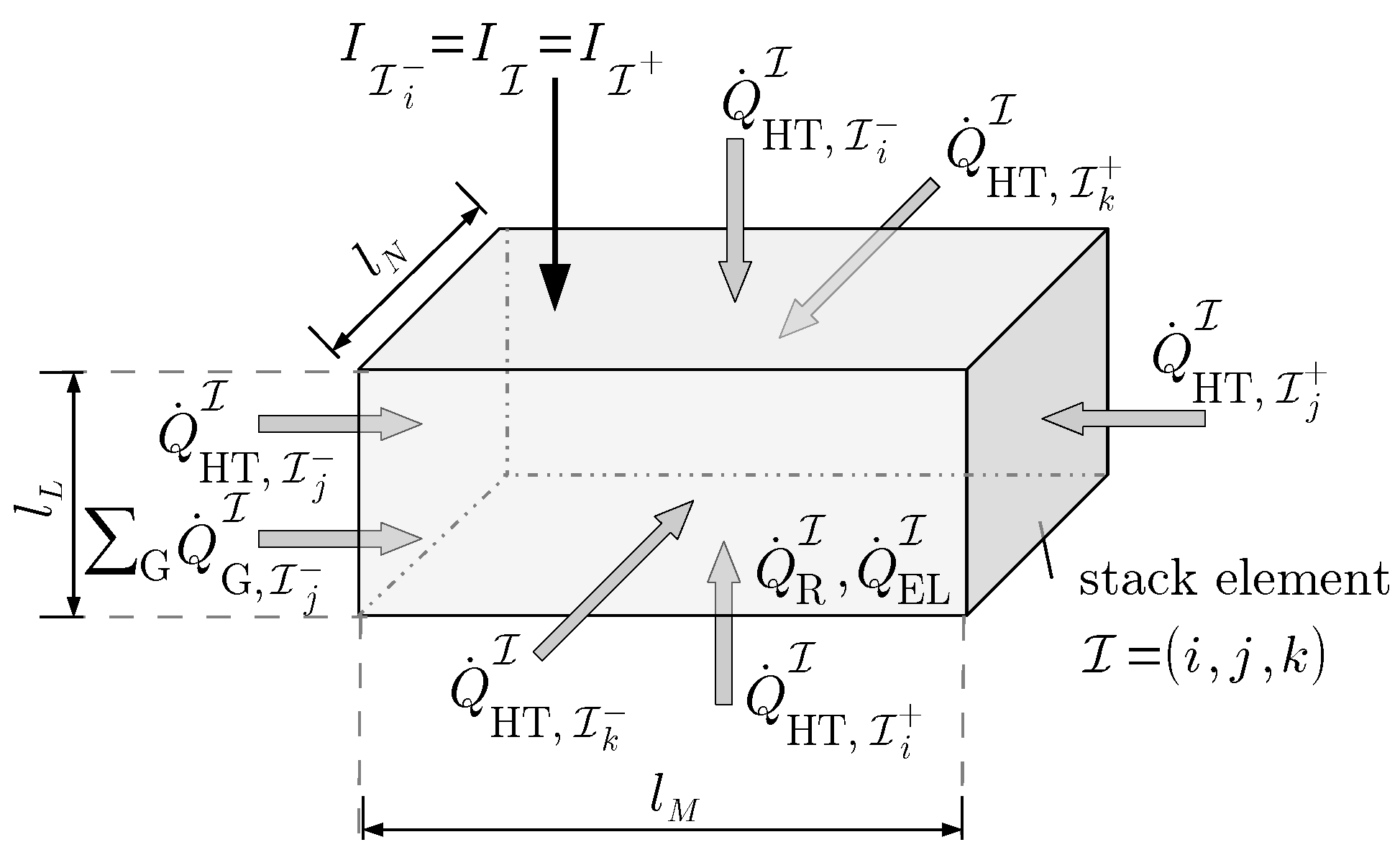
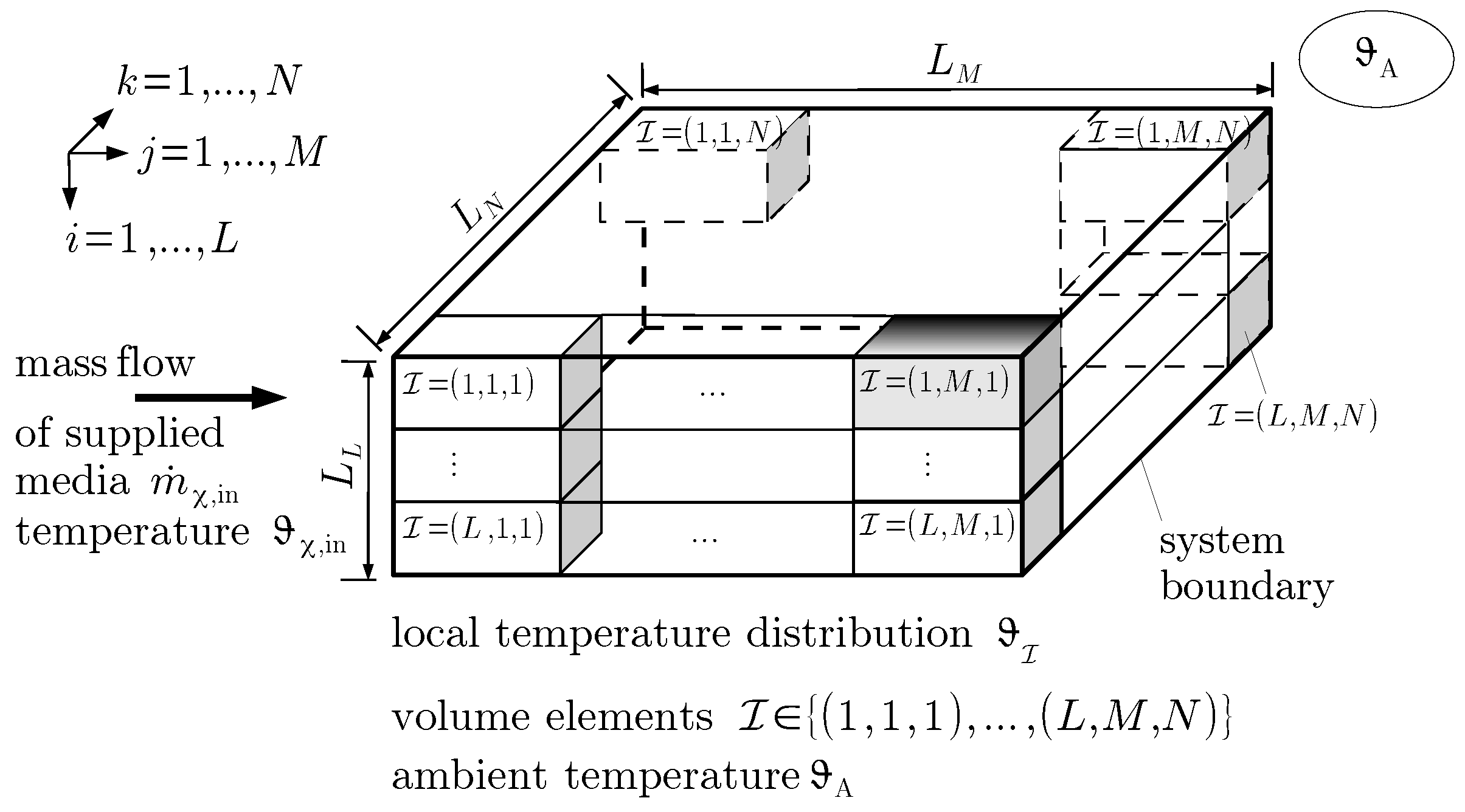
- heat transfer , , due to heat conduction in the interior of the stack as well as internal convection and radiation between the supplied gases and solid components;
- heat exchange between the stack module and the ambiance, both summarized in the term for elements located at the system boundary;
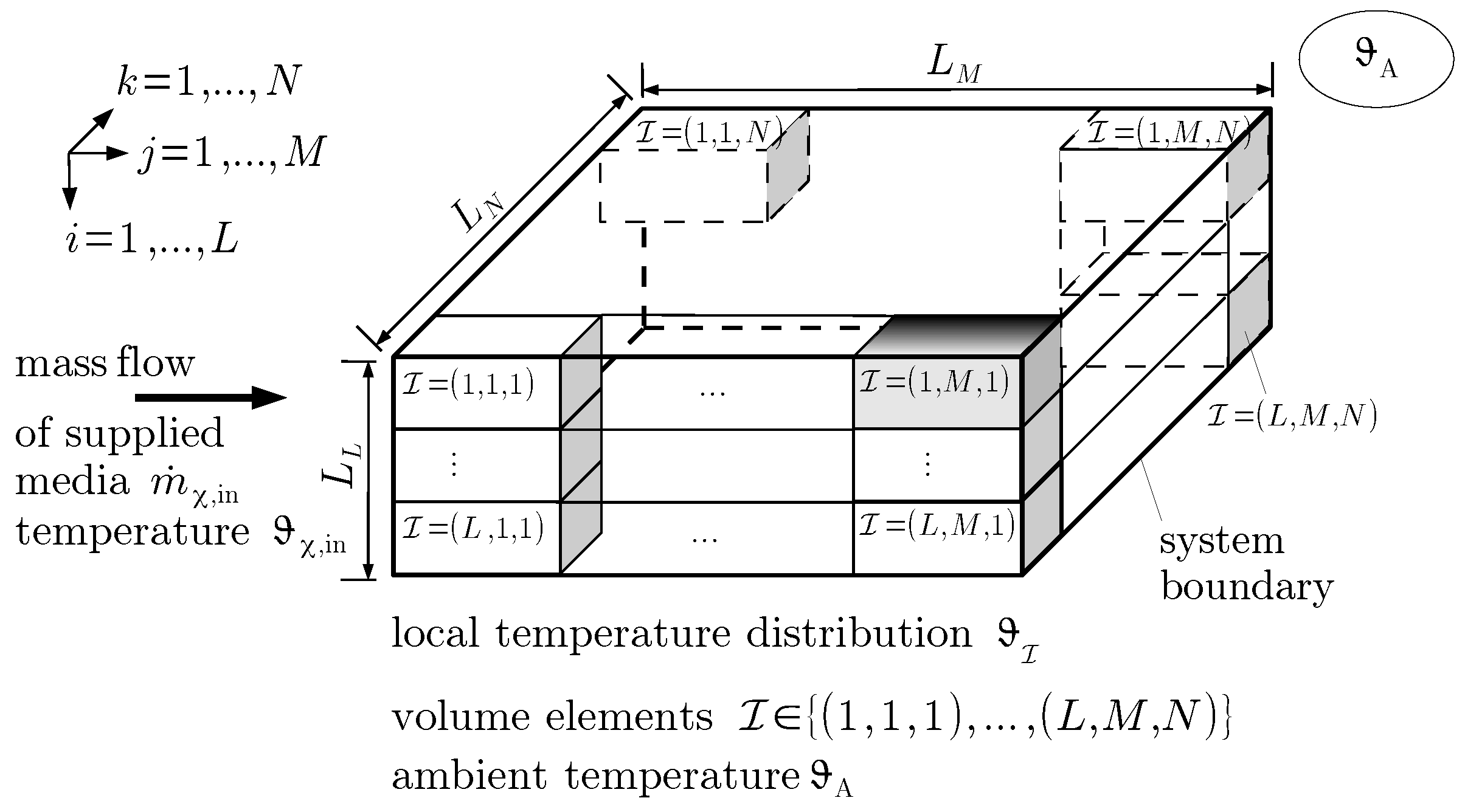
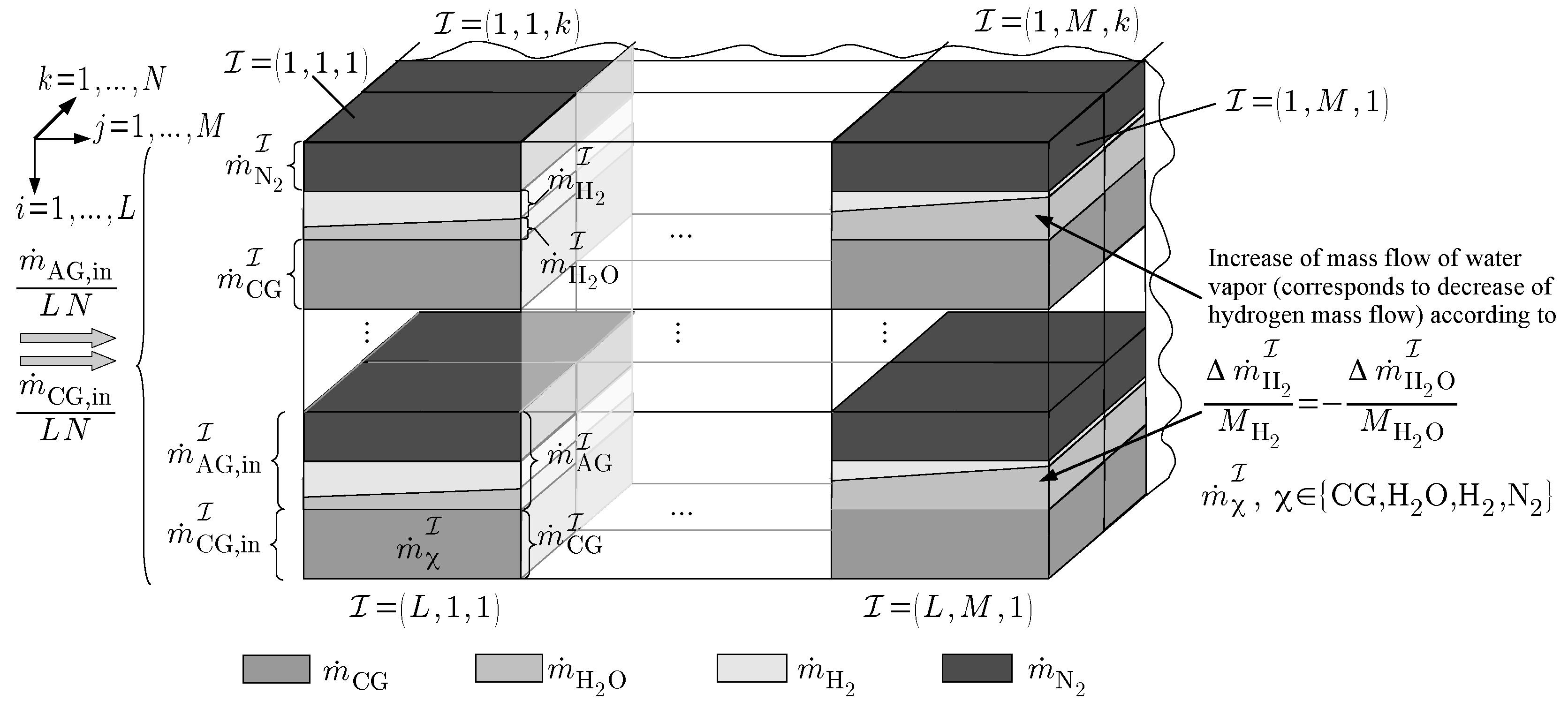
- enthalpy flows , , for the anode gas (AG) and the cathode gas (CG);
- exothermic reaction enthalpies ; and
- Ohmic heat production caused by the internal stack resistance and the local electric currents , where denotes the number of discretization segments orthogonal to the electric current.
2. Kalman Filter Design for Real-Time Estimation of Electric Power Characteristic Of Fuel Cells
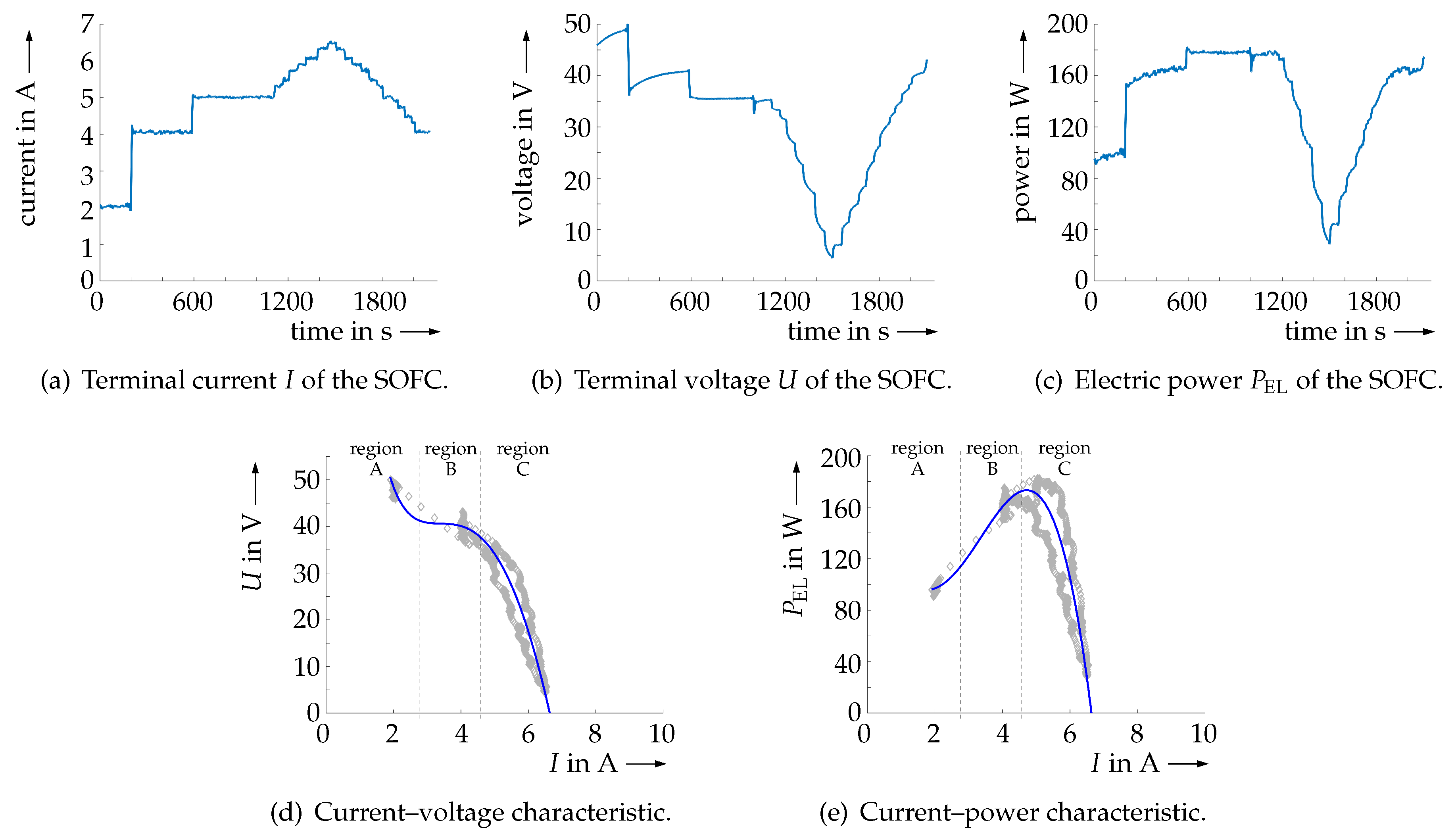
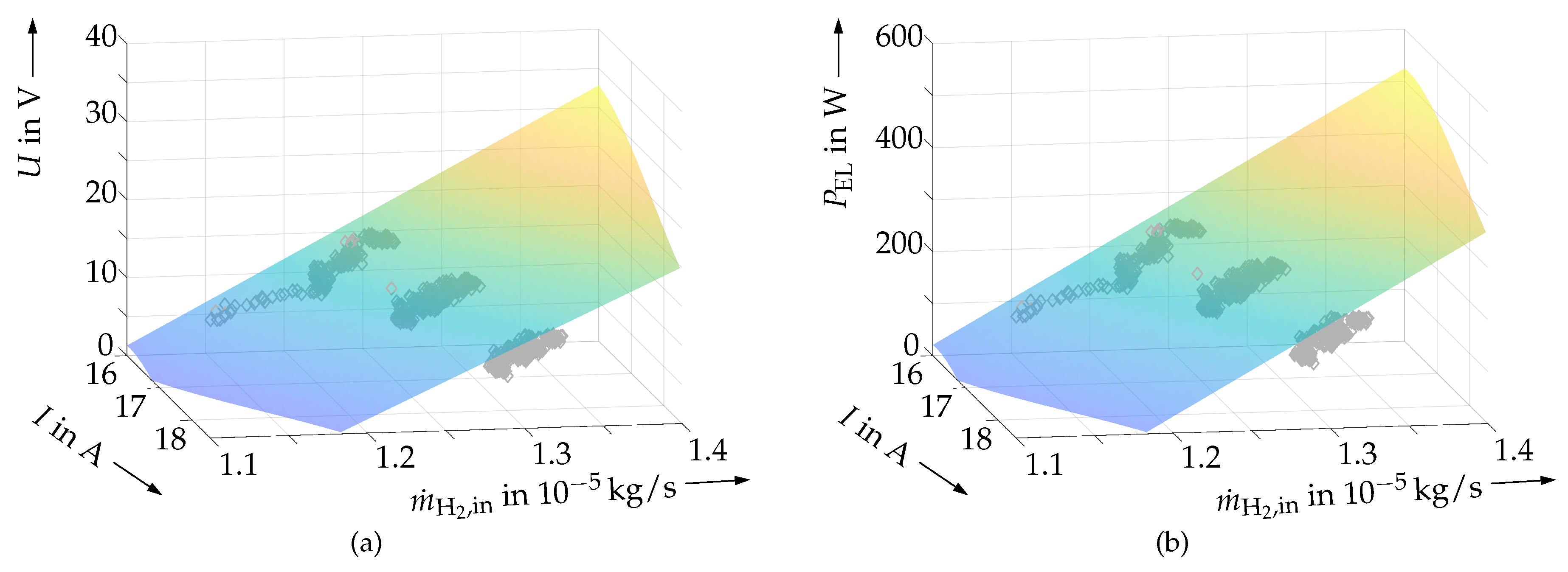
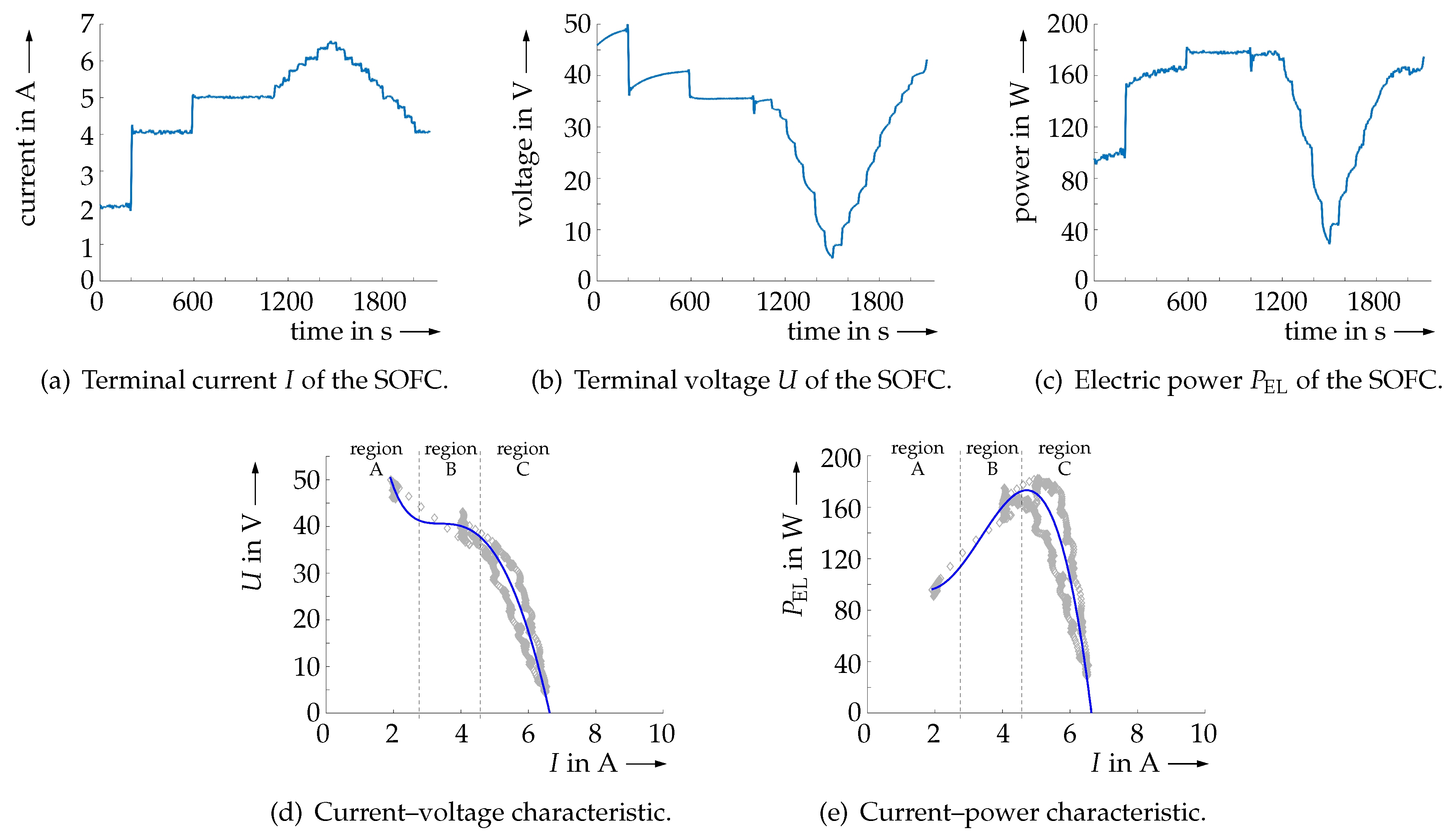
2.1. Fundamental Current–Voltage and Current–Power Characteristics of SOFCs
- Region A of activation polarization (characterized by small currents I close to the theoretical Nernst voltage characterizing the SOFC’s open-circuit behavior);
- Region B of Ohmic polarization corresponding to an almost linear reduction of the terminal voltage for increasing currents I; and
- Region C of concentration polarization, in which the terminal voltage U rapidly gets close to zero.
2.2. Simplified Model and Kalman Filter Design
3. Real-time Capable Robust Maximum Power Point Tracking
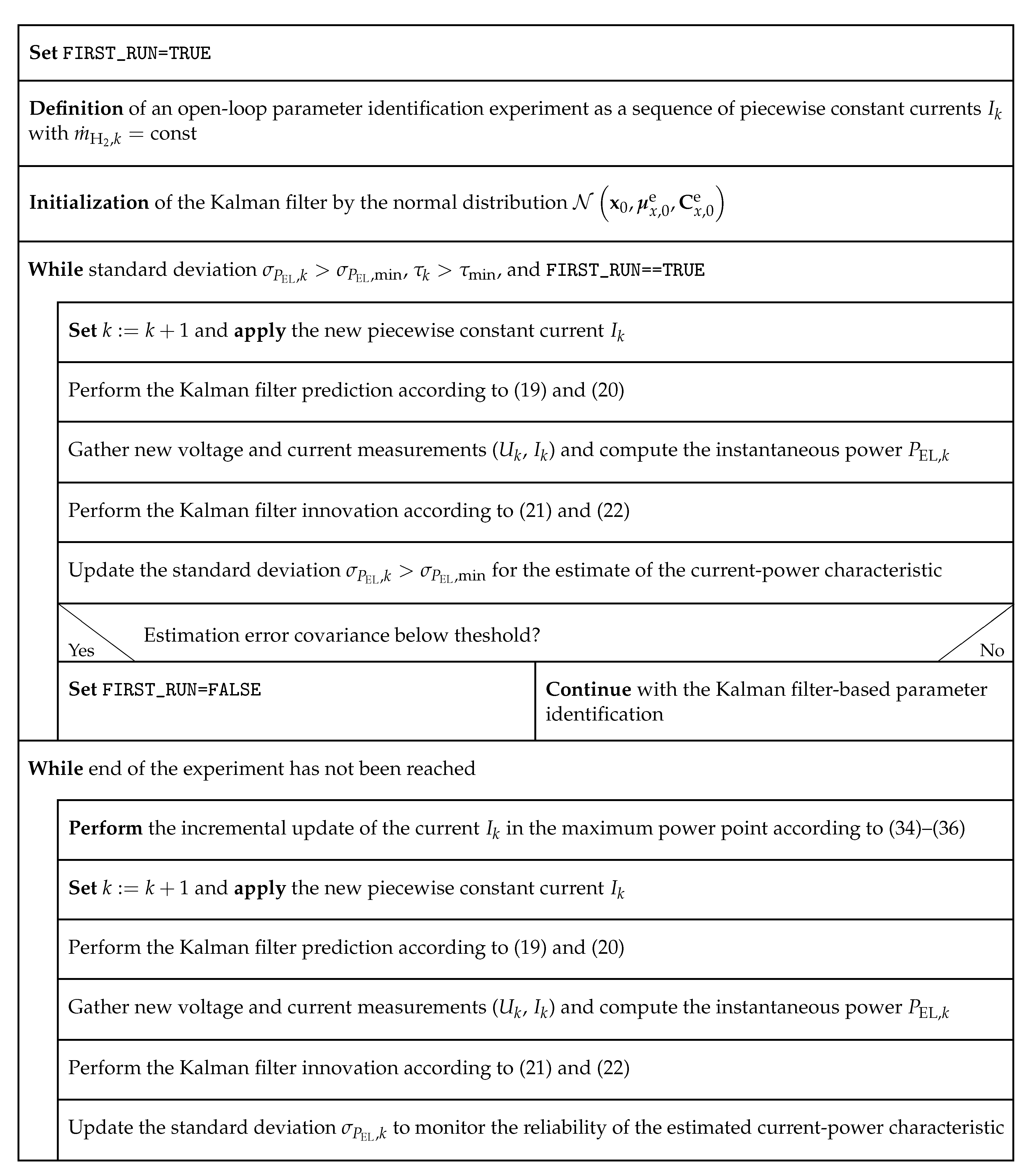
3.1. Algorithm for Combined Parameter Identification and Maximum Power Point Tracking
3.2. Kalman Filter-Based Online Parameter Identification
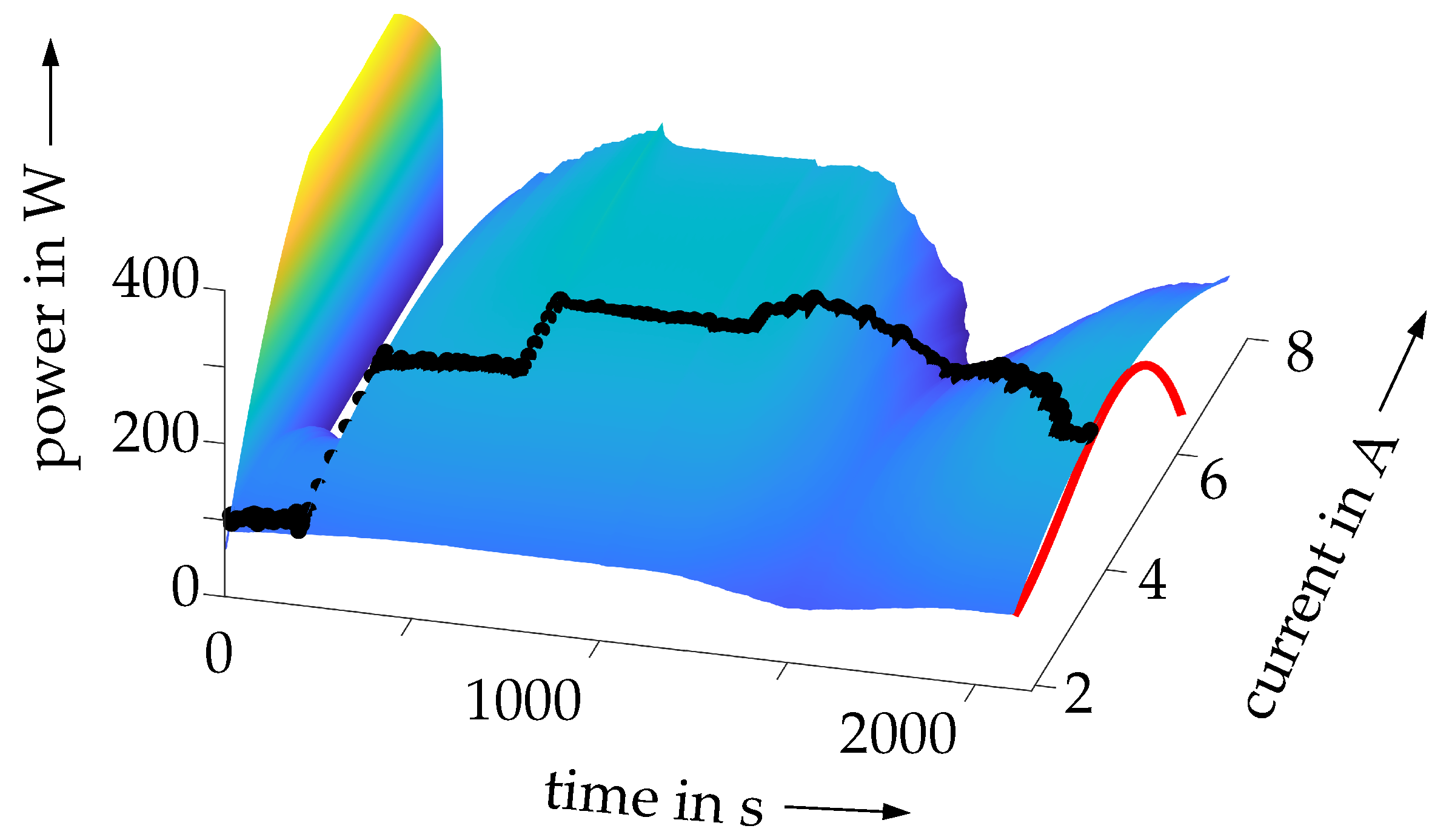
3.3. Numerical Validation of the Maximum Power Point Tracking Procedure
4. Conclusions and Outlook on Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Huang, B.; Qi, Y.; Murshed, A.K.M.M. Dynamic Modeling and Predictive Control in Solid Oxide Fuel Cells: First Principle and Data-based Approaches; John Wiley & Sons: Chichester, UK, 2013. [Google Scholar]
- Huang, B.; Qi, Y.; Murshed, A.K.M.M. Solid Oxide Fuel Cell: Perspective of Dynamic Modeling and Control. J. Process Contr. 2011, 21, 1426–1437. [Google Scholar] [CrossRef]
- Stiller, C.; Thorud, B.; Bolland, O.; Kandepu, R.; Imsland, L. Control Strategy for a Solid Oxide Fuel Cell and Gas Turbine Hybrid System. J. Power Sourc. 2006, 158, 303–315. [Google Scholar] [CrossRef]
- Dicks, A.L.; Rand, D.A.J. Fuel Cell Systems Explained; John Wiley & Sons: Chichester, UK, 2018. [Google Scholar]
- Gubner, A. Non-Isothermal and Dynamic SOFC Voltage-Current Behavior. In Solid Oxide Fuel Cells IX (SOFC-IX): Volume 1—Cells, Stacks, and Systems; Singhal, S.C., Mizusaki, J., Eds.; The Electrochemical Society: Pennington, NJ, USA, 15–20 May 2005; pp. 814–826. [Google Scholar]
- PEM Fuel Cell. Available online: www.psenterprise.com/sectors/fuelcell (accessed on 2 March 2020).
- Pukrushpan, J.; Stefanopoulou, A.; Peng, H. Control of Fuel Cell Power Systems: Principles, Modeling, Analysis and Feedback Design; Springer: Berlin, Germany, 2005. [Google Scholar]
- Bove, R.; Ubertini, S. Modeling Solid Oxide Fuel Cells; Springer: Berlin, Germany, 2008. [Google Scholar]
- Rauh, A.; Senkel, L.; Kersten, J.; Aschemann, H. Reliable Control of High-Temperature Fuel Cell Systems using Interval-Based Sliding Mode Techniques. IMA J. Math. Contr. Inform. 2016, 33, 457–484. [Google Scholar] [CrossRef]
- Rauh, A.; Senkel, L.; Aschemann, H. Interval-Based Sliding Mode Control Design for Solid Oxide Fuel Cells with State and Actuator Constraints. IEEE Trans. Ind. Electron. 2015, 62, 5208–5217. [Google Scholar] [CrossRef]
- Rauh, A.; Senkel, L.; Aschemann, H. Reliable Sliding Mode Approaches for the Temperature Control of Solid Oxide Fuel Cells with Input and Input Rate Constraints. In Proceedings of the 1st IFAC Conference on Modelling, Identification and Control of Nonlinear Systems MICNON 2015, St. Petersburg, Russia, 24–26 June 2015. [Google Scholar]
- Rauh, A.; Senkel, L.; Auer, E.; Aschemann, H. Interval Methods for the Implementation of Real-Time Capable Robust Controllers for Solid Oxide Fuel Cell Systems. Math. Comput. Sci. 2014, 8, 525–542. [Google Scholar] [CrossRef]
- Rauh, A.; Senkel, L. Interval Methods for Robust Sliding Mode Control Synthesis of High-Temperature Fuel Cells with State and Input Constraints. In Variable-Structure Approaches: Analysis, Simulation, Robust Control and Estimation of Uncertain Dynamic Processes; Rauh, A., Senkel, L., Eds.; Springer: Cham, Switzerland, 2016; pp. 53–85. [Google Scholar]
- Rauh, A.; Senkel, L.; Aschemann, H. Sensitivity-Based State and Parameter Estimation for Fuel Cell Systems. IFAC Proceedings Volumes 2012, 45, 57–62. [Google Scholar] [CrossRef]
- Senkel, L.; Rauh, A.; Aschemann, H. Experimental Validation of a Sensitivity-Based Observer for Solid Oxide Fuel Cell Systems. In Proceedings of the 18th International Conference on Methods & Models in Automation & Robotics (MMAR), Międzyzdroje, Poland, 26–29 August 2013. [Google Scholar]
- Kunusch, C.; Puleston, P.; Mayosky, M. Sliding-Mode Control of PEM Fuel Cells; Springer: London, UK, 2012. [Google Scholar]
- Frenkel, W.; Rauh, A.; Kersten, J.; Aschemann, H. Experiments-Based Comparison of Different Power Controllers for a Solid Oxide Fuel Cell Against Model Imperfections and Delay Phenomena. Algorithms 2020, in press. [Google Scholar]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Framework of Maximum Power Extraction From Solar PV Panel Using Self Predictive Perturb and Observe Algorithm. IEEE Trans. Sustain. Energ. 2018, 9, 895–903. [Google Scholar] [CrossRef]
- Li, C.; Chen, Y.; Zhou, D.; Liu, J.; Zeng, J. A High-Performance Adaptive Incremental Conductance MPPT Algorithm for Photovoltaic Systems. Energies 2016, 9, 288. [Google Scholar] [CrossRef] [Green Version]
- Burstein, G. A Hundred Years of Tafel’s Equation: 1905–2005. Corrosion Sci. 2005, 47, 2858–2870. [Google Scholar] [CrossRef]
- Tafel, J. Über die Polarisation bei kathodischer Wasserstoffentwicklung. Zeitschrift für physikalische Chemie 1905, 50, 641–712. (In German) [Google Scholar] [CrossRef]
- Frenkel, W.; Rauh, A.; Kersten, J.; Aschemann, H. Optimization Techniques for the Design of Identification Procedures for the Electro-Chemical Dynamics of High-Temperature Fuel Cells. In Proceedings of the 24th IEEE Intl. Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 26–29 August 2019. [Google Scholar]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications; Springer: Heidelberg, Germany, 2011. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Stengel, R. Optimal Control and Estimation; Dover Publications: Mineola, NY, USA, 1994. [Google Scholar]
- Anderson, B.; Moore, J. Optimal Filtering; Dover Publications: Mineola, NY, USA, 2005. [Google Scholar]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer: Berlin, Germany, 2006. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 0 | |
| 0 | |
| 0 |
| Parameter | Value |
|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rauh, A.; Frenkel, W.; Kersten, J. Kalman Filter-Based Online Identification of the Electric Power Characteristic of Solid Oxide Fuel Cells Aiming at Maximum Power Point Tracking. Algorithms 2020, 13, 58. https://0-doi-org.brum.beds.ac.uk/10.3390/a13030058
Rauh A, Frenkel W, Kersten J. Kalman Filter-Based Online Identification of the Electric Power Characteristic of Solid Oxide Fuel Cells Aiming at Maximum Power Point Tracking. Algorithms. 2020; 13(3):58. https://0-doi-org.brum.beds.ac.uk/10.3390/a13030058
Chicago/Turabian StyleRauh, Andreas, Wiebke Frenkel, and Julia Kersten. 2020. "Kalman Filter-Based Online Identification of the Electric Power Characteristic of Solid Oxide Fuel Cells Aiming at Maximum Power Point Tracking" Algorithms 13, no. 3: 58. https://0-doi-org.brum.beds.ac.uk/10.3390/a13030058