1. Introduction
Owing to the joint effect of the tough service environment and the long-term over-limit load, bridges will inevitably suffer deterioration during operation. Thus, health monitoring systems have been widely used in the condition alarming of long-span bridges. Accordingly, the comprehensive exploitation of bridge monitoring information and accurate identification of the location and extent of damage is of crucial scientific research significance and engineering application value to ensure bridge safety and smooth road networks [
1].
The essence of structural damage identification is the problem of pattern recognition, which can be realized using artificial intelligence algorithms [
2,
3]. Generally, traditional artificial intelligence algorithm-based damage identification methods include two steps: (i) extraction of damage sensitive features (DSFs). Time series analysis, frequency spectrum analysis, statistical analysis, and other means are used to extract features that characterize the damage state from the structural response [
4,
5]; (ii) prediction of damage. Artificial intelligence algorithms are employed to establish the mapping relationship between DSFs and damage location and severity [
6,
7]. For instance, Arangio et al. [
8] utilized probabilistic logic methods to develop a two-step Bayesian framework for damage localization and extent prediction of the suspension bridge main cables and hangers. Casciati et al. [
9] applied the firefly and the artificial bee colony algorithms to diagnose the damage caused by the decrease in stiffness of the cable and main beam. Due to the high uncertainty of the measurement and finite element modeling, Ding et al. [
10] established the objective function using modal data and sparse regularization technology, and they developed a hybrid group intelligence technology involving the Jaya and tree-seed algorithm to identify structural damage. Meng et al. [
11] used modal flexibility as DSF and performed damage diagnosis of suspension bridge hangers based on a genetic algorithm. Guan et al. [
12] recruited wavelet coefficient modulus maxima as DSF and employed an artificial neural network (ANN) and particle swarm algorithm to complete the damage identification of a suspension bridge. Seyedpoor et al. [
13] developed a two-step structural damage identification method. First, the support vector machine was used to initially determine the damage location to reduce the search space dimension, and then, the evolutionary algorithm was used to accurately and quickly search for the damage location. The above study shows that current research on conventional artificial intelligence algorithms-based damage identification methods mainly focuses on traditional machine learning and evolutionary algorithms. However, traditional machine learning algorithms, such as ANN and naive Bayes, are shallow learning. The trained model has insufficient ability to recognize complicated nonlinear damage, and the accuracy largely depends on the sensitivity of the selected DSFs. Meanwhile, it is easy to fall into the local optimal solution problem during the solution process of evolutionary algorithms. Hence, it is essential to explore more effective ways to solve the aforementioned issues.
In 2006, Hinton et al. [
14] proposed deep belief networks and introduced a layer-by-layer pre-training method, which laid the foundation for the development of deep learning. Shallow learning mostly relies on manual experience or feature conversion methods to obtain features. In contrast, deep learning processes the original data through multilayer nonlinear transformation, and then, it outputs higher-dimensional and more abstract features, thereby avoiding complicated and repetitive feature engineering.
Convolutional neural networks (CNNs) and long short-term memory networks (LSTM), which are of great application value, have gradually captured widespread attention from scholars in the engineering field. Various research studies have been conducted, which can be summarized into three aspects. (i) Structural defects detecting. Cha et al. [
15] designed a concrete crack detection method combining computer vision (CV) and CNN, which can detect concrete cracks, steel corrosion, bolt corrosion, and steel delamination. Gao et al. [
16] introduced VGGNet for structural damage detection through transfer learning technology, which shows that transfer learning technology has broad application prospects in image-based structural defects recognition. Xu et al. [
17] formulated a framework for crack recognition and extraction of bridge steel box girders based on a restricted Boltzmann machine. (ii) Structural damage identification. Lin et al. [
18] devised a CNN-based damage recognition method to accurately identify the damage location and degree of the simply supported beam finite element model and automatically learn the low order of the mode shape. Abdeljaber et al. [
19] used the vibration response signal as the model input for the CNN and separately trained the model for each node of the planar steel frame structure to determine the bolt connection state. Yu et al. [
20] proposed a novel method based on deep CNNs for identifying and locating damage to building structures equipped with intelligent control equipment. (iii) Data processing and state prediction. Bao et al. [
21] work out an anomaly detection method of structural health monitoring data based on CV and CNN. Zhang et al. [
22] applied the advantages of LSTM to model time series changes and used it to predict the depth of groundwater levels in agricultural areas. Zhang et al. [
23] utilized LSTM for sewer overflow monitoring and achieved better results than multilayer perception and wavelet neural networks. The above-mentioned research demonstrates that CNN does have a superior performance in feature extraction, and LSTM also has unique advantages in describing time series changes.
Recently, the hybrid architecture of CNN and LSTM has been widely adopted due to its outstanding performance. For instance, Yang et al. [
24] introduced CNN-LSTM architecture to non-contact computer vision-based vibration measurement and used the structural vibration video to identify its basic modal frequency. Zhao et al. [
25] employed the hybrid architecture to establish the mapping relationship between the external excitation and the nonlinear response, thereby detecting the early damage of the structure. Petmezas et al. [
26] proposed to use the CNN-LSTM model to help clinicians detect common atrial fibrillation in real time on routine screening electrocardiograms. Wigington et al. [
27] utilized the CNN-LSTM model for handwritten font recognition, which significantly reduced the word error rate and character error rate. Qiao et al. [
28] proposed a short-term traffic flow prediction method based on the 1DCNN-LSTM model, which aims to effectively solve traffic travel and management problems. Evidently, the CNN-LSTM architecture can fully combine the advantages of these two independent models, which is demonstrated to fulfill more complicated tasks.
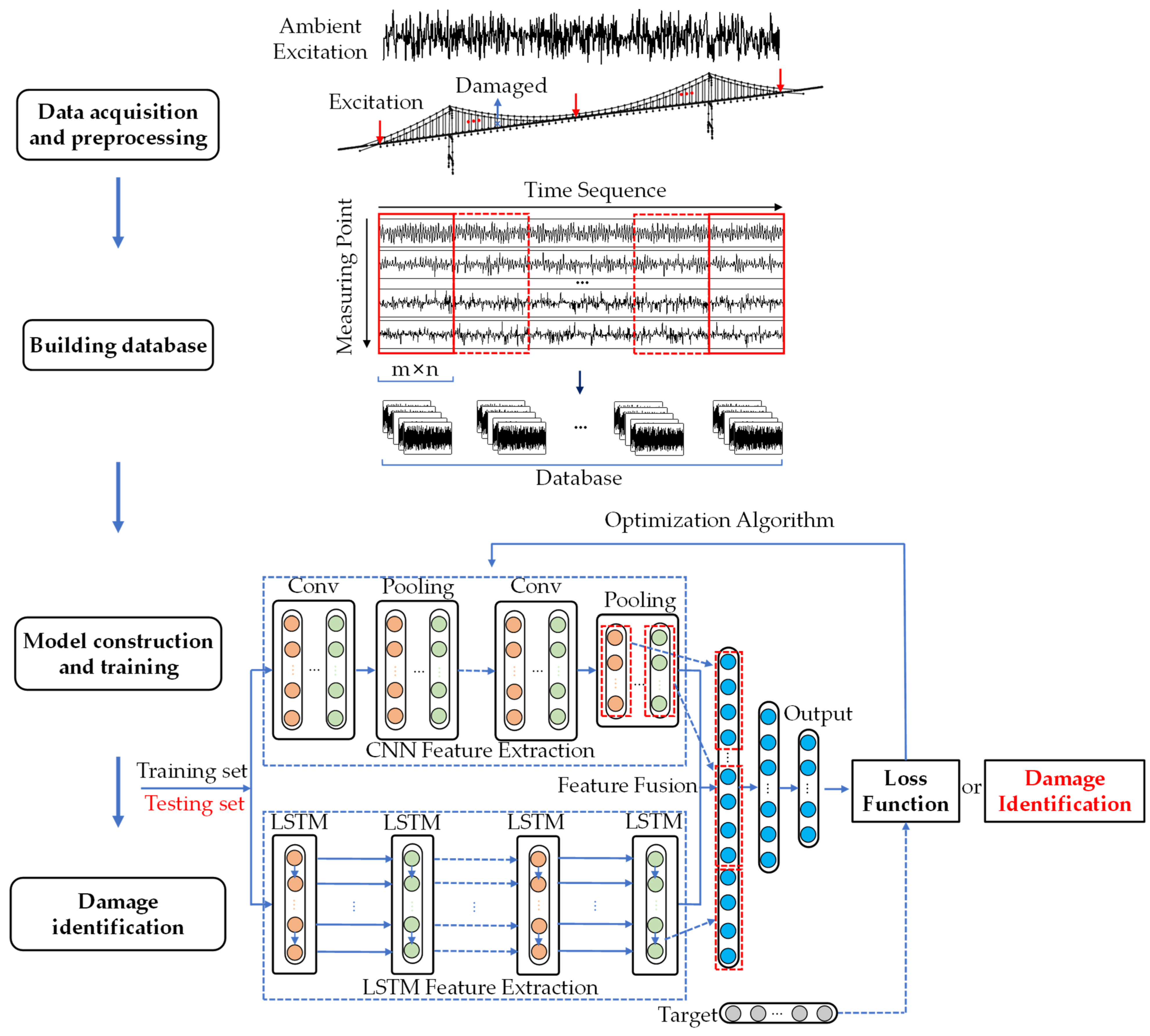
From the above literature review, the following conclusions can be drawn: (1) Shallow features used for damage identification are usually not suitable for nonlinear situations and harbor poor sensitivity. (2) CNN can extract the high-dimensional features, which is beneficial to characterize the current damage state of the structure. (3) LSTM can meticulously model the structural time history response, which is promising to depict the historical damage state. (4) CNN-LSTM model holds outstanding performance in numerous application scenes. Inspired by this, this study integrates the advantages of CNN and LSTM in feature extraction and time-series modeling. A CNN-LSTM-based damage identification method for long-span bridges is proposed. This method directly acts on the structural accelerations. It uses CNN to extract high-dimensional features of accelerations and LSTM to extract time-series features. Eventually, the extracted features are fused and input into the fully connected layer to complete the damage identification.
The remainder of this article is expanded in the following sections.
Section 2 introduces the basic structure and optimization methods of CNN and LSTM and presents the procedure of the proposed method.
Section 3 uses numerical simulation to obtain data samples and build a database to verify the feasibility and effectiveness of the proposed method.
Section 4 discusses the influence of environmental noise on the proposed method and compares the performance of the proposed method with that of the CNN.
Section 5 concludes this paper.
3. Numerical Example
In this section, a finite element model of a long-span suspension bridge is established to obtain the acceleration response under various damage scenarios, and a CNN-LSTM model for damage location and severity identification is constructed to verify the effectiveness and feasibility of the proposed method.
3.1. Details of the Long-Span Suspension Bridge
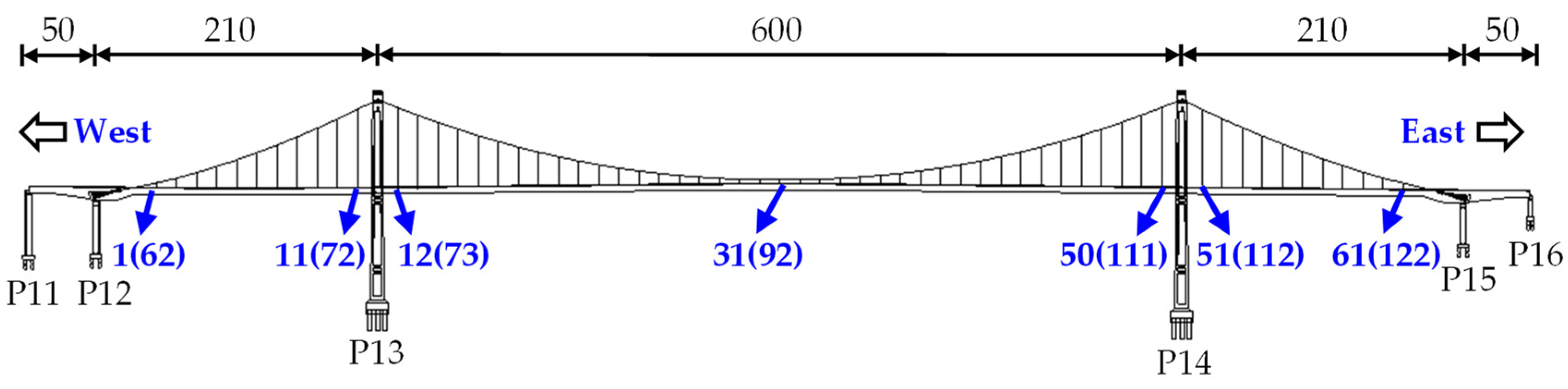
The Egongyan special track bridge is a self-anchored suspension bridge with a main span of 600 m, and it is the world’s largest bridge of its kind, as shown in
Figure 5. The main bridge span combination is 50 + 210 + 600 + 210 + 50 = 1120 m: a total of five spans. The total width of the main bridge deck is 22 m. The main beam is a mixed structure of steel box and concrete box. The steel box girder section is 926.4 m long, and the concrete box girder section is 170.16 m long. A steel–concrete joint section with a length of 11.72 m is present at the junction of the steel box and the concrete box on both sides. The steel box adopts six web sections made of Q345qD and Q420qE steel. The concrete box adopts a single-box three-chamber box girder, and it is made of C55 concrete.
The suspension bridge has 122 hangers in total, with 61 hangers on the upstream and downstream sides. A three-dimensional finite element model was built using Midas/civil 2019, which is professional software for bridge structure analysis. The model is divided into 937 nodes and 924 elements (674 beam elements and 250 tension-only elements). The main beams and bridge towers are simulated by beam elements, and the main cables and hangers are simulated by tension-only truss elements (cable elements).
3.2. Setting Damage Scenarios and Building Database
Owing to the joint effects of environmental factors and external loads, damage to the hangers of suspension bridges during operation is mainly manifested in rust or breakage of wires after aging and cracking of the protective sleeve. The corrosion and fracture of the hangers will cause the effective cross-sectional area to decrease. Ignoring the changes in the quality of the entire hanger after the steel wire is corroded and broken, this study adopts a method for reducing the elastic modulus of the hanger to simulate the damage of the hanger. The damage rate is defined to represent the damage severity of the hanger, and the value of the damage rate is the reduction rate of the elastic modulus of the hanger.
For convenience, this article numbers all the hangers according to the following rules. From the west to the east side span, the hangers on the upstream side are sequentially numbered 1, 2, 3... 59, 60, 61, and those at the downstream side are sequentially numbered 62, 63, 64… 120, 121, 122, as shown in
Figure 5.
To test the performance of the proposed method, this section identifies the preset single-location damage, multi-location damage, and different damage severities of the hangers. The 1–31 hangers were chosen as the damage object, and the damage scenario was defined as a combination of damage type and degree of damage. There are three types of damages: damage to a single hanger, two hangers, and three hangers. The damage severity was set as 5, 15, 25, 35, and 45%. Therefore, there are 15 damage scenarios in this study, and each scenario corresponds to multiple damage combinations. The specific settings of the damage scenarios are shown in
Table 1.
According to the damage scenarios shown in
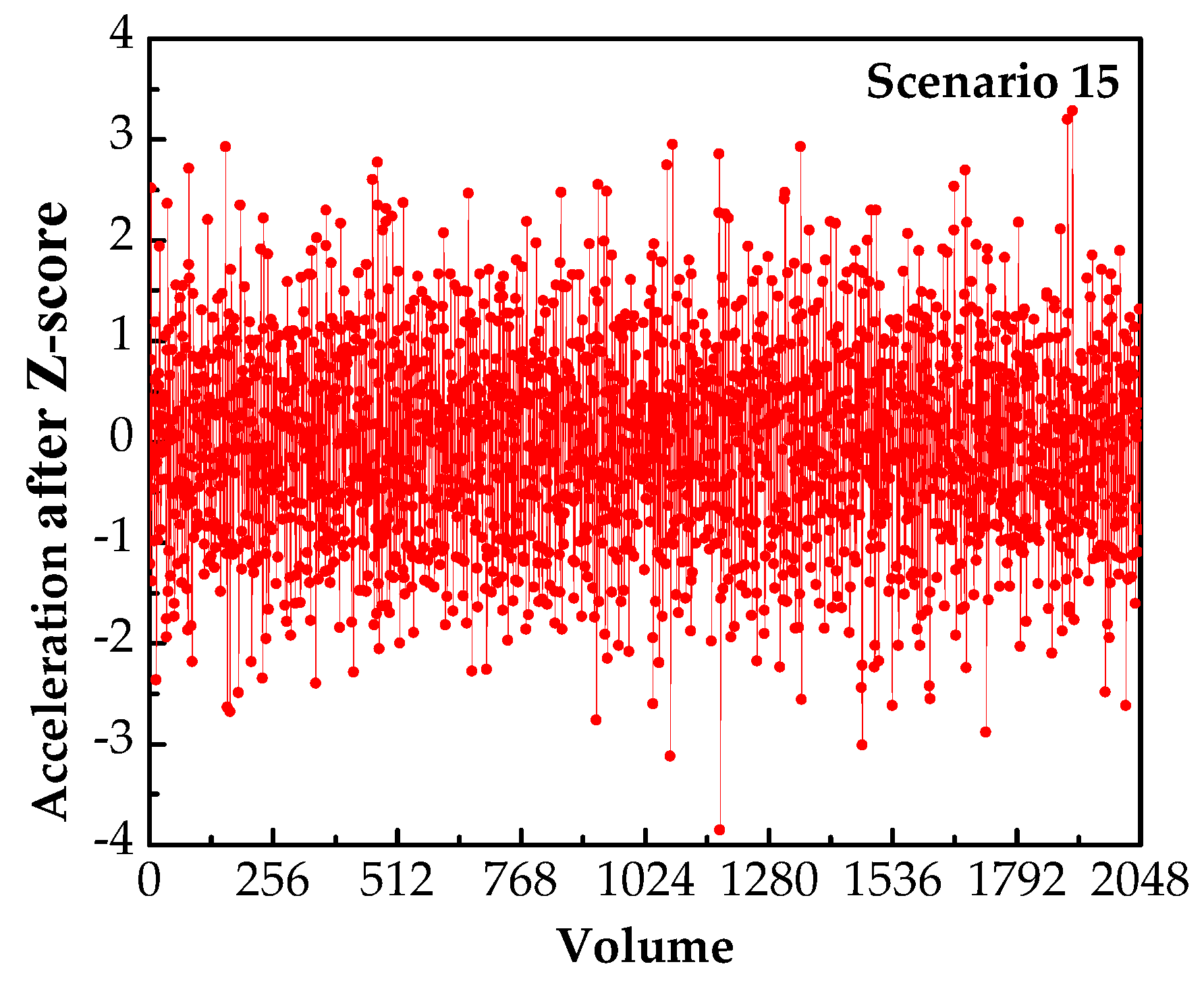
Table 1, the finite element model was subjected to ambient excitation for dynamic analysis, and the vertical acceleration of hangers 1–31 was obtained. The ambient excitation was simulated by white noise excitation with a sampling frequency of 512 Hz, and the analysis time was 34 s. Each damage combination contained 31 acceleration data, and the sequence length of each data was 17,408. The Z-score normalization method was used to preprocess the acquired data.
Figure 6 is part of the preprocessed acceleration data of hanger 15 under scenario 15.
The 31 acceleration data collected under the same damage combination are composed of multi-channel data in the order of the hanger number, and a total of 510 acceleration data with a dimension of 17,408 × 31 can be obtained. Then, each piece of acceleration data is divided into 17 samples with dimensions of 1024 × 31, so a total of 8670 samples can be generated from 510 pieces of data. Each sample is marked with the damage location and degree, and all samples constitute the database. Finally, the database is divided into a training set, validation set, and test set, which approximately conforms to the ratio of 6:2:2. The number of samples is shown in
Table 1.
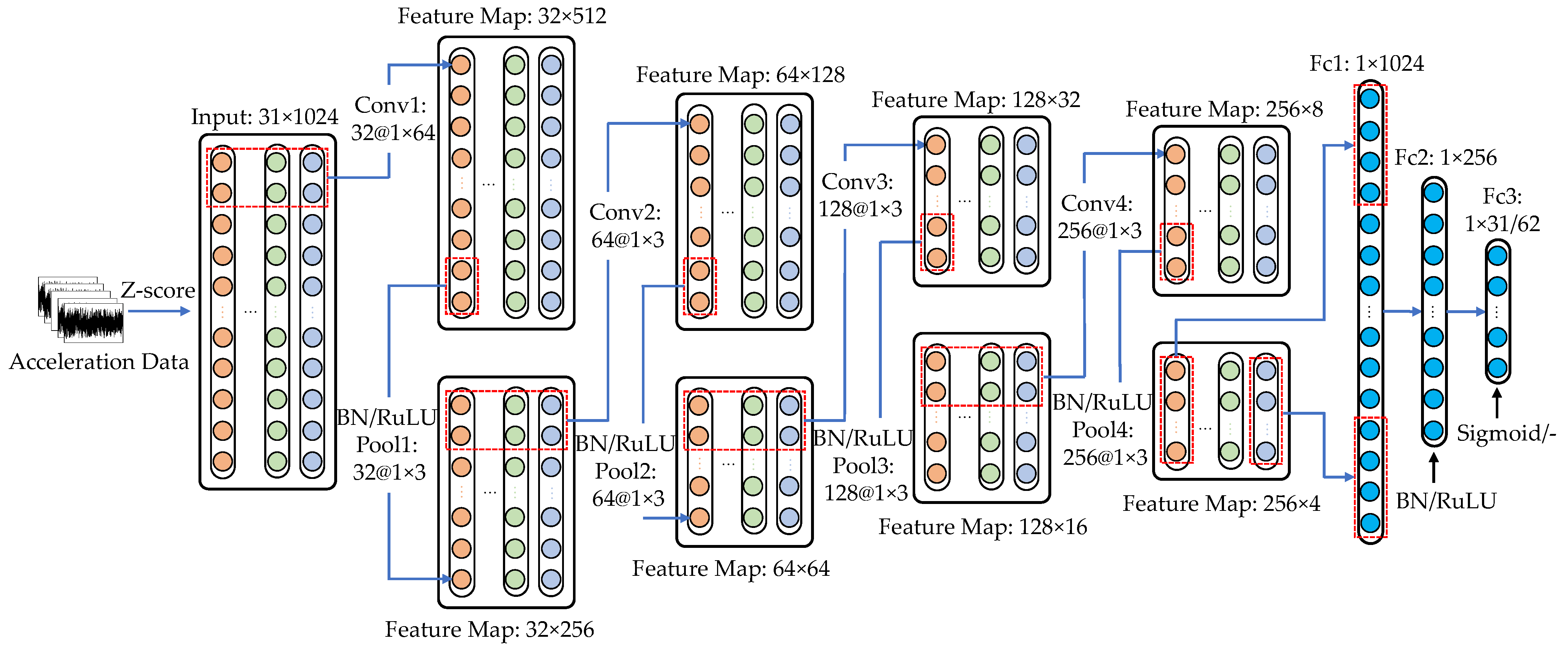
3.3. Architecture of the Proposed CNN-LSTM
A CNN-LSTM for the damage localization and severity prediction of hangers is designed. The architecture of the CNN includes four convolutional blocks for extracting the high-dimensional features of accelerations (denoted as CNN features) and three fully connected layers for damage localization or severity recognition. The architecture of LSTM uses the LSTM layer to extract the time-series features of accelerations (denoted as LSTM features). It should be noted that CNN and LSTM share the three fully connected layers. After merging the extracted CNN and LSTM features, the fused features are used as the input of the fully connected layer to predict the damage location or severity.
The model input adopts the acceleration with dimensions of 1024 × 31, where the input height 31 is the number of hangers, and the input width 1024 is the sequence length. However, the input dimension of the LSTM layer is related to the time step and sequence length. This study sets the input dimension of the LSTM layer to 64 × 496, where 64 is the time step and 496 is the sequence length. Therefore, the sample dimensions need to be converted according to the following steps. Each sample is divided into 16 parts with dimensions of 64 × 31. Then, the 16 parts of the data are spliced along the first dimension into a sequence of 496 acceleration data points, so the transformed sample dimension is 64 × 496.
The LSTM layer consists of 64 LSTM units and 496 hidden neurons. Convolutional blocks are composed of a convolutional layer, a BN layer, an activation function, and a pooling layer. Fully connected block 1 is composed of a fully connected layer and a BN layer, and fully connected block 3 is the classification layer. The size of the convolution kernel in convolutional block 1 is 64 × 1, and the size of the convolution kernel in other convolutional blocks is 3 × 1. The activation function of the convolutional block and the fully connected block 1 selects ReLU. The pooling layer in the convolutional block adopts max pooling with a stride of 2. For the prediction of damage severity, the fully connected block 3 has 31 outputs, corresponding to the number of hangers. For damage localization, each hanger has two states (damaged/undamaged), and the fully connected block 3 has a total of 62 outputs. The architecture of the proposed CNN-LSTM model is shown in
Figure 7, and the parameters are shown in
Table 2.
3.4. Model Training and Hyperparameter Optimization
This study is based on the deep learning framework Pytorch and the programming language Python to complete the model compilation work. A computer with an Intel Core i5-9300H CPU, GeForce GTX 1650 GPU, and RAM 16.00 GBs was used. Additionally, Windows 10, Pytorch 1.4.0, and Python 3.8.2 operating systems were used, as well as CUDA 10.2 software.
For deep learning algorithms, hyperparameters are critical for model performance; therefore, the model parameters need to be adjusted and optimized. The following hyperparameters were optimized and adjusted by the control variable method: learning rate, rate of dropout, mini-batch, and BN layer. The specific parameters to be adjusted are shown in
Table 3. The epoch was set to 50, and the average epoch duration was 9720 s. The damage recognition results of the CNN-LSTM model with different learning rates are plotted in
Figure 8. It should be noted that the accuracy is the ratio of the number of samples correctly localized in the validation set. Val-Mse is the mean square error between the prediction vector of the damage severity and the target vector.
Figure 8 indicates that under different learning rates, the loss of CNN-LSTM used for damage localization and severity prediction, respectively, shows a short horizontal segment in the second to eighth epoch, and then, it continues decreasing until the value stabilizes. As shown in
Figure 8a, the training speed of the damage localization is the fastest when the learning rate is 0.0001 and 0.0005, and the accuracy is higher under the same epoch, but the accuracy curve with a learning rate of 0.0005 is more volatile. Moreover,
Figure 8b shows that when the learning rate is 0.0005, the loss and Val-Mse for predicting damage severity are small. Therefore, the learning rates of the CNN-LSTM model used for damage localization and damage severity prediction were set as 0.0001 and 0.0005, respectively.
The final adjustment result of other hyperparameters is that the convolutional layer and the fully connected layer are added to the BN layer, the mini-batch is 64, and the fully connected layer does not use dropout.
3.5. Damage Localization of Suspension Bridge Hangers
Based on the trained CNN-LSTM model in
Section 3.4, the damage location of the test set is predicted. To intuitively display the performance of the proposed method, the number of samples for which the CNN-LSTM model correctly locates the damage in the test set is shown in
Table 4.
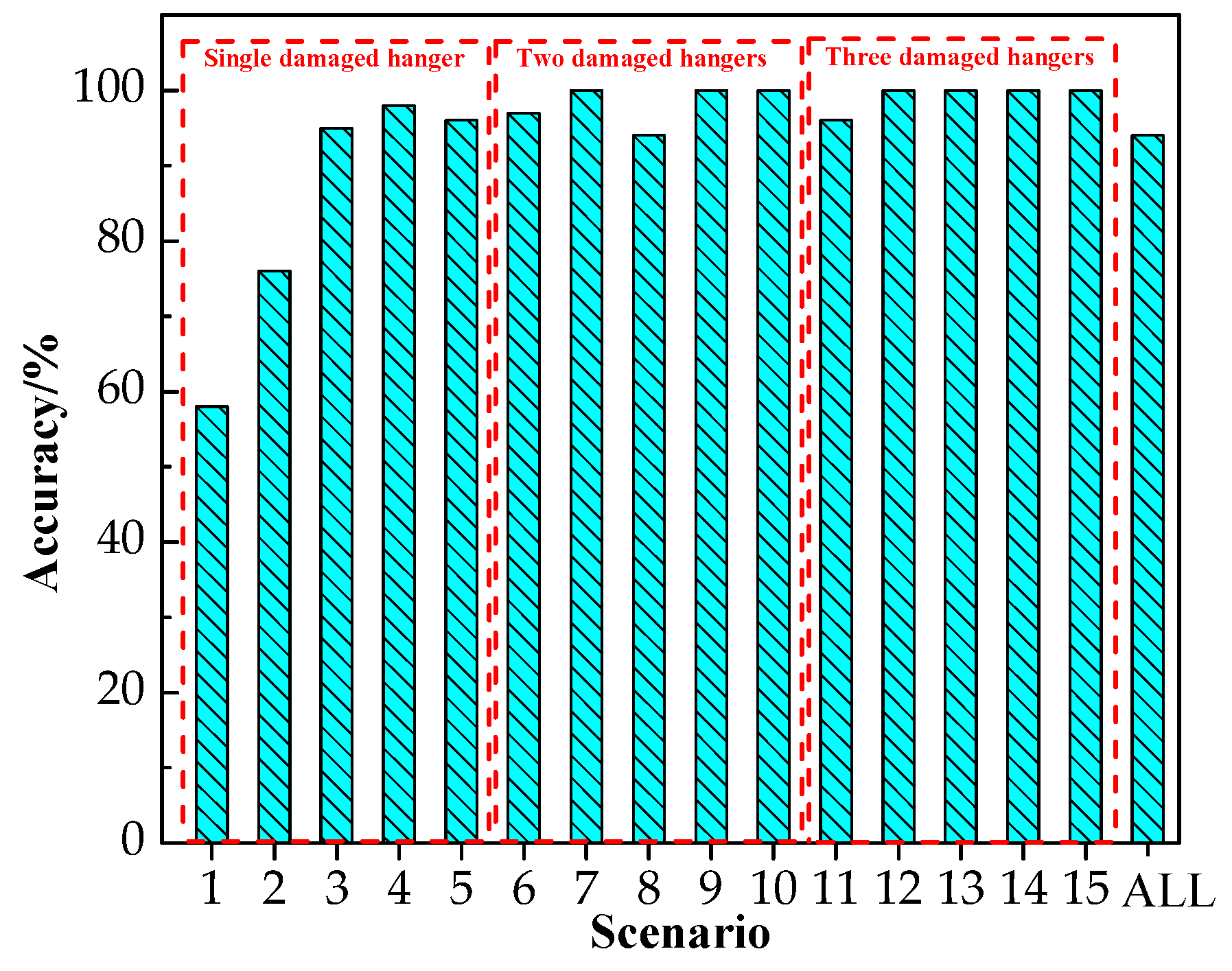
Figure 9 presents the accuracy of the damage localization of hangers under various damage scenarios. “All” in the figure denotes the accuracy of the entire test set, i.e., the average value of scenarios 1–15.
- (i)
The accuracy of damage localization of the hangers in the test set reaches 94.0%, showing that the proposed CNN-LSTM can effectively complete the task of damage localization.
- (ii)
Comparing the recognition results of different damage scenarios, the accuracy of the CNN-LSTM model in damage localization is between 58.0 and 100%. The accuracy in scenarios 1 and 2 is relatively low, i.e., 58 and 76%, respectively, and the accuracy of the other scenarios remains above 94%. The comparison results show that except for scenarios 1 and 2, the CNN-LSTM-based damage identification method has higher accuracy in locating the damage of hangers.
- (iii)
When comparing the recognition results of different damage types, the proposed method has little difference in the accuracy of a single damaged hanger, as well as two and three damaged hangers. The accuracy increases from 84.6 to 99.2%, which is an increase of approximately 15%. From the above results, it can be inferred that the accuracy of the proposed model in damage localization is less affected by the number of damaged hangers.
3.6. Damage Severity Prediction of Suspension Bridge Hangers
The absolute identification error (AIE) of the damage severity of the undamaged and damaged hangers under different damage scenarios is calculated in
Table 5.
It can be seen from
Table 5 that the AIE of damage severity prediction of undamaged hangers based on the CNN-LSTM model is in the range of 0.001–0.229%, where the average AIE of damage scenario 1 is the largest, and those of scenarios 12 and 13 are the smallest. Comparing the AIE of different damage types, the three damaged hangers are the lowest, the two damaged hangers are the second, and the single damaged hanger is relatively high. The AIE of the CNN-LSTM model for predicting the damage severity of damaged hangers is between 0.563 and 2.470%, where the AIE of each scenario of the single damage type is higher than that of the other damage types. According to the above analysis, the proposed model has high accuracy in predicting the severity of the undamaged hangers. The proposed model predicts that the damage severity of the damaged hangers generally performs well, but the prediction result for a single damaged hanger is relatively poor.
To evaluate the performance of the proposed damage identification method, the average relative identification error (ARIE) is used to evaluate the recognition effect of the proposed model on the prediction of the damage severity of hangers, which is expressed as:
where
is the prediction vector of damage severity,
is the target vector, and
n is the number of hangers under the corresponding scenarios.
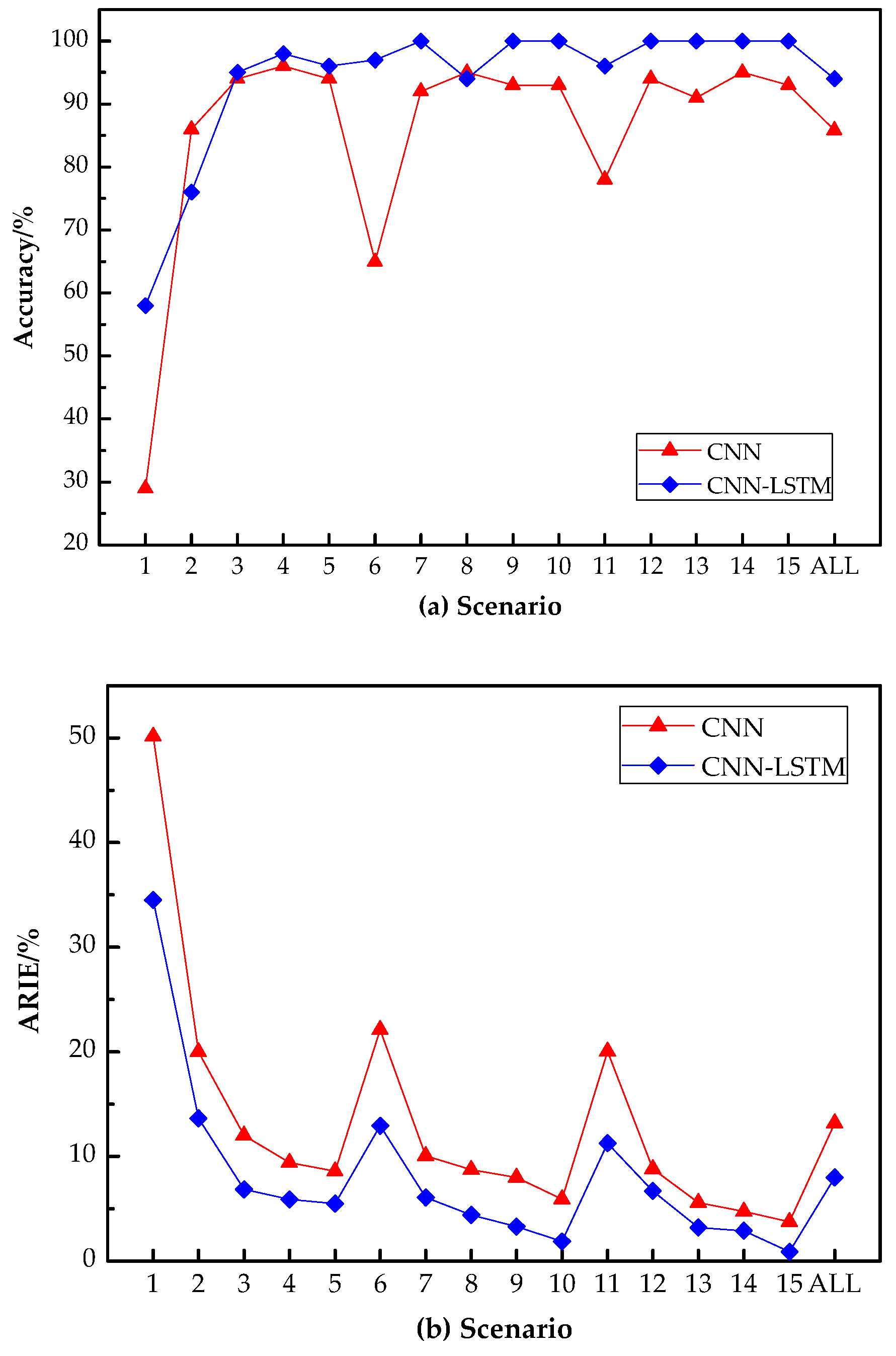
When calculating the ARIE, this study only focuses on the damaged hangers. The value of the evaluation index ARIE is calculated according to Equation (15) and presented in
Figure 10.
The following conclusions can be drawn from
Figure 10.
- (i)
The ARIE of the CNN-LSTM model for the damage severity prediction of hangers is 8.0% in the test set. The ARIE under different damage scenarios is between 0.90 and 34.52%, and the ARIE under most damage scenarios is below 7.0%.
- (ii)
For the same damage type, the ARIE decreases as the damage severity increases. The single damage scenarios decrease the fastest, with a decrease of approximately 29.03%, and the two and three damaged scenarios decrease by 11.06 and 10.37%, respectively. It can also be found from the ARIE results of the different damage severities that the CNN-LSTM model has relatively small prediction errors for larger damage severities (≥15%), while the accuracy of damage prediction for smaller damage severities (such as 5%) is poor.
- (iii)
For the same damage severity, as the number of damaged hangers increases, ARIE shows an overall downward trend.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}