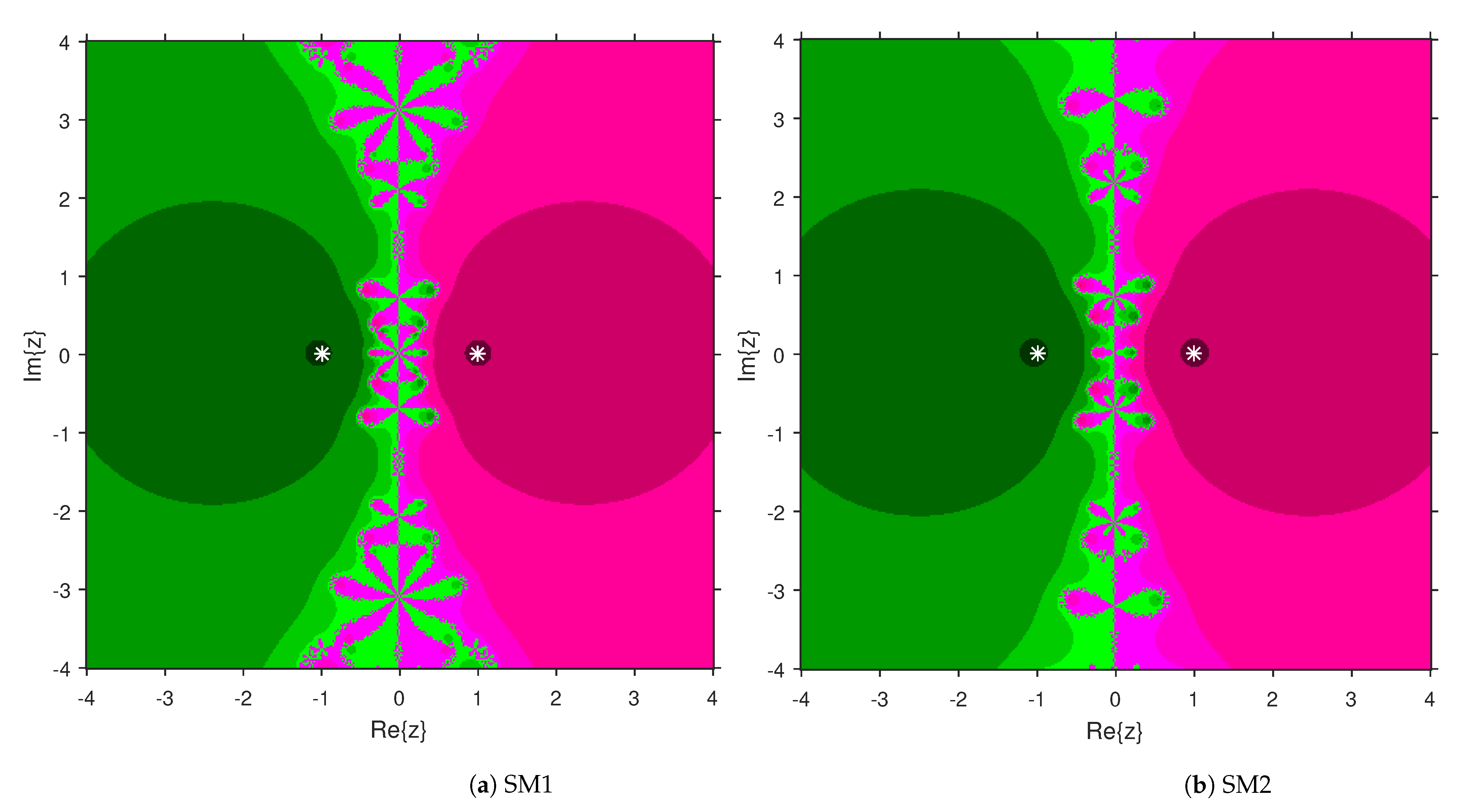
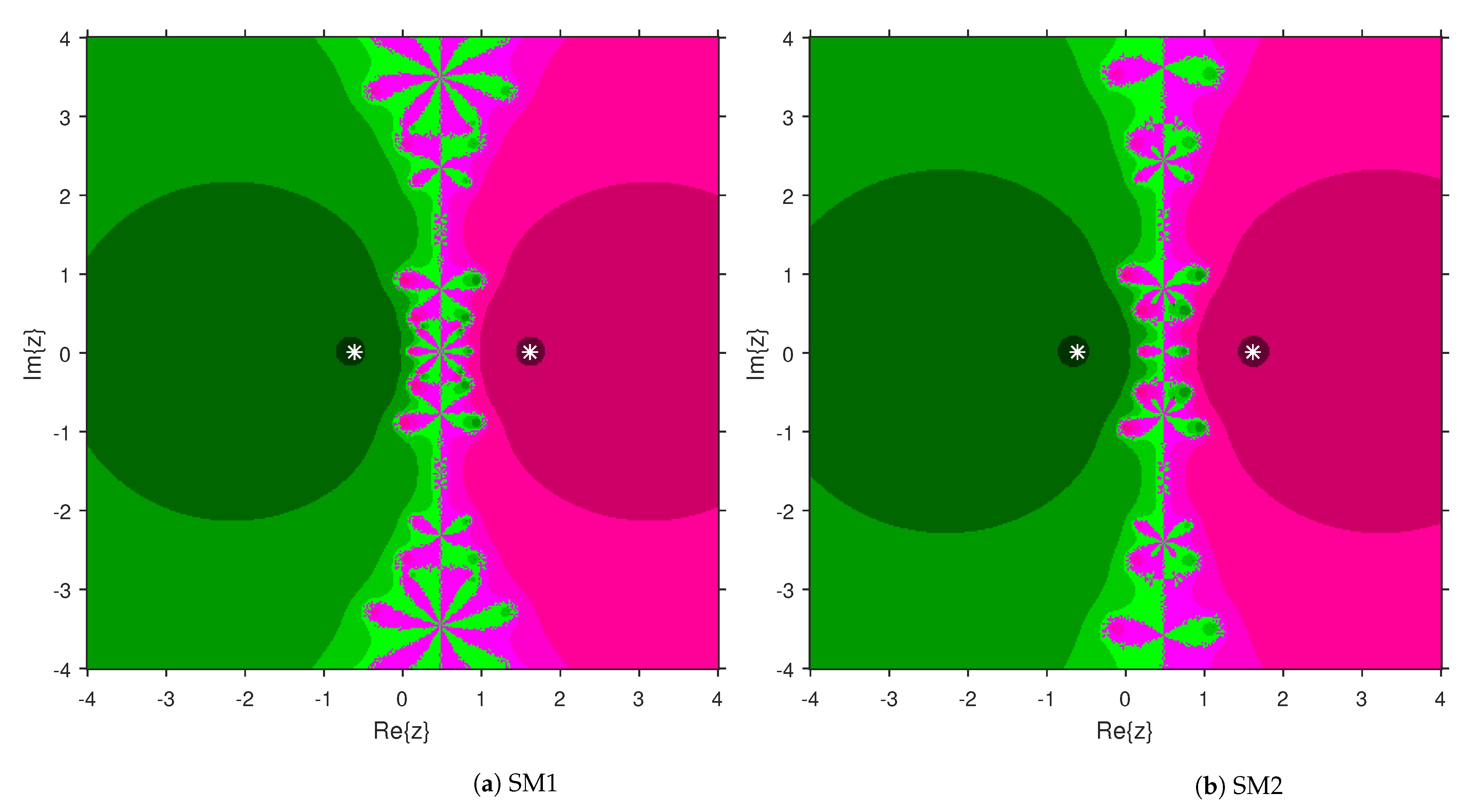
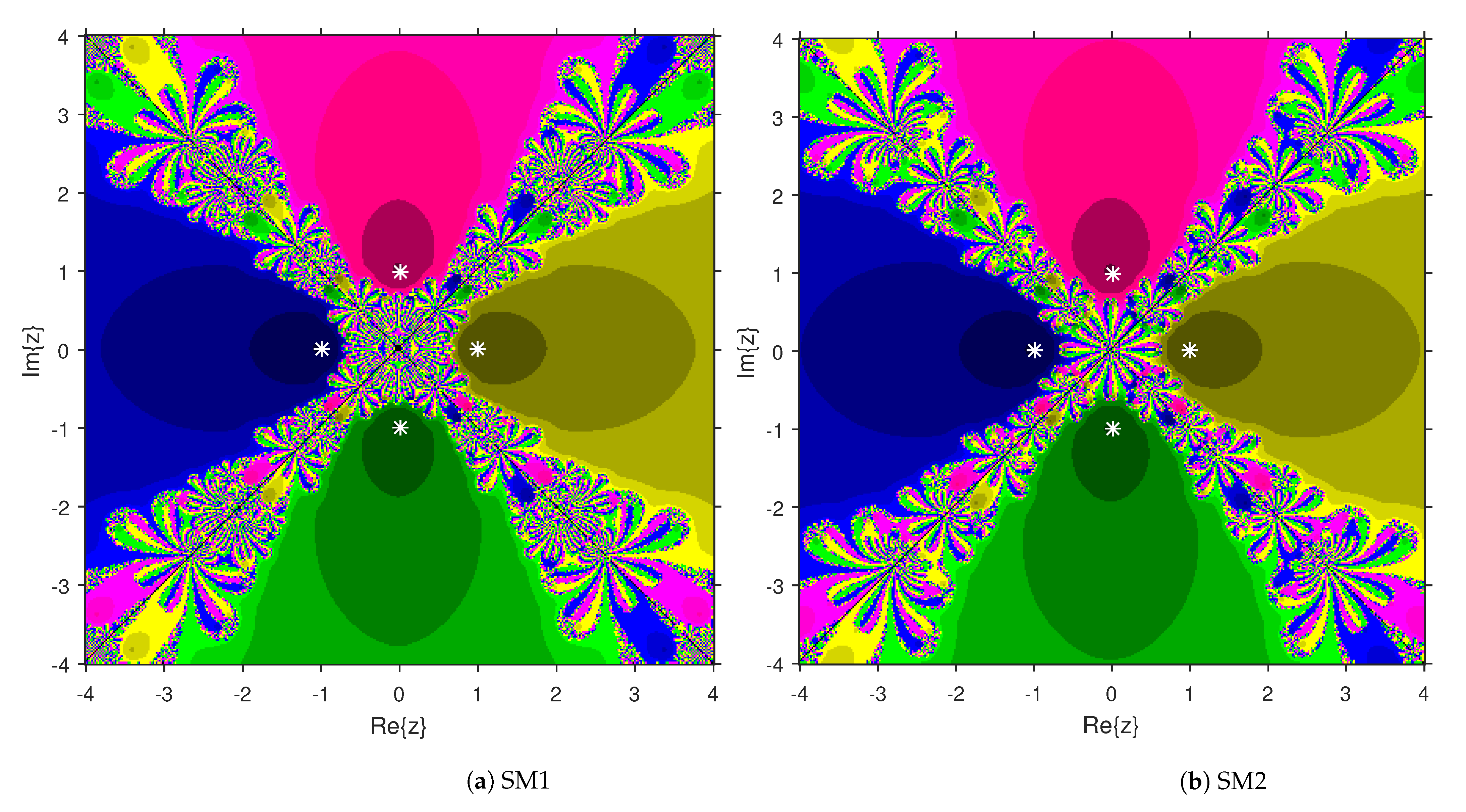
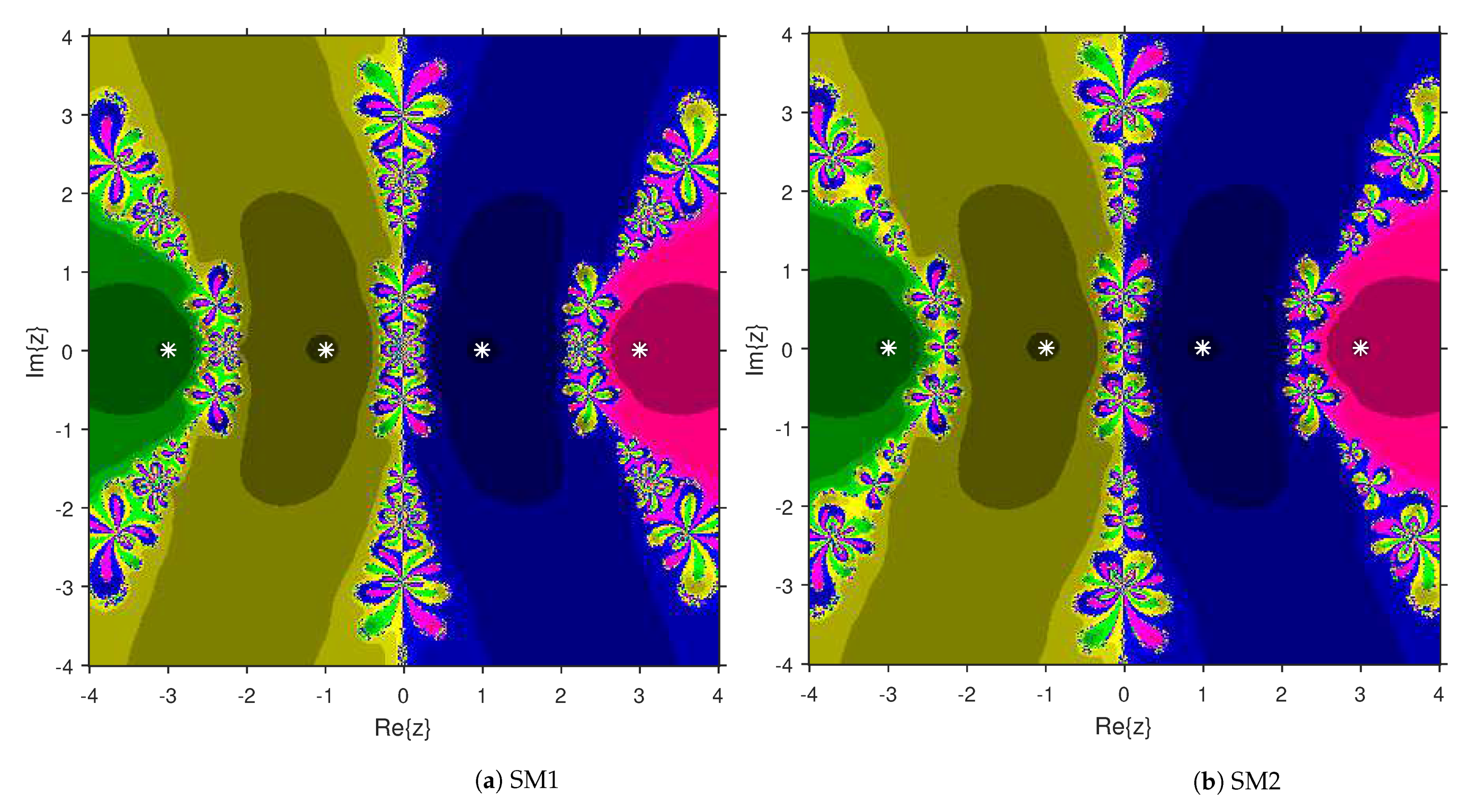
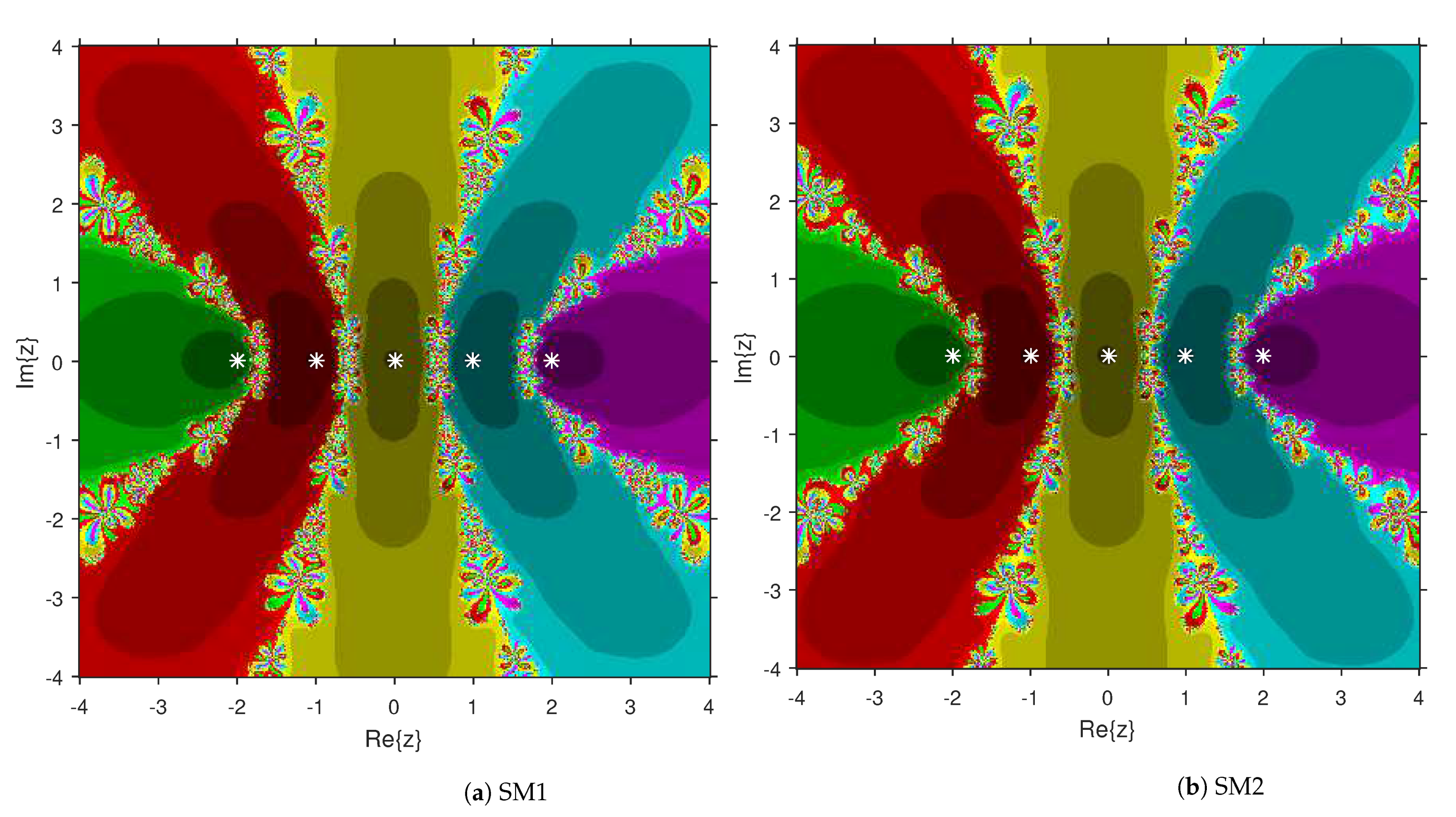
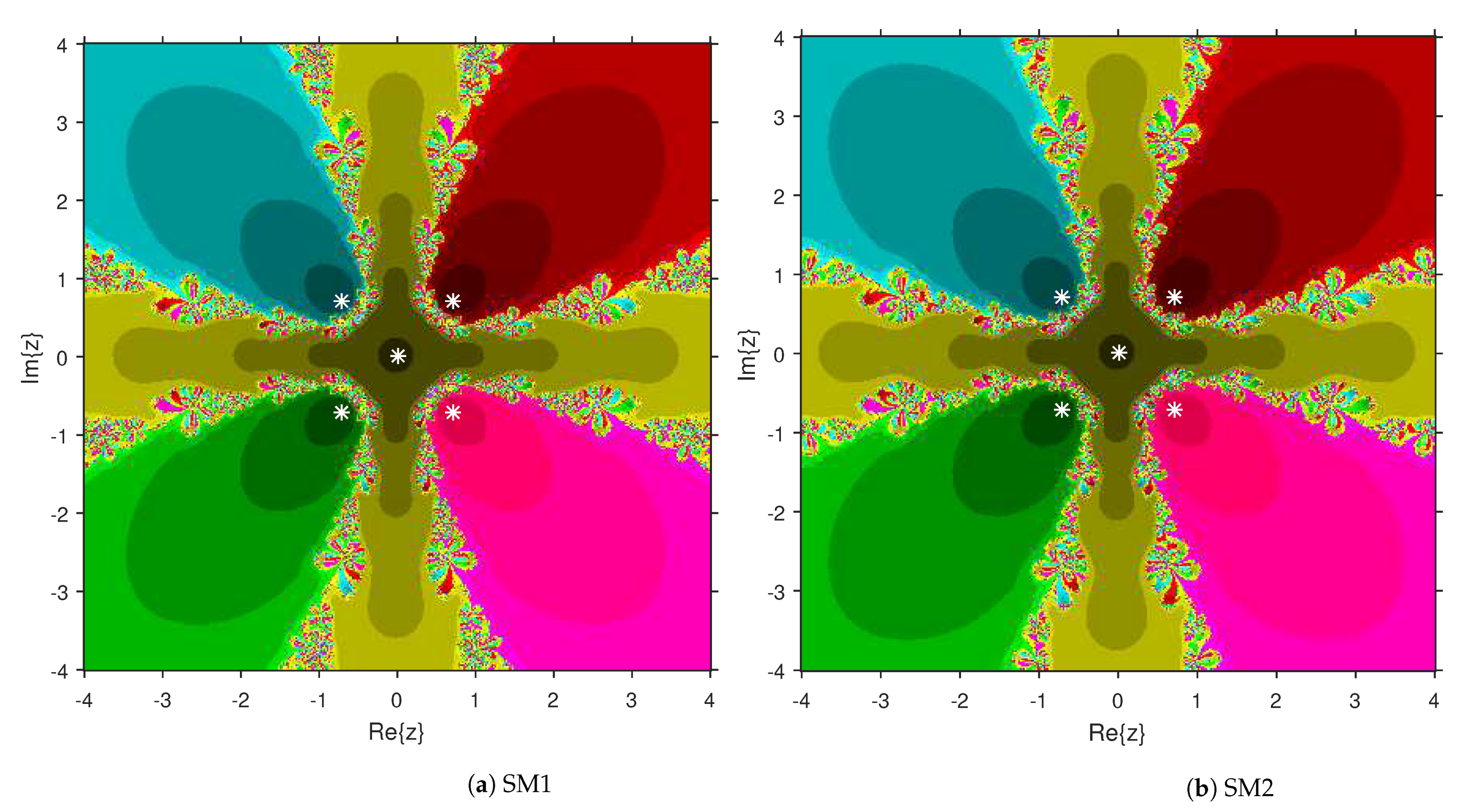
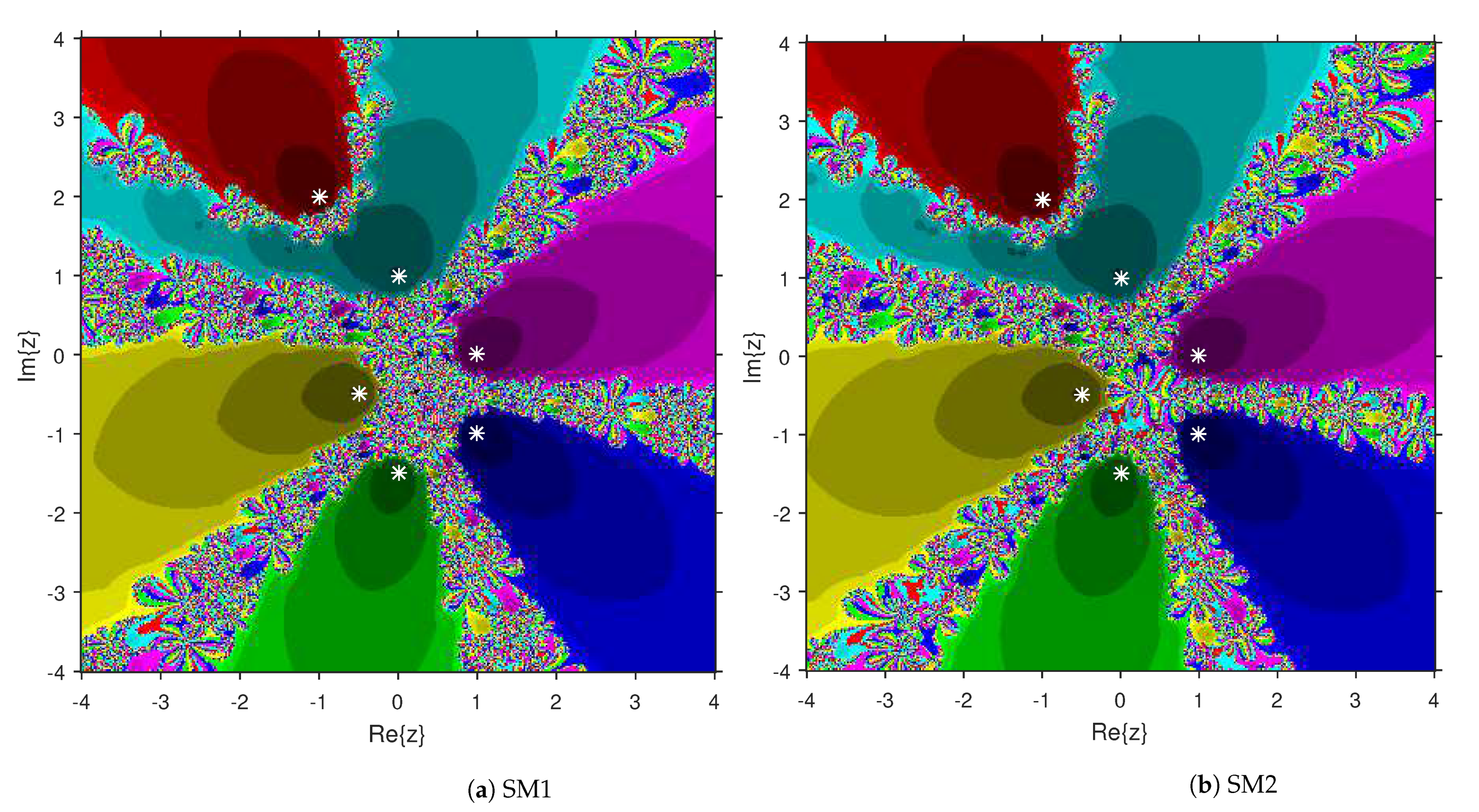
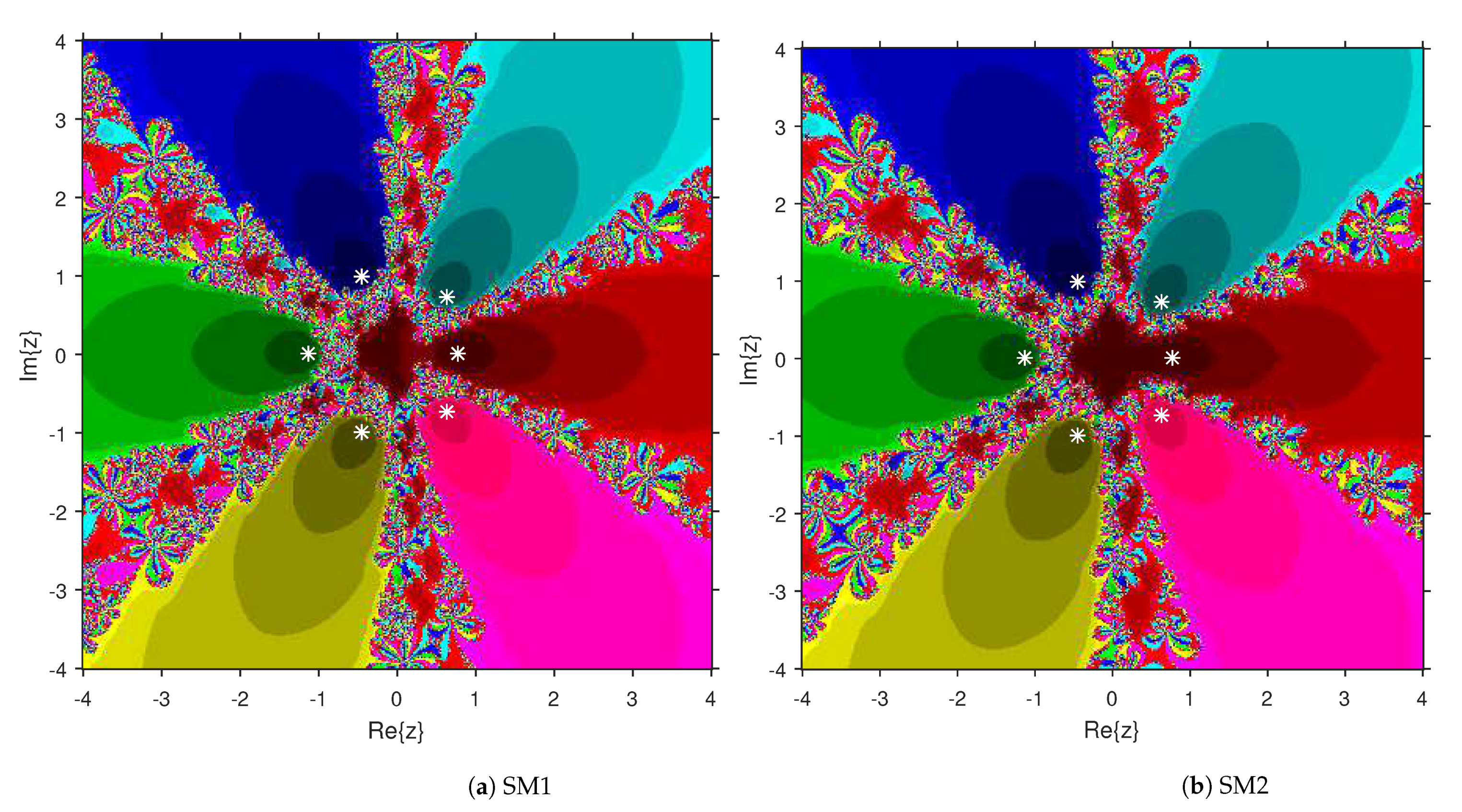
Comparison of the dynamical qualities of SM1 and SM2 are provided in this section by employing the tool attraction basin. Suppose is the notation for a second or higher degree complex polynomial. Then, the set represents the attraction basin corresponding to a zero of , where is formed by an iterative algorithm with a starting choice . Let us select a region × on with a grid of points. To prepare attraction basins, we apply SM1 and SM2 on variety of complex polynomials by selecting every point as a stater. The point remains in the basin of a zero of a considered polynomial if . Then, we display with a fixed color corresponding to . As per the number of iterations, we employ the light to dark colors to each . Black color is the sign of non-convergence zones. The terminating condition of the iteration is with the maximum limit of 300 iterations. We used MATLAB 2019a to design the fractal pictures.
This numerical experiment begins with polynomials
and
of degree two. These polynomials are used to compare the attraction basins for SM1 and SM2. The results of comparison are displayed in
Figure 1 and
Figure 2. In
Figure 1, green and pink areas indicate the attraction basins corresponding to the zeros
and 1, respectively, of
. The basins of the solutions
and
of
are shown in
Figure 2 by applying pink and green colors, respectively.
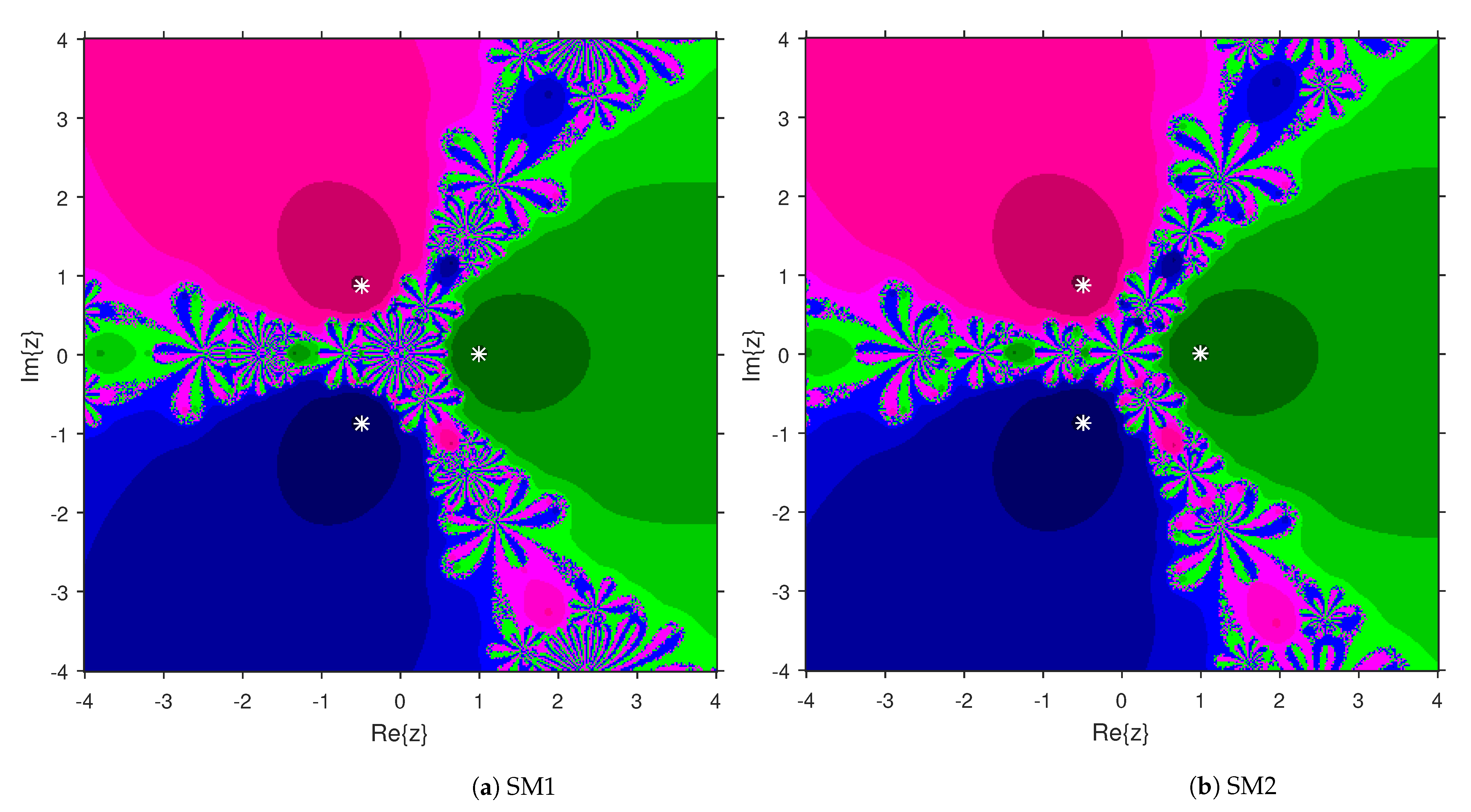
Figure 3 and
Figure 4 offer the attraction basins for SM1 and SM2 associated to the zeros of
and
. In
Figure 3, the basins of the solutions
, 1 and
of
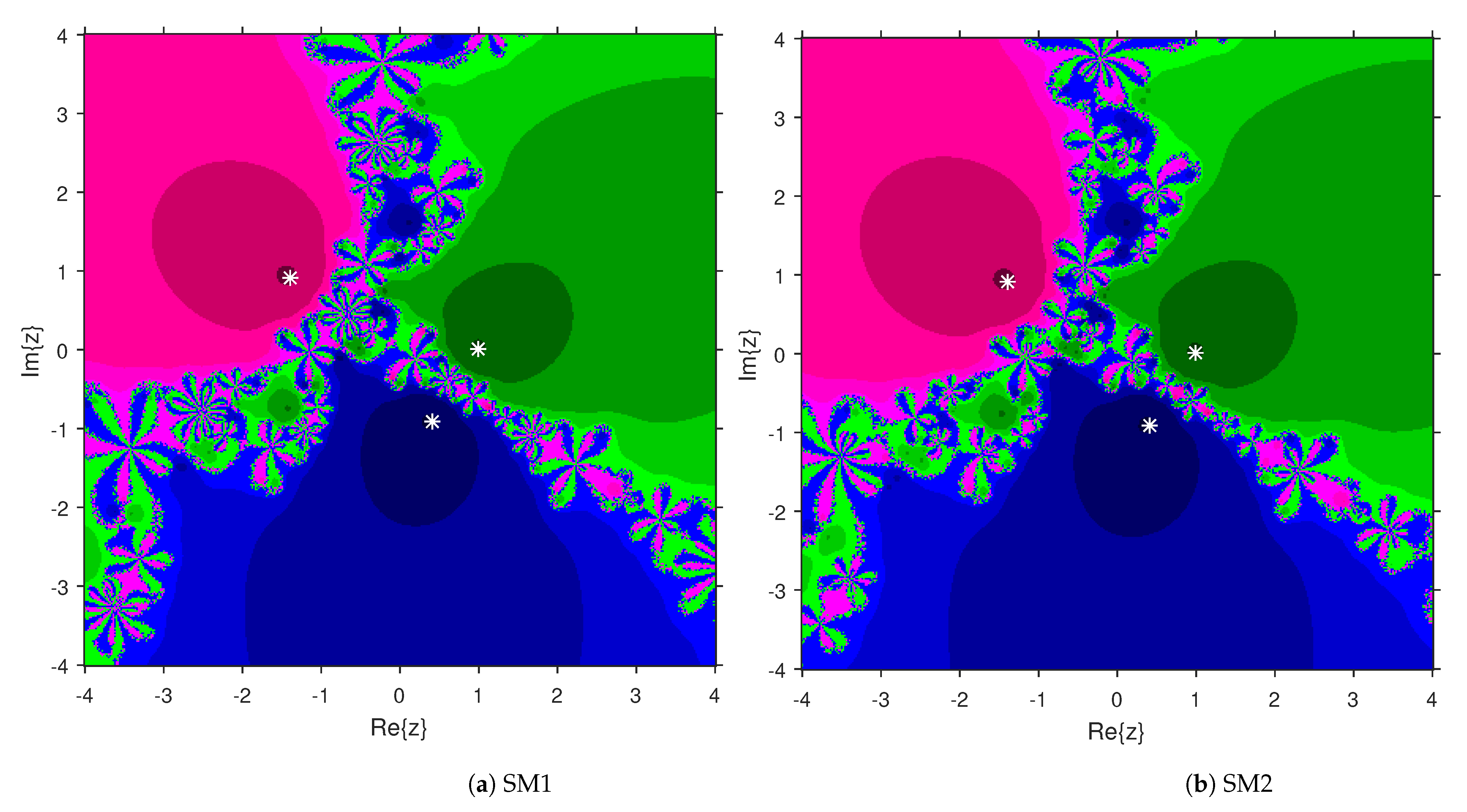
are painted in blue, green and pink, respectively. The basins for SM1 and SM2 associated to the zeros 1,
and
of
are given in
Figure 4 by means of green, pink and blue regions, respectively. Next, we use polynomials
and
of degree four to compare the attraction basins for SM1 and SM2.
Figure 5 provides the comparison of basins for these algorithms associated to the solutions 1,
,
i and
of
, which are denoted in yellow, green, pink and blue regions. The basins for SM1 and SM2 corresponding to the zeros
, 3,
and 1 of
are demonstrated in
Figure 6 using yellow, pink, green and blue colors, respectively. Moreover, we select polynomials
and
of degree five to design and compare the attraction basins for SM1 and SM2.
Figure 7 gives the basins of zeros 0, 2,
,
and 1 of
in yellow, magenta, red, green and cyan colors, respectively. In
Figure 8, green, cyan, red, pink and yellow regions illustrate the attraction basins of the solutions
,
,
,
and 0, respectively, of
. Lastly, sixth degree complex polynomials
and
are considered. In
Figure 9, the attraction basins for SM1 and SM2 corresponding to the zeros
,
,
, 1,
i and
of
are given in blue, yellow, green, magenta, cyan and red colors, respectively. In
Figure 10, green, pink, red, yellow, cyan and blue colors are applied to illustrate the basins related to the solutions
,
,
,
,
and
of
, respectively. In these
Figure 1,
Figure 2,
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10, the roots of the considered polynomials are displayed using white *.



 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}