
Mapping Boreal Forest Spruce Beetle Health Status at the Individual Crown Scale Using Fused Spectral and Structural Data


Abstract
:1. Introduction
2. Materials and Methods
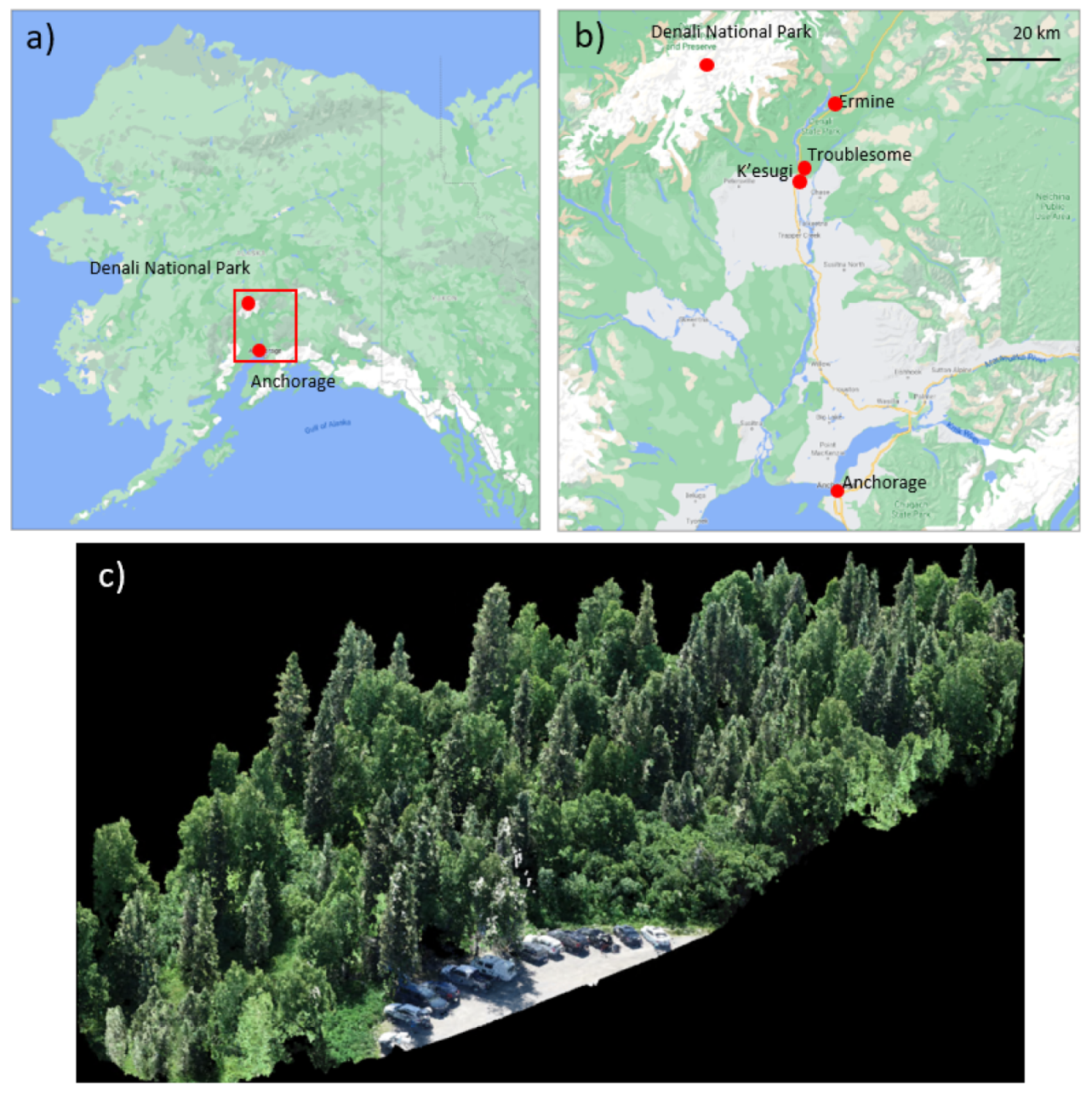
2.1. Study Area
2.2. Field Data Acquisition
2.3. UAV Data Collection and Processing
2.4. G-LiHT Data Collection and Processing
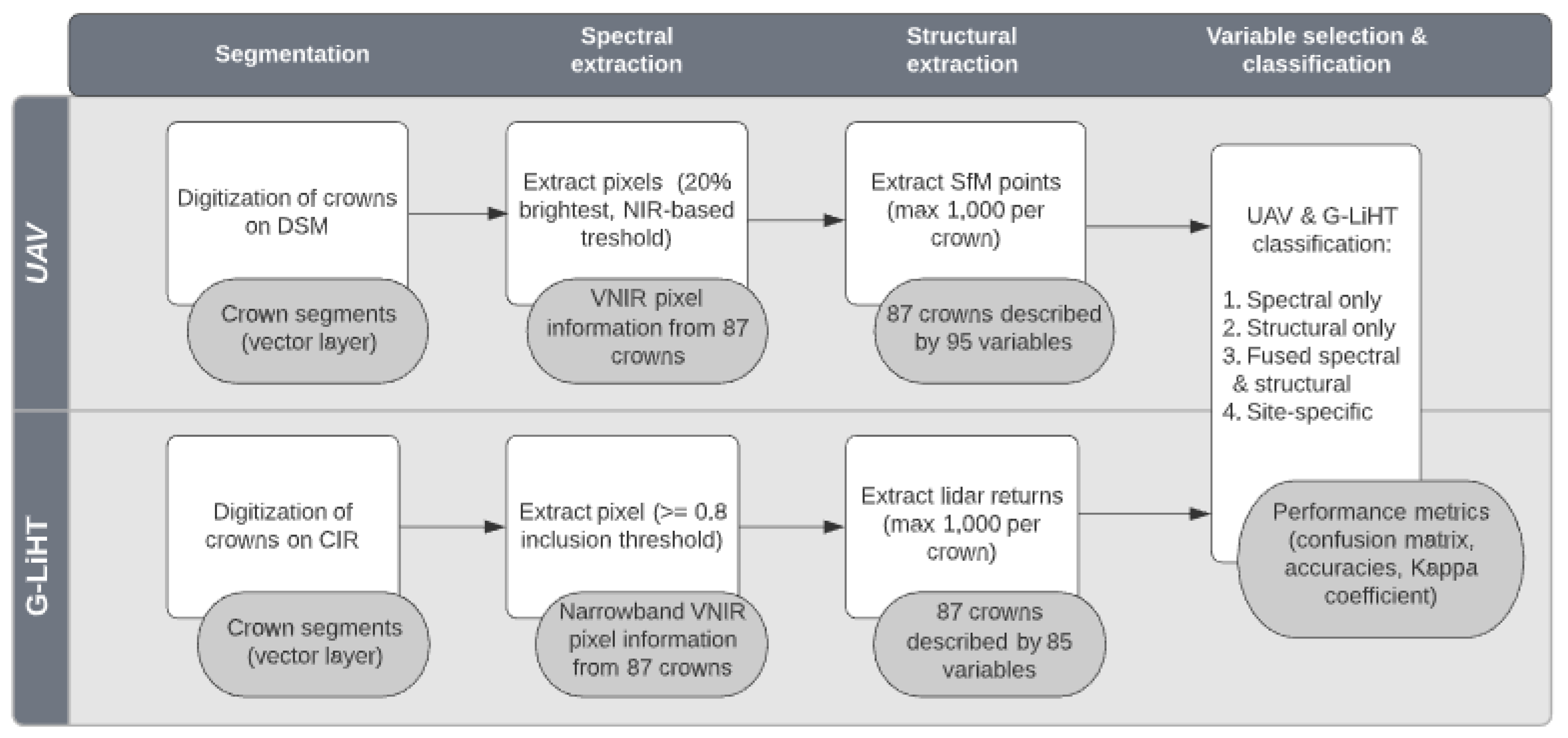
2.5. Crown Delineation and Feature Extraction
2.5.1. Extraction of Pixel-Based Spectral Information from UAV and G-LiHT Imagery
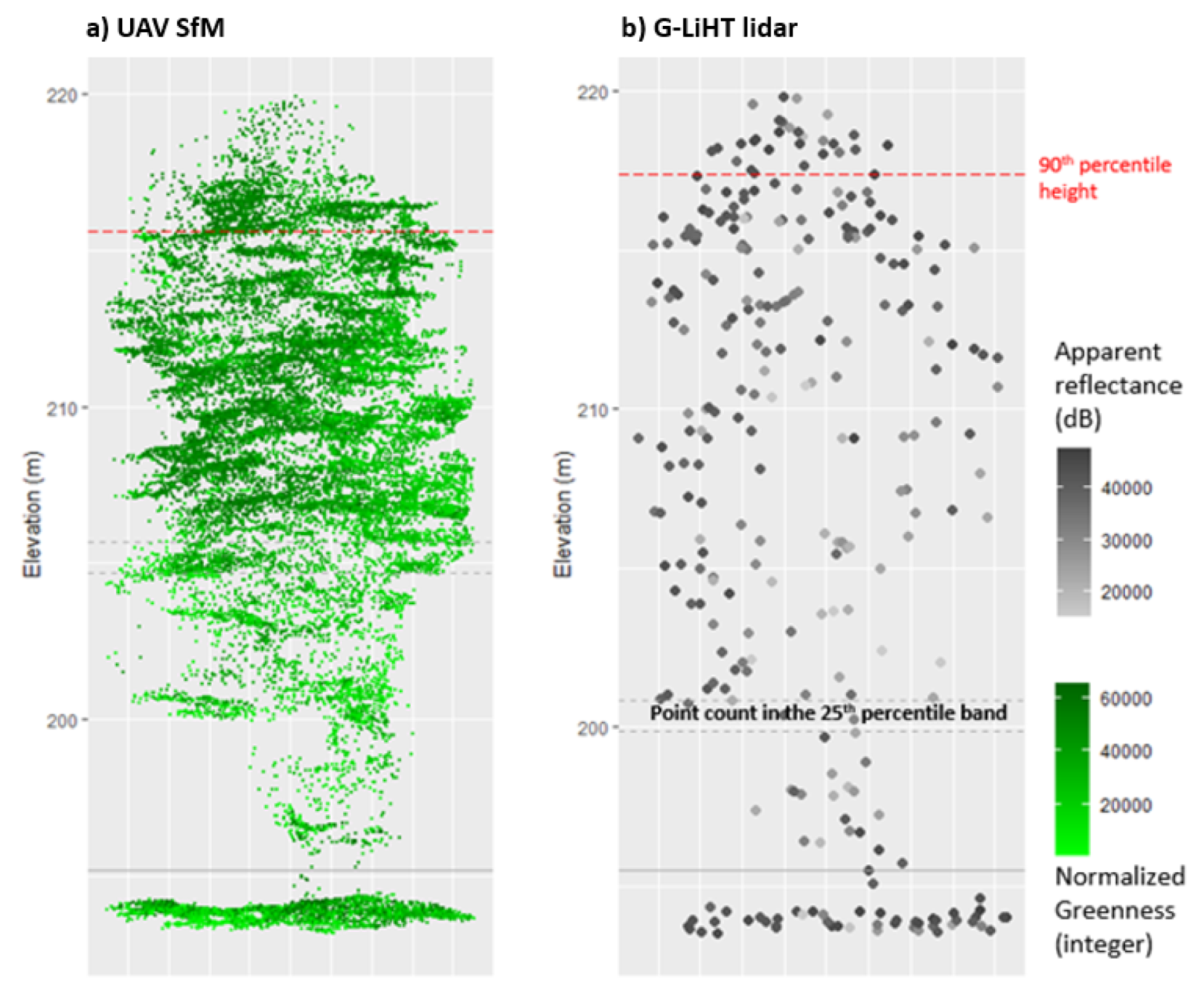
2.5.2. Extraction of Structural Metrics from UAV SfM
2.5.3. Extraction of Structural Metrics from Lidar Data
2.6. Random Forest
2.7. Data Fusion and Classification
2.7.1. Classifying Spectral and Structural Information Separately
2.7.2. Classification Using Fused Spectral and Structural Data
2.8. Feature Selection
3. Results
3.1. Classification Results
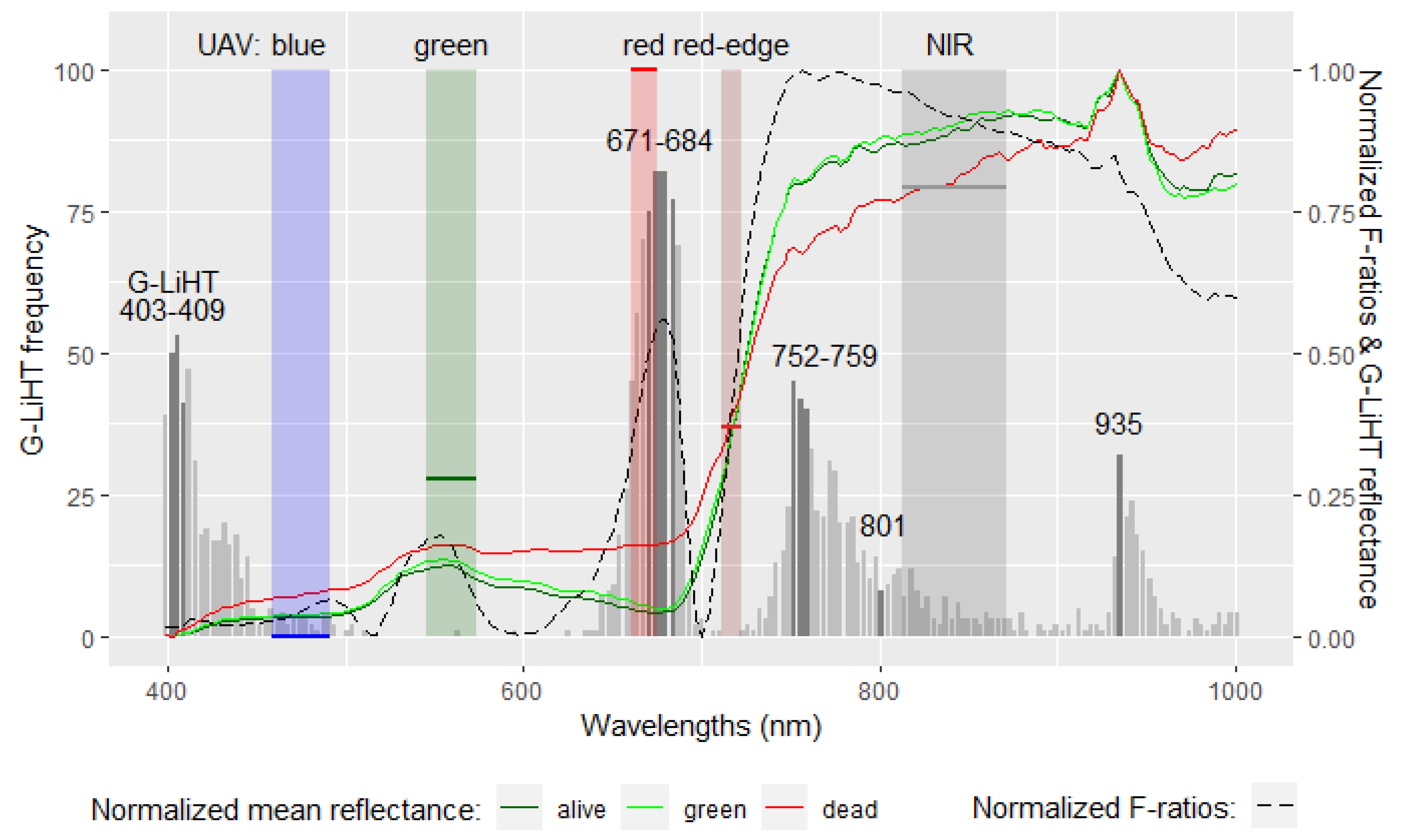
3.2. Most Important Spectral Features
3.3. Most Important Structural Features
4. Discussion
4.1. Classification of Health Status Groups
4.2. Contribution to Classification: Spectral Regions
4.3. Contribution to Classification: Structural Metrics
4.4. Site-Specific Differences
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Holsten, E.H.; Thier, R.W.; Munson, K.E.; Gibson, S.A. The Spruce Beetle. U.S. Dep. Agric. For. Serv. 1999, 127, 1–10. [Google Scholar]
- Bentz, B.J.; Régnière, J.; Fettig, C.J.; Hansen, E.M.; Hayes, J.L.; Hicke, J.A.; Kelsey, R.G.; Negrón, J.F.; Seybold, S.J. Climate Change and Bark Beetles of the Western United States and Canada: Direct and Indirect Effects. Bioscience 2010, 60, 602–613. [Google Scholar] [CrossRef]
- USDA Forest Service. Forest Health Conditions in Alaska-2020; USDA Forest Service: Washington, DC, USA, 2021.
- Jenkins, M.J.; Hebertson, E.G.; Munson, A.S. Spruce Beetle Biology, Ecology and Management in the Rocky Mountains: An Addendum to Spruce Beetle in the Rockies. Forests 2014, 5, 21–71. [Google Scholar] [CrossRef] [Green Version]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef] [Green Version]
- Foster, A.C.; Walter, J.A.; Shugart, H.H.; Sibold, J.; Negron, J. Spectral evidence of early-stage spruce beetle infestation in Engelmann spruce. For. Ecol. Manag. 2017, 384, 347–357. [Google Scholar] [CrossRef] [Green Version]
- Abdullah, H.; Darvishzadeh, R.; Skidmore, A.K.; Groen, T.A.; Heurich, M. European spruce bark beetle (Ips typographus, L.) green attack affects foliar reflectance and biochemical properties. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 199–209. [Google Scholar] [CrossRef] [Green Version]
- Abdullah, H.; Skidmore, A.K.; Darvishzadeh, R.; Heurich, M. Sentinel-2 accurately maps green-attack stage of European spruce bark beetle (Ips typographus, L.) compared with Landsat-8. Remote Sens. Ecol. Conserv. 2019, 5, 87–106. [Google Scholar] [CrossRef] [Green Version]
- Schmid, J.M.; Frye, R.H. Spruce Beetle in the Rockies. USFS Gen. Tech. Rep. 1977, 49, 38. [Google Scholar]
- Abdullah, H.; Skidmore, A.K.; Darvishzadeh, R.; Heurich, M. Timing of red-edge and shortwave infrared reflectance critical for early stress detection induced by bark beetle (Ips typographus, L.) attack. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101900. [Google Scholar] [CrossRef]
- Joyce, K.; Anderson, K.; Bartolo, R. Of Course We Fly Unmanned—We’re Women! Drones 2021, 5, 21. [Google Scholar] [CrossRef]
- Barbedo, J. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Dial, R.J.; Schulz, B.K.; Andersen, H.-E.; Lewis-Clark, E.; Cook, B.D.; Morton, D.C. Mapping tall shrub biomass in Alaska at landscape scale using structure-from-motion photogrammetry and lidar. Remote Sens. Environ. 2020, 245, 111841. [Google Scholar] [CrossRef]
- Niemann, K.O.; Quinn, G.; Stephen, R.; Visintini, F.; Parton, D. Hyperspectral Remote Sensing of Mountain Pine Beetle with an Emphasis on Previsual Assessment. Can. J. Remote Sens. 2015, 41, 191–202. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Blomqvist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Blomqvist, M.; Kosunen, M.; Starr, M.; Kantola, T.; Holopainen, M.; Lyytikäinen-Saarenmaa, P. Modelling the predisposition of Norway spruce to Ips typographus L. infestation by means of environmental factors in southern Finland. Eur. J. For. Res. 2018, 137, 675–691. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef] [Green Version]
- Alonzo, M.; Andersen, H.-E.; Morton, D.C.; Cook, B.D. Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned aerial vehicles (UAV) for assessment of qualitative classification of Norway spruce in temperate forest stands. Geo-Spat. Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef] [Green Version]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Minařík, R.; Langhammer, J. Use of a multispectral UAV photogrammetry for detection and tracking of forest disturbance dynamics. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 41, 711–718. [Google Scholar] [CrossRef] [Green Version]
- Babcock, C.; Finley, A.O.; Cook, B.D.; Weiskittel, A.; Woodall, C.W. Modeling forest biomass and growth: Coupling long-term inventory and LiDAR data. Remote Sens. Env. 2016, 182, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Popescu, S.C.; Wynne, R.H.; Scrivani, J.A. Fusion of small-footprint lidar and multispectral data to estimate plot-level volume and biomass in deciduous and pine forests in Virginia, USA. For. Sci. 2004, 50, 551–565. [Google Scholar]
- Reutebuch, S.E.; Andersen, H.-E.; McGaughey, R.J. Light detection and ranging (LIDAR): An emerging tool for multiple resource inventory. J. For. 2005, 103, 286–292. [Google Scholar]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Remote Sensing of Environment Lidar Sampling for Large-Area Forest Characterization: A Review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Junttila, S.; Holopainen, M.; Vastaranta, M.; Lyytikäinen-Saarenmaa, P.; Kaartinen, H.; Hyyppä, J.; Hyyppä, H. The potential of dual-wavelength terrestrial lidar in early detection of Ips typographus (L.) infestation—Leaf water content as a proxy. Remote Sens. Environ. 2019, 231, 111264. [Google Scholar] [CrossRef]
- Dietrich, J.T. Riverscape mapping with helicopter-based Structure-from-Motion photogrammetry. Geomorphology 2016, 252, 144–157. [Google Scholar] [CrossRef]
- White, J.C.; Saarinen, N.; Kankare, V.; Wulder, M.; Hermosilla, T.; Coops, N.C.; Pickell, P.D.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Confirmation of post-harvest spectral recovery from Landsat time series using measures of forest cover and height derived from airborne laser scanning data. Remote Sens. Environ. 2018, 216, 262–275. [Google Scholar] [CrossRef]
- Cook, B.D.; Corp, L.A.; Nelson, R.F.; Middleton, E.M.; Morton, D.C.; McCorkel, J.T.; Masek, J.G.; Ranson, K.J.; Ly, V.; Montesano, P.M. NASA Goddard’s LiDAR, hyperspectral and thermal (G-LiHT) airborne imager. Remote Sens. 2013, 5, 4045–4066. [Google Scholar] [CrossRef] [Green Version]
- Hopkinson, C.; Chasmer, L. Testing LiDAR models of fractional cover across multiple forest ecozones. Remote Sens. Environ. 2009, 113, 275–288. [Google Scholar] [CrossRef]
- Kim, S.; McGaughey, R.J.; Andersen, H.-E.; Schreuder, G. Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens. Environ. 2009, 113, 1575–1586. [Google Scholar] [CrossRef]
- Archer, K.; Kimes, R.V. Empirical characterization of random forest variable importance measures. Comput. Stat. Data Anal. 2008, 52, 2249–2260. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and Regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Alonzo, M.; Bookhagen, B.; Roberts, D.A. Urban tree species mapping using hyperspectral and lidar data fusion. Remote Sens. Environ. 2014, 148, 70–83. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Koch, B. An angular vegetation index for imaging spectroscopy data—Preliminary results on forest damage detection in the Bavarian National Park, Germany. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 308–321. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.; Pearse, G.D.; Heaphy, M.; Dungey, H. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Huo, L.; Persson, H.J.; Lindberg, E. Early detection of forest stress from European spruce bark beetle attack, and a new vegetation index: Normalized distance red & SWIR (NDRS). Remote Sens. Environ. 2021, 255, 112240. [Google Scholar] [CrossRef]
- Smith, K.; Steven, M.; Colls, J. Use of hyperspectral derivative ratios in the red-edge region to identify plant stress responses to gas leaks. Remote Sens. Environ. 2004, 92, 207–217. [Google Scholar] [CrossRef]
- European Space Agency. Sentinel Online. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/sentinel-2-msi/resolutions/spatial (accessed on 10 August 2021).
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Hall, R.; Castilla, G.; White, J.; Cooke, B.; Skakun, R. Remote sensing of forest pest damage: A review and lessons learned from a Canadian perspective. Can. Èntomol. 2016, 148, S296–S356. [Google Scholar] [CrossRef]
- Wulder, M.A.; Dymond, C.C.; White, J.; Leckie, D.G.; Carroll, A.L. Surveying mountain pine beetle damage of forests: A review of remote sensing opportunities. For. Ecol. Manag. 2006, 221, 27–41. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site (Area) | Crowns | Non-Infested | Green | Dead | Data Acquisition | Solar Zenith Angle | Weather |
|---|---|---|---|---|---|---|---|
| Troublesome (80,900 m2) | 31 | 11 | 9 | 11 | 20 July 2018, 18:00 | 57.5° | Clear skies |
| Ermine (103,900 m2) | 36 | 4 | 32 | --- | 22 July 2018, 12:00 | 42.2° | Clear skies |
| K’esugi (104,200 m2) | 20 | 6 | 7 | 7 | 17 July 2018, 14:00 | 47.4° | Variable clouds |
| Totals | 87 | 21 | 48 | 18 |
| Variable | Description |
|---|---|
| brightness_mean | Mean overall brightness |
| brightness_med | Median overall brightness |
| brightness_std | Standard deviation of overall brightness |
| brightness_skw | Skew of overall brightness |
| [color]_mean | Mean red, green, or blue brightness |
| [color]_med | Median red, green, or blue brightness |
| [color]_std | Standard deviation of red, green, or blue brightness |
| [color]_skw | Skew of red, green, or blue brightness |
| [color]_norm_mean | Mean normalized red, green, or blue brightness |
| [color]_norm_med_lower50 | Median normalized red, green, or blue brightness of points below median height |
| [color]_norm_med_upper50 | Median normalized red, green, or blue brightness of points above median height |
| [color]_ratio_upper_lower | Ratio of red, green, or blue brightness between points above and points below median height |
| [color]_norm_med_25th | Median normalized red, green, or blue brightness of points within ±0.05 m of 25th percentile height |
| [color]_norm_med_75th | Median normalized red, green, or blue brightness of points within ±0.05 m of 75th percentile height |
| [color]_norm_med_99th | Median normalized red, green, or blue brightness of points above 99th percentile height |
| [color]_ratio_75_25 | Ratio of [color]_norm_med_75th to [color]_norm_med_25th for red, green, or blue brightness |
| [color]_25th | 25th percentile of red, green, or blue brightness |
| [color]_75th | 75th percentile of red, green, or blue brightness |
| HVAR | Variance of crown height |
| HSD | Standard deviation of crown height |
| HCV | Coefficient of variation of height |
| HKUR | Kurtosis of crown height |
| HSKE | Skew of crown height |
| TotalReturns | Total number of points |
| n_25 | Number of points within ±0.005 m of 25th percentile height |
| n_75 | Number of points within ±0.005 m of 75th percentile height |
| n_ratio_75_25 | Ratio of n_75 to n_25 |
| n_99 | Number of points above 99th percentile height |
| Variable | Description |
|---|---|
| IMAX | Max intensity |
| IMIN | Min intensity |
| IMEAN | Mean intensity |
| IMEDIAN | Median intensity |
| IMODE | Mode of intensity |
| IVAR | Variance of intensity |
| ISD | Standard deviation of intensity |
| ICV | Coefficient of variation of intensity |
| IKUR | Kurtosis of intensity |
| ISKE | Skew of intensity |
| I05TH, I10TH, I15TH, I20TH, I25TH | Percentiles of intensity (e.g., 5th percentile, 10th percentile, 15th percentile, etc.) |
| I30TH, I35TH, I40TH, I45TH, I50TH | |
| I55TH, I60TH, I65TH, I70TH, I75TH | |
| I80TH, I90TH, I95TH, I99TH | |
| HVAR | Variance of crown height |
| HSD | Standard deviation of crown height |
| HCV | Coefficient of variation of height |
| HKUR | Kurtosis of crown height |
| HSKE | Skew of crown height |
| TotalReturns | Total number of points |
| n_10, n_20, n_30, n_40, n_50, n_60 | Number of points between major height percentiles |
| n_70, n_80, n_90, n_100 | (e.g., n_20 = points between 10th and 20th percentiles) |
| n_ratio_30_10 | Ratio of n_30 to n_10 |
| n_ratio_90_10 | Ratio of n_90 to n_10 |
| n_ratio_90_20 | Ratio of n_90 to n_20 |
| n_ratio_80_10 | Ratio of n_80 to n_10 |
| n_ratio_80_20 | Ratio of n_80 to n_20 |
| n_ratio_70_10 | Ratio of n_70 to n_10 |
| n_ratio_70_20 | Ratio of n_70 to n_20 |
| (a) UAV Spectral | Actual Class | Total | User’s Accuracy | (b) G-LiHT Spectral | Actual Class | Total | User’s Accuracy | ||||
| Predicted Class | Alive | Green | Dead | Predicted Class | Alive | Green | Dead | ||||
| Alive | 7 | 14 | 1 | 22 | 0.32 | Alive | 11 | 20 | 0 | 31 | 0.35 |
| Green | 10 | 26 | 2 | 38 | 0.68 | Green | 7 | 25 | 0 | 32 | 0.78 |
| Dead | 4 | 8 | 15 | 27 | 0.56 | Dead | 3 | 3 | 18 | 24 | 0.75 |
| Total | 21 | 48 | 18 | 87 | Total | 21 | 48 | 18 | 87 | ||
| Producer’s accuracy | 0.33 | 0.54 | 0.83 | Producer’s accuracy | 0.52 | 0.52 | 1.00 | ||||
| Overall accuracy | 0.55 | Overall accuracy | 0.62 | ||||||||
| Kappa coefficient | 0.29 | Kappa coefficient | 0.42 | ||||||||
| (c) UAV Structural | Actual Class | Total | User’s Accuracy | (d) G-LiHT Structural | Actual Class | Total | User’s Accuracy | ||||
| Predicted Class | Alive | Green | Dead | Predicted Class | Alive | Green | Dead | ||||
| Alive | 14 | 8 | 4 | 26 | 0.54 | Alive | 15 | 9 | 0 | 24 | 0.63 |
| Green | 5 | 37 | 0 | 42 | 0.88 | Green | 3 | 34 | 0 | 37 | 0.92 |
| Dead | 2 | 3 | 14 | 19 | 0.74 | Dead | 3 | 5 | 18 | 26 | 0.69 |
| Total | 21 | 48 | 18 | 87 | Total | 21 | 48 | 18 | 87 | ||
| Producer’s accuracy | 0.67 | 0.77 | 0.78 | Producer’s accuracy | 0.71 | 0.71 | 1.00 | ||||
| Overall accuracy | 0.75 | Overall accuracy | 0.77 | ||||||||
| Kappa coefficient | 0.59 | Kappa coefficient | 0.64 | ||||||||
| (e) UAV Spectral-Structural Fusion | Actual Class | Total | User’s Accuracy | (f) G-LiHT Spectral-Structural Fusion | Actual Class | Total | User’s Accuracy | ||||
| Predicted Class | Alive | Green | Dead | Predicted Class | Alive | Green | Dead | ||||
| Alive | 13 | 7 | 2 | 22 | 0.59 | Alive | 15 | 10 | 0 | 25 | 0.60 |
| Green | 5 | 39 | 0 | 44 | 0.89 | Green | 5 | 35 | 0 | 40 | 0.88 |
| Dead | 3 | 2 | 16 | 21 | 0.76 | Dead | 1 | 3 | 18 | 22 | 0.82 |
| Total | 21 | 48 | 18 | 87 | Total | 21 | 48 | 18 | 87 | ||
| Producer’s accuracy | 0.62 | 0.81 | 0.89 | Producer’s accuracy | 0.71 | 0.73 | 1.00 | ||||
| Overall accuracy | 0.78 | Overall accuracy | 0.78 | ||||||||
| Kappa coefficient | 0.64 | Kappa coefficient | 0.65 | ||||||||
| Model | Final Variables Selected | Description | ||||
|---|---|---|---|---|---|---|
| UAV spectral | 840 | 717 | 668 | 560 | 475 | NIR, red-edge, red, green, and blue multispectral bands |
| UAV structural | green_norm_med_25th | Median normalized green brightness of points within ±0.05 m of 25th percentile height | ||||
| green_ratio_upper_lower | Ratio of green brightness between points above and points below median height | |||||
| blue_ratio_upper_lower | Ratio of blue brightness between points above and points below median height | |||||
| blue_norm_med_99th | Median normalized blue brightness of points above 99th percentile height | |||||
| redness_skw | Skew of red brightness | |||||
| G-LiHT spectral | 403 | 406 | 409 | Violet, red, red-edge, and near infrared hyperspectral bands | ||
| 671 | 674 | 677 | 680 | 684 | ||
| 752 | 756 | 759 | 801 | 935 | ||
| G-LiHT structural | I99TH | 99th percentile intensity | ||||
| HCV | Coefficient of variance of height | |||||
| ICV | Coefficient of variance of intensity | |||||
| IMEAN | Mean intensity | |||||
| n_70 | Lidar returns between 60th and 70th height percentiles | |||||
| n_ratio_70_10 | Ratio of n_70 and lidar returns below 10th percentile height | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cessna, J.; Alonzo, M.G.; Foster, A.C.; Cook, B.D. Mapping Boreal Forest Spruce Beetle Health Status at the Individual Crown Scale Using Fused Spectral and Structural Data. Forests 2021, 12, 1145. https://0-doi-org.brum.beds.ac.uk/10.3390/f12091145
Cessna J, Alonzo MG, Foster AC, Cook BD. Mapping Boreal Forest Spruce Beetle Health Status at the Individual Crown Scale Using Fused Spectral and Structural Data. Forests. 2021; 12(9):1145. https://0-doi-org.brum.beds.ac.uk/10.3390/f12091145
Chicago/Turabian StyleCessna, Janice, Michael G. Alonzo, Adrianna C. Foster, and Bruce D. Cook. 2021. "Mapping Boreal Forest Spruce Beetle Health Status at the Individual Crown Scale Using Fused Spectral and Structural Data" Forests 12, no. 9: 1145. https://0-doi-org.brum.beds.ac.uk/10.3390/f12091145