1. Introduction
An internal combustion engine (ICE) vehicle is the most common vehicle type that we see today. Despite its relatively low efficiency and high emission numbers, its advantages are too desirable and practical for daily use. However, as time goes on, the emissions caused by vehicles cannot be ignored anymore. A typical passenger car emits about 4.6 metric tons of carbon dioxide per year [
1].
One of the alternatives for substituting the ICE vehicles is electric vehicles. The advantages of electric vehicles over ICE vehicles are their high efficiency due to minimal power conversion, high electric component efficiency, and zero emissions during their operation [
2,
3]. Although the advantages look promising, electric vehicles still have one main problem: the low specific energy of batteries compared to gasoline or diesel [
4]. Currently, a typical lithium-ion battery’s specific energy is 80–130 Wh/kg [
5], while the specific energy of gasoline is about 13,200 Wh/kg [
6], a thousand times more than the battery. The low specific energy of batteries results in many batteries used in vehicles due to high energy needs [
7]. The higher number of batteries, the higher the cost. Moreover, the heavier the vehicle, the higher the energy consumption. The result is that the range of electric vehicles is usually not as far as ICE vehicles, causing range anxiety for the driver. Range anxiety is defined as the fear of fully depleting a BEV’s battery in the middle of a trip, leaving the driver stranded [
8].
Therefore, there are now more research projects on electric vehicles [
9,
10]. Fabianski and Wicher present a concept, development, and comparison of selected control algorithms used in the distributed control system of a three-wheeled vehicle [
11]. The research was conducted to obtain an electric vehicle with better performance to reduce the emission and range anxiety of the driver. However, it does not specifically address braking strategies and the addition of a RE. Adding RE is one way to modify an electric vehicle to have more on-board energy storage, better known as EREV (extended-range electric vehicle) [
12]. It is an electric vehicle with a small auxiliary power unit that functions as a generator that charges the electric vehicle’s battery when the state of charge (SoC) of the battery is low. The small auxiliary power unit is usually a small ICE. EREV offers low emission and high efficiency of a battery electric vehicle and has an ICE vehicle’s range capability if needed [
13]. Its auxiliary power unit will eliminate the range anxiety of the driver.
Many studies have been conducted regarding the use of range extenders for electric vehicles. Kerviel et al. show that the use of the range extender is truly promising [
14]. It was confirmed by Brito et al. when they developed and assessed an engine to be used as a range extender for electric vehicles [
15]. The engine in both studies is used as the main range enhancer for the electric vehicle. Furthermore, Waseem et al. present modeling of a three-wheeled electric vehicle and focus on the analysis of the gradient effect on the vehicle’s dynamic performance [
16]. Targosz et al. also modeled an electric vehicle, which focuses on electric racing cars [
17].
To obtain the best component configuration of electric vehicles, modeling of the energy management system is required. For example, Hmidi et al. were modeling the system and implementing the New European Driving Cycle (NEDC), which aims to minimize fuel consumption in hybrid vehicles [
18]. Another study was performed by Islameka et al. in which they compare the full mechanical, serial, and parallel braking strategies simulated on the WLTC Class 2 driving cycle [
19]. The result indicates that the use of serial braking systems produces the greatest efficiency compared to parallel and full mechanics braking systems. The resulting efficiency is 19.5km/kWh with the remaining battery SoC of 87.9%. Furthermore, Rahman et al. present the design and performance details of an extended-range electric city car propulsion system [
20], which focuses on using two engines, one for motors and one for generators. From these explanations, many research reports are still focused on one type of drivetrain only. Limited studies have compared various powertrain configurations, especially for different battery types, braking strategies, and range extender appearance. Selecting the configuration is an essential step in designing electric vehicles for obtaining the best energy efficiency.
This paper aims to develop a model for simulating both electrical and mechanical energy management systems of the electric trike as good delivery services (See
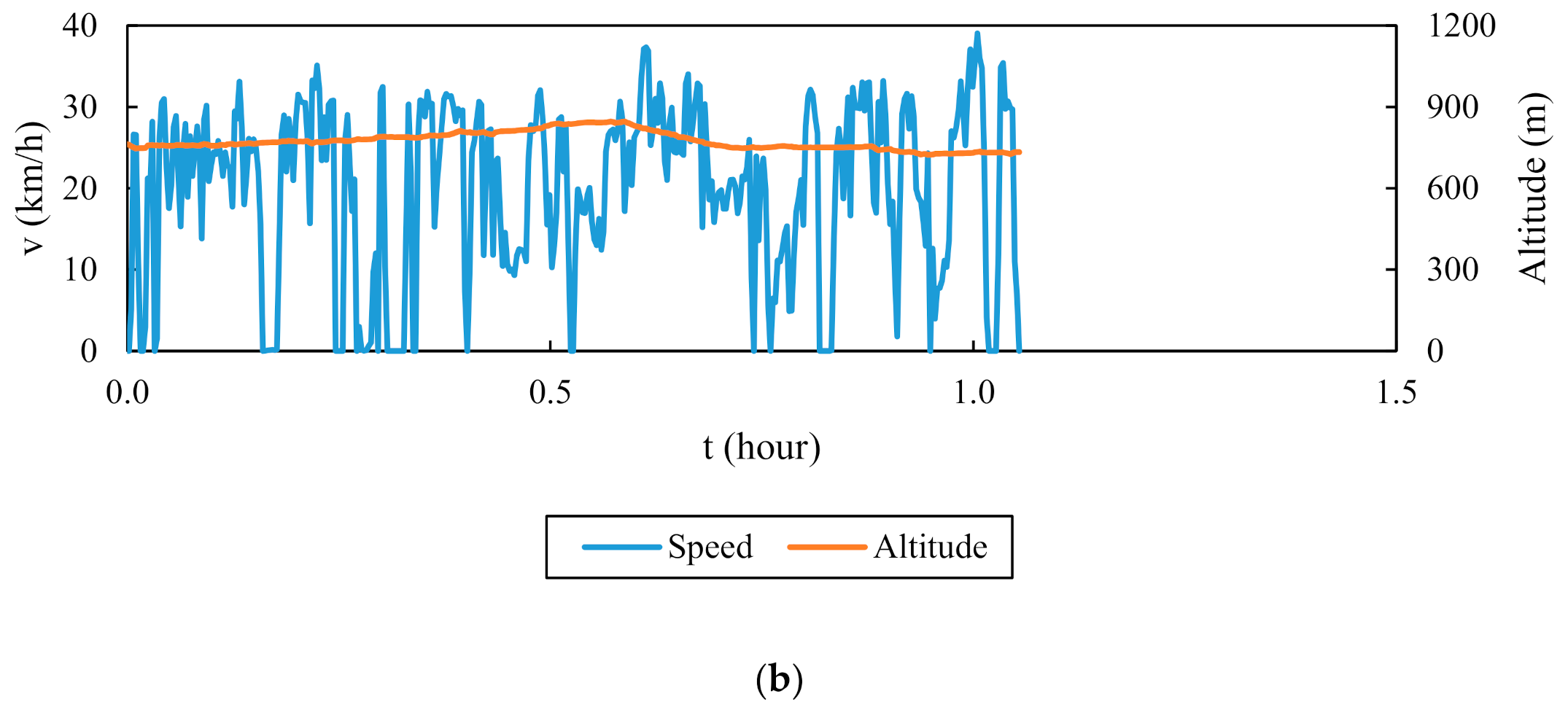
Figure 1). Unlike other vehicle types, such as electric city cars, electric SUVs, electric sedans, electric trucks, or electric buses, which were intensively developed and optimized, limited study has been done to design an energy management system of the e-trike type. The trike type also usually has limited regulation and standards compared to four-wheel or two-wheel vehicles. The energy management system model was developed based on equations of general engineering vehicles. The simulation of the model considers various parameters, such as the usage of battery types, the presence of RE, the implementation of braking strategies, and the variation of RE mass. The significance of each parameter to the energy management system is then comprehensively discussed. The use of universal driving cycles has also been carried out previously to simulate electric trikes with the specifications used in this study. Thus, data collection for the new driving cycle is carried out to describe how the electrical performance of an electric trike is used as a goods delivery vehicle.
4. Discussion
4.1. Non-RE Cases
From
Table 4 and
Table 5, it is shown that the most efficient configuration was by using the serial regenerative braking strategy, followed by the parallel braking strategy. The lost kinetic energy from braking is recovered by the characteristic of the electric motor that functions as a generator. The mechanical power was given to the electric motor; it would convert it into electricity. The LFP battery configuration is 48 p and 24 s, which contributes to a total battery cell of 1152. In contrast, the NCA battery configuration is 27 p and 20 s, contributing to a total battery cell of 540. There was a 113% increase in LFP battery cell number than NCA battery cell, but only a 3.3% increase in energy existed (4995 to 5160 Wh). The increase in battery cell amount means that the e-trike mass will also increase. Thus, the LFP battery configuration has 42.152 kg more than the base case of the NCA battery configuration. An increase in mass will cause more energy consumption in a vehicle due to the three-component of the driving resistances, which are affected by mass (rolling resistance, gradient resistance, and acceleration resistance). This concludes why the usage of the LFP battery type decreases the efficiency of the e-trike.
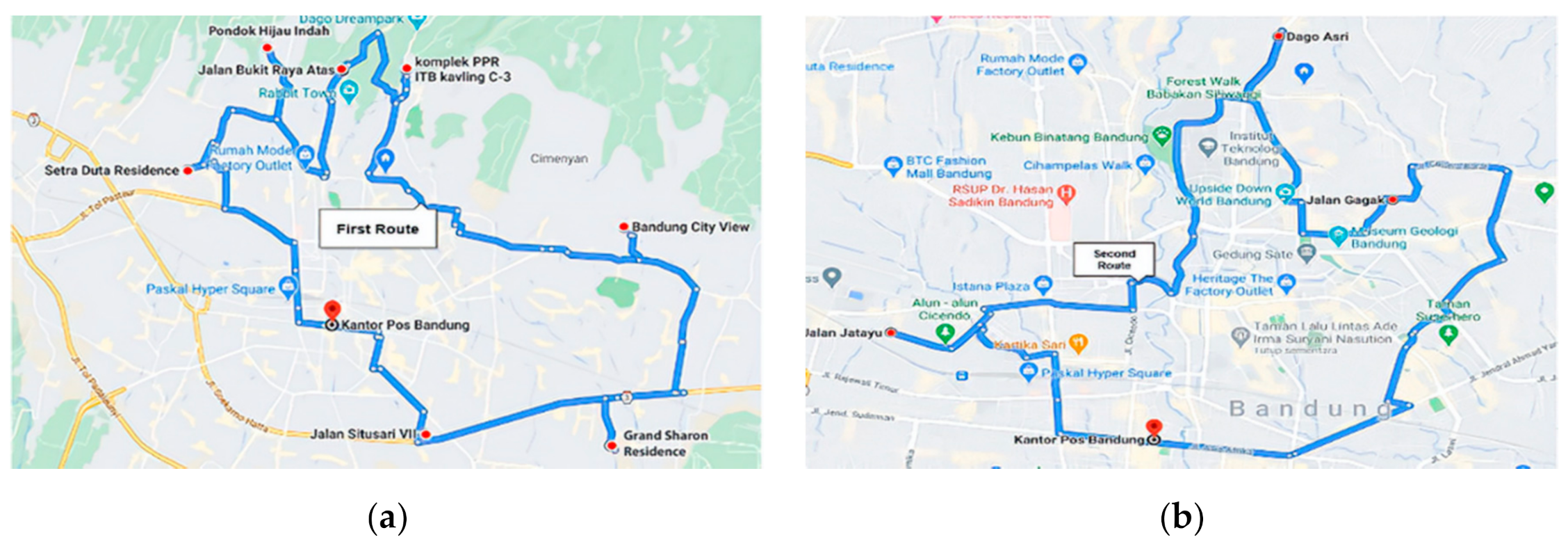
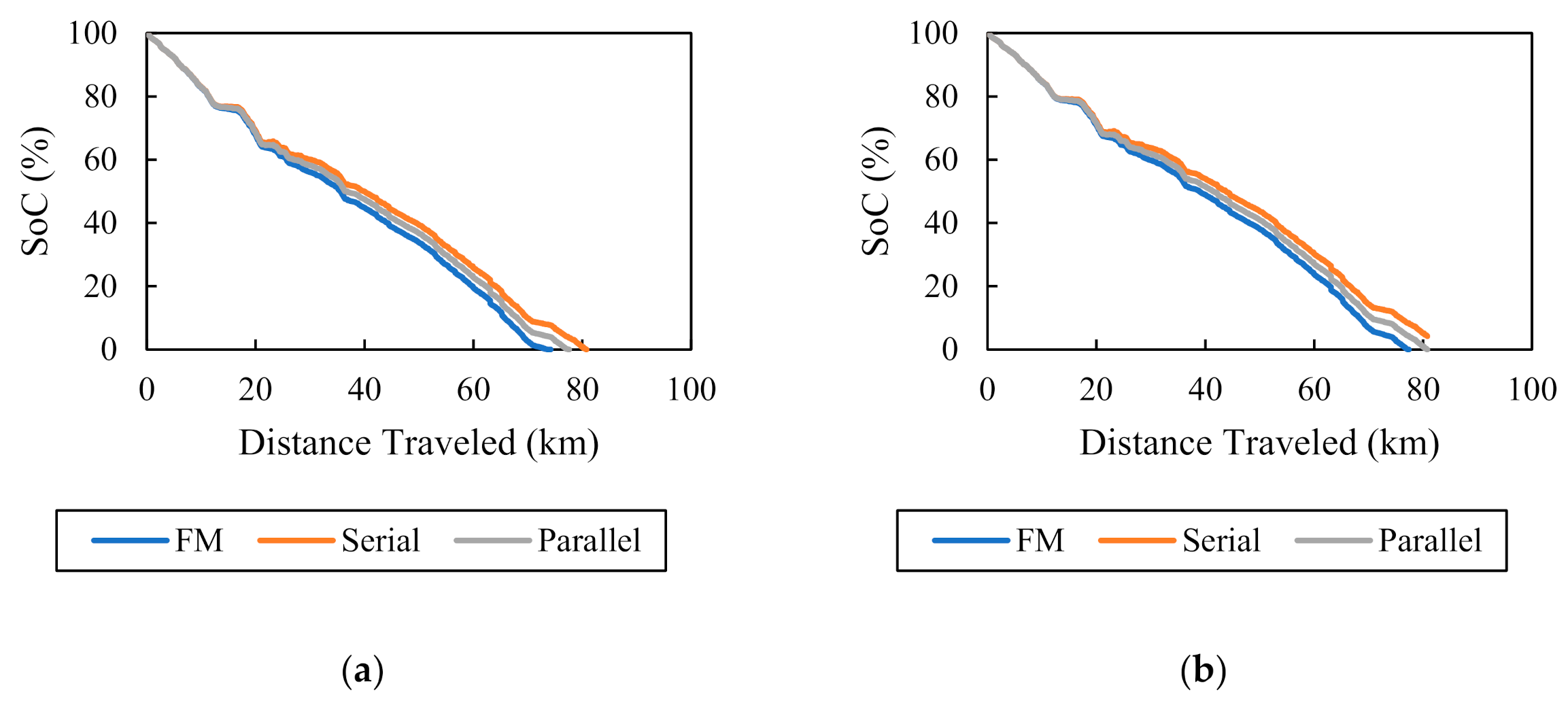
For the first route, all the cases that had been simulated managed to finish the route with a considerable amount of battery SoC. The serial regenerative braking strategy with the NCA battery gave the most amount of remaining SoC battery with 33.84%. This amount of SoC remaining was suitable for the battery as discharging the battery into lower than 30% might decrease the battery life cycle.
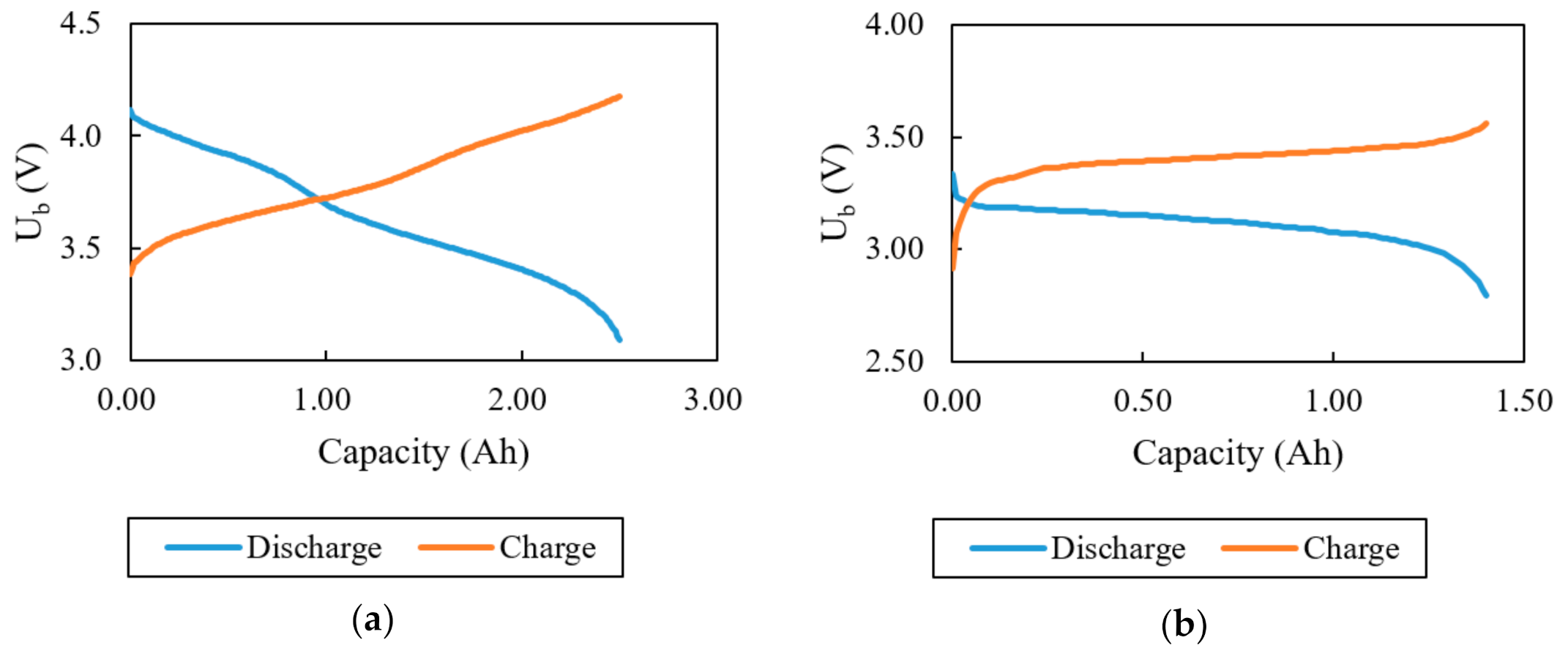
For the complete route, a decreased efficiency was caused by the low voltage of the batteries. The voltage of a battery varied according to its capacity. As the battery SoC was decreasing, the voltage was also decreasing. The lower amount of voltage with the same amount of power required results in a higher amount of current flowing out of the battery. Thus, the battery depletes faster and efficiency decrease. Several cases managed to finish the complete route, which is the NCA with serial and parallel and the LFP with serial. The remaining SoC for the configurations is 9.05%, 3.86%, and 4.60%. These values are not great because not only does it could potentially damage the battery, but also deviations that might happen while the e-trike is driven. If the distance needed is more than the calculations, then there will be a risk of over-discharging the battery.
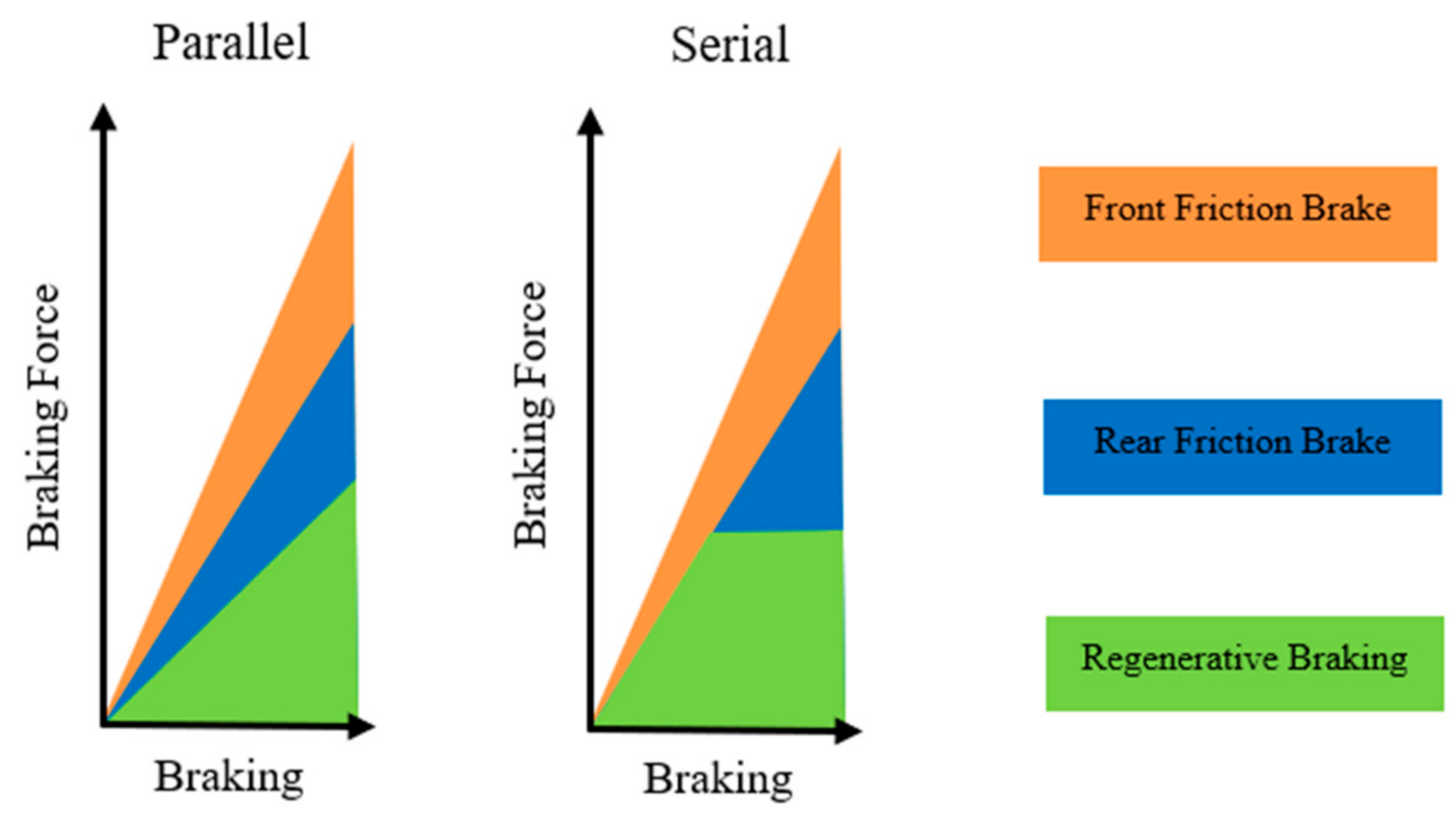
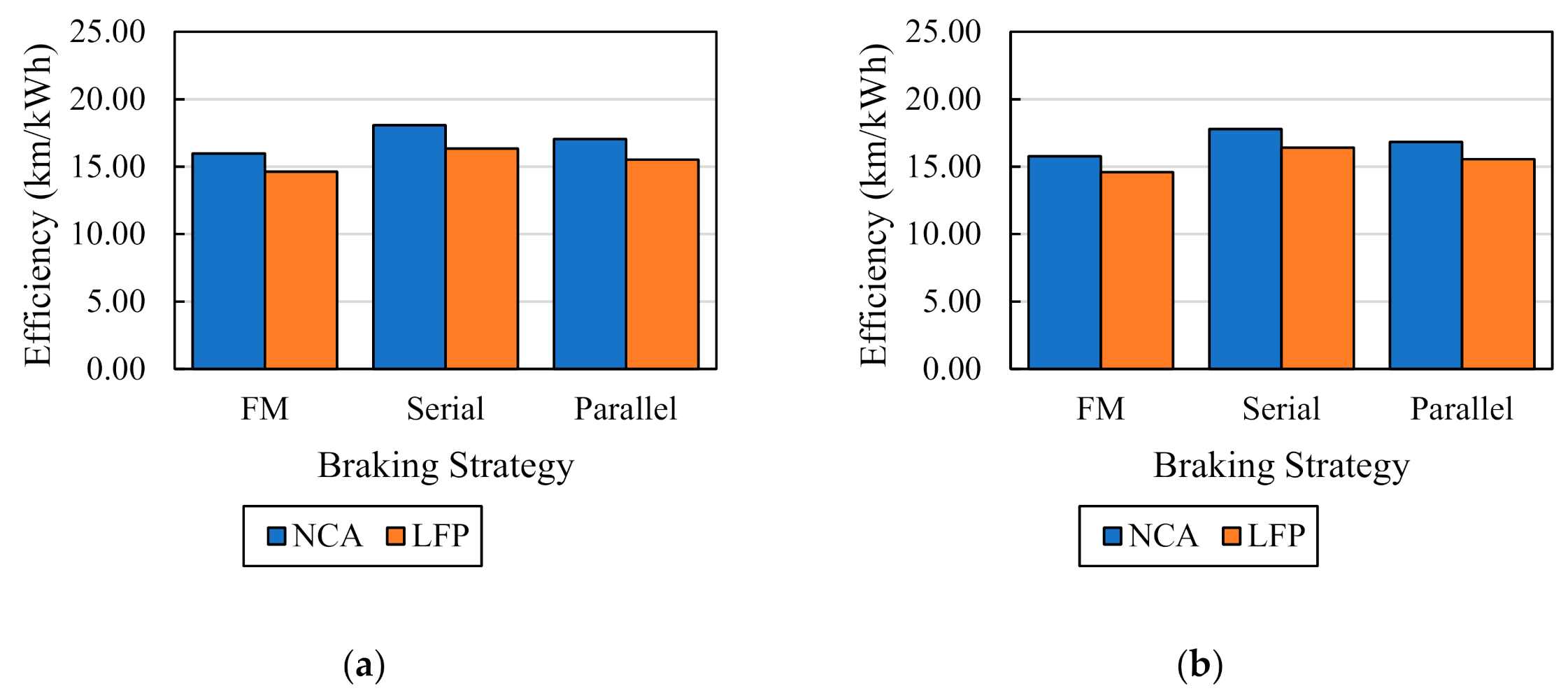
Figure 13 shows that for each battery type, the serial braking strategy offered an average increase an efficiency of 8.84%, while the parallel offered an increase an efficiency of 4.36%. The serial braking strategy was more than double the efficiency increase in the parallel braking strategy because the braking force distribution at the rear wheel for the parallel braking strategy was set to be in a constant number between the friction brake and the regenerative brake, which is set to 0.5 apiece. While the serial braking strategy used the regenerative braking for the rear brakes until the maximum brake torque available for the electric motor was reached, and then it used the friction brake. Overall, the NCA battery had more battery SoC remaining and more efficiency for each of the respective braking strategy.
4.2. RE Cases
For the RE cases, the addition of a RE added more mass to the vehicle, which caused more energy consumption. From
Table 6 and
Table 7, it is shown that there are several cases where the usage of RE does not fulfill the target time operation of the RE, which is 600 s. Those cases were the full mechanical braking using NCA and LFP battery and LFP battery with serial regenerative braking with 20 kg and 36.3 kg RE.
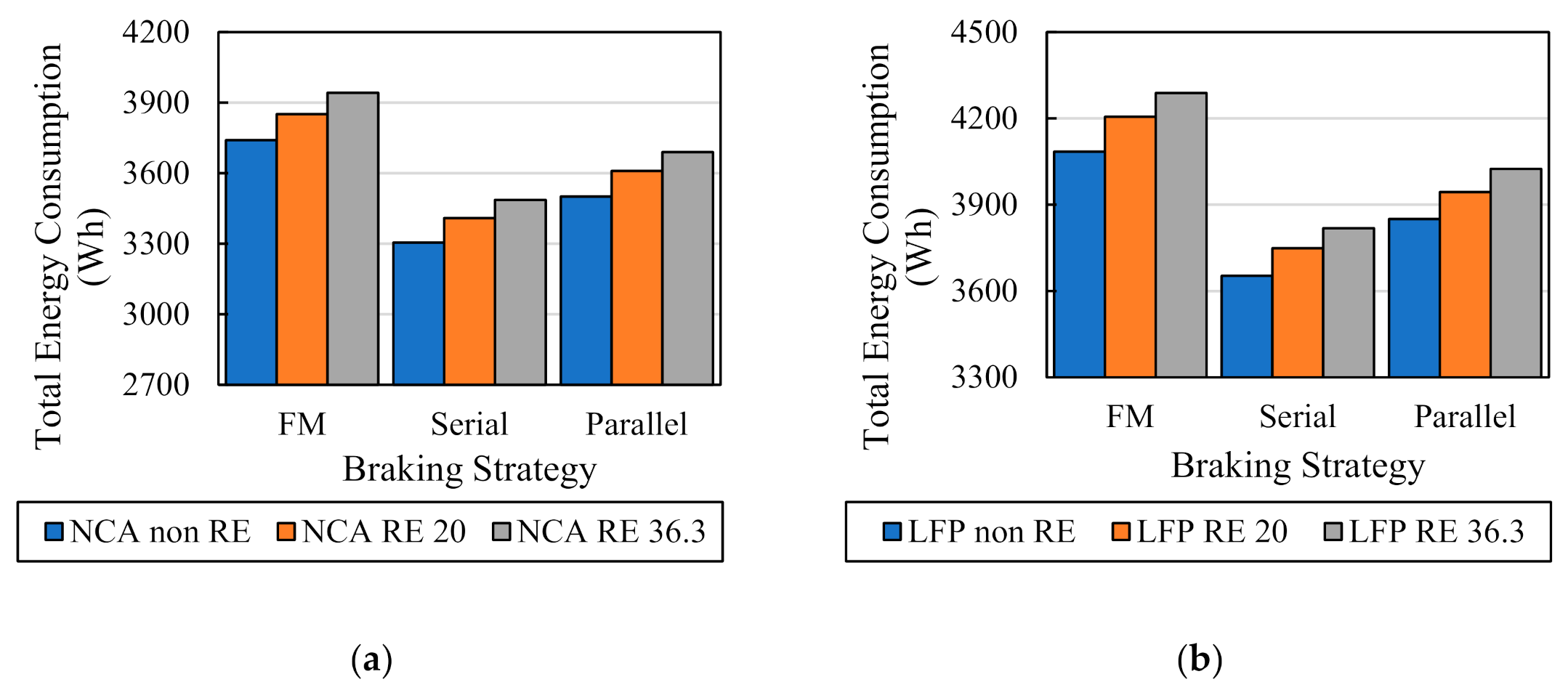
Figure 14 compares the total energy consumption for each braking strategy with NCA battery and LFP battery, respectively, with non-RE and RE cases for the first route. For every case, the heavier the RE mass, the more energy is used for the e-trike. It also shows that the serial regenerative braking with the NCA battery gave the least amount of energy consumed even without using a RE.
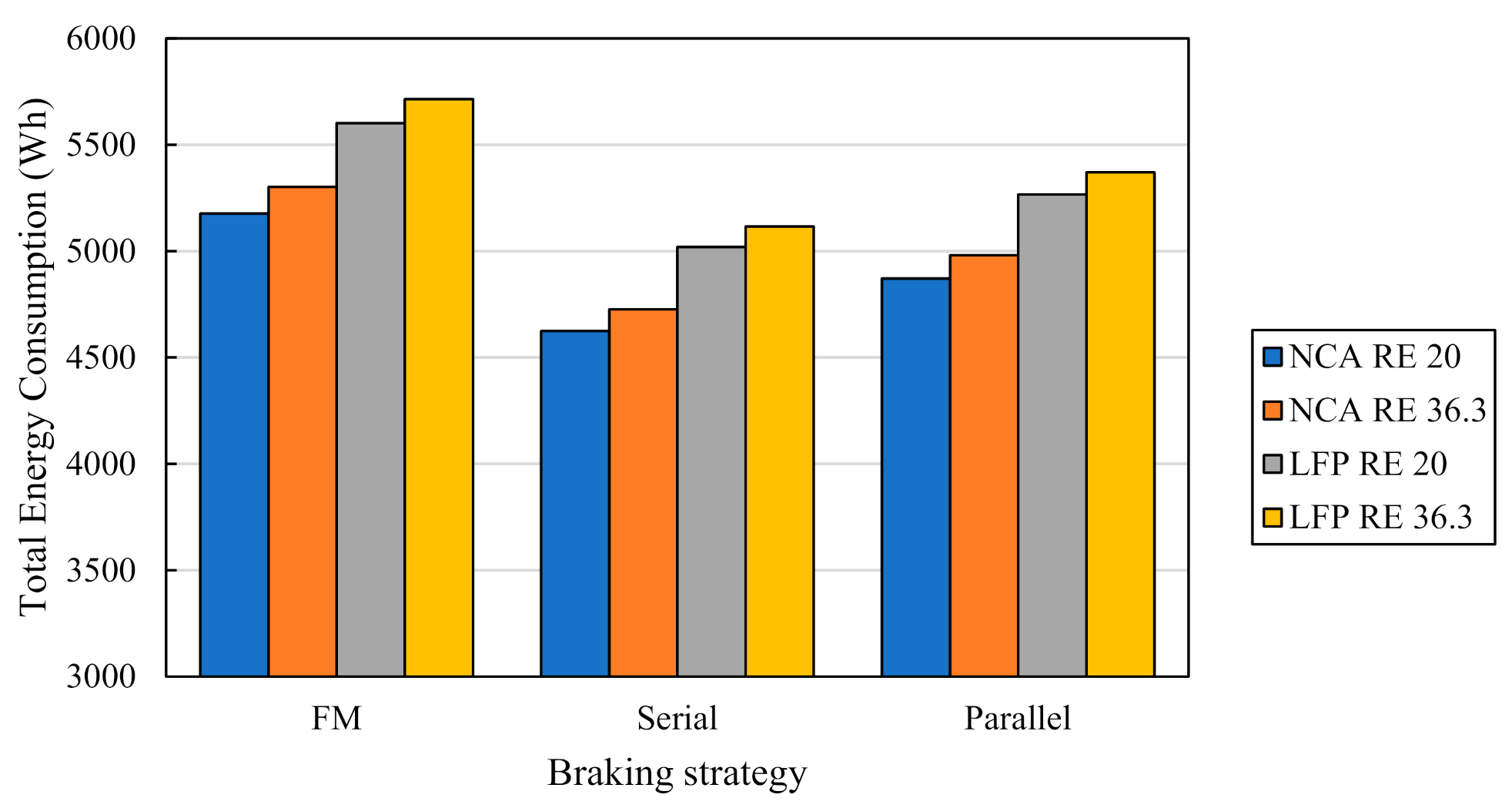
Figure 15 shows the comparison of energy consumption between RE cases with a complete route. As expected, the 20-kg RE combination with NCA and LFP battery consumed less energy than using 36.3 kg RE for each braking strategy. Serial regenerative braking strategy having the least amount of energy consumed. The total mass of the LFP battery (42.152 kg) and RE proved that the combination between LFP and RE configuration is too heavy, even using 20 kg or 36.3 kg RE. The energy consumption is much higher than the NCA battery combination configurations.
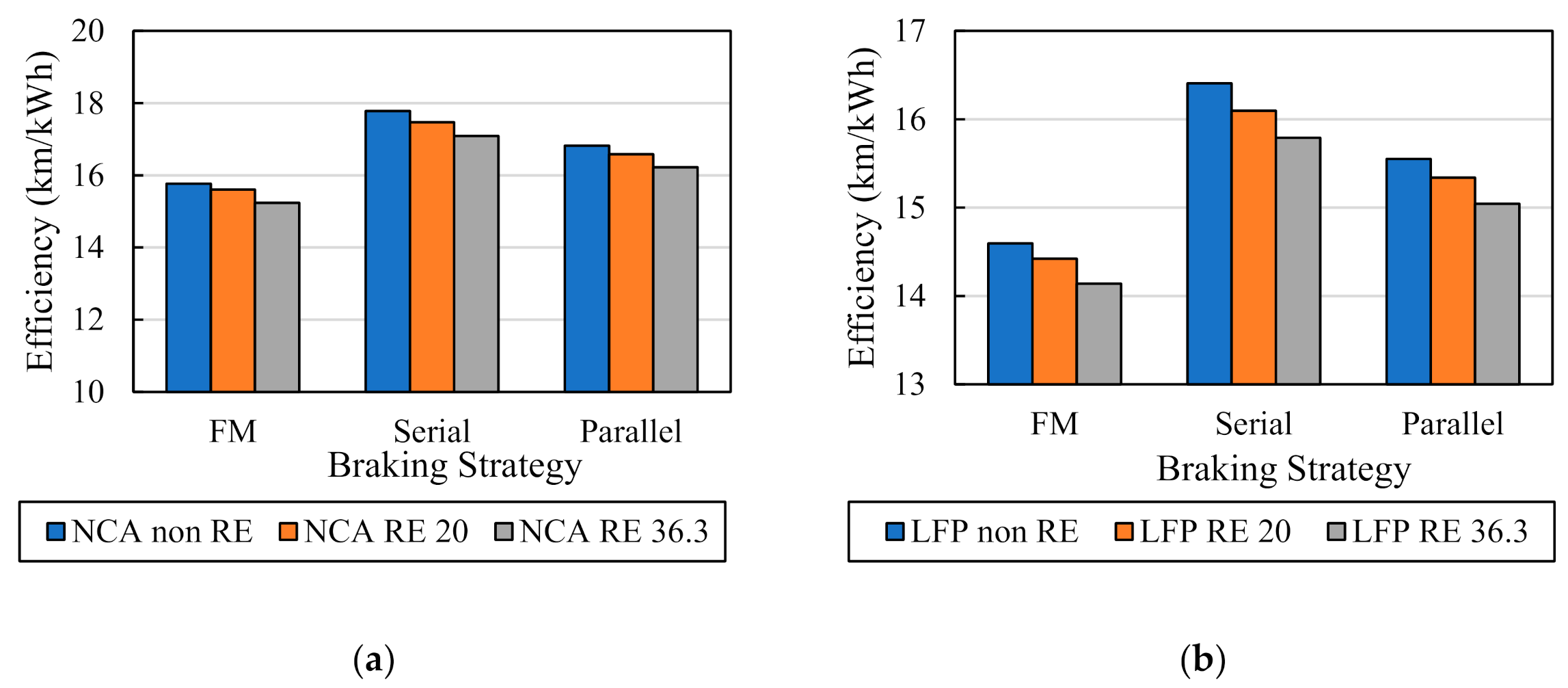
Figure 16 shows the efficiency comparison between the RE cases and non-RE cases for the complete route. The ranking of the most efficient configuration combinations is NCA battery with serial regenerative braking strategy non-RE at 17.78 km/kWh, NCA serial RE 20 at 17.47 km/kWh, and NCA serial RE 36.3 at 17.09 km/kWh. The addition of RE did not increase the efficiency because of the mass added. As previously stated, the higher mass, the more the consumption of energy. The decrease of 1.8% efficiency from NCA serial non-RE to NCA serial RE 20 kg is still fine with the addition of greater safety factor and longer-lasting battery life due to higher remaining SoC.
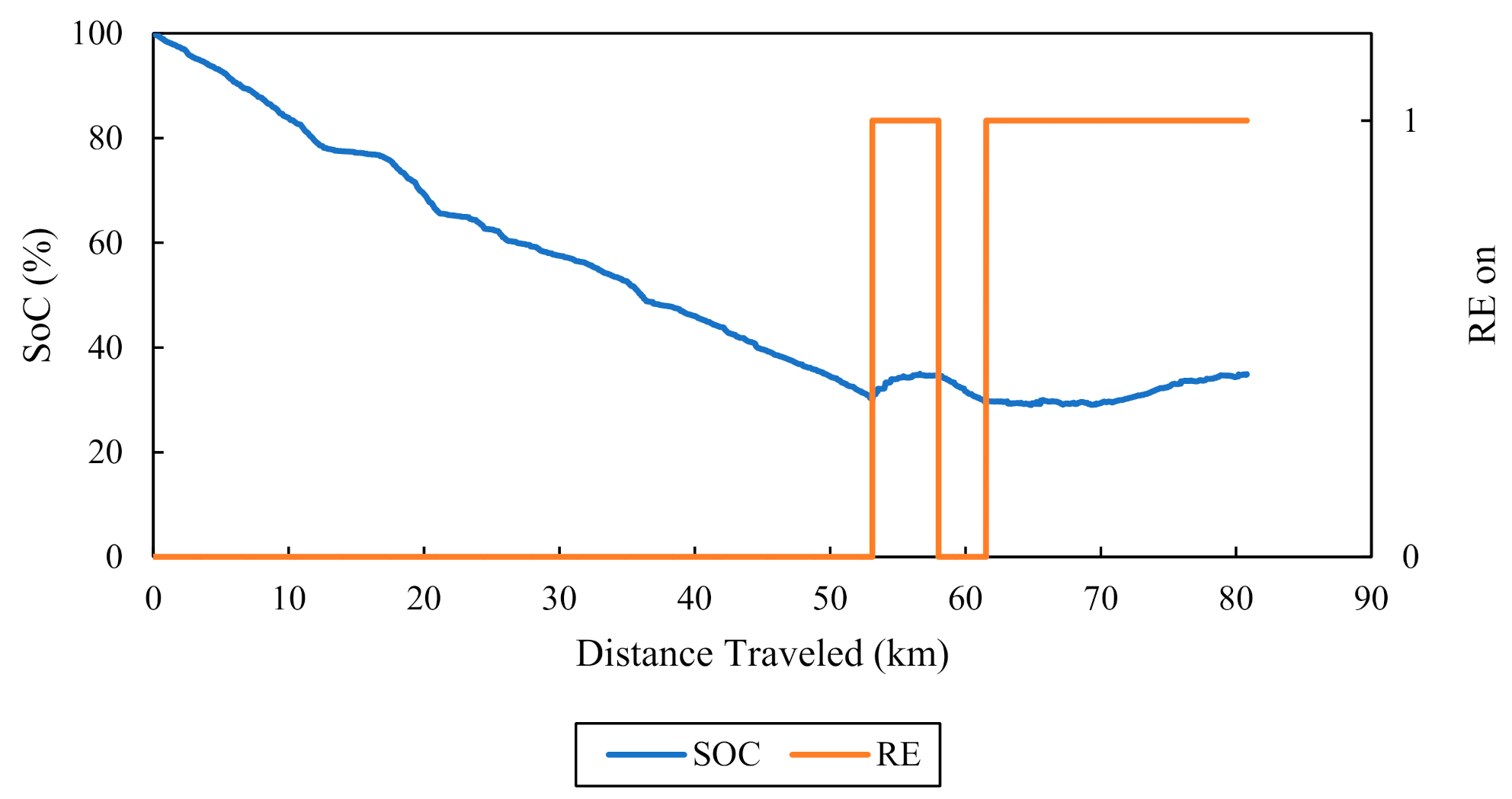
4.3. Effect of RE
From the RE case discussion, it is concluded that the addition of RE into the e-trike reduces its efficiency. Additionally, the less amount of RE mass, the higher the efficiency of the vehicle. The cases that were simulated in this research were unable to showcase the effect of the RE, albeit by its range addition or efficiency. Nevertheless, one certain thing is that a RE guarantees that the e-trike finishes the route with at least around 30% battery SoC. This chapter focuses on further research on the impact of a RE on the e-trike’s performance.
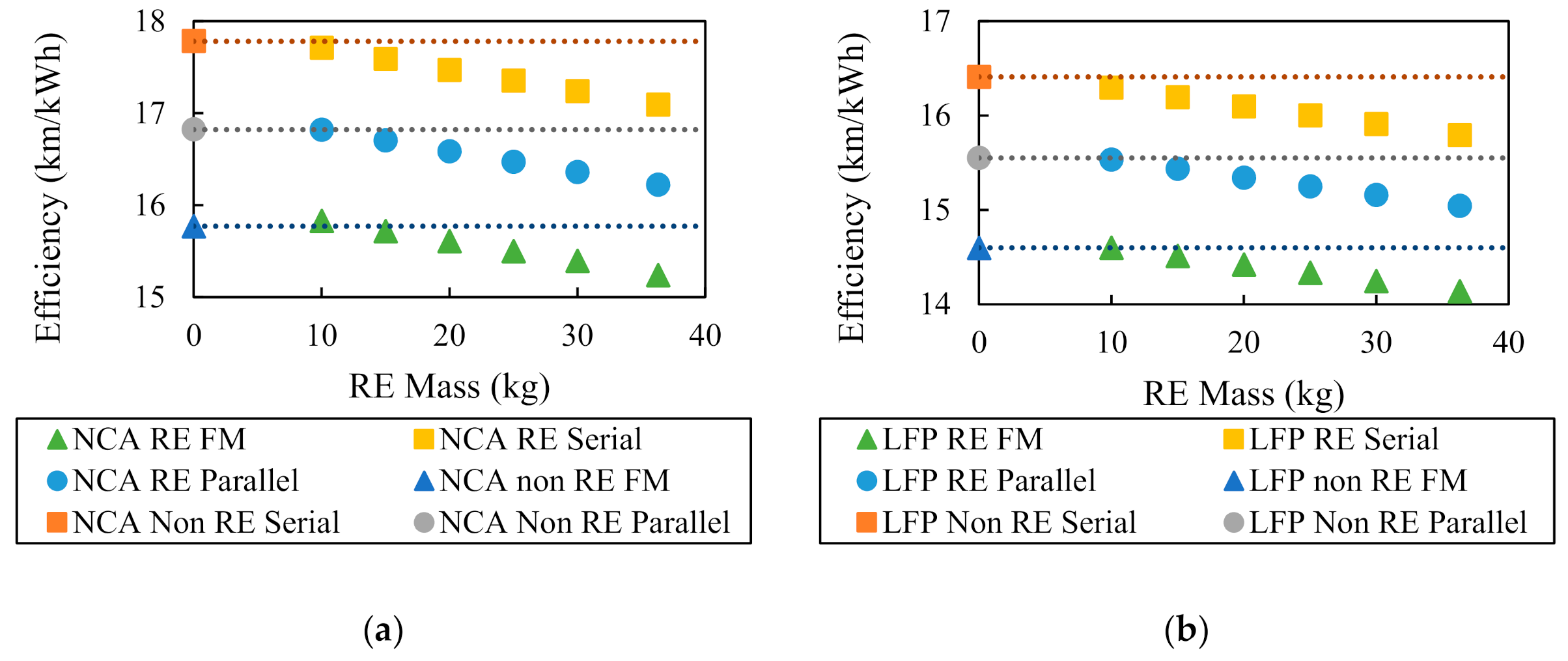
Figure 17 shows the results of several variations of RE mass ranging from 10, 15, 20, 25, 30, and 36.3 kg for NCA battery and LFP battery, respectively. For the NCA full mechanical configuration, the maximum mass of RE allowed increasing the efficiency from the non-RE case is around 15 kg. For the NCA parallel configuration, the maximum mass of RE allowed increasing the efficiency is also around 15 kg. For the NCA serial configuration, however, the maximum is around 10 kg. These numbers are quite impossible to obtain with the current RE technology. However, these numbers should be the target for future improvements regarding RE mass. These numbers also show that the current design of the e-trike is already quite efficient and a higher power-to-weight ratio of the RE is needed for its efficiency to increase.
For the LFP full mechanical configuration, the maximum mass allowed for the efficiency to increase is around 15 kg. For the LFP parallel configuration, the maximum mass allowed for the efficiency to increase is around 10 kg. For the LFP serial, however, the maximum mass allowed is less than 10 kg. Again, these numbers are impossible to achieve with the current technology. The maximum mass allowed is less than that of the NCA configurations, even though the LFP has significantly less efficiency and more energy usage. This means that the added LFP mass with the added RE mass is too high for the e-trike. The LFP has much lower specific energy than the NCA, thus requiring much more battery cells to provide around the same amount of energy. For the LFP configurations, perhaps a downsizing of the battery could be done, and an increase in the power of the RE could be done.
4.4. Design Evaluation of the e-Trike
From the simulation and analysis that have been conducted in the previous chapter, the energy usage of each variation was compared with each other in terms of its effectiveness (distance traveled) and efficiency (distance traveled/energy consumption).
Table 10 shows the efficient configuration for the first route. All the cases were proven to be effective with every case have a remaining SoC of at least 20%. Less than 30% of the SoC left might affect the battery life cycle, but every case was effective. In terms of efficiency, the most efficient configuration for the first route was the NCA battery with the serial regenerative strategy without a RE, with 17.26 km/kWh. The base case of the e-trike, which is the NCA battery with full mechanical braking and no RE yields and efficiency of 15.81 km/kWh, is mediocre compared to other configurations.
Table 11 shows the efficient configuration for the complete route. The non-RE case of NCA serial regenerative braking was effective and efficient, with 16.88 km/kWh. Although, the remaining SoC was 4%, which could potentially run out while in the process, leading to over-discharging of the battery and damage to the battery. Additionally, all the RE cases were effective in this case. Three of the most efficient causes were the serial regenerative braking case, which is undoubtedly great for efficiency. Although, the usage of serial regenerative braking might feel odd for the driver, as motor braking gave a different feel and different response times. The solution for this problem is using the parallel regenerative braking cases, giving not only a decent amount of efficiency (15.98 and 15.61 km/kWh) but also a quicker response time and better safety.
None of the LFP cases were made into the most efficient configurations since having been discussed before, which is the added mass. Therefore, the LFP battery is not suitable for the e-trike, or electric vehicle in general because of its low specific energy. The NCA battery has a clear advantage over the LFP in terms of specific energy (NCA 201.87 Wh/kg, LFP 97.13 Wh/kg). The LFP itself has advantages over the NCA, which is an excellent safety and long-life span. The NCA itself is an excellent battery with high energy and power density, but it has a high cost, and its safety is a bit questionable [
28].
In conclusion, the best configuration for the e-trike in terms of efficiency is the NCA battery with serial regenerative braking strategy with no RE equipped. Although the remaining battery SoC is 4%, which can lead to over-discharging of the battery and then damage the battery life. Additionally, the main operating hour is still three hours on the first route only, and this configuration also gives the best efficiency for the first route. In case that the complete route must be completed, this configuration can complete it as well. The next best configuration will be the NCA serial regenerative braking with RE equipped. This configuration ensures that if the e-trike must complete the whole route, the e-trike will not have any problems completing it. The next best configuration for effectiveness and efficiency is the NCA, with a parallel braking strategy and RE equipped. This configuration might give less efficiency but give a better response time in braking and better safety.
5. Conclusions
A model of an energy management system based on equations of general engineering vehicles using Matlab software has been created. The model has considered many possible configurations, including typical braking strategies, the appearance of range extender including control strategy and its mass variation, and accommodating other possible electric motors/transmission configurations. Thus, other researchers can easily follow our algorithm implemented to the other type of vehicle or driving cycle required. The implementation of RE gives more effectiveness to the e-trike because it increases the range of the e-trike, although, in this case, the e-trike has almost fulfilled the needed distance. The heavier the mass of the RE, the more energy the e-trike consumes. For the e-trike to be more efficient than the non-RE case, the mass of the RE should be limited. The current design of the e-trike is only effective for the first route, but not effective for the complete route, and it is not efficient enough. The best configuration for the proposed e-trike in terms of efficiency and effectiveness for both routes is the NCA battery with serial regenerative braking and no RE needed (17.26 km/kWh and 16.88 km/kWh for first and complete route).
An experiment using the e-trike should be done to validate further the results obtained from this research. A dynamic approach model regarding the e-trike could be done for the next research for the results to be more accurate and to optimize the performances of the e-trike. Further research on the optimization of the serial and parallel regenerative braking systems can be done further to improve the performance and efficiency of the e-trike. Further developments to reduce the mass of the RE needs to be conducted to achieve a higher vehicle efficiency.

 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}